1
KONTROL KECEPATAN MOTOR DC MENGGUNAKAN PID
KONTROLER YANG DITUNNING DENGAN FIREFLY ALGORITHM
Oleh :
Machrus Ali
Teknik Elektro Universitas Darul Ulum
ABSTRAK
Konstruksi motor Direct Current DC sangat mirip dengan generator DC. Diperlukan pengaturan kecepatan motor dengan beberapa metode kontroler, agar diperoleh metode terbaik untuk model motor DC. Pemodelan system pengaturan motor Motor DC harus disesuaikan dengan karakteristik motor DC dan model pengaturannya. Metode kontrol Proporsional-Integral-Derivative (PID) banyak diterapkan di bidang industri. Kontroler ini memiliki parameter-parameter pengontrol, yaitu Kp, Ki, dan Kd. Ketiga parameter tersebut diturunkan dari perhitungan matematis pada metode PID konvensional. Metode osilasi Ziegler-Nichols merupakan sebuah metode penalaan PID yang dapat dilakukan secara otomatis tanpa memodelkan sistem. Paper ini digunakan untuk membandingkan perancangan kecepatan motor DC tanpa controller, dengan manual controller, dengan PID tanpa Artificial Intelegence (AI) dan dengan menggunakan Proporsional-Integral-Derivative (PID) yang dituning dengan 2 (dua) AI. AI yang digunakan adalah Firefly Algorithm (FA). Sistem kontrol kecapatan motor DC yang paling baik adalah kontrol PID_FA, kemudian dengan kontrol, PID-ZN, PID dan Nonkontrol. Didapatkan nilai; overshoot tanpa kontrol 0, settling time 7,75 detik, overshoot PID standart 1,347, settling time 10 detik, overshoot PID-ZN 1,576 settling time 2 detik, , overshoot PID-FA 1,203 settling time 1,25 detik
Kata kunci : PID, DC Motor, Speed Control, FA 1. PENDAHULUAN
Motor DC telah banyak digunakan dalam industri meskipun biaya pemeliharaannya lebih tinggi dari motor induksi. Proporsional-Integral-Derivative (PID) kontroler telah banyak digunakan untuk kecepatan dan posisi kontrol motor DC(J. Bates, 1993). Pencapaian jurnal digunakan untuk merancang sistem kontrol menggunakan kontroler Ziegler-Nichols dan Firefly Algorithm dengan mempertimbangkan non linearitas yang efektif dari sistem. Dengan membandingkan metode FA dan tanpa tuning system yang akan didapat dilihat hasil pencapaian pengoptimalan masing-masing metode.
2. KAJIAN PUSTAKA
Motor DC atau motor arus searah adalah mesin yang mengubah energi listrik DC menjadi energi mekanis, konstruksi motor DC sangat mirip dengan generator DC. Mesin yang bekerja baik sebagai generator baik pula bekerja sebagai motor. Suatu perbedaan didalam konstruksinya sebaiknya diperhatikan antara motor dan generator. Karena motor seringkali dioperasikan dilokasi yang mungkin mudah mendapatkan kerusakan mekanis debu, lembab atau korosif, maka motor biasanya lebih tertutup rapat dibandingkan generator.(K. Ogata, 1987)
2
Pada motor arus searah pengaturan putarannya mudah dan dapat diatur dalam daerah yang sangat lebar. Generator arus searah bekerja berdasarkan perinsip hukum faraday, sedangkan arah gaya yang menimbulkan kopel pada arus searah berdasarkan kaidah tangan kiri. Untuk mesin arus searah berlaku suatu persamaan umum :
E = Vt – Ia. Ra atau Vt = E + Ia. Ra ………...(2-1) Dimana :
E = Tegangan jangkar / ggl lawan (Volt) Vt = Tagangan sumber/ tegangan jala-jala (volt) Ia = Arus jangkar (Ampere)
Ra = Tahanan jangkar (Ohm)
2.1.Pengertian Motor Arus Searah
Motor arus searah ialah suatu mesin yang berfungsi untuk mengubah energi listrik arus searah (listrik DC) menjadi energi gerak atau energi mekanik, dimana energi mekanik tersebut berupa putaran dari rotor.
Dalam kehidupan kita sehari-hari motor DC dapat kita lihat pada motor starter mobil, pada tape recorder, pada mainan anak-anak dan sebagainya. Sedangkan pada pabrik-pabrik motor motor DC kita jumpai pada elevator, konveyer dan sebagainya.
Untuk lebih jelasnya dapat dilihat pada gambar di bawah ini :
Gambar 2.2 Motor Arus Searah Pada motor arus searah kopel (torque) yang dibangkitkan : T = k..Ia, k = konstan
2.2. Prinsip Kerja Motor Arus Searah
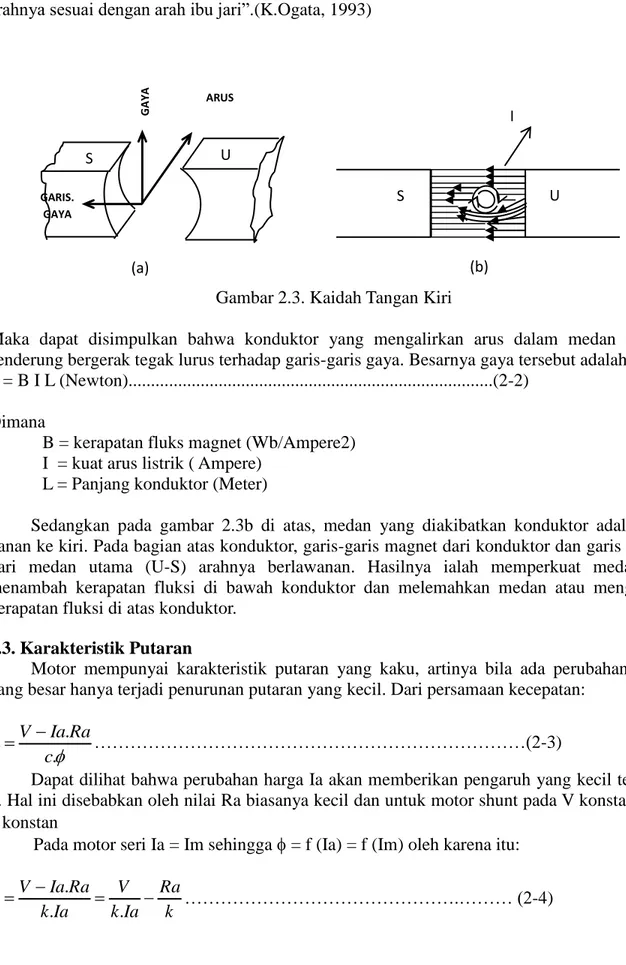
Dalam pengoperasian suatu motor listrik akan terjadi perubahan dari energi listrik menjadi energi mekanik. Perinsip kerjanya berdasarkan atas perinsip hukum lentz bahwa apabila suatu penghantar yang dialiri arus listrik diletakkan dalam suatu medan magnet, maka akan timbul gaya mekanik. Bila arus listrik yang mengalir dalam kawat arahnya menjauhi kita (maju), maka medan-medan yang terbentuk disekitar kawat arahnya searah dengan arah putaran jarum jam. Sebaliknya bila mana arus listrik dalam kawat arahnya berlawanan dengan arah putaran jarum jam. Atau dengan kata lain jika sebuah kawat dialiri arus listrik diletakkan diantara dua buah kutub magnet, maka pada kawat itu akan bekerja suatu gaya yang menggerakkan kawat tersebut. Arah gerak kawat itu dapat ditentukan dengan kaidah tangan kiri yang berbunyi “apabila tangan kiri terbuka diletakkan diantara kutub utara (U) dan selatan (S), sehingga garis-garis gaya yang keluar dari kutub utara menembus telapak tangan kiri dan arus
E > + - Ia Sumber arus searah n Kumparan medan If
3 G A Y A GARIS. GAYA ARUS U S S U I (b) (a)
di dalam kawat mengalir kearah keempat jari-jari, maka kawat itu akan mendapat gaya yang arahnya sesuai dengan arah ibu jari”.(K.Ogata, 1993)
Gambar 2.3. Kaidah Tangan Kiri
Maka dapat disimpulkan bahwa konduktor yang mengalirkan arus dalam medan magnet cenderung bergerak tegak lurus terhadap garis-garis gaya. Besarnya gaya tersebut adalah: F = B I L (Newton)...(2-2)
Dimana :
B = kerapatan fluks magnet (Wb/Ampere2) I = kuat arus listrik ( Ampere)
L = Panjang konduktor (Meter)
Sedangkan pada gambar 2.3b di atas, medan yang diakibatkan konduktor adalah dari kanan ke kiri. Pada bagian atas konduktor, garis-garis magnet dari konduktor dan garis magnet dari medan utama (U-S) arahnya berlawanan. Hasilnya ialah memperkuat medan dan menambah kerapatan fluksi di bawah konduktor dan melemahkan medan atau mengurangi kerapatan fluksi di atas konduktor.
2.3. Karakteristik Putaran
Motor mempunyai karakteristik putaran yang kaku, artinya bila ada perubahan beban yang besar hanya terjadi penurunan putaran yang kecil. Dari persamaan kecepatan:
. . c Ra Ia V n ………(2-3)
Dapat dilihat bahwa perubahan harga Ia akan memberikan pengaruh yang kecil terhadap n. Hal ini disebabkan oleh nilai Ra biasanya kecil dan untuk motor shunt pada V konstan maka
konstan
Pada motor seri Ia = Im sehingga = f (Ia) = f (Im) oleh karena itu:
k Ra Ia k V Ia k Ra Ia V n . . . ……….……… (2-4)
4
Motor kompon mempunyai sifat antara motor seri dan shunt, menurut arah belitan penguat magnet, motor kompon ada 2, yaitu:
1. Komulatif jika medan shunt dan seri saling memperkuat
I = Ish + Ise, maka = sh + se ……… (2-5) 2. Differensial jika medan seri memperlemah medan shunt
I = Ise = Ish + Ia, maka a = se - sh ………..……. (2-6)
Gambar 2.3 Karakteristik Putaran
3. MODEL MOTOR DC
Sebuah motor listrik mengubah energi listrik menjadi energi mekanik dengan menggunakan berinteraksi medan magnet. Motor listrik yang digunakan untuk berbagai operasi perumahan, komersial, dan industri. Gulungan motor DC shunt terdiri dari medan shunt dihubungkan secara paralel dengan armature. Medan shunt memiliki ketahanan yang lebih tinggi dan arus yang lebih rendah dibandingkan dengan medan shunt seri. Akibatnya, motor ini memiliki kecepatan dan kontrol posisi yang sangat baik. Oleh karena itu DC shunt motor biasanya digunakan aplikasi yang membutuhkan tenaga kuda lima kali atau lebih. Persamaan menggambarkan perilaku dinamis dari motor DC berdasarkan diagram skematik pada Gambar (3.1) diberikan oleh persamaan berikut;
𝑽𝒂 = 𝑹𝒂. 𝒊𝒂(𝒕)+ 𝑳𝒂.𝒅𝒊𝒂(𝒕)
𝒅𝒕 + 𝒆𝒃(𝒕) ………..(3.1)
Gambar 3.1. Skematik diagram motor DC
5 𝑇𝑚(𝑡) − 𝐾𝑇. 𝑖𝑎(𝑡) ………. (3.3) 𝑇𝑚(𝑡) = 𝐽𝑚. 𝑑𝑤(𝑡) 𝑑𝑡 + 𝐵𝑚. 𝑤(𝑡) ……….. (3.4) Kemudian 𝑇𝑚(𝑡) = 𝐽𝑚. 𝑑𝜃(𝑡) 𝑑𝑡 + 𝐵𝑚. 𝑑𝜃(𝑡) 𝑑𝑡 ……….. (3.5)
Transfer fungsi akan diberikan:
Θ (s) / v (s) = Kb / [J La S3 + (Ra J + B La) S2 + (KB2 + Ra B) S] …... (3.6) Dimana:
Va = Angker tegangan (V)
Ra = resistansi angker (Ω)
La = induktansi angker (H)
Ia = arus dinamo (A)
Eb = back emf (V)
w = kecepatan sudut (rad / s) Tm = torsi motor (Nm)
= posisi sudut dari poros rotor (rad) Jm = rotor inersia (kg)
Bm = koefisien gesekan viskos (Nms / rad)
KT = konstanta torsi (Nm / A)
Kb = konstanta back emf (Vs / rad)
Dengan memasukkan parameter Motor DC didapat Ra = 2,45 Ω, La = 0,035 H, Kb = 1,2
Vs/rad, Jm = 0,022 kgm2, Bm = 0,5.10-2 Nms/rad
Sehingga Transfer function motor DC yang digunakan adalah:
𝜃(𝑠)
𝑉𝑎(𝑠)
=
1,2
0,00077𝑠3+0,0539𝑠2+1,441𝑠 ……… (3.7)
3.1. Tuning PID Kontroller Menggunakan Beberapa Metode A. Ziegler-Nichols Metode Tuning:
Ada dua metode untuk penentuan parameter kontroler PID Ziegler-Nichols disebut tala aturan. Tetapi metode yang diterima secara luas untuk tuning kontroler PID adalah metode sederhana. Pertama, mengatur controller ke mode P saja. Berikutnya, mengatur gain dari controller (Kp) ke nilai yang kecil. Akhirnya, menyesuaikan sampai respon diperoleh yang menghasilkan osilasi terus menerus. Hal ini dikenal sebagai gain tertinggi (Kp) atau ditunjukkan bahwa periode osilasi dikenal sebagai periode utama (Ku). Langkah-langkah yang diperlukan untuk metode yang diberikan di bawah: Koefisien integral (Ki) dan derivatif (Kd) harus mengatur ke nol.Secara bertahap meningkatkan koefisien proporsional dari nol sampai sampai sistem hanya mulai berosilasi terus menerus. Koefisien proporsional pada titik ini disebut gain tertinggi (Tu). (O. Dwyer, 1999)
Tunning Ziegler_Nicols didapatkan Critikal gain Ku = 84 dan Kritikal periode Tu = 0,15 detik dan PID controller dapat dilihat pada gambar 3.3. dimana Kp = 49,41, ki = 0,075 dan Kd = 0,01875
6
Gambar 3.3. Block Diagram PID Controller Tuning Ziegler-Nichols
C. Firefly Algorithm
C. 1. Perilaku Kunang – Kunang
Firefly Algorithm (FA) adalah sebuah algoritma metaheuristik yang terinspirasi dari
perilaku berkedip kunang-kunang. Algoritma ini dikembangkan oleh Dr Xin-She Yang di Universitas Cambridge pada tahun 2007. Ada banyak spesies kunang – kunang dan sebagian besar menghasilkan cahaya dalam durasi yang pendek dan memiliki ritme tertentu. Cahaya dihasilkan dari proses bioluminiscene. Terdapat dua fungsi fundamental dari cahaya tersebut, yaitu untuk menarik perhatian kunang – kunang yang lain (komunikasi) dan untuk bertahan dari serangan predator. Fungsi lainnya untuk mekanisme peringatan bahaya. Cahaya ini dimiliki oleh firefly, baik jantan maupun betina. (Yang, X, S (2009)
Dr Xin-She Yang mengembangkan Firefly Algorithm berdasarkan kebiasan dan pola kehidupan firefly tersebut. Dalam merumuskan Firefly Algorithm, Dr Xin-She Yang mengasumsikan beberapa aturan :
1. Semua firefly itu berjenis kelamin satu sehingga kunang– kunang akan tertarik pada
firefly lain terlepas dari jenis kelamin mereka.
2. Daya tarik sebanding dengan tingkat kecerahan firefly, maka firefly dengan tingkat kecerahan lebih rendah akan tertarik dan bergerak ke firefly dengan tingkat kecerahan lebih tinggi, kecerahan dapat berkurang seiring dengan bertambahnya jarak.
3. Jika tidak ada firefly yang lebih terang dari firefly yang diberikan, maka kunang-kunang ini akan bergerak secara random.
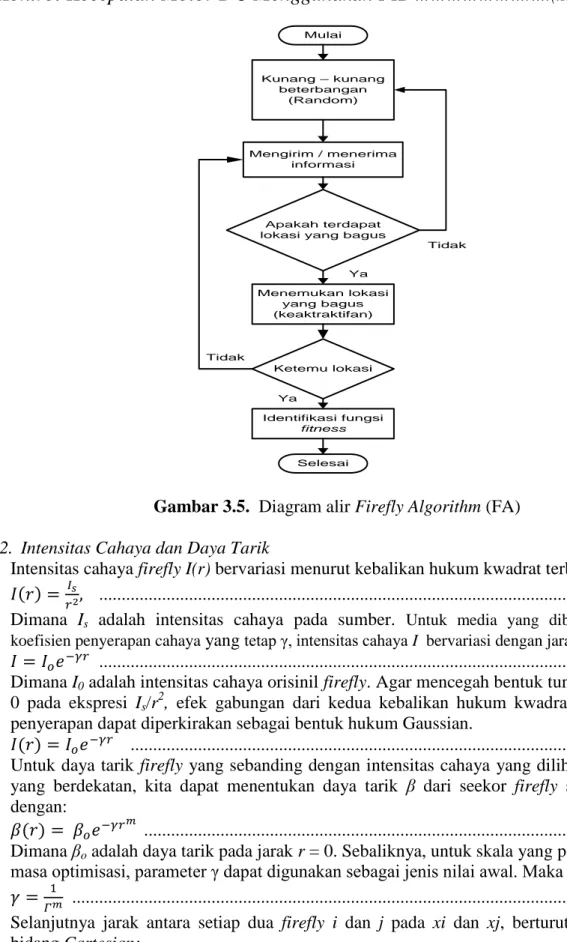
7 Kunang – kunang beterbangan (Random) Mengirim / menerima informasi Apakah terdapat lokasi yang bagus
Menemukan lokasi yang bagus (keaktraktifan) Ketemu lokasi Identifikasi fungsi fitness Mulai Selesai Tidak Ya Ya Tidak
Gambar 3.5. Diagram alir Firefly Algorithm (FA) C. 2. Intensitas Cahaya dan Daya Tarik
Intensitas cahaya firefly I(r) bervariasi menurut kebalikan hukum kwadrat terbalik. 𝐼(𝑟) = 𝐼𝑠
𝑟2, ... (3.8)
Dimana Is adalah intensitas cahaya pada sumber. Untuk media yang diberikan dengan koefisien penyerapan cahaya yang tetap γ, intensitas cahaya I bervariasi dengan jarak r. Maka : 𝐼 = 𝐼𝑜𝑒−𝛾𝑟 ... (3.9)
Dimana I0 adalah intensitas cahaya orisinil firefly. Agar mencegah bentuk tunggal pada r =
0 pada ekspresi Is/r2, efek gabungan dari kedua kebalikan hukum kwadrat terbalik dan
penyerapan dapat diperkirakan sebagai bentuk hukum Gaussian.
𝐼(𝑟) = 𝐼𝑜𝑒−𝛾𝑟 ... (3.10)
Untuk daya tarik firefly yang sebanding dengan intensitas cahaya yang dilihat oleh firefly yang berdekatan, kita dapat menentukan daya tarik β dari seekor firefly sesuai jarak r dengan:
𝛽(𝑟) = 𝛽𝑜𝑒−𝛾𝑟𝑚 ... (3.11) Dimana βo adalah daya tarik pada jarak r = 0. Sebaliknya, untuk skala yang panjang 𝛤 pada
masa optimisasi, parameter γ dapat digunakan sebagai jenis nilai awal. Maka : 𝛾 = 1
𝛤𝑚 ... (3.12)
Selanjutnya jarak antara setiap dua firefly i dan j pada xi dan xj, berturut – turut pada bidang Cartesian:
8
𝑟𝑖𝑗‖𝑥𝑖 − 𝑥𝑗‖ = √∑𝑑𝑘=1(𝑥𝑖,𝑘− 𝑥𝑗,𝑘)2,... (3.13) Pergerakan dari seekor kunang – kunang i menarik kunang – kunang yang lain (terang) yang ditentukan oleh
𝑥𝑖 = 𝑥𝑖 + 𝛽𝑜𝑒−𝛾𝑟𝑖𝑗2(𝑥
𝑗 − 𝑥𝑖) + 𝛼 ∈𝑖 , ... (3.14)
Keterangan :
xi : Koordinasi spasial firefly ke-i xj : Koordinasi spasial firefly ke-j
𝛼 : Parameter pengacakan
∈𝑖 : Nilai vektor dari nilai acak antara [0-1]
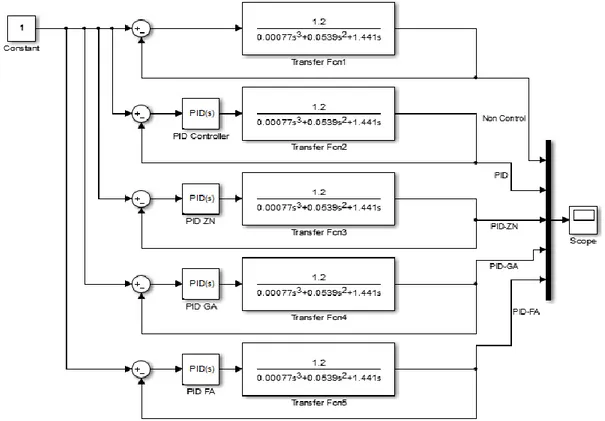
4. ANALISA DAN PEMBAHASAN
Dengan menggunakan simulink dari matlab dapat digambarkan sistem kontrol kecepatan Motor DC berbagai bentuk model. Yaitu kecepatan motor DC tanpa controller, dengan kontrol konvensional (Ziegler-Nichols), dengan PID standart, PID yang dituning dengan Genetic Algorithm (GA) dan Firefly Algorithm (FA). Gambar 4.1. menunjukkan Motor DC tanpa kontrol, dengan PID Ziegler-Nichols, Kontrol PID standart, Kontrol PID tunning GA dan Kontrol PID tuning FA
Tunning Ziegler_Nicols didapatkan Critikal gain Ku = 84 dan Kritikal periode Tu = 0,15 detik dan PID controller dapat dilihat pada gambar 3.3. dimana Kp = 49,41, ki = 0,075 dan Kd = 0,01875
9
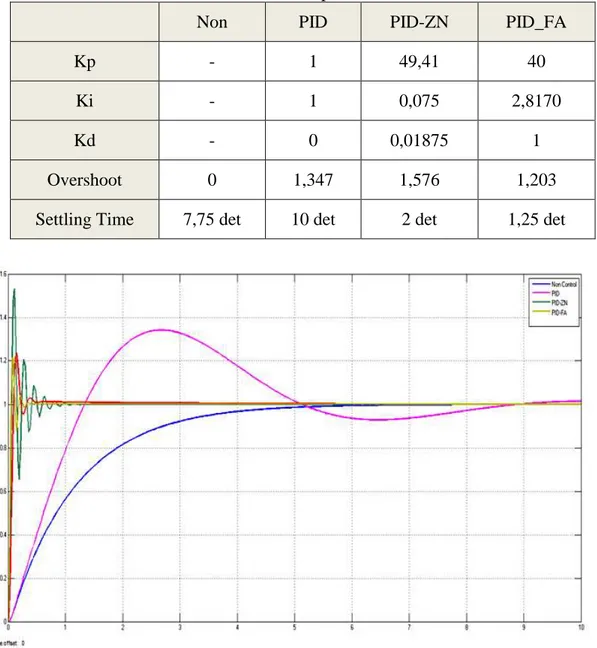
Dari hasil running program didapatkan nilai Kp, Ki dan Kd dari masing-masing kontroler seperti pada table 4.1. dengan gambar respon seperti pada gambar 4.2. dibawah ini:
Tabel 4.1. Nilai Kp, Kd dan Ki
Non PID PID-ZN PID_FA
Kp - 1 49,41 40
Ki - 1 0,075 2,8170
Kd - 0 0,01875 1
Overshoot 0 1,347 1,576 1,203
Settling Time 7,75 det 10 det 2 det 1,25 det
Gambar 4.2. respon berbagai model kontrol
Hasil running program didapatkan nilai; overshoot tanpa kontrol 0 dengan settling time 7,75 detik, overshoot PID standart 1,347 dengan settling time 10 detik, overshoot PID-ZN 1,576 dengan settling time 2 detik, overshoot PID-GA 1,232 dengan settling time 1,85 detik, overshoot PID-FA 1,203 dengan settling time 1,25 detik.
10 5. KESIMPULAN
Dari hasil analisis dan pembahasan pada penelitian maka didapat kesimpulan sebagai berikut: Sistem kontrol kecapatan motor DC yang dianggap paling baik adalah kontrol PID_FA, kemudian PID-GA, kemudian PID-ZN, kemudian PID dan terakhir Nonkontrol. Hasil running program didapatkan nilai; overshoot tanpa kontrol 0 dengan settling time 7,75 detik, overshoot PID standart 1,347 dengan settling time 10 detik, overshoot PID-ZN 1,576 dengan settling time 2 detik, overshoot GA 1,232 dengan settling time 3,35 detik, overshoot PID-FA 1,203 dengan settling time 1,25 detik.
6. DAFTAR PUSTAKA
J. Bates and M.E. Elbuluk and D.S. Zinger, "Neural Network Control of a Chopper Fed DC
Motor, 24th Annual IEEE 20-24 June 1993, pp. 893-899.
K Ogata, Modern Control Systems, University of Minnesota, Prentice Hall, 1987.
M. Azizur Rahman, Fellow, IEEE, and M. Ashraful Hoque; On-Line Self-Tuning ANN-Based
Speed Control of a PM DC Motor, IEEE/ASME Transactions ON Mechatronics, VOL.
2, NO. 3, September 1997
O. Dwyer,.PI And PID Controller Tuning Rules For Time Delay Process: A Summary. Part 1: PI Controller Tuning Rules.. , Proceedings Of Irish Signals And Systems Conference, June 1999.
Yang, X. S. (2009). "Firefly Algorithms For Multimodal Optimization". Stochastic Algorithms: Foundations and Applications” SAGA 2009. Lecture Notes in Computer Sciences 5792