1
Research Associate, Lab. Getaran dan Kendali, Dep. Teknik Penerbangan, Institut Teknologi Bandung 2
Lecturer, Dep. Teknik Penerbangan, Institut Teknologi Bandung
3
Graduate Research Assistance, Dep. Teknik Penerbangan, Institut Teknologi Bandung 4
Corresponding Author
KENDALI TRACKING-OPTIMAL LQG UNTUK
MODEL HELIKOPTER
H.Y Sutarto1 ,A.Budiyono 2,4, dan Singgih.S.Wibowo3
Abstrak
Sejumlah persoalan sistem kendali yang mempertimbangkan hal-hal praktis melibatkan kemampuan perancangan sistem kendali yang mampu menstabilkan sistem kendalian namun juga serentak mampu meminimisasi respon worst-case terhadap gangguan yang bersifat exogenous. Sistem kendali ini biasanya dalam sistematika perancangannya melibatkan formulasi matematika dengan norm tertentu agar mampu digunakan untuk pengkajian kinerja. Hal ini berkaitan dengan persoalan disturbance rejection , tracking dan kekokohan terhadap ketidakpastian (uncertainty) model, yang dalam makalah ini diformulasikan dalam
kerangka norm H2 atau yang popular dikenal sebagai LQG. Sifat dan kinerja sistem kendali ini diuji dan
simulasikan untuk persoalan tracking pada modus gerak cruise dengan berbagai trayektori pada sistem MIMO (Multi-Input Multi-Output) model helicopter Yamaha R-50.
Abstract
A large number of control problems of practical importance involve designing a controller capable of stabilizing a given plant while minimizing the worst-case response to some exogenous disturbances. The control algorithm in the control design process involves mathematical formulation by certain norm used for performance assessment. In this paper, the proposed technique address problems such as disturbance
rejection, tracking and model uncertainty formulated in the H2 framework or LQG in the popular
terminology. The properties and performance of the control system are tested and simulated for tracking problem of MIMO system corresponding to the Yamaha R-50 Helicopter model at cruise mode following some trajectories.
Keywords: estimator, LQG, tracking control, MIMO aerospace system, helicopter control
1. PENDAHULUAN
Perancangan sistem kendali pada model helikopter merupakan tantangan bagi para perancang sistem kendali. Hal ini mengingat bahwa sistem helicopter mempunyai perilaku yang kompleks seperti sifat non-linieritas yang tinggi, MIMO dengan kopling tinggi dan non-minimum
phase. Selain itu berbeda dengan sistem helicopter
skala-penuh, model helikopter mempunyai tingkat dinamika yang lebih cepat dan responsif [metler]. Hal ini mengakibatkan model helikopter lebih sulit untuk dikendalikan dari pada helikopter skala penuh. Oleh karena itu biasanya didalam model helikopter ditambahkan suatu system Bell-Hiller stabilizer bar yang berfungsi sebagai a lagged attitude rate
feedback, menurunkan laju sensitifitas dan
menstabilkan gerak phugoid.
Sistem kendali klasik yang menggunakan pendekatan trial-error seperti pada PID menjadi berkurang nilai praktisnya terutama untuk analisis dan sintesis sistem MIMO, namun demikian, untuk aplikasi MIMO dengan berbagai asumsi penyederhanaan bisa ‘didekati’ menjadi sistem SISO, kendali PID masih tetap menjadi sebuah pilihan yang menarik untuk dikaji. [4]. Pada perkembangan selanjutnya ,sistem kendali yang mempunyai kemampuan untuk mengatasi sistem MIMO didalam algortma perancangannya mulai banyak dikembangkan dan diaplikasikan. Salah satu teknik kendali tersebut adalah sistem kendali optimal. Pertama-tama sistem kendali optimal yang dikembangkan adalah sistem kendali dengan
umpan-balik full-state atau yang biasa dikenal debagai LQR. Sistem kendali ini mempunyai sifat kestabilan dan kekokohan (robustness) yang baik.Tujuan dalam perancangan system kendali LQR adalah untuk meminimisasi fungsi kuadratik terbobot terhadap input maupun state. Matrik bobot input dan state ini merupakan parameter disain yang utama dan juga merupakan parameter ‘tuning’ yang menentukan kualitas pengendalian. Namun sayangnya, dalam kendali optimal tidak terdapat pemilihan bobot input dan state ini secara eksak, meskipun ada beberapa metoda untuk pemilihan matrik bobot tsb. Sistem kendali LQR ini mengasumsikan ketersediaan
informasi semua state untuk diumpan-balikkan.
Asumsi ini dari perspektif implementasi menjadi tidak praktis dan berbiaya tinggi. Hal inilah yang melandasi untuk mengembangkan sistem kendali optimal berbasis umpanbalik output yang kemudian dikenal sebagai LQG. Sistem kerja LQG ini pada dasarnya adalah merancang sebuah estimator yang berfungsi untuik mengestimasi seluruh state berdasarkan informasi output feedback yang terkontaminasi noise.Selain itu juga estimator ini mempunyai kemampuan untuk mensupresi noise dengan memanfaatkan sifat-sifat statistik sistem dinamiknya.Dengan demikian sistem kendali LQG ini mampu memberi kepraktisan dan relatif lebih ekonomis dibanding LQR, meskipun demikian keunggulan LQG ini mengakibatkan sifat kestabilan dan kekokohan sistem lup tertutupnya menurun.Hal ini pertama kali ditunjukkan oleh Doyle [5] dan pembaca yang tertarik dapat melihatnya secara ditail dan gamblang di berbagai buku text book [2,6,8].
Makalah ini mempelajari aplikasi sistem kendali
tracking LQG pada model helicopter Yamaha R-50.
Aplikasi ini diuji dengan berbagai trayektori navigasi beserta dengan sifat kestabilan dan kekokohannya dibandingkan dengan kendali LQR. Studi sifat kestabilan dan kekokohan ini dilakukan dengan menggunakan konsep Small-Gain Theorem seperti yang banyak dilakukan untuk analisis pada sistem kendali kokoh. Hal ini dilakukan karena sistem helikopter yang diteliti ternyata mempunyai sifat non-minimum phase dimana sistem dinamik dari helikopter ini mempunyai zero yang terletak disebelah kanan sumbu imajiner. Oleh karena itu analisisnya tidak menggunakan pendekatan ‘klasik’ seperti gain dan phase margin karena akan rumit untuk dilakukan.Selain karena alasan kerumitan, hal ini juga menyangkut bahwa perubahan gain dan
phase pada pendekatan klasik mengasumsikan bahwa kedua perubahan tidak terjadi secara serentak di kedua-duanya. Perubahan hanya terjadi di salah satu.Pada kenyataannya, perubahan sering terjadi di kedua-duanya, oleh karena itu dalam makalah ini analisis dilakukan dengan menggunakan pendekatan
Small-Gain Theorem.
2. Kendali Optimal LQG
Suatu sistem dinamik linier yang melibatkan
white Gaussian pada proses dan pengukurannya
serta pada pengukurannya terkontaminasi noise
dapat dinyatakan sebagai berikut:
ν
ϖ
+
=
Γ
+
+
=
•x
C
y
u
B
x
A
x
Dengan cost-function/indeks performansinya
adalah:
(
)
⎭
⎬
⎫
⎩
⎨
⎧
+
=
∫
− ∞ → T T T T Tdt
u
R
u
x
Q
x
E
T
J
2
1
lim
Persoalannya adalah untuk mendapat kendali optimal yang meminimisasi the average cost. Perhatikan bahwa, oleh karena state dan kendali adalah acak (random), maka cost function juga acak. Oleh karena itu kita meminimasi secara
average/rata-rata. Dengan menggunakan prinsip
minimum (secara rinci dapat dilihat buku-buku text kendali optimal [2,6,8] maka didapat penyelesaian sbb:
0
0
)
(
0 1 0 1 1 1=
Γ
Γ
+
∑
∑
−
∑
+
∑
∑
=
⎟
⎠
⎞
⎜
⎝
⎛ −
+
+
=
=
+
−
+
=
−
=
− − ∧ ∧ ∧ − − ∧ • T T T T T T TQ
C
R
C
A
A
R
C
L
x
C
y
L
Bu
x
A
x
Q
P
B
PBR
PA
P
A
P
B
R
K
t
x
K
u
Perhatikan persamaan diatas melibatkan persamaan Riccati untuk LQR dan Kalman-Bucy filter. Penyelesaian ini memenuhi prinsip separasi, dimana penyelesaian untuk LQR dan kalman-buchy
dilakukan secara terpisah. Prinsip separasi ini sangat membantu karena disain gain kendali dan gain estimator bisa dilakukan secara terpisah. Dalam
disain ini, prinsip yang dipakai adalah bahwa pole-pole estimator terletak jauh disebelah kiri sumbu imajiner dibanding pole-pole regulator.
Hal ini adalah wajar, karena dinamika estimator lebih cepat dari regulator, karena estimator lah yang memberikan informasi state ke regulator. Nilai-eigen sistem lup tertutup nya adalah gabungan nilai-eigen kendali dan estimator yaitu:
Nilai-eigen Lup tertutup=
λ
(
A−BK)
Uλ
(
A−LC)
Pada pemilihan matrik bobot kita bisa menggunakan
aturan Bryson [6] untuk membantu mendapatkan
respon lup tertutup yang baik dengan memilih diagonal matrik bobt Q dan R sbb:
2 2
)
(
'
'
1
)
(
'
'
1
t
u
maksimum
nilai
R
t
x
maksimum
nilai
Q
i ii i ii=
=
(1)Sengaja penulis menggunakan tanda kutip pada kata maksimum,untuk memberi penekanan bahwa , meskipun aturan Bryson ini biasa memberikan hasil yang baik namun tidak ada aturan yang eksak untuk memberikan suatu spesifikasi dalam bentuk
peak-value pada matrik Q dan R. Jadi beberapa iterasi
trail-and-error diperlukan untuk menjalankan
spesifikasi ini daripada menghitung norm L2 (norm
energi)
3. Small-Gain Theorem
Perhatikan sistem umpan-balik berikut ini :
Gambar.1 Sistem Kendali Umpanbalik Dari gambar diatas didapat hubungan
1 ) ( ) (s K s < G ) ( ) ( ) ( ) (s K s G s K s G ≤
Sehingga kestabilan lup tertutup dijamin jika:
1
)
(
)
(
s
K
s
<
G
Small Gain Theorem ini menjamin bahwa stabilitas
internal yaitu bahwa semua fungsi transfer lup tertutup adalah stabil dan semua sinyal internal akan tetap terbatas (bounded) untuk input yang terbatas (bounded).
Small Gain theorem ini seringkali dipakai untuk
menjawab 2 pertanyaan seputar robust stability.
Pertama, jika ketidakpastian yang diberikan adalah
stabil dan bounded, apakah lup tertutup akan stabil untuk ketidakpastian yang diberikan? Kedua, untuk sistem plant tertentu, berapakah nilai ketidakpastian terkecil yang akan men-destabilkan sistem?
m
∆
r y
Gambar.2 Sistem Kendali dengan Ketidakpastian Multiplikatif
r y
Gambar.3 Pencarian Fungsi Transfer ’dilihat’ dari ketidakpastian
G
K
G
K
G
m∆
K
output inputGambar.4.Sistem ‘dilihat’ dari Ketidakpastian Misal kita ingin melakukan analisis kestabilan kokoh terhadap ketidakpastian multiplikatif, untuk itu lihat gambar 2- 4.
Input dan output dari blok ketidakpastian ini ditunjukkan pada gambar 3 dan blok ini mempunyai fungsi transfer :
)
(
)
(
1
)
(
)
(
)
(
s
K
s
G
s
K
s
G
s
M
+
−
=
Dengan theorema small-gain maka lup tertutup akan stabil kokoh jika memenuhi:
(
GK
)
T
GK
m1
1
1
1=
+
≤
∆
−Perhatikan bahwa penyebut pada sisi kanan ketidaksamaan….adalah complementary sensitivity T(s). Kita dapat menggunkan hasil ini untuk menjawab pertanyaan pertama. Misal ketidakpastian stabil dibatasi oleh :
γ
< ∆m
maka system lup tertutup akan stabil jika:
γ
1
<
T
atauγ
T < 1Pertanyaan kedua berkaitan dengan pencarian ukuran (size) terkecil ketidakpastian-stabil yang akan mendestabilkan system. Karena ketidakpastian harus lebih kecil dari 1/T ,maka harus lebih kecil dari minimum 1/T.Hal ini sama dengan mencari nilai maksimum T. Nilai maksimum T untuk seluruh frekuensi adalah nilai puncak dari bode plot dari sistem tsb. Maka, ketidakpastian terkecil yang akan
mendestabilkan sistem ( biasa disebut sebagai
multiplicative stability margin (MSM)diberikan
oleh: m
∆
ϖ
ϖT
j
M
dengan
M
MSM
r r(
sup
1
=
=
(2)Suatu sistem yang mempunyai MSM yang lebih besar akan mempunyai toleransi menghadapi ketidakpasian multplikatif yang lebih baik disbanding yang mempunyai MSM yang lebih kecil. Atau dengan kata lain complementary sensitivity T(s) harus bernilai kecil. Hal ini sesuai dengan sifat supresi noise yang baik namun konflik dengan sifat
tracking maupun disturbance rejection. Untuk
menangani hal ini maka harus melakukan trade-off. Sedangkan jaminan kestabilan lup tertutup (berkaitan dengan ketidakpastian aditif ) adalah jika:
γ
1
<
KS
atauγ
KS <1Kita mendefinisikan additive stability margin (ASM) sebagai : ) ( ) ( sup 1
ϖ
ϖ
ϖ K j S j ASM = (3)Dari kedua ukuran tsb diatas maka kita mencari loop
gain G(s)K(s) yang bernilai kecil pada frekuensi
tinggi dan bernilai besar pada frekuensi rendah merupaka jawaban trade-off dan merupakan ukuran kinerja nominal dari suatu perancangan sistem kendali yang baik. Selain itu, fungsi transfer ASM merupakan fungsi transfer yang biasa kita pakai untuk menentukan energi kendali (limit actuator). Dengan demikian dengan menggunkan desua margin diatas maka kita bisa menganalisis apakah suatu system kendali telah dirancang dengan memenuhi spesifikasi kinerja yang baik seperti tracking,
disturbance rejection ,noise suppression dan control energy.
4. Dinamika Model Helikopter
Dinamika model helikopter Yamaha R-50 yang dipakai dalam penelitian ini mengikuti hasil yang telah didapat Carniege Mellon Robotics Institute. Diskripsi lengkap dinamika model ini dapat dilihat
m
pada [1,3].Berbeda dengan dinamika model yang dipakai [1] yang menggunakan full-state feedback, maka dalam penelitian ini menggunakan output
feedback yang dalam disain ini berupa sinyal output
u,v, w. Perancangan sistem kendali di fokuskan hanya pada modus cruise untuk suatu tugas tracking mengikuti suatu trayektori terbang tertentu..
5. Perancangan, Analisis dan Simulasi
Seperti dalam perancangan kendali LQG pada umumnya, maka kualitas pengendalian sangat ditentukan oleh pemilihan matrik bobot baik untuk disain regulator maupun disain estimator nya. Untuk mengurangi jumlah iterasi trade-off maka dalam penelitian menggunakan aturan Bryson seperti pada persamaan (1). Dalam perancangan ini pembobotan pada cost function nya diberikan kepada output bukan pada state yang dalam hal ini u,v,w adalah komponen kecepatan dalam arah body axes x,y,z. Didalam makalah [3], model dinamika Helikopter diidentifikasi pada kondisi cruise dengan kecepatan trim nya adalah u0 = 49.2 ft/det, v0=-11 ft/det dan
w0= 0 ft/det. Mengikuti aturan Bryson maka Q
dipilih dengan harga kebalikan dari nilai trim u0,v0
dan w0. Dengan bobot-awal Q tsb maka dilakukan
iterasi trial-error dengan nilai kisaran yang tidak jauh dari bobot awal tsb.Sedangkan pada pemilihan bobot R, mengikuti [7] dengan limitasi input kendali
0 0 0 0 0 0 0 0 10 10 22 22 5 5 5 5 ≤ ≤ − ≤ ≤ − ≤ ≤ − ≤ ≤ − col ped long lat δ δ δ δ (4)
Maka bobot dipilih dengan kisaran nilai 57/nilai defleksi maksimum seperti pada persamaan (4) tsb. Berdasar pemilihan matrik bobot-awal R dan Q untuk regulator tsb kemudian dirancang suatu estimator yang mempunyai pole jauh disebelah kiri dari pole regulator yang dirancang dengan matrik bobot-awal Q dan R tsb. Dengan demikian iterasi
trial-error bisa dikurangi dengan cukup signifikan.
Berdasar perancangan tsb, kemudian dilakukan simulasi numerik untuk persoalan tracking untuk trayektori tertentu. Hasil perbandingan simulasi trayektori antara trayektori referensi dengan trayektori lup tertutup dengan sistem kendali LQG dapat dilihat pada gambar.5:
0 500 1000 1500 -500 0 500 -100 -50 0 50 100 East [ft] Flying Path [3D] North [ft] Alt it u d e [ft ] Pathref Pathout
Gambar.5 Perbandingan Trayektori
Gambar.5 menunjukkan bahwa perancangan sistem kendali LQG ini mampu mengikuti trayektori yang diinginkan dengan hasil yang cukup memuaskan. Hasil-hasil simulasi yang lebih rinci dapat dilihat pada gambar 5-8 berikut:
0 20 40 60 80 100 120 -60 -40 -20 0 20 40 60 Vx [ft /s ] X-Velocity 0 20 40 60 80 100 120 -60 -40 -20 0 20 40 60 V y [ft /s ] Y-Velocity 0 20 40 60 80 100 120 -60 -40 -20 0 20 40 60 time [s] Vz [ft /s ] Z-velocity Vzref Vzout Vxref Vxout Vyref Vyout
Gambar.6.Kinerja Tracking Kecepatan
0 20 40 60 80 100 120 -100 0 100 time [s] Xe rr or [ft ] X Position Error 0 20 40 60 80 100 120 -100 0 100 time [s] Ye rr or [ft ] Y Position Error 0 20 40 60 80 100 120 -100 0 100 time [s] Ze rr or [ft ] Z Position Error
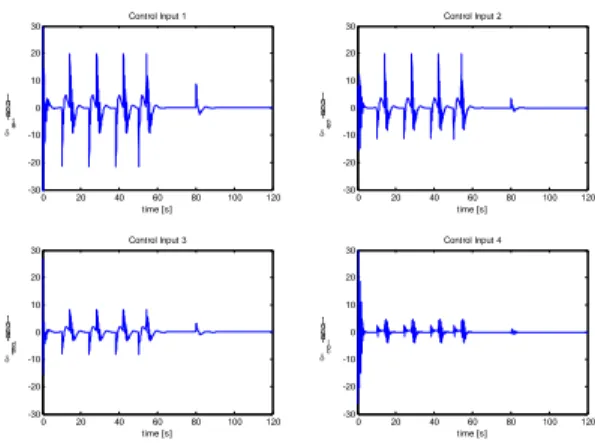
0 20 40 60 80 100 120 -30 -20 -10 0 10 20 30 time [s] δlat [d e g] Control Input 1 0 20 40 60 80 100 120 -30 -20 -10 0 10 20 30 time [s] δnlo [d e g] Control Input 2 0 20 40 60 80 100 120 -30 -20 -10 0 10 20 30 time [s] δ[dped e g] Control Input 3 0 20 40 60 80 100 120 -30 -20 -10 0 10 20 30 time [s] δ[dcol e g] Control Input 4
Gambar.8 Input Kendali
Dari gambar 6 dan 7, terlihat bahwa system kendali LQG mampu mentracking refrensi yang diberikan dengan tingkat kesalahan yang relatif kecil. Namun dalam gambar 8 terlihat bahwa, input kendali yang dihasilkan kendali LQG ini cukup besar yaitu kurang lebih 200. Hal ini sesuai dengan hasil analisis pada fungsi transfer input kendali yang dapat dinyatakan sbb:
[
( ) ( ) ( ) ) ( ) ( 1 ) ( ) ( r s d s n s S K S G S K s u − − + =]
(5)Dimana fungsi transfer loop-gain G(s)K(s) ini dapat dilihat pada gambar 9 dibawah ini:
10-8 10-6 10-4 10-2 100 102 104 -200 -150 -100 -50 0 50 100 150 200 250 Singular Values Frequency (rad/sec) Sin g ula r V alu es (d B)
Gambar 9. Fungsi Transfer Loop Gain G(s)K(s)
Pada frekuensi rendah Loop Gain bernilai besar , maka terlihat bahwa u(s) sebanding dengan 1/(G(s). sedangkan pada frekuensi tinggi G(s) mengalami
roll-off yang akan mengakibatkan input kendali u(s)
menjadi besar, oleh karena itu loop gain pada frekuensi tinggi harus bernilai kecil untuk
meminimisasi u(s). Namun dari fungsi transfer persamaan (5) yang dinyatakan dalam gambar.10, terlihat bahwa pada frekuensi rendah u(s) mengalami penguatan yang cukup besar. Hal inilah yang mengakibatkan input kendali pada gambar 8, melonjak saat belokan 900 pada trayektori berbentuk kotak seperti pada gambar.5. Belokan 900 ini bisa dipandang sebagai superposisi dari berbagai kandungan frekuensi rendah dan tinggi.Sedangkan pada saat trayektori berbentuk lingkaran gambar.8 menunjukkan bahwa untuk semua kanal input kendali bernilai kecil.
10-3 10-2 10-1 100 101 102 103 104 -80 -60 -40 -20 0 20 40 60 80 Singular Values Frequency (rad/sec) Sin g ula r V alu e s (d B)
Gambar.10 Fungsi Transfer u(s)/r(s)
Sistem kendali LQG yang telah dirancang ini ternyata mempunyai MSM dan ASM yang cukup baik yaitu
Margin Kanal u Kanal v Kanal w MSM 0.7110 0.7673 0.9864
ASM 0.7364 0.7621 1.1183
Analisis robustness ini konsisten dengan hasil pada gambar 7, dimana terlihat bahwa error yang terkecil pada terjadi kanal w dimana harga MSM dan ASM pada kanal w bernilai tinggi.
6. Kesimpulan
Dari semua hasil analisis dan simulasi ini,terlihat bahwa kendali LQG ini cukup memberikan hasil pada tingkat yang applicable namun masih membutuhkan studi lebih lanjut terutama dalam
limitasi input kendali yang dari hasil analisis dan simulasi masih cukup besar.
7. Daftar Pustaka
[1]. A.Budiyono dan Singgih S.Wibowo,”
Optimal Tracking Controller Design for A Small Scale Helicopter”, dalam review
Proceeding ITB,2005.
[2]. B.D.O Anderson dan J.B Moore,” Linear
Optimal Control”, Prentice Hall,1990
[3]. Bernard Metler, Mark B. Tischler, dan Takeo Kanade,” System identification Modeling of
a Small-Scale Unmanned Rotorcraft for Flight Control Design”, Journal of American
Helicopter Society,Vol 47,pp 50-63,Jan 2002. [4]. Hyunchul Shim,” Hierarchical Flight
Control System Synthesis for Rotorcraft-based Unmanned Aerial Vehicles”, PhD
Thesis University of California,Berkeley,2000.
[5]. J.C Doyle dan G.Stein, ”Robustness with
Observers”, IEEE Trans.Automatic
Control,Vol 24,pp 607 -611,1979.
[6]. Ricardo S.Sanchez dan Mario Sznaier,”
Robust System : Theory and Application”,John Wiley and Sons,1998.
[7]. V.Gavrilets, M.Martines, B.Mettler and E.Feron, ”Control Logic for Automated
Aerobatic flight of miniature Helicopter”, in
proceedings of the AIAA Guidance,Navigation,and Control Conference (Monterey,CA),August 2002.
[8]. W.L.Brogan,” Modern Control Theory”, Prentice Hall,3rd Edition,1991.