DETEKSI MANUSIA MENGGUNAKAN
HISTOGRAM OF ORIENTED GRADIENT AND EUCLIDEAN DISTANCE
Indah Agustien Siradjuddin1), Fifin Ayu Mufarroha2), Fitri Damayanti3)
Jurusan Teknik Informatika Fakultas Teknik Universitas Trunojoyo Madura E-Mail: 1)[email protected], 2)[email protected],
3)
Abstrak
Deteksi Manusia bertujuan untuk menentukan posisi obyek dalam suatu citra. Terdapat dua tahapan utama dalam deteksi manusia ini, yaitu ekstraksi fitur dan klasifikasi. Histogram Oriented Gradient digunakan pada tahapan ekstraksi fitur. Pada metode ini, fitur Histogram Oriented Gradient dihasilkan pada setiap kandidat obyek. Fitur-fitur inilah yang akan digunakan pada tahapan selanjutnya yaitu klasifikasi. Tahapan klasifikasi ini bertujuan untuk menentukan apakah kandidat obyek merupakan target obyek yang diinginkan. Metode Euclidian distance digunakan pada tahap terakhir ini. Dari ujicoba yang dilakukan, didapatkan tingkat akurasi rata-rata adalah 80,55%.
Kata kunci : Deteksi, fitur, Human Detection, Histogram of Oriented Gradient, Euclidean Distance
Pendahuluan
Deteksi manusia adalah langkah awal untuk beberapa aplikasi, seperti video pengintaian yang pintar, sistem asistensi mengemudi, dan manajemen konten digital yang cerdas. Sekarang ini kamera pengintai sudah banyak digunakan di beberapa area misalnya di bank-bank, swalayan, bandara udara dan tempat parkir. Tujuan dari video pengamatan pintar adalah untuk menganalisa data video secara real time dan memberikan peringatan kepada pihak keamanan ketika terjadi tindak kejahatan misalnya pencurian.
Pada gambar tunggal, pendeteksi manusia yang ideal seharusnya mampu mengidentifikasi dan menemukan semua manusia yang ada dengan mempertimbangkan posisi, skala ataupun pose. Tetapi, karena artikulasi dari tubuh manusia, akan sangat susah untuk mendeteksi manusia pada semua pose dan sudut pandang.
Pada penelitian ini diimplementasikansistem deteksi manusia menggunakan Histogram Of Oriented Gradient sebagai metode pembuatan histogram dari orientasi nilai gradien yang menghasilkan ekstraksi fitur selanjutnya dilakukan perhitungan klasifikasi dengan menggunakan metode Euclidean Distance.
Histogram Of Oriented Gradient
Deteksi manusia dalam penelitian ini, terdapat dua tahapan utama yaitu ekstraksi fitur dengan menggunakan Histogram of Oriented Gradient dan klasifkasi dengan menggunakan metode euclidian distance.
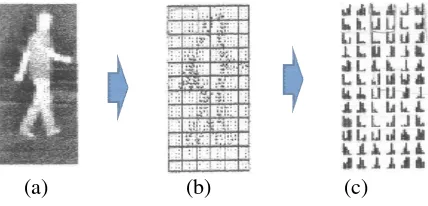
Histogram of Oriented Gradient (HOG) adalah ekstraksi fitur yang didasarkan pada evaluasi histogram dari orientasi citra gradien (Dalal, 2005). Ide dasarnya adalah bahwa tampilan objek dapat dicirikan dengan cukup baik oleh distribusi intensitas gradien atau arah tepi. Berbeda dengan proses pembuatan histogram citra yang menggunakan nilai-nilai intensitas pixel dari suatu citra atau bagian tertentu dari citra untuk pembuatan histogramnya. Secara umum ilustrasi metode HOG dapat dilihat pada Gambar 1.
(a) (b) (c)
Gambar 1. Ilustrasi Metode HOG
Tahapan – tahapan dari ekstraksi fitur menggunakan HOG dapat dilihat pada Gambar 2.
Gambar 2. Ekstraksi Fitur dengan menggunakan HOG
Berikut tahapan-tahapan proses ekstraksi fitur dengan menggunakan metode HOG
a. Perhitungan Gradien
Perhitungan Gradien diperlukan untuk membentuk fitur HOG. Citra masukan ditransformasikan terlebih dahulu menjadi citra Gradien. Untuk proses transformasi tersebut, digunakanlah Persamaan (1), (2), (3), (4), dan (5).
f , f’ : Gaussian dan Gaussian derivative nk : Ukuran matriks kernel
σ : Standar deviasi
epsilon : Nilai yang sangat kecil sekali
Contoh transformasi citra masukan menjadi citra Gradien dapat dilihat pada Gambar 3.
Gambar 3.Transformasi citra masukan (kiri) menjadi citra gradient (kanan)
b. Histogram Bin Orientasi
Gradien pada citra gradien yang dihasilkan pada tahap pertama, digunakan untuk pembentukan histogram masing-masing orientasi pada citra gradien. Bin orientasi menyatakan jumlah bin orientasi yang akan digunakan dalam pembuatan histogram dalam setiap sel, dengan menggunakan persamaan (6) dan (7)(Laptev, 2006). Dalam penelitian ini, jumlah bin orientasi yang digunakan adalah empat.
(6)
Perhitungan Histogram masing-masing bin orientasi ini dilakukan secara lokal yaitu perblok dari suatu citra masukan. Karena nilai gradien mempunyai nilai yang berbeda oleh karena itu diperlukan pengelompokkan cell menjadi lebih besar atau yang disebut dengan blok. Blok biasanya overlap atau tumpang tindih karena setiap cell kontribusi nilainya lebih dari sekali. Dalam proses normalisasi blok yang tumpang tindih diselesaikan dengan R-HOG. Dalam blok terdiri dari 2x2 sel, dalam detector window terdapat 7x15 R-HOG dan menggunakan 4 bin orientasi sehingga dari ketiga parameter nilai magnitud, nilai hasil filtering, dan radian dapat ditentukan jumlah vektor yaitu 2x2x7x15x4 yang hasilnya adalah 1680 vektor dalam 1 detector window yang disebut dengan fitur (Zhu, 2006).
Euclidean Distance
Tahap kedua dari sistem deteksi manusia yang diimplementasikan pada penelitian ini adalah tahapan klasifikasi dengan menggunakan metode euclidian distance. Tahapan ini bertujuan untuk menentukan apakah obyek yang terdeteksi adalah manusia atau bukan. Dalam matematika, euclidean distance atau adalah jarak antara dua titik yang dapat diukur dan dihasilkan oleh formula pytagoras. Euclidean vector atau sering hanya disebut dengan vector adalah objek geometri yang memiliki panjang (magnitude) dan arah (direction). Sedangkan ruang vektor adalah sebuah struktur matematika yang dibentuk oleh sekumpulan vektor. Euclidean distance merupakan teknik yang paling sederhana untuk menghitung jarak diantara 2 vektor(Yildiz, 2005). Misalkan diberikan dua buah feature vector X dan Y, maka jarak diantara dua feature vector X dan Y ditunjukkan pada persamaan (8) .
( , ) = ( − ) + ( − ) + ⋯ + ( − )
= ∑ ( − ) (8) dimana :
d = ukuran jarak antara query gambar yang ada di dalam database. X = feature vector pada image X
Y = feature vector pada image Y
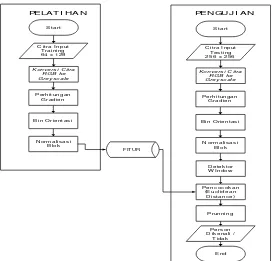
Metodologi Penelitian
C it ra Inp ut T ra ining 64 x 128 S tart
K onv e rs i C itra R G B k e G rey s c a le
P erhit ung an G radien
B in Orient as i
N orm alis as i B lok
C it ra I nput T es t ing 256 x 256 S t art
K o nv ers i C it ra R GB k e G rey s c ale
P e rhit ungan G rad ien
B in O rien tas i
N orm a lis as i B lok
D e tek tor W I ndow
P e nc oc ok an (E uc lide an
D is tan c e)
P ers on D ik enali /
T idak
E nd P running
PELA T I HA N PEN GUJ I A N
FITUR
Gambar 4. Desain Sistem Secara Umum
Gambar 5. Contoh Data pelatihan positif dan negatif
Hasil dan Pembahasan
Uji coba yang digunakan dalam sistem ini adalah 100 data pelatihan dan 100 data uji coba. Data pelatihan meliputi 50 citra positif dan 50 citra negatif dengan ukuran 64x128 piksel, sedangkan untuk citra uji coba berupa 100 citra dengan ukuran masing – masing 256x256 piksel. Skenario uji coba pada penelitian ini, antara lain
Skenario 1
a. Data pelatihan citra positif sebanyak 25 citra dan data uji coba sebanyak 100 citra. b. Data pelatihan citra negatif sebanyak 25 citra dan data uji coba sebanyak 100 citra. c. Dengan Threshold masing - masing 2,3,4, dan 5
Skenario 2
a. Data pelatihan citra positif sebanyak 50 citra dan data uji coba sebanyak 100 citra. b. Data pelatihan citra negatif sebanyak 50 citra dan data uji coba sebanyak 100 citra. c. Dengan Threshold masing – masing 2,3,4, dan 5
terdeteksi bukanlah manusia, atau ketika ada obyek manusia, tetapi sistem tidak dapat mendeteksinya.
Setelah dilakukan uji coba dengan menggunakan scenario 1 dan 2, didapatkan hasil uji coba yang ditunjukan pada tabel 1.
Tabel 1. Hasil Akurasi Uji Coba
Skenario Threshold Data
Pelatihan Akurasi
1 2 50 80,83%
3 50 80,56%
4 50 80,80%
5 50 80,16%
2 2 100 80,47%
3 100 80,39%
4 100 80,40%
5 100 80,73%
Uji coba pada skenario 1 merupakan uji coba dengan menggunakan total data pelatihan sebesar 50 pada threshold 2,3,4, dan 5. Pada sistem deteksi ini mengalami peningkatan dan penurunan yang tidak signifikan. Uji coba skenario 2 merupakan uji coba dengan menggunakan total data pelatihan sebesar 100 pada threshold 2,3,4, dan 5. Sama halnya dengan uji coba pada skenario 1, uji coba pada skenario 2 pada sistem deteksi ini mengalami peningkatan dan penurunan yang tidak signifikan. Gambar 6 dan Gambar 7 merupakan hasil uji coba skenario 1 dan skenario2.
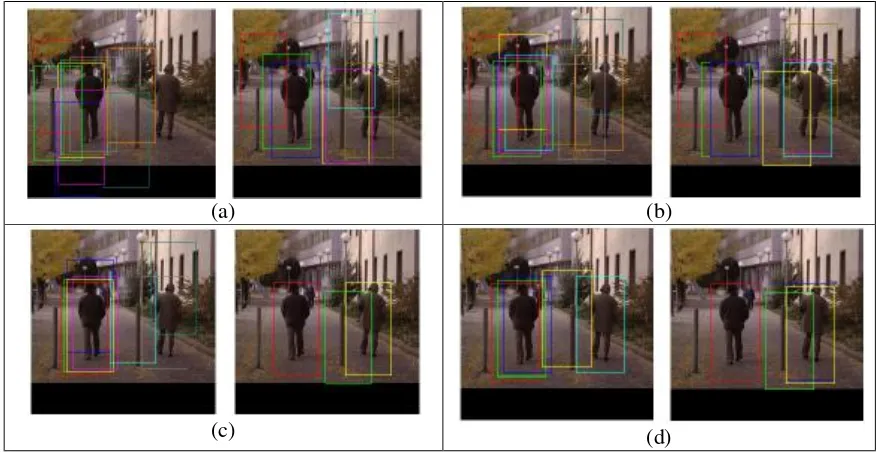
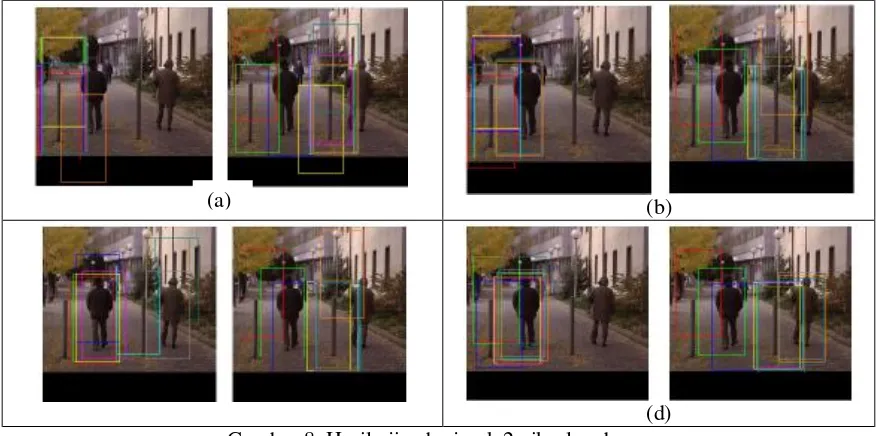
Hasil uji coba pada kedua skenario dapat dilihat bahwa keempat threshold tersebut belum signifikan karena perpindahan pada 8 piksel atau step detektor window masih belum menunjukkan perbedaan. Jika melakukan perpindahan dengan menggunakan 2 piksel dan 4 piksel maka hasil detektor windownya akan berbeda pula. Gambar 8 dan Gambar 6 merupakan hasil uji coba dengan menggunakan jarak step detektor window pada 2 piksel dan 4 piksel dengan threshold 2,3,4, dan 5 skenario 1 dan skenario 2.
(a) (b)
(c) (d)
Gambar 6. Hasil uji coba jarak 4 piksel pada
Gambar 7. (a) Citra Uji (b) Citra hasil Uji Coba pada skenario 1
(b)
(d) Gambar 8. Hasil uji coba jarak 2 piksel pada
(a) Threshold 2 (b) Threshold 3 (c) Threshold 4 (d) Threshold 5
Gambar 9. (a) Citra Uji (b) Citra Hasil Uji Coba Pada Skenario 2 (a)
(a)
(b) (a)
Hasil uji coba pada Gambar 6, Gambar 7, Gambar 8, dan Gambar 9 dapat dilihat perbedaan dengan menggunakan jarak step detektor window 2 piksel, 4 piksel dan 8 piksel. Dari perbedaan itu dapat dianalisa bahwa semakin kecil jarak step detektor window dan semakin bertambahnya thershold , maka jumlah detektor dalam citra terlihat banyak. Hal ini menunjukkan bahwa dalam jarak 2 piksel dan 4 piksel banyak mendeteksi manusia akan tetapi pada 8 piksel jumlah detektor pada threshold 5 dalam citra sangat sedikit karena jumlah detektor pada grup juga sedikit.
Hasil uji coba juga menunjukkan bahwa perbedaan jumlah data training tidak mempengaruhi hasil akurasi, karena metode yang digunakan yaitu euclidean distance. Dimana metode ini tidak ada pembelajaran terlebih dahulu untuk fiturnya akan tetapi langsung di cari jarak terdekat antara citra uji dan fitur – fitur pada citra training.
KESIMPULAN
Hasil ujicoba dari berbagai skenario, didapatkan bahwa rata-rata tingkat akurasi mencapai 80,55 %. Dengan menggunakan metode klasifikasi yang sederhana, yaitu euclidian distance, metode Histogram Oriented Gradient dapat menghasilkan tingkat akurasi deteksi yang cukup tinggi. Metode ekstraksi fitur ini cukup menjanjikan jika dikombinasikan dengan metode klasifikasi yang lebih kompleks.
Ucapan Terima Kasih
Penelitian ini dibiayai oleh DIKTI dalam Penelitian Hibang Bersaing Tahun 2012.
Daftar Pustaka
Dalal, N and Triggs, B., 2005. “Histogram of oriented Gradient for Human Detection”. Proceeding Conference on Computer Vision and Pattern Recognition. 886–893.
Gonz’alez, J., 2004. Boosting Histogram of Oriented Gradient for Human Detection. Spain : Universitas Aut’onoma de Barcelona.
Laptev, I ., 2006. “Improvements of object detection using boosted histograms”. Proceeding British Machine Vision Conference. 27 : 535–544.
Yildiz, C., 2005 . An Implementation on Histogram of Oriented Gradients for Human Detection. Turkey : Bilkent University.