LOMBA KOMPETENSI SISWA SEKOLAH MENENGAH KEJURUAN
TINGKAT NASIONAL XXVI
TAHUN 2018
Kisi-Kisi
Bidang Lomba
MOBILE ROBOTICS
KEMENTERIAN PENDIDIKAN DAN KEBUDAYAAN
DIREKTORAT JENDERAL PENDIDIKAN DASAR DAN MENENGAH
DIREKTORAT PEMBINAAN SEKOLAH MENENGAH KEJURUAN
DESKRIPSI UMUM MOBILE ROBOTICS
1. Nama dan Deskripsi Kompetensi
1.1. Nama bidang lomba adalah mobile robotics.
1.2. Jenis yang dilombakan pada mobile robotics adalah aktivasi dan pemrograman
robot.
1.3. Syarat peserta adalah siswa SMK yang sesuai dengan jurusan (seperti: listrik,
elektronika, rekayasa perangkat lunak) yang minimal telah mengetahui pelajaran
dasar-dasar pemrograman dan sistem komputer. Pengoperasian komputer adalah
mutlak diperlukan.
1.4. Kompetisi mengunakan robot Robotino dari Festo yang hanya disediakan dalam
jumlah yang sangat terbatas oleh panitia. Bagi SMK yang mempunyai Robotino,
WAJIB untuk membawa dan menggunakannya dalam pertandingan.
1.5. Gripper atau forklift atau apapun namanya dan bentuknya serta kemampuannya
menjadi tanggung jawab masing-masing tim. Panitia sama sekali TIDAK
menyediakan pengadaan gripper atau forklift.
1.6. Kompetisi dilakukan secara tim. Setiap provinsi hanya boleh mengirimkan 1 tim
yang terdiri dari 2 siswa.
2. Ruang Lingkup Kompetensi
Peserta harus mampu:
2.1. Membuat program untuk Robotino dengan BLOCK DIAGRAM (Program bernama
Robotino View yang dapat di download di www.festo-didactic.com). Program dapat
dijalankan pada komputer yang minimal berbasis Windows XP SP2. Komunikasi
antara Robot dengan Komputer menggunakan WiFi.
2.2. Menjalankan robot sesuai dengan aturan lomba.
2.3. Mengatur taktik dan strategi agar robot dapat menyelesaikan tugas sesuai soal dan
menyelesaikannya dalam waktu yang paling singkat.
2.4. Memahami fungsi dan sistem kerja sensor, sistem kendali dan aktuator yang ada
pada robot Robotino.
2.5. Mampu mendesain, membuat dan mengoperasikan gripper atau forklift atau
apapun bentuk dan kemampuannya dan meninstallnya di Robotino untuk
3. Sistem Perlombaan
3.1. Setiap peserta lomba harus mempunyai dedikasi tinggi untuk membuat program
sendiri dan menjunjung tinggi sportifitas.
3.2. Setiap peserta hams membawa laptop dan diperbolehkan membawa 2 Laptop
serta sebuah flashdisk ke ruangan lomba, Laptop dan flasdisk TIDAK BOLEH
berisi fileprogram RobotinoView (*.rvw2). Checking akan dilakukan di awal dan
akan diberi tanda oleh Panitia.
3.3. Selama lomba berlangsung, laptop dan flashdisk yang digunakan selama lomba
TIDAK diperkenankan dibawa pulang. Panitia TIDAK bertanggung jawab akan
Operating System dan aplikasi yang ada pada masing-masing laptop peserta.
3.4. Setiap peserta bertanggung jawab atas kelengkapan dari robot selama waktu
pemakaian.
3.5. Seluruh tim akan mendapatkan pengarahan dan berdiskusi dengan pembimbing
selama 15 menit sebelum kompetisi dimulai.
3.6. Peserta dapat memulai kompetisi setelah pengawas menyatakan kompetisi
dimulai.
3.7. Peserta diberikan waktu 30 menit untuk persiapan.
3.8. Soal terdiri dari 2 macam lomba. Soal pertama akan diselesaikan pada hah
pertama dan soal kedua akan diselesaikan pada hah kedua.
3.9. Soal yang diberikan pada saat lomba akan sedikit berbeda dengan yang
diberikan
pada kisi-kisi lomba untuk memberikan tantangan utamanya kecerdasan
pemrograman dengan tidak mengubah aksesoris yang diberikan pada kisi-kisi,
misalkan penambahan jumlah target, perubahan posisi Home atau Start.
3.10. Untuk masing-masing soal, peserta mendapatkan hak untuk mencoba Robotino
pada media lomba selama persiapan berlangsung maksimum 4 x @10 menit
secara bergiliran.
3.11. Pada saat dewan juri telah menyatakan waktu persiapan telah selesai, peserta
tidak diperbolehkan berada di media lomba dan mengubah program yang sudah
ada.
3.12. Pemenang kompetisi ditentukan dari jumlah nilai gabungan kedua macam lomba.
4. Arena Lomba
Arena lomba mempunyai dimensi 2400mm x 3600mm dan dikelilingi dinding setinggi
100mm. Arena terbuat dari multipleks dengan tebal 20mm yang dilapisi melamin
warna
5. Penilaian Akhir
Pemenang adalah tim dengan total point terbesar. Point didapat dari total nilai dari dua
soal yang diberikan. Apabila ada kesamaan point maka pemenang maka penentuan
mengikuti prioritas berikut:
• Perolehan score terbanyak dari seluruh pertandingan
• Total waktu tercepat dalam seluruh pertandingan
a. Perlengkapan
Disediakan oleh panitia lomba
o Arena lintasan lomba dan aksesorisnya o Jaringan kabel listrik untuk setiap tim o Pembatas arena (tali) dengan penonton o Pembersih arena (vaccum cleaner, lap dsb) o LCD dan layar
o Stop watch o Kicking device o Shooting stick
Disediakan oleh peserta
o Mobile Robotic, ROBOTINO
o Software Robotino View yang sudah terinstall di laptop atau PC dengan koneksi WiFi dan USB
o Baterai cadangan 2 buah @12v, 4 Ah o Kabel LAN straight sepanjang 5m o Tool set
■ 200 mm steel ruler
■ Side cutter
■ Lead end sleeve pliers
■ Screwdriver set, hex, 1.5 - 6
■ Screwdriver, hex, 0.9; 1.3
■ Screwdriver, cross-head, PZ02 - short
■ Screwdriver, flat, 2.5 x 75; 4.0 x 100
■ Screwdriver, flat, 1.2 - 1.6
b. Jadwal Perlombaan
Lomba akan dilaksanakan dalam 3 hari dimulai antara jam 08.30 - 17.00
• Hari ke-0 : Technical Meeting, Familiarisasi Alat dan Latihan
• Hari ke-1 : Pembukaan, Kompetisi dan Penilaian Soal 1.
• Hari ke-2 : Kompetisi dan Penilaian Soal 2.
Marking Scheme
Kriteria
Persentase
A
Manajemen dan Organisasi Kerja
10%
B
Komunikasi dan Kemampuan individu
10%
C
Pembuatan, Perakitan dan Pengkabelan
20%
D
Memprogram, Menguji dan Penyesuaian
25%
E
Performance Review
35%
A.
Manajemen dan Organisasi Kerja
Penilaian meliputi:
Perilaku dalam kerjasama dengan rekan satu tim di dalam dan luar arena
pelombaan.
Kerapian dari tempat kerja (misal: pitstop).
Perilaku dalam bekerja sama dengan peserta lain.
Ketepatan waktu dalam menyelesaikan merakit dan membangun robot.
B.
Komunikasi dan Kemampuan individu
Penilaian meliputi:
Penyampaian ide disain robot baik sisi mekanik, elektronik dan kendali.
C.
Pembuatan, Perakitan dan Pengkabelan
Penilaian meliputi:
Pengujian Sensor dan Aktuator
o
Pengujian Motor.
o
Pengujian Distance Sensor.
o
Pengujian Line Sensor.
o
Pengujian Kamera.
o
Pengujian Lift.
Pengujian Gerakan Dasar Robot
o
Gerakan robot maju mengikuti garis.
o
Gerakan robot mundur mengikuti garis.
o
Gerakan robot berputar 360
0didalam 600mm x 600mm.
o
Gerakan dengan odometry
.
D.
Memprogram, Menguji dan Penyesuaian
Penilaian meliputi:
Objek Manajemen Sistem
E.
Performance Review
Test Project 1. Smart Choice (
Performance Review
)
1. Diskripsi Perlombaan
1.1 Project ini merupakan illustrasi dari sebuah sinkronisasi Sequential Dropping
menjatuhkan benda kerja atau workpiece dari suatu Port yang telah ditetapkan
menuju Target yang dituju yang sesuai dengan nomor urut (sekuensial).
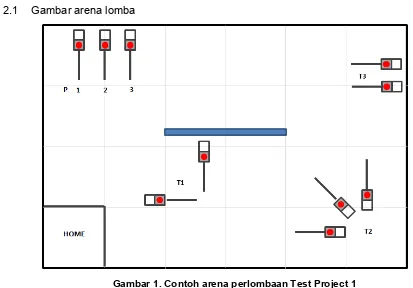
1.2 Robotino yang telah dipasangi dengan lance tool, start dari Home kemudian menuju
Port nomor 1 kemudian menjatuhkan benda kerja / workpiece di atas stand box ke
dalam drop box di port tersebut. Robotino kemudian menuju Target 1 dan
menjatuhkan benda kerja di atas standbox ke dalam drop box di target tersebut.
Demikian berturut-turut kemudian dilanjutkan dengan Port 2, Target 2, Port 3 dan
terakhir Target 3 dan kembali ke Home.
1.3 Di atas standbox pada Target, ada dua jenis workpiece: warna merah dan warna
silver. Robotino harus menjatuhkan workpiece berwarna merah saja, seandainya
menjatuhkan workpiece berwarna silver ke dalam dropbox, maka ada penalty berupa
pengurangan point.
1.4 Hanya kepada Tim yang mengerjakan dengan sempurna saja yang akan
mendapatkan bonus performance time 5% dari nilai keseluruhan.
2. Arena dan Objek Lomba
2.1 Gambar arena lomba
2.2 Arena lomba mempunyai dimensi 2400mm x 3600mm dan dikelilingi dinding setinggi
100mm dengan tebal 20mm. Arena terbuat dari multipleks dengan tebal 20mm yang
dilapisi melamin warna putih mengkilap.
2.3 Arena lomba mempunyai zona start robot dengan dimensi 600mm x 600mm yang
dibatasi oleh garis hitam dengan lebar 15mm.
2.4 Layout arena kompetisi dapat berubah minimal 30% baik dalam jumlah port dan
target dengan tidak mengubah dimensi standbox.
2.5 Aksesoris arena terdiri dari:
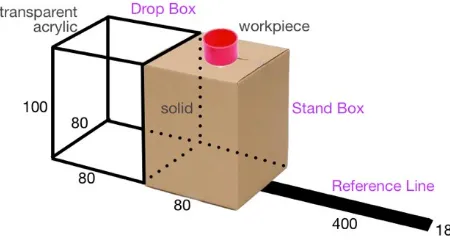
2.5.1 StandBox : Berbentuk balok, dimensi 80mm x 80mm x 100mm. Terbuat dari
acrilyc warna gelap.
2.5.2 DropBox : Berbentuk balok, dimensi 80mm x 80mm x 90mm. Terbuat dari
acrilyc transparan dengan bagian atas terbuka.
2.5.3 Workpiece / Benda Kerja : Berbentuk silinder. Dimensi diameter 40mm x tinggi
20mm, terbuat dari plasik. Ada dua warna workpiece atau benda kerja yakni
merah dan silver.
2.5.4 Reference Line : Garis hitam yang terbuat dari isolasi hitam dengan dimensi
18mm x 400mm. Terletak searah dengan standbox dan dropbox.
2.5.5 Obstacle : Berbentuk balok, dimensi 40mm x 100mm x 500mm, terbuat
multiplex yang dilapisi melamin warna putih.
Gambar 2. StandBox, DropBox, ReferenceLine dan Workpiece
3. Robot
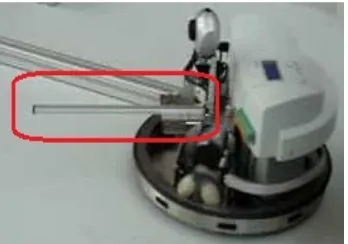
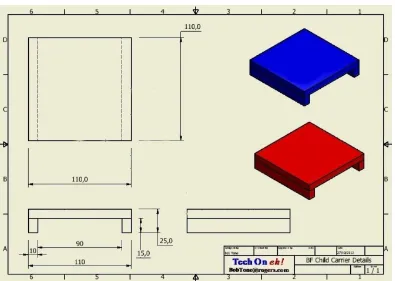
3.1 Robot adalah Robotino dari Festo yang dilengkapi dengan Lancetool. Robotino dan
lancetool DISEDIAKAN SENDIRI oleh masing-masing Tim peserta, BUKAN menjadi
Gambar 3. Robotino dengan LanceTool
4. Perlombaan dan Penilaian
4.1
Performance Review
4.1.1 Pernampilan dilakukan dalam 5 menit.
4.1.2 Robot dijalankan hanya dengan menekan SATU TOMBOL START. Penekanan
tombol dilakukan oleh anggota tim. Selama pertandingan, anggota tim tidak
boleh menyentuh robot maupun laptop/komputernya kecuali meminta retry.
4.1.3 Robot menyelesaikan tugasnya yaitu memasukkan workpiece ke dalam
dropbox secara berurutan, yaitu dari Port 1 ke Target 1 selanjutnya Port 2 ke
Target 2 dan begitu seterusnya.
4.1.4 Di masing-masing Target ada dua atau tiga Standbox dengan hanya 1 (satu)
workpiece saja yang akan diletakkan sesaat sebelum Start. Jenis Target akan
ditentukan berdasarkan undian pada pagi hari lomba dan dapat dilihat di
gambar di bawah ini.
Gambar 4. Jenis Target dengan dua atau tiga Standbox dan Dropbox.
4.2 Penilaian
4.2.2 Robot berhasil menjatuhkan workpiece ke dalam dropbox sesuai dengan urutan
Port dan Target nya akan mendapatkan point 12 untuk setiap dropboxnya.
4.2.3 Robot berhasil memasukkan workpiece ke dalam dropbox yang TIDAK SESUAI
dengan urutan HANYA akan mendapat point 2.
4.2.4 Pada setiap Target, hanya ada SATU workpiece yang berwarna merah dan
yang lainnya berwarna silver. Letak workpiece berwarna merah akan ditentukan
sesaat sebelum peluit dimulainya Marking atau penilaian.
4.2.5 Robot hanya menjatuhkan workpiece warna MERAH saja, dan seandainya
workpiece warna silver jatuh ke dalam Dropbox, maka akan ada pengurangan
nilai atau point.
4.2.6 Setelah melakukan semua tugas robot kembali ke Home dan berhenti akan
mendapatkan point 10.
4.2.7 Point WAKTU sebesar 10 hanya akan didapatkan jika robot berhasil dengan
menjatuhkan semua workpiece ke dalam dropbox sesuai dengan urutan yang
benar dan robot kembali lagi ke Home.
4.2.8 Perhitungan point waktu ditentukan sbb:
Point waktu = (max – aktual) / (max-min) x 10
Dimana:
Max : waktu terlama dari seluruh tim
Min : waktu tercepat dari seluruh tim
Aktual : waktu yang diperoleh tim tersebut
5. Retry
5.1 Retry adalah mengembalikan robot pada posisi start di Home dan seluruh workpiece
akan kembali ke posisi semula. Stopwatch akan tetap berjalan.
5.2 Point yang didapat sebelum retry kembali di-nol-kan.
5.3
Retry hanya diijinkan SEKALI saja pada setiap penilaian.
6. Penalty dan Diskualifikasi
6.1 Penalti akan diberikan kepada Tim yang menggeser properti lapangan.
Test Project 1 :
Smart Choice
Tugas Point Score
Run 1 Run 2 Run 3
Keluar Home 8
Port 1
Menyentuh Workpiece 5
Menjatuhkan Workpiece ke dalam Drop Box 7
Target 1
Menyentuh Workpiece 5
Menjatuhkan Workpiece ke dalam Drop Box 7
Port 2
Menyentuh Workpiece 5
Menjatuhkan Workpiece ke dalam Drop Box 7
Target 2
Menyentuh Workpiece 5
Menjatuhkan Workpiece ke dalam Drop Box 7
Port 3
Menyentuh Workpiece 5
Menjatuhkan Workpiece ke dalam Drop Box 7
Target 3
Menyentuh Workpiece 5
Menjatuhkan Workpiece ke dalam Drop Box 7
Kembali ke HOME 10
Jumlah 0 0 0
Test Project 2. Material Handling Management
(
Performance Review)
1. Diskripsi Perlombaan
1.1 Project ini merupakan illustrasi dari sebuah robot yang ditugaskan untuk
mengirimkan object atau barang yang berada di atas pallet dengan spesifikasi
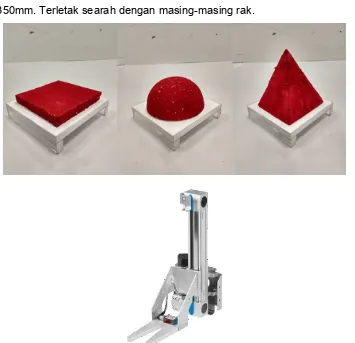
perbedaan warna (merah; hijau; biru) dan bentuk (kotak/tipis; bola/agak tebal;
piramid/tebal). Jadi ada 9 objek yang berbeda yang harus dikirim sesuai dengan
tempatnya ke dalam almari penyimpanan sesuai warna dan rak nya.
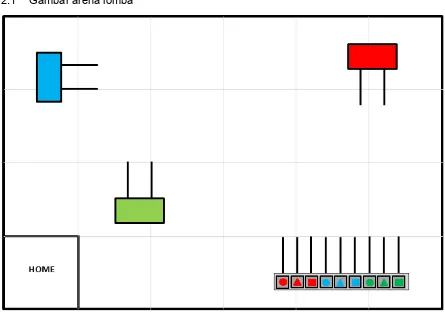
1.2 Satu lapangan dibagi untuk 2 tim. Lapangan akan berbentuk cermin satu dengan
yang lain. Setiap lapangan akan terdiri dari 3 almari dengan warna berbeda, terminal
tempat menempatkan 9 objek ayng ditempatkan masing-masing melekat dengan
palletnya. 5 pallet pertama ditempatkan fixed di terminal, sedangkan 4 pallet yang
berikutnya diundi sesaat sebelum marking atau penilaian dimulai.
1.3 Robot start dari Home kemudian menuju terminal untuk mengambil pallet untuk
ditempatkan ke dalam almari sesuai warna dan bentuknya dengan tepat.
2. Arena dan Objek Lomba
2.1 Gambar arena lomba
2.2 Arena lomba mempunyai dimensi 2400mm x 3600mm dan dikelilingi dinding setinggi
100mm dengan tebal 20mm. Arena terbuat dari multipleks dengan tebal 20mm yang
dilapisi melamin warna putih mengkilap.
2.3 Arena lomba mempunyai zona start robot dengan dimensi 600mm x 600mm yang
dibatasi oleh garis hitam dengan lebar 15mm.
2.4 Aksesoris arena terdiri dari:
2.4.1 Pallet : Berbentuk segi empat berukuran sisi 110mm dengan ketinggian kaki 15mm,
tebal pallet 10mm. Melekat bersama setiap pallet adalah objek berbentuk
segiempat dengan ketebalan 10mm, objek berbentuk bola terpotong dengan
ketebalan 35mm dan objek berbentuk piramid dengan ketinggian 60mm. Objek
sesuai dengan bentuk dan warnanya berjumlah 9 buah.
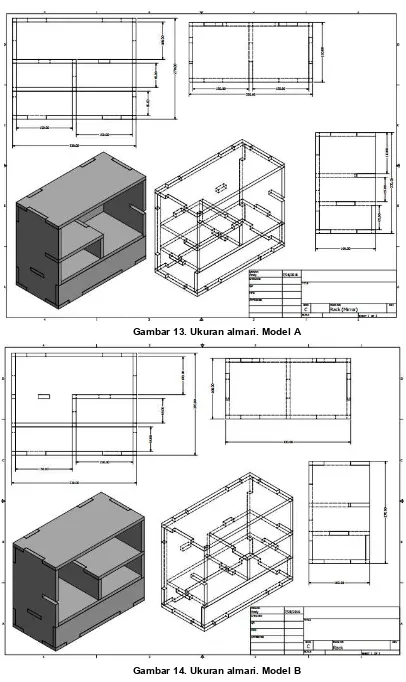
2.4.2 Almari : Berbentuk Balok tanpa tutup atas (bagian atas di biarkan terbuka). Terbuat
dari acrilyc bening. Rak dapat disusun berada di sebelah kiri atau kanan. Rak
berwarna merah, hijau dan biru pada sisi dasar mengelilinginya. Rak almari dapat
dipindahkan baik di sebelah kanan atau kiri.
2.4.3 Reference Line : Garis hitam yang terbuat dari isolasi hitam dengan dimensi 18mm
x 350mm. Terletak searah dengan masing-masing rak.
Gambar 11. Almari dengan penempatan pallet pada rak di sebelah kiri dan sebelah kanan. Perhatikan bahwa penempatan objek TIDAK dapat dipindahkan ke rak lain.
Gambar 13. Ukuran almari. Model A
3. Robot
Robot adalah Robotino dari Festo yang dilengkapi dengan forklift. Robotino dan forklift
DISEDIAKAN SENDIRI oleh masing-masing Tim peserta, BUKAN menjadi tanggung
jawab penyelenggara.
4. Perlombaan dan Penilaian
4.1. Perlombaan
4.1.1. Perlombaan dilakukan dalam waktu 9 menit.
4.1.2. Robot dijalankan hanya dengan menekan SATU TOMBOL START.
Penekanan tombol dilakukan oleh anggota tim. Selama pertandingan,
anggota tim tidak boleh menyentuh robot maupun laptop/komputernya
kecuali meminta retry.
4.1.3. Robot menyelesaikan tugasnya yaitu mengambil pallet dari pallet station
untuk dibawa menuju almari sesuai dengan warna dan raknya mengikuti
bentuk objeknya.
4.2. Penilaian
4.2.1. Robot hanya dapat menyentuh pallet mendapat point 4 saja.
4.2.2. Robot berhasil mengambil pallet pada pallet station mendapat point 10.
4.2.3. Robot berhasil meletakkan pallet dengan tidak sempurna (tidak sesuai
warna dan raknya) pada almari yang ditentukan mendapat point 4.
4.2.4. Robot berhasil meletakkan pallet dengan sempurna pada almari yang
ditentukan mendapat point 10.
4.2.5. Point waktu didapat jika robot berhasil dengan meletakkan semua pallet
dengan sempurna pada almari yang telah ditentukan dan pada raknya.
4.2.6. Perhitungan point waktu ditentukan sbb:
Point waktu = (max – aktual) / (max-min) x 10
Dimana:
Max : waktu terlama dari seluruh tim
Min : waktu tercepat dari seluruh tim
Aktual : waktu yang diperoleh tim tersebut
5. Retry
5.1. Retry adalah mengembalikan robot pada posisi start dan seluruh pallet akan kembali
5.2. Point yang didapat sebelum retry kembali di-NOL-kan.
5.3. Retry hanya diijinkan SEKALI saja pada setiap penilaian.
6. Penalty dan Diskualifikasi
6.1 Penalti pengurangan 5 point jika robot menggeser almari.
6.2 Diskualifikasi apabila peserta atau robot merusak properti lomba.
Test Project 3 :
Material Handling Management
Tugas Point Score
Run 1 Run 2 Run 3
Hanya menyentuh palet @4
Mengambil palet @10
Meletakkan palet @10
Jumlah 0 0 0
Criteria
Sub Criteria
Name or Description
Aspect Type M = Mes
J = Judg*
Aspect - Description Judg Score WSSS Section Max Mark
Criterion
A
Total
Mark
10.00
A1 Managemen dan
Organisasi kerja M
Perilaku dalam kerjasama dengan rekan satu tim di dalam dan luar
arena pelombaan
1 2
A2 Managemen dan
Organisasi kerja J
Kerapian dari tempat kerja (misal: pitstop).
1 3
A3 Managemen dan
Organisasi kerja M
Perilaku dalam bekerja sama dengan
peserta lain 1 2
A4 Managemen dan
Organisasi kerja M
Ketepatan waktu dalam menyelesaikan merakit dan
membangun robot
1 3
Sub Criteria
ID
Sub Criteria
Name or Description
Aspect Type M = Mes J = Judg
Aspect - Description Judg Score WSSS Section Max Mark
Criterion
B
Total
Mark
10.00
B1 Communication and
Interpersonal Skills J Presentasi Disain Mekanik 2 3
B2 Communication and
Interpersonal Skills J Presentasi Disain Elektronik 2 3
B3 Communication and
Interpersonal Skills J Presentasi Disain Sistem Kendali 2 4
Sub Criteria
ID
Sub Criteria
Name or Description
Aspect Type M = Mes J = Judg
Aspect - Description Judg Score WSSS Section Max Mark
Criterion
C
Total
Pembuatan, Perakitan dan
Pengkabelan
Pengujian Sensor dan
Aktuator
C1 Pengujian Motor M 3 1
C2 Pengujian Sensor Distance M 3 1
C3 Pengujian Line Sensor M 3 2
C4 Pengujian Kamera M 3 2
C5 Pengujian Lift M 3 2
Gerakan Dasar Robot
C6 Gerakan robot maju
mengikuti garis M 3 3
C7 Gerakan robot mundur
mengikuti garis. M 3 3
C8
Gerakan robot berputar 3600 didalam 600mm x 600mm
M
3 3
C9 Gerakan dengan odometry M 3 3
Sub Criteria
ID
Sub Criteria
Name or Description
Aspect Type M = Mes J = Judg
Aspect - Description Judg Score WSSS Section Max Mark
Criterion
D
Total
Mark
25.00
Memprogram, Menguji dan
Penyesuaian
D1 Memasukan workpiece ke
dalam kotak M 4 0.5
D2 Mengambil dan
Mengangkat palet M 4 0.5
D3 Meletakkan palet bola M 4 2
D4 Meletakkan palet Persegi M 4 2
D5 Meletakkan palet Piramid M 4 2
D6 Mengenali bentuk Bola M
4 3
D7 Mengenali bentuk Piramid. M
4 3
D8 Mengenali bentuk Persegi. M 4 3
D9 Mengenali warna Biru. M 4 3
D10 Mengenali warna Merah. M 4 3
D11 Mengenali warna Hijau M 4 3
Sub Criteria
ID
Sub Criteria
Name or Description
Aspect Type M = Mes J = Judg
Aspect - Description Judg Score WSSS Section Max Mark
Criterion
E
Total
Mark
35.00
E1 Performance Review Test
Run 1
M Keluar Home 5 0.2
M Menyentuh Workpiece Port 1 5 0.4
M Menjatuhkan Workpiece ke dalam
Drop Box Port 1 5 0.7
M Menjatuhkan Workpiece ke dalam
Drop Box Port 2 5 0.7
M Menyentuh Workpiece Port 3 5 0.4
M Menjatuhkan Workpiece ke dalam
Drop Box Port 3 5 0.7
M Menyentuh Workpiece Port 4 5 0.4
M Menjatuhkan Workpiece ke dalam
Drop Box Port 4 5 0.7
M Menyentuh Workpiece Port 5 5 0.4
M Menjatuhkan Workpiece ke dalam
Drop Box Port 5 5 0.7
M Menyentuh Workpiece Port 6 5 0.4
M Menjatuhkan Workpiece ke dalam
Drop Box Port 6 5 0.7
M Kembali ke HOME 5 0.2
M Waktu 0.5
E2 Performance Review Test
Run 2
M Keluar Home 5 0.2
M Menyentuh Workpiece Port 1 5 0.4
M Menjatuhkan Workpiece ke dalam
Drop Box Port 1 5 0.7
M Menyentuh Workpiece Port 2 5 0.4
M Menjatuhkan Workpiece ke dalam
Drop Box Port 2 5 0.7
M Menyentuh Workpiece Port 3 5 0.4
M Menjatuhkan Workpiece ke dalam
Drop Box Port 3 5 0.7
M Menjatuhkan Workpiece ke dalam
Drop Box Port 4 5 0.7
M Menyentuh Workpiece Port 5 5 0.4
M Menjatuhkan Workpiece ke dalam
Drop Box Port 5 5 0.7
M Menyentuh Workpiece Port 6 5 0.4
M Menjatuhkan Workpiece ke dalam
Drop Box Port 6 5 0.7
M Kembali ke HOME 5 0.2
M Waktu 0.5
E3 Performance Review Test
Run 3
M Menyentuh Palet 1 5 0.2
M Mengambil Palet 1 5 0.3
M Meletakkan Palet 1 5 0.5
M Menyentuh Palet 2 5 0.2
M Mengambil Palet 2 5 0.3
M Meletakkan Palet 2 5 0.5
M Menyentuh Palet 3 5 0.2
M Mengambil Palet 3 5 0.3
M Meletakkan Palet 3 5 0.5
M Menyentuh Palet 4 5 0.2
M Mengambil Palet 4 5 0.3
M Meletakkan Palet 4 5 0.5
M Menyentuh Palet 5 5 0.2
M Mengambil Palet 5 5 0.3
M Meletakkan Palet 5 5 0.5
M Menyentuh Palet 6 5 0.2
M Mengambil Palet 6 5 0.3
M Menyentuh Palet 7 5 0.2
M Mengambil Palet 7 5 0.3
M Meletakkan Palet 7 5 0.5
M Menyentuh Palet 8 5 0.2
M Mengambil Palet 8 5 0.3
M Meletakkan Palet 8 5 0.5
M Menyentuh Palet 9 5 0.2
M Mengambil Palet 9 5 0.3
M Meletakkan Palet 9 5 0.5
M Waktu 5 1
E4 Performance Review Test
Run 4
M Menyentuh Palet 1 5 0.2
M Mengambil Palet 1 5 0.3
M Meletakkan Palet 1 5 0.5
M Menyentuh Palet 2 5 0.2
M Mengambil Palet 2 5 0.3
M Meletakkan Palet 2 5 0.5
M Menyentuh Palet 3 5 0.2
M Mengambil Palet 3 5 0.3
M Meletakkan Palet 3 5 0.5
M Menyentuh Palet 4 5 0.2
M Mengambil Palet 4 5 0.3
M Meletakkan Palet 4 5 0.5
M Menyentuh Palet 5 5 0.2
M Mengambil Palet 5 5 0.3
M Meletakkan Palet 5 5 0.5
M Menyentuh Palet 6 5 0.2
M Mengambil Palet 6 5 0.3
M Menyentuh Palet 7 5 0.2
M Mengambil Palet 7 5 0.3
M Meletakkan Palet 7 5 0.5
M Menyentuh Palet 8 5 0.2
M Mengambil Palet 8 5 0.3
M Meletakkan Palet 8 5 0.5
M Menyentuh Palet 9 5 0.2
M Mengambil Palet 9 5 0.3
M Meletakkan Palet 9 5 0.5
M Waktu 5 1