MIKROKONTROLER ATtiny2313
TUGAS AKHIR
Diajukan untuk Memenuhi Salah Satu Syarat
Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
Disusun oleh :
Fransiskus Xaverius Ari Bandioko
NIM : 025114019
PROGRAM STUDI TEKNIK ELEKTRO
JURUSAN TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
2007
FINAL PROJECT
Presented as Partial Fulfillment of the Requirements
to Obtain Sarjana Teknik Degree
in Electrical Engineering
by:
Fransiskus Xaverius Ari Bandioko
Student number : 025114019
ELECTRICAL ENGINEERING STUDY PROGRAM
DEPARTMENT OF ELECTRICAL ENGINEERING
FACULTY OF SCIENCE AND TECHNOLOGY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
2007
SWR METER
DAN
POWER METER
DIGITAL
BERBASIS
MIKROKONTROLER ATTINY2313
disusun oleh
Fransiskus Xaverius Ari Bandioko
NIM : 025114019
Telah disetujui oleh :
Pembimbing I
A. Bayu Primawan, S.T., M.Eng.
Tanggal : 29 Januari 2008
Pembimbing II
Alexius Rukmono, S.T.
Tanggal : 28 Januari 2008
SWR METER
DAN
POWER METER
DIGITAL
BERBASIS MIKROKONTROLER ATTINY2313
Dipersiapkan dan ditulis oleh:
Fransiskus Xaverius Ari Bandioko
NIM : 025114019
Telah dipertahankan dihadapan penguji
Pada tanggal : 5 Nopember 2007
dan dinyatakan memenuhi syarat
Susunan panitia penguji :
Ketua
: Martanto, S.T., M.T.
……….
Sekretaris
: A. Bayu Primawan, S.T.,M.Eng.
……….
Anggota : Ir. Th. Prima Ari Setyani, M.T.
……….
Anggota : Alexius Rukmono, S.T.
………...
Yogyakarta, 27 November 2007
Dekan Fakultas Sains dan Teknologi
Universitas Sanata Dharma
Yogyakarta
Dekan
Ir. Gregorius Heliarko, S.J., S.S.,BST., M.A., M.Sc.
yang pernah diajukan untuk memperoleh gelar kesarjanaan di suatu Perguruan
Tinggi, dan sepanjang sepengetahuan saya juga tidak terdapat karya atau pendapat
yang pernah ditulis atau diterbitkan oleh orang lain, kecuali yang secara tertulis
diacu dalam naskah ini dan disebutkan dalam daftar pustaka.
Yogyakarta, 27 Nopember 2007
Penulis
Fransiskus Xaverius Ari Bandioko
opportunity, but an optimist sees an
opportunity in every difficult”
(Sir Winston Churchill)
Dengan segala puji dan syukur ke hadirat Allah Bapa, Allah Putra, dan
Allah Roh Kudus, penulis persembahkan karya ini kepada:
•
Iesu Christe,sebagai pedoman hidup,ampuni hamba-Mu ini
•
Ayah dan ibuku tercinta, kasih dan cinta kalian tak akan pernah
tergantikan oleh apapun
•
Mbak Novin, Mas Iwan dan Nadine serta adikku Hendrikus Deka
Pranajaya, terima kasih telah menjadi sumber semangat hidupku.
•
Seseorang yang pernah singgah di hati, terima kasih atas kasih
sayang dan dukungan dalam mengerjakan tugas akhir ini
•
My Big Family in TEKSAPALA,...”Per Aspera Ad Astra”
•
Almamater Universitas Sanata Dharma
SWR meter dan Power meter digital berbasis mikrokontroler ATTiny2313
merupakan sebuah alat yang dirancang untuk mengukur besamya gelombang
tegak antara daya pancar dan daya balik pada sebuah pemancar FM dengan daya
pancar maksimal 10 Watt. Alat ukur ini dirancang menggunakan dioda IN60
germanium sebagai pendeteksi dan penyearah tegangan pada blok SWR,
rangkaian pengkonversi tegangan ke frekuensi, mikrokontroler ATTiny2313, dan
LCD.
Pengambilan data SWR dan Power awal diakukan dengan mengkalibrasi
alat ukur yang dirancang dengan alat ukur acuan yaitu SWR dan Power Meter
SX-2000 Diamond Antena. Dari hasil pengujian dan analisa,
analog interface
dapat
menghasilkan pengukuran SWR dengan tingkat kesalahan pengukuran
.
1,1 % dan
rata-rata deviasi
.
0,01 pada level tegangan 0,1 volt - 0,375 volt untuk titik maju
(forward)
dan 0,002 volt - 0,016 volt untuk titik balik
(reverse)
. Sedangkan
pengukuran SWR secara digital menghasilkan pengukuran dengan tingkat
kesalahan
.
0,647 % dan rata-rata deviasi
.
0,007 serta rata-rata tingkat ketelitian
.
99,15 %.
Rangkaian pengkonversi tegangan ke frekuensi tidak dapat menghasilkan
frekuensi keluaran yang linier, sehingga untuk input frekuensi ke mikrokontroler
digunakan AFG (sebagai pembangkit frekuensi). Program penghitungan SWR
pada mikrokontroler dapat bekerja dengan baik. Mikrokontroler dapat mendeteksi
frekuensi masukan, mengolah, dan menampilkan hasilnya pada penampil LCD.
Kata kunci:
forward
,
reverse
, gelombang tegak, power
.measuring instrument that is designed to measure standing wave between forward
power and reverse power at FM transmitter with maximum power 10 Watt. This
measuring instrument is designed using diode IN60 germanium as a detector and
voltage rectifier at SWR block, voltage to frequency converter circuit,
microcontroller ATTiny2313 and LCD.
First early intake of SWR and Power meter data is doing by calibrating
between the measuring instrument that is designed with SWR and Power Meter
SX-200 Diamond Antenna – as the reference measuring instrument. From the
result of testing and analyse, analog interface produces SWR measurement with
error level
.
1,1 %
and deviation average value
.
0,01 at voltage level 0,1 volt to
0,375 volt for forward point and 0,002 volt to 0,016 volt for reverse point.
Meanwhile, SWR measurement digitally produces value with error level
.
0,647%
and deviation average value
.
0,007 and also accuracy average level
.
99,15 %.
Voltage to frequency converter circuit cannot produces linear frequency.
So, AFG – as frequency generator – needed to input frequency onto
microcontroller. SWR computation program at microcontroller can working
properly. Microcontroller can detect frequency input, processing that frequency
input, and then display the result at displayer (LCD)
Keywords : forward, reverse, standing wave, power.
kasih karunia-Nya sehingga penulis dapat menyelesaikan tugas akhir yang
berjudul “SWR Meter dan Power Meter Digital berbasis Mikrokontroler
ATTiny2313.”
Tugas akhir ini disusun sebagai salah satu syarat untuk memperoleh gelar
Sarjana Teknik Elektro di Fakultas Sains dan Teknologi Universitas Sanata
Dharma sekaligus sebagai upaya untuk memperdalam dan memperkaya wawasan
berpikir serta menambah wacana di bidang elektronika khususnya dan sains
teknologi pada umumnya.
Pembuatan tugas akhir ini tidak terlepas dari bantuan dan bimbingan
berbagai pihak, untuk itu penulis ingin mengucapkan terima kasih kepada :
1.
Ir. Gregorius Heliarko, S.J., S.S., BST., M.A., M.Sc selaku Dekan
Fakultas Sains dan Teknologi Universitas Sanata Dharma atas segala
dukungan berupa kritik dan saran demi pengerjaan skripsi ini.
2.
A. Bayu Primawan, S.T., M.Eng selaku Kepala Jurusan Teknik Elektro
dan pembimbing I yang telah memberikan bimbingan, masukan, waktu,
dan perhatiannya selama penyusunan tugas akhir ini.
3.
Alexius Rukmono, S.T selaku dosen pembimbing II yang juga telah
memberikan bimbingan, masukan, waktu, dan perhatiannya selama
penyusunan tugas akhir ini.
4.
Martanto, S.T., M.T selaku Ketua Tim Penguji yang telah memberikan
banyak bantuan sehingga tugas akhir ini dapat semakin baik.
6.
Segenap dosen dan laboran Teknik Elektro Universitas Sanata Dharma.
7.
Segenap karyawan sekretariat Fakultas Sains dan Teknologi.
8.
Ayah dan ibu tercinta: Bapak Ignatius Parmuji dan Ibu Lucia Sri
Damayanti.
9.
Mbak Novin, mas Iwan dan Nadine, adikku Hendrikus Deka Pranajaya
atas kasih sayang, doa, dukungan dan perhatian.
10.
Seseorang yang pernah mengisi dihatiku, neng Lava, mau menemani
dalam suka dan duka, terima kasih atas kebersamaan, dukungan, cinta,
perhatian, dan kesabaran yang pernah engkau berikan selama ini.
11.
Saudara-saudaraku di TEKSAPALA atas semangatnya “
keep forward
whatever it takes
” dan semoga kita dapat lebih berkembang bersama.
12.
Teman-teman TE angkatan 2002 terimakasih atas dukungan dan
kekompakannya.
13.
Keluarga besar DKD’s Crew, terima kasih atas tumpangannya.
14.
Mas Gede, Mas Bowo, Mas Ucup, Robby, Andre Bhule, Andre PK, dan
Andre Krupuk, terima kasih atas bantuan dan semangat yang kalian
tularkan.
15.
Keluarga besar Sidomulyo (Tutik, mas Bowo, de’ Eta, mbak Nia).
16.
Semua pihak yang telah membantu dan tidak dapat disebutkan satu per
satu sehingga skripsi ini dapat diselesaiknan.
membangun dari pembaca sangat diharapkan. Akhirnya penulis berharap semoga
tugas akhir ini dapat bermanfaat bagi pembaca khususnya dan dunia elektronika
umumnya.
Yogyakarta, 27 Nopember2007
Penulis
Fransiskus Xaverius Ari Bandioko
Halaman ... i
Halaman Judul dalam Bahasa Inggris ... ii
Lembar Pengesahan oleh Pembimbing ... iii
Lembar Pengesahan oleh Penguji ... iv
Lembar Pernyataan keaslian karya... v
Lembar Pernyataan publikasi... vi
Halaman persembahan dan motto hidup ... vii
Intisari ... viii
Abstract ... ix
Kata Pengantar ... x
Daftar Isi ... xiii
Daftar Gambar... xviii
Daftar Tabel ... xx
Daftar Lampiran ... xxi
Daftar Pustaka ... 74
BAB I PENDAHULUAN
... 1
1.1 Judul ... 1
1.2 Latar Belakang Masalah... 1
1.3 Konsep Pembuatan Alat ... ...2
1.4 Tujuan dan Manfaat ... 3
1.7 Metode Penelitian ... 4
1.8 Sistematika Penulisan ... 5
BAB II DASAR TEORI
... 7
2.1 Pengukuran... 7
2.1.1 Metode Pengukuran ... 8
2.2
Standing Wave
(Gelombang Berdiri) ... 11
2.2.1 Rangkaian SWR Meter dan Power Meter Analog ... 13
2.3 Saluran Transmisi ... 14
2.4 Mikrokontroler AVR Attiny2313 ... 16
2.4.1 Arsitektur Mikrokontroler AVR Attiny2313 ... 16
2.4.2 Organisasi Memori... 18
2.4.3
Hardware
AVR Attiny2313... 19
2.4.4
Port
I/O ... 20
2.4.5 Instruksi Mikrokontroler AVR Attiny2313 ... 22
2.4.6 Mode Pengalamatan Memori dan Program Atiny2313 ... 23
2.4.7 Periferal Mikrokontroler AVR Attiny2313... 24
2.4.7.1
Timer/Counter
... 24
2.4.7.2 On-Chip Osilator... 25
2.5 LCD
(Liquid Crystal Display)
... 26
2.5.1 LCD M1632 ... 27
2.5.1.3 CGROM ... 29
2.5.1.4
Register
... 29
2.5.1.4.1
Register
Perintah ... 29
2.5.1.4.2 Penulisan Data ke
Register
Perintah ... 29
2.5.1.4.3 Pembacaan Data dari
Register
Perintah ... 30
2.5.1.5
Register
Data... 30
2.5.1.5.1 Penulisan Data ke
Register
Data ... 30
2.5.1.5.2 Pembacaan Data ke
Register
Data ... 31
2.6 LM 331... 31
2.6.1 Prinsip kerja dari LM 331 ... 32
2.6.2 Rangkaian Aplikasi
Voltage to Frequency Converter
... 34
BAB III PERANCANGAN
... 36
3.1 Diagram Blok ... 36
3.2 Perancangan Perangkat Keras ... 37
3.2.1 Minimun Sistem Mikrokontroler AR Attiny2313 ... 37
3.2.1.1
Reset
Eksternal ... 37
3.2.1.2 Osilator... 39
3.2.1.3 Mikrokontroler AVR Attiny2313 ... 40
3.2.2
Analog Interface
... 40
3.2.3 Rangkaian
Voltage to Frequency Converter
(LM 331) ... 42
3.2.6 Sistematis Rangkaian Keseluruhan ... 47
3.3 Perancangan Perangkat Lunak ... 48
3.3.1 Diagram Alir Program Utama... 48
3.3.2 Diagram Alir Pengambilan Data... 49
3.3.3 Diagram Alir Penghitungan SWR... 50
3.3.4 Diagram Alir Aktifkan LCD ... 50
BAB IV HASIL DAN PEMBAHASAN
... 52
4.1 Proses Kalibrasi Alat Ukur ... 52
4.2 Data Kalibrasi Alat Ukur ... 53
4.3 Data Pengujian Alat Ukur ... 54
4.3.1 Pengukuran tegangan maju (Vfwd), tegangan balik (Vrev) dan data
perhitungan SWR ... 55
4.3.2 Pengukuran Frekuensi Keluaran LM331 ... 57
4.3.3 Pengukuran Frekuensi Maju (Pf), Frekuensi Balik (Pr), Nilai SWR... 59
4.4 Pembahasan... 62
4.4.1 Analisa Data Pengukuran Frekuensi Maju, Frekuensi Balik dan SWR... 62
4.4.2 Analisa Data Pengukuran... 63
4.4.3 Pengoperasian Alat Ukur ... 68
4.4.3.1 SWR Meter dan Power Meter Analog ... 68
4.4.3.2 Penampil Frekuensi Maju (Pf), Frekuensi Balik (Pr), dan SWR ... 68
5.1 Kesimpulan ... 71
5.2 Saran ... 72
Gambar 2.1 Dasar proses pengukuran ... 7
Gambar 2.2 Blok Diagram SWR Meter dan Power Meter Digital ... 10
Gambar 2.3 Gelombang datang dan gelombang pantulan ... 11
Gambar 2.4 Pola Gelombang Berdiri Tegangan ... 13
Gambar 2.5 Rangkaian SWR Meter dan Power Meter Analog ... 13
Gambar 2.6 Penampang kabel
coaxial
... 15
Gambar 2.7.a Peta
Memory
Program ... 18
Gambar 2.7.b Peta Data
Memory
... 18
Gambar 2.8 Konfigurasi pin Attiny2313 ... 19
Gambar 2.9
Reset Input
... 22
Gambar 2.10 Koneksi Osilator... 25
Gambar 2.11 Konstruksi dan cara kerja LCD... 26
Gambar 2.12 Bentuk dan bagian LCD 16x2... 27
Gambar 2.13 Hubungan posisi tampilan dan alamat DDRAM... 28
Gambar 2.14 Blok Diagram LM331 ... 32
Gambar 2.15 Konfigurasi pin LM331... 33
Gambar 2.16 Rangkaian aplikasi
V to F Converter
... 34
Gambar 3.1 Diagram Blok SWR Meter dan Power Meter Digital ... 36
Gambar 3.2 Rangkaian
reset
eksternal... 37
Gambar 3.3 Osilator kristal yanng dihubung ke mikrokontroler ... 39
Gambar 3.4 Rangkaian minimum sistem mikrokontroler... 40
Gambar 3.7 Rangkaian
Voltage to Frequency Converter
... 42
Gambar 3.8 Antarmuka
V to F Converter
dan mikrokontroler... 46
Gambar 3.9 Antarmuka LCD dan mikrokontroler... 47
Gambar 3.10 Sistematis Rangkaian Keseluruhan ... 47
Gambar 3.11 Diagram Alir Program Utama ... 48
Gambar 3.12 Diagram Alir Pengambilan Data ... 49
Gambar 3.13 Diagram Alir Penghitungan SWR... 50
Gambar 3.14 Diagram Alir Akifkan LCD ... 51
Gambar 4.1 Hubungan Proses Kalibrasi alat ukur ... 52
Gambar 4.2 Hubungan Kalibrasi alat ukur ... 53
Gambar 4.3 Grafik perubahan frekuensi keluaran terhadap masukan tegangan
maju (Vin FWD) ... 59
Gambar 4.4 Grafik perubahan frekuensi keluaran terhadap masukan tegangan
keluaran (Vin REV) ... 60
Tabel 3.1 Perbandingan f
out.denganV
in... 45
Tabel 4.1 Data kalibrasi ... 54
Tabel 4.2 Data pengukuran tegangan maju,tegangan balik, dan perhitungan SWR.. 55
Tabel 4.3 Perbandingan data frekuensi keluaran LM331 penngukuran dengan
data perhitungan secara teoritis untuk tegangan maju (Vfwd)... 58
Tabel 4.4 Perbandingan data frekuensi keluaran LM331 penngukuran dengan
data perhitungan secara teoritis untuk tegangan balik (Vrev)... 58
Tabel 4.5 Konversi Penyesuaian f
outLM331 teoritis dengan f
outAFG... 60
Tabel 4.6 Data pengukuran Frekuensi Maju (Pf) dan Frekuensi Balik (Pr) ... 61
Tabel 4.7 Data pengukuran Frekuensi Maju (Pf) dan Frekuensi Balik (Pr) dengan
input AFG1 FWD bervariasi dan AFG2 REV konstan... 61
Tabel 4.8 Data pengukuran Frekuensi Maju (Pf) dan Frekuensi Balik (Pr) dengan
input AFG1 FWD bervariasi dan AFG2 REV bervariasi ... 61
Tabel 4.9 Tingkat kesalahan dan deviasi SWR meter dan Power meter terkalibrasi
(
analog interface
)... 64
Tabel 4.10 Tingkat ketelitian SWR dan Power meter terkalibrasi
(
analog interface
)... 65
Tabel 4.11 Tingkat kesalahan dan deviasi SWR meter digital ... 66
Tabel 4.12 Tingkat ketelitian SWR meter digital ... 66
Tabel 4.13 Amplitudo dan Periode Frekuensi Keluaran AFG... 69
L.1.
Sistematis Rangkaian Keseluruhan.
L.2.
IN60P, IN60S Point Contact Germanium Diode Datasheet
.
L.3.
8-Bit Microcontroller with 2K Bytes In-System Programmablle Flash
ATTiny2313 Datasheet.
L.4.
LM131A/LM131, LM231A/LM231, LM331A/LM331 Precision
Voltage-to-Frequency Converters Datasheet.
L.5.
Listing
Program SWR Meter dan Power Meter Digital.
I.1
Judul
SWR Meter dan Power Meter Digital berbasis mikrokontroler
AVR Attiny2313
I.2
Latar Belakang Masalah
Perkembangan teknologi saat ini mencakup di segala bidang,
seperti bidang komunikasi, kesehatan, keamanan, transportasi, bahkan juga
di bidang elektronik. Salah satu perkembangan teknologi yang cukup
banyak digunakan manusia dewasa ini dalam kehidupannya adalah
peralatan dengan menggunakan sistem mikrokontroler. Maka di sini akan
dibahas aplikasi teknologi mikrokontroler dalam bidang elektronika,
khususnya dalam hal pengukuran.
Keberadaan SWR Meter dan Power Meter di masyarakat, terlebih
bagi mereka yang berkecimpung dalam sistem transmisi komunikasi radio,
dalam hal ini adalah radio yang menggunakan modulasi FM, sangatlah
penting. Hal ini dipengaruhi oleh seberapa besar daya pancar dan daya
pantul, yang keduanya hanya dapat diukur oleh Power Meter. Selain itu,
interferensi yang terjadi antara daya pancar dan daya pantul yang
menghasilkan gelombang tegak dapat diukur melalui SWR Meter.
Faktor-faktor inilah yang mempengaruhi seberapa baiknya sebuah pemancar FM
Selain masalah-masalah di atas, juga terdapat masalah mengenai
kualitas instrumen yang digunakan, apakah baik atau buruk. Jenis SWR
Meter dan Power Meter yang sekarang ini masih terbatas pada jenis
analog. Tentunya cukup banyak kekurangan yang terdapat pada jenis ini,
terlebih dalam hal pembacaan hasil pengukuran, tingkat akurasi,
sensitivitas, tingkat resolusi, dan beberapa factor lainnya. Tentunya
menjadi hal yang sangat tidak praktis dan efektif.
Mengacu pada beberapa permasalahan yang telah dipaparkan
diatas, maka penelitian ini berupaya membuat suatu instrumen yang dapat
digunakan untuk memininalisasi kekurangan dari alat yang telah ada
sebelumnya dengan menggunakan mikrokontroler AVR ATtiny2313.
1.3
Konsep Pembuatan Alat
Dalam merancang perangkat yang akan dibuat, penulis
memanfaatkan mikrokontroler sebagai sarana pengembangan yang penting
dari rangkaian konvensional (analog) yang telah ada. . Proses digitalisasi
yang ingin dirancang tidak semata menghilangkan rangkaian analog
sebagai rangkaian awal. Namun, perancangan dititik-beratkan pada proses
konversi dari analog ke digital yang menggunakan mikrokontroler.
Beberapa
peripheral
dari mikrokontroler yang dapat mendukung dan
meningkatkan kinerja sistem antara lain adalah PIO
(Peripheral Input
Output)
sebagai piranti masukan dan keluaran,
Timer
sebagai penghitung
I.4
Tujuan dan Manfaat
Adapun tujuan pembuatan alat ini adalah:
1)
Memperluas penggunaan mikrokontroler dalam dunia
elektronika, khususnya mikrokontroler ATtiny2313.
2)
Mengukur besarnya gelombang pancar (
forward
) dan
gelombang pantul (
reverse
), membandingkannya dan
menampilkannya dalam LCD (
Liquid Crystal Digital
)
Adapun manfaat pembuatan alat ini adalah :
1)
Sebagai alat pengukuran perbandingan daya pancar dan daya
pantul yang digunakan di instansi komunikasi radio FM dengan
lebih akurat.
2)
Sebagai alat yang mampu mendeteksi kekurangan-kekurangan
pemasangan antena.
I.5 Perumusan
Masalah
Dengan melihat tujuan dan latar belakang yang ada, maka
permasalahan yang dapat dirumuskan pada pembuatan alat ini adalah
sebagai berikut:
1)
Apakah digitalisasi SWR Meter dan Power Meter dengan
menggunakan mikrokontroler Attiny2313 akan memiliki
tingkat ketelitian yang tinggi?
3)
Apakah pemilihan komponen yang tepat akan mempengaruhi
hasil pengukuran yang baik?
I.6 Batasan
Masalah
Agar permasalahan yang ada tidak berkembang menjadi luas, maka
perlu adanya batasan terhadap permasalahan yang akan dibuat yaitu:
a.
Modulasi frekuensi pemancar yang digunakan adalah modulasi FM
b.
Pemancar FM tidak menjadi bagian alat yang dirancang.
c.
Daya yang terukur maksimal 10 Watt.
d.
Tingkat resolusi alat sebesar 10mWatt.
e.
Unit keluaran dinyatakan dengan tampilan di LCD
1.7 Metode
Penelitian
Metode yang digunakan dalam penelitian ini adalah
mengumpulkan sejumlah referensi atau literatur dari perpustakaan,
internet
, dan sebagainya, kemudian menyusunnya dan dengan melakukan
serangkaian percobaan.
1.8 Sistematika
Penulisan
Penulisan terdiri dari 5 buah Bab yaitu :
1.
BAB I – Pendahuluan
Bagian ini menjelaskan beberapa hal penting yang akan
dibahas dalam keseluruhan tugas akhir ini beserta
batasan-batasan masalahnya.
2.
BAB II – Dasar Teori
Mengemukakan tentang teori-teori dasar yang
melandasi keseluruhan penulisan tugas akhir dan pembuatan
perangkat. Berisi tentang teori dasar dan mikrokontroler yang
digunakan dalam perancangan alat.
3.
Bab III – Perancangan Perangkat Keras dan Perangkat Lunak
Membahas secara terperinci perancangan perangkat
keras beserta perhitungan matematis dan pendekatan pemilihan
komponen yang digunakan.
Membahas sistematika program perangkat lunak dari
mikrokontroler AVR ATtiny2313 untuk mengoperasikan
perangkat keras beserta diagram alirnya secara lengkap, yang
membuat rangkaian tersebut bisa beroperasi.
4.
Bab IV – Pembahasan
Membahas cara pengoperasian perangkat sesuai dengan
perangkat-perangkat komunikasi yang dapat dipadukan dengan
perangkat yang dirancang.
5.
Bab V – Kesimpulan dan Saran
Memberi kesimpulan akhir terhadap perancangan dan
penelitian perangkat serta memberikan masukan-masukan
mengenai pengoperasian dan pengembangan perangkat secara
maksimal.
7 2.1 Pengukuran
Secara definitif, fungsi pengukuran adalah untuk mendapatkan besaran kuantitatif yang merupakan hasil perbandingan antara sesuatu yang ingin dikehendaki terhadap standarnya. Umumnya, didalam pengukuran dibutuhkan instrumen sebagai suatu cara fisis untuk menentukan suatu besaran (kuantitas) atau variabel.
Proses atau kegiatan pengukuran merupakan pembandingan kuantitatif antara standar yang telah ditentukan sebelumnya dengan yang diukur, seperti yang diperlihatkan gambar 2.1
Gambar 2.1Dasar proses pengukuran
Beberapa istilah yang berkaitan dengan pengukuran sebagai berikut:
1. Presisi ( ketelitian )
Presisi merupakan suatu ukuran kemampuan untuk mendapatkan hasil pengukuran yang serupa dari sejumlah pengukuran yang dilakukan secara berulang dengan kondisi yang sama.
Proses perbandingan pengukuran
Standar
Yang diukur (masukan)
2. Akurasi ( ketepatan )
Akurasi merupakan sifat kedekatan pembacaan alat ukur dengan nilai sebenarnya dari variabel yang diukur. Akurasi ditentukan dengan cara mengalibrasi dengan keadaan atau kondisi operasi tertentu.
3. Sensivitas ( kepekaan )
Sensivitas merupakan perubahan terkecil dari masukan yang mempengaruhi keluaran.
4. Resolusi ( kemampuan pembacaan skala )
Resolusi diartikan sebagai satuan terkecil dari keluaran.
5. Treshold
Treshold merupakan nilai minimum perubahan masukan yang tidak
dapat diamati atau dideteksi, bila masukan berangsur-angsur bertambah dari nol.
6. Linearitas.
Linearitas merupakan kemampuan untuk menghasilkan ukuran alat ukur yang menghasilkan keluaran secara linear.
2.1.1 Metode Pengukuran
Terdapat dua macam dasar metode pengukuran:
misalnya pengukuran panjang suatu batang dengan penggaris atau meteran.
2. Pembandingan tak langsung dengan menggunakan sistem yang telah dikalibrasi. Rangkaian alat-alat ini mengubah bentuk dasar masukan menjadi bentuk analogi yang kemudian diproses dan disajikan di bagian keluran sebagai fungsi masukan yang diketahui. Konversi seperti itu sering dilakukan agar informasi yang diinginkan dapat dimengerti. Bantuan suatu sistem diperlukan untuk mengindera, mengubah dan akhirnya menampilkan keluaran analog dalam bentuk perpindahan skala, grafik atau bentuk digital.
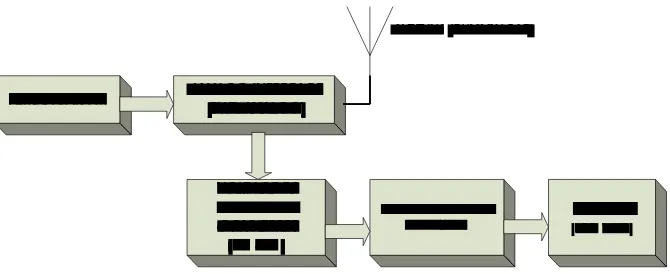
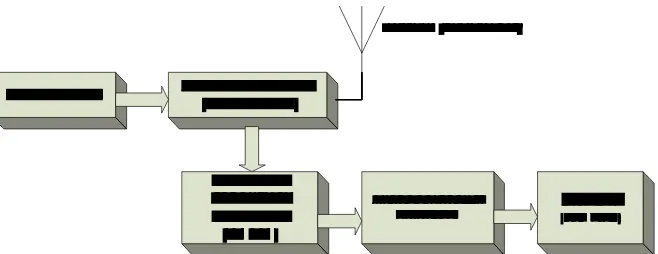
Blok diagram SWR Meter dan Power Meter Digital dapat diperlihatkan pada gambar 2.2
Gambar 2.2 Blok Diagram SWR Meter dan Power Meter digital Diasumsikan impedansi sumber (pemancar FM) dan impedansi beban (antena) adalah macthed. Pemancar FM yang melalui saluran transmisi mempunyai parameter daya (P) yang terdiri dari tegangan (V) dan arus (I) .Analog Interface adalah rangkaian SWR analog yang mampu mendeteksi adanya daya pancar dan daya pantul. Setelah terjadi proses pendeteksian tegangan pada daya pancar dan daya pantul, maka dapat dilanjutkan ke proses berikutnya yaitu pengubahan data.
2.2 Standing Wave ( Gelombang Berdiri )
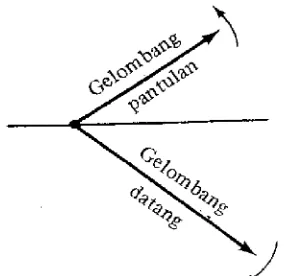
Bila impedansi beban tidak sesuai dengan impedansi saluran, sebagian dari energi pada gelombang datang akan dipantulkan pada beban. Kondisi ini menimbulkan suatu gelombang pantulan yang berjalan kembali di sepanjang saluran ke arah sumbernya. Dan apabila impedansi sumber tidak sesuai dengan impedansi saluran, maka akan kembali timbul pantulan-pantulan lainnya. Pantulan-pantulan majemuk dapat ditimbulkan baik pada beban maupun pada sumber. Efek keseluruhannya dapat ditunjukkan sebagai resultan dari suatu gelombang datang dan gelombang pantulan tunggal seperti yang terlihat pada gambar 2.3
Gambar 2.3 Gelombang datang dan Gelombang pantulan
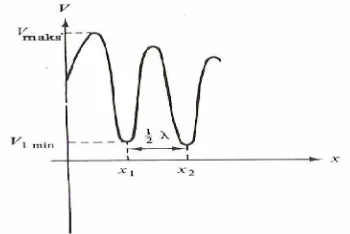
Gambar 2.4 menunjukkan sketsa tegangan sebagai fungsi dari jarak
Gambar 2.4 Pola Gelombang berdiri tegangan
Perbandingan gelombang-berdiri tegangan ( voltage standing-wave ratio) didefinisikan sebagai :
VSWR =
MIN MAKS
V V
(2-1)
Dengan VMAKS = amplitudo maksimum gelombang berdiri
MIN
V = amplitudo minimum gelombang berdiri Atau dengan persamaan
SWR =
Pr Pr − +
Pf Pf
(2-2)
DenganPf= daya pancar (forward power)
Pr = daya pantul (reverse power) Contoh perhitungan besar SWR :
Diketahui Pf= 9 watt ,
r
P = 3 watt , Maka besar SWR adalah :
SWR =
Pr Pr − +
Pf Pf
= 3 -9
3 9+
= 6 12
VSWR mempunyai nilai dari satu sampai tak terhingga ( 1 VSWR ). Nilai VSWR yang ideal seharusnya sama dengan satu, karena ini merepresentasikan suatu keadaan yang disesuaikan ( matched), dan pengaturan-pengaturan praktis pada saluran transmisi sering ditujukan untuk membuat VSWR yang minimum.
2.2.1 Rangkaian SWR Meter dan Power Meter Analog
Gambar 2.5 Rangkaian SWR meter dan Power Meter Analog Seperti yang diketahui bahwa nilai SWR ideal bernilai 1, yang mempresentasikan keadaan yang disesuaikan (matched) antara impedansi karakteristik saluran transmisi (ZO) dan impedansi beban atau antena
beban ( antena ).
Pada gambar 2.5, keluaran dari daya pancar dan daya pantul masing-masing diindikasikan oleh VO Meter. Untuk menghitung besarnya nilai SWR dilakukan secara manual menggunakan persamaan (2-1).
2.3 Saluran Transmisi
Saluran transmisi adalah bagian yang menghantarkan daya yang dihasilkan pemancar ke antena. Sebagai bagian yang menghantarkan daya, saluran transmisi yang ideal tidak akan mengurangi daya yang dihantarkannya dan juga tidak meradiasikan daya.
Namun pada kenyataannya, saluran transmisi juga mengurangi daya yang disalurkannya. Daya yang berkurang berubah menjadi panas dan sebagian kecil diradiasikan. Agar transfer daya terjadi secara maksimal maka saluran transmisi juga harus mempunyai impedansi karakteristik ( ZO) yang sama dengan sumber dan beban (ZL). Saluran
transmisi yang sering digunakan adalah kabel coaxial, karena kabel jenis ini dirancang untuk mampu menghantarkan frekuensi yang tinggi. Impedansi karakteristik (ZO) . Kabel coaxial juga bermacam-macam tergantung kegunaan dan kebutuhan yang diinginkan. Kabel coaxial
Gambar 2.6 Penampang kabel coaxial
Keterangan gambar
A :plastic jacket
B :metallic shield
C :dielectric insulator
D :centre core
Dummy Load dapat dibuat sendiri dengan memasang paralel beberapa resistor sehingga didapatkan resistansi yang diinginkan. Resistor karbon dan resistor film mempunyai induktor parasit yang minimal sehingga banyak dipakai untuk membuatdummy load.
2.4 Mikrokontroler AVR ATtiny2313
Bagian ini akan mendeskripsikan Mikrokontroler AVR ATtiny2313 yang merupakan inti rangkaian yang dibangun. Beberapa bagian yang akan dibahas diantaranya yaitu mengenai arsitektur mikrokontroler, gambaran mengenai instruksi, mode pengalamatan memori dan program, serta periferal-periferal pendukung.
2.4.1 Arsitektur Mikrokontroler AVR ATtiny2313
AVR adalah mikrokontroler 8-Bit yang dibangun pada arsitektur komputer RISC (Reduce Instruction Set Computer). CPU (Central
Processing Unit) mampu melakukan sebuah instruksi dalam satu putaran
clock, sehingga ATtiny2313 dapat mencapai 1 MIPS (Millions of
Instructions Per Second) per MHz, dan memungkinkan perancangan yang
optimal untuk konsumsi daya dan kecepatan proses.
Inti kombinasi AVR adalah kombinasi instruksi yang beraneka ragam dengan 32 register (32General Purpose Working Registers). Ke-32 register tersebut langsung dihubungkan ke Arithmetic Logic Unit (ALU).
efisien sepuluh kali dari mikrokontroler jenis CISC seperti AT89Cxxx atau AT89Sxxx.
Enam dari 32registerdapat digunakan sebagai tiga buah pasangan
register untuk pengalamatan tak langsung ( Indirect Addressing ). Ketiga
pasangan register ini kemudian disebut sebagai 16-bit register
X ( R27:R26 ), register Y ( R29:R28 ), register Z ( R31:R30 ), yang digunakan juga sebagai penunjuk alamat ( address pointer ) untuk mengakses tabel konstanta yang tersimpan dalam program memory.
ATtiny2313 memiliki 2K byte In-System Programmable Flash, 128 byte EEPROM, 128 byte SRAM, 18 salurangeneral purpose I/O line,
32general purpose working register,interface Single-wire untukOn-chip
debugging, 2 flexible Timer/Counter dengan mode pembanding, interupsi
internal dan eksternal, sebuah programmable serial USART, USI
(Universal Serial Interface) dengan detektor kondisi awal,programmable
WatchDog Timer dengan osilator internal, dan tiga software selectable
mode power-saving yaitu mode Idle, mode Power-down, dan mode
Standby.
AVR memiliki arsitektur Harvad dengan memory terpisah antara program dan data. Program memory diakses dalam 2 tahap berurutan (2
stage pipeline). Saat sebuah instruksi sedang dijalankan instruksi
berikutnya diambil dari program memory. Konsep ini memungkinkan sebuah instruksi dapat dijalankan dalam satu putaranclock.
yang ditinggalkan disimpan dalam stack pointer, kemudian CPU menjalankan program yang dipanggil atau program yang melayani interupsi seperti yang ditunjukkan dalam vector interupsi. Program akan kembali ke alamat yang ditinggalkan setelah instruksi RET (Return) untuk
subroutine atau RETI (Return From Interrupt) dijalankan.
2.4.2 Organisasi Memori
Secara garis besar ATtiny2313 mempunyai dua memori utama,yaitu :
1. Data Memory, dengan pembagian :
1) 32 register keperluan umum (GPR) digunakan untuk seluruh operasi instruksi.
2) Register I/O digunakan untuk mengontrol mikrokontroler.
3) 128 x 8 SRAM untuk keperluan penyimpan data sementara. 2. Program Memory ; memiliki kapasitas 1Kx16 dengan lebar data 10
bit.
Selain dua memori utama diatas, ATtiny2313 juga memiliki memori EEPROM yang digunakan untuk memori data program
nonvolatile.
(a) (b)
2.4.3 Hardware AVR ATtiny2313
AVR ATtiny2313 tersedia dalam dua jenis kemasan yaitu 20 DIP dan 20 SOIC. Kemasan ini tidak memerlukan instalasi kabel yang melibatkan banyak jalur sebagaimana pada mikrokontroler dengan jumlah pin diatas 40 buah. Konfigurasi pin pada mikrokontroler AVR ATtiny2313 ditunjukan gambar 2.8.
Gambar 2.8 Konfigurasi Pin ATtiny2313 Fungsi dari masing-masing pin :
1. VCC sebagaipower supply (pin 20). 2. GND sebagaiground (pin 10).
3. Port A (PA2..PA0) merupakan port I/O 3-bit bi-directional. Memiliki fungsi khusus lain seperti XTAL1, XTAL2, danReset. 4. Port B (PB7..PB0) merupakanport I/O 8-bitbi-directional.Buffer
output port ini mempunyai karakteristik penggerak dengan
kemampuan mencatu (source) dan menyerap (sink).
5. Port D (PD6..PD0) merupakanport I/O 7-bitbi-directional.
6. RESET merupakan reset input, yang akan aktif apabila pin ini
7. XTAL1 merupakan input bagi inverting oscillator amplifier dan
input untuk rangkaianclock internal.
8. XTAL2 merupakanoutput inverting oscillator amplifier.
2.4.4 Port I/O
ATtiny2313memiliki 3 buahport I/O yaitu : 1. Port B
Port B merupakan port I/O 8 bit bidirectional yang masing-masing pinnya dapat dikonfigurasi secara individual. Masing-masing pin dalam port ini juga memiliki fasilitas berupa resistor
pull-up internal yang berguna untuk memberikan kondisi yang
tentu pada saat dikonfigurasi sebagai input tanpa harus memberi
pull-upeksternal.
Port B mempunyai 3 perangkatregister dengan fungsi tertentu, yaitu :
i. Data register port B (PORTB), berlokasi $18 ($38).
Register ini dapat ditulis dan dibaca.
ii. Data direction register port B (DDRB), berlokasi $17
($37).Register ini dapat ditulis dan dibaca.
iii. Port B Input Pin (PINB), berlokasi $16 ($36). Merupakan
pin fisik padahardware dan hanya dapat dibaca.
2. Port D
Port D memiliki tiga buah lokasi memori yang berkaitan dengan penggunaanya sebagai port I/O. Memori-memori tersebut adalah:
i. PORTD (Data Direction) berlokasi pada $12.
ii. DDRD (Data Direction Register port D) berlokasi pada $11.
iii. PIND (Port D Input Pins) berlokasi pada $10. PIND bukanlah register. PIND hanya dapat dibaca.
Format Port D hampir sama dengan Port B dalam hal konfigurasi I/O dan dalam penggunaan resistor pull-up. Hal yang membedakan dengan Port B adalah jumlah pin yang bisa digunakan hanya 7 buah, karena sesuai dengan jumlah pin yang ada pada Port D. Pin-pin pada Port D juga memiliki fungsi alternatif lain.
3. PortA
Port A mempunyai 3 bitbi-directional, berbeda denganPortB maupun Port D. Namun, seperti halnya Port B, port ini dapat dikonfigurasi secara individual (per bit sebagai input ataupun
output).Port A juga memiliki 3 perangkatregister, yaitu :
i. Dataregister port A (PORTA), berlokasi di $1B($3B).
ii. Data Direction Register port A (DDRA), berlokasi di
$1A($3A).
Fungsi alternatifportA dapat digunakan jika dalam pengaturan
system clock yang dipakai menggunakanoscillatoreksternal.
Gambar 2.9Reset input
Penentuan reset (PA2) dapat dilakukan dengan mengatur nilai resistor dan kapasitornya. Untuk membuat keadaanreset, tegangan maksimal yang harus diberikan pada pin ini Vc = 0,85 Vcc
(datasheet AVR ATtiny2313). Persamaan yang terjadi adalah
sebagai berikut :
)
e
1
(
Vcc
Vc
RCt
=
(2-3)Dengan VC =tegangan maksimal ; 0.85VCC (volt) =
R resistansi ( ) =
C kapasitansi (Farad) =
t reset time (mS)
2.4.5 Instruksi pada Mikrokontroler AVR ATtiny2313
dan tes bit. Terdapat beberapa operasi “skip” yang dapat melewati (skip) sebuah instruksi setelah satu instruksi tes dilakukan.
Seluruh register dalam ATtiny2313 dapat digunakan sebagai akumulator, setengah bagian bawah register file digunakan untuk nilai segera (immediate value). Hampir seluruh op code ATtiny2313 mempunyai panjang 16-bit, hanya 2 instruksi mempunyai panjang 32-bit yaitu, LDS (Load Direct From Data Spac) dan STS Store Direct to Data
Space).
2.4.6 Mode Pengalamatan Memori dan Program ATtiny2313
Terdapat lima buah pengalamatan data memory yang dapat dilakukan yaitu:
1. Pengalamatan Langsung (Direct Addressing). 2. Pengalamatan Tak Langsung (Indirect Addressing).
3. Pengalamatan Tak Langsung dengan Displacement (Indirect
Addressing With Displacement).
4. Pengalamatan Tak Langsung dengan Post-increment (Indirect
Addressing With Post-increment).
5. Pengalamatan Tak Langsung dengan Pre-decrement
(IndirectAddressing With Pre-decremen) .
Sedang untuk pengaksesan konstanta pada program memory
digunakan sebuah instruksi khusus yaitu LPM ( Load Program Memory) yang mengambil data pada alamat program memory yang ditunjukregister
Untuk pengalamatan relatif dari program yang dijalankan
(Relative Program Addressing) digunakan RJMP (Relative Jump) dan
RCALL (Relative Call). Sedang pengalamatan tak langsung program
(Indirect Program Addressing) digunakan perintah IJMP (Indirect Jump)
dan ICALL (Indirect Call).
2.4.7 Periferal Mikrokontroler AVR ATtiny2313
Mikrokontroler AVR ATtiny2313 dilengkapi dengan beberapa periferal. Untuk dapat mengkonfigurasi fungsi dari periferal-periferal tersebut maka yang harus dilakukan adalah mengatur setting bit pada
register kontrol yang bersangkutan.
2.4.7.1Timer/Counter
ATtiny2313 memiliki 2 buah timer/counter yang masing-masing mempunyai seleksiprescale terpisah dari sebuah prescale
yang sama.
Yang pertama adalah Timer/Counter0 yang merupakan
8-bit timer/counter dengan dua unit output compare match
independen, dan mendukung untuk operasi PWM. Timer/Counter0
dapat di-clock melalui sumber clock internal maupun eksternal. Sumberclockdipilih melaluiclock select logic yang dikontrol oleh
bitclock select (CS02..0) yang berada dalamregister TCCR0B.
Yang kedua adalah Timer/Counter1 merupakan 16-bit
pembangkitan gelombang, dan pengukuran waktu (timing) sinyal.
Timer/Counter1 dapat di-clock secara internal maupun eksternal
(pin T1). Sumber clock dipilih melalui clock select logic yang dikontrol oleh bit clock select (CS12..10) yang berada dalam
register TCCR1B.
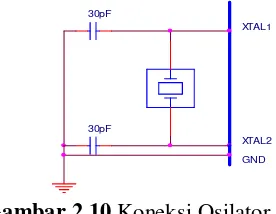
2.4.7.2On-chip Osilator
ATtiny2313 dilengkapi denganon-chip osilator yang dapat berosilasi dengan hanya menghubungkan 3 buah komponen luar tambahan. Pin XTAL1 dan XTAL2 adalah input dan output
inverting amplifier. Untuk membangkitkan frekuensi osilasi yang
diinginkan dapat menggunakan kristal atau keramik resonator
30pF 30pF
GND XTAL1
XTAL2
Gambar 2.10Koneksi Osilator
2.5 LCD (Liquid Crystal Display)
LCD adalah suatu piranti keluaran yang dapat menampilkan karakter huruf atau gambar. LCD tersusun dari 2 buah kaca dengan penghantar (electrode) transparan yang diantaranya disisipkan kristal cair
(liquid crystal).
Kaca bagian belakang mempolarisasi cahaya secara vertikal, sedangkan kaca bagian depan mempolarisasi cahaya secara horisontal. Ketika tidak terdapat medan listrik di antara kedua elektroda, kristal cair membentuk pola-pola yang acak, sehingga cahaya yang sudah terpolarisasi vertikal dapat berputar dan menembus kaca bagian depan yang terpolarisasi horisontal. Namun ketika suatu medan listrik diberikan di antara kedua elektroda, kristal cair akan membentuk pola yang seragam dan tidak ada cahaya yang diputar, sehingga tidak ada cahaya yang menembus kaca bagian depan. Dengan susunan dan bentuk pola elektroda tertentu dapat dihasilkan huruf atau gambar yang akan ditampilkan.
2.5.1 LCD M1632
LCD M1632 adalah LCD dot matrik yang membutuhkan daya yang kecil. LCD M1632 mempunyai 16 karakter, dua baris matrik 5 x 7 . Setiap karakter dibentuk oleh 8x5 atau 10x5pixel. Kapasitas RAM sebesar 80byte atau maksimum 80 karakter.
Gambar 2.12 Bentuk LCD 16x2 dan bagian LCD16x2
Penomoran pin dan fungsinya sebagai berikut : 1. Pin 1 (GND) : tegangan 0 Volt modul LCD. 2. Pin 2 (VCC) : tegangan +5 Volt untuk catu LCD. 3. Pin 3 (VEE) : tegangan pengatur kontras LCD
4. Pin 4 (RS) : Register Select, pin pemilih register yang akan diakses.
1 = akses keregisterdata ; 0 = akses keregisterperintah 5. Pin 5 (R/W) : mode baca atau tulis LCD.
1 = mode pembacaan ; 0 = mode penulisan.
8. Pin 15 (Anoda) : tegangan positif backlight modul LCD sekitar 4,5Volt.
9. Pin 16 (Katoda) : tegangan negatif backlight modul LCD sebesar 0Volt.
2.5.1.1 DDRAM (Display Data Random Access Memory )
DDRAM adalah merupakan memori tempat karakter yang ditampilkan berada. Contoh, untuk karakter ‘A’ atau 41H yang ditulis pada alamat 00h, maka karakter tersebut akan tampil pada baris pertama dan kolom pertama dari LCD. Apabila karakter tersebut ditulis di alamat 40h, maka karakter tersebut akan tampil pada baris kedua kolom pertama dari LCD. Hubungan posisi tampilan dan alamat DDRAM ditunjukkan gambar 2.13.
Gambar 2.13 Hubungan posisi tampilan dan alamat DDRAM.
2.5.1.2 CGRAM(Character Generator Random Access Memory)
2.5.1.3 CGROM (Character Generator Read Only Memory )
CGROM adalah memori untuk menggambarkan pola sebuah karakter dan pola tersebut sudah ditentukan secara permanen dari HD44780 sehingga pengguna tidak dapat mengubah lagi. Memori ini bersifat permanen, sehingga pola karakter tidak akan hilang meskipower
supplytidak aktif.
2.5.1.4Register
HD44780 memiliki dua buah register yang aksesnya di atur menggunakan kaki RS. Pada saat RS berlogika 0, register yang di akses adalah register perintah dan pada saat RS berlogika 1, register yang diakses adalahregisterdata.
2.5.1.4.1Register Perintah
Register perintah adalah register dimana perintah-perintah dari
mikrokontroller ke HD44780 pada saat proses penulisan data atau tempat status dari HD44780 dapat dibaca pada saat pembacaan data.
2.5.1.4.2 Penulisan Data keRegister Perintah
Penulisan data ke register perintah dilakukan dengan tujuan mengatur tampilan LCD, inisisalisasi, dan mengatur Address Counter
maupunAddress Data. Kondisi RS berlogika 0 menunjukkan akses data
keregister perintah. RW berlogika 0 menunjukkan proses penulisan data
dikirimkan diawali pulsa logika 1 pada E Clock. Selanjutnya, nibble
rendah (bit 3 sampai bit 0) dikirimkan diawali pulsa logika 1 pada
Enable clock lagi. Untuk mode 8 bit interface, proses penulisan dapat
langsung dilakukan 8 bit (bit 7 ... bit 0) dan diawali sebuah pulsa logika 1 pada EClock.
2.5.1.4.3 Pembacaan Data dariRegister Perintah
Proses pembacaan data pada register perintah biasa digunakan untuk melihat statusbusy dari LCD atau membacaAddress Counter. RS diatur pada logika 0 untuk akses ke register perintah, R/W diatur pada logika 1 yang menunjukkan proses pembacaan data. Pembacaan 4 bit
nibble rendah dibaca diawali pulsa logika 1 padaEnable Clock. Untuk
Mode 8 bit Interface, pembacaan 8 bit ( nibble tinggi dan rendah ) dilakukan sekaligus diawali sebuah pulsa logika 1 pada Enable Clock.
2.5.1.5Register Data
Register data adalah register dimana mikrokontroller dapat
menuliskan atau membaca data ke atau dari DDRAM. Penulisan data pada
register akan menempatkan data tersebut dari DDRAM sesuai dengan
alamat yang telah diatur sebelumnya.
2.5.1.5.1 Penulisan Data keRegister Data
pada RS yang menunjukkan akses ke register data, kondisi R/W diatur pada logika 0 yang menunjukkan proses penulisan data. Data 4 bitnibble
tinggi (bit 7 hingga bit 4) dikirimkan diawali pulsa logika 1 pada sinyal
Enable Clock dan kemudian diikuti 4 bitnibble rendah (bit 3 hingga bit
0) yang juga diawali pulsa logika 1 pada sinyalEnable Clock.
2.5.1.5.2 Pembacaan Data dariRegister Data
Pembacaan data dari register data dilakukan untuk membaca kembali data yang tampil pada LCD. Proses dilakukan dengan mengatur RS pada logika 1 menunjukkan adanya akses ke register data. Kondisi R/W diatur pada logika tinggi menunjukkan adanya proses pembacaan data. Data 4 bitnibble tinggi (bit 7 hingga bit 4) dibaca dengan diawali adanya pulsa logika 1 pada E Clock dan dilanjutkan dengan data 4 bit
nibble rendah (bit 3 hingga bit 0) yang juga diawali dengan pulsa logika
1 pada E Clock.
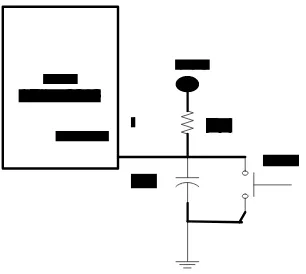
2.6 LM 331
Gambar 2.14 Blok Diagram LM 331
2.6.1 Prinsip kerja dari LM 331
Komparator tegangan membandingkan tegangan input positif (V1) pada pin 7 dengan tegangan VX pada pin 6. Apabila tegangan V1 lebih
besar dari tegangan VX, maka komparator akan memicu timer. Keluaran dari timer akan aktif (on) bersamaan dengan frekuensi keluaran dan sumber arus untuk periode (T) tertentu. Besar nilai periode (T) dapat dihitung dengan rumusan :
T = 1.1 x Rtx Ct (2-4) Selama periode ini, arus mengalir menuju ke sumber arus
(swicthed current source) dan menghasilkan muatan ( Q ) pada kapasitor,
L
Dengan tidak adanya arus yang mengalir dari pin 1, kapasitor CL secara berangsur-angsur akan di non aktifkan oleh RL sampai tegangan
X
V menurun menuju ke level tegangan V1. Lalu komparator akan memicu
timer dan memulai siklus yang baru.
Arus yang mengalir menuju kapasitor CL adalah arus rata-rata
(IAVERAGE) yang diperoleh dengan persamaan :
AVERAGE
I = i x ( 1.1 x Rtx Ct) x f (2-5) Sedangkan arus yang mengalir dari kapasitor CL disebut IO, yang diperoleh dengan perbandingan antara tegangan VXdan besar resistansi
L
R atau sebanding dengan perbandingan antara tegangan VIN dan besar resistansi RL.
O
I =
L IN L X
R V R V
(2-6)
Bila tegangan VIN lebih besar dua kali lipat, frekuensi juga akan lebih besar dua kali lipat untuk mempertahankan keseimbangan.
Gambar 2.15 Konfigurasi pin LM 331 Adapun nama pin dan fungsinya sebagai berikut :
1. Current output( arus keluaran ).
3. Frequency output( frekuensi keluaran ).
4. Ground.
5. R/C ( dihubungkan dengan resistor atau kapasitor ).
6. Threshold( tegangan ambang ).
7. Comparator input( masukan komparator ).
8. Voltage supply( tegangan sumber ).
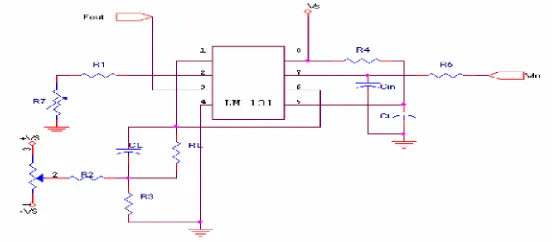
2.6.2 Rangkaian AplikasiVoltage to Frequency Converter
Gambar 2.16 Rangkaian AplikasiVoltage to Frequency Converter
Rangkaian aplikasi diatas adalah rangkaian sederhana yang digunakan untuk konversi tegangan menjadi frekuensi. Penambahan komponen-komponen seperti resistor, kapasitor, resistor variabel dimaksudkan supaya hasil yang dikeluarkan lebih baik dibandingkan tanpa ada penambahan komponen-komponen.
dihubungkan ke ground. Kapasitor CIN pada pin 7 yang dihubungground
difungsikan sebagai filter untuk teganganVIN.
Selanjutnya untuk memberikan efek hysterisis yang membantu komparator input menghasilkan keluaran yang lebih linear 0.03%
(datasheet LM331) ditambah resistor R3. Penambahan resistor R1 dan
resistor variabel R7 yang dihubung secara seri dimaksudkan untuk
menjaga besargain yang dihasilkan sesuai dengan toleransi gain LM 131. Frekuensi keluaran ( fOUT) LM 331 mempunyai kisaran dari 1 Hz sampai 100 kHz (datasheet LM 331). Perhitungan untuk mengatur seberapa besar frekuensi keluaran ( fOUT) yang diinginkan adalah sebagai
berikut :
OUT
f =
t t L S IN
C R x R R x v V
. 1 09
.
2 (2-7)
Dengan : fOUT = frekuensi keluaran (Hz),
IN
V = masukan komparator (v),
S
R = resistansi arus referensi ( ),
L
R = resistansi beban ( ),
t
R = resistansi pewaktuan ( ),
t
36
Pada bab ini berisi tentang perancangan SWR Meter dan Power Meter digital berbasis mikrokontroler AVR Attiny2313, dengan bagian-bagian mikrokontroler Attiny2313, Analog Interface, LM 331 dan penampil yaitu LCD M1632 ukuran 16 x 2.
3.1 Diagram Blok
SWR Meter dan Power Meter digital berbasis Mikrokontroler AVR Attiny2313 adalah suatu alat pengembangan dari alat yang telah ada sebelumnya, yaitu SWR Meter dan Power Meter analog. Pengkonversian data keluaran analog menjadi data keluaran digital dilakukan dengan menggunakan mikrokontroler Attiny2313. Data keluaran digital ditampilkan pada tampilan LCD 16x2. Diagram blok dari sistem kerja alat ini ditunjukkan pada gambar 3.1.
3.2 Perancangan Perangkat Keras
3.2.1 Minimum Sistem Mikrokontroler AVR Attiny2313 3.2.1.1 Reset Eksternal
Reset terjadi apabila pinreset mendapat logika 0 selama lebih dari
50ns. Pinreset dihubungkan dengan resistor (R1) yang terhubung ke VCC dan kapasitor (C1) yang terhubung ke ground. Rangkaian reset eksternal ditunjukan pada gambar 3.2.
Gambar 3.2 Rangkaian reset eksternal.
Pada perancangan ini digunakan waktu 1ms untuk mereset
mikrokontroler. Penentuan reset eksternal dapat dilakukan dengan mengatur nilai resistor dan kapasitornya. Untuk membuat keadaan reset
tegangan maksimal yang harus diberikan pada pin ini Vc = 0,85 Vcc
(datasheet AVR Attiny2313). Untuk mencari besar nilai C1 digunakan
persamaan (2-3)
)
e
1
(
Vcc
Vc
RCt
-=
Vcc
85
,
0
)
e
1
(
Vcc
RCt
=
85 , 0 ) e 1 ( RC ms 1 =
-1
85
,
0
e
RC ms 1-=
-15 , 0 e RC ms 1 -= -15 , 0 ln RC ms 1 = RC 15 , 0 ln ms1 = ×
15 , 0 ln ms 1 RC= 3 10 5271 , 0
RC= ×
Ditentukan resistor yang digunakan 10k , maka kapasitornya dapat dicari dengan:
3
10 5271 , 0 RC= ×
3 10 5271 , 0 C k
10 × = ×
× = k 10 10 5271 , 0 C 3 9 10 7114 , 52
Jadi kapasitor minimum yang dapat digunakan adalah 52,7114 10 9
× .
Pada perancangan ini digunakan kapasitor 56 nF.
3.2.1.2 Osilator
Salah satu kelebihan mikrokontroler AVR Atttiny2313 adalah kecepatannya dalam melakukan eksekusi program. AVR Attiny2313 membutuhkan waktu satu siklusclock untuk melakukan eksekusi terhadap suatu instruksi.
Pada perancangan ini digunakan kristal osilator 4 MHz sebagai
clock input dengan dua kapasitor C2 dan C3 sebesar 22pF (datasheet AVR
Hardware Design Consideration). Rangkaian osilator yang digunakan
pada perancangan ini ditunjukkan pada gambar 3.3.
3.2.1.3 Mikrokontroler ATtiny2313
Mikrokontroler berfungsi sebagai rangkaian pengkonversi data analog ke data digital, proses pengolahan data sebagai fungsi untuk menghitung besar SWR dilakukan disini.
Gambar 3.4Rangkaian Minimum Sistem Mikrokontroler Attiny2313
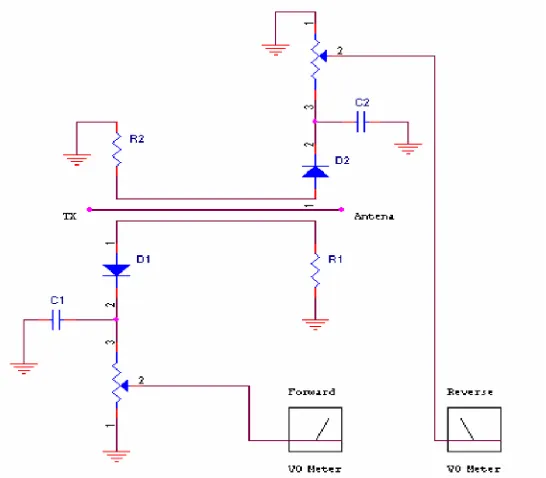
3.2.2 Analog Interface
Analog interface merupakan rangkaian analog SWR Meter dan
Power Meter , yang mempunyai dua buahpoint pengukuran yaitu forward
danreverse. Masing-masingpoint pengukuran akan mendeteksi seberapa
besar daya pancar dan daya pantul yang berada di saluran transmisi. Sesuai dengan fungsi detektor tegangan, maka dioda (D1 dan D2) yang digunakan adalah jenis bahan germanium yaitu 1N60. Keluaran yang dihasilkan juga lebih linear.
Gambar 3.5 RangkaianAnalog Interface
Untuk impedansi beban (ZL) digunakandummy load, yaitu beban
yang impedansinya diketahui secara pasti sebagai acuan dan beban yang bebas dari pengaruh frekuensi dan dapat menangani pembuangan daya yang besar (merubah semua daya datang menjadi panas). Impedansi
dummy load biasanya 50 atau 75 . Dalam perancangan ini ,dummy load
yang digunakan adalah yang berimpedansi 50 . Untuk mendapatkan besar resistansi 50 dapat dicari dengan mem-paralel-kan 20 buah resistor 1k ,1 2 Watt seperti ditunjukkan gambar 3.6 dibawah.
R16 1K R6 1K R10 1K R19 1K R3 1K R7 1K R8 1K R9 1K R1 1K R12 1K R17 1K R13 1K R20 1K R11 1K R18 1K R5 1K R15 1K R2 1K R14 1K DUMMY LOAD 50 OHM
R4 1K
Gambar 3.6Dummy Load
Dummy Load sebesar 50 didapat dari perumusan
total
R 1
= + +
k 1
1 ... k
1 1
total
R 1
= k 1
20
total
R = 20 k 1
total
R = 50
3.2.3 RangkaianVoltage to Frequency Converter( LM 331)
Gambar 3.7RangkaianVoltage to Frequency Converter
nilai-nilai komponen yang dimaksudkan untuk memberi hasil lebih baik disesuaikan dengan karakteristik LM 331.
Pada pin 7 dipasang sebuah resistor (R5) yang diparalel dengan
kapasitor (CIN) yang dihubungkan ke ground. Resistor (R5) diberi nilai
100k , sehingga arus bias pada pin 7 sebesar -80 nA (datasheet LM331) akan mencegah efek arus bias pada pin 6, dan juga membantu memberikan frekuensioffset yang minimum. Kapasitor CIN pada pin 7 yang dihubung
ground difungsikan sebagai filter untuk tegangan VIN. Untuk memberikan
fungsi filter yang baik, kapasitor yang digunakan sebesar 1uF. Dengan nilai kapasitor itu, maka apabila waktu konstan pada RC bersesuaian,step
tegangan VIN akan menyebabkan perubahanstep pada fOUT.
Selanjutnya untuk memberikan efek hysterisis yang membantu komparator input menhasilkan keluaran yang lebih linear 0.03%
(datasheet LM331) ditambah resistor R3 dengan nilai 47 yang dirangkai
seri dengan kapasitor CL sebesar 1uF.
Hubungan serial antara resistorR1 dengan resistor variabel R7
Besar frekuensi keluaran (fOUT ) dapat ditentukan dengan menggunakan persamaan (2-7) :
OUT
f =
t t L S IN C . R 1 x R R x v 09 . 2 V
Dengan nilai-nilai diketahui :
IN
V = 10 V (full scale),
S
R =
i V
9 . 1
; i= 135 uA (typical datasheet LM331),
S
R =
uA V 135 9 . 1
= 14074.074 14k .
L
R = 100k (datasheet LM331),
t
R = R4 = 6.8k (datasheet LM331),
t
C = 0.01uF (datasheet LM331). Maka :
OUT
f =
t t L S IN C . R 1 x R R x v 09 . 2 V OUT
f =
) uF 01 . 0 )( k 8 . 6 ( 1 x k 100 k 14 x V 09 . 2 V 10 OUT
f =9850.83Hz.
Besar frekuensi keluaran (fOUT) berubah-ubah tergantung dari
tegangan VIN. Dengan menggunakan persamaan (2-7), besar frekuensi
Berikut adalah tabel frekuensi keluaran (fOUT) berbanding dengan variasi tegangan VIN :
Tabel 3.1 Perbandingan fOUT dengan VIN
IN
V (V) fOUT(Hz) T(ms)
10 9850,83 0.1015
9 8865,747 0.1128 8 7880,664 0.1269 7 6895,581 0.1450 6 5910,498 0.1692 5 4925,415 0.2030 4 3940,332 0.2538 3 2955,249 0.3384 2 1970,166 0.5076 1 985,083 1.0172
0 0
3.2.4 HubunganV-to-F Converterdan Mikrokontroler AVR Attiny2313 Gambar 3.8 adalah hubungan rangkaian Voltage-to-Frequency
Converter (LM 331) dengan mikrokontroler. Port mikrokontroler yang
R1 6K8 R S R15 47 DB7 R12 10K U1B 74LS14 3 4 DB6 R10 12K R 2 12K
C2 = 22PF1
R 8 47 C4 10u U3 LM131 1 2 3 4 6 5 7 8
I Out I Ref f Out GN D THRES R/C COMP Out VCC C1 0,1
C3 = 22PF1
R11 5K 1 3 2 DB1 C 2 0,01 R7 22K U1A 74LS14 1 2 VCC R6 1M 1 3 2 U 4 LM131 1 2 3 4 6 5 7 8
I Out I Ref f Out GND
THRES R/C COMP Out VC C C 5 0,1 R13 1M 1 3 2 U2 ATTiny 2313 1 4 5 20 12 13 14 15 16 17 18 19 2 3 6 7 8 9 11 RESET XTAL2 XTAL1 VCC PB0/AIN0 PB1/AIN1 PB2 PB3/OC1 PB4 PB5/MOSI PB6/MISO PB7/SC K PD0/RXD PD1/TXD PD2/INTO PD3/INT1 PD4/TO PD5/T1 PD6/ICP DB0 U1C 74LS14 5 6 J 3 Vin REV 1 2 R14 22K DB2 R 9 6K8 VCC DB4 R 4 10K C7 1u R 3 5K 1 3 2 DB3 DB5 VCC J 1
Vin FWD 1 2 Y1 CRY STAL U1D 74LS14 9 8 VCC R 5 100K SW1
SW PUSHBUTTON
E VCC C 3 1u C6 0,01 VCC
Gambar 3.8AntarmukaV-to-F Converterdan Mikrokontroler
3.2.5 Antarmuka LCD dan Mikrokontroler AVR Attiny2313
Gambar 3.9 adalah antarmuka mikrokontroler dengan LCD. Port
mikrokontroler yang digunakan adalahPort B. Port B pada mikrokontroler digunakan sebagai kaki I/O. Kaki PB.0 – PB.7 mikrokontroler terhubung dengan D0 – D7 LCD. Kaki PB.5 terhubung dengan Enable clockLCD , kaki PB.5 terhubung dengan R/S. LCD hanya difungsikan dalam kondisi tulis, jadi pada LCD kaki R/W selalu dalam kondisi low (dihubungkan denganground).
DB4 U2 ATTiny 2313 1 4 5 20 12 13 14 15 16 17 18 19 2 3 6 7 8 9 11 RESET XTAL2 XTAL1 VCC PB0/AIN0 PB1/AIN1 PB2 PB3/OC1 PB4 PB5/MOSI PB6/MISO PB7/SCK PD0/RXD PD1/TXD PD2/INTO PD3/INT1 PD4/TO PD5/T1 PD6/ICP E DB7 FWD VCC VCC RS
C3 = 22PF1
LCD 1 6 X 2 U5 LCD 1 2 3 4 5 6 7 8 9 10 11 12 13 14 GND vcc VEE RS R/W E DB0 DB1 DB2 DB3 DB4 DB5 DB6 DB7 DB2 E DB5 Y 1 4Mhz VCC
C2 = 22PF1
DB0 DB7 C4 10u DB4 DB2 DB6 DB3 DB3 DB1 DB5 DB0 DB6 RS REV DB1 SW1 RESET R4 10K
Gambar 3.9Antarmuka LCD dan Mikrokontroler
3.2.6 Sistematis Rangkaian Keseluruhan
C2 = 22PF1
DB0 VCC DB5 C5 0,1 R2 12K R6 1M 1 3 2 LC D 16 X 2 U5 LCD 1 2 3 4 5 6 7 8 9 10 11 12 13 14 GND v c c VE E RS R/W E DB0 DB1 DB2 DB3 DB4 DB5 DB6 DB7 U3 LM131 1 2 3 4 6 5 7 8 I Out I Ref f Out GND
THRES R/C COMP Out VCC R10 12K DB2 DB7 VCC U1D 74LS14 9 8 U1C 74LS14 5 6 J2
VCC 5V
1 2 VCC C7 1u C6 0,01 U1B 74LS14 3 4 C3 1u RS VCC DB5 DB7 U4 LM131 1 2 3 4 6 5 7 8 I Out I Ref f Out GND THRES R/C COMP Out VCC DB2 DB4 VCC E C2 0,01 C1 0,1 VCC E J1 Vin FWD 1 2 R12 10K DB3 DB0 DB1 VCC DB1 DB4
C3 = 22PF1
R7 22K R9 6K8 R3 5K 1 3 2 RS DB6 R5 100K R13 1M 1 3 2 R15 47 DB3 J3 Vin REV 1 2 SW1 SW PUSHBUTTON R14 22K R1 6K8 U1A 74LS14 1 2 R8 47 R11 5K 1 3 2 U2 ATTiny2313 1 4 5 20 12 13 14 15 16 17 18 19 2 3 6 7 8 9 11 RESET XTAL2 XTAL1 VCC PB0/AIN0 PB1/AIN1 PB2 PB3/OC1 PB4 PB5/MOSI PB6/MISO PB7/SCK PD0/RXD PD1/TXD PD2/INTO PD3/INT1 PD4/TO PD5/T1 PD6/ICP C4 10u R4 10K VCC DB6 Y1 CRYSTAL
3.3 Perancangan Perangkat Lunak 3.3.1 Diagram Alir Program Utama
Program Utama dari rangkaian mikrokontroler adalah bagaimana proses awal inisialisasi, pengambilan data analog sabagai keluaran dari LM 331, proses pengolahan data dan penghitungan nilai SWR, dan proses menampilkan ke LCD. Selengkapnya dapat dilihat pada gambar 3.11
3.3.2 Diagram Alir Pengambilan Data
Keluaran dari LM331 adalah frekuensi. Frekuensi adalah jumlah pulsa yang tejadi dalam satu detik. Mikrokontroler mampu mengenali frekuensi dalam bentuk pulsa periodik.
Proses pengambilan data dilakukan dengan mengatur Timer1 sebagai pewaktu 1 detik. Selanjutnya setelah 1 detik interupsi Timer1 overflow akan aktif. Pada saat interupsi ini dilakukan pembacaan jumlah counter pulsa dari INT0 (untuk forward) dan INT1 (untuk reverse). Selengkapnya dapat dilihat pada gambar 3.12
3.3.3 Diagram Alir Penghitungan SWR
Gambar 3.13 Diagram alir penghitungan SWR
3.3.4 Diagram Alir Aktifkan LCD
52
Pada bab ini berisi tentang hasil perancangan SWR Meter dan Power Meter
digital berbasis mikrokontroler AVR Attiny2313 dan pembahasan data hasil
pengamatan dan pengukuran.
4.1
Proses Kalibrasi Alat Ukur
Untuk mendapatkan pengukuran yang baik, alat ukur harus dikalibrasi terlebih
dahulu. Metode untuk kalibrasi alat ukur dilakukan dengan membandingkan dengan
alat ukur acuan yaitu SWR dan Power Meter Analog SX-200 Diamond Antena.
Hubungan proses kalibrasi dapat dilihat pada gambar 4.1
Gambar 4.1 Hubungan proses kalibrasi alat ukur
Proses kalibrasi adalah sebagai berikut :
1. Hubungkan SWR dan Power meter yang akan dikalibrasi diantara TX
(Pemancar), SWR dan Power Meter analog SX-200 Diamond Antena dan
antena (
dummy load
) pada konektor yang sesuai (TX ke pesawat, ANT ke
2. Letakkan VU Meter pada masing-masing titik maju (FWD) dan titik balik
(REV), lalu nyalakan pesawat TX (pemancar) sehingga jarum pada
masing-masing VU meter akan menunjuk ke suatu angka. Lalu aturlah VR
(potensiometer) sehingga jarum pada titik maju (FWD) mencapai skala
maksimum, dan jarum pada titik balik (REV) menunjuk ke suatu angka.
3. Balik posisi SWR meter. TX (pemancar) ke antena (
dummy load
) dan pesawat
ke ANT, lalu ulangi langkah 2 sampai jarum harus menunjuk angka yang
sama.
Gambar 4.2 Hubungan Kalibrasi alat ukur
4.2
Data Kalibrasi Alat Ukur
Dengan melakukan kalibrasi alat ukur maka akan didapatkan data
Sebelum mencari data kalibrasi, pemancar harus diatur terlebih dulu
supaya daya keluaran maksimal adalah sebesar 10 Watt sesuai dengan
perancangan awal. Setelah didapatkan daya pancar keluaran maksimal sebesar
10 Watt, maka besar nilai SWR untuk perubahan kenaikan daya pancar
keluaran dari 1 Watt sampai 10 Watt pada SWR dan Power Meter analog
SX-200 Diamond Antena dapat langsung dilihat dengan mengatur posisi saklar
pada fungsi pengukuran SWR. Data untuk kalibrasi seperti pada tabel 4.1
dibawah :
Tabel 4.1 Data Kalibrasi
Daya Pemancar
(Watt)
SWR10
1,10
9
1,10
8
1,10
7
1,10
6
1,09
5
1,09