TUGAS AKHIR
INVERTER UNTUK MENGONTROL MOTOR INDUKSI
Diajukan untuk memenuhi salah satu syarat memperoleh gelar Sarjana Teknik pada
Program Studi Teknik Elektro Fakultas Teknik Universitas Sanata Dharma
Disusun oleh:
YOHANES DWI ATMOKO NIM: 025114044
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS SANATA DHARMA YOGYAKARTA
2007
INVERTER CONTROLLING INDUCTION MOTOR
Submitted as partial fulfillment of The requirement for Sarjana Teknik degree in Electrical Engineering Faculty of Engineering Sanata dharma University
Compiled by:
YOHANES DWI ATMOKO NIM: 025114044
DEPARTMENT ELECTRICAL ENGINEERING FACULTY OF ENGINEERING
SANATA DHARMA UNIVERSITY YOGYAKARTA
2007
MOTO:
¾
]tÇztÇ Åâwt{ áx~tÄ| ÅxÇçxÜt{ }|~t ~xtwttÇ ÅxÇ}tw| uâÜâ~? ~tÜxÇt
gâ{tÇ ux~xÜ}t w| wtÄtÅ {|wâÑ ~|àtA
¾
]|~t à|wt~ wtÑtà tÑt çtÇz ~|àt áâ~tAAAAAuxÄt}tÜÄt{ âÇàâ~ ÅxÇçâ~t| tÑt
çtÇz ~|àt wtÑtàAAA
PERSEMBAHAN:
~â ÑxÜáxÅut{~tÇ ~tÜçt ~xv|Ä~â |Ç| âÇàâ~ M
gâ{tÇ ]xáâá ^Ü|áàâá tàtá áxztÄt ~tá|{ wtÇ ~xut|~tÇ@açt
|uâ utÑt~~â }âzt ~t~t~~â wtÇ tw|~@tw|~~â àxÜv|Çàt çtÇz áxÇtÇà|tát ÅxÇwÉt~tÇ wtÇ ÅxÇztá|{| t~â
KATA PENGANTAR
Syukur kepada Tuhan yang telah melimpahkan rahmat serta kasih-Nya kepada
penulis untuk menyelesaikan tugas akhir yang berjudul “Inverter Untuk Mengontrol
Motor Induksi”.
Penulis menyadari bahwa skripsi ini tidak mungkin dapat terselesaikan dengan
baik tanpa bantuan dari berbagai pihak. Oleh karena itu penulis mengucapkan
terimakasih kepada:
1. Bapak A. Bayu Primawan, S.T.,M.Eng. selaku Kaprodi Teknik Elektro.
2. Bapak Martanto, S.T., M.T dan pak Petrus Setyo Prabowo S.T. yang telah dengan
sabar membimbing dan menyemangati serta memberikan ilmunya kepada penulis,
sehingga penulis semakin terpacu untuk menyelesaikan skripsi ini dengan
sebaik-baiknya.
3. Pak Djoko Untoro, S.si, M.T selaku pembimbing akademik
4. Segenap dosen dan karyawan Teknik atas bimbingan, ilmu dan pelayanan yang
diberikan selama ini.
5. Laboran TE mas hardi, mas mardi, mas Sur, Mas Broto serta mas Yusuf yang sering
tak repotin selama ini.
6. Ibu, Bapak, kakakku dan adik-adikku yang telah memberikan kasih sayang, dorongan
moril dan materiil kepada penulis.
7. Teman-teman TE ‘02 dan ‘03 atas segala pengalaman hidup bersama selama ini.
8. Andre “PK” , Tanto, kelik , Briatma makasih banget atas bantuaannya.
ku selama penyusunan tugas akhir ini.
10.Cah-cah kampung wiyu dimana aku tinggal, yang selalu penuh kerja keras “ angkat
sekopmu”.
11. Mitsubishi 120Ps 91 yang banyak membantu aku, “ojo rusak terus aku masih
membutuhkanmu”.
Semoga Tuhan melimpahkan rahmat-Nya kepada kita semua dan semoga tulisan ini
dapat berguna dan bermanfaat bagi penulis maupun pembaca semuanya, Amin.
Jogjakarta, Juli 2007
Penulis,
Yohanes Dwi Atmoko
DAFTAR ISI
HALAMAN JUDUL ... i
HALAMAN JUDUL (INGGRIS)... ii
HALAMAN PENGESAHAN ... iii
PERNYATAAN KEASLIAN KARYA TULIS... v
HALAMAN MOTO DAN PERSEMBAHAN... vi
KATA PENGANTAR ... vii
DAFTAR ISI... ix
DAFTAR GAMBAR ... xiii
DAFTAR TABEL ……….. xvi
DAFTAR LAMPIRAN... xvii
INTISARI ... xviii
ABSTRACT... xix
BAB I. PENDAHULUAN ... 1
1.1 Judul... 1
1.2 Latar Belakang ... 1
1.3 Perumusan Masalah ... 2
1.4 Batasan Masalah ... 2
1.5 Manfaat Penelitian ... 3
1.6 Susunan Penulisan Tugas Akhir ... 3
BAB II. DASAR TEORI ... 5
2.1 Penyearah ... 6
2.3 Pembangkit Gelombang Sinus ... 8
2.4 Buffer Tegangan ... 9
2.5 Pembangkit Gelombang Segitiga ... 10
2.6 SPWM (Sinusoidal Pulse Width Modulation) . ... 11
2.7 Transistor . ... 16
2.8 Optokopler . ... 18
2.9 Chopper Empat Kuadran . ... 18
2.9.1 Kuadran satu ... 19
2.9.2 Kuadran dua ... 20
2.9.3 Kuadran tiga ... 20
2.9.4 Kuadran empat ... 21
2.10 MOSFET ... 22
2.11 Motor Induksi Satu Fasa ... 24
2.12 Penapis Aktif Lolos Rendah ... 25
2.13 Multivibrator Astabil ... 26
2.14 D Flip-Flop... 28
2.15 Gerbang logika NAND ... 29
2.16 Pencacah Dekade ... 30
2.17 Dekoder... 32
BAB III. PERANCANGAN ... 34
3.1 Penyearah ... 35
3.2 Tapis Kapasitor ... 37
3.3 Pembangkit Gelombang Sinus... 38
3.4 Pembangkit Gelombang Segitiga... 39
3.5 SPWM... 41
3.6 Kendali Kaki Gate ... 44
3.7 Chopper... 46
3.8 Motor AC ... 47
3.9 Pewaktu... 49
3.10 Rangkaian Basis Waktu ... 51
3.11 Penampil Frekuensi Inverter... 51
3.11.1 Rangkaian Pengondisi Sinyal ... 52
3.11.2 Rangkaian Pencacah, Lacth, dan Multiplekser ... 53
3.11.3 Dekoder dan 7-segmen LED... 55
3.11 Penampil Kecepatan Motor... 55
3.11.1 Rangkaian Pengondisi Sinyal ... 56
3.11.2 Rangkaian Pencacah, Lacth, dan Multiplekser ... 57
3.11.3 Dekoder dan 7-segmen LED ... 60
BAB IV. HASIL DAN PEMBAHASAN ... 61
4.1 Cara Pengoperasian Alat... 61
4.2 Pengamatan Penyearah ... 62
4.3 Pengamatan Pembangkit Gelombang Sinus ... 63
4.4 Pengamatan pembangkit Gelombang Segitiga ... 65
4.5 Pengamatan SPWM . ... 68
4.6 Pengamatan Kendali Kaki Gate... 69
4.7.1 Pengamatan Frekuensi Motor . ... 71
4.7.2 Pengamatan Kecepatan Motor ... 75
4.7.3 Pengamatan Arus Motor . ... 79
BAB V. KESIMPULAN DAN SARAN ... 81
5.1 Kesimpulan ... 81
5.2 Saran ... 81
DAFTAR PUSTAKA ... 82
DAFTAR GAMBAR
Gambar 2.1 Jembatan penyearah gelombang penuh... 6
Gambar 2.2 Penyearah dengan filter kapasitor ... 7
Gambar 2.3 Pembangkit gelombang sinus dengan XR-2206 ... 9
Gambar 2.4 Konfigurasi buffer tegangan... 9
Gambar 2.5 Pembangkit gelombang segitiga ... 10
Gambar 2.6 Cara kerja pembangkitan gelombang segitiga ... 11
Gambar 2.7 Pembangkit sinyal SPWM ... 12
Gambar 2.8 Bentuk gelombang SPWM... 13
Gambar 2.9 Kontrol tegangan dengan mengubah nilai ma ... 14
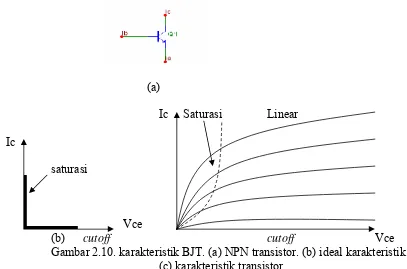
Gambar 2.10 karakteristik BJT. (a) NPN transistor. (b) ideal karakteristik (c) karakteristik transistor ... 16
Gambar 2.11 Transistor sebagai saklar... 17
Gambar 2.12 Optokopler. ... 18
Gambar 2.13 Chopper empat kuadran ... 19
Gambar 2.14 Kuadran pertama dengan tegangan dan arus beban positif... 19
Gambar 2.15 Kuadran kedua dengan tegangan beban negatif dan arus positif ... 20
Gambar 2.16 Kuadran ketiga dengan tegangan dan arus beban negatif ... 21
Gambar 2.17 Kuadran keempat dengan tegangan positif dan arus beban negatif ... 21
Gambar 2.18 Simbol MOSFET ... 22
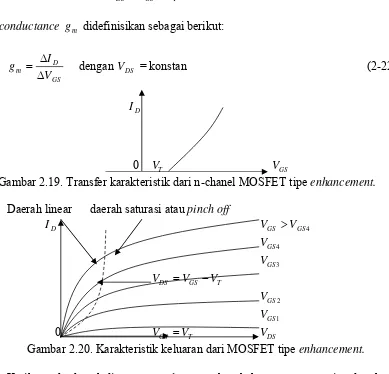
Gambar 2.19 Transfer karakteristik dari n-chanel MOSFET tipe enhancement ... 23
Gambar 2.20 Karakteristik keluaran dari MOSFET tipe enhancement... 23
Gambar 2.21 Rangkaian pensaklaran MOSFET... 24
Gambar 2.23 Motor kapasitor ... 25
Gambar 2.24 Kurva umum karakteristik penapis lolos rendah... 26
Gambar 2.25 Rangkaian penapis VCVS... 26
Gambar 2.26 Rangkaian multivibrator dengan IC 555... 27
Gambar 2.27 Rangkaian D flip-flop ... 28
Gambar 2.28 Rangkaian logika gerbang logika NAND ... 29
Gambar 2.29 (a) pencacah dekade (b) bentuk gelombang... 31
Gambar 2.30 Rangkaian dekoder BCD ke 7-segmen LED ... 33
Gambar 3.1 Blok diagram voltage source inverter... 35
Gambar 3.2 Jembatan penyearah gelombang penuh... 35
Gambar 3.3 Tapis kapasitor ... 37
Gambar 3.4 Pembangkit gelombang sinus menggunakan XR-2206 ... 39
Gambar 3.5 Pembangkit gelombang segitiga ... 41
Gambar 3.6 Rangkaian SPWM... 42
Gambar 3.7 Rangkaian kendali kaki gate... 45
Gambar 3.8 Chopper empat kuadran ... 47
Gambar 3.9 (a) Rangkaian pewaktu 1 detik, (b) Rangkaian reset dan lacth... 50
Gambar 3.10 Rangkaian basis waktu... 51
Gambar 3.11 Rangkaian penapis lolos rendah dengan fc 50Hz ... 53
Gambar 3.12 Rangkaian pengondisi sinyal ... 53
Gambar 3.13 Rangkaian penampil frekuensi dengan mengunakan IC 4553, IC 4511 dan 7-segmen LED dua digit. ... 54
Gambar 3.14 Rangkaian sensor dan pengondisi sinyal ... 57
Gambar 3.15 Rangkaian penampil kecepatan dengan menggunakan
IC 4553, IC 4511 dan 7-segmen LED tiga digit. ... 59
Gambar 4.1 Gelombang sinus dengan frekuensi 45Hz... 63
Gambar 4.2 Pengamatan Gelombang segitiga ... 65
Gambar 4.3 Pengamatan keluaran pembanding gelombang segitiga dengan sinus ... 67
Gambar 4.4Pengamatan pendeteksi perpotongan dengan nol dengan frekuensi 48Hz... 68
Gambar 4.5 Pengamatan keluaran SPWM... 69
Gambar 4.6 Pengamatan kendali kaki gate satu dan tiga... 70
Gambar 4.7 Grafik galat pada pengamatan frekuensi... 74
Gambar 4.8 Grafik galat pengukuran kecepatan... 77
Gambar 4.9 Pengaruh perubahan frekuensi terhadap kecepatan motor... 78
Tabel 2.1 Harmonisa yang ternormalisasi untuk Vo dengan mf > 21... 15
Tabel 2.2 Tabel kebenaran D flip-flop... 29
Tabel 2.3 Tabel kebenaran gerbang logika NAND ... 30
Tabel 2.4 Tabel kebenaran Pencacah dekade ... 32
Tabel 3.1 hubungan frekuensi dan kecepatan ... 48
Tabel 4.1 Pengamatan pada penyearah ... 62
Tabel 4.2 Pengamatan pada gelombang sinus ... 64
Tabel 4.3 Pengamatan pada gelombang segitiga ... 66
Tabel 4.4 Pengamatan pada kendali kaki gate... 70
Tabel 4.5 Pengamatan frekuensi ... 72
Tabel 4.6 Pengamatan kecepatan... 75
Tabel 4.7 Pengamatan pengaruh perubahan frekuensi terhadap arus dan Kecepatan... 79
DAFTAR LAMPIRAN
A. Rangkaian lengkap inverter... L1
B. Data percobaan... L2
C. Data Sheet ... L3
Elektronika daya dimanfaatkan pada peralatan elektronika di industri dan rumah tangga. Inverter memberikan kemudahan dalam pengaturan kecepatan motor AC, inverter merupakan konverter tegangan DC ke tegangan AC. Dengan menggunakan inverter modulasi lebar pulsa dimungkinkan tegangan keluaran AC dapat mendekati bentuk gelombang sinus, sehingga disebut modulasi lebar pulsa sinus. Gelombang sinus dengan frekuensi yang dapat diatur dibandingkan dengan gelombang segitiga dengan frekuensi tetap.
Pada perancangan ini dijelaskan perancangan inverter 1 fasa. Gelombang sinus dengan frekuensi yang dapat diatur dari 15Hz sampai dengan 50Hz dibandingkan dengan gelombang segitiga dengan frekuensi 2000Hz. Hasil pembandingan merupakan sinyal modulasi lebar pulsa sinus dengan rasio modulasi amplitudo =1 dan rasio modulasi frekuensi minimal adalah 40. Penyerahan masukan AC menggunakan dioda jembatan H 35MB60A, dan untuk konversi DC ke AC menggunakan chopper empat kuadran dengan pensaklaran menggunakan MOSFET 2SK2611. Tampilan frekuensi dan kecepatan putar motor ditampilkan dengan 7-segmen LED. Pengaturan frekuensi inverter dilakukan dengan mengatur frekuensi gelombang sinus.
a
m
f
m
Pada tugas akhir ini inverter yang dibuat diatur frekuensinya dari 25Hz sampai dengan 48Hz yang menghasilkan perubahan putaran dari 1470rpm sampai dengan 2870rpm, dengan menggunakan beban motor AC 220V/50Hz.
Kata kunci: inverter, modulasi lebar pulsa sinus, Pengaturan frekuensi.
ABSTRACT
Power electronics used in electronic devices of industry and household. Inverter is voltage converter DC to AC, Inverter gives amenity in speed control of AC motor. By using pulse width modulation inverter in order to shape the output AC voltage to be as close to sine wave, causing is called as sinusoidal pulse width modulation. Sine wave with variable frequency compared to triangular wave with constant frequency.
At this scheme explained the scheme of single phase inverter. Sine wave with variable frequency 15Hz up to 50Hz compared to triangular wave with frequency 2000Hz. Result of compared is modulation signal of sine pulse width with amplitude modulation ratio = 1 and frequency modulation ratio minimum is 40. The AC input is rectified through a diode bridge 30MB60A, and switch-mode DC to AC inverters applies four quadrants chopper with MOSFET 2SK2611 switches. Frequency appearance and rotation speed of motor is presented with 7-segmen LED. Frequency Control of inverter is done by arranging sine wave frequency.
a
m mf
At this final task the frequency of the inverter is arranged from 25Hz up to 48Hz gets change of rotation speed from 1470rpm up to 2870rpm, by using AC motor 220V/50Hz.
Keyword: inverter, sinusoidal pulse width modulation, frequency control.
PENDAHULUAN
1.1 Judul
Inverter Untuk Mengontrol Motor Induksi (Inverter Controlling Induction Motor)
1.2 Latar Belakang
Perkembangan teknologi elektronika memberikan kemudahan dan menambah
kenyamanan bagi semua lapisan masyarakat dalam malakukan aktifitas sehari-hari.
Elektronika daya dimanfaatkan pada berbagai peralatan elektronika yang dapat dijumpai
setiap hari antara lain televisi, dan catu daya tak terputus (UPS Uninterruptible power
supplies).
Salah satu pemanfaatan yang lain adalah dalam pengendalian motor AC.
Pengendalian putaran motor AC banyak dijumpai dalam industri antara lain pada
pengendalian blower, HPP (High Pressure Pump), sugar mills, blending, dan lain-lain.
Peralatan elektronik yang menggunakan motor AC pada rumah tangga umumnya masih
memakai peralatan mekanik, antara lain pada mixer dengan saklar mekanik dan pada
motor mesin jahit dengan menggunakan batang arang.
Pengendalian motor AC dilakukan dengan mengatur frekuensi dan atau amplitudo
tegangan yang masuk ke motor AC. Pengaturan frekuensi dan atau amplitudo dapat
dilakukan dengan menggunakan peralatan yang disebut inverter, yang merupakan suatu
konverter yang mengkonversi tegangan DC menjadi AC dengan frekuensi yang dapat
diatur.
2
1.3 Perumusan Masalah
Permasalahan yang timbul dalam penyusunan tugas akhir ini dapat dirumuskan
sebagai berikut:
1. Bagaimana merancang dan membuat piranti yang dapat mengkonversi tegangan
listrik AC PLN menjadi tegangan DC (Penyearah).
2. Bagaimana merancang dan membuat alat perangkat keras yang dapat
mengkonversi tegangan DC menjadi AC (Inverter).
3. Bagaiman merancang dan membuat piranti yang dapat mengontrol frekuensi
keluaran.
4. Pemilihan motor induksi yang akan di kontrol.
1.4 Batasan Masalah
Batasan masalah pada tugas akhir ini yaitu:
1. Inverter yang akan dirancang dan dibuat adalah Voltage Source Inverter.
2. Motor induksi yang dipakai memiliki tegangan 220V, frekuensi 50Hz, satu fasa,
dan memiliki kecepatan 3000rpm (rotation per minute).
3. Bentuk gelombang keluarannya adalah Modulasi Lebar Pulsa Sinus (SPWM,
Sinusoidal Pulse Width Modulation), dengan frekuensi pembawa 2kHz.
4. Inverter memiliki tegangan tetap dengan frekuensi yang dapat diatur pada 15Hz
sampai dengan 50Hz dan menghasilkan perubahan putaran dari 900rpm sampai
1.5 Manfaat Penelitian
Menerapkan pemanfaatan elektronika daya pada pengaturan kecepatan motor
listrik AC 1 fasa.
1.6 Susunan Penulisan Tugas Akhir
Untuk lebih memperjelas penyampaian materi laporan ini, maka dipaparkan
susunan penulisan sebagai berikut:
BABI PENDAHULUAN
Dijelaskan tentang latar belakang, rumusan dan batasan masalah yang
akan disampaikan, tujuan penulisan serta sistematika penulisan ini.
BAB II DASAR TEORI
Berisi dasar teori yang digunakan yaitu penyearah, tapis kapasitor,
SPWM, pembangkit gelombang sinus, pembangkit gelombang segitiga,
transistor sebagai saklar, MOSFET, optokopler, chopper, motor induksi
satu fasa, penapis lolos rendah, mutivibrator astabil, D flip-flop, logika
gerbang NAND, pencacah dekade, demultiplekserdan dekoder.
BAB III PERANCANGAN ALAT
Berisikan perancangan tiap bagian dari Voltage Source Inverter yaitu
penyearah, tapis kapasitor, pembangkit gelombang sinus, pembangkit
gelombang segitiga, SPWM, kendali kaki gerbang dan chopper, penampil
4
BAB IV PEMBAHASAN
Berisi hasil uji coba alat yang dibuat dan pembahasan dari penelitian yang
dilakukan.
BAB V PENUTUP
DASAR TEORI
Inverter digunakan untuk mengkonversi tegangan dari sumber DC menjadi AC.
Inverter banyak digunakan untuk mengontrol motor AC dan UPS [2]. Sumber DC bisa
didapatkan dari baterai atau dengan penyearahan dari sumber AC. Untuk penyearahan
dapat mengunakan penyearahan takterkontrol (mengunakan dioda) atau penyearahan
terkontrol (mengunakan saklar), untuk penyearahan terkontrol dapat mengunakan SCR
(Silicon Controlled Rectifier) sebagai penyaklaran.
Ada dua tipe inverter yaitu: voltage source inverters (VSIs) dan current source
inverters (CISs). Untuk VSIs dapat dibagi ke dalam tiga kategori umum yaitu:
1. PWM Inverter.
Inverter ini memiliki masukan DC yang selalu tetap, oleh karena itu inverter
harus mengendalikan amplitudo dan frekuensi dari tegangan keluaran AC.
Dengan PWM dimungkinkan tegangan keluaran AC dapat mendekati bentuk
gelombang sinus, sehingga disebut sinusoida PWM.
2. Square Wave Inverter.
Inverter ini memiliki tegangan masukan DC yang dikontrol untuk mengendalikan
amplitudo dari tegangan keluaran AC, maka inverter hanya digunakan untuk
mengontrol frekuensi dari tegangan keluaran AC. Tegangan keluaran AC
memiliki bentuk gelombang yang serupa dengan gelombang kotak.
6
3. Single Phase Inverter With Cancellation.
Dalam kasus dari inverter dengan keluaran satu fasa sangat mungkin untuk
mengendalikan amplitudo dan frekuensi keluaran, masukan dari inverter adalah
DC konstan dan pensaklaran inverter mengunakan gelombang kotak. Oleh karena
itu, inverter ini mengkombinasikan karakteristik dari kedua inverter sebelumnya.
Teknik voltage cancellation hanya bekerja pada inverter satu fasa.
2.1 Penyearah
Konverter AC ke DC secara umum dikenal dengan nama penyearah dan dioda
penyearah menyediakan tegangan DC yang pasti [4]. Penyearah gelombang penuh adalah
rangkaian yang mengubah bentuk gelombang bolak-balik menjadi searah pada seluruh
siklus gelombangnya. Rangkaian ini menggunakan metode jembatan, seperti terlihat pada
gambar 2.1.
0
D3 DIODE
R Vs
220Vac
D2 DIODE D1
DIODE
D4 DIODE
Gambar 2.1. Jembatan penyearah gelombang penuh.
Pada setengah siklus pertama bila sumber tegangan memiliki tegangan positif,
maka arus akan mengalir lewat D1, R, D4, dan menuju sumber tegangan. Pada setengah
siklus berikutnya arus akan mengalir lewat D2, R, D3, dan kembali ke sumber tegangan.
rms
m V
V = 2× (2-1)
Tegangan keluaran rata-rata adalah
m m T m dc V V tdt V T
V 2 sin 2 0.6366
0 = =
=
∫
π ϖ
π
(2-2)
Nilai rms tegangan dan arus keluaran adalah
(
)
mm T m rms V V dt t V T
V 0.707
2 sin
2 12
2 0
2 = =
⎥⎦ ⎤ ⎢⎣
⎡
=
∫
ω (2-3)R V R
V
I rms m
rms 707 . 0 = = (2-4)
2.2 Tapis Kapasitor
Penapisan dilakukan dengan menghubung paralel kapasitor dengan beban [4].
Kapasitor memperlama arus yang mengalir ke beban sehingga mengurangi ripple pada
tegangan keluaran, gambar 2.2 menunjukkan penyearah dengan tapis kapasitor. Bila
tegangan masukan melebihi tegangan kapasitor, maka kapasitor berisi muatan,
dioda-dioda (D1 dan D4 atau D2 dan D3) konduksi. Bila tegangan masukan lebih rendah dari
pada tegangan kapasitor maka dioda-dioda (D1 dan D4 atau D2 dan D3) mengalami bias
mundur dan kapasitor melepaskan muatannya melalui resistansi beban.
0 D3 DIODE R Vs 220Vac L D2 DIODE D1 DIODE Ce D4 DIODE
8
Agar arus ripple harmonisa ke-n lebih mudah melewati tapis kapasitor, impedansi beban
harus lebih besar dibandingkan kapasitor, maka:
e
C n L n R
ω
ω ) 1
( 2
2 + 〉〉
(2-5)
Dengan ω =2π× f dan f merupakan frekuensi sumber tegangan ac.
Kondisi ini dipenuhi dengan hubungan
e
C n L n R
ω
ω ) 10
( 2
2 + =
(2-6)
Dan dengan kondisi ini, pengaruh beban akan diabaikan.
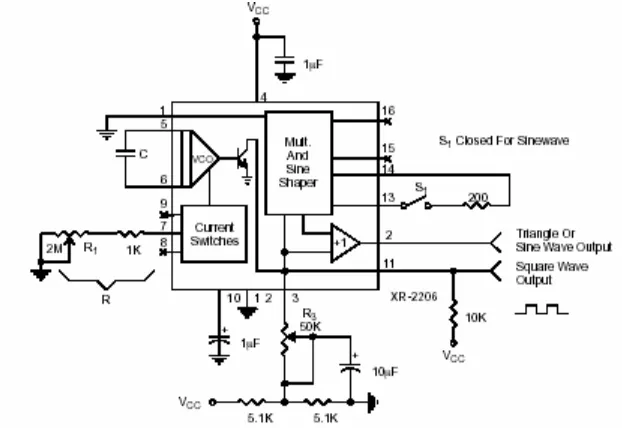
2.3 Pembangkit Gelombang Sinus
Gelombang sinus dibangkitkan oleh XR-2206 yang merupakan sebuah generator
fungsi yang mampu membangkitkan gelombang sinus, segiempat, segitiga, lereng dan
denyut dengan ketelitian yang cukup tinggi [7]. Frekuensi kerja dari XR-2206 dapat
dipilih antara rentang 0.01Hz sampai dengan lebih dari 1MHz. Rangkaian ini idealnya
digunakan pada komunikasi, instrumentasi dan generator fungsi. Frekuensi keluaran
dapat diperoleh dari persamaan 2.7.
XR-2206 dibagi dalam empat blok menurut fungsinya yaitu voltage controlled
oscillator (VCO), analog multiplier and sine shaper, buffer dan current switches. VCO
menghasilkan frekuensi yang sebanding dengan arus input, arus tersebut diperoleh dari
resistor yang dihubungkan dari terminal pewaktu dengan pentanahan. Rangkaian
pembangkit gelombang sinus seperti terlihat pada gambar 2.3.
RC
Potensiometer digunakan untuk mengatur frekuensi keluaran. Keluaran
amplitudo maksimum sebanding dengan resistor , untuk gelombang keluaran berupa
sinus, amplitudo keluaran mendekati 60mV puncak per kiloOhm.
1 R
3 R
Gambar 2.3. Pembangkit gelombang sinus dengan XR-2206.
2.4 Buffer Tegangan
Buffer tegangan berfungsi untuk mempertahankan tegangan keluaran agar tidak
terbebani oleh beban [6]. Tegangan keluaran yang dihasilkan rangkaian buffer tegangan
sama dengan tegangan masukan. Konfigurasi buffer tegangan seperti pada gambar 2.4.
+
-Op1 3
2 6
7
4
Vo Vin
10
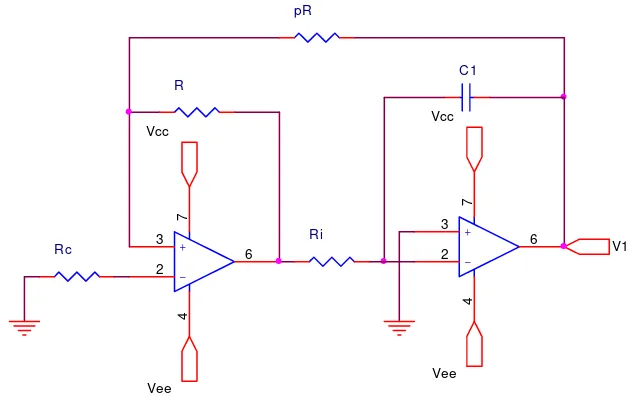
2.5 Pembangkit Gelombang Segitiga
Gelombang segitiga dibangkitkan mengunakan dua buah OpAmp (Operational
Amplifier), OpAmp yang pertama digunakan untuk menghasilkan tegangan kotak dan
OpAmp yang kedua sebagai integrator yang menghasilkan tegangan segitiga[6].
Rangkaian pembangkit gelombang segitiga ditunjukkan pada gambar 2.5.
Vee
Vcc
+
-3
2 6
7
4
Rc +
-3
2 6
7
4
Vcc
V1 pR
Vee C1
Ri R
Gambar 2.5. Pembangkit gelombang segitiga.
Cara kerja pembangkitan gelombang segitiga dapat diterangkan dengan gambar
2.6. Dengan acuan waktu sampai titik B, pada kondisi awal Vramp = 0 dan keluaran
pembanding . Setelah t = pada kapasitor terjadi pengosongan sehinga Vramp
turun sampai batas , saat Vramp = maka keluaran pembading akan bernilai
. Ini menyebabkan Vramp nilainya naik sampai batas , karena terjadi pengisisan
pada kapasitor. Sehingga menyelesaikan satu siklus lengkap dari gelombang segitiga. sat
V
+ +
0
LT
V VLT
sat
V
sat
V
+
UT
V
Vramp
A B C D
LT
V
sat
V
−
Gambar 2.6. Cara kerja pembangkitan gelombang segitiga.
Tegangan puncak dari gelombang segitiga dirumuskan dengan rasio perbandingan
p antara resistor umpan balik pR ke resistor R dan tegangan saturasi. Diberikan oleh
persamaan 2-8a dan 2-8b.
p V
V sat
UT − −
= (2-8a)
p V
VUT sat
+ −
= (2-8b)
Dengan:
R pR
p= (2-9)
Frekuensi keluaran pembangkit gelombang segitiga ini diberikan oleh persamaan 2-10.
RiC p f
4
= (2-10)
2.6 SPWM (SinusoidalPulse Width Modulation)
SPWM merupakan rangkaian yang menghasilkan variasi pulsa untuk masukan
sinus [2]. Dengan SPWM akan didapatkan nilai duty cycle yang berubah-ubah tergantung
12
gelombang segitiga yang memiliki periode konstan dengan gelombang sinus. Blok
diagram SPWM untuk inverter satu fasa terlihat pada gambar 2.7.
sinus
+
-U3A
OP-11 3
2 1
4
11
SPWM
segitiga
Gambar 2.7. Pembangkit sinyal SPWM.
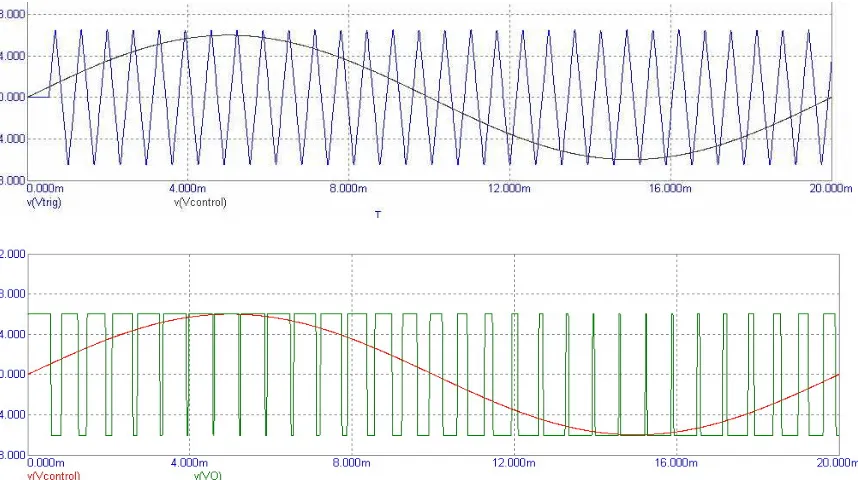
Pada inverter frekuensi dari gelombang segitiga selalu konstan dengan amplitudo
. Gelombang segitiga memiliki frekuensi , yang disebut sebagai frekuensi
pembawa. Sinyal kontrol digunakan untuk memodulasi dan memiliki frekuensi
( juga disebut sebagai frekuensi modulasi), sinyal kontrol ini merupakan gelombang
sinus sebagai frekuensi dasar dari tegangan keluaran inverter. Bentuk gelombang SPWM
dapat dilihat pada gambar 2.8. Keluaran tegangan dari inverter tidak dapat seperti sinus
murni dan pasti memiliki komponen tegangan pada frekuensi harmonis dari . Modulasi
amplitudo memiliki rasio di definisikan sebagai: tri
V fs
contol
V f1
1 f
1 f
a
m
tri control a
V V
m = (2-11)
Dengan adalah tegangan puncak kontrol sinyal, dan adalah amplitudo dari
sinyal segitiga yang selalu konstan. contol
V Vtri
Modulasi frekuensi rasio mf didefinisikan sebagai:
1 f f
Gambar 2.8. Bentuk gelombang SPWM.
Tegangan keluaran Vo terdapat harmonisa dengan tegangan harmonisa
ternormalisasi Voh Vd, yang memiliki amplitudo yang signifikan. Tegangan puncak dari
komponen frekuensi dasar adalah Vd. Maka rata-rata tegangan keluaran Vo dapat
diperoleh dari perbandingan Vcontol dengan Vtri dan Vd:
Vd V
V Vo
tri control ×
= dengan Vcontol ≤Vtri (2-13)
Dalam SPWM, amplitudo dari komponen frekuensi dasar pada tegangan keluaran
yang bervariasi secara linear dengan ma(menghasilkan ma ≤1.0). Hal tersebut
memberikan jangkauan ma dari 0 sampai dengan 1.
Maka:
dengan
Vd m Vo)1 = a ×
( ma ≤1.0 (2-14)
Dengan menaikkan amplitudo dari gelombang sinus menyebabkan nilai
berada diatas 1, sehingga disebut overmodulation, karena tegangan keluaran lebih banyak a
14
mengandung harmonisa jika dibandingkan dengan daerah linear. Gambar 2.9
menunjukkan amplitudo puncak dari frekuensi dasar ternormalisasi sebagai fungsi dari
modulasi amplitudo ma.
Vd Voh
4 π
0 overmodulation
Linear gelombang kotak
0 1 3,24 ma
Gambar 2.9 Kontrol tegangan dengan mengubah nilai ma.
Harmonisa dalam bentuk gelombang tegangan keluaran inverter tampak pada
sideband, yang terpusat pada frekuensi pensaklarannya, dan perkaliannya yaitu berada di
sekitar harmonis , 2 , 3 , dan sebagainya. Amplitudo harmonisa tidak
dipengaruhi oleh . meskipun demikian mengambarkan frekuensi dimana itu
terjadi. Frekuensi dimana tegangan harmonis itu terjadi dapat diketahui dengan: f
m mf mf
f
m mf
(
jm k)
f1fh = f ± (2-15)
Harmonis ke-h harus sesuai dengan ke-k sideband dari j waktu perbandingan modulasi
frekuensi mf
( )
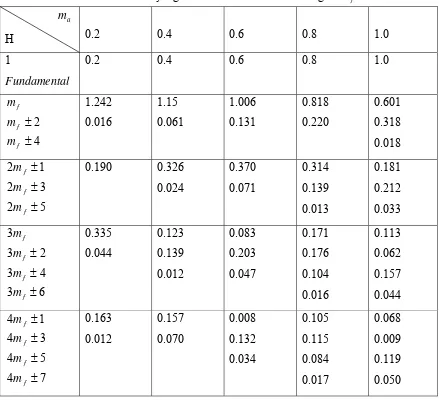
m k jDalam table 2-1, harmonisa yang ternormalisasi Voh Vd menyusun tabel sebagai fungsi
dari modulasi amplitudo , dengan asumsi . Dalam tabel hanya yang memiliki
amplitudo yang penting sampai j = 4. a
m mf ≥9
Tabel 2-1. Harmonisa yang ternormalisasi untuk Vo dengan mf > 21. ma
H 0.2 0.4 0.6 0.8 1.0
1
Fundamental
0.2 0.4 0.6 0.8 1.0
4 2 ± ± f f f m m m 1.242 0.016 1.15 0.061 1.006 0.131 0.818 0.220 0.601 0.318 0.018 5 2 3 2 1 2 ± ± ± f f f m m
m 0.190 0.326
0.024 0.370 0.071 0.314 0.139 0.013 0.181 0.212 0.033 6 3 4 3 2 3 3 ± ± ± f f f f m m m m 0.335 0.044 0.123 0.139 0.012 0.083 0.203 0.047 0.171 0.176 0.104 0.016 0.113 0.062 0.157 0.044 7 4 5 4 3 4 1 4 ± ± ± ± f f f f m m m m 0.163 0.012 0.157 0.070 0.008 0.132 0.034 0.105 0.115 0.084 0.017 0.068 0.009 0.119 0.050
Dari tabel tegangan rms keluaran inverter pada semua nilai h di definisikan dengan:
Vd Vo Vd
Vo h
h = × ×
16
Disubtitusi dengan persamaan 2-11 diperoleh:
Vd Vd m
Vd
Vo a h
h
× ×
×
= ( )
2 1 ) (
h a
h Vd m
Vo ( )
2 1 )
( = × × (2-17)
2.7 Transistor Sebagai Saklar
Simbol dan karakteristik dari BJT (Bipolar Junction Transistor) dapat dilihat pada
gambar 2.10 [2]. BJT memiliki tiga terminal yaitu kolektor, basis dan emitor (gambar
2.10a). BJT diaktifkan dengan memberikan sinyal yang konstan pada basis. BJT memiliki
tegangan bloking pada kondisi off dan arus maju yang besar pada kondisi on (gambar
2.10b). Karena BJT dikendalikan arus, maka arus basis yang besar, dan β transistor yang
besar membuat transistor pada kondisi saturasi (gambar 2.10c). Pada kondisi saturasi
tegangan kolektor-emitor selalu konstan dan arus kolektor didefinisikan sebagai arus
eksternal pada rangkaian kontak.
(a)
Ic Saturasi Linear
Ic
saturasi
Vce
(b) cutoff cutoff Vce
Gambar 2.10. karakteristik BJT. (a) NPN transistor. (b) ideal karakteristik
Transistor memiliki tiga daerah operasi (gambar 2.10c) saturasi, aktif, dan cutoff.
Untuk transistor NPN pada daerah saturasi, arus basis besar sehingga tegangan kolektor
emitor rendah dan transistor bekerja sebagai saklar, sambungan kolektor emitor, dan basis
emitor bias maju gambar 2.11. Pada daerah linear atau aktif transitor bekerja sebagai
penguat dengan arus kolektor dikuatkan sebesar penguatan tertentu. Pada daerah cutoff
(kondisi off) arus basis tidak mencukupi atau sangat rendah dan sambungan basis emitor
bias mundur.
RB
Q1
3
2
1
VCC
RB
RC RC
0V +Vbb
RC
Q1
3
2
1
RC
VCC VCC VCC
Gambar 2.11. Transistor sebagai saklar.
Level saturasi untuk arus kolektor pada rangkaian dapat di definisikan sebagai
berikut:
Rc Vce Vcc
Ic sat
sat
−
= (2-18)
Untuk level saturasi arus basis harus memenuhi kondisi:
dc Ic Ib sat
β
> (2-19)
Nilai resistansi basis maksimal dapat dicari dengan persamaan:
Ib Vbe Vbb
18
Maka:
Ib Vbe Vbb
Rb< − (2-21)
Dengan persamaan-persamaan diatas maka dapat dicari nilai Rb dan Rc yang
sesuai agar transistor dapat berfungsi sebagi saklar.
2.8 Optokopler
Optokopler terdiri dari dua bagian yaitu bagian pengirim cahaya dengan
mengunakan dioda infra merah dan bagian penerima cahaya dengan mengunakan photo
transistor diperlihatkan pada gambar 2.12 [8]. Optokopler dapat diaplikasikan sebagai
sensor dan isolasi antara dua rangkaian. Dioda infra merah dan photo transistor dipasang
saling berhadapan, jika dioda infra merah dialiri arus maka akan menghasilkan cahaya
infra merah. Karena cahaya mengenai bagian basis dari photo transistor menyebakan
photo transistor dapat menghantarkan arus (on). Saat dioda infra merah tidak
memancarkan cahaya atau cahaya yang dihasilkan terhalang, photo transistor off, karena
pada bagian basis tidak mendapatkan cahaya infra merah.
Gambar 2.12. Optokopler.
2.9 Chopper Empat Kuadran
Chopper empat kuadran dengan mengunakan saklar transistor ditunjukkan pada
gambar 2.13 [2]. Dengan beban berupa motor DC dan sumber DC serta kapasitor yang
mempermudah, diasumsikan saklar ideal dan sinyal kendali basis dapat digunakan untuk
menggambarkan tegangan beban.
T4
C
D2
Vo
T1 T2
II
IV
T3
III
D4 D3
D1
Vd
I Ia
A
-+
1 2
Gambar 2.13. Chopper empat kuadran.
2.9.1 Kuadran Satu
Pada kuadran pertama menghasilkan tegangan dan arus keluaran positif. Ini
diperoleh dengan menghidupkan T1 dan T4 secara bersama-sama, seperti terlihat pada
gambar 2.14. menyebakan tegangan beban sama dengan tegangan sumber. Pada kuadran
pertama ini menghasilkan perputaran motor yang searah jarum jam atau forward
motoring.
T4
C
I
T1
Ia
Vd
A
-+
1 2
Vo
20
2.9.2 Kuadran Dua
Kuadran kedua menghasilkan arus positif dengan tegangan negatif yang mengalir
ke beban. Karena T1 dan T4 terhubung dalam waktu tertentu, dan kemudian dimatikan.
Tegangan sumber lebih kecil dari tegangan ggl induksi motor. Arus dalam induktor tetap
mengalir sampai energi di dalamnya habis ke titik 0. karenanya, dioda D2 dan D3
mengambil alih, membuat arus tetap mengalir ke arah yang sama, tetapi tegangan beban
adalah negatif dalam bentuk rangkaian yang baru, seperti pada gambar 2.15.
C
II
D2 Ia
D3 Vd
A
-+
1 2
Vo
Gambar 2.15. Kuadran kedua dengan tegangan beban negatif dan arus positif.
2.9.3 Kuadran Tiga
Pada daerah operasi kuadran ketiga menghasilkan tegangan dan arus negatif pada
beban. Ini diperoleh dengan menghidupkan T2 dan T3 secara bersama-sama, seperti
terlihat pada gambar 2.16. Menyebakan tegangan beban merupakan kebalikan dari
tegangan sumber. Pada kuadran ketiga ini menghasilkan perputaran motor yang
T3 C
III Ia
Vd
T2
A
-+
1 2
Vo
Gambar 2.16. Kuadran ketiga dengan tegangan dan arus beban negatif.
2.9.4 Kuadran Empat
Pada operasi kuadran keempat menghasilkan tegangan positif dan arus negatif
pada beban. T2 dan T3 off dan karena tegangan sumber lebih kecil dari tegangan ggl
induksi motor. Arus dalam induktor tetap mengalir sampai energi di dalamnya habis ke
titik 0. karenanya, dioda D1 dan D4 mengambil alih, membuat arus tetap mengalir ke
arah yang sama, tetapi tegangan beban adalah positif dalam bentuk rangkaian yang baru,
seperti pada gambar 2.17.
D1
C
D4
IV Ia
Vd
A
-+
1 2
Vo
22
2.10 MOSFET
Metal Oxide Semiconductor Field Effect Transistor (MOSFET) merupakan piranti
yang dikendalikan dengan tegangan dan hanya membutuhkan arus masukkan yang kecil
[2]. MOSFET memiliki tiga kaki yaitu source, gate, dan drain. MOSFET memiliki
kecepatan kontak yang tinggi dan waktu kontak dalam orde nano detik. MOSFET dapat
ditemui dalam aplikasi daya rendah dengan konversi frekuensi tinggi.
Ada dua tipe MOSFET yaitu depletion MOSFET dan enhancement MOSFET,
symbol MOSFET ditunjukan pada gambar 2.18. MOSFET memiliki impedansi input
yang tinggi, hingga . MOSFET membutuhkan energi gate yang rendah dan
memiliki switching losses yang rendah. Penguatan arus yaitu perbandingan antara arus
drain dan arus gate rata-rata dalam orde . Transconductance yaitu
perbandingan arus drain dengan tegangan gate, sebagai transfer karakteristik dan
merupakan parameter yang sangat penting.
9
10 1011
D
I IG 109
D
I
S S
n-chanel MOSFET tipe enhancement
D
n-chanel MOSFET tipe depletion
2
1
3
G
D
G
Gambar 2.18. Simbol MOSFET.
Transfer karakteristik dari n-chanel MOSFET tipe enhancement ditunjukan pada
gambar 2.19. Gambar 2.20 menunjukan karakteristik keluaran dari MOSFET tipe
enhancement. MOSFET memiliki tiga daerah operasi:
1. Daerah cutfoff ketika VGS ≤VT.
3. Daerah linear ketika VDS ≤VGS −VT.
Transconductance gm didefinisikan sebagai berikut:
GS D m
V I g
Δ Δ
= dengan VDS = konstan (2-22)
ID
0 VT VGS
Gambar 2.19. Transfer karakteristik dari n-chanel MOSFET tipe enhancement.
Daerah linear daerah saturasi atau pinch off
D
I VGS >VGS4
4
GS
V 3
GS
V
T GS
DS V V
V = −
2
GS
V 1
GS
V
0 VGS =VT VDS
Gambar 2.20. Karakteristik keluaran dari MOSFET tipe enhancement.
Ketika pada daerah linear, arus drain berubah secara proporsional terhadap
tegangan drain source . Pada daerah saturasi arus drain selalu konstan untuk
setiap penigkatan nilai .
D
I
DS
V ID
DS
V
Tanpa sinyal gate, MOSFET memiliki karakteristik sama dengan dioda yang
dihubung berlawanan atau serperti transistor NPN. Gambar 2.21 menunjukkan rangkaian
pensaklaran dengan MOSFET, dengan hambatan sumber sinyal Rs, hambatan
24
I1
RL RS
RG M1
VDD
Gambar 2.21. Rangkaian pensaklaran MOSFET.
Tegangan gate-source VGS dapat ditentukan dengan:
G S
G G GS
R R
V R V
+ ×
= (2-23)
Nilai adalah nilai hambatan dalam pada kendali kaki gate. Maka nilai
diperoleh dengan: S
R RG
GS G
GS G
V V
V R R
− ×
= 3 (2-24)
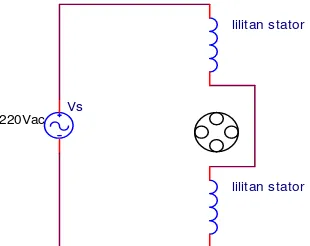
2.11 Motor Induksi Satu Fasa
Motor induksi satu fasa memiliki lilitan stator yang terbagi dalam beberapa celah
sehingga menghasilkan pembagian arus gerak magnetik [1]. Motor ini tidak memiliki
momen putar awal pada saat dihidupkan, tetapi apabila motor ini dihidupkan dengan cara
bantuan, motor akan terus bekerja gambar 2.22.
Vs 220Vac
lilitan stator
lilitan stator
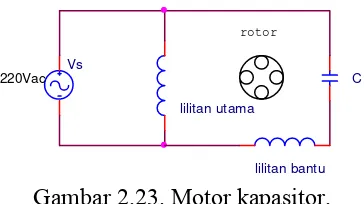
Motor induksi diklasifikasikan menurut metoda bagaimana motor tersebut
dihidupkan dan dinyatakan dengan nama yang menjelaskan metode tersebut. Kapasitor
digunakan untuk memperbaiki penampilan pada saat motor dihidupkan. Pada motor
kapasitor tetap gambar 2.23, kapasitor dan lilitan tambahan tidak diputus setelah motor
hidup. Arus lilitan tambahan dibuat mendahului lilitan utama sebesar 90° listrik.
Sehingga terdapat perbaikan faktor daya dan efisiensi.
Vs 220Vac
lilitan utama
lilitan bantu
rotor
C
Gambar 2.23. Motor kapasitor.
Kecepatan putar motor (n) dalam rpm dipengaruhi oleh frekuensi tegangan yang
masuk ke motor dan jumlah kutub (pole) motor dinyatakan dengan persamaan:
p f
n=120× (2-25)
Besarnya flux dalam stator pada motor induksi diperoleh dari hukum faraday:
dt d N t
v( )=− Φ (2-26)
Dengan tegangan stator adalah v(t)=Vmsinωt, sehingga:
∫
∫
==
Φ V tdt
N dt t v N
t m
p p
ω
sin 1
) ( 1 ) (
t N
V t
p
m ω
ω cos
) ( =−
Φ (2-27)
Jika frekuensi masukan stator diturunkan sebesar 10 persen dengan tegangan
26
diinduksikan flux magnet pada motor juga ikut meningkat. Pada daerah bukan saturasi,
kenaikan pada arus medan magnetnya juga akan 10 persen. Dalam daerah saturasi dari
medan magnet motor, kenaikan flux sebesar 10 persen memerlukan kenaikan lebih
banyak pada arus medan magnetnya. Pada motor induksi perubahan tegangan ±10%
menyebabkan perubahan kecil pada putaran motor.
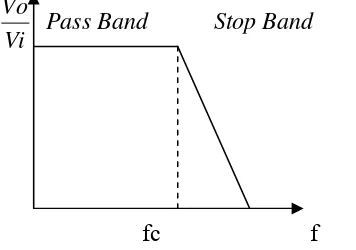
2.12 Penapis Aktif Lolos Rendah
Sebuah penapis lolos rendah akan melewatkan sinyal-sinyal yang masuk hanya
dengan sedikit, bahkan tidak ada pelemahan hingga frekuensi sinyal tertentu (frekuensi
cutoff), diatas frekuensi ini penapis akan menahan sinyal-sinyal masukan[3]. Kurva
umum karakteristik penapis lolos rendah ditunjukkan pada gambar 2.24
Vi Vo
Pass Band Stop Band
fc f
Gambar 2.24. Kurva umum karakteristik penapis lolos rendah.
Rangkaian penapis lolos rendah VCVS (Voltage Controlled Voltage Source)
ditunjukkan pada gambar 2.25. frekuensi cutoff ditentukan dengan persamaan:
2 1 4 3 2
1 )
( 2
1
C C R R fc
π
VCC
+
-Op1 3
2
6
7
4
C4 v in
VEE
v o R1
C3
R2
Gambar 2.25. Rangkaian penapis VCVS.
Dengan penguatan passband adalah 1 dan R1 =R2 maka C3 =2C4, dengan
konfigurasi pengikut tegangan. Untuk frekuensi cutoff 1radian/detik diperoleh nilai-nilai
komponen sebagai berikut:
F C
F C
R R
707 , 0
414 , 1
1
4 3
2 1
= =
Ω = =
2.13 Multivibrator Astabil.
Multivibrator astabil adalah multivibrator yang tidak mempunyai keadaan stabil.
Multivibrator akan berada pada salah satu keadaan selama sesaat dan kemudian
berpindah ke keadaan lain selama sesaat pula[5]. Multivibrator astabil dapat dibangun
28
U11 NE555 2
5
3
7
6
4
TR
CV
Q
DIS
THR
R
VCC
4.7uF
C
Ra 10k
(A)
kotak
Rb POT
1
3
2
Gambar 2.26. Rangkaian multivibrator dengan IC 555.
Membangun multivibrator astabil dapat dilakukan dengan menggunakan IC
pewaktu 555. Cara kerja pewaktu ini ditentukan oleh resistor dan kapasitor yang
dihubungkan ke IC tersebut. Gambar 2.26 menunjukkan rangkaian multivibrator astabil.
Pada saat pengisian kapasitor dari Vcc, arus lewat Ra dan Rb. Waktu pengisianya adalah:
693Ttinggi =τ1×ln2= RAC×0. (2-29)
Sedangkan saat pengosongan kapasitor arus akan melewati Rb ke pin pengosongan
(discharge), sehingga waktu pengosongan kapasitor adalah:
693Trendah =τ2 ×ln2=RBC×0. (2-30)
Dan duty cycle diperoleh dengan persamaan:
% 100
2 ×
+ + =
b a
b a
R R
R R δ
2.14 D Flip-Flop
Satu variasi rangkaian RS Flip-flop yang berguna adalah Data latch, atau D
flip-flop, keluarannya mengikuti masukan pada saat clk (clock) tinggi[5]. Seperti yang
ditunjukkan pada diagram logika pada gambar 2.27.
Gambar 2.27. Rangkaian D flip-flop.
Pada D Flip-flop, jika input CLK berlogika 1, output Q akan selalu mengeluarkan
logika sesuai input dari D, tidak mempedulikan perubahannya. Ketika input CLK jatuh ke
logika 0, kondisi terakhir dari input D disimpan pada Flip-flop, untuk digunakan
rangkaian lain yang membutuhkan sinyal ini. Tabel kebenaran dari D flip-flop ini dapat
dilihat pada tabel 2.2.
Tabel 2.2. Tabel kebenaran D flip-flop.
D CLK Q
0 0 0
0 1 Keadaan terakhir
1 0 0
30
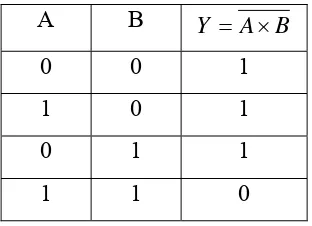
2.15 Gerbang Logika NAND
Merupakan gerbang kombinasi yang sama dengan gerbang logika dasar AND,
tetapi pada bagian keluarannya dibalik dengan gerbang logika inverter (NOT)[5]. Gambar
2.28 menunjukan rangkaian logika dan tabel kebenaran gerbang NAND.
Dari gambar 2.28 dapat dijelaskan operasi dari gerbang logika NAND. Dengan
mengubah-ubah keadaan masukannya pada keadaan 0 (rendah) atau pada keadaan 1
(tinggi), dapat diketahui perubahan pada bagian keluarannya. Jika kedua masukan berupa
keadaan 0, maka keluaran akan 1. Dan jika diinginkan keluaran 1, maka salah satu
masukan harus 0. Jika salah satu masukanya 1, maka keluaran akan 1, tetapi jika kedua
masukanya 1, maka keluarannya akan 0. Tabel 2.3 menunjukan tabel kebenaran gerbang
logika NAND.
Y
NAND2 1 2
3
A B
Gambar 2.28. Rangkaian logika gerbang logika NAND.
Tabel 2.3. Tabel kebenaran gerbang logika NAND.
A B Y = A×B
0 0 1
1 0 1
0 1 1
2.16 Pencacah Dekade
Pencacah dekade mencacah dari 0000 sampai dengan 1001 atau dalam desimal 0
sampai dengan 9[5]. Pencacah dekade dibangun dari empat flip-flop ditunjukkan pada
gambar 2.29. Dengan masukan gelombang segiempat (clock) pada flop A, maka
flip-flop A akan aktif tinggi pada tepian rendah gelombang masukanya. Keluaran tepian
rendah flip-flop A digunakan untuk membuat aktif tinggi flip-flop B. Keluaran tepian
rendah flip-flop B selanjutnya digunakan untuk membuat aktif tinggi flip-flop C. Dan
keluaran tepian rendah flip-flop C digunakan untuk membuat aktif tinggi flip-flop D. Saat
kondisi keluaran DCBA = 1010 maka semua flip-flop di reset, dengan memberikan
logika rendah pada masukan-masukan CLR (clear).
AND2 JKFF
J
CLK
K
CL
RN
P
R
N
Q
clock
B
JKFF
J
CLK
K
CL
RN
P
R
N
Q C
A D
VCC
JKFF
J
CLK
K
CL
RN
P
R
N
Q
JKFF
J
CLK
K
CL
RN
P
R
N
Q
(a)
Clock
A
B
C
D
(b)
32
Untuk memperjelas diagram waktu pada gambar 2.28 dapat dilihat tabel
kebenaran dari pencacah dekade pada tabel 2.4.
Tabel 2.4. Tabel kebenaran Pencacah dekade.
Clock ke- D C B A Cacahan
0 0 0 0 0 0
1 0 0 0 1 1
2 0 0 1 0 2
3 0 0 1 1 3
4 0 1 0 0 4
5 0 1 0 1 5
6 0 1 1 0 6
7 0 1 1 1 7
8 1 0 0 0 8
9 1 0 0 1 9
10 0 0 0 0 0
2.17 Dekoder
Dekoder merupakan suatua piranti yang dapat mengubah suatau sistem bilangan
biner yang terdapat pada masukan, menjadi sistem bilangan yang lainnya yang terdapat
pada bagian keluaranya[5].
Dekoder berfungsi sebagai pengubah kode dari BCD (Binary code decimal) ke
kode 7-segmen LED gambar 2.30. Dengan masukan BCD maka pada tujuh-segmen led
akan menampilkan angka-angka desimal. Gambar 2.25 menunjukkan kode BCD 0101
pada input dekoder akan mengaktifkan output a, c, d, f, dan g sehingga pada pada
0 1 0
1 Dekoder
BAB III
PERANCANGAN
Konverter DC ke AC dikenal sebagai inverter. Fungsi dari inverter adalah untuk
mengubah tegangan masukan DC menjadi tegangan keluaran AC dengan amplitudo dan
frekuensi tertentu. Blok diagram voltage source inverter ditunjukan pada gambar 3.1.
Tegangan jala-jala dari PLN disearahkan untuk mendapatkan tegangan DC. Karena
keluaran penyearah ini masih memiliki ripple, maka digunakan tapis kapasitor untuk
mengurangi faktor ripple tegangan keluaran. Gelombang segitiga dibandingkan dengan
gelombang sinus, hasil perbandingan tersebut merupakan sinyal SPWM. Frekuensi
gelombang sinus merupakan frekuensi dasar dari inverter dan ditampilkan dengan
mengunakan dua buah 7-segmen LED untuk mempermudah pengamatan frekuensi kerja
dari inverter. Putaran motor AC ditampilkan dengan menggunakan tiga buah 7-segmen
LED, sehingga mempermudah pengamatan kecepatan putaran motor AC.
SPWM digunakan untuk mengendalikan inverter 1 fasa dengan beban motor AC.
Inverter yang dirancang dapat digunakan untuk motor induksi dengan tegangan kerja
220V dan arus maksimum yang diijinkan 2A.
PLN
Penyearah dan Tapis
kapasitor
Chopper
Driver
SPWM
Pembangkit Gelombang
Sinus
Tampilan Frekuensi Pembangkit
Gelombang Segitiga
Motor Induksi
Tampilan Kecepatan
Gambar 3.1. Blok diagram voltage source inverter.
3.1 Penyearah
Untuk mendapatkan tegangan DC, dari sumber AC maka dibutuhkan penyearah,
penyearah yang dibuat mengunakan penyearah takterkontrol. Rangkaian ini
menggunakan metode dioda jembatan, seperti terlihat pada gambar 3.2. Tipe dioda
jembatan yang dipakai adalah 35MB60A dengan (Maximum Peak Reverse
Voltage) sebesar 600V.
RRM
V
D3 DIODE
D2 DIODE
0 D4
DIODE D1
DIODE
Vdc
0 Vs
220Vac
36
Dengan tegangan keluaran dari inverter 220V dan ma =1, maka nilai tegangan DC (Vd)
dapat diperoleh dengan persamaan 2-17:
⎟ ⎠ ⎞ ⎜ ⎝ ⎛ × = × × = × × = 1 1 1 1 ) ( 2 1 ) ( ) ( 2 1 ) ( ) ( 2 1 ) ( a a h a h m Vo Vd m Vd Vo m Vd Vo V
Vd 311,127
1 2 1 220 = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ × =
Dengan Vfm tegangan maju maksimal pada dioda sebesar 1,2Volt (dari data sheet) maka :
V Vd =311,127+1,2=312,327
Besarnya tegangan masukan dapat dihitung dengan persamaan (2-1), dengan = Vd
yaitu : m V V Vd V V V rms rms m 85 , 220 2 327 , 312 2 2 = = = × =
Nilai tegangan tersebut mendekati nilai tegangan dari PLN yang memiliki tegangan
3.2 Tapis Kapasitor
Karena keluaran dari penyerah masih memiliki ripple maka digunakan tapis
kapasitor, penapisan dilakukan dengan menghubung paralel kapasitor dengan beban.
Kapasitor akan memperlama arus yang mengalir ke beban sehingga mengurangi ripple
pada tegangan keluaran (gambar 2.3).
0 Vd
Ce Vdc
0
Gambar 3.3. Tapis kapasitor.
Dengan resistansi beban sebesar 50Ω dan induktansi sebesar 121,7mH, serta
frekuensi suplai sumber penyearah sebesar 50Hz maka besarnya yang dipakai dapat
diselesaikan dengan persamaan (2-6).
e
C
Dengan nilai n = 2:
e
C L
R
ω ω
2 10 )
2
( 2
2 + =
(
)
22 4
4
10
fL R
f Ce
π
π +
=
(
)
uFCe 174,202
1217 . 0 50 4 50 50 4
10
2
2 + × × =
× =
π π
Maka kapasitor yang dipakai harus lebih besar dari 174,202uF dan pada rangkaian
dipakai nilai kapasitor sebesar 940uF/450V. Dengan menggunakan 2 buah kapasitor
38
3.3 Pembangkit Gelombang Sinus
Gelombang sinus dibangkitkan oleh XR-2206 yang merupakan sebuah generator
fungsi. Rangkaian pembangkit gelombang sinus seperti terlihat pada gambar 3.5.
frekuensi kerja XR-2206 dapat dipilih diantara rentang 0.01Hz sampai dengan 1MHz.
Nilai resistor pewaktu dapat diperoleh menggunkan persamaan 2-7:
RC f = 1
Dengan frekuensi keluaran yang diinginkan dari 15Hz sampai dengan 50Hz, dan
dipilih C sebesar 470nF, maka:
Ω ≈
Ω =
× × =
= − k
C f
R 141944 142
10 470 15
1 1
9 min
max
Ω ≈ Ω =
× × =
= − k
C f
R 42553 42
10 470 50
1 1
9 max
min
Dari hasil perhitungan diketahui bahwa besarnya nilai R maksimum adalah
142kΩ, sehingga dibutuhkan potensiometer senilai 100kΩ untuk mengatur nilai frekuensi
keluaran yang dihubungkan seri dengan resistor 42kΩ untuk membatasi frekuensi
maksimal sebesar 50Hz. Dengan keluaran sinus mendekati 60mV/kΩ dan nilai amplitudo
maksimum sebesar 6V maka dibutuhkan R3 sebesar :
Ω =
×
= − k
R 100
10 60
6
3 3
Rangkaian pembangkit gelombang sinus seperti terlihat pada gambar 3.5.
keluaran gelombang sinus dihubungkan dengan buffer sebagai penyangga agar tegangan
AMSI VCC R3 5.1K R1 42K TR2 C3 1uF SYMA2 C1 470nF SYMA1 100K POT 1 3 2 WAVEA2 VCC WAVEA1 GND SYNCO VEE STO BIAS sinus FSKI VCC + -Op1 3 2 6 7 4
XR-2206
MO R3 5.1K 100K POT 1 3 2 Vcc R5 10K R6 200 C5 10uF Pengatur frekuensi. TC1 C4 1uF TC2 TR1Gambar 3.4. Pembangkit gelombang sinus menggunakan XR-2206.
3.4 Pembangkit Gelombang Segitiga
Rangkaian pembangkit gelombang segitiga ditunjukkan pada gambar 3.6.
Tegangan puncak dari gelombang segitiga dirumuskan dengan rasio p antara resistor
umpan balik pR ke resistor R dengan tegangan saturasi. Frekuensi gelombang segitiga
yang dibangkitkan diperoleh melalui persamaan 2-12 dan tegangan puncak diperoleh
dengan persamaan 2-11. Dengan yang diinginkan adalah 1 dan tegangan puncak
gelombang sinus adalah 6V maka besarnya nilai tegangan puncak gelombang segitiga
40
Nilai rasio p antara resistor umpan balik pR ke resistor R diperoleh dengan
persamaan 2-9: 67 , 1 6 10 = − − = − − = V V V p UT sat
Dengan R = 12kΩ maka pR:
R pR p= Ω = × = ×
= p R 1,67 103 20040
pR
Diperoleh pR = 20kΩ
Ω = × + × × × × = + × = 7500 ) 10 2 , 1 ( ) 10 2 ( ) 10 2 , 1 ( ) 10 2 ( 4 4 4 4 R pR R pR Rc
Sehingga besarnya Rc yang dipakai 6,8kΩ
Dengan yang diinginkan adalah 40 dan frekuensi maksimal gelombang sinus adalah
50Hz. Maka nilai frekuensi gelombang segitiga dapat diperoleh dengan persamaan 2-12: f m Hz f m f f f m f s s f 2000 50 40 1 1 = × = × = =
Dengan f = 2000Hz dan C yang dipilih = 100nF
RiC p f 4 = Ω = × × =
= − 2087,5
10 2000 4 67 , 1
4fC 8
p Ri
segitiga +
-3
2
6
7
4
VEE
+
-3
2 6
7
4
VEE VCC R
VCC
Ri pR
C1
Rc
Gambar 3.5. Pembangkit gelombang segitiga.
3.5 SPWM
Dengan SPWM akan didapatkan nilai duty cycle yang berubah-ubah tergantung
nilai amplitudo sinusnya. SPWM ini membandingkan gelombang segitiga yang memiliki
periode konstan dengan gelombang sinus yang dapat diatur frekuensinya. Untuk
pembanding dan pendeteksi perpotongan dengan nol pada SPWM ini dengan
mengunakan OpAmp. Rangkaian SPWM ditunjukkan pada gambar 3.6.
Gelombang sinus sebagai referensi dihasilkan dari generator gelombang sinus
XR2206. Gelombang segitiga sebagai gelombang pembawa dibandingkan dengan
gelombang sinus sebagai referensi. Menghasilkan setengah periode inverter pada
pembanding OpAmp-1 dan setengah periode berikutnya diperoleh dari pembanding
OpAmp-3. OpAmp-2 digunakan sebagai pendeteksi perpotongan dengan 0 (nol), sebagai
kontrol frekuensi keluaran setengah periode pertama. Dan untuk setengah periode
berikutnya dengan OpAmp-4. Untuk kontrol periode keluaran digunakan saklar analog
menggunakan transistor. Untuk setengah periode pertama S1, dan untuk setengah periode
42
S2 +
-Op2 3
2 6
7
4
VEE +
-Op1 3
2 6
7
4
VEE
D4 VCC
S2+ sinus
R2
R1 R1
Q2 S1
D3
VCC D1
segitiga
VEE
S1+
VEE
D2
+
-Op4 3
2
6
7
4
VCC
Q1
VCC
+
-Op3 3
2
6
7
4
Q1
VCC
R2 Q2
VCC
Gambar 3.6. Rangkaian SPWM.
Untuk menentukan hambatan pada kaki emitor (R1), maka perlu diketahui arus
kolektor maksimum, dengan Ic =20 mA dan tegangan masukan sebesar +Vsat =10V
emitor , tegangan maju dioda Vd = 1V dan tegangan infra merah
sehingga:
V
Vbe =1,3 VL =1,7V
(
)
(
)
(
)
= Ω × + − − − = + − − − = − − − = − 280 10 20 ) 7 , 1 4 , 0 ( 3 , 1 1 10 1 ) ( 1 1 3 R I Vl Vce V Vd V R I Vee V Vd V R c sat be sat c be satDan nilai R1 yang dipakai sebesar 330Ω
Untuk menentukan hambatan pada kaki basis (R2) saat transistor Q2 pada kondisi
saturasi, arus kolektor maksimum sebesar Ic = 20 mA dan tegangan masukan sebesar
sedangkan Vbe = 1,3V dan V
Vsat =10
+ βdc =100sehingga;
(
)
(
)
(
)
= Ω × − = − = − = − 43500 100 10 20 3 , 1 10 2 2 2 3 R I Vbe Vcc R I Vbe Vcc R DC c b βNilai R2 harus kurang dari 43500Ω agar transistor dapat saturasi, dan nilai hambatan
yang dipakai sebesar 10kΩ
3.6 Kendali Kaki Gate
Rangkaian kendali pada kaki gate ini berfungsi sebagai isolasi antara kendali gate
pada tingkat rendah dengan tingkat tinggi pada rangakaian inverter, serta sebagai kendali
chopper. Rangkaian kendali kaki gate terdiri dari bagian optokopler dan penguat.
44
Untuk menentukan hambatan pada kaki emitor (R1) pada photo transistor , arus
kolektor maksimum Ic = 5mA denga Ie ≈ Ic, tegangan basis emitor Vbe = 1,4V tegangan
masukan sebesar S+ = 10 Volt sehingga;
(
)
(
)
= Ω× − =
− + =
− 1720
10 5
4 , 1 10 1 1
3 R
I V Vs R
e be
Besarnya nilai R1 yang dipakai sebesar 2kΩ
Untuk menentukan hambatan pada kaki kolektor (R2) saat transistor Q2 pada
kondisi saturasi, diinginkan arus kolektor maksimum sebesar Ic = 10 mA dan tegangan
masukan sebesar Vcc = 10 Volt sedangkan Vce = 0,4V saat transistor pada kondisi
saturasi sehingga;
(
)
(
)
= Ω× − =
− =
− 960
10 10
4 , 0 10 2 2
3 R
I Vce Vcc R
c
R1 2k G2 R2 1k S2 R3 1k GND4 R1 2k R3 1k Gnd2 Q3 R2 1k Vcc2 Q2 3 2 1 Gnd1 G1 1 2 5 4 Q2 3 2 1 Gnd4 R1 2k Vcc1 1 2 5 4 G4 GND2 GND1 Vcc4 Q3 R2 1k R3 1k G3 Gnd3 GND3 Q2 3 2 1 R2 1k Q2 3 2 1 R3 1k R1 2k 1 2 5 4 S2+ S1+ 1 2 5 4 Vcc3 Q3 Q3 S1
Gambar 3.7. Rangkaian kendali kaki gate.
Untuk menentukan hambatan pada kaki kolektor (R3) saat transistor Q3 pada
46
masukan sebesar Vcc = 10 Volt sedangkan Vce = 0,4V saat transistor pada kondisi
saturasi sehingga;
(
)
(
)
= Ω× − =
− =
− 480
10 20
4 , 0 10 3 3
3 R
I Vce Vcc R
c
Besarnya nilai R3 yang dipakai sebesar 1kΩ
3.7 Chopper
Chopper dapat digunakan sebagai inverter satu fasa karena memiliki kemampuan
untuk bekerja dalam semua kuadran. Chopper empat kuadran pada gambar 3.8
dihubungkan dengan motor AC sebagai beban. Pada satu siklus gelombang, setengah
periode M1 dan M4 on sesuai dengan sinyal yang masuk kaki gate. Dan untuk setengah
periode berikutnya M2 dan M3 on.
Nilai tegangan gate-source yang diinginkan VGS =9,9V, maka besarnya nilai
hambatan gate-source RG, diperoleh dengan persamaan 2-24.
Ω =
− × =
− × =
99000 9
, 9 10
9 , 9 1000
3
G
GS G
GS G
R
V V
V R R
Vd
RG1 100K
Gnd3
F1 FUSE
MG1
MOTOR AC
1 2
Gnd1
D1 D1N4007
F5
FUSE
Gnd2
G1 G2
M3
2SK2611 M1
2SK2611
M2
2SK2611
RG4 100K
F4 FUSE F2
FUSE
G4
M4
2SK2611 D3
D1N4007 F3
FUSE
0
RG2 100K
D2 D1N4007
D4 D1N4007 RG3
100K G3
Gnd4
Gambar 3.8. Chopper empat kuadran.
Tipe MOSFET yang dipakai 2SK2611 yang memiliki tegangan Drain to source
, arus drain , sehingga dapat digunakan pada rangkaian ini yang
memiliki tegangan masukan dc sebesar 312,327V. V
VDSS =900 ID =9A
3.8 Motor AC
Motor AC satu fasa digunakan sebagai beban dari chooper dengan tegangan
keluaran tetap dan frekuensi yang dapat di atur. Dengan pengaturan frekuensi maka
putaran motor juga akan berubah. Hubungan antara frekuensi dengan kecepatan dapat
48
p f n=120×
Dengan jumlah pole pada motor adalah 2 dan frekuensi chooper dari 15Hz sampai
dengan 50Hz.
Tabel 3.1 hubungan frekuensi dan kecepatan
Jumlah pole Frekuensi (Hz) Kecepatan (rpm)
2 15 900
2 16 960
2 17 1020
2 18 1080
2 19 1140
2 20 1200
2 21 1260
2 22 1320
2 23 1380
2 24 1440
2 25 1500
2 26 1560
2 27 1620
2 28 1680
2 29 1740
2 30 1800
2 31 1860
2 32 1920
2 33 1980
2 34 2040
2 35 2100
2 36 2160
2 37 2220
2 38 2280
2 39 2340
2 40 2400
2 41 2460
2 42 2520
2 43 2580
2 44 2640
2 45 2700
2 46 2760
2 47 2820
2 48 2880
2 49 2940
3.9 Pewaktu
Sistem ini menggunakan tiga buah pewaktu yaitu pewaktu untuk membangkitkan
pulsa 1 detik, pewaktu untuk mereset pencacah dan pewaktu untuk mengaktifkan dekoder
7-segmen LED. Pewaktu yang digunakan untuk membangkitkan pulsa satu detik adalah
IC NE555 yang dirancang untuk menghasilkan gelombang kotak. Disamping untuk
membangkitkan pulsa satu detik, pewaku ini juga digunakan untuk penyulut kedua
pewaktu yang lainnya. Nilai resistor pewaktu dapat diperoleh dengan persamaan 2-27.
Dengan C = 1uF, Ra = 10K Ω dan T = 1 maka:
Ω = × × × × − = × − = + = − − 716500 10 2 693 , 0 ) 10 10000 693 , 0 ( 1 2 693 , 0 ) 693 , 0 ( ) 2 ( 693 , 0 6 6 Rb C C R T R C R R T a b b a
Digunakan potensiometer sebesar 1MΩ.
Besarnya duty cycle keluaran diperoleh lewat persamaan 2-29.
% 34 , 50 % 100 10 . 7165 2 10 10 . 7165 10 % 100 2 2 4 2 4 = × × + + = × + + = δ δ b a b a R R R R
Sedangkan pewaktu untuk me-reset pencacah dekade dan pewaktu untuk
mengaktifkan dekoder 7 segmen menggunakan gerbang NAND, kapasitor dan resistor.
Rangkaian RC digunakan untuk menghasilkan pulsa sempit dengan tetapan waktu:
C R
50
Dengan waktu yang diinginkan adalah 0,0001 detik dan nilai C ditetapkan 10nF maka
nilai R diperoleh:
Ω =
× =
= − 10000
10 10 0001 , 0