Seminar Nasional dan Gelar Produk | SENASPRO 2017 299
PERBAIKAN
PERFORMANCE
KENDALI KECEPATAN MOTOR
BRUSHLESS
DC (BLDC) DENGAN PENGENDALI LOGIKA FUZZY
Mirza Zoni1, Hidayat2, Hidayattullah3
1,2,3
Teknik Elektro Universitas Bung Hatta Padang
1,2,3Kampus III. Jl. Gajah Mada No.19 Gunung Pangilun Padang
1)[email protected], 2)[email protected], 3)[email protected]
Abstrak
Motor brushless DC (BLDC) banyak digunakan dalam industri karena memiliki kelebihan dari motor penggerak lainnya. Motor BLDC mempunyai tanggapan lebih cepat, umur pakai lebih lama, lebih effisien dan ukurannya 40% lebih kecil dari pada motor DC. Sementara itu kinerja
(performance) dari sebuah sistem kendali sangat penting untuk diketahui, agar tujuan pengendalian
dapat dipenuhi. Tujuan pengendali seperti kecepatan respon terhadap gangguan, output sesuai dengan yang diinginan, kesanggupan sistem untuk mengikuti track yang diinginkan dan robustness. Penelitian ini merupakan perancangan sistem kendali kecepatan motor BLDC dengan pengendali memakai kendali logika fuzzy. Sebagai beban motor di kopel dengan generator dan dibebani dengan beban lampu yang divariasikan. Sebagai ukuran performance digunakan seberapa cepat respon waktu (delay time td, rise time tr, peak time tp dan peak overshoot Mp).Hasil penelitian kendali kecepatan motor BLDC dengan kendali logika fuzzy berdasarkan beban yang digunakan yaitu resistor 10 Ohm, 39 Ohm, dan 49 Ohm. Respon untuk resistor 10 Ohm didapatkan td 0,0125 detik, tr 0,031 detik, tp 0,03 detik, dan Mp 1,89%, untuk dengan resistor 39 Ohm didapatkan td 0,01 detik, tr 0,025 detik, tp 0,032 detik, dan Mp 2,34%, dan untuk resistor 49 Ohm didapatkan hasil td 0,012 detik, tr 0,024 detik, tp 0,032 detik, dan Mp 2,34%. Berdasarkan hasil tersebut disimpulkan bahwa permormance sistem kendali kecepatan motor BLDC ditentukan oleh besarnya gangguan yang diberikan pada sistem.
Kata kunci: motor BLDC, performance, respon, kendali logika fuzzy
1. PENDAHULUAN
Motor BLDC sudah banyak digunakan di industri seperti industri otomotif, konsumsi, kesehatan, otomasi industri dan instrumentasi. Mesin penggerak bertenaga elektrik yang populer adalah motor arus searah tanpa sikat (motor BLDC), karena memiliki kelebihan dibanding dengan jenis mesin penggerak bertenaga elektrik lainnya, seperti tanggapan lebih cepat, umur pakai lebih lama, dan mempunyai rentang kecepatan yang lebar dibandingkan dengan motor induksi [7]. Kelebihan lain motor BLDC adalah 13% lebih effisien dari motor induksi, ukurannya 40% lebih kecil dari pada motor DC konvensional, karena tidak memiliki sikat, maka kecil atau tidak ada perawatan, menghasilkan sedikit suara dan electrical noise dari pada motor DC konvensinal [2]. Pengendalian kecepatan motor BLDC perlu dilakukan agar respon kecepatan yang dihasilkan sesuai dengan yang diharapkan. Tanpa pengaturan kecepatan motor maka respon kecepatan yang didapatkan masih kurang baik. Ada beberapa metode yang dapat digunakan dalam pengendalian Motor BLDC, salah satunya yaitu dengan penggunaan kendali Proporsional-Integral-Derivatif (PID). Kendali PID merupakan kendali yang banyak digunakan dalam proses kontrol di industri. Hal ini dikarenakan kendali PID sangat efektif, implementasinya sederhana, dan luas penggunaanya. Akan tetapi, kendali PID memerlukan penalaan yang akurat untuk menentukan nilai konstanta yang digunakan.Keberhasilan pengendali PID tergantung ketepatan dalam menentukan konstanta PID [2]. Jika dalam menentukan konstanta PID kurang tepat, maka respon yang didapat akan kurang baik. Selain itu dalam kendali PID juga membutuhkan identifikasi plant sebelum dapat mengontrol sistem tersebut. Untuk suatu plant yang kompleks akan membutuhkan waktu lama untuk mendapatkan parameter plant yang akan dikendalikan. Maka pada penelitian ini dilakukan perancangan sistem kendali motor BLDC dengan menggunakan sistem logika fuzzy.
300 SENASPRO 2017 | Seminar Nasional dan Gelar Produk
Metode pengendalian dengan menerapkan prinsip logika fuzzy disebut FLC (fuzzy logic controller). Cara kerja pengendali ini mirip dengan seorang operator kendali, tidak memperhatikan struktur internal plant, hanya mengamati error sebagai selisih antara setpoint dengan keluaran sistem dan mengubah setting panel kendali untuk meminimalkan error tersebut. Sebuah FLC terdiri atas unit fuzzifikasi, basis pengetahuan fuzzy, mesin keputusan fuzzy, dan unit defuzzifikasi. Logika fuzzy telah terbukti berguna dalam perhitungan yang menyertakan persepsi dan pengetahuan yang tidak menentu, tidak tepat, samar-samar, sebagian benar, atau tanpa batas yang jelas.
Permasalahan dalam penelitian ini adalah bagaimana sistem kendali logika fuzzy dapat mengembalikan kecepatan motor BLDC sesuai dengan kecepatan setting dan karakteristik respon yang baik.
2. METODE
2.1. Rangkaian Penelitian
Motor BLDC type ZW60BL120-430 merupakan objek yang digunakan dalam penelitian ini. Bentuk fisik dari motor BLDC type ZW60BL120-430. Data teknis motor seperti padaTabel 1.
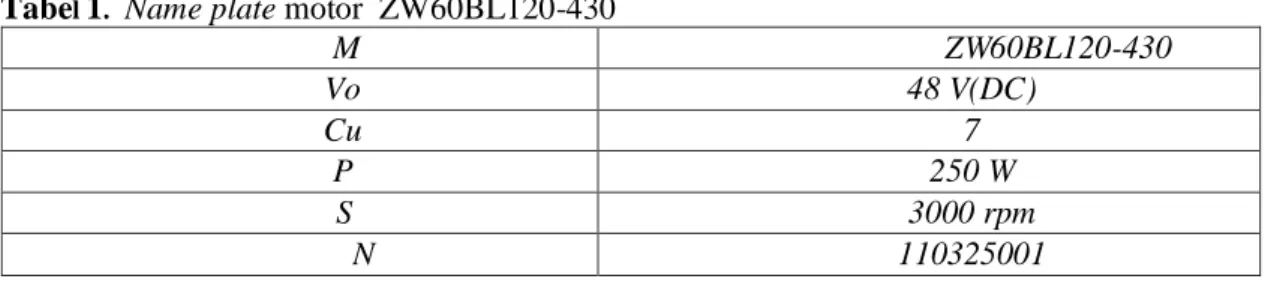
Tabel 1. Name plate motor ZW60BL120-430
M odel ZW60BL120-430 Vo ltage 48 V(DC) Cu rrent 7 A P ower 250 W S peed 3000 rpm N o. 110325001
Driver motor BLDC yang digunakan dalam penelitian ini adalah type10/50DPW15B,
data driver motor seperti pada Tabel 2.
Tabel 2. Data driver motor BLDC type 10/50DPW15B
Parameterter Nilai
Rated Voltage DC 24-48 V
Rated Power 400 Watt
Lower Voltage protection 18 ± 0,5 V
Lower Current protection 5 ± 0,5 A
Loss power 2 Watts max
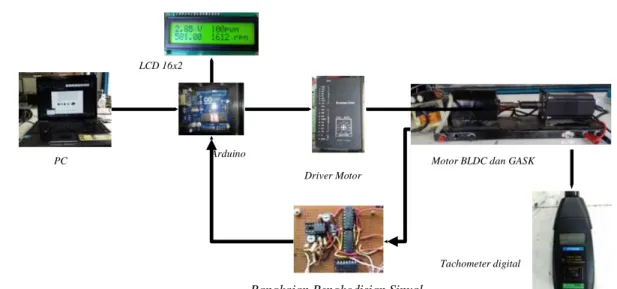
Sistem kendali kecepatan motor BLDC terdiri dari motor BLDC yang dikopel dengan Generator Arus Searah Konvensional (GASK), driver motor, Arduino, Personal Computer (PC), sesor kecepatan (tachometer) dan LDC. Rancangan penelitian seperti pada Gambar 1, berikut :
Seminar Nasional dan Gelar Produk | SENASPRO 2017 301
Gambar 1. Rangkaian Penelitian
Arduino Uno R3 menggunakan microcontroller Atmega328 yang memiliki 6 pin analog
input dan 14 pin I/O (6 pin sebagai output PWM). Data arduino Uno R3seperti pada Tebel 3.
Tabel 3. Data Arduino Uno R3
SRAM 2 kb (ATmega328)
EEPROM 1 kb (ATmega328)
Clock Speed 16 MHz
Sensor Hall effect berfungsi untuk mendapatkan posisi sudut rotor yang sudah tertanam
(embedded) pada motor BLDC. Output dari Hall effect berupa 3 buah sinyal square (disimbolkan
H1, H2, H3) yang masing-masing berbeda fase 120º. Ketiga sinyal square akan menjadi input pada gerbang ex-or untuk kemudian dijadikan satu, untuk menggabungkan ketiga sinyal tersebut digunakan 2 buah gerbang ex-or dimana gerbang pertama akan mengeksekusi sinyal H1 dan H2,
output dari gerbang ex-or yang pertama akan menjadi input untuk gerbang ex-or yang kedua, selain
itu yang akan menjadi input untuk gerbang ex-or yang kedua adalah sinyal H3, sinyal gabungan H1 dan H2 akan digabungkan dengan sinyal H3. Output akhir dari gerbang ex-or berupa sinyal gabungan sinyal H1, H2, dan H3 akan menjadi input untuk LM331 yang berfungsi sebagai f/v
converter. LM331 akan mengubah nilai besaran frekuensi dari sinyal gabungan H1, H2, dan H3
menjadi besaran tegangan DC yang akan menjadi input untuk pengendali.Rangkaianf/vconverter.
Tachometer digital type DT-2234Adigital digunakan untuk mengukur nilai besaran kecepatan berupa RPM (rotation per minutes). Tachometer digital type DT-2234A menggunakan infra merah untuk mendeteksi besaran kecepatan objek. Dalam pengukuran, posisi alat ukur ini harus dalam keadaan diam untuk mendapatkan hasil pengukuran yang akurat.
2.2. Rancangan Kendali Logika Fuzzy
Software yang digunakan dalam pembuatan rancangan kendali logika fuzzy adalah Arduino
IDE, dalam penulisan program diawali dengan pengenalan – pengenalan dengan inisialisasi terhadap apa saja yang akan diproses seperti variabel dan himpunan fuzzy. Setelah dikenalkan, pada
void setup() akan di instruksikan pin yang akan digunakan sebagai input dan output. Masuk ke void
loop(), disinilah semua proses akan ditulis dalam bahasa pemograman, mulai dari proses
fuzzification, fuzzy inference, serta defuzzification.
Fuzzification adalah suatu proses mengubah variabel numerik menjadi variabel linguistik (variabel fuzzy). Yang dimaksud variabel numerik adalah nilai dari variabel input sistem kendali. Variabel fuzzy mempunyai nilai mulai dari 0 sampai dengan 1.
PC
LCD 16x2
Arduino
Driver Motor
Rangkaian Pengkodisian Sinyal
Motor BLDC dan GASK
302 SENASPRO 2017 | Seminar Nasional dan Gelar Produk
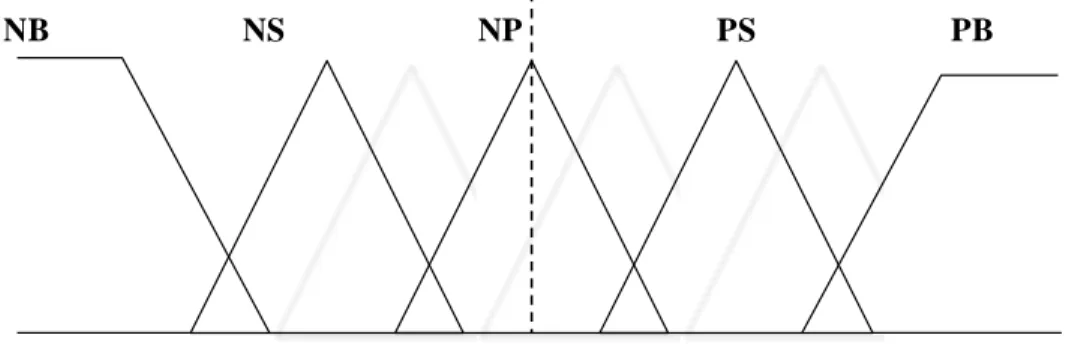
Input dari kendali logika fuzzy ada 2, yaitu : error dan derror. Masing-masing variabel input terdiri
dari 5 himpunan, yaitu : Negative Big (NB), Negative Small (NS), Zero Equals (ZE), Positive Small
(PS), dan Positive Big (PB). Himpunan variabel input error dan derror dapat dilihat pada Gambar
2 dan Gambar 3.
NB NS NP PS PB
Gambar 2. Input error
Anggota himpunan NB variabel input error mulai dari -1023 sampai -639.5 dan bernilai 1 apabila
error bernilai sama atau kecil dari -1023, untuk himpunan NS mulai dari -895 sampai -127.75,
himpunan NP dari -383.25 sampai 383.25, himpunan PS dari 127.75 sampai 895, dan himpunan PB dari 639.5 sampai 1023.
NB NS NP PS PB
Gambar 3. Input derror
Anggota himpunan NB variabel input derror mulai dari -1023 sampai -639.5 dan bernilai 1 apabila
derror bernilai sama atau kecil dari -1023, untuk himpunan NS mulai dari -895 sampai -127.75,
himpunan NP dari -383.25 sampai 383.25, himpunan PS dari 127.75 sampai 895, dan himpuna PB dari 639.5 sampai 1023.
Keputusan yang akan ditentukan oleh sistem kendali adalah output berupa lebar PWM dalam nilai linguistik yang akan diubah menjadi nilai numerik, selanjutnya untuk ditegaskan melalui proses
defuzzification. Dalam penelitian ini metode yang diterapkan adalah metode Mamdani. Hasil dari
defuzzification akan dijadikan input ke terminal SV pada driver motor BLDC. Untuk variabel output
terdiri dari 5 himpunan, yaitu : Negative Big (NB), Negative Small (NS), Zero Equals (ZE), Positive
Small (PS), dan Positive Big (PB).Gambar 4 adalah output PWM.
NB NS ZE PS PB
Seminar Nasional dan Gelar Produk | SENASPRO 2017 303 Untuk himpunan NB variabel output PWM mulai dari -255 sampai -75 dan bernilai1 apabila output
yang dihasilkan -255 sampai -150, anggota himpunan NS mulai dari -150 sampai 0, anggota himpunan ZE mulai dari -35 sampai 35, anggota himpunan PS mulai dari 0 sampai 150, sedangkan untuk anggota himpunan PB mulai dari 75 sampai 255 dan bernilai 1 apabila nilai keanggotaan 150 sampai 255.
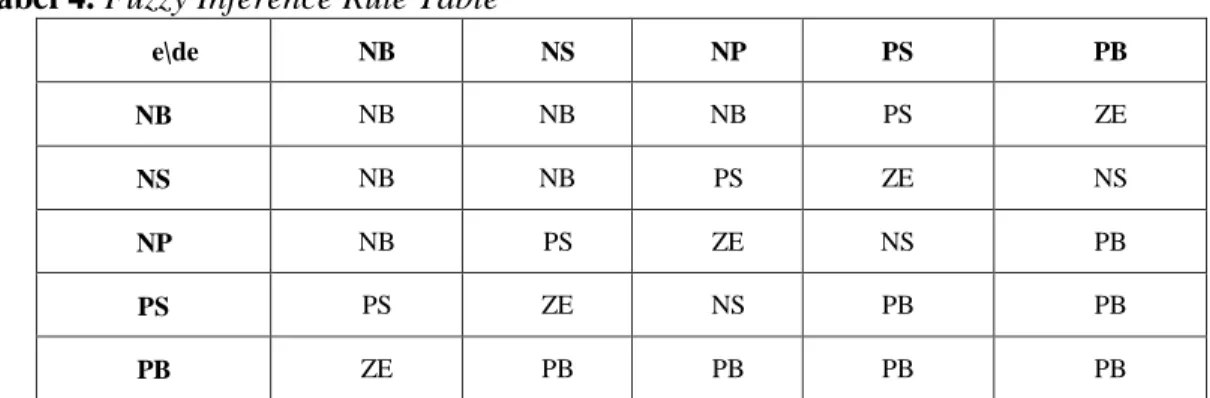
Fuzzy inference adalah suatu proses pengambilan keputusan oleh sistem kendali logika fuzzy dengan memperhatikan nilai linguistik yang diberikan oleh variabel input sistem. Sistem kendali menerapkan aturan-aturan (rule base) fuzzy dalam proses pengambilan keputusan yang akan diberikan terhadap plant yang dikendalikan.
Tabel 4.
Fuzzy Inference Rule Table
e\de NB NS NP PS PB NB NB NB NB PS ZE NS NB NB PS ZE NS NP NB PS ZE NS PB PS PS ZE NS PB PB PB ZE PB PB PB PB
Defuzzification adalah proses perubahan besaran fuzzy yang disajikan dalam bentuk himpunan – himpunan fuzzy keluaran dengan fungsi keanggotaannya untuk mendapatkan kembali bentuk tegasnya (crisp). Pada penelitian ini metode defuzzifikasi yang digunakan adalah metode Composite
Moment dimana solusi crisp diperoleh dengan cara mengambil titik pusat daerah fuzzy.
Data yang menjadi variabel input dalam alogaritma fuzzy kendali kecepatan motor BLDC adalah kecepatan (n) dan perubahan kecepatan (Δn). Dengan mengatur PWM motor, dimana ketika kecepatan (n) motor menurun sebesar (Δn), sistem kendali dapat mengembalikan kecepatan motor sesuai dengan kecepatan setting (nsetting). Analisa pada penelitian ini adalah respon dinamik yang dihasilkan sistem kendali dan perilaku dari motor BLDC. Dengan memperhatikan respon transien yang diberikan sistem, dapat dianalisa seberapa besar konstribusi logika fuzzy dalam kendali kecepatan. Sistem kendali yang baik akan memberikan respon transien dengan td, tr, tp dan ts dalam
t yang singkat, dan Mp yang kecil.
3. HASIL DAN PEMBAHASAN 3.1. Pengujian open loop beban berubah
Pengujian open loop beban berubah, bertujuan untuk melihat perubahan kecepatan akibat pembebanan kepada generator arus searah konvensional. Generator arus searah dikopel dengan motor BLDC sehingga ketika generator diberi beban, maka akan terjadi perubahan kecepatan akibat pembebanan. Jika kecepatan putaran generator berubah, maka kecepatan motor BLDC juga akan berubah. Untuk pengujian beban berubah, nilai resistor yang digunakan adalah 10 ohm, 39 Ohm, dan 49 Ohm.
3.1.1. Pengujian open loop dengan beban resistor 10 Ohm
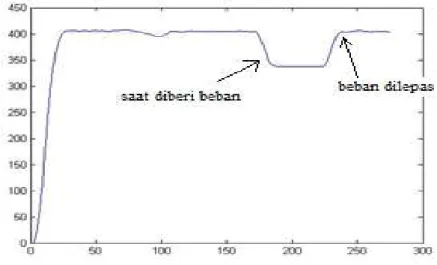
Langkah pengujian diawali dengan mengoperasikan motor BLDC untuk kemudian diberi beban. Arduino uno akan mebaca besaran kecepatan dengan menampilkan hasil konversi nilai kecepatan ke tegangan yang menjadi input pada pin A0. Hasil pembacaan kecepatan seperti grafik perubahan kecepatan akibat pembebanan resistor 10 Ohm, seperti pada Gambar 5.
304 SENASPRO 2017 | Seminar Nasional dan Gelar Produk
Gambar 5. Perubahan kecepatan akibat pembebanan resistor 10Ω
3.1.2. Pengujian open loop dengan beban resistor 39 Ohm
Untuk beban 39 ohm didapatkan grafik kecepatan terhadap waktu seperti pada Gambar 6
berikut :
Gambar 6. Perubahan kecepatan akibat pembebanan resistor 39Ω
3.1.3. Pengujian open loop dengan beban resistor 49 Ohm
Grafik perubahan kecepatan akibat pembebanan resistor 49 Ohm hasil pengujian dapat dilihat pada Gambar 7.
Seminar Nasional dan Gelar Produk | SENASPRO 2017 305
Gambar 7. Perubahan kecepatan akibat pembebanan resistor 49Ω
3.2. Kendali motor BLDC menggunakan logika fuzzy
Setelah melakukan pengujian open loop, pada tahap selanjutnya akan dilakukan pengujian kendali logika fuzzy atau bisa disebut pengujian close loop. Pengujian close loop akan dilakukan dengan memberikan beban resistor yang berbeda seperti pada pengujian open loop, bedanya nilai
error kecepatan diumpanbalikan ke arduino untuk medilakukan kereksi terhadap nilai setpoint. Nilai
besaran resistor yang akan digunakan adalah 10 Ohm, 39 Ohm, dan 49 Ohm. Hasil yang diperoleh akan dibandingkan dengan hasil pengujian open loop pengujian perubahan kecepatan akibat pembebanan. Langkah-langkah pengujian diawali dengan mengoperasikan motor BLDC untuk kemudian diberi beban yang berbeda-beda. Setelah diberi beban, diamati respon sistem dan dibandingkan dengan pengujian open loop dengan variabel beban yang sama.
3.2.1. Pengujian close loop dengan beban resistor 10 Ohm
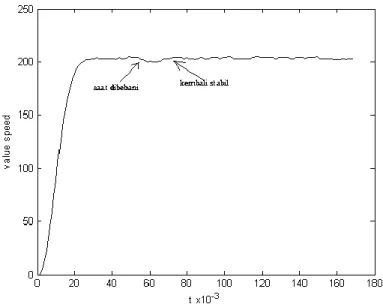
Langkah-langkah pengujian close loop dengan beban resistor 10 Ohm sama seperti yang sudah dijelaskan sebelumnya. Motor BLDC dioperasikan kemudian diberikan beban. Melihat respon kendali, dengan mengamati pembacaan nilai besaran kecepatan pada tampilan serial monitor Arduino yang ditampilkan pada monitor PC, kemudian data hasil pembacaan kecepatan dikopi ke software Matlab, agar didapatkan grafik respon kendali kecepatan motor BLDC berbasis logika fuzzy dengan beban resistor 10 Ohm. Hasil pengujian beban 10 Ohm untuk sistem yang close loop dapat dilihat pada Gambar 8.
306 SENASPRO 2017 | Seminar Nasional dan Gelar Produk
Gambar 8. Responkendali logika fuzzy resistor 10Ω
3.2.2. Pengujian close loop dengan beban resistor 39 Ohm
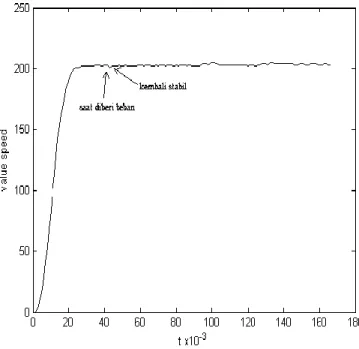
Dengan cara yang sama dilakukan pengujian untuk beban 39 ohm, h asil pengujian beban resistor 39 ohm untuk sistem kendali fuzzy seperti pada Gambar 9.
Gambar 9. Respon kendali logika fuzzy resistor 39Ω
3.2.3. Pengujian close loop dengan beban resistor 49 Ohm
Langkah-langkah pengujian close loop dengan beban resistor 49 Ohm sama seperti beban 10 ohm dan 39 ohm, hasil pengujian dapat dilihat pada Gambar 10.
Seminar Nasional dan Gelar Produk | SENASPRO 2017 307
Gambar 10. Respon kendali logika fuzzy resistor 49Ω
3.4. Pembahasan
Dari pengujian close loop dengan logika fuzzy didapatkan grafik respon kecepatanuntuk masing-masing beban yang diberikan akibat pembebanan terhadap motor BLDC. Grafik respon kecepatan akibat kendali logika fuzzy seperti pada Gambar 8, Gambar 9 dan Gambar 10 adalah tampilan pada software matlab R2013a untuk kemudian diperhatikan besar nilai td, tr, tp, dan mpyang diberikan oleh sistem kendali kecepatan berbasis logika fuzzy terhadap respon kecepatan. Hasil pengujian close loop dengan logika fuzzy berupa besar nilai td, tr, tp, dan mp dapat dilihat pada Tabel 5.
Tabel 5. Respon waktu close loop dengan logika fuzzy
Beban Resistor td tr tp Mp
10Ω 0.0125 detik 0.031 detik 0.03 detik 1.89% 39Ω 0.01 detik 0.025 detik 0.032 detik 2.34% 49Ω 0.012 detik 0.024 detik 0.032 detik 2.34%
Pada pengujian dengan resistor 10 Ohm, jika diamati respon tanpa pengendali dan dengan pengendali, didapat respon dengan pengendali lebih bagus dari pada respon tanpa pengendali. Pada respon dengan pengendali, sistem kendali dapat mengembalikan kecepatan putaran motor dalam waktu 18 x 10-3 detik. Pada pengujian dengan resistor 39 Ohm, jika diamati respon tanpa pengendali dan dengan pengendali, didapat respon dengan pengendali lebih bagus dari pada respon tanpa pengendali. Pada respon dengan pengendali, sistem kendali dapat mengembalikan kecepatan putaran motor dalam waktu 15 x 10-3 detik.
Pada pengujian dengan resistor 49 Ohm, jika diamati respon tanpa pengendali dan dengan pengendali, didapat respon dengan pengendali lebih bagus dari pada respon tanpa pengendali. Pada respon dengan pengendali, sistem kendali dapat mengembalikan kecepatan putaran motor dalam waktu 4 x 10-3 detik.
308 SENASPRO 2017 | Seminar Nasional dan Gelar Produk
4. KESIMPULAN
Perancangan sistem kendali kecepatan motor BLDC dengan menggunakan Kendali Logika Fuzzy telah berhasil memperbaiki respon sistem. Sistem dengan close loop telah mampu memperbaiki respon kecepatan dibandingkan dengan open loop. Penelitian selanjutnya menarik untuk dilakukan yaitu bagaiman perbandingan performance kendali kecepatan motor BLDC jika digunakan kendali PID dan Fuzzy Logic Control. Sistem juga dapat dikembangkan dengan beban yang dinamis.
DAFTAR PUSTAKA
[1] Gamazo, José Carlos-Real. dkk. 2010. Position and Speed Control of Brushless DC Motor
Using Sensorless Technique and Application Trends. Sensor. 10. 6901-6947
[2] Kristiyono, Roedy. dkk. 2015. “Sistem Kendali Kecepatan Motor BLDC Menggunakan
Alogaritma Hybrid PID-FUZZY”. etd. Repository. UGM
[3] Muslim, Muhammad Aziz. dkk, 2015. “Comparison Analysis Between Fuzzy and
Fuzzified-PID Methods on Gun-Barrel Motion Control”. Jurnal. Universitas Brawijaya
[4] Hidayat, 2014. Pengembangan Hybrid PID-ANFIS (Proporsional Integral Derivative- Adaptifve Neuro Fuzzy Inference System) Sebagai Pengendali Kecepatan Mesin Arus Searah
Tanpa Sikat (MASTS). Disertasi. UGM
[5] Landau, D.I, Zito, G. 2005. Digital Control System Design, Identification and Implementation. Springer-Verlag London Limied Edition. ISBN-10 : 1846280559
[6] Yongjian, LV, Hu Fa. 2009. Brushless DC Motor Speed Control System Based on Fuzzy Neural Network Control. Proceeding of the 2009 International Workshop on Information
Security and Aplication (IWISA 2009). Qindao. China. November 21-22
[7] Arulmozhiyal,R and Kandiban. 2012. An Intelligent Speed Controller for Brushless DC Motor. Industrial Electronics an Applications (ICIEA). 7th IEEE Converence. DOI:10.1109/ICIEA.2012.6360690.pp:16-21.
[8] Hidayat, Promono Hadi S, Sarjiya dan Suharyanto. 2011. Pemodelan dan Simulasi Adaptive Neuro Fuzzy Inference untuk Pengendalian Kecepatan Motor DC Brushless. Proceeding CITEE2011. 28 Juli 2011. Pp E-4-1