DETEKSI PEDESTRIAN MENGGUNAKAN METODE
HISTOGRAM OF ORIENTED GRADIENTS PADA LIBRARY EMGU CV
SKRIPSI
Disusun oleh :
KANTI PUTRI RAHAYU
NPM. 0934010220
JURUSAN TEKNIK INFORMATIKA
FAKULTAS TEKNOLOGI INDUSTRI
UNIVERSITAS PEMBANGUNAN NASIONAL " VETERAN"
JAWA TIMUR
DETEKSI PEDESTRIAN MENGGUNAKAN METODE
HISTOGRAM OF ORIENTED GRADIENTS PADA LIBRARY EMGU CV
SKRIPSI
Diajukan Untuk Memenuhi Sebagai Persyaratan Dalam Memperoleh Gelar Sarjana Komputer
Jurusan Teknik Informatika
Disusun oleh :
KANTI PUTRI RAHAYU
NPM. 0934010220
JURUSAN TEKNIK INFORMATIKA
FAKULTAS TEKNOLOGI INDUSTRI
UNIVERSITAS PEMBANGUNAN NASIONAL “ VETERAN”
JAWA TIMUR
LEMBAR PENGESAHAN
DETEKSI PEDESTRIAN MENGGUNAKAN METODE
HISTOGRAM OF ORIENTED GRADIENTS PADA LIBRARY
EMGU CV
Disusun Oleh :
KANTI PUTRI RAHAYU
NPM. 0934010220
Telah disetujui untuk mengikuti Ujian Negara Lisan Gelombang IV Tahun Akademik 2012/2013
Dosen Pembimbing
Basuki Rahmat, S.Si, MT NPTY. 3 6907 06 0209 1
Mengetahui,
Ketua Jurusan Teknik Informatika Fakultas Teknologi Industri
UPN ” Veteran” Jawa Timur
SKRIPSI
DETEKSI PEDESTRIAN MENGGUNAKAN METODE
HISTOGRAM OF ORIENTED GRADIENTS PADA LIBRARY EMGU CV
Mengetahui,
Dekan Fakultas Teknologi Industri
Universitas Pembangunan Nasional ” Veteran” Jawa Timur Disusun Oleh :
KANTI PUTRI RAHAYU NPM. 0934010220
Telah dipertahankan di hadapan dan diterima oleh Tim Penguji Skripsi Jurusan Teknik Informatika Fakultas Teknologi Industri
Universitas Pembangunan Nasional ” Veteran” Jawa Timur Pada Tanggal 14 Juni 2013
Dosen Pembimbing : Tim Penguji :
1.
Basuki Rahmat, S.Si, MT Ir. Mu’tasim Billah, MS
Penyusun menyadari bahwa dalam menyelesaikan Tugas Akhir ini banyak mendapatkan bantuan dan dukungan dari berbagai pihak, untuk itu pada kesempatan yang berharga ini penyusun ingin mengucapkan terima kasih kepada : 1. Allah SWT, karena berkat Rahmat dan berkahNya kami dapat menyusun dan
menyelesaikan Laporan Skripsi ini hingga selesai.
2. Kedua orang tua dan keluarga penyusun. Terima kasih atas semua do’a dan dukungannya sehingga penyusun dapat menyelesaikan Tugas akhir ini.
3. Bapak Prof. Dr. Ir. Teguh Soedarto, MP selaku Rektor Universitas Pembangunan Nasional “Veteran” Jawa Timur.
4. Bapak Ir. Sutiyono, MT selaku Dekan Fakultas Teknologi Industri Universitas Pembangunan Nasional “Veteran” Jawa Timur.
5. Ibu Dr. Ir. Ni Ketut Sari, MT selaku Ketua Jurusan Teknik Informatika Universitas Pembangunan Nasional “Veteran” Jawa Timur.
6. Bapak Frinda Wahyu, S.Kom selaku PIA Tugas Akhir Informatika Universitas Pembangunan Nasional “Veteran” Jawa Timur.
7. Bapak Basuki Rahmat, S.Si, MT selaku Dosen Pembimbing, yang telah meluangkan waktu dan sabar dalam memberikan arahan, motivasi, dan solusi yang tepat sehingga penyusun dapat menyelesaikan Tugas Akhir ini.
9. Ryan Raynaldi, yang selalu setia menemani, mendengarkan keluh kesah dan membantu penyusun agar dapat menyelesaikan Tugas Akhirnya.
10.Mas Rully Gita Hartantyo, yang selalu menemani dan menyumbangkan ide serta tak bosan-bosan memberikan motivasi untuk penyusun.
11.Mas Aries Santoso yang rela meminjamkan kamera untuk pengambilan objek 12.Para Sahabatku Firna Anas Oktania, Asep Kurnaivi Wardana, dan Siska
Devitri Wahyumin yang selalu menemani, menyumbangkan saran kritiknya dan tak bosan – bosan selalu memberi support kepada penyusun.
13.Untuk HIMATIFA yang membantu penyusun dengan suka rela untuk menjadi objek penelitian Tugas Akhir ini
14.Warga Informatic Dhe dan teman-teman seperjuangan angkatan 2009 atas kebersamaan yang indah ini.
Segala puji syukur alhamdulilah penyusun panjatkan kehadirat Allah SWT atas segala limpahan rahmat dan hidayahNya sehingga penyusun dapat menyelesaikan Tugas Akhir yang berjudul ”Deteksi Pedestrian Menggunakan Metode Histogram of Oriented Gradient Pada Library EMGU.CV” ini dengan tepat waktu.
Penulisan Tugas Akhir ini disusun sebagai salah satu syarat untuk menyelesaikan program Strata Satu (S1) pada jurusan Teknik Informatika, Fakultas Teknologi Industri, UPN ”Veteran” Jawa Timur. Walaupun banyak kesulitan yang harus dihadapi penyusun dalam menyelesaikan Tugas Akhir ini, namun berkat bantuan dan dorongan dari berbagai pihak, akhirnya Tugas Akhir ini dapat terselesaikan dengan baik.
Akhir kata, penyusun menyadari bahwa Tugas Akhir ini masih jauh dari sempurna, tak lebih karena berbagai keterbatasan yang dimiliki penyusun. Oleh karena itu penyusun mengharapkan kritik dan saran yanga bersifat membangun dari para pembaca untuk pengembangan aplikasi lebih lanjut.
Surabaya, Mei 2013
LEMBAR PENGESAHAN
2.5.2. Histogram of Oriented Gradients (HOG) ... 11
2.5.3. Visual Basic(.net) ... 21
2.5.4. EMGU.CV ... 23
BAB III ANALISIS DAN PERANCANGAN SISTEM ... 25
3.1 Kebutuhan Hardware dan Software ... 25
3.2 Rancangan Percobaan Penelitian ... 25
3.2.1. Proses Pengambilan Objek Gambar ... 27
3.2.2. Proses Histogram of Oriented Gradients ... 28
3.2.3. Proses Cropping dan Save ... 29
3.3 Perancangan Interface ... 30
3.3.1 Interface Tampilan Awal ... 30
3.3.2 Interface View ... 31
3.3.3 Interface Profil ... 31
BAB IV IMPLEMENTASI ... 32
4.1 Implementasi Data ... 32
4.2 Implementasi Interface ... 32
4.3 Implementasi Proses ... 38
4.3.1 Proses Load ... 44
4.3.2 Proses Pada Button Procces Pedestrian ... 44
4.3.3Proses Menampilkan Panel ... 45
4.3.4. Proses Menampilkan Profile ... 46
4.4 Uji Coba Program ……… 47
4.5.2 Pelaksanaan Uji Coba ... 48
4.5 Analisa Aplikasi ... 52
4.6.1 Analisis Proses Histogram Of Oriented Gradients... 52
BAB V Kesimpulan Dan Sar an ... 64
5.1. Kesimpulan ... 64
5.2. Saran ... 65
PENYUSUN : KANTI PUTRI RAHAYU DOSEN PEMBIMBING : BASUKI RAHMAT S.Si, MT
ABSTRAK
Deteksi Pedestrian merupakan suatu teknologi yang sangat membantu dalam berbagai bidang. Dalam bidang lalulintas seperti halnya pada pengereman otomatis pada mobil ketika ada pedestrian lewat. Selain itu, deteksi pedestrian juga dapat digunakan pada kepadatan pedestrian menyebrang di pasar, mall dan lain-lain untuk menghitung jumlah manusia. Bebagai metode dikembangkan untuk memaksimalkan hasil deteksi.
Salah satu metode yang dibahas dalam tugas akhir ini adalah metode
Histogram of Oriented Gradient (HOG) yang digunakan untuk mendeteksi pedestrian pada citra statis dan kecepatan terdeteksinya. Karakteristik fitur Histogram of Oriented Gradients dari sebuah pedestrian ditunjukkan oleh
distribusi gradiennya. hasil fitur HOG menggunakan Support Vector Machine (SVM) untuk menghasilkan sebuah model yang digunakan sebagai acuan deteksi.
Oleh sebab itu tujuan tugas akhir ini untuk merancang dan membuat aplikasi pendeteksi obyek pejalan kaki (pedestrian) dengan menggunakan metode
Histogram of Oriented Gradients (HOG) pada library EMGU CV. Dengan
manfaatnya Sebagai dasar sistem untuk lampu lalu lintas, pengereman otomatis pada mobil ketika ada pedestrian yang berjalan, dapat mendeteksi pedestrian yang ada pada jembatan penyebrangan, dan lain-lain. Serta aplikasi deteksi ini berguna untuk mendeteksi pedestrian dengan tingkat akurasi dalam pengujiannya
Dari hasil uji coba yang telah dilakukan dengan metode ini pengambilan objek pedestrian terbaik terdapat pada jarak 5 meter , serta metode ini tidak dapat menghitung apabila terjadi overlap (tumpukan), dan akurasi keberhasilan metode ini 86,67% dan akurasi kesalahan dengan metode ini 13,33%.
PENDAHULUAN
1.1. Latar Belakang
Kemampuan untuk mendeteksi pedestrian sangatlah menarik dan bermanfaat dalam kehidupan sehari-hari seperti contoh dalam bidang keamanan, deteksi ini dapat diaplikasikan pada kamera cctv untuk mengawasi suatu ruang atau daerah tertentu, atau dalam bidang otomotif sebagai driver-otomatis pada sistem bantuan dalam kendaraan.
Pada saat yang sama pula pedestrian merupakan salah satu objek yang paling menantang untuk dilakukan deteksi, banyaknya variabilitas dalam segi tampilan di lokal atau global yang disebabkan oleh berbagai jenis dan gaya pakaian, sehingga hanya beberapa daerah lokal yang benar-benar khas untuk semua kategori. Selain itu secara global, macam dari aksesoris yang digunakan sangat variatif seperti tas, penghangat leher, topi, dan lain-lain yang dapat menggangu pembentukan siluet bayangan. Perihal diatas menambah kesulitan pada proses deteksi pedestrian dan akhirnya banyak orang yang diidentifikasi sebagai gambar yang sama pada satu daerah deteksi.
Salah satu metode yang digunakan untuk mendeteksi pedestrian pada tugas akhir ini adalah Histogram of Oriented Gradient (HOG), dimana prinsip
Histogram of Oriented Gradients adalah menghitung nilai gradien pada suatu
image . Image dibagi menjadi beberapa daerah kecil yang disebut cell. kumpulan
dari beberapa cell membentuk sebuah block. Masing-masing cell akan ditentukan besarnya nilai gradiennya. Secara keseluruhan akan dihasilkan suatu karakteritik
image yang ditunjukkan oleh distribusi gradien image tersebut. Untuk
pengklasifikasiannya, feature Histogram of Oriented Gradients dengan menggunakan SVM (Support Vector Machine) untuk menghasilkan sebuah model yang akan dipakai sebagai acuan untuk menentukan sebuah obyek yang dideteksi, apakah obyek tersebut termasuk pedestrian atau non pedestrian. (Dalal Triggs : 2006)
Metode Histogram of Oriented Gradients merupakan salah satu metode yang berada di library Emgu CV. Library Emgu CV sendiri merupakan wrapper dari
Library Open.cv yang khusus berjalan di bahasa pemgroman berbasis .net
contohnya seperti C #, VB .net, VC + +, IronPython, dan lain-lain. (Seo, N, 2007) Oleh karena itu, dalam tugas akhir ini diusulkan pembuatan sistem deteksi obyek pedestrian (pejalan kaki) menggunakan metode Histogram of Oriented
Gradients (HOG) untuk mengetahui mana yang pedestrian atau non pedestrian
otomatis akan tersimpan pada folder hasil pada komputer
1.2. Rumusan Masalah
Berdasarkan beberapa uraian latar belakang di atas maka dapat dirumuskan masalah, yaitu :
1. Menerapkan cara untuk mengetahui objek pedestrian dengan objek yang lain.
2. Menerapkan metode Histogram of Oriented Gradients kedalam pembuatan aplikasi deteksi pedestrian.
3. Menerapkan library Emgu CV dalam Aplikasi deteksi pedestrian.
1.3. Batasan Masalah
Adapun batasan-batasan masalah yang dibuat agar dalam pengerjaan tugas akhir ini dapat berjalan degan baik adalah sebagai berikut :
1. Obyek yang diidentifikasi berada dalam intesitas cahaya yang stabil 2. Mendeteksi citra pejalan kaki yang dilihat dari sisi samping.
3. Perangkat yang digunakan dalam skripsi ini adalah Visual Basic.Net 2010 dan library Emgu CV.
4. Tidak menggunakan database, hanya menggunakan data file untuk menyimpan gambar pada folder komputer.
5. Gambar berformat JPG atau JPEG.
6. Aplikasi ini hanya dapat meload gambar, melokalisasi gambar
1.4. Tujuan
Dari rumusan masalah di atas, maka tujuan dari penulisan tugas akhir ini adalah merancang dan membuat aplikasi pendeteksi obyek pejalan kaki (pedestrian) dengan menggunakan metode Histogram of Oriented Gradients (HOG) pada library Emgu CV.
1.5. Manfaat
Manfaat dari penulisan tugas akhir ini adalah :
1. Sebagai dasar sistem untuk lampu lalu lintas, pengereman otomatis pada mobil ketika ada pedestrian yang berjalan, dapat mendeteksi
pedestrian yang ada pada jembatan penyebrangan, dan lain-lain.
2. Aplikasi deteksi ini berguna untuk mendeteksi pedestrian dengan tingkat akurasi dalam pengujiannya.
3. Dapat mengetahui secara lebih jelas teknik deteksi pedestrian oleh komputer, dengan menggunakan metode Histogram of Oriented
Gradients.
4. Memanfaatkan tools yang terdapat pada library Emgu CV untuk menunjang proses deteksi pedestrian.
5. Dapat dipergunakan sebagai dasar penelitian selanjutnya untuk deteksi
pedestrian secara otomatis dan dapat dipergunakan untuk berbagai
TINJ AUAN PUSTAKA
2.1. Peneliti Pendahulu
Histogram berorientasi gradien adalah fitur deskriptor yang digunakan
dalam visi komputer dan pengolahan citra untuk tujuan deteksi obyek. Teknik ini menghitung kejadian orientasi gradien dalam porsi lokal dari suatu gambar. Metode ini mirip dengan tepi orientasi histogram, fitur skala invarian mengubah deskripsi, dan bentuk konteks, tetapi berbeda dalam hal itu dihitung pada grid padat sel seragam spasi dan menggunakan tumpang tindih normalisasi kontras lokal untuk meningkatkan akurasi.
Navneet Dalal dan Bill Triggs, peneliti Institut Nasional Perancis dibidang Ilmu Komputer dan Pengendalian (INRIA), pertama kali dijelaskan Histogram deskriptor Gradient Berorientasi pada bulan Juni 2005. Dalam penelitian ini mereka fokus pada masalah deteksi pejalan kaki (pedestrian) di gambar statis, meskipun sejak itu mereka memperluas tes mereka untuk memasukkan deteksi manusia dalam film dan video. (Dalal & Bill : 2005)
Untuk meningkatkan akurasi, histogram lokal dapat menjadi kontras dinormalisasi dengan menghitung ukuran intensitas di seluruh wilayah yang lebih besar dari gambar, yang disebut blok, dan kemudian menggunakan nilai ini untuk menormalkan semua sel dalam blok. Normalisasi ini mengakibatkan invarian baik perubahan pencahayaan atau bayangan. (Dalal & Bill : 2005)
Histogram of Oriented Gradients beroperasi pada sel lokal, metode ini
menjunjung invarian untuk transformasi geometrik dan fotometrik, kecuali untuk orientasi objek.
Perubahan tersebut hanya akan muncul di daerah spasial yang lebih besar. Selain itu, sebagai Dalal dan Triggs ditemukan, pengambilan sampel kasar spasial, pengambilan sampel orientasi baik, dan normalisasi fotometrik lokal yang kuat memungkinkan gerakan tubuh individu pejalan kaki untuk diabaikan selama mereka mempertahankan posisi kira-kira tegak. Histogram of Oriented Gradients
descriptor sehingga sangat cocok untuk deteksi manusia dalam gambar. (Dalal &
Bill : 2005)
2.2. Komputer Vision
Komputer Vision adalah transformasi atau perubahan dari data-data yang
dapat berupa still image (gambar diam) ataupun video kamera menjadi bentuk lain
atau suatu representasi baru dan membantu dalam pengambilan keputusan. Semua
bentuk transformasi yang dilakukan diarsipkan atau disimpan untuk tujuan tertentu.
Input data dapat berasal dari informasi yang berhubungan dengan objek. Pada
representasinya baru dimungkinkan berarti merubah warna dari suatu citra menjadi
citra yang grayscale atau menghilangkan pergerakan kamera dari suatu citra
Manusia seperti halnya mahluk visual yang mudah sekali tertipu dan berfikir
jika tugas komputer vision itu mudah. Seperti halnya otak manusia membagi sinyal
dalam banyak saluran atau channel dimana mengalirkan informasi yang berbeda-beda
kedalam otak. Otak manusia memiliki attention system mengidetifikasi dengan
jalannya sendiri. Setelah diproses akan menghasilkan informasi balik dan akhirnya
berhasil mengartikan visual yang dihasilkan oleh input dari otot kontrol sensor dan
indra lainnya yang memperbolehkan otak untuk mengasosiasikan secara bersilang
segala informasi yang didapat.
Proses ini berulang dengan perangkat keras sensor berupa mata yang
memiliki mekanisme pengontrol cahya (lightning) melalui iris dan melakukan setting
terhadap penerimaan permukaan oleh retina.
Dalam sistem machine vision, suatu komputer menerima kumpulan angka
dari kamera atau tempat penyimpanan disk, dan itulah yang komputer lihat terhadap
suatu citra. Dalam kumpulan angka yang dilihat komputer terdapat noisy yang besar
sehingga memperkecil informasi yang didapat. Sehingga sebelum mengolah image
atau citra perlunya dibuat pengolahan noisy ini agar mendapatkan persepsi yang baik
dari kumpulan angka yang memiliki noisy tersebut. (Taufik Bahri : 2012)
2.3. Citr a (Image)
sebagai :
1. Citra Analog
Menurut Shapiro dan Stockman (2001), citra analog adalah citra yang bersifat kontinu, seperti gambar pada monitor televisi, foto sinar X, foto yang tercetak dikertas foto, lukisan, pemandangan alam, hasil CT scan dan lain sebagainya. Citra analog tidak dapat dipresentasikan dalam komputer sehingga tidak bisa diproses di komputer secara langsung. Oleh sebab itu, agar citra ini dapat diproses di komputer, proses konversi analog ke digital harus dilakukan terlebih dahulu. Citra analog dihasilkan dari alat-alat analog diantaranya adalah video kamera analog, kamera foto analog dan CT scan.
2. Citra Digital
Menurut Shapiro dan Stockman (2001), digital image adalah image 2D yang direpresentasikan oleh array diskrit 2D dari intensitas
sampel, dimana masing-masing titik direpresentasikan dengan ketelitian
terbatas. Digital image juga didefinisikan sebagai representasi dari gambar dua dimensi sebagai himpunan terbatas dari nilai digital yang disebut
picture elements atau pixel. Umumnya pixel disimpan dalam komputer
Gambar .2.1 Citra Analog Dan Citra Digital (Shapiro dan Stockman : 2001)
2.4. Dasar Teori
Pada bab ini akan kami bahas beberapa teori dasar untuk menunjang dalam penyelesaian tugas akhir dalam pembuatan aplikasi deteksi pedestrian menggunakan metode Histogram of Oriented Gradients ini antara lain: pengertian
pedestrian, Histogram of Oriented Gradients, Visual Basic.Net 2010, dan Emgu
CV.
2.5. Pengolahan Citra 2.5.1. Pengertian Pedestrian
Pedestrian berasal dari bahasa Yunani, dimana berasal dari kata pedos
sebagai titik tolak ke tempat lain sebagai tujuan dengan menggunakan moda jalan kaki. Atau secara harfiah, pedestrian berarti “person walking in the street“, yang berarti orang yang berjalan di jalan. (Harln,Twinkle : 1977)
Namun jalur pedestrian dalam konteks perkotaan biasanya dimaksudkan sebagai ruang khusus untuk pejalan kaki yang berfungsi sebagai sarana pencapaian yang dapat melindungi pejalan kaki dari bahaya yang datang dari kendaraan bermotor. Di Indonesia lebih dikenal sebagai trotoar, yang berarti jalur jalan kecil selebar 1,5 sampai 2 meter atau lebih memanjang sepanjang jalan umum.
Berjalan kaki merupakan alat untuk pergerakan internal kota, satu – satunya alat untuk memenuhi kebutuhan interaksi tatap muka yang ada didalam aktivitas komersial dan kultural di lingkungan kehidupan kota. Berjalan kaki merupakan alat penghubung antara moda–moda angkutan yang lain. (John Fruin:1979).
Dilihat dari kecepatannya moda jalan kaki memiliki kelebihan yakni kecepatan rendah sehingga menguntungkan karena dapat mengamati lingkungan sekitar dan mengamati objek secara detail serta mudah menyadari lingkungan sekitarnya. (Amos Rapoport : 1977)
Berjalan kaki merupakan sarana transportasi yang menghubungkan antara fungsi kawasan satu dengan yang lain terutama kawasan perdagangan, kawasan budaya, dan kawasan permukiman dengan berjalan kaki menjadikan suatu kota menjadi lebih manusiawi. (Giovani Gideon: 1977).
perdagangan dimana pejalan kaki memerlukan ruang yang cukup untuk dapat melihat-lihat, sebelum menentukan untuk memasuki salah satu pertokoan di kawasan perdagangan tersebut.
Namun disadari pula bahwa moda ini memiliki keterbatasan juga, karena kurang dapat untuk melakukan perjalanan jarak jauh, peka terhadap gangguan alam, serta hambatan yang diakibatkan oleh lalu lintas kendaraan.
Jalur pedestrian ini juga merupakan elemen penting dalam perancangan kota, karena tidak lagi berorientasi pada keindahan semata, akan tetapi juga pada masalah kenyamanan dengan didukung oleh kegiatan pedagang eceran yang dapat memperkuat kehidupan ruang kota yang ada.
Sistem jalur pedestrian yang baik akan mengurangi keterikatan terhadap kendaraan di kawasan pusat kota, meningkatkan penggunaan pejalan kaki, mempertinggi kualitas lingkungan melalui sistem perancangan yang manusiawi, menciptakan kegiatan pedagang kaki lima yang lebih banyak dan akhirnya akan membantu kualitas udara dikawasan tersebut.
2.5.2. Histogram of Oriented Gradients (HOG)
Histogram of Oriented Gradient (HOG) adalah sebuah metode yang
digunakan dalam image processing untuk tujuan deteksi obyek . Teknik ini menghitung nilai gradien dalam daerah tertentu pada suatu image . Tiap image mempunyai karakteristik yang ditunjukkan oleh distribusi gradien.
Gambar 2.2 Algoritma Histogram of Oriented Gradients (Dalal : 2006). Tahap – tahap merubah citra gambar dengan menggunakan metode
histogram of oriented gradient :
a. Input Gambar : merupakan gambar asli
b. Koreksi Gamma : Merupakan gambar asli yang dikompresi menjadi gambar gamma untuk menjadikan gambar menjadi gelap.
c. Menghitung Gradien Gambar : yakni untuk menghitung kemiringan pada sebuah gambar. Dimana perhitungan ini menggunakan perhitungan operator sobel (Edge Detection) seperti terlihat pada persamaan dibawah ini.
Maks Konvolusinya :
M (x) = [-1 1] (2.1)
M (y) =
− (2.2)
M (x) : Maks konvolusinya (kernel) pada (x)
M (y) : Maks konvolusinya (kernel) pada (y) dari hasil transpose maks (x) Selanjutnya rumus menghitung gradient (x) dan gradient (y) kita membutuhkan maks konvolusinya dengan menggunakan Persamaan (2.1) dan Persamaan (2.2). ditentukan nilainya dalam setiap cell yakni ;
gradient (y). lebih lanjutnya kita membahas tentang perhitungan mencari
Untuk perhitungannya kita membuat blok terlebih dahulu sesuai dengan jumlah maks konvolusinya 1 x 2 dengan arah vertikal kemudian hitung dengan menggunakan rumus pada persamaan (2.3) terlihat pada perhitungan dibawah ini. sama untuk mendapatkan nilai gradient (x). Setelah menghitung nilai
gradient (x) maka langkah selanjutnya kita menghitung nilai gradient (y)
dengan menggunakan Persamaan (2.4).
Untuk menghitung gradient (y) sama seperti menghitung
gradient(x) hanya saja pada perhitungan gradient (y) dengan arah
horisontal terlihat pada gambar dibawah ini.
1 1 1 1 1
1 1 1 0 0
1 1 0 0 0
1 1 0 0 0
Kemudian kita dapat menghitung gradient (y) sesuai dengan rumus persamaan (2.4) terlihat seperti perhitungan dibawah ini.
Baris 1 Kolom 1 G (y) = 1 sama sehingga mendapatkan hasil seperti pada kolom dibawah ini.
Gradient (X) Gradient (Y)
sedangkan (y) bernilai -1 (negatif positif ) maka arah gradiennya akan mengalami kemiringan seperti pada kolom dibawah ini.
* * * * *
* * *
* * * *
* * * *
* * * *
Setelah menemukan gradient (x), gradient (y), dan arah gradiennya maka langkah selanjutnya menghitung kekuatan tepi (magnitude) dengan Persamaan (2.5) dan sudut gradien dengan Persamaan (2.6).
[ ( , ) ] = | Gx| + |Gy| (2.5)
Keterangan :
G [f(x,y)] : Magnitude (kekuatan tepi) Gx : Gradient (x)
Gy : Gradient (y)
Dengan rumus persamaan (2.5) maka kita dapat menghitung kekuatan tepi pada setiap cell seperti pada perhitungan dibawah ini.
0 0 0 0 *
0 0 0 0 *
0 0 2 0 *
0 2 0 0 *
0 2 0 0 *
Setelah menghitung kekuatan tepi (magnitude) gradient maka kita dapat menghitung sudut tepi gradient dengan menggunakan rumus pada persamaan (2.6).
0° 0° 0° 0° *
0° 0° 0° 0° *
0° 0° -45° 0° * 0° -45° 0° 0° * 0° -45° 0° 0° *
Setelah kita mengetahui sudut derajatnya maka kita dapat menentukan arah sudutnya. Arah sudut inilah yang nantinya akan
Langkah selanjutnya membuat keputusan apakah suatu piksel merupakan tepi atau bukan tepi dinyatakan dengan operasi pengambangan
sesuai dengan Persamaan (2.7)
( , ) = ,
, [ ( , ) ]≥ (2.7)
Untuk menentukan apakah suatu piksel merupakan tepi atau bukan
tepi maka kita dapat mengetahuinya dengan perhitungan hasil kekuatan tepi
0 0 0 0 *
0 0 0 0 *
0 2 0 0 *
0 2 0 0 *
Titik Ambang
Nilai 2 termasuk titik ambang yang digunakan untuk Threshold (T) dengan
menggunakan titik ambang ini maka dapat ditentukan jika nilai setiap cell
lebih besar dari threshold (2) atau sama maka tepi dinyatakan warna putih.
Jika threshold kurang dari 2 maka tepi dinyatakan warna hitam. Seperti
halnya pada gambar dibawah ini.
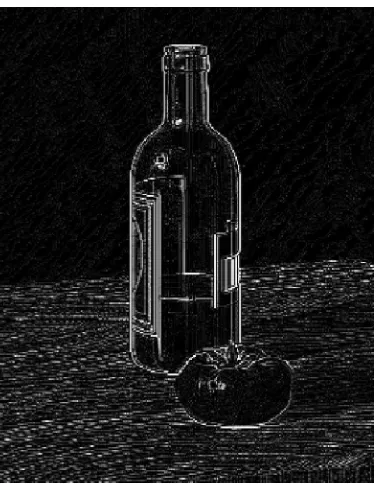
Gambar 2.3 Citra Asli menjadi Citra Compute Gradient (Dalal : 2006).
Gambar 2.4 Penjelasan Cell dan Block (Muhtadin : 2009)
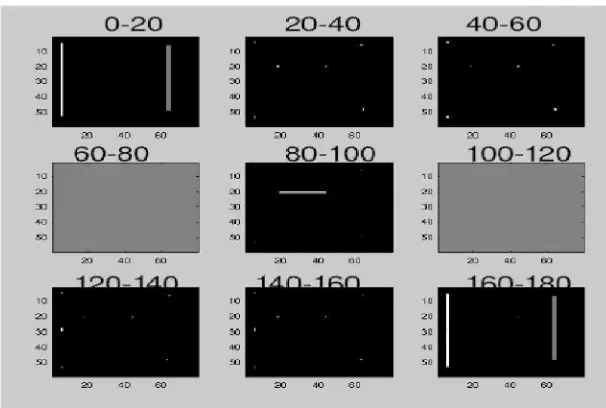
Dimana bins itu sendiri adalah histogram , bins terjadi pada 1 sampai
9 bins yang di dapat dari 0-180 yang dimana 180 : 20 = 9 bins seperti pada
gambar dibawah ini.
Gambar 2.5 Implementasi Bin (Rahul Rahjan : 2007)
e. Normalisasi Blok dan Cell : untuk menormalkan blok dan cell.
f. SVM (Support Vector Machine): mesin penentu yang berfungsi untuk
menentukan apakah gambar tersebut merupakan pedestrian atau non
pedestrian.
2.5.3. Visual Basic (.Net)
Visual Basic merupakan salah satu bahasa pemrograman OOP (Object
Oriented Programming) atau bahasa pemrograman yang berorientasi obyek
perusahaan microsoft. Bahasa pemrograman yang seringkali hanya disingkat dengan sebutan VB saja ini memiliki sejarah pengembangan yang cukup panjang berikut adalah sejarah visual basic :
1. Proyek “Thunder” dirintis. Visual Basic 1.0 (Mei 1991) dirilis untuk
windows pada Comdex/Windows Wordltrade yang di pertunjukan di
Atlanta, Georgia.
2. Visual Basic 1.0 untuk DOS dirilis pada bulan September 1992. Bahasa ini tidak kompetibel dengan Visual Basic For Windows. VB 1.0 for DOS ini pada kenyataannya merupakan versi kelanjutan dari
compiler basic, quick basic dan basic professional development
system.
3. Visual Basic 2.0 dirilis pada bulan November 1992, cakupan pemrogramannya cukup mudah untuk digunakan dan kecepatannya juga telah dimodifikasi. Khususnya pada from yang telah menjadikan obyek dapat dibuat secara seketika, serta konsep dasar dari class modul yang berikutnya diimplementasikan pada VB 4.
4. Visual Basic 3.0 dirilis pada musim panas 1993 dan dibagi menjadi versi standard dan professional. VB 3 memasuki versi 1.1 dari
Microsoft Jet Database Engine yang dapat membaca serta menulis
database Jet (atau Access) 1x.
6. Visual Basic 5.0 (Februari 1997) miscrosoft merilis secara eksklusif visual basic untuk versi windows 32 bit. Programmer yang menulis programnya pada versi 16 bit dapat dengan mudah melakukan import program VB 4 ke VB 5. Dan juga sebaliknya, program VB 5 dapat diimport VB 4. VB 5 memperkenalkan kemampuan untuk membuat
user control.
7. Visual Basic 6.0 (pertengahan 1998) memperbaiki beberapa cakupan, termasuk kemampuannya untuk membuat aplikasi Web-based. Visual basic 6 di jadwalkan akan memasuki microsoft “fasa non supported” dimulai pada maret 2008.
8. Visual Basic Net (VB 7.0) dirillis pada tahun 2002. Beberapa yang mencoba pada versi pertama. NET mengemukakan bahwa bahasa ini sangat powerfull tapi bahasa yang digunakan sangat berbeda dengan bahasa sebelumnya, dengan kekurangan diberbagai area, termasuk
runtime yang 10x lebih besar dari paket runtime VB 6 serta
peningkatan penggunaan memory.
9. Visual Basic Net 2003 (VB 7.1) dirilis dengan menggunakan NET
framework versi 1.1.
a. Edit and Continue, mungkin inilah kekurangankan fitur terbesar
dari VB.NET. pada VB 2005 ini kita diperbolehkan melakukan perubahan kode pada saat program sedang dijalankan
b. Perbaikan pada konversi dari VB ke VB Net12 Visual Basic .Net 2003 (VB 7.1), dirilis dengan menggunakan NET framework versi 1.1.
2.5.4. Emgu CV
Emgu CV merupakan lintas platform yang memungkinkan para
programmer memanggil fungsi dalam intel Open.CV image processing library agar dapat digunakan pada bahasa kompetibel.NET seperti C#, VB, dan lainnya. Keuntungan menggunakan library Emgu CV adalah :
a. Emgu CV seluruhnya dibuat berdasarkan bahasa C#, namun dapat digunakan oleh bahasa yang lain juga, seperti VB.Net, C++, dan Iron
Phyton.
b. Dalam image processing, image class menggunakan generik parameter yaitu color dan depth
c. Setelah melakukan proses pada image, Emgu CV secara otomatis akan melakukan dispose image.
d. Serialisasi XML, digunakan apabila program dikerjakan dalam WCF (Windows Communication Fundation), akan digunakan dalam layanan
web, dan membutuhkan pengembalian nilai dalam bentuk
image<TColor,TDepth> sebagai parameter. Ini juga dapat berguna untuk
Emgu CV memiliki 2 (dua) layer, layer 1 berisi function, structure, dan
enumeration mapping yang secara langsung merefleksikan yang ada di Open.CV,
ANALISIS DAN PERANCANGAN SISTEM
Pada bab ini akan dijelaskan mengenai proses pembuatan aplikasi deteksi dengan metode Histogram of Oriented Gradients menggunakan library Emgu CV.
3.1. Kebutuhan Hardware dan Software
Pada bagian ini akan dijelaskan mengenai Hardware (perangkat keras) dan software (perangkat lunak) yang digunakan pada implementasi aplikasi ini.
a. Kebutuhan Hardwar e :
1. Komputer dengan processor Intel (R) Core(TM)2Duo CPU P8700 2,5GHz
2. RAM (2048MB) dan VGA Card share memory up to 1274 MegaByte 3. Monitor 14” dan Modem AHA
4. Hard Disk 320 GigaByte
Desain sistem untuk sistem informasi penjualan CV Kautsar ini menggunakan data work flow, Diagram Flow Diagram (DFD), Conceptual Data Model (CDM) dan Physical Data Model (PDM) yang digunakan sebagai alat perancangan sistem yang berorientasi pada alur data yang dapat digunakan untuk penggambaran analisa maupun rancangan sistem.
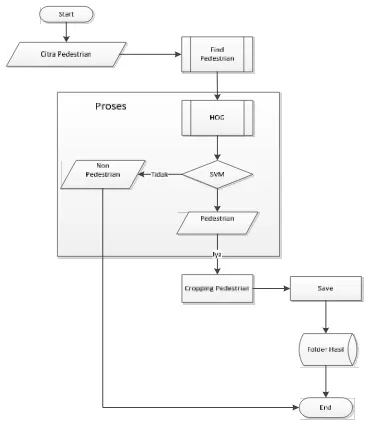
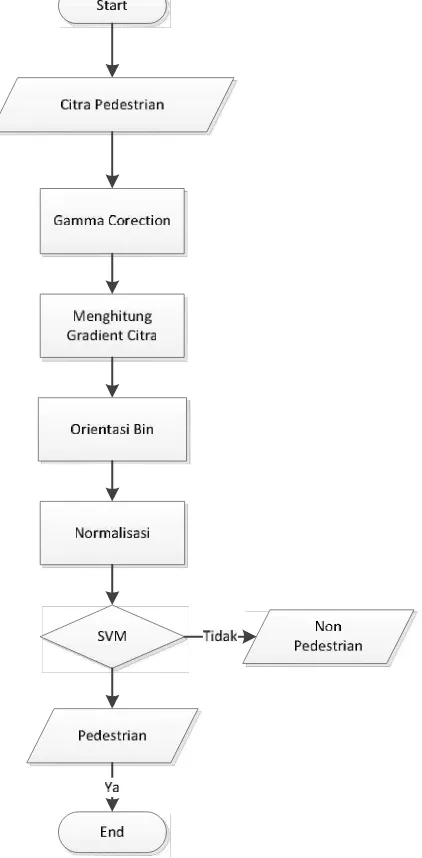
Gambar 3.1 Flowchart Desain Tahapan Pedestrian
Gambar 3.1 diatas merupakan desain tahapan dari pengembangan deteksi
pedestrian menggunakan metode histogram of oriented gradients (HOG). Untuk
3.2.1. Pr oses Pengambilan Objek Gambar
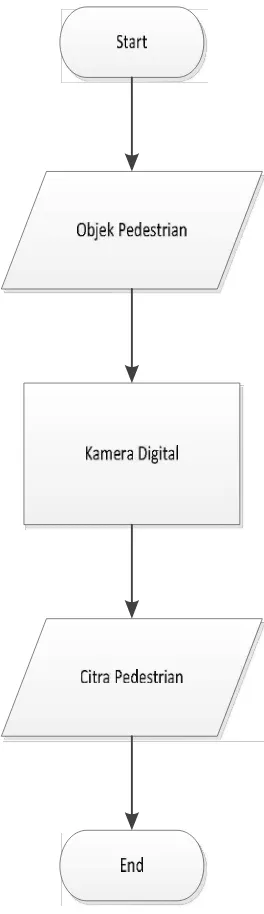
Gambar 3.2 Flowchart Proses Pengambilan Objek Gambar
mengunakan kamera digital hingga berupa data gambar yakni citra pedestrian untuk dimasukan kedalam komputer.
3.2.2. Proses Histogram of Oriented Gradients
gamma correction yang berfungsi untuk mengubah citra asli menjadi citra
gamma, kemudian citra gamma tersebut akan diproses menghitungan gradients gambar dengan menggunakan perhitungan operator sobel, setelah menghitung
gradients gambar maka proses selanjutna yakni orientasi binning yang terdiri dari
cell, block cell, dan bin. Langkah selanjutnya Normalisasi gambar berfungsi untuk
menormalkan gambar pada tiap block agar memudahkan SVM detektor untuk mendeteksi apakah citra tersebut termasuk pedestrian atau bukan pedestrian.
Dari semua proses yang telah dijelaskan akan di proses pada library Emgu CV yang dimana sudah terdapat tools atau fungsi yang sudah default (tertanam) didalamnya, sehingga proses tersebut tidak dapat dirubah.
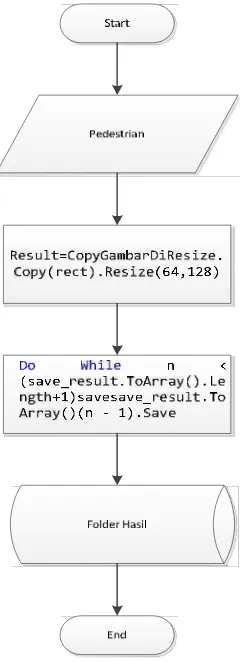
3.2.3 Proses Cropping dan Save
Proses dimana setelah terjadi proses HOG untuk mendapatkan hasil
pedestrian maka citra tersebut akan di crop pada lokasi pedestrian yang
terlokalisasi dengan pemotongan ukuran 64 x 128 pixel guna untuk mendapatkan hasil akhir kemudian disimpan pada database file pedestrian.
3.3. Perancangan Interface
Interface merupakan suatu halaman perangkat lunak sebagai tempat
interaksi bagi pengguna dan perangkat lunak tersebut. Tujuan dari perancangan
interface berikut ini agar pengguna dapat memahami proses kerja program dengan
mudah.
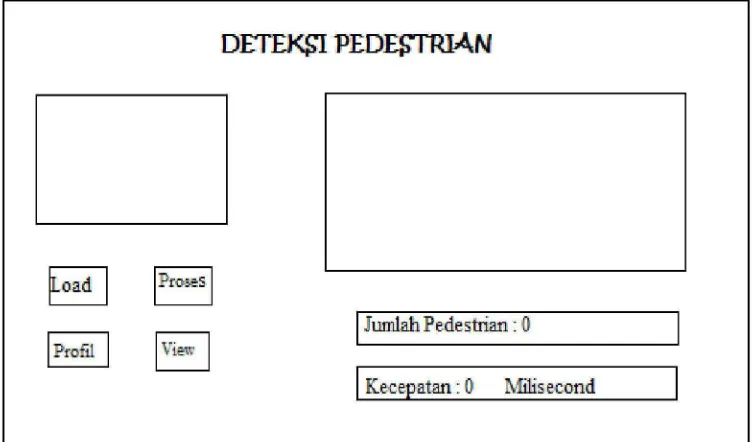
3.3.1. Interface Tampilan Awal
Pada gambar 3.5 ini merupakan form tampilan awal aplikasi. Tampilan awal aplikasi dapat dilihat ketika pertama kali aplikasi dijalankan atau ketika pengguna mengklik tombol load.
3.3.2. Interface View
Pada gambar 3.6 merupakan menu view terdapat fungsi panel, dimana dalam fungsi ini digunakan untuk menampilkan seluruh hasil proses deteksi
pedestrian.
.
Gambar 3.6 Desain Tampilan View 3.3.3. Interface Profile
Pada form profile terdapat picturebox dan texbox, dimana dalam
picturebox digunakan untuk menampilkan foto dari pembuat aplikasi dan texbox
ini digunakan untuk menampilkan biodata penulis.
Pada bab IV ini akan dijelaskan mengenai implementasi, hasil uji coba dan
evaluasi dari rancangan program yang telah dibuat pada bab III. Bagian implementasi
aplikasi kali ini meliputi: implementasi data, implementasi interface, implementasi
proses, dan uji coba.
4.1. Implementasi Da ta
Pada proses Data yang akan diimplementasikan pembuatan aplikasi deteksi
pedestrian dengan metode histogram of oriented gradients menggunakan library
Emgu.CV ini berupa citra digital yang telah diambil melalui camera digital yang
akan diproses melalui beberapa tahapan untuk melakukan lokalisasi pedestrian,
mengcropping dan penyimpanan.
4.2. Implementasi Interface
Pada implementasi interface ini digunakan untuk memudahkan user yang
akan melakukan proses deteksi pedestrian dengan menggunakan aplikasi yang telah
dibuat. Adapun gambaran dari interface aplikasi sebagai berikut :
Pada awal kita menjalankan aplikasi dengan otomatis maka aplikasi
Gamba r 4.1 Tampilan Utama Aplikasi
Pada tampilan utama aplikasi tersebut terdapat empat tombol yaitu :
1. tombol (load),
2. tombol (procces),
3. tombol (view),
4. tombol (profile).
Tombol load berfungsi untuk menginputkan gambar pada folder komputer,
tombol procces berfugsi untuk mendeteksi gambar pedestrian, tombol view berfungsi
untuk mengcropping gambar pedestrian dan otomatis menyimpannya dalam folder
hasil pada komputer, dan pada tombol profile berfungsi untuk menampilkan biodata
dengan tujuan untuk mempermudah pengguna dalam memahami dan menggunakan
aplikasi deteksi pedestrian tersebut.
Ketika pengguna mengklik tombol load maka akan ditampilkan seperti di
bawah ini :
Ga mbar 4.2 Tampilan Proses Load Gambar
Gambar pedestrian sebelumnya sudah diambil dengan menggunakan kamera
digital dan kemudian disimpan dikomputer. Setelah menekan tombol load akan
tampil jendela direktori komputer, dan kemudian cari letak image tersebut setelah itu
klik dua kali pada gambar yang dipilih. gambar yang diambil pada load adalah file
perintah open atau cancel pada menu direktori komputer. Menu tombol aplikasi
lainnya tidak bisa dijalankan sebelum proses direktori load selesai dijalankan.
Berikut ini adalah tampilan ketika pengguna mengklik tombol procces :
Gambar 4.3 Proses Procces Pedestrian
Di dalam procces terdapat dua imagebox, imageboxload berukuran 64 x 128
piksel berfungsi sebagai load image untuk memasukan gambar yang ada pada file
folder komputer, sedangkan imageboxprocces berukuran 256 x 512 piksel berfungsi
untuk menampilkan hasil dari citra pedestrian terdeteksi yang sudah dilokalisasi
(pengkotakan) dengan metode histogram of oriented gradient. Kemudian mengetahui
Berikut ini adalah tampilan ketika pengguna mengklik tombol view:
Ga mbar 4.4 Proses Pengcroppingan dan Save Gambar Pedestrian
Dimana pada proses ini adalah proses pengcroppingan hasil gambar yang
telah diproses sebelumnya sesuai dengan jumlah orang yang terdeteksi. Setelah
gambar dicropping maka akan secara otomatis menyimpan. Pada proses ini terdapat
tombol (home) yang berfungsi untuk kembali pada menu tampilan awal.
Untuk mengetahui apakah hasil pengcroppingan dan penyimpanan pada
gambar tersebut telah sukses disimpan pada komputer maka pengguna dapat
mengeceknya melalui, documents " folder visual studio 2010 " project "
Gamba r 4.5 File Folder Penyimpanan Gambar Cropping
Dan berikut ini adalah tampilan ketika pengguna mengklik tombol profile:
Dimana pada proses profile ini hanya menampilkan foto dan biodata pembuat
aplikasi deteksi pedestrian.
4.3. Implementasi Pr oses
Bagian implementasi proses ini menjelaskan mengenai implementasi
proses-proses sesuai dengan konsep yang telah dibuat pada bab III. Seperti yang telah
digambarkan dalam flowchart.
Aplikasi deteksi pedestrian ini merupakan aplikasi yang menggunakan library
Emgu.CV, oleh karena itu sebelum proses coding maka diperlukan untuk melakukan
konfigurasi pada komputer dan Microsoft Visual Studio.Net agar dapat menjalankan
fungsi-fungsi yang terdapat dalam library Emgu.CV tersebut. Berikut ini adalah
langkah-langkahnya :
1. Instalasi Open.CV dan Konfigurasinya
Untuk memulai instalasinya, double klik pada file Open.CV yang sudah
didownload. Sebenarnya ini bukanlah instalasi, melainkan hanya mengekstrak file
saja. Pilih lokasi untuk mengekstrak file .exe Open.CV. Untuk lebih memudahkan
kita ekstrak saja pada drive C. Setelah proses ekstrak file selesai, tahap selanjutnya
adalah melakukan setting path agar file library Open.CV dapat dipanggil dari Visual
Studio. Klik kanan pada Computer, pilih Properties kemudian pilih Advanced system
Ga mbar 4.7 Tampilan setting Open.CV ke-1
Kemudian klik Environment Variables.
Pada bagian System variables cari bagian path, kemudian klik edit.
Tambahkan baris berikut ini :
;C:\opencv\build\x86\vc10\lib\;C:\opencv\build\bin\;C:\opencv\build\x86\vc10\bin\
Gambar 4.9 Tampilan setting Open.CV ke-3
Klik OK, kemudian restart komputer agar system dapat mengenali path baru
tersebut.
2. Instalasi Emgu.CV dan Konfigurasinya
Seperti instalasi pada Open.CV untuk memulai instalasi double klik pada file
Emgu.CV yang sudah didownload. Pilih drive C untuk mengekstrak file .exe
Kemudian pada library pada project yang kita buat. Klik kanan pada project
kemudian klik Add reference.
Gambar 4.10 Tampilan setting Emgu.CV ke-1
Pada tab browse pilih lokasi penginstalan Emgu.CV kemudian pilih folder
bin. Pilih file Emgu.CV.dll, Emgu.CV.UI.dll dan Emgu.Util.dll.
Setelah menambahkan library kemudian menambahkan beberapa komponen
Emgu.CV ke toolbox. Komponen ini nantinya dapat digunakan untuk menampilkan
gambar seperti picture box. Untuk menambahkan komponen, terlebih dahulu pilih
bagian General pada Toolbox. Kemudian klik kanan dan pilih Choose Items.
Gambar 4.12 Tampilan setting Emgu.CV ke-3
Pada bagian Framework Components beri centang pada bagian Image Box
dan kemudian klik OK.
Setelah itu otomatis komponen Image Box akan muncul pada Toolbox pada
bagian General.
Gambar 4.14 Tampilan setting Emgu.CV ke-5
Pada view code di project yang telah dibuat tambahkan kode sebagai berikut:
Imports Emgu.CV
Imports Emgu.CV.Structure
Imports Emgu.CV.UI
4.3.1. Pr oses Load
Pada proses load ini, merupakan sebuah proses yang bertujuan untuk
menampilkan inputan berupa gambar. Gambar yang dapat dibuka hanya gambar yang
berformat jpg, jpeg. Berikut adalah potongan source code proses load.
‘ LOAD
I f OpenFi l eDi al og1. ShowDi al og( ) = Di al ogResul t . OK Then
Di m i mg As I mage(Of Bgr, Byt e) = New I mage(Of Bgr,
Byt e) ( OpenFi l eDi al og1. Fi l eName)
I mageBoxLoad. I mage = i mg
End I f
4.3.2. Pr oses Pada Button Procces Pedestrian
Pada proses button procces pedestrian terdapat tiga proses pemanggilan
didalam source code procces yaitu; Find Pedestrian, dimana untuk melokalisasi
gambar pedestrian dan memanggil proses histogram of oriented gradients pada
library EMGU.CV. Cropping Image, untuk memotong gambar pedestrian yang telah
terdeteksi dengan ukuran 64x128 dan Save Image, menyimpan gambar pedestrian
‘ FI ND PEDESTRI AN
Proses yang berfungsi hanya menampilkan hasil cropping gambar pedestrian.
‘ MENAMPI LKAN HASI L PADA PANEL
Proses yang hanya menampilkan biodata pembuat aplikasi.
‘ PROFI LE
Pr i vat e Sub But t onpr of i l e_Cl i ck(ByVal sender As
Syst em.Obj ect, ByVal e As Syst em.Event Ar gs) Handl es
For m2. Show( )
End Sub
4.4. Uji Coba Pr ogr am
Pada sub bab ini akan dibahas mengenai uji coba terhadap aplikasi yang telah
dibuat dan selanjutnya akan dievaluasi dari hasil uji coba tersebut. Uji coba
dilaksanakan untuk mengetahui kemampuan aplikasi dapat berjalan dengan baik
sesuai dengan rancangan. Evaluasi dilakukan untuk menentukan tingkat keberhasilan
dari aplikasi yang dibuat.
4.4.1. Skenar io Uji Coba
Untuk memastikan bahwa aplikasi ini berjalan dengan baik, diperlukan
adanya skenario yang akan dicoba, antara lain :
a. Memasukkan beberapa image untuk melihat keberhasilan, karena tiap-tiap image
hasil jepretan kamera digital selalu berbeda, hal itu dipengaruhi oleh jarak ambil,
cahaya serta kondisi objek gambar yang akan diambil.
b. Melakukan proses histogram of oriented gradients, untuk menguji tingkat
keberhasilan melalui proses yang sudah direncanakan. Apakah citra tersebut
dapat terdeteksi dengan baik atau tidak.
c. Melakukan Cropping dan Save Image, hasil dari histogram of oriented gradients
kemudian akan disimpan, kedalam file folder komputer, oleh karena itu perlu
diuji tingkat keberhasilan penyimpanannya.
4.4.2. Pela ksa naa Uji Coba
Setelah melakukan perancangan interface aplikasi dan pengcodingan
program, kemudian melakukan uji coba aplikasi tersebut. Dari project yang telah
dibuat tekan F5 untuk memulai menjalankan aplikasi deteksi pedestrian.
Langkah pertama dalam membuat program deteksi pedestrian adalah
dengan merancang tampilan program menggunakan new project pada Visual
Basic (.Net) 2010. Setelah perancangan program deteksi pedestrian dibuat dan
dimasukkan source code ke dalam program, maka langkah terakhir adalah
dengan mencoba program tersebut. Dengan menekan tombol load dan procces,
akan diperoleh hasil dari deteksi pedestrian. Gambar-gambar di bawah ini
merupakan tampilan program deteksi pedestrian.
Tombol Load pada tampilan form utama berfungsi untuk mengambil image
yang sudah tersimpan dikomputer. Image sebelumnya sudah diambil dengan
menggunakan kamera digital dan kemudian disimpan dikomputer.
Setelah menekan tombol load maka akan tampil jendela direktori komputer,
dan kemudian cari letak image tersebut kemudian klik dua kali pada image. Image
yang diambil pada load adalah file image yang berformat JPG. Pada proses load ,
program hanya bisa menjalankan perintah open atau cancel pada menu direktori
komputer. Menu tombol aplikasi lainnya tidak bisa dijalankan sebelum proses
direktori load selesai dijalankan.
Ga mbar 4.16 Tampilan Proses Load Image
Tombol Processe berfungsi untuk menjalankan proses deteksi pedestrian.
berwarna RGB. Setelah tombol procces diproses maka akan muncul output
pedestrian seperti pada gambar dibawah ini :
Ga mbar 4.17 Proses Deteksi Pedestrian
Setelah tombol procces dijalankan proses selanjutnya adalah proses
pengcroppingan dan save. Terlihat seperti pada gambar dibawah ini :
Maka hasil pengesavean gambar pedestrian yang telah terpotong tadi akan
tersimpan pada folder komputer. Seperti tampilan gambar dibawah ini :
Gamba r 4.19 Penyimpanan Gambar Hasil Cropping
Berikut adalah gambar profile pembuat aplikasi .
4.5. Analisa Aplikasi
Berdasarkan hasil uji coba yang telah dilakukan, maka akan dilakukan analisa,
antara lain sebagai berikut :
4.5.1. Analisis Pr oses Histogram Of Oriented Gradients
Pada analisa proses ini terdapat 2 (dua) hasil uji coba berdasarkan ;
1. Jarak Pengambilan Gambar
Pengambilan gambar dimulai dari jarak 3 meter sampai 6 meter, karena
pengambilan gambar dengan jarak 2 meter sampai 2,5 meter sudah memenuhi frame
sehingga tidak dapat terdeteksi karena semakin dekat. Dan pada jarak 6 meter
kecepatan terdeteksinya sangat lama sehingga saya tidak menampilkan jarak 7 meter
karena semakin jauh objek pedestrian tidak dapat terdeteksi.
No Load Image Jarak Hasil Kecepatan
1 3
Meter
59 ms
2 3,5
Meter
3 4
Meter
56 ms
4 4,5
Meter
57 ms
5 5
meter
55 ms
6 5,5
meter
61 ms
7 6
meter
62 ms
Dari gambar diatas kesimpulan yang didapat berdasrkan jarak yang terbagus
dan keberhasilan terdeteksi terdapat pada jarak 5 meter yang terbaik karena pada
jarak tersebut kecepatan terdeteksinya paling cepat yakni 5 milisecond dibandingkan
pada jarak lainnya. Oleh karena itu saya akan mencoba uji coba dengan jarak yang
terbaik 5 meter dengan objek pedestrian yang berbeda.
2. Pengambilan gambar dengan jarak 5 meter dengan objek pedestrian yang
berbeda.
No Load Image Hasil
Jumlah Kecepatan
1 1 44 ms
3 4 67 ms
4 2 55 ms
6 2 61 ms
7 2 52 ms
9 2 58 ms
10 2 58 ms
12 2 65 ms
13 1 52 ms
15 5 86 ms
Tabel 4.2 Tabel Uji Coba Pedestrian Dengan Jarak 5 Meter Objek Berbeda
Dari percobaan table 4.2 yang telah dilakukan dengan jarak 5 meter
(stabil) serta pengambilan objek gambar yang berbeda-beda dapat disimpulkan bahwa
metode ini dapat mendeteksi pedestrian dengan baik dengan cahaya dan jarak yang
stabil.
Akan Tetapi metode ini tidak dapat mendeteksi pedestrian secara sempurna
apabila pedestrian tersebut terjadi tumpukan (overlap) atau terlalu banyak yang
berjalan, hanya dapat mendeteksi pedestrian yang jelas atau berada paling awal.
Karena metode ini memiliki batas kemampuannya hanya mendeteksi objek yang
terlihat jelas atau tidak terjadi tumpukan serta dapat dilihat juga semakin sedikit
pedestrian yang dideteksi maka semakin cepat pula kecepatan terdeteksinya. Dan
begitu pun juga sebaliknya semakin banyak orang yang berjalan maka semakin lama
juga kecepatan terdeteksinya.
Hal ini terjadi karena metode ini terdapat SVM detector yang berfungsi untuk
3. Hasil uji coba perbandingan dengan perhitungan manual dan komputer
No Gambar Hasil
Perhitungan
Program
Hasil
Perhitungan
Manual
Jumlah
Kesalahan
Berhasil atau
Tidak
Berhasil
1. 1 1 0 Berhasil
2. 2 2 0 Berhasil
3 4 4 0 Berhasil
5 2 2 0 Berhasil
6 2 2 0 Berhasil
7 2 2 0 Berhasil
8 2 2 0 Berhasil
10 2 2 0 Berhasil
11 1 1 0 Berhasil
12 3 3 0 Berhasil
13 1 1 0 Berhasil
14 5 13 8 Tidak
15 5 12 7 Tidak
Berhasil
Tabel 4.3 Perbandingan Perhitungan Komputer Dengan Manual
Dari percobaan 4.3 yang telah dilakukan, dapat disimpulkan bahwa
perbandingan antara perhitungan secara manual dengan perhitungan komputer dapat
diberi kesimpulan dengan menghitung persentase berdasarkan keberhasilan yakni,
10 0 % = 10 0 % = 86,67% sedangkan untuk menghitung
persentase berdasarkan kesalahan yakni, 100 % =
10 0 % = 13,33% maka kesimpulan yang didapat akurasi keberhasilan
KESIMPULAN DAN SARAN
Setelah dilakukan pembahasan teori, perancangan aplikasi, dan pengujian terhadap aplikasi pada bab-bab sebelumnya, maka pada bab penutup ini akan diambil kesimpulan serta saran pengembangan dari tugas akhir “Deteksi
Pedestrian Menggunakan Metode Histogram of Oriented Gradients Pada Library
EMGU CV” ini.
5.1. Kesimpulan
Dari uji coba yang telah dilakukan dapat dianalisa hasil pengujian terhadap deteksi pedestrian menggunakan metode histogram of oriented gradients ini dapat diambil beberapa kesimpulan antara lain:
1. Histogram of Oriented Gradient menerapkan tentang image processing pedestrian dengan meload, melokalisasi gambar, pengcroppingan, dan
penyimpanan. Dan Support Vector Machine mendukung untuk menentukan mana yang termasuk pedestrian atau non pedestrian.
2. Penerapan metode histogram of oriented gradients pada deteksi pedestrian dapat berjalan dengan baik, terbukti dari hasil uji coba yang telah dilakukan dengan jarak terbaik 5 meter (stabil) serta pengambilan objek gambar yang berbeda-beda dapat disimpulkan bahwa metode ini dapat mendeteksi pedestrian dengan baik dengan cahaya dan jarak yang stabil. 3. Dari hasil uji coba yang dilakukan tingkat akurasi keberhasilan sebesar
5.2. Sar an
Pada pembuatan aplikasi ini terdapat saran-saran yang terkait untuk pengembangan lebih lanjut. Saran-saran tersebut antara lain:
a. Masih banyak terdapat kekurangan disetiap segi materinya, oleh karena itu diharapkan saran dan kritik dari pembaca yang bersifat membangun untuk kedepannya.
b. Pada aplikasi terdapat kekurangan dalam pendesainan atau program dapat dikembangkan lagi menjadi lebih baik.
c. Untuk memperbaiki tingkat akurasi sistem diperlukan penambahan jumah data training pedestrian.
Triggs,Dalal. (2006), Feature Histogram of Oriented Gradients, [Online], (http://library.binus.ac.id, diakses tanggal 7 Maret 2013, pukul 09.12 WIB)
Seo, N. (2007), HOG Pada Emgu CV, [Online], (http://seonsean.blogspot.com, diakses tanggal 7 Maret 2013, pukul 09.27 WIB)
Dalal & Bill. (2005), Teori Histogram of Oriented Gradients, [Online], (http://en.wikipedia.org/wiki, diakses tanggal 7 Maret 2013, pukul 09.47 WIB)
Bahri,Taufik. (2012), Pengertian dan Penerapan Komputer Vision, [Online], (http://taufik-pblog.blogspot.com, diakses tanggal 7 Maret 2013, pukul 10.45 WIB).
Haralick dan Shapiro. (1992), Pengertian Citra Analog dan Digital, [Online], (http://library.binus.ac.id, diakses tanggal 7 Maret 2013, pukul 11.37 WIB).
Harln,Twinkle. (1977), Person Walking InThe Street, [Online], (http://salmanisaleh.files.wordpress.com, diakses tanggal 7 Maret 2013, pukul 11.58 WIB)
Rapoport,Amos. (1977), Pengertian Dasar Mengenai Pedestrian, [Online], (http://salmanisaleh.files.wordpress.com, diakses tanggal 7 Maret 2013, pukul 11.58 WIB)
Gideon,Giovani. (1977). Pengertian Dasar Mengenai Pedestrian, [Online], (http://salmanisaleh.files.wordpress.com, diakses tanggal 7 Maret 2013, pukul 11.58 WIB).
Muhtadin. (2009). Bagian-Bagian yang Dinamakan Cell, [Online], (http://digilib.its.ac.id, diakses tanggal 7 Maret 2013, pukul 13.20 WIB).
Rahjan, Rahul. (2007). Fast Human Detection Using a Cascade of Histograms of
Oriented Gradients, [Online], (www.merl.com, diakses pada tanggal 7 Maret
2013, pukul 13.55 WIB).
Hashemi, Akbar. (2011). Sejarah VB.Net, [Online], (http://gue10.blogspot.com, diakses pada tanggal 7 Maret 2013, pukul 14.01 WIB).