ALAT BANTU NAVIGASI TUNANETRA OTOMATIS MENGGUNAKAN SENSOR ULTRASONIK BERBASIS ARDUINO UNO
1
Nurhamidah, 2Abdul Jabbar Lubis, 3M. Taufik Batubara Program Studi Teknik Informatika Sekolah Tinggi Teknik Harapan Medan
Jl. HM Jhoni No. 70 Medan , Indonesia 1
[email protected] Abstrak
Pada penelitian ini penulis mengembangkan alat bantu navigasi tunanetra otomatis untuk penyandang tunanetra saat berjalan dan untuk melakukan aktifitas sehari – hari. Tongkat ini berfungsi untuk memeberi tahu dan juga mendeteksi adanya objek atau halangan yang berada di depan, kiri dan kanan penyandang tunanetra saat mereka berjalan. Alat ini menggunakan Arduino Uno sebagai mikrokontroller pengendali dan memanfaatkan sensor ultrasonik sebagai alat bantu pengendali dan memberikan sinyal kepada penyandang tunanetra tersebut bahwa ada halangan atau suatu objek di depan, kiri dan kanan mereka secara otomatis. Pengguna dapat merasakan adanya halangan melalui umpan balik berupa suara atau bunyi dari buzzer yang dirasakan dan dari Motor Servo melalui umpan balik pergerakan oleh tongkat penyandang tunanetra tersebut. Dan dengan menngunakan powerbank untuk memberi daya pada alat ini dalam waktu yang cukup lama. Dan pada alat bantu navigasi tunanetra otomatis ini jarak yang diatur adala 0 – 50 cm untuk mendeteksi adanya objek atau halangan saat penyandang tunanetra berjalan.
Kata Kunci:Alat Bantu Navigasi Otomatis, Arduino Uno, Sensor Ultrasonik, Buzzer, Motor Servo. Abstract
In the study the authors develop a navigation tool for automatic blind visually impaired persons when walking and everyday activities to do. The rod serves to inform and also detected the object or obstruction that was in front of the left and right of persons who are blind when they run. This tool uses the arduino uno as the governing mikrokontroller and untilizing ultrasonic sensors as a governing tool and gave a signal to the disabled, the visually impaired that there is an obstacle or an object in front of their left and right. Uses can feel the existence of impediments through feedback in the from of sound or the sound of the buzzer and the perceived of the motor servo a feedback movement by the disabled, the blind. And by using powerbank to give power on this tool in quite a long time. And the blind navigation at this distance set is 0 – 50 cm to detect any object or obstacle when the blind walk.
Keywords:The Blind Automatic Navigation Tools, Arduino Uno, Sensor Ultrasonik, Buzzer, Motor Servo.
1. PENDAHULUAN
Perkembangan teknologi yang sangat pesat membuat bidang robotika juga semakin berkembang maju hingga pada akhirnya mengantarkan kita pada era teknologi robotika. Robot dapat menggantikan tugas manusia, melakukan pekerjaan berat, pekerjaan yang memerlukan ketelitian tinggi hingga yang rumit sekalipun. Tentunya hal ini dimaksudkan untuk lebih mempermudah manusia untuk melakukan pekerjaannya sehari-hari. Ditambah dengan kebutuhan sistem yang semakin canggih dan makin banyak pula alat-alat komunikasi maupun alat bantu manusia yang harus kita kembangkan menjadi lebih efektif. Terutama di kota besar
aktifitas individu sangatlah padat dengan berbagai macam aktivitasnya. Maka dari itu saya akan merancang suatu alat bantu bagi penyandang tunanetra otomatis.
Hal ini dapat di permudah dengan penggabungan beberapa teknologi yang telah berkembang saat ini di dunia robotika dengan dilakukannya perancangan sebuah alat bantu navigasi tunanetra otomatis yang dapat digunakan sebagai alternatif baru bagi penyandang tunanetra agar lebih efektif. Alat ini dirancang dengan menggunakan sensor ultrasonik sebagai alat bantu pengendali dan memberikan sinyal kepada penyandang tunanetra tersebut bahwa ada
halangan atau suatu objek di depan mereka. Ketika ada suatu halangan di depan mereka maka alat ini akan berbunyi dengan otomatis memberitahu bahwasannya ada suatu halangan atau suatu objek di depan mereka. Alat ini telah dirancang dengan menarik dan mudah dipahami bagi pengguna penyandang tunanetra tersebut.
Alat navigasi tunanetra otomatis bekerja memakai arduino uno sebagai mikrokontroller pengendali dan memanfaatkan Sensor Ultrasonik sebagai alat bantu pengendali dan memberikan sinyal kepada penyandang tunanetra tersebut bahwa ada halangan atau suatu objek di depan mereka secara otomatis. Pengguna dapat merasakan adanya halangan melalui umpan balik berupa suara atau bunyi dari buzzer yang dirasakan dan dari Motor Servo melalui umpan balik pergerakan oleh tongkat penyandang tunanetra tersebut. Dan dengan menngunakan powerbank untuk memberi daya pada alat ini dalam waktu yang cukup lama.
Berdasarkan hasil latar belakang di atas, terdpat penelitian sebelumnya yang pernah dilakukan oleh : Triarnowo Yudha, Susanta Erwin, Nugraha Ramadhan Mahasiswa dari Universitas Telkom (2014). Dengan judul Pengembangan Sarung Tangan Sonar Sebagai Alternatif Alat Bantu Navigasi Bagi Tunanetra Menggunakan Arduino. Secara garis besar dengan menggunakan alat ini para penyandang tunanetra dapat lebih mudah mengetahui suatu halangan atau objek di depan mereka secara otomatis dengan menggunakan Sarung tangan sonar sebagai alternatif otomatis dengan menngunakan sensor ultrasonik dan mikrokontroller arduino sebagai alat pendeteksi berbagai halangan yang diam atau objek yang bergerak disekitar penyandang tunanetra secara instan. Alat ini mempunyai jarak efektif antara 5cm – 1m. Pengguna dapat merasakan adanya halangan melalui umpan balik berupa getaran dari motor vibrator yang dirasakan oleh tangan penyandang tunanetra yang intensitasnya berbanding terbalik dengan jarak atau objekpada tiga arah di sekeliling penyandang tunanetra. Penelitian selanjutnya dilakukan oleh Ahmad Burhannudin dari Universitas Negeri Jogyakarta (2015). Dengan judul Pengembangan Alat Bantu Pembelajaran Tongkat Dengan Sistem Kerja line follower Berbasis Mikrokontroller Atmega 32 Pada Anak Berkebutuhan Khusus “Tunanetra” Untuk Olahraga Atletik Nomor Jalan Cepat. Secara garis besar dengan menggunakan alat ini
menggunakan pendekatan penelitian dan pengembangan (research and development).Penelitian ini berorientasi pada produk yang dikembangkan. Pada pengembangan ini produk yang dikembangkan adalah robot dengan sistem kerja line followeryang berbasis ATmega32 untuk membantu ABK tunanetra berolahraga atletik nomor jalan cepat. Model pengembangan ini nantinya menggunakan langkah-langkah yang harus diikuti untuk menghasilkan suatu produk yang diharapkan. Hasil dari produk pengembangan ini nantinya berupa tongkat yang telah di desain dengan sistem kerja line follower untuk anak berkebuthan khusus tunanetra dalam melakukan olahraga atletik nomor jalan cepat.
2. METODOLOGI PENELITIAN
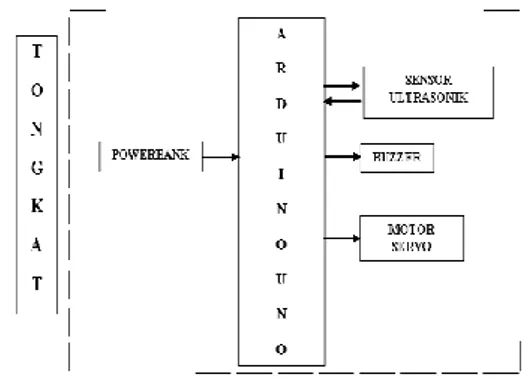
Metode ini menggunakan metode eksperimen (uji coba). Eksperimen dilakukan pada perancangan blok – blok rangkaian untuk menghasilkan alat sebagaimnana tujuan awal. Dengan melakukan eksperimen terhadap perancangan dan pembuatan alat ini, diharapkan akan didapatkan rangkaian dan program sesuai dengan fungsi serta tujuan dari pembuatan alat ini. Secara umum blok diagram dapat dilihat pada Gambar :
Gambar 1Diagram Blok Sistem Penjelasan dari tiap blok gambar tersebut adalah sebagai berikut :
a. Blok Arduino Uno adalah sebuah board mirokontroller yang berbasis ATmega328. Arduino memiliki 14 pin input/output yang mana 6 pin dapat digunakan sebagai output PWM, 6 analog input, crystal osilator 16 MHz, koneksi USB, jack power, kepala ICSP, dan tombol reset.[1]
b. Sensor Ultrasonik adalah sensor yang bekerja berdasarkan prisnip pantulan
gelomabang suara, sensor menghasilkan gelombang suara yang kemudian menangkapnya kembali dengan perbedaan waktu sebagai dasar penginderaannya.[3] c. Buzzer adalah sebuah komponen
elektronika yang berfungsi untuk mengubah getaran listrik menjadi getaran suara.[4]
d. Motor Servo adalah sebuah perangkat atau aktuator putar (motor) yang dirancang dengan sistem kontrol umpan balik loop tertutup (servo), sehingga dapat di set- up atau di atur untuk menentukan dan memastikan posisi sudut dari poros output motor.[2]
e. Powerbank adalah suatu alat yang berfungsi sebagai pengisi daya dari sumber daya listrik atau disebut juga sebagai penyimpanan daya atau dapat diumpamakan seperti baterai cadangan (subbatery).
f. Tongkat tunanetra adalah suatu tongkat yang lurus dan panjang yang merupakan alat bantu mobilitas yang paling banyak digunakan untuk tunanetra.
2.1 Diagram Alir Sistem
Diagram alir sistem adalah gambaran grafis yang memperlihatkan aliran data dari sumbernya dalam objek kemudain melewati objek kemudian melewati suatu proses yang mentransformasikan ke tujuan lain.
Dengan demikian data flow diagram adalah alat yang digunakan untuk menggambarkan aliran data melalui sistem dan kerja atau pengolahan yang dilakukan oleh sistem tersebut, yang ada pada objek lain. Berikut ini akan di jelaskan diagram alur sistem yang terdpat pada rangkian alat ini yaitu sebagai berikut :
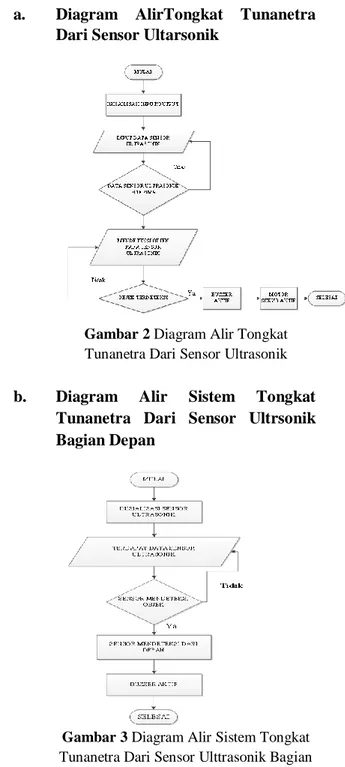
a. Diagram AlirTongkat Tunanetra Dari Sensor Ultarsonik
Gambar 2 Diagram Alir Tongkat Tunanetra Dari Sensor Ultrasonik b. Diagram Alir Sistem Tongkat
Tunanetra Dari Sensor Ultrsonik Bagian Depan
Gambar 3 Diagram Alir Sistem Tongkat Tunanetra Dari Sensor Ulttrasonik Bagian
c. Diagram Alir Sistem Tongkat Tunanetra Dari Bagian Kanan
Gambar 4Diagram Alir Sistem Tongkat Tunanetra Dari Bagian Kanan d. Diagram Alir Sistem Tongkat
Tunanetra Dari Bagian Kiri
Gambar 5 Diagram Alir Sistem Tongkat Tunanetra Dari Bagian Kiri 2.2 Perancangan Perangkat Keras
Perangkat keras adalah komponen utama dan terpenting dalam pembuatan sistem ini. Adapun perancangan perangkat keras dalam penelitian ini anatara lain :
a. Instalsi Rangkaian Arduino Uno Sebagai Pengendali Utama
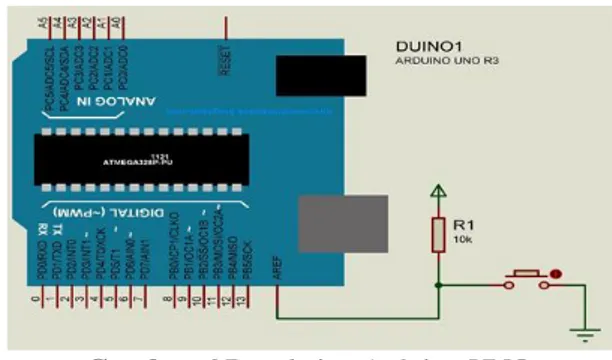
Pada penelitian ini penulis menggunakan Arduino uno sebagai pegendali, Arduino uno adalah sebuah board mikrokontroller yang berbasis Atmega328 dan sebuah tombol reset. Arduino uno berfungsi sebagai pengola data input dan data ouput semua komponen lainnya, sedangkan rangkaian tombol reset berfungsi sebagai pengulang kembali proses arduino apabila
tidak berjalan baik ketika di jalankan. Rangkaian Arduino uno dapat di lihat pada gambar di bawah ini.
Gambar 6 Rangkaian Arduino UNO Arduino uno ini memiliki 14 pin input/output yang mana 6 pin dapat di gunakan sebagai output PWM (Pulse Width Modulation), 6 analog input, crystal osilator 16 MHz, koneksi USB, jack power, kepala ICSP dan tombol reset. Pada perancangan proses ini yang terjadi padaarduino uno adalah proses pembacaan buzzer dan motor servo, proses mengaktifkan dan menonaktifkan saklar, dan proses komunikasi dengan sensor ultrasonik.
b. Instalsi Rangkaian Sensor
Ultrasonik
Pada perancangan Alat Bantu Navigasi Tunanetra Otomatis ini penulis menggunakan Sensor Ultrasonik sebagai pendeteksi adanya objek atau halangan yang berada di depan sensor. Pada alat ini saya menggunakan 3 sensor Ultrasonik yang berada di depan, kiri dan kanan. Sensor ultrasonik ini dikendalikan oleh arduino uno dan sensor ultrasonik dalam alat ini berfungsi sebagai pendeteksi adanya halangan atau objek. Berikut adalah rangkaian Sensor Ultrasonik :
c. Instalsi Rangkaian Motor Servo
Pada perancanganAlat Bantu Navigasi Tunanetra Otomatis ini penulis menggunakan Motor Servo sebagai pemberi tahu adanya objek atau halangan melalui sentuhan. Apabila pengguna menggunakan tangan kanannya untuk memegang tongkat. Maka motor servo akan memberi sentuhan pada jari manis untuk memberi peringatan akan adanya objek atau halangan dari sisi kanan dan apabila objek atau halangan berasal dari sisi kiri maka motor servo akan memberi sinyal berupa sentuhan pada jari telunjuk. Berikut adalah gambar rangkaian dari Motor Servo adalah sebagai berikut :
Gambar 8 Rangkaian Motor Servo d. Instalsi Rangkaian Buzzer
Pada perancanganAlat Bantu Navigasi Tunanetra Otomatis ini penulis menggunakan Buzzer sebagai pemberi sinyal bunyi ketika ada suatu objek atau halangan. buzzer tersebut berbunyi ketika sinyal dari sensor ultrasonik menerima suatu objek atau halangan maka secara otomatis buzzer tersebut berbunyi dengan arah dari depan, kanan dan kiri dengan nada yang berbeda – beda.
Gambar 9Rangkaian Keseluruhan Buzzer e. Instalsi Rangkaian Powerbank
Pada perancangan Alat Bantu Navigasi Tunanetra Otomatis ini penulis menggunakan powerbank sebagai sumber daya listrik atau
disebut juga sebagai penyimapanan daya atau diumpamakan seperti baterai cadangan (subbatery). Berikut ini adalah gambar rangkaian Powerbank :
Gambar 10 Rangkaian Powerbank
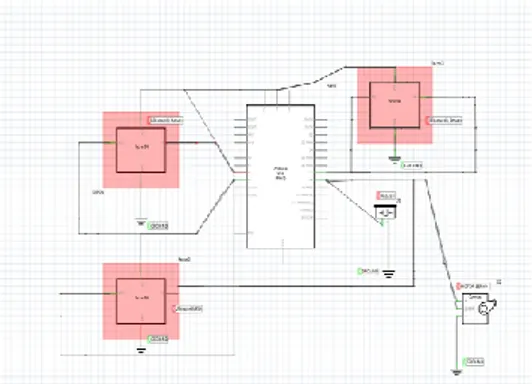
f. Perancangan Keseluruhan
Perangkat Keras (Hardware)
Setelah dilakukan perancangan terhadap masing-masing perangkat keras, maka tahap selanjutnya adalah tahap perancangan untuk keseluruhan perangkat keras (hardware). Perangkat keras seperti arduino uno, Sensor Ultrasonik, Motor Servo, Buzzer dan Powerbank. Yang dihubungkan menjadi satu kesatuan dengan arduino uno melalui port-port yang telah ditentukan. Pada tahapan ini, keseluruhan unit perangkat keras atau rangkaian alat diwujudkan menjadi sebuah prototype sehingga dapat disimulasikan secara langsung. Berikut gambar Rangkaian keseluruhan :
Gambar 11Rangkaian Keseluruhan
Adapun hasil dari pengujian alat adalah sebagai berikut :
3.1 Cara Kerja Alat
Untuk menggunakan tongkat otomatis ini terlebih dahulu kita harus memprogram data pada komponen – komponen pada tongkat tunanetra otomatis ini. Pada rangkaian alat ini kita harus memprogram terlebih dahulu Senosr Ultrasonik untuk mengetahui jarak objek atau halangan yang akan terdeteksi. Dan buzzer sebagai sumber suara agar penyandang tunanetra mengetahui adanya objek atau halangan di depan, kiri dan kanan mereka secara otomatis melalui sinyal yang diberikan sensor ultrasonik tersebut.
Dan alat ini juga menggunakan motor servo sebagai pemberi sinyal kepada penyandang tunanetra dengan cara sentuhan. Motor servo ini digunakan untuk mengetahui jika ada objek atau halangan dari kiri dan kanan penyandang tunanetra, dan buzzer secara bersamaan akan memberi tahu kepada penyandang tunanetra tersebut secara otomatis.
3.2 Pengujian Alat
Pengujian alat dilakukan untuk menguji coba dan mengetahui apakah alat bekerja sesuai dengan perencanaan sebelumnya.
a. Pengujian Rangkaian Arduino Dengan Sensor Ultrasonik
Pengujian ini di lakukan untuk mengetahui apakah arduino sudah berjalan dengan baik atau belum sesuai dengan yang di rencanakan. Untuk mengetahui apakah arduino ini berjalan dengan baik maka harus menjalankan program Arduino IDE terlebih dahulu dengan menggunakan bahasa visual bahasa C. Berikut Listing Program Untuk Menampilkan jarak pada Arduino :
Gambar 12Listing Program Untuk Menampilkan Jarak Pada Arduino Uno
b. Pengujian Rangkaian Arduino Uno Dengan Motor Servo
Pengujian rangkaian dengan motor servo ini dilakukan untuk mengetahui adanya objek atau halangan terdeteksi dengan cara memberikan penanda sentuhan jari tangan pada bagian kanan dan kiri sensor ultrasonik yang diberikan oleh motor servo tersebut. Pengujian rangkaian motor servo ini dilakukan dengan memasang komponen – komponen tersebut pada arduino yang berfungsi sebagai otak dari alat ini berfungsi. Berikut adalah Listing Program untuk mengaktifkan Motor Servo:
Gambar 13Listing Program Untuk Mengaktifkan Motor Servo
c. Pengujian Rangkaian Arduino Uno Dengan Buzzer
Pengujian rangkaian dengan buzzer ini dilakukan untuk mengetahui adanya objek atau halangan terdeteksi dengan cara memberikan penanda berupa bunyi. Pengujian rangkaian buzzer ini dilakukan dengan memasang komponen – komponen tersebut pada arduino yang berfungsi sebagai otak dari alat ini berfungsi.
Sama halnya dengan pengujian arduino uno dengan Sensor Ulltrasonik , pada pengujian yang dilakukan pada buzzer yaitu dengan menggunakan program arduino IDE. Dengan prinsip kerja buzzer akan berfungsi ketika objek atau halangan terdeteksi dari bagian depan, kiri dan kanan.
Berikut Listing Program Untuk Mengaktifkan Buzzer :
Gambar 14Listing Program Untuk Mengaktifkan Buzzer
d. Pengujian Alat Pada Tongkat Tunanetra Otomatis
Dalam prosedur pengujian alat peneliti melakukan pengujian pada tongkat tunanetra otomatis, guna mengetahui hasil dari manfaat menggunakan tongkat yang menggunakan sensor ultrasonik. Berikut adalah gambar tongkat tunanetra otomatis :
Gambar 15 Pengujian Tongkat Tunanetra Otomatis Bagian Depan
Gambar 16 Pengujian Tongkat Tunanetra Otomatis Bagian Samping
Dalam prosedur pengujian alat ini jarak yang penulis buat untuk mengukur objek atau benda yang akan di deteksi sensor ultrasonik adalah 0 – 50 cm.
4. PENUTUP
Adapun Kesimpulan dan Saran mengenai Alat Bantu Navigasi Tunanetra Otomatis antara lain :
4.1 Kesimpulan
Beberapa hal yang dapat dijadikan kesimpulan mengenai alat bantu navigasi tunanetra otomatis antara lain:
a. Dengan menggunakan Sensor Ultrasonik sebagai pemberi tahu bahwasannya ada sebuah objek atau halangan di depan, kiri dan kanan penyandang tunanetra saat berjalan.
b. Sebagai alat bantu navigasi tunanetra otomatis saat berjalan dengan sensor ultrasonik sebagai pemberi tahu adanya sebuah objek atau halangan, motor servo sebagai pemberitahu adanya objek yang datang dari kiri dan kanan dan menggunakan Arduino Uno sebagai otak pengendali pada semua alat.
4.2 Saran
Beberapa hal yang dapat dijadikan saran – saran mengenai alat bantu navigasi tunanetra otomatis antara lain :
a. Perlu ditambahkannya sensor getar (vibration) untuk mendeteksi suatu objek atau halangan dengan merasakan adanya getaran ketika penyandang tunanetra berjalan.
b. Untuk pengembangan selanjutnya sebaiknya ditambahkan alat pengisi baterai atau powerbank otomatis, agar alat ini lebih efisien ketika baterai telah habis. c. Diharapkan untuk pengembangan
selanjutnya tidak lagi menggunakan tongkat sebagai alat bantu tunanetra, melainkan menggunakan headset dan smartphone yang telah dirancang khusus untuk mengetahui adanya objek atau halangan saat peyandang tunanetra berjalan.
[1] Andrianto, Heri dan Aan Darmawan.2015.Arduino Belajar cepat dan Pemograman, Bandung. Informatika Bandung.
[2] Purwanto, 2010. Pengendali Motor Servo
DC Standard Dengan Berbasis
Mikrokontroler AVR ATMEGA 8535, Jurnal. Teknik Elektro. Universitas Gundarma.
[3] Syam, Rafiuddin. 2013. Dasar Dasar
Teknik Sensor.Fakultas Teknik
Universitas Hasanuddin. Makassar. [4] Unikom,2007.Buzzer.http://elib.unikom.