DESIGN METHODOLOGY OF FUZZY LOGIC CONTROL
Henry Nasution
Ph.D Student at Faculty of Mechanical Engineering, Universiti Teknologi Malaysia Karung Berkunci 791, 8130 UTM Skudai, Johor Darul Ta’zim, Malaysia
Phone. (607) 5533333 Ext. 34788 Fax. (607) – 5566159
Abstract
The fuzzy logic control system is expected to be able to reproduce the behavior of the target system. The target system may be human operator in change of a processing plant. Fuzzy logic control can be pursued in the following stages : select relevant input and output variables, determine the number of linguistic terms associated with each input and output variables, choose appropriate family of membership functions, interview human expert who familiar with the target systems to determine the collection of fuzzy If -Then rules and membership functions, and refine the membership functions and rules.
Keywords : Fuzzy control, Design Method, Membership function, Temperature control.
1. Introduction
Fuzzy logic was introduced by Professor Lotfi Zadeh in 1965. Not it the least degree trying to undermine his achievements, this theory has its roots in the previous history of science, particularly in logic science. Although logic as a branch of Western science had been developing as binary logic, there were some famous paradoxes that could not be solved by binary logic.
When the concepts of fuzzy logic were first published in the U.S., they faced a lot of critics. One example from Zadeh’s colleagues :
“ …. I would like to comment briefly on Prof. Zadeh’s presentation. His proposals could be severely, ferociously, even brutally criticized from a technical point of view. This would be out of place here. But a blunt question remains : Is Zadeh presenting important ideas or is he indulging in wishful thinking ? The most serious objection of “Fuzzification” of system analysis is that lack of methods of system analysis is not the principal scientific problem in the ‘system’ field. That problem is one of developing basic concepts and deep insight into the nature of ‘system’, perhaps trying to find something akin to the ‘laws’ of Newton. In my opinion, Zadeh’s suggestion have no chance to contribute to the solution of this problem ….” (R.E. Kalman, 1972).
Even today, where hundreds of successful fuzzy logic application have proved the value of this technology, some scientists still condemn the concept, as this more recent example shows :
“… Fuzzy logic is based on fuzzy thinking. It fails to distinguish between the issues specifically addressed by the traditional methods of logic, definition and statistical decision making …” (Jon Konieki in AI Expert, 1991)
In the last two decades, the fuzzy sets theory has established itself as a new methodology for dealing with any sort of ambiguity and uncertainty. An underlying philosophy of the theory is a mathematical framework where imprecise conceptual phenomena in modeling and decision making may be precisely and rigorously studied. It lets mathematical models describe rather un modeled situation and finds solution of unsolvable problems. The theory includes a new mathematical apparatus and computer realizable models.
Fuzzy logic is an innovative technology that enhances conventional system design with engineering expertise. Using fuzzy logic, you will circumvent the need for rigorous mathematical modeling. Fudge factors in your control system will be replaced by a self explanatory linguistic description of the control strategy (Altrock, 1995).
2. What and Why Fuzzy Logic
One of the major development of fuzzy set theory, fuzzy logic was primarily designed to represent and reason with some particular form of knowledge. It was assumed that the knowledge would be expressed in a linguistic or verbal form, conventional control system divide the world into yes and no (1,0), but by using fuzzy logic, the true value are expressed by the world of natural language, e.g. true, more or less true, rather false etc (1, 0.7, 0.5, 0.1, 0). Fuzzy logic put a scale between yesby the side of no. Fuzzy logic translates qualitative strategy derived from human experience to a formulation acceptable to a computer.
Fuzzy logic is powerful problem solving methodology with a myriad of applications in embedded control and information processing. Fuzzy provides a remarkably simple way to draw definite conclusions from vague, ambiguous or imprecise information. In a sense, fuzzy logic resembles human decision making with its ability to work from approximate data and find precise solutions.
Unlike classical logic which requires a deep understanding of a system, exact equations, and precise numeric values, fuzzy logic incorporates an alternative way of thinking, which allows modeling complex systems using a higher level of abstraction originating from our knowledge and experience. Fuzzy logic allows expressing this knowledge with subjective concepts such as very hot, bright red, and a long time which are mapped into exact numeric ranges.
Fuzzy logic can (Marzuki, 1996) : represent vague language naturally, enrich not replace crisp sets, allow flexible engineering design, improve model performance, are simple to implement, and best of all they often work.
Reznik (1997) reported, why fuzzy logic : ability to translate imprecise/vague knowledge of human experts, simple, easy to implement technology, software design and hardware implementation support, results are easy to transfer from product to product, smooth controller behavior, robust controller behavior, and ability to control unstable systems.
Fuzzy logic is a paradigm for an alternative design methodology which can be applied in developing both linear and non-linear systems for embedded control. By using fuzzy logic, designer can realize lower development costs, superior, features, and better end product performance.
With fuzzy logic the first step is to understand and characterize the system behavior by using our knowledge and experience. The second step is to directly design the control algorithm using fuzzy rules, which describe the principles of the controllers regulation in terms of the relationship between its input and outputs. The last step is to simulate and debug the design. If the performance is not satisfactory we only need to modify some fuzzy rules and re-try.
3. Fuzzy Sets and Fuzzy Relation
3.1 Definition of fuzzy sets
degrees of membership can be thought of as conforming to the fact that the boundaries of the fuzzy sets are vague and ambiguous. Hence, membership of an element from the universe in this set is measured by a function which attempts to describe vagueness and ambiguity.
A fuzzy set then is a set containing elements which have varying degrees of membership in the set. This idea is contrasted with classical, or crisp, sets because complete in that set (i.e., their membership is assigned a value of 1). Elements in a fuzzy set, because their membership can be a value other than complete, can also be members of other fuzzy sets on the same universe.
Elements of a fuzzy set are mapped to a universe of “membership values” using a function theoretic form. Fuzzy sets are denoted by a set symbol with a tilde understrike, so for example, A would be the “fuzzy set” A. This function maps elements of a fuzzy set A to real numbered value on the interval 0 to 1. If an element in the universe, say x is a member of fuzzy set A then this mapping is given as,
µ A(x)∈[0,1] [1]
A = (x, µ A(x) |x∈ X [2]
A notation convention for fuzzy sets that is popular in the literature when the universe of discourse, X, is discrete and finite, is given below for a fuzzy set A by,
A =
+
+
=
∑
i i
i A A
x
x
x
x
x
x
(
)
...
)
(
)
(
2 2
1 1
A
µ
µ
µ
[3]
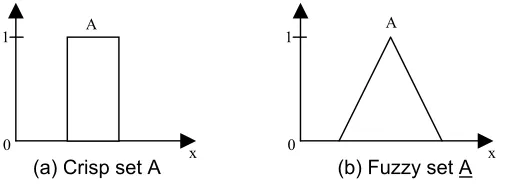
These mapping are show in Figure 1. membership function for crisp and fuzzy sets, respectively.
(a) Crisp set A (b) Fuzzy set A A
x 0
A 1
0 x
1
Figure 1. Membership function for crisp and fuzzy set and, when the universe, X, is continuous and infinite, the fuzzy set A is denoted by,
A =
∫
x
x
A
(
)
µ
[4] In both notations, the horizontal bar is not quotient, but rather a delimiter. In both notations, the numerator in each individual expression is the membership value in set A associated with the element of the universe indicated in the denominator of each expression. In the first notation, the summation symbol is not for algebraic summation, but rather is denoting a fuzzy union, hence the “+” signs in the first notation are not algebraic “add”, but rather function theoretic union. In the second notation the integral sign is not an algebraic integral, but rather a set union notation for continuous variables.
3.2 Fuzzy set operation
The use of fuzzy sets provides a basis for the systematic manipulation of vague and imprecise concepts using fuzzy set operations performed by manipulating the membership functions. Let A and B be two point valued fuzzy sets in X with membership functions µA and µB. For a given element x of the
• Equality : A = B iff µA (x) = µB(x) ∀ x ∈X [5] • Union : µA∪B (x) = max { µA (x) , µB (x)} ∀ x ∈X [6] • Intersection : µA∩B (x) = max { µA (x) , µB (x)} ∀ x ∈X [7] • Complement : µA’ (x) = 1 - µA (x) ∀ x ∈X [8] • Subset : A ⊆B iff µA (x) ≤µB (x) ∀ x ∈X [9]
Some notes on the 5 fuzzy operations (Marzuki, 1996) :
• The above definitions of union, intersection and complement work equally well for ordinary ‘crisp’ sets.
• Note that in the fuzzy case, if A and A’ complements, their intersection need not be the empty set.
• The closer the sets are to being crisp, the closer their intersection will be to being empty.
• Note also that if A and A’ are complements, their union is not necessarily equal to the universe.
• The closer they are to being crisp, the closer their union will be to being the universe.
3.3 Properties of fuzzy sets
Fuzzy sets follow the same properties as do crisp sets. Because of this and because the membership values of a crisp set are a subset of the interval [0,1], classical sets can be though of as a special case of fuzzy sets. Frequently used properties of fuzzy sets are listed below.
• Commutativity : A ∪ B = B ∪ A
A ∩ B = B ∩ A [10]
• Associativity :A ∪ ( B ∪ C ) = ( A ∪ B ) ∪ C
A ∩ ( B ∩ C ) = ( A ∩ B ) ∩ C [11]
• Distibutivity : A ∪ ( B ∩ C ) = ( A ∪ B ) ∩ ( A ∪ C )
A ∩ ( B ∪ C ) = ( A ∩ B ) ∪ ( A ∩ B ) [12]
• Idempotency : A ∪ A = A and A ∩ A = A [13]
• Identity : A ∪∅ = A and A ∩ X = A and A ∩∅ = ∅
and A ∪ X = X [14]
• Transitivity : If A ⊆ B ⊆ C, then A ⊆ C [15]
• Involution : Ā = A [16]
4. Design Methodology
The primary goal of control engineering is to distill and apply knowledge about how to control a process so that the resulting control system will reliably and safely achieve high performance operation. In this section we show how fuzzy logic provides a methodology for representing and implementing our knowledge about best to control process.
Why fuzzy logic control (Marzuki, 1996) :
• During the past decade, fuzzy logic control has emerged as one of the most active and fruitful research areas in the application of fuzzy set theory, fuzzy logic and fuzzy reasoning.
• Many industrial and consumer product using fuzzy logic technology have been built, especially in Japan.
• In contrast to conventional control techniques, fuzzy logic control is best utilized in complex ill-defined processes that can be controlled by a skilled human operator without much knowledge of their underlying dynamics.
• The basic idea behind fuzzy logic control is to incorporated the expert experience of human operator in the design of a controller in controlling a process whose input-output relationship is described by a collection of fuzzy control rules involving linguistic variables.
• This utilization of linguistic variables, fuzzy control rules, and approximate reasoning provides a means to incorporate human expert experience in designing the controller.
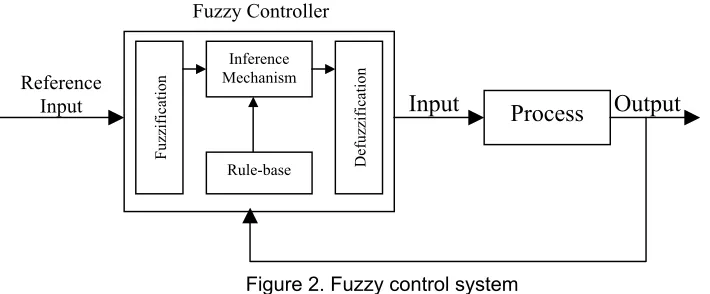
A block diagram of fuzzy control system is shown in Figure 2. Basically in fuzzy control system, there are four major stages to accomplish the control process : Choosing fuzzy controller inputs and outputs, Fuzzification, Inference mechanism, and Defuzzification.
Fuzzy Controller
Reference
Input
Input Output
Process
Inference Mechanism
Rule-base Def
u
zzif
ication
Fuzzif
ication
Figure 2. Fuzzy control system
4.1 Choosing fuzzy controller inputs and outputs
The objective of the first stage is to study the system where we want to place our control system. From that, we have to identify and establish the architectural characteristics of the systems. What is the fuzzy input and output variable to our control system.
For more complex application, the choice of the inputs to controller and output of the controller (inputs to the plant) can be more difficult. Essentially, you want to make sure that the controller will have the proper information available to be able to make good decisions and have proper control inputs to be able to steer the system in the direction needed to be able to achieve high performance operation. Practically speaking, access to information and the ability to effectively control the system often cost money. In some academic problems you may be given the plant inputs and outputs, in many practical situations you may have some flexibility in their choice. These choice affect what information is available for making on-line decisions about the control of a process and hence affect how we design a fuzzy controller.
Once the fuzzy controller inputs and outputs are chosen, you must determine what the reference inputs are. After all the inputs and outputs are defined for the fuzzy controller, we can specify the fuzzy control system.
4.2 Fuzzification
convert its numeric inputs ui ∈ Ui into fuzzy sets (a process called fuzzification) so that they can be
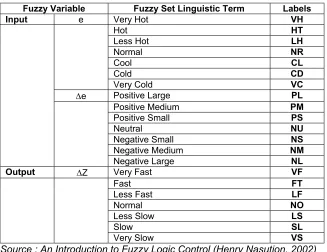
used by the fuzzy system. Each input and output variable in the fuzzy model which are given unique names called labels (Table 1.), within the domain of the variable.
Table 1. Fuzzy set and labels
Fuzzy Variable Fuzzy Set Linguistic Term Labels
Input e Very Hot VH
Hot HT
Less Hot LH
Normal NR
Cool CL
Cold CD
Very Cold VC
∆e Positive Large PL
Positive Medium PM
Positive Small PS
Neutral NU
Negative Small NS
Negative Medium NM
Negative Large NL
Output ∆Z Very Fast VF
Fast FT
Less Fast LF
Normal NO
Less Slow LS
Slow SL
Very Slow VS
Source : An Introduction to Fuzzy Logic Control (Henry Nasution, 2002)
Membership function need to be assigned ( m = Z → [0,1] ) to each fuzzy subset. The membership functions for fuzzy sets can have many different shapes, depending on definition. Some of the possible membership functions are shown :
• S – membership function :
0.5 1 x µA [17] > ≤ ≤ − − − ≤ ≤ − − < = c for x 1 c x b for )] /( ) [( 2 1 b x a for )] /( ) [( 2 a for x 0 ) , , ; ( a c c x a c a x c b a x S
a b c
• Phi – membership function :
c-b/2 c+b/2
c-b c+ b
• Triangular membership function : µA [19] > ≤ ≤ ≤ ≤ < = c for x 0 c x b for b) -x)/(c -(c b x a for a) -a)/(b -(x a for x 0 ) , , ; (xabc T
b
a c
1
x
• Trapezoidal membership function :
[20] > ≤ ≤ ≤ ≤ ≤ ≤ < = Π δ δ γ γ δ δ γ β β α α β α α δ γ β α for x 0 x for ) -x)/( -( x for 1 x for ) -)/( -(x for x 0 ) , , , ; (x δ γ β α 1 x µA
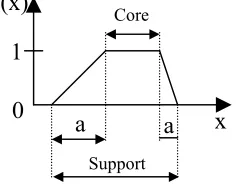
Figure 3., assists in this description of fuzzy membership function :
Core
a
a
Support0
1
µ
(x)
x
a : Boundary
Figure 3. Description of fuzzy membership function
The core of a membership function for some fuzzy set A is defined as that region of the universe that is characterized by complete and full membership in the set A. That is, the core comprises those elements x of the universe such that µA (x) = 1. The support of a membership function
for some fuzzy set A is defined as that region of the universe that is characterized by nonzero membership in the set A. That is, the support comprises those elements x of the universe such that µA
(x) > 0. The boundaries of a membership function for some fuzzy set A are defined as that region of the universe containing elements that have a nonzero membership but not complete membership. That is, the boundaries comprise those elements x of the universe such that 0 < µA (x) < 1. These elements
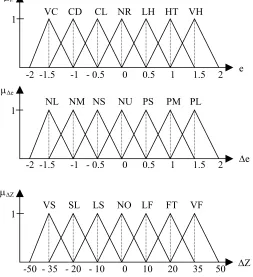
Let say the labels for input variables e and ∆e is {VC, CD, CL, NR, LH, HT, VH} and {NL, NM, NS, NU, PS, PM, PL} respectively while the labels for output variable ∆Z is {VS, SL, LS, NO, LF, FT, VF}. Then the membership functions may be presented as in Figure 4.
-50 - 35 - 20 - 10 0 10 20 35 50 -2 -1.5 -1 - 0.5 0 0.5 1 1.5 2 -2 -1.5 -1 - 0.5 0 0.5 1 1.5 2
1 1
1
µ∆e µe
µ∆Z
VS SL LS NO LF FT VF NL NM NS NU PS PM
PL VC CD CL NR LH HT VH
e
∆e
∆Z
Figure 4. Triangular membership functions for e, ∆e and ∆Z
There are some rules of thumb which are helpful in defining fuzzy set (Lim, 1998 ; Ong, 1999) :
• The number of labels (unique names of fuzzy subset) with variable should generally be an odd number between 5 and 9. And the amount is very much depends on the complexity on the control system.
• Each should overlap somewhat with its neighbors. The overlap should be between 10 % and 50 % of the neighbors space. And the sum of the vertical points of the overlap should always be less than 1 as shown in Figure 5.
1
X
Y
X + Y < 1
Figure 5. Rule of membership function
4.3 Inference mechanism
An inference mechanism also called an inference engine or fuzzy inference module, which emulates the expert’s decision making in interpreting and applying knowledge about how best to control the plant (Passino, 1998).
In the inference mechanism, rules If-Then need to be developed to control the process. Expert’s knowledge and experience should take place home to develop the appropriate rule in order to perform an ideal control system. The rules that have been developed by the expert can be simply by constructing the fuzzy associative memories (FAM), which associate fuzzy set of output fuzzy variable
∆Z with fuzzy sets of input variables e and ∆e.
For example, by implementing example of Figure 4., a FAM with 7 times 7-bank matrix has been construct as in Table 2.
Table 2. Fuzzy associative memories (FAM)
e ∆e
VC CD CL NR LH HT VH
NL VS VS SL LS FT VF VF
NM SL SL SL LS LF FT FT
NS SL LS LS LS NO LF LF
NU LS LS NO NO NO LF LF
PS LS LS NO NO LF FT FT
PM SL SL LS LF LF FT FT
PL VS VS SL LS FT VF VF
Source : An Introduction to Fuzzy Logic Control (Henry Nasution, 2002)
After developing the FAM, the next stop is the inference engine, the objective of the inference engine is to make a choice when there are an output variable fuzzy set with different values. Normally, we can use the Correlation Minimum Encoding technique to do the inferencing (Ong, 1999).
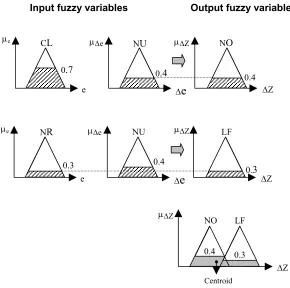
The procedure or the correlation minimum encoding technique is to choose the minimum value among all the values in a single input variable fuzzy set, to insert the minimum value to the output variable fuzzy set as shown in Figure 6. The figure shows that when the membership function value of the input variable “e” and “∆e” is 0.7 at membership function “CL” and 0.4 at membership function “NU” respectively, the membership value of the output variable “∆Z” will be 0.4 at membership function “NO”. Input Fuzzy Variable Output Fuzzy Variable
µ
e ∆Z = NO at 0.4
∆e = NU at 0.4 e = CL at 0.7
∆
e
e
µ
∆Zµ
∆e∆
Z
4.4 Defuzzyfication
As mentioned in the introduction, there may by situations where the output of a fuzzy process needs to be a single scalar quantity as opposed to a fuzzy set. Defuzzification is the conversion of a fuzzy quantity to a precise quantity, just as fuzzification is the conversion of a precise quantity to a fuzzy quantity. The output of a fuzzy process can be the logical union of two or more fuzzy membership function defined on the universe of discourse of the output variable.
At least seven methods in the literature, among the many that have been proposed by investigators in recent year, are popular for defuzzifying fuzzy output functions (membership functions).
o Max membership principle, Also known as the height method, this scheme is limited to peaked output function. This method is given by the algebraic expression :
µx (z*) ≥µx (z) for all z∈ Z [21]
z
1
µ
z*
o Centroid method, This procedure (also called center of area, center of gravity) is the
most prevalent and physically appealing of all the defuzzification methods, it is given by the algebraic expression
∫
∫
=
dz
z
zdz
z
z
x x
)
(
).
(
*
µ
µ
[22]
z
1
µ
z*
where ∫ denotes an algebraic integration.
o Weighted average method, This method is only valid for symmetrical output membership function. It is given by the algebraic expression :
∑
∑
=
)
(
).
(
*
z
z
z
z
x x
µ
µ
[23]
a b
µ
1 0.9
0.5
z
where Σ denotes an algebraic sum. The weighted average method is formed by weighting each membership function in the output by its respective maximum membership value. Since the method is limited to symmetrical membership functions, the values “a” and “b” are the means of their respective shapes.
2
*
a
b
z
=
+
[24]o Center of sums, This faster than many defuzzification methods that are presently in use. This process involves the algebraic sum of individual output fuzzy sets, say C1
and C2, instead of their union. One drawback to this method is that the intersecting
areas are added twice. The defuzzified value z* is given by the following equation :
∫∑
∫ ∑
= =
z n
k C
n
k C
dz
z
dz
z
z
k k
1 1 *
)
(
)
(
µ
µ
=
zz
[25]This method is similar to the weighted average method, except in the center of sums method the weights are the areas of the respective membership functions whereas in the weighted average method the weights are individual membership values.
o Center of largest area, If the output fuzzy set has at least two convex sub-regions, then the center of gravity (i.e., is calculated using the centroid method) of the convex fuzzy sub-region with the largest area is used to obtain the defuzified value z* of the output.
∫
∫
=
dz
z
dz
z
z
z
m m
x x
)
(
.
)
(
*
µ
µ
[26]
where xm is the convex sub-region that has the largest area making up xk. This
condition applies in the case when the overall output xk is non convex, and in the case
when xk is convex, z *
is the same quantity as determined by the centroid method or the center of largest area method (because then there is only one convex region).
µ
z
*1
1z* C2 C1
µ
z
*
a
µ
1
z
b
z
z
o First (or last) of maxima, This method uses the overall output or union of all individual output fuzzy sets xk to determine the smallest value of the domain with maximized
membership degree xk. The equation of for z *
are as follow.
First, the largest height in the union [denoted hgt(xk)] is determined,
hgt(xk) =
sup
(
)
[27]Z z
z
k
X
µ
∈
}
{
(
)
hgt(
)
inf
*
k x
Z z
x
z
Z
z
z
k
=
∈
=
∈
µ
[28]An alternative to this method is called the last of maxima, and it is given by,
}
{
(
)
hgt(
)
sup
*
k x
Z z
x
z
Z
z
z
k
=
∈
=
∈
µ
[29]sup : supremum (is the least upper bound), inf : infimum (is the greatest lower bound).
1
µ
z
z*
Figure 7. shows procedure for centroid defuzzification. The figure shows that the input variable e satisfies both membership function CL and NR at value 0.7 and 0.3 respectively. Whereas, input variable ∆e only satisfies membership function NU at value 0.4. After using correlation minimum encoding technique to do inferencing, the membership value of output variable ∆Z are 0.4 at membership function NO and 0.3 at membership function LF.
Input fuzzy variables Output fuzzy variable
NO
µ∆e
µe
Centroid
µ∆Z
LF NO
0.3 0.4
0.3
0.3 0.4
NU
NR LF
∆Z
∆
e
e
µ∆Z
0.4 0.4
0.7
NU CL
∆Z
∆
e
e
µ∆Z
µ∆e
µe
∆Z
The following example shows how fuzzy logic technology can be developed for an air conditioner temperature control system of the process block diagram of the control system is shown in Figure 1.
Fuzzy
Controller
Error (e)
Change of Motor Speed
(
∆
Z)
Derivative of error (
∆
e)
Figure 8. Configuration of the fuzzy controller
There are two inputs and one output to the fuzzy controller as shown in Figure 8. Suppose the inputs i.e., error (e) and derivative of error (∆e) ranges from –2 to 2 OC respectively while the output, i.e., change of compressor motor speed (∆Z) ranges from – 50 to 50 rpm.
The performance measurement is as follows :
e(k) = set point(k) – y(k) [30]
∆e(k) = e(k) – e(k – 1) [31]
Z(k) = Z(k – 1) + ∆Z(k) [32]
where y(k) is the actual speed at time k, and Z(k) is the manipulated output variable at time k.
For the fuzzification of fuzzy controller, each input and output in the fuzzy model is quantized into fuzzy subsets. Table 1., shows how fuzzy variable being quantized into fuzzy subsets and labeled. Then, membership functions need to be developed. For computational simplicity, we use triangular membership function as shown in Figure 4. The next step is to develop fuzzy If – Then form to control the process. For example, If error in temperature is about VC (very cold) and derivative of error is about NL (negative large) Then the change of compressor motor speed is about VS (very small), i.e. :
If (e = VC And ∆e = NL) Then ∆Z = VS
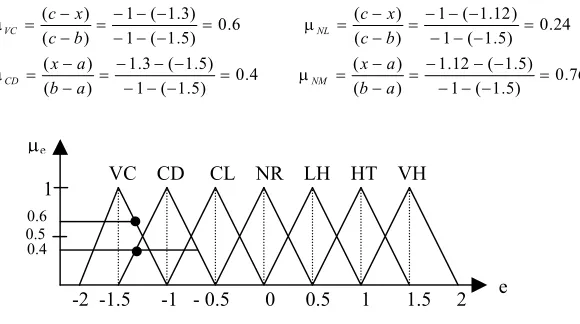
A 49 bank matrix as shown in Table 2., is used for simplicity to observe the developed fuzzy rules. Therefore, if given : e = -1.3 oC and ∆e = -1.2 oC. Value of e = -1.3 oC satisfies two membership functions i.e. VC and CD with the value of membership as shown in Figure 9. Whereas, value of ∆e = -1.2 oC satisfies two membership functions i.e. NL and NM with the value of membership as shown in Figure 10. 76 . 0 ) 5 . 1 ( 1 ) 5 . 1 ( 12 . 1 ) ( ) ( 4 . 0 ) 5 . 1 ( 1 ) 5 . 1 ( 3 . 1 ) ( ) ( 24 . 0 ) 5 . 1 ( 1 ) 12 . 1 ( 1 ) ( ) ( 6 . 0 ) 5 . 1 ( 1 ) 3 . 1 ( 1 ) ( ) ( = − − − − − − = − − = = − − − − − − = − − = = − − − − − − = − − = = − − − − − − = − − = a b a x a b a x b c x c b c x c NM CD NL VC µ µ µ µ
0.4 0.5 0.6
-2 -1.5 -1 - 0.5 0 0.5 1 1.5 2 1
µe
VC CD CL NR LH HT VH
e
Figure 10. Value of membership which satisfied by ∆e = -1.2 oC
After developing the fuzzy rules, correction minimum encoding technique is used to do inferencing. The results are summarized as below :
1. If e = VC µVC (0.6) And ∆e = NL µNL (0.24) Then∆Z = VS µVS (0.24)
2. If e = VC µVC (0.6) And ∆e = NM µNM (0.76) Then∆Z = SL µSL (0.6)
3. If e = CD µCD (0.4) And ∆e = NL µNL (0.24) Then∆Z = VS µVS (0.24)
4. If e = CD µCD (0.4) And ∆e = NM µNM (0.76) Then∆Z = SL µSL (0.4)
where,
∆Z = VS µVS (0.24) and ∆Z = SL µSL (0.6)
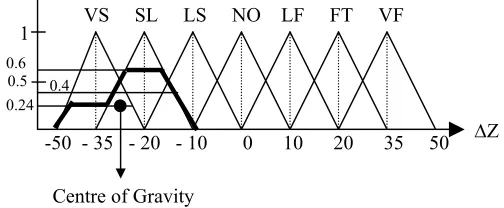
Finally, the output fuzzy set is converted into a numerical solution variable using Centroid defuzzification. Figure 11., shows the function of the output satisfied by the given e and ∆e value. Therefore, the centroid is obtained as :
Rpm
29
.
24
6
.
0
24
.
0
6
.
0
*
)
20
(
24
.
0
*
)
35
(
−
=
+
−
+
−
=
Z
∆
That means compressor motor should decreases its speed to 24.29 rpm.
∆Z 0.24
0.4 0.6 0.5
-50 - 35 - 20 - 10 0 10 20 35 50 1
µ∆Z
VS SL LS NO LF FT VF 0.24
0.76 0.5
-2 -1.5 -1 - 0.5 0 0.5 1 1.5 2 ∆e 1
µ∆e
NL NM NS NU PS PM
PL
Centre of Gravity
Figure 11. Output of compressor motor
5. Concluding Remarks
Our mathematical characterization served to show how the fuzzy logic control can handle more inputs and outputs, the range of possibilities for the definition on universes of discourse, the membership functions, the rules, the inference mechanism, and defuzzification methods.
6. Acknowledgements
The author acknowledge support provided by Bung Hatta University and Universiti Teknolgi Malaysia for this research. We have to thank Prof. Madya Dr. Hishamuddin Jamaluddin, Fluid and Thermal Laboratory of Faculty Mechanical Engineering and to all members of Associate Student of Indonesia in Malaysia.
7. References
[1] Henry Nasution (2002). Fuzzy Logic for Air Conditioner, of a Report by the Faculty of Mechanical Engineering Universiti Teknologi Malaysia.
[2] __________________ (2002). “An Introduction to Fuzzy Logic Control.” Bung Hatta University. [3] __________________ (2003). Overview of Fuzzy Logic Control, of a Report by the Faculty of
Mechanical Engineering Universiti Teknologi Malaysia.
[4] Altrock, Constantin Von (1995). “Fuzzy Logic & NeuroFuzzy Applications Explained.” New Jersey : Prentice Hall.
[5] Bojadziev, George and Bojadziev, Maria (1998). “Fuzzy Sets, Fuzzy Logic, Applications.” Singapore : World Scientific.
[6] Carvajal, J., Chen, Guanrong and Ogmen, Haluk (2000). “ Fuzzy PID Controller : Design Performance Evaluation, and Stability Analysis.” Information Sciences. 123. 249-270.
[7] Huang, S. and Nelson, R. M. (1991). “ A PID Law Combining Fuzzy Controller for HVAC Applications.” ASHRAE Transactions 97. 2. 768-774.
[8] _________________ (1994). “ Rule Development and Adjustment Strategies of A Fuzzy Logic Controller for an HVAC System : Part One – Analysis.” ASHRAE Transactions 100. 1. 841-850.
[9] _________________ (1994). “ Rule Development and Adjustment Strategies of A Fuzzy Logic Controller for an HVAC System : Part Two – Experiment.” ASHRAE Transactions 100. 1. 851-856.
[10] Jamshidi, Mohammad, Vadiee, Nader and Ross, Timothy J. (1993). “Fuzzy Logic and Control.” New Jersey : Prentice Hall.
[11] Klir, George J., and Bo, Yuan (1996). “ Fuzzy Sets, Fuzzy Logic, And Fuzzy Systems.” Singapore : World Scientific.
[12] Lim, Huey Yi (1998). “ On-Line Fuzzy Control for Motor Control.” Universiti Teknologi Malaysia : Degree Thesis.
[13] Li-Xin, Wang (1997). “ A Course in Fuzzy Systems and Control.” United State of America : Prentice Hall.
[14] Masjuki Khalid (1996). “ A Hand On Fuzzy Logic.” Universiti Teknologi Malaysia.
[15] Ong, Song Ping (1999). “On Line Fuzzy Logic Control.” Universiti Teknologi Malaysia : Degree Thesis.
[16] Passino, Kevin M., and Yurkovich, Stephen (1998). “Fuzzy Control.” California : Addison Wesley.
[17] Reznik, Leonid (1997). “Fuzzy Controller.” Oxford : Newnes.
[18] Ross, Timothy J. (1997). “ Fuzzy Logic With Engineering Applications.” Singapore : McGraw Hill.
[19] The Math Works (2001). “Fuzzy Logic Toolbox for Use With Matlab.”
[20] Tsoukalas, Lefteri H., and Uhrig, Robert E. (1997). “Fuzzy and Neural Approach In Engineering.” United States of America : John Wiley & Sons.
[21] Yen, John., Langari, Reza., and Zadeh, Lotfi A. (1995). “ Industrial Applications of Fuzzy Logic and Intelligent Systems.” In. Mohammad Jamshidi. “ On Fuzzy Control of Nonchlorofluorocarbon Air Conditioning Systems.” New York : IEEE Press.