Bab IV
Analisis Dinamik
4.1Pemodelan Matematik Bus Tempel
Simple handling model merupakan gambar diagram benda bebas yang hanya menggambarkan gaya-gaya pada suatu bidang datar yang meliputi gaya lateral pada roda dan gaya traksi. Model matematik dirumuskan dengan menggunakan persamaan kesetimbangan ΣMcog = 0 dan ΣFy = 0.
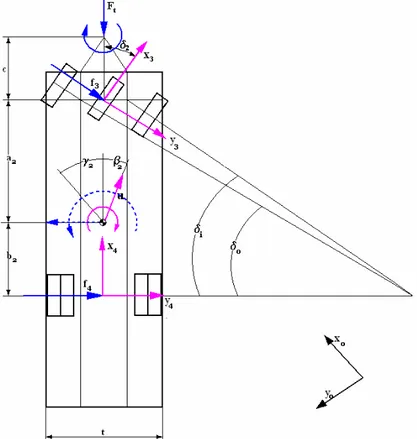
Gambar 4.1 Simple handling model unit depan (Header)
Gambar 4.1 menunjukkan simple handling model unit depan. Letak gandar dan dimensi unit depan (header) layout bus tempel empat gandar sama dengan layout bus tempel tiga gandar sehingga gambar 4.1 mewakili keduanya.
Persamaan kesetimbangan gaya dan momen pada unit depan bus tempel tipe pendorong ditunjukkan oleh persamaan 4.1 sampai dengan 4.6. Cara memperoleh nilai gaya f dapat dilihat pada persamaan B.26 sampai dengan B.36 pada lampiran. Nilai gaya Ft diperoleh dengan memperhitungkan beban drag dan rolling resistance pada kondisi tunak. Tanda negatif pada notasi β
dan α pada suku Ft mengikuti tanda β pada gandar belakang dan berlawanan
dengan tanda δ pada gandar depan.
Persamaan 4.1 dan 4.2 berikut adalah persamaan kesetimbangan gaya dan momen pada unit depan bus empat gandar tanpa peredam:
(
)
⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + + − − − ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − − = + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − − − ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − − = + ′ − − + ⋅ = + = ∑ a d c b u u F u b C u u u a C u u m u u F u b C u u u a C u u m F e T f f u u m F t t t T lateral 1 1 1 1 1 2 1 1 1 1 1 1 1 1 1 1 1 1 2 1 1 1 1 1 1 1 1 2 1 1 1 1 ) ( ) ( cos ) ( 0 δ β γ β δ γ β γ β α β γ β δ γ β γ β δ γ β & & & & & & & & & & ( ) ( ) ( ) ( ) 1 1 1 1 1 1 1 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 2 1 1 1 1 1 1 1 1 1 1 2 1 1 1 1 2 cos 0 b b a d c b u u F b u b C a u u u a C I b b u u F b u b C a u u u a C I b b F T b f a f mk M t t t T cog + ⋅ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛− − + + ⋅ + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − − ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − − = + ⋅ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − − ⋅ + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − − ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − − = + ⋅ ′ + − ⋅ − ⋅ ⋅ = = ∑ δ β γ β δ γ β γ α β γ β δ γ β γ δ γ & & && & & && &&Persamaan 4.3 dan 4.4 berikut adalah persamaan kesetimbangan gaya dan momen pada unit depan bus empat gandar dengan peredam:
(
)
(
)
(
)
⎟⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛− − + + − + − ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − − = + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − − − + − ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − − = + ′ − − + ⋅ = + = ∑ a d c b u u F u e C u b C u u u a C u u m u u F u e C u b C u u u a C u u m F e T f f u u m F t T t T t T lateral 1 1 1 1 1 1 1 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 2 1 1 1 1 1 1 1 1 2 1 1 1 1 .... ) ( .... ) ( cos ) ( 0 δ β γ β γ β δ γ β γ β α β γ β γ β δ γ β γ β δ γ β & & & & & & & & & & & & (4.1) (4.2) (4.3)(
)
(
)
(
)
(
)
(
1 1)
1 1(
) (
1)
1 1 1 1 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 2 1 1 1 1 1 1 1 1 1 1 2 1 1 1 1 1 1 2 1 1 1 1 2 .... .... cos 0 b b a d c b u u F u C b u b C a u u u a C I b b u u F u C b u b C a u u u a C I b b F C b f a f I b b F T b f a f mk M t T t T t T t T cog + ⋅ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + + − − ⋅ + + ⋅ − ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − − ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − − = + ⋅ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − − ⋅ + + ⋅ − ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − − ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − − = + ⋅ ′ + ⋅ − ⋅ − ⋅ = + ⋅ ′ + − ⋅ − ⋅ ⋅ = = ∑ δ β γ β γ β δ γ β γ α β γ β γ β δ γ β γ γ γ δ γ & & & && & & & && & && &&Nilai CT pada persamaan 4.3 dan 4.4 dipilih sembarang. Besar TT pada
persamaan 4.3 dan 4.4 bergantung pada besar CT dan besar kecepatan belok
dan kecepatan slip, sehingga tanda pada notasi β dan γ keduanya positif.
Persamaan 4.5 dan 4.6 berikut adalah persamaan kesetimbangan gaya dan momen pada unit depan bus tiga gandar dengan peredam:
(
)
(
)
⎟⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − − − + − ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − − = + a c b u u F u e C u b C u u u a C u u m t T 1 1 1 1 1 1 1 2 1 1 1 1 1 1 1 1 .... ) ( δ β γ β γ β δ γ β γ β & & & & &(
1 1)
1 1(
) ( )
1 1 1 1 1 2 1 1 1 1 1 1 1 1 .... b b a c b u u F u C b u b C a u u u a C I t T ⎟⎟⋅ + ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − − ⋅ + + ⋅ − ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − − ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − − = δ β γ β γ β δ γ β γ & & & &&Persamaan 4.3 mirip dengan persamaan 4.5 serta persamaan 4.4 mirip dengan persamaan 4.6. Hal ini karena perbedaan keduanya hanya pada korelasi metematik antara sudut belok α dengan sudut stir δ.
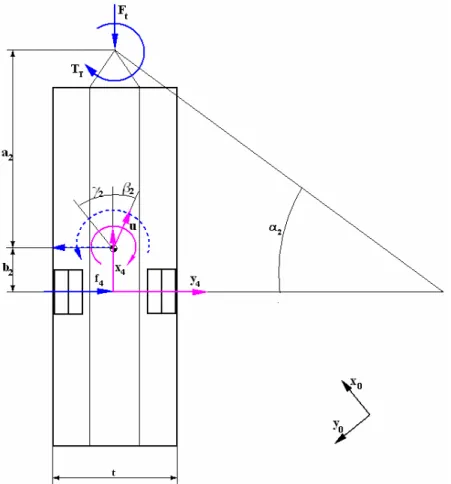
Gambar 4.2 menunjukkan simple handling model unit belakang bus empat gandar. Besar momen redaman pada unit belakang dimodelkan sebagai fungsi dari kecepatan belok unit depan. Oleh karena itu, pada proses pembuatan fungsi transfer unit belakang diperlukan substitusi dengan fungsi transfer unit
(4.4)
(4.5)
depan. Besar kecepatan slip diabaikan untuk mempermudah proses pembuatan fungsi transfer.
Gambar 4.2 Simple handling model unit belakang (Pusher) empat gandar
Persamaan 4.7 dan 4.8 berikut adalah persamaan kesetimbangan gaya dan momen pada unit belakang bus empat gandar gandar dengan peredam:
1 2 2 2 4 1 2 2 2 3 2 2 2 1 2 2 2 4 2 2 2 2 3 2 2 2 4 2 3 2 2 2 ) ( ) ( cos ) ( 0 γ γ β δ γ β γ β γ γ β δ γ β γ β δ γ β & & & & & & & & & & & & e C u b C a d u u u a C u u m e C u b C u u u a C u u m e T f f u u m F T T T lateral + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ⋅ + − − = + + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − − = + + + ⋅ = + = ∑ 2 2 2 2 4 1 2 1 2 2 2 3 2 2 2 2 2 2 4 1 2 2 2 2 2 3 2 2 2 4 2 2 3 2 2 2 cos 0 b u b C C a a d u u u a C I b u b C C a u u u a C I b f T a f k m M T T T cog ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − − + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛− − + ⋅ = ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − − + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − − = ⋅ − + ⋅ ⋅ = = ∑ γ β γ δ γ β γ γ β γ δ γ β γ δ γ & & & && & & & && && (4.7) (4.8)
Gambar 4.3 menunjukkan simple handling model unit belakang bus tiga gandar. Pada model matematik unit belakang bus tiga gandar tidak terdapat input gaya atau momen yang merupakan fungsi dari sudut stir δ. Oleh karena itu, model matematik ini tidak dapat diubah menjadi fungsi transfer kecepatan belok terhadap input step stir.
Gambar 4.3 Simple handling model unit belakang (Pusher) empat gandar
Persamaan 4.9 dan 4.10 berikut adalah persamaan kesetimbangan gaya dan momen pada unit belakang bus empat gandar gandar dengan peredam:
1 2 2 2 4 2 2 2 1 4 2 2 2 ) ( ) ( 0 γ γ β γ β γ γ β & & & & & & & e C u b C u u m e C f u u m F T T lateral + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − = + + = + = ∑ (4.9)
b u b C C I b f C I M T T cog ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − − = ⋅ − = = ∑ 2 2 2 4 1 2 2 2 4 1 2 2 0 γ β γ γ γ γ & & && & && (4.10)
4.2Perumusan Fungsi Transfer Bus Tipe Pendorong Tanpa Peredam
Berdasarkan persamaan 2.8 unit depan bus tempel tipe penarik akan tetap stabil meskipun tidak menggunakan peredam. Seluruh denumerator pada persamaan 2.8 senantiasa bertanda positif sehingga dapat disimpulkan bahwa seluruh poles terletak di sebelah kiri sumbu imajiner.
Persamaan 4.11 menunjukkan fungsi transfer unit depan bus tipe pendorong empat gandar tanpa peredam. Fungsi transfer ini dirumuskan dari model matematik 4.1 dan 4.2 yang penurunan lengkapnya dicantumkan pada persamaan A.1 sampai dengan A.11 pada lampiran. Variabel γ&
sama dengan variabel
ϖ .( )
( )
(
1(
1) (
1)
1 1)
1 1 1 1 2 1 1 E C D E C s s B C A sA s s + − + + + + + = Δ ΩNilai variabel-variabel pada persamaan 4.11:
( ) ( ) ( ) ( ) ( ) ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + = ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − − + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − − = − + = ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − − + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ⋅ ⋅ ⋅ + + ⋅ ⋅ − ⋅ ⋅ = ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ⋅ ⋅ ⋅ + ⋅ + + ⋅ ⋅ − = u b I C u a I C E I b b F I a C I b C u m u u m a C b C D u m F C C C I b b F I a C I b C a u u m d c b u F u u m u C B a u u m b b d c b u F u ua I C A t t t t t 2 1 1 2 2 1 1 1 1 1 1 1 1 1 1 2 1 2 1 1 1 1 2 1 2 1 1 1 1 1 1 1 1 2 1 1 1 1 1 1 1 1 1 ; 1 ; 1 1 ; 1
Poles pada persamaan 4.11 dapat berada di sebelah kanan sumbu imajiner apabila nilai C . Oleh karena itu, unit depan bus tipe pendorong tidak stabil bila input gaya traksi F
t F C (4.11) < + 2 1 t terlalu besar.
Persamaan 4.12 menunjukkan fungsi transfer unit belakang bus tipe pendorong empat gandar tanpa peredam. Fungsi transfer ini dirumuskan dari model matematik 4.7 dan 4.8 dengan menghilangkan notasi TT dan FT. Penurunan
lengkapnya dicantumkan pada persamaan A.12 sampai dengan A.22 pada lampiran. Variabel γ&
sama dengan variabel
ϖ .( )
( )
(
2(
2) (
2)
2 2)
2 2 2 2 2 2 2 E C D E C s s C B A sC s s + − + + + + + = Δ Ω (4.12)Nilai variabel-variabel pada persamaan 4.12: u I b C a C E u m u u m a C b C I a C b C D u m C C C u a m d u C I a C b C B u a I a d u C A ⋅ + = ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − − ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − = + = ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ⋅ ⋅ ⋅ ⋅ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − = ⋅ ⋅ ⋅ ⋅ ⋅ = 2 2 2 4 2 2 3 2 2 2 2 3 2 4 2 2 3 2 4 2 4 3 2 2 3 2 2 3 2 4 2 2 3 2 ; 2 2 ; 2 ; 2
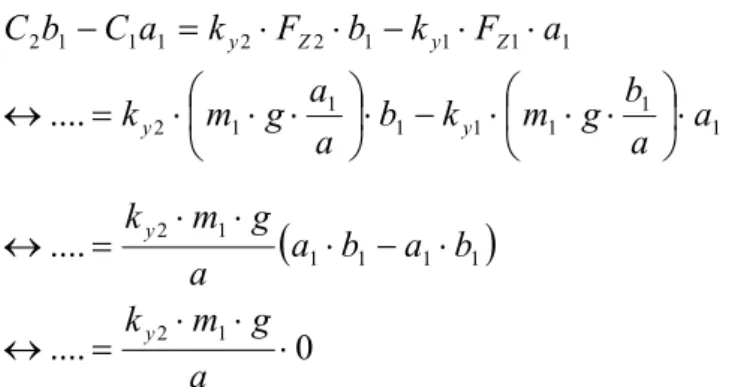
Variabel D2 bernilai nol apabila nilai ky1=ky2. Perumusannya adalah sebagai berikut: 1 1 1 1 1 1 1 2 1 1 1 1 2 2 1 1 1 2 .... a a b g m k b a a g m k a F k b F k a C b C y y Z y Z y ⋅ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ⋅ ⋅ ⋅ − ⋅ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ⋅ ⋅ ⋅ = ↔ ⋅ ⋅ − ⋅ ⋅ = −
(
)
0 .... .... 1 2 1 1 1 1 1 2 ⋅ ⋅ ⋅ = ↔ ⋅ − ⋅ ⋅ ⋅ = ↔ a g m k b a b a a g m k y yGambar 4.4 menunjukkan respon kecepatan belok unit depan bus tempel empat gandar tanpa damper kondisi kosong pada kecepatan 100 km/h
Gambar 4.4 Kurva respon kecepatan angular unit depan bus tempel empat gandar tanpa damper kondisi kosong terhadap input step stir pada kecepatan 100 km/h
4.3Perumusan Fungsi Transfer Bus Empat Gandar Dengan Peredam
Persamaan 4.13 menunjukkan fungsi transfer unit depan bus tipe pendorong empat gandar dengan peredam. Fungsi transfer ini dirumuskan dari model matematik 4.3 dan 4.4 yang penurunan lengkapnya dicantumkan pada persamaan A.23 sampai dengan A.33 pada lampiran.
( )
( )
(
1(
1) (
1)
1 1)
1 1 1 1 2 1 1 E C D E C s s B C A sA s s + − + + + + + = Δ ΩNilai variabel-variabel pada persamaan A.13:
( ) ( ) ( ) ( ) ( ) ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − + = ⋅ + − + = ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − − − ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − ⋅ − − = ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − − − ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ⋅ ⋅ ⋅ + + ⋅ ⋅ − ⋅ ⋅ = ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ⋅ ⋅ ⋅ + ⋅ + + ⋅ ⋅ − = 1 2 1 1 2 2 1 1 1 1 1 2 1 1 1 1 1 1 1 1 1 2 1 1 2 1 1 1 1 2 1 1 1 1 1 1 1 1 2 1 1 1 1 1 1 1 1 1 ; 1 1 1 1 I C u b I C u a I C E m e C u m F C C C I b b F I C u I a C I b C u m u u m e C u m a C b C D I b b F I C u I a C I b C a u u m d c b u F u u m u C B a u u m b b d c b u F u ua I C A T T t t T T t T t t
Variabel C1 mempengaruhi secara langsung kestabilan sistem. Apabila C1 bertanda negatif maka ada poles yang terletak di sebelah kanan sumbu imajiner. Variabel γ&
sama dengan variabel
ϖ . Tujuan mengganti notasi γ& dengan variabel ϖadalah untuk mempermudah penurunan persamaan fungsi transfer.
Persamaan 4.13 menunjukkan fungsi transfer unit belakang bus tipe pendorong empat gandar dengan peredam. Fungsi transfer ini dirumuskan dari model matematik 4.7 dan 4.8 dengan menghilangkan notasi TT dan FT. Penurunan
lengkapnya dicantumkan pada persamaan A.34 sampai dengan A.44 pada lampiran. ( ) ( ) ( ) ( ) ( ) ( ) ⎥⎦⎤ ⎢ ⎣ ⎡ + + − Ω ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ + + + ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ + + = Δ Ω 2 2 2 2 2 2 2 2 2 1 1 2 J H s I s s H s L K H s G F s s
Persamaan 4.15 diperoleh dengan mengsubstitusikan persamaan 4.13 ke dalam persamaan 4.14 sehingga variabel Ω1
( )
stereliminasi.
(4.13)
( )
( )
(
)
(
)
(
)
(
)
(
)
⎥⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + − − + + − + − + + + + + + − + + + + + ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + + + + + − + − + ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + + + + + + + + + − + + + + + + = Δ Ω 1 1 2 2 1 2 2 1 1 2 1 2 .... 1 1 2 1 2 1 1 2 1 2 .... 1 2 1 2 1 2 1 2 1 1 1 .... 2 2 1 1 1 2 2 1 1 1 2 2 1 1 2 2 .... 1 1 2 1 2 1 1 2 2 1 2 2 .... 2 ` 1 2 2 1 1 2 1 1 2 1 2 .... 1 2 1 2 2 1 2 2 1 1 2 1 2 .... 2 1 2 2 2 1 2 1 2 2 2 3 4 2 3 1 2 E C H J D H J E C I D I E C J D J E C H D H s E J C J E H C H E C D s J H E C s s B L L C A B H K C A H K E C G D G E C H F D H F L A H K A B K C A K E G C G E H F C H F E C F D F s K A G H F E F C F s F s s sNilai variabel A1, B1, C1, D1, dan E1 pada persamaan 4.15 sama seperti nilai variabel pada persamaan 4.13. Nilai variabel F2, G2, H2, I2, J2, K2, dan L2:
⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ⋅ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − = = + = ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ⋅ − − ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − = + = ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ⋅ ⋅ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − = ⋅ ⋅ ⋅ ⋅ = u m e C I a C I b C L I C K u I b C a C J u m u u m a C b C I a C b C I u m C C H a u m d u C I a C b C G a u I d a C F T T 2 2 2 3 2 2 4 2 2 2 2 4 2 2 3 2 2 2 2 3 2 4 2 2 3 2 4 2 4 3 2 2 3 2 2 3 2 4 2 2 3 2 ; 2 2 ; 2 2 ; 2 ; 2 (4.15)
4.4Perumusan Fungsi Transfer Bus Tiga Gandar Dengan Peredam
Persamaan 4.16 menunjukkan fungsi transfer unit depan bus tipe pendorong tiga gandar dengan peredam. Fungsi transfer ini dirumuskan dari model matematik 4.5 dan 4.6. Penurunan lengkapnya tidak dicantumkan pada lampiran karena analog dengan penurunan persamaan fungsi transfer unit depan bus tempel empat gandar dan hanya berbeda pada korelasi sudut belok α dan sudut stir δ.
( )
( )
(
1(
1) (
1)
1 1)
1 1 1 1 2 1 1 E C D E C s s B C A sA s s + − + + + + + = Δ ΩNilai variabel-variabel pada persamaan 4.16:
(
) (
)
⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − + = ⋅ + − + = ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ⋅ ⋅ ⋅ + ⋅ + ⋅ ⋅ − = 1 2 1 1 2 2 1 1 1 1 1 2 1 1 1 1 1 1 ; 1 ; 1 1 I C u b I C u a I C E m e C u m F C C C a u u m b b c b u F u ua I C A t t T T(
)
(
)
⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + − − − ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ⋅ ⋅ ⋅ + ⋅ ⋅ − ⋅ ⋅ = 1 1 1 1 1 1 1 1 2 1 1 1 1 I b b F I C u I a C I b C a u u m c b u F u u m u C B t T t (4.16)(
)
⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − − − ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − ⋅ − − = 1 1 1 1 1 1 1 1 2 1 1 2 1 1 1 1 2 1 I b b F I C u I a C I b C u m u u m e C u m a C b C D T T tFungsi transfer unit belakang tiga gandar dengan peredam maupun tanpa peredam belum dapat dibuat karena seluruh input gaya dan momen pada simple handling model unit belakang bus tempel tiga gandar bukan merupakan fungsi sudut stir δ. Hal ini terlihat jelas pada persamaan 4.9 dan 4.10 bahwa tidak satu pun suku pada persamaan tersebut merupakan fungsi dari sudut stir δ.
4.5Respon Dinamik Bus Tempel
Simulasi untuk menilai respon sistem dilakukan di program Matlab dengan input step. Simulasi ini bertujuan untuk membandingkan secara visual pengaruh kecepatan terhadap rise time, settling time, dan kecepatan putar tunak ωss. Gambar 4.5 sampai dengan 4.10 menunjukkan kurva kecepatan putar ω terhadap waktu t. Kecepatan putar ω memiliki pengertian yang sama dengan turunan pertama perubahan arah hadap bus yaitu γ&. Tabel 4.1 menunjukkan nilai parameter-parameter yang digunakan dalam simulasi.
Tabel 4.1 Nilai Parameter-parameter Bus Tempel Tipe Pendorong Bus 4 Gandar Bus 3 Gandar
Parameter
Kosong Penuh Kosong Penuh Keterangan
a (m) 5,90 5,90 wheelbase unit depan
b (m) 1,55 1,50 -
c (m) 1,35 4,50 -
d (m) 4,20 - wheelbase unit belakang
a1(m) 2,70 2,33 2,32 2,08
b1(m) 3,20 3,57 3,57 3,81
a2(m) 3,30 3,39 - -
b2(m) 0,89 0,80 0,19 0,01
jarak antara gandar dengan titik berat
Fz1 (N) 27837,78 47967,85 31471,17 51782,54
Fz2 (N) 23488,13 31306,75 20423,72 28237,62
Fz3 (N) 13292,75 16056,57 - -
Fz4 (N) 49226,37 67612,91 55774,46 79274,63
gaya vertikal pada roda
C1 (N) 174821,30 301238,14 197639,00 325194,37
C2 (N) 147505,47 196606,40 128260,97 177332,29
C3 (N) 83478,51 100835,28 - -
C4 (N) 309141,61 424609,11 350263,61 497844,68
gaya lateral pada roda (sebelum perkalian dengan sudut slip)
Tabel 4.1 (Lanjutan) Bus 4 Gandar Bus 3 Gandar Parameter
Kosong Penuh Kosong Penuh Keterangan
m1(kg) 5232,00 8081,00 5290,00 8157,00 massa unit depan
m2(kg) 6373,00 8529,00 5943,00 8099,00 massa unit belakang
k1(m) 2,93 2,88 2,88 2,81 radius girasi unit depan
k2(m) 1,71 1,65 0,91 0,21 radius girasi unit belakang
I1(kgm2) 45204,48 67218,56 43949,93 64840,61 inersia unit depan
I2(kgm2) 18820,43 23331,62 4989,00 363,64 inersia unit belakang
ky1,2 (-) 6,28 koefisien gaya lateral
e (m) 0,50 -
CT (Nm/rads-1) 10.000,00 -
Seluruh parameter yang terdapat pada tabel 4.1 kemudian dimasukkan ke dalam fungsi transfer. Tabel 4.2 menunjukkan fungsi transfer yang disimulasikan. Pada tabel ini juga ditampilkan letak poles, nilai frekuensi pribadi, dan nilai koefisien redaman.
Tabel 4.2 Fungsi Transfer, Frekuensi Pribadi, dan Koefisien Redaman
Gambar u (km/h) Fungsi Transfer r p ωn ζ 35 944 , 55 976 , 14 474 , 84 299 , 10 2+ + + s s s -5,205 15,504 -7,843 -7,133 7,133 7,843 1 60 170 , 24 693 , 9 162 , 57 285 , 10 2+ + + s s s -21,346-72,878i -21,346+72,878i -4,846+0,825i -4,846-0,825i 4,916 0,986 Gambar 4.5 (unit depan empat gandar penuh) 100 210+,6229,727 41+13,504,268 + s s s 5,115-2,539i 5,115+2,539i -3,364+1,398i -3,364-1,398i 3,643 0,923 35 281 , 64 239 , 16 977 , 95 257 , 10 2+ + + s s s 0,180 10,077 -9,402 -6,837 6,837 9,402 1 60 555 , 29 955 , 10 567 , 68 220 , 10 2+ + + s s s -4,293 14,513 -6,147 -4,808 4,808 6,147 1 Gambar 4.6 (unit depan empat gandar kosong) 100 210+,1257,984 52+17,713,391 + s s s 5,063-5,096i 5,063+5,096i -3,992+1,206i -3,992-1,206i 4,170 0,957 35 798 , 55 948 , 14 375 , 83 319 , 10 2+ + + s s s -7,325 17,645 -7,724 -7,224 7,224 1 60 210+,9306,665 56+24,361,127 + s s s 5,153-3,727i 5,153+3,727i -4,833+0,880i -4,833-0,880i 4,912 0,984 Gambar 4.7 (unit depan tiga gandar penuh) 100 303 , 13 699 , 6 657 , 40 257 , 10 2+ + + s s s 5,129-2,183i 5,129+2,183i -3,350+1,444i -3,350-1,444i 3,647 0,918
Tabel 4.2 (Lanjutan) Gambar u (km/h) Fungsi Transfer r p ωn ζ 35 050 , 64 197 , 16 647 , 94 284 , 10 2+ + + s s s 0,558 9,726 -9,338 -6,859 6,859 9,338 1 60 210+10,251,911 67+29,128,458 + s s s -5,027 15,278 -6,007 -4,904 4,904 6,007 1 Gambar 4.8 (unit depan tiga gandar kosong) 100 394 , 17 938 , 7 189 , 51 168 , 10 2+ + + s s s 5,084-4,228i 5,084+4,228i -3,969+1,281i -3,969-1,281i 4,171 0,952 Tabel 4.2 (Lanjutan)
Gambar (km/h) u Fungsi Transfer r p ωn ζ
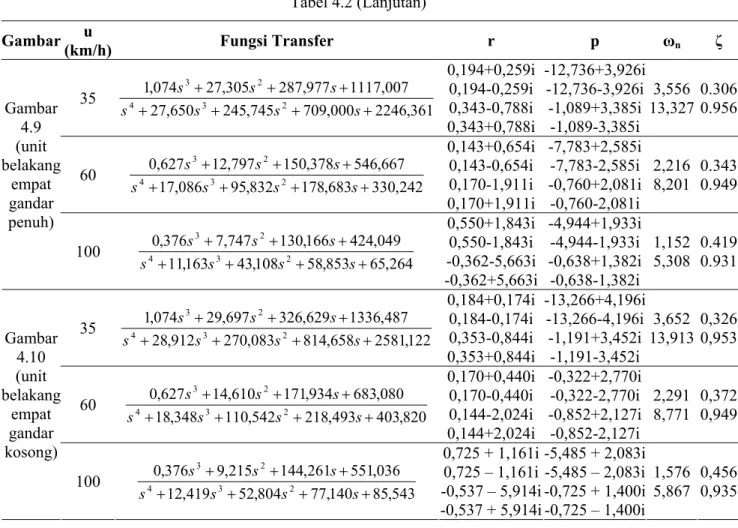
35 361 , 2246 000 , 709 745 , 245 650 , 27 007 , 1117 977 , 287 305 , 27 074 , 1 2 3 4 2 3 + + + + + + + s s s s s s s 0,194+0,259i 0,194-0,259i 0,343-0,788i 0,343+0,788i -12,736+3,926i -12,736-3,926i -1,089+3,385i -1,089-3,385i 3,556 13,327 0.306 0.956 60 242 , 330 683 , 178 832 , 95 086 , 17 667 , 546 378 , 150 797 , 12 627 , 0 2 3 4 2 3 + + + + + + + s s s s s s s 0,143+0,654i 0,143-0,654i 0,170-1,911i 0,170+1,911i -7,783+2,585i -7,783-2,585i -0,760+2,081i -0,760-2,081i 2,216 8,201 0.343 0.949 Gambar 4.9 (unit belakang empat gandar penuh) 100 264 , 65 853 , 58 108 , 43 163 , 11 049 , 424 166 , 130 747 , 7 376 , 0 2 3 4 2 3 + + + + + + + s s s s s s s 0,550+1,843i 0,550-1,843i -0,362-5,663i -0,362+5,663i -4,944+1,933i -4,944-1,933i -0,638+1,382i -0,638-1,382i 1,152 5,308 0.419 0.931 35 122 , 2581 658 , 814 083 , 270 912 , 28 487 , 1336 629 , 326 697 , 29 074 , 1 2 3 4 2 3 + + + + + + + s s s s s s s 0,184+0,174i 0,184-0,174i 0,353-0,844i 0,353+0,844i -13,266+4,196i -13,266-4,196i -1,191+3,452i -1,191-3,452i 3,652 13,913 0,326 0,953 60 820 , 403 493 , 218 542 , 110 348 , 18 080 , 683 934 , 171 610 , 14 627 , 0 2 3 4 2 3 + + + + + + + s s s s s s s 0,170+0,440i 0,170-0,440i 0,144-2,024i 0,144+2,024i -0,322+2,770i -0,322-2,770i -0,852+2,127i -0,852-2,127i 2,291 8,771 0,372 0,949 Gambar 4.10 (unit belakang empat gandar kosong) 100 543 , 85 140 , 77 804 , 52 419 , 12 036 , 551 261 , 144 215 , 9 376 , 0 2 3 4 2 3 + + + + + + + s s s s s s s 0,725 + 1,161i 0,725 – 1,161i -0,537 – 5,914i -0,537 + 5,914i -5,485 + 2,083i -5,485 – 2,083i -0,725 + 1,400i -0,725 – 1,400i 1,576 5,867 0,456 0,935
Unit belakang bus tempel tiga gandar tidak dapat disimulasikan karena fungsi tansfernya tidak dapat dirumuskan. Hal ini disebabkan oleh tidak adanya gaya atau momen pada simple handling model unit belakang bus tempel tiga gandar yang merupakan fungsi dari sudut stir. Gambar 4.5 sampai dengan 4.10 menunjukkan simulasi dari fungsi transfer pada tabel 4.2.
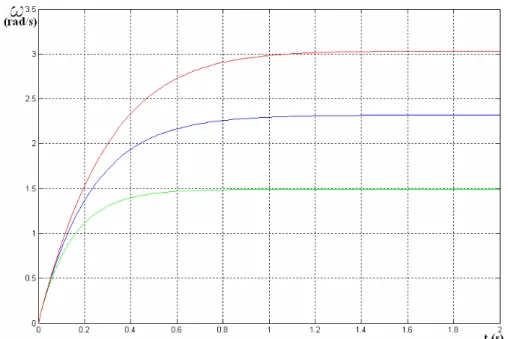
Gambar 4.5 Kurva respon kecepatan angular unit depan bus tempel empat gandar kondisi penuh terhadap input step stir pada kecepatan 35 km/h (hijau), 60 km/h
(biru), dan 100 km/h (merah)
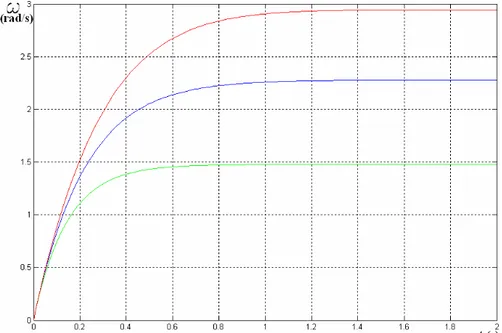
Gambar 4.6 Kurva respon kecepatan angular unit depan bus tempel empat gandar kondisi kosong terhadap input step stir pada kecepatan 35 km/h (hijau), 60 km/h
Gambar 4.7 Kurva respon kecepatan angular unit depan bus tempel tiga gandar kondisi penuh terhadap input step stir pada kecepatan 35 km/h (hijau), 60 km/h
(biru), dan 100 km/h (merah)
Gambar 4.8 Kurva respon kecepatan angular unit depan bus tempel tiga gandar kondisi kosong terhadap input step stir pada kecepatan 35 km/h (hijau), 60 km/h
Gambar 4.9 Kurva respon kecepatan angular unit belakang bus tempel empat gandar kondisi penuh terhadap input step stir pada kecepatan 35 km/h (hijau), 60 km/h
(biru), dan 100 km/h (merah)
Gambar 4.10 Kurva respon kecepatan angular unit belakang bus tempel empat gandar kondisi kosong terhadap input step stir pada kecepatan 35 km/h (hijau), 60 km/h
4.6Waktu Respon Bus Tempel
Tabel 4.3 menunjukkan waktu respon berdasarkan gambar 4.5 sampai dengan 4.8. Rise time adalah waktu yang diperlukan untuk mencapai 10% sampai dengan 90% nilai steady kurva. Settling time adalah waktu sampai dengan kurva stabil antara 95% sampai dengan 105% nilai steady kurva. Rise time bus tempel tiga gandar pada kecepatan 100 km/h adalah 0,55 s. Hasil analisis P.S. Fancher menunjukkan nilai rise time 0,87 s. Kedua nilai ini hanya berselisih 0,32 s.
Tabel 4.3 Waktu Respon Kecepatan Angular Unit Depan Kondisi Bus Kosong Penuh Jumlah Gandar Kecepatan Bus (km/h) tr (s) ts (s) tr (s) ts (s) 35 0,32 0,45 0,31 0,49 60 0,51 0,66 0,49 0,66 4 100 0,57 0,80 0,54 0,73 35 0,32 0,45 0,33 0,40 60 0,48 0,66 0,49 0,64 3 100 0,55 0,73 0,56 0,73
Apabila dibandingkan, rise time dan settling time depan bus tiga gandar pada kecepatan 100 km/h lebih cepat daripada bus empat gandar. Akan tetapi pada kecepatan rendah keduanya menunjukkan respon yang sama.
Tabel 4.4 menunjukkan waktu respon berdasarkan gambar 4.9 dan 4.10. Rise time dan settling time unit belakang bus tempel empat gandar lebih lambat daripada unit depannya. Hal ini disebabkan karena unit belakang mengalami osilasi. Osilasi terjadi karena penambahan peredam. Rise time unit belakang bus tempel empat gandar pada kecepatan 100 km/h adalah 1,09 s dan overshoot kecepatan angular sebesar 20%. Hasil analisis pada unit belakang bus tempel tiga gandar pada kecepatan 100 km/h oleh P.S. Fancher menunjukkan nilai rise time
1,10 s dan nilai overshoot kecepatan angular sebesar 27%. Kedua nilai ini hanya berselisih 0,01 s dan 7%.
Tabel 4.4 Waktu Respon Kecepatan Angular Unit Belakang Kondisi Kosong Kondisi Penuh Jumlah Gandar Kecepatan Bus (km/h) tr (s) ts (s) Overshoot kecepatan angular (%) tr (s) ts (s) Overshoot kecepatan angular (%) 35 0,42 1,93 32 0,32 2,00 36 60 0,61 3,29 27 0,61 3,54 21 4 100 1,09 3,32 20 1,00 4,79 24
4.7Analisis Parameter Fungsi Transfer 4.7.1Poles Fungsi Transfer Unit Depan
Pada bus tempel empat gandar, persamaan 4.13
( )
( )
(
1(
1) (
1)
1 1)
1 1 1 1 2 1 1 E C D E C s s B C A sA s s + − + + + + + = Δ ΩLetak akar denumerator:
(
( 1 1) ( 1 1) 4( 1 1 1))
2 1 2 2 , 1 C E C E D C E s = − + ± + − − +Sistem akan stabil apabila akar-akar (S1,2) denumerator berada di sebelah kiri sumbu imajiner yaitu:
0 ) 1 1 (C +E >
dan
(
1 1 1)
0(
1 1 1)
4 ) 1 1 ( ) 1 1 (C +E > C +E 2 − −D +C E → < −D +C E(
)
(
)
u e I m e I F u e m C u I C b m I e C a m I e C u e I m e I F u e m C u I C b e m C a e m C e I C e I C I C u b I C u a I C m e C u m F C C E C t T T t T T T T t ⋅ ⋅ ⋅ − − + + + + = ⋅ ⋅ ⋅ − − + ⋅ + ⋅ + + = ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − + + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ⋅ + − + = + 1 1 1 1 1 2 1 1 1 2 2 1 1 1 1 1 1 1 1 1 2 1 1 2 2 1 1 1 1 2 1 1 1 2 1 1 2 2 1 1 1 1 1 2 1 .... .... 1 1Nilai C1+E1>0 apabila
(
I ma)
C e(
I mb)
C I u C meu FI ee
( ) ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ⋅ + − + + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + − − − ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − ⋅ − − − = + − 1 2 1 1 2 2 1 1 1 1 1 2 1 1 1 1 1 1 1 1 1 2 1 1 2 1 1 1 1 2 ... ... ... 1 1 1 I C u b I C u a I C m e C u m F C C I b b F I C u I a C I b C u m u u m e C u m a C b C E C D T T t t T T
Berdasarkan perhitungan di excel diperoleh nilai D1 selalu nol karena C2b1-C1a1=0. Penjelasannya sebagai berikut:
1 1 1 1 1 1 1 2 1 1 1 1 2 2 1 1 1 2 .... a a b g m k b a a g m k a F k b F k a C b C y y Z y Z y ⋅ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ⋅ ⋅ ⋅ − ⋅ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ⋅ ⋅ ⋅ = ↔ ⋅ ⋅ − ⋅ ⋅ = −
Sesuai dengan asumsi bahwa ky1=ky2
(
)
0 .... .... 1 2 1 1 1 1 1 2 ⋅ ⋅ ⋅ = ↔ ⋅ − ⋅ ⋅ ⋅ = ↔ a g m k b a b a a g m k y ySistem menjadi tidak stabil apabila C1 bertanda negatif atau E1 bertanda negatif. t T T t T t F C C C e u m C F C C m e C u m F C C < + + ↔ < ⋅ + − + ↔ < ⋅ + − + 2 1 1 2 1 1 1 2 1 0 0 u C b C a C u I u C b C a C I C u b I C u a I C T T T < + ↔ < − + ↔ < − + 2 1 2 2 1 1 1 2 1 2 2 1 1 1 2 1 1 2 2 1 1 1 0 0
Denumerator fungsi transfer unit depan bus tempel empat gandar sama dengan denumerator unit depan bus tempel tiga gandar sehingga keduanya sama memiliki respon yang konvergen.
(4.18)
(4.19)
4.7.2Numerator Fungsi Transfer Unit Depan Pada bus tempel empat gandar, persamaan 4.13
( )
( )
(
1(
1) (
1)
1 1)
1 1 1 1 2 1 1 E C D E C s s B C A sA s s + − + + + + + = Δ ΩNilai tunak kurva dapat diperkirakan dengan final value theorem. Misalkan:
( )
( )
s H(s) A(s) B(s) H(s) B s A ⋅ = → =Dengan input step stir: s
s B( )=1
Maka nilai tunak kurva:
(
)
(
) (
)
(
)
(
1 1 1)
1 1 1 .... 1 1 1 1 1 1 1 1 1 1 lim .... ) ( lim ) ( lim 2 0 0 E C D B C A E C D E C s s B C A sA s s s sA t a s s t + − + = ↔ + − + + + + + ⋅ / ⋅ / = ↔ = → → ∞ →Parameter a, b, c, dan d merupakan konstanta yang nilainya bergantung pada dimensi bus. Parameter a1, b1, C1 dan C2 merupakan konstanta yang nilainya dipengaruhi oleh koefisien gaya lateral pada roda, berat bus dan titik berat bus. Parameter u dan Ft merupakan variabel yang nilainya dipengaruhi oleh daya keluaran mesin. Oleh karena itu, nilai tunak kecepatan belok terutama dipengaruhi oleh kecepatan kendaraan dan daya keluaran mesin. Pada bus tempel tiga gandar berlaku hal serupa:
(4.21)
4.7.3Poles Fungsi Transfer Unit Belakang
Pada bus tempel empat gandar, persamaan 4.14 denumerator fungsi transfer bernilai:
[
s2 +s(
H2+J2) (
+ −I2+J2H2)
]
[
s2+s(
C1+E1) (
+ −D1+C1E1)
]
)
Agar fungsi transfer stabil maka letak poles harus di sebelah kiri sumbu imajiner. Agar seluruh variabel pada denumerator bertanda positif maka
dan
(
2 2) (
2 2 22 s H J I J H
bertanda positif. Pembahasan tentang s2+s
(
C1+E1) (
+ −D1+C1E1)
pada sub bab 4.7.1.Pada sub bab ini akan dibahas tentang s2+s
(
H2+J2) (
+ −I2+J2H2)
Sistem akan stabil apabila akar-akar (S1,2) denumerator berada di sebelah kiri sumbu imajiner yaitu:0 ) 2 2 (H +J >
dan
(
2 2 2)
0(
2 2 2)
4 ) 2 2 ( ) 2 2 (H +J > H +J 2 − −I +J H → < −I +J H ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + = + u I b C a C u m C C J H 2 2 2 4 2 2 3 2 4 3 2 2Nilai H2+J2 akan selalu positif karena semua tanda pada persamaan 4.22 bertanda positif. ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + + + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ⋅ − − ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − − = + − u m C C u I b C a C u m u u m a C b C I a C b C H J I 2 4 3 2 2 2 4 2 2 3 2 2 2 2 3 2 4 2 2 3 2 4 2 2 2
Berdasarkan perhitungan di excel diperoleh nilai I2 selalu nol karena C2b1-C1a1=0. Oleh karena itu, nilai -I2+J2H2 selalu positif
(4.22)