Informasi Dokumen
- Penulis:
- Delta Agus Setya Abadi
- Sekolah: Universitas Diponegoro
- Mata Pelajaran: Diploma III Teknik Elektro
- Topik: Sensor Ultrasonik Sebagai Alat Navigasi Robot Pada Robot Pemadam Api Berbasis Mikrokontroler ATMega 8535
- Tipe: tugas akhir
- Tahun: 2008
- Kota: Semarang
Ringkasan Dokumen
I. PENDAHULUAN
Bab ini menjelaskan latar belakang, tujuan, pembatasan masalah, metode penulisan, dan sistematika penulisan. Latar belakang menyebutkan pentingnya perkembangan teknologi dan peran sensor dalam merancang robot pemadam api. Tujuan dari penelitian ini adalah untuk memenuhi syarat akademis dan mengaplikasikan pengetahuan yang diperoleh selama pendidikan. Pembatasan masalah ditetapkan pada penggunaan mikrokontroler ATMega 8535 dan sensor ultrasonik sebagai alat navigasi. Metode penulisan mencakup studi literatur, observasi, eksperimen, dan analisis data. Sistematika penulisan memberikan gambaran umum tentang isi laporan.
II. LANDASAN TEORI
Bab ini membahas teori-teori dasar yang menjadi landasan dalam pembuatan robot pemadam api. Dimulai dengan penjelasan tentang robot avoider yang dapat menghindari halangan, diikuti dengan penjelasan tentang sensor ultrasonik, termasuk jenis-jenisnya seperti sensor jarak ultrasonik Ping dan SRF 04. Selain itu, dibahas juga prinsip dasar navigasi robot dan fungsi mikrokontroler ATMega 8535, termasuk susunan kaki, blok diagram, dan organisasi memori, yang penting untuk pengembangan perangkat lunak dan perangkat keras robot.
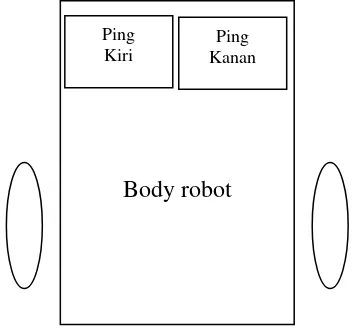
2.1 Robot Avoider
Robot avoider adalah robot yang dirancang untuk menghindari halangan dengan menggunakan beberapa sensor. Sensor ultrasonik digunakan untuk mendeteksi penghalang di depan, kanan, dan kiri, yang memungkinkan robot untuk beroperasi dengan lebih baik. Konsep ini menjadi dasar untuk mengembangkan robot pemadam api yang lebih kompleks.
2.2 Sensor Ultrasonik
Sensor ultrasonik bekerja dengan memancarkan gelombang suara untuk mendeteksi objek. Terdiri dari unit pemancar dan penerima, sensor ini dapat mengukur jarak dengan akurasi yang baik. Sensor ini sangat penting dalam navigasi robot untuk menghindari tabrakan.
2.3 Mikrokontroler ATMega 8535
Mikrokontroler ATMega 8535 adalah pusat pengendalian robot. Memiliki berbagai fitur seperti memori yang dapat diprogram, input/output yang fleksibel, dan kemampuan untuk menjalankan program yang kompleks, mikrokontroler ini sangat sesuai untuk aplikasi robotik.
III. PRINSIP KERJA RANGKAIAN
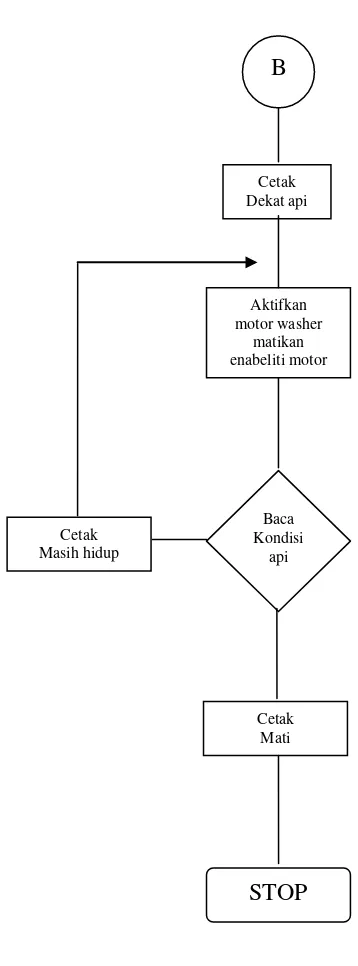
Bab ini menjelaskan cara kerja setiap komponen dalam rangkaian robot pemadam api. Sensor ultrasonik berfungsi sebagai navigasi, mendeteksi halangan dan mengirimkan data ke mikrokontroler. Mikrokontroler kemudian memproses data ini untuk mengontrol motor dan perangkat lainnya. Prinsip kerja rangkaian secara keseluruhan dijelaskan, termasuk interaksi antara komponen dan logika pemrograman yang digunakan.
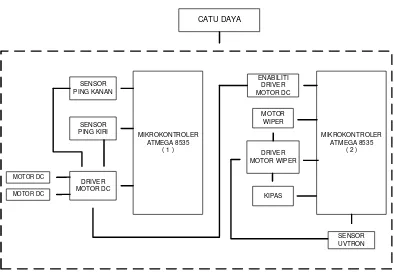
3.1 Cara Kerja Tiap Blok
Setiap blok dalam rangkaian memiliki fungsi tertentu. Sensor ultrasonik mendeteksi halangan, mikrokontroler mengolah data, dan motor DC menggerakkan robot. Penjelasan rinci tentang interaksi antar blok dan logika yang diterapkan dalam program disertakan.
IV. PEMBUATAN BENDA KERJA
Bab ini menjelaskan proses pembuatan robot pemadam api, mulai dari perencanaan hingga realisasi. Pembuatan dibagi menjadi beberapa bagian, termasuk elektronik, mekanik, dan pemrograman. Alat dan bahan yang digunakan juga dicantumkan, memberikan gambaran yang jelas tentang sumber daya yang diperlukan untuk menyelesaikan proyek.
4.1 Alat dan bahan yang dibutuhkan
Daftar alat dan bahan yang diperlukan untuk pembuatan robot pemadam api disediakan. Ini mencakup semua peralatan elektronik dan mekanik yang diperlukan untuk merakit robot, serta spesifikasi masing-masing alat dan bahan.
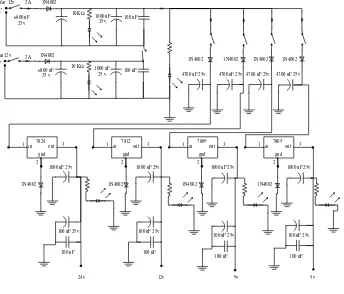
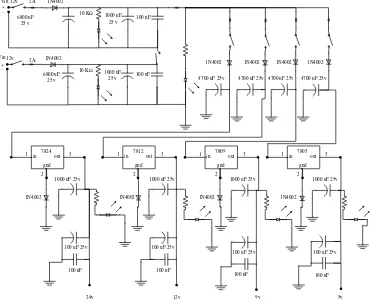
4.2 Pembuatan bagian elektronika
Proses pembuatan bagian elektronik meliputi perencanaan rangkaian, pembuatan PCB, dan pemasangan komponen. Langkah-langkah ini penting untuk memastikan bahwa semua komponen berfungsi dengan baik dalam sistem.
V. PENGUJIAN DAN PENGUKURAN
Bab ini membahas pengujian rangkaian dan alat untuk memastikan bahwa semua sistem berjalan sesuai rencana. Langkah-langkah pengujian, peralatan yang digunakan, dan analisis hasil pengujian dijelaskan secara rinci. Analisis ini penting untuk mengevaluasi kinerja robot dan efektivitas sistem yang telah dibangun.
5.1 Tujuan
Tujuan dari pengujian adalah untuk memastikan bahwa robot berfungsi dengan baik dan dapat mendeteksi halangan serta nyala api secara efektif. Pengujian ini juga untuk mengevaluasi kinerja keseluruhan dari sistem.
5.2 Peralatan yang digunakan
Daftar peralatan yang digunakan dalam proses pengujian disediakan, termasuk alat ukur dan perangkat lunak yang diperlukan untuk analisis data. Ini memberikan gambaran tentang sumber daya yang digunakan dalam evaluasi.
VI. PENUTUP
Bab ini menyimpulkan hasil dari penelitian dan pengembangan robot pemadam api. Kesimpulan mencakup pencapaian tujuan yang telah ditetapkan dan saran untuk pengembangan lebih lanjut. Ini memberikan refleksi atas proses yang telah dilalui dan hasil yang dicapai.
6.1 Kesimpulan
Kesimpulan dari penelitian ini menunjukkan bahwa robot pemadam api dapat beroperasi dengan baik menggunakan sensor ultrasonik dan mikrokontroler ATMega 8535. Robot ini mampu mendeteksi halangan dan nyala api secara efektif.
6.2 Saran
Saran diberikan untuk pengembangan lebih lanjut dari robot pemadam api, termasuk peningkatan algoritma navigasi dan penambahan sensor untuk meningkatkan kinerja robot di berbagai kondisi.
Referensi Dokumen
- Robot Pemadam Api (Fire Figthing Robot) ( Delta Agus S A )
- trigger pulse ultrasonic range finder ( delta_master )