DASAR TEKNIK TENAGA LISTRIK
PUTU RUSDI ARIAWAN
(0804405050)
JURUSAN TEKNIK ELEKTRO
FAKULTAS TEKNIK UNIVERSITAS UDAYANA
DENPASAR
MATERI KULIAH
DASAR TEKNIK TENAGA LISTRIK I
ELEMEN SISTEM TENAGA:
SISTEM TENAGA LISTRIK:
Pusat Pembangkit:
Pusat pembangkit berfungsi untuk mengkonversikan sumber daya energi primer menjadi energi listrik.
a. Pusat Listrik Tenaga Uap (PLTU) : minyak, gas alam, batubara b. Pusat Listrik Tenaga Air (PLTA)
c. Pusat Listrik Tenaga Gas (PLTG) d. Pusat Listrik Tenaga Diesel (PLTD) e. Pusat Listrik Tenaga Panas Bumi (PLTP) f. Pusat Listrik Tenaga Nuklir (PLTN).
Dikembangkan alternatif sumber daya energi baru : Biomassa, limbah kayu, angin, gelombang laut
KONVERSI ENERGI ELEKTROMEKANIK:
TRANSMISI DAN DISTRIBUSI:
KARAKTERISTIK BEBAN:
Proteksi:
- Pengaturan pemakaian sekering (Fuse) - Pemutus daya (Circuit Breaker)
ELEKTROMAGNETIK:
• Medan Magnet dan Medan Listrik
- Medan magnet terbentuk dari gerak elektron
- Medan magnet memiliki arah, kerapatan dan intensitas → garis-garis fluks → Φ (fluks) → weber
- Kerapatan medan magnet dinyatakan dengan garis fluks yang menembus suatu luas bidang tertentu dan mempunyai simbol : B → weber/m2
- Intensitas medan magnet disebut juga : Kuat Medan dan dinyatakan dengan besarnya fluks sepanjang jarak tertentu dan mempunyai simbol : H → Ampere/m
- Kerapatan medan B dan kuat medan H mempunyai besaran dan arah (vektoris) yaitu : B = μH dimana μ(permeabilias) → henry/m
Untuk permeabilitas pada ruang bebas(udara), μ0 = 4πx10-7 H/m - Besaran fluks dapat juga dinyatakan dengan : Φ = ⌠B dA
dimana : dA = unsur luas
Hubungan antara medan listrik dan medan magnet dinyatakan oleh Hukum Ampere. Dengan persamaannya : N i = H l Ampere-turn
Dimana :
N = jumlah lilitan i = arus listrik (A) H = kuat medan (A/m) l = panjang jalur (m)
Induksi Tegangan – Hukum Faraday:
Apabila medan magnet berubah-ubah terhadap waktu mengakibatkan arus bolak- balik yang berbentuk sinusoida yang akan membangkitkan atau menginduksi medan listrik:
- Medan magnet atau fluks yang berubah-ubah pada inti besi menghasilkan gaya gerak listrik (ggl) sebesar :
dt d dt d N e
- Perubahan fluks yang menghasilkan gaya gerak listrik dapat terjadi karena :
a. Perubahan fungsi waktu (t) akibat arus bolak-balik yang berbentuk sinusoida
b. Fungsi putaran (θ) akibat berputarnya rotor pada mesin-mesin dinamis - Hukum Faraday dapat dituliskan sebagai berikut :
BdA dt d EdlKonsep Rangkaian Magnet:
- Arus listrik (i) yang dialirkan melalui penghantar yang dibelitkan pada inti besi yang berbentuk cincin toroidal akan menghasilkan medan magnet yang sebanding dengan jumlah lilitan (N) dikalikan dengan besaran arus listrik (i)
- Ampere – turn (Ni) ini dikenal dengan Gaya Gerak Magnet (ggm) dan dinyatakan dengan notasi F
F = N i ampere-turn
- Gaya gerak magnet adalah perbedaan potensial magnet yg cenderung menggerakkan fluks di sekitar cincin toroidal
- Gerak fluks di sekitar cincin selain ditentukan oleh besaran ggm juga merupakan fungsi dari tahanan inti besi yang membawa fluks tersebut
Φ = F / R
- Reluktansi berbanding lurus dengan panjang (l) berbanding terbalik dengan penampang luas bidang (A) dan bergantung pada bahan magnetik rangkaian magnet tersebut, dimana besaran l dalam meterr dan A dalam meter persegi :
R = l/μA ampere-turn/weber
Adanya analogi antara hubungan rangkaian magnet dan hubungan rangkaian listrik
R = F / Φ = l / μA → R = V / I = 1 / σA
KURVA MAGNETISASI:
Hubungan antara sifat magnetik suatu bahan dengan permeabilitas dapat ditunjukkan dengan kurva kerapatan fluks B sebagai fungsi dari kuat medan H yang biasa dikenal dengan Kurva B-H atau Kurva Magnetisasi
Kurva B-H hanya dipengaruhi oleh jenis bahan yang dipakai dan tidak tergantung pada dimensi bahan tersebut.Apabila diketahui harga ampere-turn Ni dan harga panjang rata-rata jalur fluksi maka harga kuat medan Ni/l jatuh pada sumbu horizontal dan secara grafik dengan mudah dapat ditentukan kerapatan fluksi B yang terletak pada sumbu ordinat tegak. Karena H = Ni/l dan B = Φ/A maka
terlihat bahwa kuat medan (H) sebanding dengan gaya gerak magnet (Ni) dan kerapatan fluks (B) sebanding dengan garis fluks (Φ)
INTENSITAS MEDAN MAGNET:
Dalam proses konversi energi yang menyangkut mesin dengan elemen bergerak (berputar) seperti transduser atau motor pada inti besinya (core) akan terdapat celah udara. Melalui celah udara ini dapat berlangsung proses konversi dari nergi listrik ke energi mekanik atau sebaliknya
Untuk inti yang bercelah udara berlaku hubungan: Ni = Hclc + Hgg Ni = B I B g o g c c c Ni = o gc g c c c A A I
Di mana Ni = F adalah gaya gerak magnet (ggm) dan koefisien di sebelah kanan dikenal sebagai Reluctance R
Karena Rc = c c c A I dan Rg = g o g A o maka Ni = Φ(Rc + Rg) = F
Oleh karena pada umumnya μc >> μ0 maka sebagian besar rangkaian magnet hanya dipengaruhi oleh reluktansi celah udara (Rg). Dapat disimpulkan bahwa sebagian besar ggm terkonsentrasi pada celah udara yang merupakan potensi energi untuk proses konvensi
ENERGI DLM MEDAN MAGNET :
Energi listrik yang diberikan oleh sumber akan digunakan oleh inti besi beserta belitannya untuk menghasilkan medan magnet
Energi yang diperoleh akan tersimpan dalam medan magnet yang ditimbulkan
dWE = dWF
Sedangkan
dWF = i dλ = F dΦ
Jadi energi yang tersimpan pada medan magnet adalah:
WF =
0 ) ( o d d iPersamaan diatas mengandung arti bahwa besarnya energi yang tersimpan dalam medan magnet merupakan suatu luas daerah tertentu dimana luas daerah tersebut ditentukan oleh jenis bahan pemagnetan inti
Pada Bahan Feromagnet, hubungan antara F dan Φ tidak linier. Dari gambar a, diketahui bahwa untuk kurva menaik oa, jumlah energi yang dibutuhkan sama dengan luas daerah oac. Apabila harga F dikembalikan ke harga nolnya (kurva menurun ab) sebagian energi yang besarnya sama dengan luas daerah abc akan dilepaskan sedangkan energi sebesar luas daerah oab hilang sebagai panas (rugi histeresis). Siklus penuh rugi histerisis akan membentuk suatu gelang (lingkar tertutup) seperti pada gambar b.
dt d Ri V
Untuk rangkaian listrik R – L dengan tegangan jepit V, berlaku dt d i R V . Atau
Artinya : Kerja yang dilakukan = panas yang hilang + energi yang tersimpan Energi dalam medan magnet adalah
Dimana Ni = Hclc dan dΦ = Ac dB
Jadi Ni dΦ = (Hclc )(Ac dB) = (lcAc)H dB lcAc → volume inti magnet Energi tersimpan per unit volume adalah
Persamaan diatas mengandung arti bahwa energi dalam medan magnet ditentukan oleh luas daerah yang dibatasi antara kurva magnetisasi dan sumbu B atau luas daerah oac pada gambar
Fasor Gelombang Sinusoida:
Fasor menyatakan transformasi dari fungsi waktu ke dalam bidang kompleks yang mengandung informasi tentang amplitudo dan sudut fasa. Misalnya sebuah bilangan kompleks K, mempunyai besaran A dan arah sudut θ (lihat gambar)
K = a + jb atau K = M (cos θ + j sin θ) Dengan menggunakan Dalil Euler : cos θ + j sin θ = ejθ Maka : K = M ejθ d i dt Ri dt Vi 2 2 1 2 1 2 2 1 t tid t t Ri dt t tVidt 0 0 2 1 d Ni d i t tid F W BHdB c A c l F W F W 0
Perhatikan bahwa j adalah operator yaitu operator khayal. Dimana bekerjanya operator ini dengan memutar suatu bilangan atau nilai tertentu π/2 derajat
erlawanan arah jarum jam. Meskipun j bukan merupakan bilangan namun j dapat dinyatakan dengan nilai . Artinya bila operator bekerja sebanyak 2 kali maka harga bilangan tersebut berputar 2 x π/2 = 1800 sehingga :
j(jb) = j2b = - b ; atau j2 = - 1 j(j2b) = j3b = - jb atau j3 = - j j(j3b) = j4b = + b atau j4 = + 1
Bentuk K = M e jθ disebut dengan bentuk Polar atau eksponensial dari bilangan kompleks K yang juga dapat ditulis : K = M θ ; Dimana : 2 2
b a
M
Analisa vektor yang berputar pada selang waktu tertentu inilah disebut Analisa Fasor. Analisa fasor yang dikaitkan dengan bentuk gelombang sinusoidal akan memungkinkan penggambaran fasor sinusoidal yang sangat penting pada bidang elektroteknik
Arus dan tegangan sesaat dari suatu bentuk sinusoidal dalam suatu periode waktu, dapat dijelaskan dengan persamaan :
i(t) = Im cos (ωt +Φ)
v(t) = Vm cos (ωt )
Dimana :
Im = arus maksimum dalam ampere
ω = 2πf = kecepatan sudut dalam radial/detik Φ = sudut fasa dalam radial
Dari vektor Im dan Vm pada salib sumbu x dan y dapat ditentukan besar v(t) dan
i(t) untuk t=0 dengan cara memproyeksi vektor-vektor tersebut pada sumbu x. Jika vektor Im dan Vm berputar berlawanan arah jarum jam dan memiliki
kecepatan sudut yang sama, maka harga sesaat arus dan tegangan dari suatu rangkaian dapat dihitung .
Im dan Vm adalah fasor (lihat gambar)
Fasor tegangan dan arus dapat ditulis sebagai berikut : Tegangan = V Φ
Arus = I Φ
Dimana V dan I adalah harga RMS (root-mean-square).Jika Vm adalah harga
tegangan maksimum maka harga RMS tegangan tersebut adalah :
2
m V V
Daya Rata-rata:
Daya rata-rata sesaat didefinisikan sebagai hasil perkalian tegangan dan arus sesaat serta dapat ditulis sebagai berikut :
p = v i
Jika arus dan tegangan merupakan fungsi siklus, maka daya rata-rata (P) untuk suatu periode siklus dapat ditentukan besarnya dengan rumus :
P =
T o dt t P T ( ) 1 DimanaP = daya rata-rata dalam watt T = periode dari siklus dalam detik
Tegangan dan arus fungsi sinus dinyatakan sebagai : v(t) = Vm cos ωt
i(t) = Im cos (ωt – Φ)
Maka persamaan daya menjadi : p(t) = VmIm cos ωt cos (ωt – Φ)
p(t) = VmIm ½ [cos (ωt – ωt + Φ) + cos (ωt + ωt – Φ)]
= ½ VmIm cos Φ + ½ VmIm cos (2ωt – Φ)
Harga rata-rata dari fungsi sinusoidal yang berubah terhadap waktu untuk satu periode adalah sama dengan nol sehingga persamaan p(t) hanya terdapat bentuk ½ VmIm cos Φ yang tidak tergantung terhadap waktu dan dapat ditulis :
P = ½ VmIm cos Φ = V I cos Φ
Dimana V dan I adalah harga rms atau harga efektif dari tegangan dan arus. Harga efektif arus sesaat i(t) dapat didefinisikan dalam persamaan
Dengan memperhatikan bahwa harga I (rms) adalah akar dari arus sesaat kwadrat maka : 2 1 0 2
1
TI
dt
T
I
Dimana T = 1/f = 2π/ω . Oleh karena harga rata-rata dari fungsi sinusoidal yang berubah terhadap waktu sama dengan nol dalam 1 periode maka:
Sehingga harga rms dari setiap fungsi sinusoidal adalah harga maksimum dibagi dengan √2.
Faktor Daya:
Daya rata-rata bukan fungsi rms dari arus dan tegangan saja tetapi ada unsur perbedaan sudut fasa arus dan tegangan
Jika arus dan tegangan dari persamaan sefasa dan Φ = 00
maka persamaan daya menjadi : P = V I cos Φ = V I
Arus yang mengalir pada sebuah tahanan akan menimbulkan tegangan pada tahanan tersebut sebesar : Vr = Ir r
Sehingga : P = Vr Im cos Φ
Karena tidak adanya beda fasa antara arus dan tegangan pada tahanan maka sudut Φ=00
sehingga P = V I
Untuk induktor dan kapasitor, arus yang mengalir pada elemen-elemen ini masing-masing akan tertinggal dan mendahului sebesar 900 terhadap tegangan
VL = IL jωL Vc = c c j I
12 0 2 2 cos 1
T dt t I T I
12 2 0 22
2
cos
2
1
2
1
2
dt
t
I
m 2 1 2 0 2 1 2
dt I I m
2 2 2 1 2 2 1 m m I I Dimana VL ,Vc ,IL , IC adalah besaran fasor. Daya rata-rata elemen ini adalah nol
Tegangan dikalikan dengan arus disebut Daya Semu. Daya Rata-rata dibagi daya nyata disebut : Faktor Daya
Faktor Daya = Cos Φ =
VI VI VI
P cos
Φ dinamakan sudut faktor daya. Dimana sudut ini menentukan kondisii mendahului atau tertinggalnya tegangan terhadap arus.
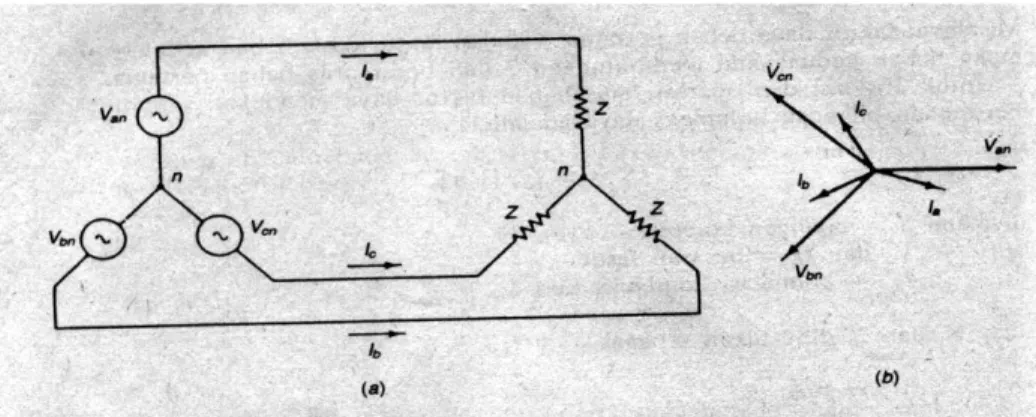
Perhitungan Tiga Fasa:
Sistem tiga fasa memiliki besar yang sama ( tegangan atau arus) tetapi mempunyai perbedaan sudut sebesar 1200 antar fasanya. Sistem ini juga disebut sistem seimbang.
Gambar diatas memperlihatkan sebuah rangkaian sederhana dan diagram fasor sebuah sistem seimbang. Sistem pada gambar diatas juga disebut Sistem Urutan abc.Dimana fasa b tertinggal 1200 terhadap fasa a, dan fasa c tertinggal 1200 terhadap fasa b. Beban pada gambar dihubungkan dengan cara hubungan Y. Dalam hubungan Y ini, tegangannya adalah tegangan saluran netral dan arus yang mengalir pada tiap fasa beban adalah arus saluran. Tegangan antara masing-masing saluran dapat dihitung sebagai berikut :
Vab = Van + Vnb = Van – Vbn
Vbc = Vbn – Vcn
Secara matematis dari gambar untuk urutan fasa abc dapat dijelaskan sebagai berikut :
Vab = Van √3 300
Vbc = Vbn √3 300
Vca = Vcn √3 300
Masing-masing tegangan saluran mendahului 300 dan √3 kali besar terhadap tegangan saluran netral. Sehingga urutan fasa acb persamaan diatas akan menjadi :
Vab = Van √3 - 300
Vbc = Vbn √3 - 300
Vca = Vcn √3 - 300
Daya yang digunakan pada masing-masing fasa pada beban adalah : P1Φ = │Van│I1 cos Φ
Dimana
I1 = Ia
cos Φ = faktor daya
Untuk sistem yang seimbang, daya total yang dipergunakan adalah : PT = P3Φ = 3 │Van│I1 cos Φ = 3 3 H V I1 cos Φ = √3 VH I1 cos Φ Dimana :
I1 = arus saluran ke saluran
Beban pada gambar terhubung delta (Δ) dimana tegangan pada hubungan delta ini adalah tegangan saluran ke saluran. Hubungan antara arus saluran dengan arus yang mengalir pada beban dapat dilihat :
Ia = Iab + Iac = Iab – Ica
Ib = Ibc – Iab
Ic = Ica – Ibc
Hubungan antara arus kawat pada hubungan delta untuk urutan fasa abc dan
acb dapat dijelaskan dengan persamaan berikut :
Ia = Iab √3 - 300
Ib = Ibc √3 - 300
Ic = Ica √3 - 300
Untuk urutan fasa abc, arus saluran √3 kali arus fasa dan tertinggal 300 arus fasa
Ia = Iab √3 300
Ib = Ibc √3 300
Ic = Ica √3 300
Untuk urutan fasa acb arus mendahului 300 terhadap arus fasa :
P1Φ = VH │Iab│cos Φ
Dimana : VH = tegangan Vab
cos Φ = faktor daya
Untuk sistem yang seimbang daya total yang dikonsumsikan ke beban adalah : PT = 3 P1Φ = 3 VH │Iab │cos Φ = 3 VH 3 1 cos Φ = √3 VH I1 cos Φ
Dimana I1 = arus saluran
Jika tegangan saluran, arus saluran dan cos Φ diketahui maka daya yang dikonsumsikan dapat dihitung tanpa perlu mengetahui bentuk hubungan dari beban tersebut.
Dengan penurunan yang sama dapat diketahui : │ST│ = √3 VHI1
QT = √3 VHI1 sin Φ
TRANSFORMATOR:
Transformator adalah suatu alat listrik yang dapat memindahkan dan merubah energi listrik dari atau lebih rangkaian listrik ke rangkaian listrik yang lain melalui suatu gandengan magnet dan berdasarkan prinsip induksi-elektromagnet.
Transformator dapat dikelompokkan berdasarkan : 1. Frekwensi
- frekwensi daya ( 50 – 60 c/s)
- frekwensi pendengaran (50 c/s – 20 kc/s) - frekwensi radio (di atas 30 kc/s)
2. Pemakaian di bidang tenaga listrik - Transformator daya
- Transformator distribusi
KEADAAN TRANSFORMATOR TANPA BEBAN:
Bila kumparan primer suatu tranformator dihubungkan dengan sumber tegangan V1 yang sinusoida maka akan mengalir arus primer I0 yang juga sinusoida dan
dengan menganggap belitan N1 reaktif murni maka I0 akan tertinggal 900 dari V1.
Arus primer I0 menimbulkan fluks (Φ) yang sefasa dan juga berbentuk sinusoida :
Φ = Φmaks sin ωt
Fluks sinusoida ini akan menghasilkan tegangan induksi e1 (Hukum Faraday)
e1 = - N1 dt d e1 = - N1 dt t d(makssin ) = - N1 ω Φmaks Cos ωt Harga efektif : E1 = 2 2 1 f maks N
= 4.44 N1f Φmaks
Pada rangkaian skunder, fluks(Φ) bersama menimbulkan : e2 = - N2
e2 = - N2 ω Φmaks Cos ωt
E2 = 4.44 N2f Φmaks
KEADAAN TRANSFORMATOR BERBEBAN:
Apabila kumparan sekunder dihubungkan dengan beban ZL, I2 mengalir pada
kumparan sekunder. Arus I2 ini akan menimbulkan gaya gerak magnet N2I2 yang
cenderung menentang fluks bersama (ΦM ) sebagai akibat arus pemagnetan (IM)
Agar ΦM tidak berubah, pada kumparan primer harus mengalir I2’ yang
menentang fluks yang dibangkitkan oleh arus beban. Sehingga arus yang mengalir pada kumparan primer menjadi :
I1 = I0 + I2’
Bila rugi besi diabaikan maka I0 = IM
I1 = IM + I2’
Untuk menjaga agar fluks tidak berubah sebesar ggm yang dihasilkan oleh arus pemagnetan IM berlaku hubungan :
N1IM = N1I1 – N2I2
N1IM = N1(IM + I2’) – N2I2
Sehingga
N1I2’ = N2I2
Karena IM ≈ kecil maka I2’ = I1
RANGKAIAN EKIVALEN:
Bahwa tidak semua fluks (Φ) yang dihasilkan oleh arus pemagnetan IM merupakan fluks bersama (ΦM) karena sebagian darinya hanya mencakup kumparan primer (Φ1) atau kumparan sekunder (Φ2) saja. Dalam rangkaian ekivalen yang digunakan untuk menganalisa kerja suatu transformator, adanya fluks bocor ini (Φ1 dan Φ2) ditunjukkan sebagai reaktansi X1 dan X2 sedangkan rugi tahanan ditunjukkan dengan R1 dan R2.
Model rangkaian ekivalen :
Dari model rangkaian sebelumnya didapat hubungan penjumlahan vektor : V1 = E1 + I1R1 + I1X1 E2 = V2 + I2R2 + I2X2 E1 = a E2 E1 = a (I2ZL + I2R2 + I2X2) Karena, I2 = a I2’ E1 = a2 I2’ ZL + A2i2’ R2 + a2I2’X2 V1 = a2 I2’ ZL + a2I2’ R2 + a2I2’X2 + I1R1 + I1X1
Persamaan ini mengandung pengertian bahwa apabila parameter rangkaian sekunder dinyatakan dalam harga rangkaian primer, maka harganya perlu dikalikan dengan faktor a2
Sehingga rangkaiannya menjadi:
PENENTUAN PARAMETER:
Parameter transformator yang terdapat pada model rangkaian ekivalen dapat ditentukan besarnya dengan dua macam pengukuran ( test ) yaitu :
1. Pengukuran Beban Nol
Dalam keadaan tanpa beban, bila kumparan primer dihubungkan dengan V1 maka hanya I0 yang mengalir. Dari pengukuran P1, I0 dan V1
diperoleh :
2. Pengukuran Hubung Singkat
Hubung singkat berarti ZL = 0 sehingga Zek = Rek + jXek yang membatasi arus.
Karena Rek dan Xek ≈ kecil maka harus dijaga agar Vhs kecil sehingga arus yang
dihasilkan tidak melebihi arus nominal
1 2 1 P V Rc m c c m jX R R jX I V Z 0 1 0
Dengan mengukur Vhs Ihs dan Phs diperoleh :
PENGATURAN TEGANGAN:
Pengaturan tegangan transformator adalah perubahan tegangan sekunder antara beban nol dan beban penuh pada faktor kerja tertentu dengan tegangan primer konstan
Pengaturan =
Dengan model rangkaian ( harga sekunder ditransformasikan ke harga primer)
Pengaturan = Dari rangkaian diatas
aV2nL = V1
aV2fL = harga tegangan nominal (tegangan nominal primer)
KERJA PARALEL:
Pertambahan beban pada suatu saat menghendaki adanya kerja paralel diantara tranformator. Tujuan kerja paralel adalah agar beban yang dipikul sebanding dengan kemampuan KVA masing-masing transformator sehingga tidak terjadi pembebanan lebih dan pemanasan lebih
Syarat kerja paralel :
1. Perbandingan tegangan harus sama
jika perbandingan ≠ → tegangan induksi pada kumparan sekunder ≠ → menyebabkan terjadi arus pusar pada kumparan sekunder ketika dibebani → timbul panas pada kumparan sekunder
2 hs hs ek I P R fL fL nL V V V 2 2 2 fL fL nL aV aV aV 2 2 2 ek ek hs hs ek R jX I V Z 2. Polaritas transformator harus sama
3. Tegangan impedansi pada keadaan beban penuh harus sama 4. Perbandingan reaktansi terhadap tahanan sebaiknya sama
Apabila perbandingan R/X sama maka kedua transformator akan bekerja pada faktor kerja yang sama
RUGI-RUGI DAN EFISIENSI:
• RUGI-RUGI:
Rugi tembaga (Pcu)
Rugi tembaga adalah rugi yang disebabkan oleh arus beban yang mengalir pada kawat tembaga, dapat ditulis:
Pcu = I2R
Karena arus beban berubah-ubah maka rugi tembaga juga tidak konstan tergantung pada beban
Rugi Besi (Pi)
Rugi besi terdiri dari :
1. Rugi Histeresis
rugi yang disebabkan oleh fluks bolak-balik pada inti besi, dinyatakan dengan:
Ph = Kh f Bmaks
2. Rugi arus Eddy
Rugi yang disebabkan oleh arus pusar pada inti besi, dirumuskan : Pe = Ke f2 B2maks
Kh, Ke = konstanta
Sehingga rugi besi (rugi inti) adalah : Pi = Ph + Pe
• EFISIENSI
Efisiensi dinyatakan sebagai :
dimana Σ rugi = Pcu + Pi
a. Perubahan Efisiensi terhadap Beban
Perubahan efisiensi terhadap beban dinyatakan sebagai berikut ;
agar η maksimum, maka : 1 0
2 2 2 2 I P R I dI d i ek jadi
artinya: untuk beban tertentu, efisiensi maksimum terjadi ketika rugi tembaga = rugi inti
b. Perubahan Efisiensi terhadap Faktor Kerja (Cos Φ) Beban Perubahan efisiensi terhadap faktor kerja (Cos Φ) beban dapat dinyatakan: masuk daya rugi rugi keluar daya keluar daya keluar daya masuk daya 1 2 2 2 2 2 I P R I Cos V Cos V i ek cu ek i i ek P I R P I P R 2 22 2 2 2 rugi Cos I V rugi 2 2 1 2 2 2 2 2 2 1 I V rugi Cos I V I V rugi
Bila Σrugi/V2I2 = X = konstan
Maka:
TRANSFORMATOR TIGA PHASA:
Transformator tiga phasa digunakan karena pertimbangan ekonomi. Ini dikarenakan pemakaian inti besi pada transformator tiga phasa lebih sedikit dibandingkan dengan pemakaian tiga buah transformator phasa tunggal.
Pada bidang abcd pada gambar a hanya diperlukan mengalir fluks sebesar dan dari gambar b adalah : A
2 3
. Apabila digunakan transformator fasa
tunggal, akan mengalir fluks sebesar A
2 1
dan B
2 1
. Jadi pemakaian inti besi jelas menunjukkan penghematan pada transformator tiga phasa. Penghematan lebih besar bila kita mengubah polaritas transformator sedemikian rupa sehingga arah keatas. Dengan arah ke atas, fluks yang mengalir pada bidang abcd menjadi 2 2 B A
dan besaran vektornya A
2 1
. Dengan sistem pendinginan yang lebih maju, membuat transformator tiga phasa lebih ekonomis.
X Cos X 1 Cos X Cos X 1 1
HUBUNGAN DELTA:
Tegangan transformator tiga phasa dengan kumparan yang dihubungkan secara delta yaitu VAB VBC dan VCA masing-masing berbeda fasa 1200 :
VAB + VBC + VCA = 0
Untuk beban yang seimbang : IA = IAB – ICA
IB = IBC – IAB
IC = ICA – IBC
Dari vektor diagram (pada gambar) diketahui bahwa IA (arus jala-jala) = √3 x IaB (arus fasa). Tegangan jala-jala dalam hubungan delta samadengan tegangan fasanya
VA hubungan delta = VpIp =
AUTO TRANSFORMATOR:
Suatu transformator fasa tunggal dengan perbandingan lilitan 3:1 akan menjadi suatu ototransformator apabila sebagian kumparan primernya merupakan bagian dari kumparan skundernya
L L L L V L L V 3 3 3
Pada ototransformator terlihat bahwa arus dibagian kumparan ef adalah = 300A-100A = 200A. Sedangkan pada transformator fasa tunggal biasa keseluruhan arus yang mengalir pada bagian kumparan primer dan skunder adalah = 100A+300A = 400 A. Dengan demikian terdapat penghematan tembaga pada ototransformator karena berkurangnya arus yang mengalir pada bagian kumparan ef . Ototranformator mempunyai juga kelemahan, dengan adanya hubungan konduktif antara kumparan tegangan tinggi dan tegangan rendah sehingga kesalahan meletakkan tegangan tinggi menjadi tegangan rendah dapat mengakibatkan kerusakan.
TRANSFORMATOR ARUS:
Transformator arus digunakan untuk mengukur arus beban suatu rangkaian
Dengan menggunakan transformator arus maka arus beban yang besar dapat diukur hanya dengan menggunakan alat ukur (ammeter) yang tidak terlalu besar Dengan mengetahui perbandingan transformator N1/N2 dan pembacaan I2, arus
beban I1 dapat dihitung dengan menganggap transformator ideal yaitu :
I1 = I2
Untuk menjaga fluks tetap maka perlu diperhatikan agar rangkaian skunder selalu tertutup.
2 1
N N
TRANSFORMATOR TEGANGAN:
Transformator tegangan digunakan untuk mengukur tegangan.
Dengan mengetahui N1, N2 dan tegangan V2 serta menganggap transformator
adalah ideal maka tegangan V1 adalah :
V1 = V2
Pentanahan pada rangkaian skunder diperlukan untuk mencegah adanya beda potensial yang besar antara kumparan primer dan sekunder (antara titik a dan b) pada saat isolasi kumparan primer rusak
MESIN DC
Generator adalah sebuah mesin listrik yang dapat mengubah daya mekanis menjadi daya listrik.
Prinsip kerja :
Jika sepotong kawat terletak diantara kutub-kutub magnet kemudian kawat tersebut kita gerakkan maka ujung kawat ini timbul gaya gerak listrik karena induksi. Arah dari ggl sesuai dengan aturan tangan kanan (lihat gambar)
2 1
N N
Dari gambar b menjelaskan bahwa bila arah gerak kawat dibalik maka arah ggl juga membalik. Jika kumparan yang terletak diantara kutub-kutub magnet kita putar dengan kecepatan putar (ω) yang tetap maka pada tiap-tiap perubahan kedudukan dari kumparan ini untuk besaran ggl induksinya akan berbeda-beda (lihat gambar)
Pada posisi A, besar fluks magnet yang tercakup oleh kumparan adalah Φsin ωt. Dengan berputarnya kumparan pada kecepatan tetap, maka besar ggl induksi setiap saat diujung-ujung kumparan adalah :
e = ωΦ sin ωt
Berdasarkan persamaan diatas besarnya ggl pada saat t= 0,1,2,3,4 didapat :
waktu ggl induksi 0 0 1 maks 2 0 3 min 4 0
Dalam bentuk pulsa ggl induksi yang timbul di ujung-ujung kumparan seperti pada gambar: dt t d e cos
Untuk mengalirkan ggl induksi bolak-balik diujung-ujung kumparan jangkar ke beban generator, dipakai dua cincin yang ikut berputar dengan kumparan dan pada cincin di pasang sikat arang yang tidak ikut berputar dengan kumparan tersebut:
Untuk memperbesar ggl induksi yang terjadi pada ujung kumparan jangkar dapat dilakukan dengan membelitkan beberapa kumparan yang dialiri arus listrik pada kutub-kutub magnet generatornya (lihat gambar):
Untuk mendapat tegangan atau arus searah yang dialirkan ke beban generator, maka kedua cincin itu diganti dengan satu cincin belah (lihat gambar):
Cincin belah ini sering disebut dengan Komutator dan masing-masing belahannya disebut Lamel. Pada gambar a sisi kumparan ab tersambung pada
lamel e, sedangkan sisi kumparan cd tersambung pada lamel f. Jika kumparan berputar searah jarum jam, maka kumparan pada kedudukan ini lamel e berpolaritas negatif. Sedangkan lamel f berpolaritas positif (aturan tangan kanan) Gambar b kumparan telah berputar searah jarum jam sebesar 900 terhadap kedudukan kumparan pada gambar a . Pada keadaan ini lamel e dan f tidak bermuatan listrik ( beban lampu padam) .
Gambar c kedudukan kumparan telah berputar sebesar 1800 terhadap kedudukan kumparan pada gambar a . Dalam keadaan ini beban lampu menyala dengan lamel e dan f berpolaritas sama dengan keadaan pada gambar a .
Dalam bentuk pulsa, ggl induksi dari generator dengan pemasangan cincin belah pada ujung-ujung kumparan dapat digambarkan sebagai berikut:
RANGKAIAN LISTRIK GENERATOR DC:
Pada umumnya bentuk rangkaian listrik dari generator dc digambar sebagai berikut:
Disebut sebagai Generator DC dengan penguatan medan terpisah karena arus listrik yang mengalir melalui kumparan medan penguat diambilkan dari sumber listrik lain bukan dari sumber listrik generator DC tersebut.
Sesuai dengan hukum Kirchoff maka : Ea = Vt + IaRa
Dimana :
Ea = ggl induksi kumparan jangkar
Vt = Tegangan output terminal
Ia = Arus jangkar Ra = tahanan jangkar
Macam-macam Generator DC
Generator DC Generator DC dengan penguat Medan Generator DC tanpa Penguat Medan Generator DC Penguat Medan Terpisah Generator DC Penguat Medan Sendiri Generator DC Seri Generator DC Shunt Generator DC Kompon Generator DC Kompon Pendek Generator DC Kompon PanjangGenerator Penguat Sendiri:
Yang dimaksud generator penguat sendiri adalah : arus listrik yang dialirkan melalui kumparan penguat medan Rf yang diambil dari output generator tersebut.
Ada tiga generator penguat sendiri yaitu: a. Generator Shunt
b. Generator Seri c. Generator Kompon
a. Generator Shunt
Ciri utama generator shunt adalah kumparan penguat medan dipasang paralel terhadap kumparan jangkar. Gambar rangkaian listrik dari generator shunt:
Dari gambar berlaku persamaan persamaan: Vt = Ish Rsh = IL ZL
Ea = IaRa + Vt
= IaRa + IshRsh
Pa = Ea Ia
Pout = Vt IL (daya beban penuh jika IL = arus beban penuh)
b. Generator Seri
Untuk mendapatkan arus penguat yang besar agar fluks magnet yang dibangkitkan oleh kumparan medan menjadi besar, maka diameter kawat kumparan medan dipilih yang besar. Untuk hal tersebut kumparan medan disambung seri dengan tahanan jangkar (lihat gambar).
Dengan diameter kawat kumparan cukup besar, maka kumparan ini akan memakan ruangan rotor. Dari gambar diatas berlaku persamaan :
Ea = IaRa + IaRs + Vt
IL = Ia
Pout = Vt IL
Pa = Ea Ia
Kelemahan generator seri adalah tegangan output (terminal) tidak stabil karena arus beban IL berubah-ubah sesuai dengan beban yang dipikul . Hal ini menyebabkan fluks magnet yang dihasilkan oleh kumparan medan seri tidak stabil. Keuntungan generator seri adalah daya output menjadi besar.
c. Generator Kompon
Upaya untuk mengurangi kelemahan yang terjadi pada generator shunt maupun generator seri, maka dibuatlah generator Kompon.
Pada generator kompon panjang berlaku persamaan : Vt = Ish Rsh
Ea = IaRa + IaRs + Vt + Vs
EaIa = Ia2 Ra + Ia2Rs + VtIa + VaIa
Pada generator kompon pendek berlaku persamaan : Ea = IaRa + Vsh + Vs atau : Ea = IaRa + ILRs + Vt + Vs Vsh = IshRsh Pout = Vt IL dimana :
Vs = jatuh tegangan pada sikat
VsIa = rugi daya pada sikat
Ia2Ra = rugi daya pada jangkar
Ia2Rs = rugi daya pada kumparan medan seri
IshRsh = rugi daya pada kumparan medan shunt
Generator DC Tanpa Beban:
Karakteristik beban nol dari generator dengan penguat medan terpisah baik generator shunt maupun generator seri dapat dilihat pada gambar :
Karakteristik tersebut dapat dibuat sebagai berikut :
Mesin dijalankan pada kecepatan putar tetap dan emf beban nol yang dibangkitkan pada ujung-ujung kumparan jangkar diukur tegangannya dengan voltmeter. Pengukuran arus penguat medan dimulai dari nol dan selangkah demi selangkah dinaikkan, sehingga akhirnya diperoleh grafik dari hubungan antara If
(arus penguat medan) dan Ea (emf jangkar) atau fluks penguat medan
jangkar sudah ada harganya, hal ini disebabkan adanya magnet sisa pada kutub magnet. Keadaan ini merupakan syarat utama untuk generator penguat medan sendiri dapat dijalankan.
Generator DC Berbeban:
Besar tegangan terminal dari generator seri berbeban adalah : Vt = Ea – IaRa
Bila generator DC dalam keadaan jalan tidak terbebani, maka Ia = 0
sehingga tegangan terminal menjadi Vt = Ea = E0
Pada generator DC shunt, besar tegangan terminal tanpa beban adalah : (Vt)NL = Ea – IaRa
(Vt)NL = Ea - Ra
Torsi (Kopel):
Jika jari-jari jangkar dari generator DC sebesar r mendapat gaya F maka kerja yang dilakukan oleh gaya F dalam satu putaran adalah :
W = F 2πr
Kerja yang dilakukan oleh gaya F dalam putaran per detik adalah : W = F 2πr n = F r 2π n
W = Ta 2π n = Ta ωm
W = Ta 2π N/60
dimana :
W = kerja yang dilakukan oleh kumparan jangkar F = Gaya (Newton)
r = jari-jari jangkar
N = Putaran jangkar (rpm = rotasi per menit) n = Putaran jangkar (rpd = rotasi per detik ) Ta = Torsi Jangkar (Nm) = F r
ωm = Kec. Putar mekanik ( rpd) = 2π n
Adapun besar kerja yang dilakukan oleh putaran jangkar per detik (ω) adalah sebanding dengan daya jangkar dapat ditulis :
W = Pa = Ea Ia
Dengan demikian dapat ditulis : EaIa = Ta 2π n Ta = Ta = 0.59 Dimana : Ta = torsi jangkar (Nm) n = putaran jangkar
Seperti yang telah diuraikan sebelumnya bahwa ggl induksi jangkar dapat ditulis : Ea = n I Ea a 2 1 n I Ea a a Z n P
Ta = 0.59 = 0.59
Ta = C Φ Ia
Dimana :
Ta = Torsi jangkar (Nm)
Φ = Fluks (weber)
Z = jumlah penghantar kumparan jangkar a = jumlah kumparan paralel
N = Putaran jangkar
Torsi Poros:
Akibat timbulnya torsi jangkar maka pada generator timbul daya output (Pout) dan dari Pout ini timbul torsi poros/sumbu (Shaft torque) dan disimbulkan dengan Tsh:
Pin = Tsh 2 π n = Tsh ωm
Tsh =
= 9.55 dimana :
Pin = daya input generator (watt)
Tsh = torsi poros/sumbu (Nm)
ωm = kecepatan putar mekanik (rpd) a Z I P a a I a ZP N Pin 2 60 N Pin
Rugi-rugi Total Rugi Total Rugi Listrik Rugi Besi Rugi Meka nik
Rugi tembaga jangkar (Rugi Variabel)
Jangkar
Sisi
Rugi kumparan medan (Rugi konstan)
shunt
Rugi Histerisis (Rugi Konstan)
Rugi Arus Pusar (Rugi Konstan)
Rugi Gesek (Sikat dan Sumbu)(Rugi Konstan)
Rugi Putar (angin) (Rugi Konstan) seri
Dari bagan diatas terlihat bahwa :
Rugi total = Rugi variabel + rugi konstan
Ptot = Rugi tembaga jangkar + rugi kumparan medan (Pc)
Untuk generator DC seri, besar rugi total adalah : Pt = IL2Ra + Pc
Untuk generator DC shunt, besar rugi total adalah : Pt = (IL+ Ish) 2Ra + Pc
Rugi- rugi Listrik:
Rugi listrik juga dikenal dengan rugi tembaga yang terdiri dari kumparan jangkar, kumparan medan seri dan kumparan medan shunt.
Rugi kumparan jangkar (Pa = Ia2Rsh ) besarnya sekitar 30 sampai 40%
Rugi kumparan medan shunt (Psh = Ish2Rsh) dan rugi kumparan medan seri
(Ps = Is2Rs) besarnya sekitar 20 sampai 30% dari rugi beban penuh.
Rugi Besi / rugi Magnetik:
Rugi magnetik terdiri dari rugi histerisis dan rugi arus pusar: Rugi histerisis (Ph) besarnya adalah :
Ph = ηhBmax1,6 f v (watt)
dimana ηh = koefisien steinmetz histerisis:
V = volume inti(m3),
f = frekuensi putar magnet = f= PN/120
Dari persamaan diatas, besaran koefisien steinmetz histerisis, kecepatan fluks dan volume inti adalah konstan sehingga Rugi histerisis adalah merupakan fungsi dari frekuensi yang didapat ditulis Ph = F(f). Jadi makin besar frekuensi
sinyal tegangan output makin besar rugi histerisisnya.
Rugi arus pusar (Pe)
besarnya adalah :
Ph = k Bmax2 f2 t2V (watt)
dimana k = konstanta arus pusar (yang tergantung pada ketebalan laminasi lempengan dan volume inti jangkar)
Karena nilai k dan B adalah konstan, maka besar kecilnya rugi arus pusar tergantung pada nilai frekuensi kuadrat atau ditulis Pe = F(f)2 .Jadi rugi besi
adalah sekitar 20 sampai 30% dari rugi total pada beban penuh
Effisiensi:
Pada umumnya efisiensi adalah perbandingan antara daya output dengan daya input.
Ada 3 (tiga) macam effisiensi yaitu :
] η ekonomi = x100%
P P
in out
η mekanis = η listrik =
Dimana :
Pin = Pout + Σ Ploss
Σ Ploss = (If2Rf + Ia2Ra + IL2Rs + Rugi gesek + Rugi inti) →generator
kompon If2Rf = Rugi kumparan medan shunt
Ia2Ra = Rugi kumparan jangkar
IL2Rs = Rugi kumparan medan seri
Rugi gesek = rugi sikat + rugi angin+ rugi shaft/sumbu Rugi sikat = Ia Vsi → Vsi = tegangan pada sikat
Rugi angin = rugi karena adanya celah antara bagian rotor dan stator (± 1%)
Rugi sumbu = rugi yang timbul pada benda berputar Rugi inti = rugi histerisis + rugi arus pusar
Pin = Tsh + ωm → daya total yang diterima mesin
Pout = VLIL → daya output generator.
% 100 x P P in a % 100 ) (RugiC Rugisikat x P P u out out
Presentasi Regulasi:
Untuk menghindari agar generator tidak terlalu berat menerima beban, maka diperlukan pengaturan tegangan atau persentasi regulasi. Adapun besar persentasi regulasi tegangan maksimum yang diijinkan adalah 40% dan dapat ditulis :
Presentasi regulasi naik =
Presentasi regulasi turun =
Untuk generator DC shunt, besar tegangan terminal tanpa beban adalah :
(Vt)nL =
sedangkan untuk generator seri :
(Vt)nL = E0 =
Adapun besar arus jangkar Ia adalah :
Ia =
MOTOR DC
Motor listrik merupakan alat yang berfungsi untuk mengubah daya listrik menjadi daya mekanik. Prinsip Kerja :Jika sepotong kawat dialiri arus listrik terletak di antara dua kutub magnet utara dan selatan, maka pada kawat
% 100 ) ( ) ( ) ( x V V V fL t fL t nL t % 100 ) ( ) ( ) ( x V V V nL t fL t nL t sh a R R E 1 0 60 a Z n P fL L fL t nL t nL t I x V V V V ) ( ) ( ) ( ) (
tersebut terkena suatu gaya Lorentz. Arah dari gerakan kawat sesuai dengan aturan tangan kiri.
Untuk mengetahui arah putaran motor searah atau perlawanan dengan arah jarum jam (lihat gambar) pada gambar a arus listrik yang mengalir melalui sisi kumparan sebelah atas (kutub utara) dengan arah meninggalkan (keluar) sedangkan arus listrik pada sisi kumparan sebelah bawah (kutub selatan) menuju kedalam (masuk) maka kumparan akan berputar berlawanan jarum jam (perhatikan arah medan magnet) sekitar kawat seperti pada gambar b dan c:
Jika ujung-ujung kumparan dihubungkan dengan sumber listrik DC dengan polaritasnya berlawanan dengan polaritas batery (gambar a), maka kumparan akan berputar searah dengan jarum jam.
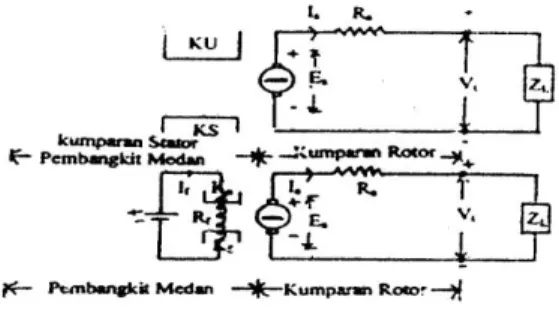
Rangkaian listrik motor DC tanpa penguatan medan:
Ia = arus jangkar
Ra = tahanan jangkar
KU = kutub utara magnet
KS = kutub selatan magnet
Rangkaian listrik motor DC Penguat tanpa medan terpisah:
Rangkaian listrik motor DC Penguat Kumparan Medan Shunt:
Dari gambar berlaku persamaan : Vt = IaRa + Ea + Vs
x Ia
VtIa = (Ia)2Ra + EaIa + IaVs = daya listrik yang dibutuhkan untuk memutar jangkar
VtIL = Pin = daya input yang dibutuhkan dari sumber listrik
EaIa = Pa (daya armatur)
(Ia)2Ra = Rugi daya listrik pada jangkar
Vsh = IfRf =Vt
IL = Ia + If = arus jala-jala
GGL induksi jangkar Ea timbul akibat kumparan rotor berputar yang terletak di
antara kutub utara dan kutub selatan magnet motor. Pada saat awal rotor berputar, Ea = 0 artinya kumparan rotor akan menarik arus yang besar dari
sumber listrik, Setelah motor berputar pada kecepatan yang sebenarnya Ea =
max maka motor akan menarik arus listrik sumber paling minimum (arus nominal = sepersepuluh dari arus start)
Torsi jangkar motor DC adalah :
Atau :
T = K Φ Ia (Nm)
Dimana :
Φ = fluks dalam weber
Jika panjang kumparan rotor L dialiri arus listrik sebesar I dan terletak diantara kutub magnet utara dan selatan dengan kerapatan fluks sebesar B, maka kumparan rotor tersebut mendapat gaya F sebesar :
F = B I L
JENIS-JENIS MOTOR DC:
Motor DC Shunt
Ea = Gaya gerak listrik jangkar
= Vt – IaRa - Vs = Vt - (IL – Ish)Ra – Vs (Pcu)tot = Ia2Ra + Ish2Rsh Vt = tegangan terminal IL = Arus jala-jala Pin = Vt IL a I z a P T 159 . 0
Ia = Arus jangkar
Ish = Arus shunt
IL = Ia + Ish
Rsh = Tahanan kumparan shunt
Vsh = Tegangan kumparan shunt = Ish Rsh
Ra = Tahanan kumparan jangkar
Va = Tegangan jatuh pada kumparan
MOTOR DC SERI:
Ia = IL
Pin = Vt IL
Rs = tahanan kumparan seri = ILRs
Pa = EaIa
Ea = Vt – IaRs – IaRa – Vs
(Pcu)tot = Ia2Ra + IL2Rs
Motor DC Kompon Pendek:
Pin = VLIL
IL = Ia + Ish
Pa = EaIa
Ea = Vt – ILRs – IaRa – Vs
(IL)2Rs = rugi daya pada kumparan seri
IaRa = tegangan jatuh pada tahanan jangkar
(Ia)2 Ra = rugi daya jangkar
(Pcu)tot = Ia2Ra + IL2Rs + Ish2Rsh
IshRsh = Vsh = Vt – Vs
Ish2Rsh = Rugi daya pada kumparan shunt
Motor DC Kompon Panjang:
Pin = VtIL IL = Ia + Ish Pa = EaIa Ea = Vt – IaRs – IaRa – Vs Vsh = Vt Vsh = IshRsh
(Ia)2Ra = rugi daya pada tahanan jangkar
(Ia)2Rs = rugi daya pada kumparan seri
(Ish)2Rsh = rugi daya pada kumparan shunt
DAYA JANGKAR MAKSIMUM:
Jika daya jangkar motor DC maksimum, maka besar daya output atau kopel sumbu akan maksimum juga. Daya jangkar akan maksimum, bila gaya gerak listrik jangkar dioperasikan pada setengah tegangan terminalnya. Untuk Motor DC shunt maka :
VtIa = EaIa + (Ia)2Ra
Pa = VtIa – (Ia)2Ra
Pa maksimum jika dPa/dIa = 0 dPa/dIa= Vt – 2IaRa = 0
IaRa = Vt/2
Oleh karena Vt= Ea+ IaRa dan IaRa = Vt/2 maka :
Vt = Ea + Vt/2
Ea = Vt /2
Bahwa daya jangkar akan maksimum jika Ea dioperasikan pada Vt/2 yang
diperoleh dengan cara mengatur kecepatan putar motor (N) dari persamaan besar ggl jangkar
PENGATURAN KECEPATAN MOTOR DC:
Besarnya GGL induksi pada kumparan jangkar sebagai akibat berputarnya rotor yang terletak diantara kutub magnet adalah :
Ea =
Dimana :
Φ = fluks magnet perkutub N = Putaran rotor (rpm) Atau dapat dituliskan :
Ea = C Φ N Dimana: Vt = Ea + IaRa C R I V N t a a 60 a N Z P Ea 8 10 60 x a N Z P 60 a Z P C Ea C N 1
Dapat dikatakan bahwa kecepatan putar motor dapat diperoleh dengan mengubah-ubah fluks magnet, pengaturan arus armatur atau perubahan tegangan sumber (Vt )
Pengaturan Kecepatan Putar Motor DC: Dengan Pengaturan Fluks Magnet:
Dengan Pengaturan Fluks Magnet, Kecepatan putar Motor DC akan minimum bila arus If minimum yang terjadi pada posisi rheostat maksimum. Pengaturan kecepatan motor DC untuk model ini pengerjaannya mudah, murah dan panas yang terjadi juga rendah..
Pengaturan Kecepatan Putar Motor DC: Dengan Pengaturan Arus Jangkar
Pengaturan kecepatan putar motor dengan pengaturan arus jangkar jarang dipakai karena rugi panas yang terjadi cukup besar.
Pengaturan kecepatan putar motor dengan pengaturan arus jangkar jarang dipakai karena rugi panas yang terjadi cukup besar.
Pengaturan Kecepatan Putar Motor DC:
Dengan Pengaturan Tegangan Terminal:
Tegangan terminal Vt didapat dari tegangan generator DC yang diputar oleh
motor induksi M. Perubahan Vt diperoleh dengan cara mengatur hambatan RG
yang mempengaruhi medan penguat Rf
Kecepatan Putar Motor Seri:
Bila kecepatan putar awal dari motor seri adalah N1 maka menurut
persamaan adalah :
Jika kecepatan putar motor tersebut berubah menjadi N2 maka :
Perbandingan dari kedua kecepatan putar tersebut adalah :
Kecepatan Putar Motor Shunt:
Untuk motor shunt bila kecepatan putar berubah dari N1 ke N2 maka besar
perubahan fluks tetap besarnya atau Φ1 = Φ2 .Karena arus yang mengalir melalui
kumparan medan shunt, besarnya tetap (tidak terpengaruh beban):
1 1 1 1 a E C N
1 1 1 1 s a a a t I R I R V C
2 2 2 1 a E C N
2 2 2 1 s a a a t I R I R V C
2 1 1 2 1 2 a a a a I I E E N N Maka :
Karakteristik motor dc:
Karakteristik Kopel Terhadap Arus Jangkar:
Besarnya Kopel Jangkar (Ta) motor DC adalah :
Dimana untuk ggl jangkar adalah :
Bahwa kopel jangkar sebagai fungsi dari fluks dan arus jangkar dapat ditulis: Ta = f (Φ Ia)
Jika arus jangkar bertambah besar, maka akan diikuti oleh kenaikan kopel jangkar atau sebaliknya. Pada motor DC seri, kenaikan arus jangkar akan memperbesar fluks. Sehingga persamaannya dapat ditulis :
Ta = f(Ia)2
Karakteristik motor DC seri dapat digambarkan sebagai berikut :
1 2 1 2 a a E E N N N I E N I E I E n P T a a a a N a a a a 9,55 2 60 2 2 60 8 10 60 x a N Z P Ea a a a I a Z P a Z N P I N T 2 60 2 60Karakteristik Kecepatan Putar Terhadap Arus Jangkar:
Hubungan antara kecepatan putar terhadap arus jangkar motor DC adalah :
Dari persamaan diatas, nilai kecepatan putar akan berubah jika harga atau besar arus jangkar berubah, dimana hubungannya dapat digambarakan sebagai berikut :
Karakteristik Mekanik:
Karateristik mekanik diperoleh dari hubungan antara kecepatan putar dengan kopel elektromagnetik atau kopel jangkar:
Perubahan nilai kopel jangkar akan selalu diikuti oleh perubahan kecepatan putar dan dapat ditunjukkan pada gambar
MOTOR TANPA BEBAN:
Motor Shunt
Motor tanpa beban artinya bahwa arus jala-jala IL= (IL)0 karena Ish= Vt/Rsh
maka arus jangkar tanpa beban adalah : (Ia)0= (IL)0 - Ish c R I V N t a a N I E T a a a9,55
Besarnya ggl jangkar tanpa beban adalah : (Ea)0 = E0 = Vt – (Ia)0 Ra
Pada motor shunt tanpa beban, besar daya output Po = 0 atau relatif kecil
karena Ia = (Ia)0
Besar daya input Pin sama dengan jumlah seluruh rugi-rugi dapat ditulis:
Pin = Σloss
dimana :
Pin = Vt (IL)0
Σloss = (Ia)0Ra + (Ish)2Rsh + Rugi inti + Rugi gesek
Rugi gesek = Pa – Po – PC
Motor Seri
Untuk motor seri tanpa beban besar IL = 0, karena Ia = IL maka arus
jangkar juga sama dengan nol
GGL jangkar motor seri tanpa beban adalah : Eo = Vt
Daya output dan daya input untuk motor seri tanpa beban adalah Nol
EFFESIENSI :
Efisiensi motor ada 3 macam yaitu : % 100 x P P in m Ekonomi % 100 x P P a m mekanis % 100 x Rugi P P sikat cu a a listrik
Dimana :
Pin = Vt IL
Pa = Ea Ia
Ts = Torsi sumbu (Nm)
ωm = Kecepatan putar rotor
0 5 , 735 ) ( 5 , 735 BHP P T P s m m
BIODATA
Nama : Putu Rusdi Ariawan
TTL : Denpasar. 19 April 1990
Agama : Hindu
Mahasiswa Teknik Elektro Unv. Udayana Email : [email protected]