1
RANCANG BANGUN ALAT BANTU UNTUK TUNANETRA MENGGUNAKAN SENSOR ULTRASONIK DAN SISTEM PENENTUAN LOKASI BERBASIS MOBILE
Ahmad Fauzan, Tjut Awaliyah Zuraiyah1, Agus Ismangil2 Program Studi Ilmu Komputer Fakultas MIPA – Universitas Pakuan
Jl.Pakuan PO BOX 452, Bogor Telp/Fax (0251) 8375 547 Email: [email protected]
Seorang tunanetra mempunyai keterbatasan dalam indra penglihatan, maka proses pembelajaran menekankan pada alat indra yang lain yaitu indra peraba dan pendengaran. Pada umumnya untuk bergerak dan berpindah tempat, penyandang tunanetra menggunakan alat bantu tongkat atau anjing yang terlatih untuk membantu pergerakan dan mengetahui benda yang ada di sekitar. Dalam memakai tongkat ini memerlukan proses pelatihan agar tongkat dapat digunakan dengan baik. Kekurangan lainnya yaitu keluarga atau kerabat penyandang tunanetra tidak mengetahui keberadaan atau posisi dari penyandang tunanetra apabila penyandang tunanetra bepergian sendiri. Berdasarkan permasalahan yang telah dipaparkan, akan dibuat sebuah alat bantu untuk tunanetra dengan menggunakan sensor ultrasonik dan sistem penentuan lokasi berbasis mobile. Tujuannya adalah merancang bangun alat bantu bagi tunanetra menggunakan sensor ultrasonik dan sistem penentuan lokasi berbasis mobile dan metode yang digunakan menggunakan metode penelitian bidang Hardware Programming. Alat ini dapat mendeteksi halangan atau benda dalam jarak 0cm – 60cm dan alat ini dapat mengeluarkan suara yang dihasilkan oleh buzzer sebagai informasi kepada pemakai Untuk sistem penentuan lokasi yang digunakan adalah GPS yang menggunakan sim card GSM. GPS dapat dilacak dengan cara menghubungi nomer telepon sim card yang terpasang pada GPS, kemudian GPS akan mengirimkan sms berupa link koordinat yang dapat dibuka pada aplikasi google maps.
Kata Kunci : Tunanetra, Alat Bantu, Sensor Ultrasonik, Sistem Penentuan Lokasi PENDAHULUAN
1.1 Latar Belakang
Konsekuensi dari seorang tunanetra diantaranya keterbatasan kemampuan aktivitas dalam orientasi dan mobilitas. Pada umumnya untuk bergerak dan berpindah tempat penyandang tunanetra menggunakan alat bantu tongkat atau anjing yang terlatih untuk membantu pergerakan dan mengetahui benda yang ada di sekitarnya. Pada umumnya untuk bergerak dan berpindah tempat, penyandang tunanetra menggunakan alat bantu tongkat untuk mengetahui benda yang ada di sekitarnya. Keahlian dalam memakai tongkat ini memerlukan proses pelatihan yang terstuktur agar tunanetra dapat menggunakan tongkat dengan baik. Pada era teknologi ini telah diciptakan bermacam-macam alat berbasis teknologi untuk memudahkan mobilitas seorang tunanetra. Salah satunya adalah alat navigasi berbasis Global Positioning System. Alat ini dapat memberikan
informasi dan lokasi bagi tunanetra saat tersesat di jalan atau dalam keadaan darurat.
Berdasarkan permasalahan yang telah dipaparkan di atas akan sebuah alat bantu untuk gerak dan aktivitas bagi tunanetra dengan menggunakan sensor ultrasonik dan sistem penentuan lokasi berbasis mobile.
Diharapkan dengan dibuatnya alat bantu untuk tunanetra ini dapat memberikan manfaat dan membantu penyandang tunanetra dalam menjalankan aktifitas secara mandiri.
1.2 Tujuan Penelitian
Tujuan dari penelitian ini adalah merancang bangun alat bantu bagi tunanetra menggunakan sensor ultrasonik dan sistem penentuan lokasi berbasis mobile.
1.3 Ruang Lingkup
Ruang lingkup pembuatan laporan penelitian mencakup :
2 sebagai mikrokontroller untuk
meminimalisir bentuk alat agar tidak terlalu besar bila dipakai.
2. Sensor yang digunakan adalah sensor ultrasonic yang bertujuan untuk mengukur jarak benda.
3. Output yang digunakan berupa buzzer 4. Menggunakan Global Positioning System (GPS) berbasis seluler untuk dapat
mempermudah dalam melacak posisi penyandang tunanetra.
1.4 Manfaat Penelitian
Diharapkan alat ini dapat memberikan manfaat sebagai berikut :
1. Memaksimalkan manfaat dari sensor ultrasonik.
2. Memberikan kemudahan bagi tunanetra dalam berjalan dan beraktivitas.
3. Memaksimalkan fungsi dari GPS (Global Positioning System) dan smartphone.
TINJAUAN PUSTAKA 2.1.1 Tunanetra
Tunanetra adalah individu yang memiliki lemah penglihatan atau akurasi penglihatan kurang dari 6/60 setelah dikoreksi atau tidak lagi memiliki penglihatan. Karena tunanetra memiliki keterbataan dalam indra penglihatan maka proses pembelajaran menekankan pada alat indra yang lain yaitu indra peraba dan indra pendengaran. (Kaufman & Hallahan, 2009).
Gambar 1. Tunanetra 2.1.2 Arduino
Arduino adalah pengendali mikro single-board yang bersifat open-source, diturunkan dari Wiring platform, dirancang untuk memudahkan penggunaan elektronik dalam berbagai bidang. Hardwarenya memiliki prosesor Atmel AVR dan softwarenya memiliki bahasa pemrograman sendiri. (Hendriono, 2010).
Gambar 2. Arduino 2.1.3 Smartphone
Smartphone merupakan telepon genggam yang mempunyai kemampuan dengan pengunaan dan fungsi yang menyerupai komputer. ponsel cerdas dapat dibedakan dengan telepon genggam biasa dengan dua cara fundamental, yakni bagaimana mereka dibuat dan apa yang mereka bisa lakukan (Rasjid, 2014).
Gambar 3. Smartphone 2.1.4 Global Positioning System
Global Positioning System atau yang biasa disebut dengan GPS merupakan sistem navigasi satelit yang pada awalnya didesain untuk digunakan Amerika Serikat pada perang Vietnam. Namun saat ini GPS telah dikembangkan oleh Departemen Pertahanan Amerika serikat untuk bisa dipergunakan untuk keperluan sipil maupun militer yang terdiri dari 27 satelit yang beroperasi pada orbit dan mengirimkan lintang, bujur, serta ketinggian diatas permukaan air laut untuk penentuan posisi. GPS dapat dapat digunakan untuk mencari posisi secara tepat dan cepat serta dapat digunakan pada segala cuaca pada siang maupun malam hari. GPS yang terdiri dari space segmen yang terdiri dari satelit-satelit GPS, control segmen yang terdiri dari stasiun monitor dan kontrol satelit yang tersebar di seluruh permukaan bumi, dan user segmen yang terdiri dari pengguna di darat, laut, dan udara (Van Der Spek et al, 2009).
Gambar 4. Global Positioning System 2.1.5 Sensor Ultrasonik
3 Sensor ultrasonik adalah sebuah sensor yang berfungsi untuk mengubah besaran fisis (bunyi) menjadi besaran listrik dan sebaliknya. Cara kerja sensor ini didasarkan pada prinsip dari pantulan suatu gelombang suara sehingga dapat dipakai untuk menafsirkan eksistensi (jarak) suatu benda dengan frekuensi tertentu. Disebut sebagai sensor ultrasonik karena sensor ini menggunakan gelombang ultrasonik. (Hari Santoso, 2014)
Gambar 5. Sensor Ultrasonik
METODE PENELITIAN
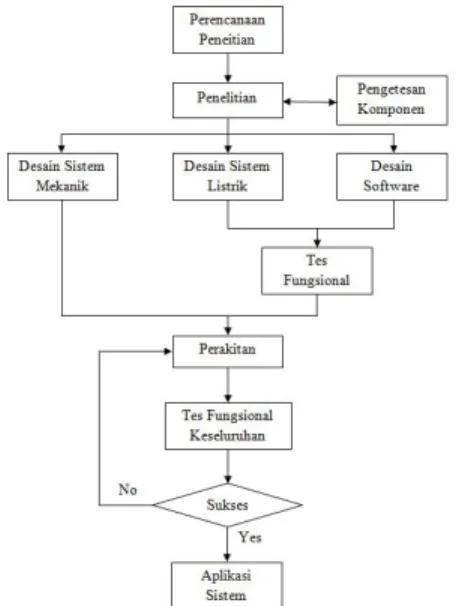
Metode yang digunakan dalam pembuatan Rancang Bangun Alat Bantu Untuk Tunanetra Menggunakan Sensor Ultrasonik Dan Sistem Penentuan Lokasi Berbasis Mobile ini menggunakan Metode Penelitian bidang Hardware Programming yang ditunjukan pada Gambar 6.
Gambar 6. Metode Penelitian bidang Hardware Programming
3.1.1 Perencanaan Penelitian
Dalam tahapan ini terdapat beberapa hal yang perlu ditentukan dan dipertimbangkan, antara lain :
a.Kerangka awal penelitian, b. Estimasi kebutuhan, c.Estimasi anggaran, dan
d. Kemungkinan penerapan dari aplikasi yang akan dirancang
3.1.2 Penelitian
Setelah tahap perencanaan selesai, dilanjutkan dengan tahap penelitian awal dari sistem yang akan dibuat, mulai dari pemilihan dan pengetesan komponen hingga pembuatan sketsa alur sistem.
3.1.3 Pengetesan Komponen
Pada tahap pengetesan komponen dilakukan pengetesan alat terhadap fungsi kerja komponen berdasarkan kebutuhan dari sistem yang akan dibuat.
3.1.4 Desain Sistem Mekanik
Tahap desain sistem mekanis merupakan tahap dilakukannya pertimbangan meliputi kebutuhan sistem yang akan dibuat terhadap desan mekanik, diantaranya:
a.
Merancang box penempatan komponen agar komponen dapat terpasang dengan baik dan terlihat rapi.b.
Penempatan modul-modul elektronik. 3.1.5 Desain Sistem ElektrikDalam tahap desain sistem elektrik terdapat beberapa hal yang harus diperhatikan, antara lain :
a. Sumber catu daya
b. Kontroler yang akan digunakan c. Modul driver untuk pendukung sistem d. Pengetesan sistem listrik yang telah
dirancang
3.1.6 Desain Perangkat Lunak
Desain perangkat lunak yang digunakan dalam penelitian ini menggunakan perangkat lunak Arduino IDE. Sedangkan untuk melacak lokasi akan menggunakan software web browser dari smartphone.
3.1.7 Tes Fungsional
Tahap tes fungsional dilakukan integrasi sistem elektrik dan software yang telah didesain. Tes ini dilakukan untuk meningkatkan performa dari perangkat lunak untuk me-manage sistem elektrik dan meminimalkan Bugs dari sistem yang akan dibuat.
4 Setelah sistem elektrik diintegrasi dengan software dan sistem kontrol, selanjutnya diintegrasi dalam struktur mekanik yang telah didesain.
3.1.9 Tes Fungsional Keseluruhan
Pada tahapan ini dilakukan pengetesan fungsi dari keseluruhan sistem yang telah terintegrasi keseluruhannya.
3.1.10 Aplikasi Sistem
Aplikasi sistem dilakukan untuk meningkatkan performa dari sistem yang telah dibuat.
PERANCANGAN DAN IMPLEMENTASI 4.1 Perencanaan Proyek Penelitian
Berdasarkan metodologi yang digunakan langkah pertama adalah melakukan perencanaan proyek penelitian dengan pokok permasalahan kemudahan pengguna dalam menggunakan alat bantu untuk tunanetra dengan Alat Bantu Untuk Tunanetra Menggunakan Sensor Ultrasonik Dan Sistem Penentuan Lokasi Berbasis Mobile. Dengan hal ini penyandang tunanetra dapat beraktivitas dan berjalan secara mandiri tanpa perlu pendamping dan GPS ini berfungsi melacak pemakai alat bantu.
Alat ini difungsikan menggunakan sensor ultrasonik. Alat ini akan berbunyi apabila ada penghalang yang berada di depan pengguna, bila semakin dekat penghalang bunyi bip akan semakin besar. Pada GPS, alat ini difungsikan menggunakan sim card GSM yang akan terhubung secara nirkabel melalui media Smartphone. GPS ini akan memberikan sms lokasi pengguna berupa link yang nantinya dapat diakses di web browser atau aplikasi Google Maps.
4.2 Penelitian
4.2.1 Gambaran Umum Sistem
Perencanaan dari masalah telah didapat maka selanjutnya adalah langkah penelitian, mencari referensi dan melihat penelitian sebelumnya didapat kebutuhan komponen yang nantinya akan dirangkai dan diintegrasikan
dengan sistem alat bantu untuk tunanetra dan sistem penentuan lokasi pada alat elektronik dalam garis besar kebutuhan alat adalah sebagai berikut :
1. Alat input yang akan mengirimkan sinyal secara nirkabel kepada modul.
2. Alat penerima sinyal dari alat input.
3. Alat pemrosesan sinyal dan penyimpanan program juga sebagai alat kontrol output.
Dari konsep di atas didapat komponen - komponen yang harus tersedia agar alat dapat dirangkai dan alat penunjangnya sebagai berikut : 1. Komputer
Komputer atau laptop digunakan sebagai uploader program yang dirancang didalam aplikasi Arduino bahasa yang digunakan adalah C, interface laptop dengan arduino menggunan komunikasi serial USB, laptop yang digunakan memiliki spesifikasi sebagai berikut :
a. Prosesor Intel Celeron 1.50GHz. b. RAM 2 GB
c. Hardisk 500GB
d. Operating System Windows 7 Ultimate 64-Bit
2. Komponen Alat
a. Modul Arduino Nano b. Kabel jumper
c. Sensor Ultrasonik SR-05 d. Baterai 9volt
e. GSM/GPS Tracker.
f. Box penyimpanan alat setelah selesai dirangkai. Box dirancang menggunakan bahan akrilik putih dengan ketebalan 2mm, ukuran box adalah 14x6x4cm.
Gambar 7. Box Penyimpanan Komponen 3. Software
Software compile dan builder yang digunakan adalah Arduino 1.6.3 for Windows. Sedangkan untuk melacak lokasi menggunakan aplikasi google maps atau web browser untuk smartphone.
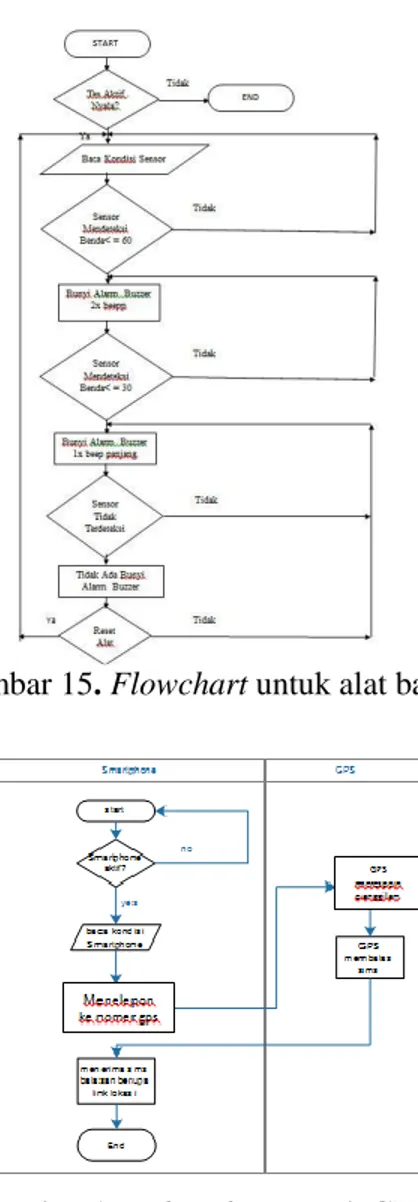
5 4.2.2 Prinsip Kerja Sistem
Pada kondisi normal, sensor akan berbunyi beep sebanyak 1 kali dengan jeda tiap beep 5 detik. Apabila sensor mendeteksi benda sejauh 30cm – 60cm pada benda di depannya, maka output yang di keluarkan berupa alarm buzzer 2 kali (beeepp….beeeepp….) alarm ini akan bunyi terus menerus sampai sensor tidak terhalang oleh benda di depannya. Sedangkan jika sensor mendeteksi benda sejauh 0cm – 29cm pada benda di depannya, maka output yang di keluarkan berupa alarm buzzer 1 kali panjang (beeepp...) alarm ini akan bunyi terus menerus sampai sensor tidak terhalang oleh benda di depan
Sedangkan cara kerja GPS tracker akan memberikan sinyal posisi koordinat longitude dan latitude berupa sms pada orang yang menelepon ke nomor SIM Card yang tertanam di GPS tersebut.
4.3 Pengetesan Komponen
Pada tahap ini semua komponen akan dites apakah berfungsi dengan baik atau sebaliknya, tes dilakukan dengan cara menghidupkan komponen dan menghubungkannya ke catu daya atau menggunakan multimeter.
4.3.1 Pengetesan Arduino Nano
Arduino Nano dapat diuji dengan cara yaitu dengan menghubungkannya dengan USB. Bila lampu indikator “ON” menyala dan berkedip atau arduino terdeteksi pada laptop maka komponen berfungsi dengan baik.
Gambar 8. Jalur dan Fungsi Pada Arduino Nano 4.3.2 Pengetesan Sensor Ultrasonik
Pengujian selanjutnya adalah sensor ultrasonik. Jalur pada ultrasonik dapat dilihat pada gambar di bawah ini :
Gambar 9. Jalur dan Fungsi Pada Ultrasonik Uji coba dilakukan dengan cara menghubungkan pin VCC, GND (0V), pin Trigger dan pin Echo bila pin tersebut dihubungkan dengan daya yang sesuai maka sensor akan aktif selanjutnya menggunakan buzzer sebagai tanda bahwa di depan sensor tersebut terdapat penghalang atau benda, bila jarak benda semakin dekat bunyi dari buzzer akan semakin kuat.
4.3.3 Pengetesan GPS Tracker
GPS tracker berfungsi sebagai pelacak baik untuk mobil, motor, dan lain-lain.GPS tracker akan memberikan sinyal posisi koordinat longitude dan latitude saat menelepon ke nomor SIM Card yang tertanam di GPS tersebut.
Gambar 10. GPS Tracker. 4.3.4 Pengetesan Kabel Jumper
Kabel jumper berfungsi menghubungkan antar komponen bila jumper terputus maka rangkaian tidak akan berfungi maka dari itu digunakan multimeter untuk menguji kabel jumper dan kabel kelistrikan terhubung, tidak terputus. Pengujian dilakukan dengan menghubungkan salah satu ujung kabel dengan salah satu kabel pada multimeter arahkan multimeter untuk pengetesan hambatan atau Ohm(Ω), bila output 0.00 maka kabel berfungsi dengan baik, namun bila output 1 maka kabel terputus dan tidak bisa digunakan.
4.4 Desain Sistem Mekanik
Perancangan sistem perangkat keras, desain sistem merupakan hal penting yang harus dipertimbangkan. Pada umumnya kebutuhan aplikasi terhadap desain antara lain:
6 1. Bentuk dan ukuran rangka dibuat untuk
menghasilkan sistem yang efisien dalam pengerjaan dan penggunaan.
2. Rangkaian sistem dibuat untuk menghasilkan sistem yang lebih efektif dalam penggunaan jumper untuk menghindari kesalahan.
3. Penempatan modul dan komponen elektronik dibuat untuk menghasilkan bentuk akhir yang ideal.
Gambar 11. Desain Sistem Mekanik 4.4.1 Perancangan Hardware (Alat)
Perancangan hardware secara umum digambarkan pada blok diagram seperti terlihat dalam gambar 7.
Gambar 12. Diagram Blok Sistem
Penjelasan dari diagram blok rancang bangun alat untuk tunanetra menggunakan sensor ultrasonic dan sistem penentuan lokasi berbasis mobile sebagai berikut:
a. Input
Input yang digunakan yaitu berupa sensor ultrasonik sebagai pengukur jarak sedangkan untuk GPS menggunakan SIM card untuk pelacakan lokasi.
b. Proses
Input sensor ultrasonik dihubungkan pada mikrokontroler untuk diproses dari program (coding) sesuai dengan kondisi yang telah dibuat pada program Arduino.
Sedangkan smartphone digunakan untuk menyimpan nomer telepon SIM Card yang terpasang pada GPS untuk proses melacak.
c. Output
Setelah diproses pada mikrokontroler maka akan menghasilkan output sesuai dari inputan yang telah diberikan kondisi. Seperti input sensor ultrasonik akan menghasilkan output berupa suara (buzzer) sesuai dengan kondisi yang diberikan pada program (coding) dan GPS akan mengirim pesan apabila pengguna smartphone menelepon nomer yang terpasang pada GPS yang berisikan koordinat longitude dan latitude yang dapat di akses pada google maps.
4.5 Desain Sistem Listrik
4.5.1 Desain Sistem Listrik Komponen Alat Dan GPS
Komponen alat harus saling terhubung satu sama lain dengan menggunakan jumper setiap komponen akan dihubungkan sesuai dengan kebutuhan, agar alat dapat berfungsi dengan baik seperti gambar skema dibawah ini :
Gambar 13. Skema rangkaian komponen alat.
Gambar 14. Skema Rangkaian GPS 4.6 Desain Software
Pembuatan perangkat lunak sistem harus mengutamakan cara kerja yang efisien berikut
SMARTPHONE/ SMS
7 flowchart dari desain software yang digunakan. Flowchart alat bantu dan flowchart GPS terdapat pada gambar 15 dan 16.
Gambar 15. Flowchart untuk alat bantu
Gambar 16. Flowchart untuk GPS
Agar software dapat berfungsi sebagai mana mestinya, dan berfungsi dengan baik, untuk melakukan trial and error dilakukan di aplikasi Arduino 1.6.3, nantinya program akan di upload ke dalam arduino.
Gambar 17. Aplikasi Arduino 1.6.3 Untuk sistem pelacakan lokasi berbasis mobile, user dapat melacak gps yang terpasang
pada alat bantu dengan cara menelepon nomer sim card yang terpasang di gps, kemudian gps akan mengirimkan sms secara otomatis berupa koordinat lokasi yang dapat diakses melalui aplikasi google maps atau web browser di Smartphone.
Gambar 18. Aplikasi Google Maps 4.7 Tes Fungsional
Tes fungsional dilakukan untuk menguji langkah sofware design dan sistem kelistrikan pertama melakukan upload program ke dalam arduino dengan cara menghubungkan arduino dengan laptop lalu mengetikkan program pada halaman sketch, lakukan compiling dan upload jika program mengeluarkan error maka kemungkinan arduino tidak terdeteksi atau ada kesalahan pada program.
Gambar 19. Proses Compiling dan Upload Arduino.
4.7 Integrasi atau Perakitan
Langkah selanjutnya adalah perakitan komponen alat menjadi satu setelah alat berfungsi dengan baik dan tidak ditemukan masalah pada program yang sudah dibuat. Alat yang sudah dirangkai secara sistem kelistrikannya dan desain software selanjutnya diintegrasikan dengan desain mekanik yang sudah dilakukan sebelumnya dan hasilnya seperti gambar di bawah ini.
8 Gambar 20. Perakitan Alat ke dalam Box
4.9 Tes Secara Keseluruhan
Tes secara keseluruhan dilakukan dengan cara menguji apakah alat berfungsi setelah alat dimasukkan ke dalam box dan tidak terganggu kinerjanya. Tabel mekanisme sistem alat dapat dilihat di bawah ini :
Tabel 1. Tes Keseluruhan Untuk Fungsi Alat Bantu
Tabel 2. Tes Untuk Fungsi GPS
4.10 Aplikasi
Aplikasi adalah pemasangan alat ke dalam case akrilik setelah alat selesai didesain baik secara software, sistem kelistrikan dan mekanik. Selanjutnya perakitan alat yang telah dipasang case dapat dilihat pada gambar di bawah ini.
Gambar 21. Alat Yang Telah Terpasang Di Dalam Case
HASIL DAN PEMBAHASAN 5.1 Hasil Penelitian
Model terbuat dari akrilik dengan tinggi ± 4cm, panjang ± 14cm dan lebar ± 6cm. Sensor
ultrasonik dihubungkan dengan Arduino nano dan digunakan sebagai pendeteksi benda atau halangan. Apabila ada benda atau halangan tepat berada di depan sensor ultrasonik, buzzer berfungsi sebagai output yaitu memberikan peringatan berupa bunyi. GPS yang terpasang pada alat adalah GPS yang dapat melacak melalui nomer sim card (GSM). Sumber daya yang digunakan untuk alat menggunakan battery 9v, sedangkan untuk GPS menggunakan battery Li-ion 3.7V 1000mAh
.
Gambar 22. Keseluruhan Sistem 5.2 Tes Fungsional Keseluruhan Sistem
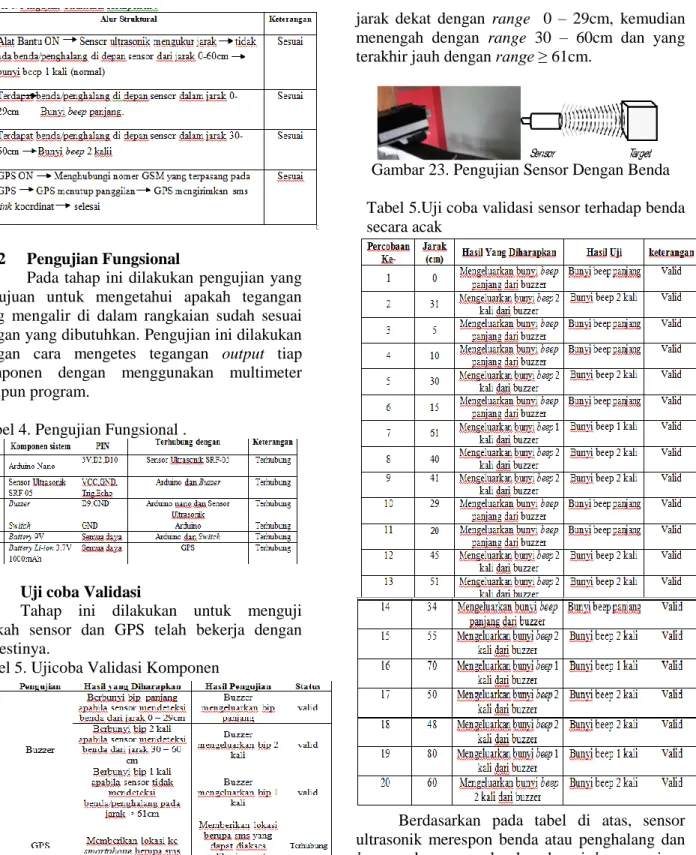
Tahapan ini dilakukan pengetesan fungsi dari keseluruhan sistem. Apakah dapat berfungsi sesuai dengan konsep atau tidak. Bila ada sistem yang tidak dapat bekerja dengan baik, maka harus dilakukan proses perakitan ulang setiap bagian sistemnya. Pengujian ini meliputi pengujian struktural, fungsional dan validasi. 5.2.1 Pengujian Struktural
Pada tahap ini dilakukan pengujian yang bertujuan untuk mengetahui apakah jalur-jalur rangkaian sudah terhubung dengan benar sehingga sistem dapat berjalan berfungsi dengan baik. Pengujian ini dilakukan dengan mengetes jalur-jalur rangkaian menggunakan multimeter. Berikut tabel hasil pengujian struktural sistem. Tabel 3. Pengujian Struktural Komponen .
9 5.2.2 Pengujian Fungsional
Pada tahap ini dilakukan pengujian yang bertujuan untuk mengetahui apakah tegangan yang mengalir di dalam rangkaian sudah sesuai dengan yang dibutuhkan. Pengujian ini dilakukan dengan cara mengetes tegangan output tiap komponen dengan menggunakan multimeter maupun program.
Tabel 4. Pengujian Fungsional .
5.3 Uji coba Validasi
Tahap ini dilakukan untuk menguji apakah sensor dan GPS telah bekerja dengan semestinya.
Tabel 5. Ujicoba Validasi Komponen
5.3.1. Pengujian Sensor Ultrasonik Terhadap Jarak Benda
Pengujian sensitivitas sensor ultrasonik terhadap benda dilakukan dengan cara meletakan benda di depan sensor dengan jarak mulai dari
jarak dekat dengan range 0 – 29cm, kemudian menengah dengan range 30 – 60cm dan yang terakhir jauh dengan range ≥ 61cm.
Gambar 23. Pengujian Sensor Dengan Benda Tabel 5.Uji coba validasi sensor terhadap benda secara acak
Berdasarkan pada tabel di atas, sensor ultrasonik merespon benda atau penghalang dan buzzer akan mengeluarkan bunyi beep panjang yang menandakan bahwa benda atau penghalang yang ada di depan sensor berada sangat dekat, kemudian, ketika benda atau penghalang dalam jarak 30cm - 60cm di depan sensor , buzzer akan mengeluarkan bunyi beep 2 kali. Pengujian dengan jarak ≥ 61cm sensor bekerja secara
10 normal kembali dan buzzer hanya bunyi beep 1 kali dengan jeda 2 detik tiap beep selama tidak ada sama sekali benda atau penghalang yang berada di depan sensor.
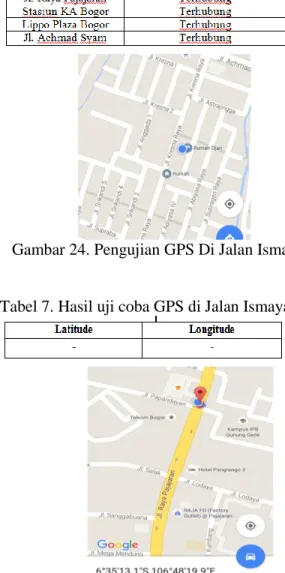
5.3.2 Uji Coba Validasi Jangkauan Dan Ketepatan GPS
Pada tahap uji coba validasi jangkauan koneksi dan ketepatan pelacakan lokasi GPS dilakukan pada 5 lokasi berbeda dengan kondisi di sebuah jalan dan berada dalam suatu gedung atau bangunan.
Tabel 6. Pengujian Jangkauan Koneksi GPS
Gambar 24. Pengujian GPS Di Jalan Ismaya 2
Tabel 7. Hasil uji coba GPS di Jalan Ismaya 2
Gambar 25. Pengujian GPS Di Jalan Raya Pajajaran
Tabel 8. Hasil uji coba GPS di Jalan Raya Pajajaran
Berdasarkan uji coba jangkauan koneksi dan ketepatan pelacakan lokasi GPS dapat disimpulkan terdapat perbedaan pada pelacakan lokasi. Uji coba yang dilakukan di Jl.Ismaya 2 pengguna berada di dalam gedung atau rumah sehingga latitude dan longitude tidak didapatkan namun lokasi dapat dillacak. Sedangkan untuk uji Jl.Raya Pajajaran dilakukan diruangan terbuka atau jalan sehingga latitude dan longitude dapat dilihat.
KESIMPULAN DAN SARAN 6.1 Kesimpulan
Kesimpulan untuk alat bantu dengan sensor ultrasonik adalah alat ini dapat mendeteksi halangan, sensor ultrasonik sangat efisien dalam jarak 1cm – 60cm. Alat ini dapat mengeluarkan suara buzzer, sebagai informasi kepada pemakai alat bantu ini. Untuk sistem penentuan lokasi berbasis mobile GPS yang digunakan adalah GPS yang menggunakan sim card GSM. GPS dapat dilacak dengan cara menghubungi nomer telepon sim card yang terpasang pada GPS. Kemudian GPS akan menutup telepon dan akan mengirimkan sms berupa link koordinat yang dapat dibuka pada aplikasi google maps.
Kelebihan alat ini adalah, penyandang tunanetra dapat melakukan aktivitas secara mandiri, dengan adanya sensor ultrasonik yang terpasang pada alat bantu ini, penyandang tunanetra dapat mendeteksi benda atau penghalang yang berada di sekitarnya dan keluarga penyandang tunanetra dapat melacak lokasi pengguna dengan adanya GPS yang terpasang pada alat bantu, dengan cara cukup dengan melakukan panggilan ke nomer yang tertanam pada GPS, GPS akan memberikan lokasi pengguna yang dapat dilacak di aplikasi google maps pada smartphone. Alat ini juga mudah dirubah baik secara fungsi dan program karena berbasis open source dengan bahasa pemrograman C++ dan modul arduino yang mudah dikoneksikan dengan laptop maupun komputer dengan koneksi USB.
Sistem ini juga masih banyak kekurangan diantaranya,apabila berada ditempat ramai atau bising suara buzzer yang dihasilkan kurang
11 terdengar. Kemudian untuk GPS yang digunakan terbatas pada pulsa dan jangkauan sinyal, apabila GPS berada di tempat yang sulit adanya sinyal atau tidak adanya pulsa pada sim card yang terpasang pada GPS, maka GPS tidak dapat mengirimkan lokasi untuk melacak pengguna. 6.2 Saran
Alat bantu untuk tunanetra ini masih belum sempurna, sehingga dibutuhkan penyempurnaan agar sistem memiliki nilai fungsional yang kompleks. Beberapa saran yang dapat dikembangkan antara lain adalah penggunaan teknologi seperti penggunaan kamera untuk merekam benda yang ada di depan pengguna kemudian menginformasikannya melalui earphone dan pemberian sumber daya yang lebih baik untuk modul Arduino dan GPS yang digunakan dapat memberikan sinyal SOS ke smartphone apabila penyandang tunanetra membutuhkan bantuan atau terjadi keadaan darurat.
DAFTAR PUSTAKA
Aqli Kharisma, C. 2014. Perancangan Alat Bantu Mobilitas Bersuara Dalam Ruangan Bagi Tunanetra Berbasis RFID (Radio Frequency Identification), Jurusan Teknik Elektro, Universitas Brawijaya, Malang.
Arminda & Hendriawan & Akbar & Sultijono. 2013. Desain Sensor Jarak Dengan Output Suara Sebagai Alat Bantu Jalan Bagi Penyandang Tunanetra, Jurusan Teknik Elektronika, Politeknik Elektronika Negeri, Surabaya.
Budiharto. 2010. Elektronika Digital dan Mikroprosesor. Yogyakarta: Andi.
Budiharto. 2012. Robot Vision. Yogyakarta: Andi.
Dede Hendriono. 2014. Arduino Itu Apa (https://www.Hendriono.com 15 Januari 2016). Datasheet Ultrasonic (www.elecfreaks.com 3/9/2016 7:17AM)
Hari Santoso. 2015. Ultrasonik (http://www.elangsakti.com/2015/05/sensor-ultrasonik.html 4/8/2016 1:31PM)
Kaufman & Hallahan. 2009. Definisi Tunanetra (www.pandek29.blogspot.co.id) diakses pada tanggal 14 Juni 2016
Rasjid, F.E. 2014. Sistem Operasi Pada Smartphone (http://www.ubaya.ac.id 15 Januari 2016).
Patrick. S. 2013. Visual Impairment Aid. (http://www.instructables.com/id/VIA-Visual-Impairment-Aid-Haptic-Sound-Feedbac/.25 Februari 2016.)
Pertuni.2013. Persatuan Tunanetra Indonesia. Jakarta Dari (http://pertuni.idp-europe.org/ diakses pada tanggal 19 Juni 2016
Van Der Spek, et al. 2009. Global Positioning System(http://www.infodanpengertian.blogspot.c om/2015/04/pengertian-global-positioning-system-gps.html) diakses pada tanggal 4 maret 2016
Wijaya & Christiyono & Sukiswo. 2010. Alat Pelacak Lokasi Berbasis GPS Via Komunikasi Seluler, Jurusan Teknik Elektro, Universitas Diponegoro, Semarang.