TUGAS AKHIR
PENGUKUR TINGGI BADAN MENGGUNAKAN
ULTRASONIK BERBASIS MIKROKONTROLER AT89S51
DENGAN TAMPILAN YANG MENGIKUTI KETINGGIAN
OBYEK
Diajukan Untuk Memenuhi Salah Satu Syarat Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
Disusun oleh:
ERIK HARDIANTO
NIM: 015114065
PROGRAM STUDI TEKNIK ELEKTRO
JURUSAN TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
FINAL PROJECT
THE BODY HEIGHT METRE USING ULTRASONIC BASED
ON AT89S51 MICROCONTROLER WITH DISPLAY
FOLLOWING THE OBJECT HEIGHT
Presented as Partial Fulfillment of the Requirements To Obtain The Technical Engineering Degree
In Electrical Engineering
By:
ERIK HARDIANTO
Student ID Number: 015114065
ELECTRICAL ENGINEERING STUDY PROGRAM
ELECTRICAL ENGINEERING DEPARTMENT
SCIENCE AND TECHNOLOGY FACULTY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
2007
MOTTO DAN PERSEMBAHAN
Dengarkanlah didikan, maka kamu menjadi bijak,
janganlah mengabaikannya
(Amsal 8:33)
sabar memikul beban
sabar menanggung gagal
sabar melihat keberhasilan orang lain
sabar menunggu
ku persembahkan karya kecilku ini untuk :
Tuhan Jesus Kristus atas segala kasih dan kebaikan-Nya
Ayah ibuku juga adek-adekku tercinta yang senantiasa mendoakan
dan mengasihi aku serta Diani D.A pendampingku yang setia.
Pernyataan Keaslian Karya
Saya menyatakan dengan sesungguhnya bahwa tugas akhir yang saya tulis ini
tidak memuat karya atau bagian karya orang lain kecuali yang telah disebutkan
dalam daftar pustaka sebagaimana layaknya sebuah karya tulis.
Yogyakarta, _________________2007
Penulis
Erik Hardianto
Kata Pengantar
Puji syukur penulis panjatkan kehadirat Tuhan Yesus Kristus, atas berkat dan kasih Nya penulis dapat menyelesaikan tugas akhir dengan judul “Pengukur Tinggi Badan Menggunakan Ultrasonik Berbasis Mikrokontroler AT89S51 Dengan Tampilan Yang Mengikuti Ketinggian Obyek”.
Maksud dan Tujuan dari pembuatan tugas akhir ini untuk memenuhi syarat kelulusan di program strata-1 Jurusan Teknik Elektro Fakultas Sains dan Teknologi Universitas Sanata Dharma. Penulis menyadari bahwa tugas akhir ini dapat terselesaikan tidak terlepas dari bantuan beberapa pihak. Sehubungan dengan hal tersebut, maka pada kesempatan ini penulis ingin menyampaikan ucapan terima kasih kepada:
1. Bapak B.Djoko Untoro Suwarno, S.Si., MT. Sebagai pembimbing I yang telah memberi ide, saran dan motivasi dalam pembuatan Tugas Akhir ini. 2. Bapak Ir.Tjendro sebagai pembimbing II yang telah memberikan bimbingan
dalam penulisan Tugas Akhir.
3. Seluruh dosen jurusan Teknik Elektro Universitas Sanata Dharma yang telah mengajar dan mendidik penulis selama belajar di jurusan Teknuk Elektro USD.
4. Laboran di laboratorium Teknik Elektro ( mas broto, mas suryo, mas mardi) atas kemudahan dalam peminjaman alat-alat laboratorium.
5. Ayah dan ibu atas segala dukungan moril maupun materialnya selama penulis kuliah.
6. Adikku Emanuel atas motivasi dan ceramahannya yang selalu menguatkan penulis, adikku Elvian atas kritik dan motivasi agar penulis cepat menyelesaikan studi.
7. Pendampingku Diani D.A yang selalu ada buat penulis atas motivasi, saran dan kritiknya selama penulis mengerjakan tugas akhir.
8. Sepupuku puguh atas saran dan ide dalam pembuatan alat, mas totos atas kesediaannya berbagi kamar dengan penulis.
9. Temanku jono dan eling atas pinjaman komputer dan printer untuk menyelesaikan tulisan tugas akhir.
10. Rekan-rekan mahasiswa Teknik Elektro USD angkatan 2001 yang tidak bisa penulis sebutkan satu persatu atas dorongan dan motivasinya agar penulis cepat menyelesaikan tugas akhir.
Penulis menyadari bahwa dalam menyusun tugas akhir ini masih terdapat kekurangan, baik dalam segi penyajian dan penulisan materi maupun dalam penganalisaan materi sebagai suatu karya ilmiah. Hal ini disebabkan oleh keterbatasan kemampuan serta pengetahuan penulis. Oleh sebab itu penulis sangat mengharapakan kritik atau saran yang bersifat membangun dari semua pihak.
Akhir kata penulis berharap semoga apa yang diuraikan dalam tulisan tugas akhir ini berguna bagi pembaca.
Yogyakarta, 2007
Penulis
DAFTAR ISI
HALAMAN JUDUL ... i
HALAMAN JUDUL (INGGRIS) ... ii
HALAMAN PERSETUJUAN ... iii
HALAMAN PENGESAHAN ... iv
HALAMAN MOTTO DAN PERSEMBAHAN ... v
PERNYATAAN KEASLIAN KARYA ... vi
KATA PENGANTAR ... vii
DAFTAR ISI ... ix
DAFTAR GAMBAR DAN TABEL ... xii
DAFTAR LAMPIRAN ... xiv
INTISARI ... xv
ABSTRACT ... xvi
BAB I. PENDAHULUAN ….. ... 1
I.1 Judul ... 1
I.2 Latar Belakang ... 1
I.3 Perumusan Masalah ... 2
I.4 Pembatasan Masalah ... 2
1.5 Tujuan dan Manfaat ... 2
I.6 Metode Penelitian ... 3
I.7 Sistematika Penulisan ……… 3
BAB II. DASAR TEORI ... 5
2.1 Ultrasonik ... 5
2.1.1 Prinsip Pengukuran Dengan Ultrasonik ... 5
2.1.2 Tranduser Ultrasonik ... 9
2.2 Pemancar Gelombang Ultrasonik ... 10
2.2.1 Rangkaian Pembangkit Pulsa………... 10
2.2.2 Rangkaian Buffer Pada Pemancar Ultrasonik ……… 12
2.3 Penerima Gelombang Ultrasonik ... 13
2.3.1 Penguat Penerima ... 13
2.3.2 Detektor Puncak ke Puncak(peak-to-peak detector)……... 17
2.3.3. Pembanding Tegangan ……….. 19
2.4 Mikrokontroler AT89S51 ………. 20
2.4.1 Organisasi Memori AT89S51………..…… 20
2.4.2. Memori Program……… 21
2.4.3. Memori Data……….. 21
2.4.4. Register Fungsi Khusus (Special Function Register)…… 22
2.4.5. Pemrograman Mikrokontroler……… 25
2.4.6. Mode Pengalamatan pada Mikrokontroler………. 25
2.4.7. Instruksi pada Mikrokontroler……… 26
2.4.8. Rangkaian Oscillator……….. 27
2.5 Piranti Penampil……… 27
2.6 Motor DC………. 29
2.7 IC L293D………. 30
2.8 Sensor Putaran ……… 30
BAB III PERANCANGAN ALAT………... 32.
3.1 Perangkat Keras (Hardware)……….. 33
3.1.1 Pemancar Gelombang Ultrasonik……….………….. 33
3.1.1.1 Osilator……… 33
3.1.1.2 Buffer……….. 35
3.1.2 Rangkaian Penerima Gelombang Ultrasonik………. 36
3.1.3 Sensor Putaran……… 38
3.1.4. Roda Cacah (Rotary Encoder)………... 39
3.2 Perancangan Perangkat Lunak (Software)………..…… 40
BAB IV HASIL DAN PEMBAHASAN………... 44
4.1 Mekanisme Pengambilan Data…………..………. 44
4.2 Analis Data Hasil Pengukuran ……….. 45
4.3 Analisis Perubahan Suhu ………... 46
4.4 Analisis Perangkat Lunak (Software) ……… 47
4.5 Analisis Rangkaian ……… 55
BAB V. KESIMPULAN DAN SARAN ……….. 58
5.1 Kesimpulan……….... 58
5.2 Saran……….. 59
DAFTAR PUSTAKA ……….. 60
LAMPIRAN
DAFTAR GAMBAR DAN TABEL
Daftar Gambar
Gambar 2.1 Prinsip kerja Pengukuran Jarak dengan Tranduser Ultrasonik… 6
Gambar 2.2 Penempatan tranduser ultrasonik ... 7
Gambar 2.3 Bahan Penyusun Tranduser Ultrasonik ... 9
Gambar 2.4 Konstruksi Tranduser Ultrasonik ... 9
Gambar 2.5 Rangkaian Pembangkit Pulsa ... 10
Gambar 2.6 Rangkaian Buffer pada pemancar ultrasonik ... 12
Gambar 2.7 Rangkaian penguat penerima ... 13
Gambar 2.8 Rangkaian penguat untuk analisis DC ... 13
Gambar 2.9 Rangkaian penguat untuk analisis AC ... 14
Gambar 2.10 Rangkaian Penjepit Positif ... 17
Gambar 2.11 Prinsip Kerja Rangkaian Penjepit Positif ... 17
Gambar 2.12 Rangkaian Peak-to-Peak Detector ... 18
Gambar 2.13 Rangkaian Pembanding Tegangan ... 19
Gambar 2.14 Memori data dan memori program pada mikrokontroler AT89S51 ………... 20
Gambar 2.15 Peta memori dan metode untuk mengaksesnya ... 21
Gambar 2.16 Peta memori SFR AT89S51 ... 22
Gambar 2.17 Rangkaian oscillator ... 27
Gambar 2.18 Display LCD 2 × 16 karakter ... 27
Gambar 2.19 Simbol motor DC ... 29
Gambar 2.20 IC L293D ... 30
Gambar 2.21. Rangkaian Optocoupler ... 30
Gambar 3.1 Diagram kotak rancangan pengukur tinggi badan menggunakan tranduser ultrasonik ... 31
Gambar 3.2 Blok Pemancar ... 32
Gambar 3.3 Osilator menggunakan NE555 ... 32
Gambar 3.4 Transistor 9013 sebagai saklar ... 34
Gambar 3.5. Roda Cacah (Rotary Encoder) ... 39
Gambar 3.6 Diagram alir program pengukur tinggi badan ... 40
Gambar 3.7 Ilustrasi tunda waktu Tx dan Rx (pemancar dan penerima) ... 41
Gambar 4.1 Tunda waktu dari pemancar ke penerima ... 44
Gambar 4.2 Grafik hubungan antara Error dan Tinggi badan ……… 46
Gambar 4.3 Inisialisasi Timer ……… 48
Gambar 4.4 Kondisi Tranduser aktif ……….. 49
Gambar 4.5 Kondisi Timer : (a) saat akan memancarkan sinyal, (b) setelah memancarkan sinyal 10 kali ………..….. 49
Gambar 4.6 Kondisi Timer saat menerima sinyal ………. 50
Gambar 4.7 Kondisi ada sinyal input dan tranduser pemancar non aktif ….. 50
Gambar 4.8 Kondisi IRAM sebelum perkalian ………. 51
Gambar 4.9 Simulasi IRAM untuk pembagi 100000 ……… 52
Gambar 4.10 Simulasi IRAM untuk perkalian 347 m/s ……….. 53
Gambar 4.11 Simulasi IRAM untuk pembagi 2 ……….. 54
Gambar 4.12 Simulasi hasil pembagian 2 ………... 54
Gambar 4.13 Gelombang keluaran pada pemancar ………..……… 56
Daftar Tabel Tabel 2.1 Hubungan antara tinggi badan dengan jeda waktu gelombang ultrasonik……… 8
Tabel 2.2 Pin LCD ... 29
Tabel 4.1 Data pengukuran pada suhu 25°C dan 28°C ……… 47
Tabel 4.2 Perbandingan data hasil simulasi dengan perhitungan…………. 55
Tabel 4.3 Perbandingan frekuensi hasil perancangan dan pengukuran ….. 56
Tabel 4.4 Perbandingan penguatan pada perancangan dan pengukuran ….. 57
DAFTAR LAMPIRAN
Lampiran A. Gambar Rangkaian Pemancar Ultrasonik Gambar Rangkaian Penerima Ultrasonik Gambar Rangkaian Mikrokontroler
Gambar Alat Ukur Tinggi Badan dan Penempatan Tranduser Ultrasonik
Lampiran B. Data Hasil Pengukuran
Lampiran C. Contoh Potongan Program Pengukur Tinggi Badan Lampiran D. Data Sheet Tranduser Ultrasonik
Data Sheet IC Timer 555 Data Sheet IC CD4049UBC Data Sheet 2N3904
PENGUKUR TINGGI BADAN MENGGUNAKAN
ULTRASONIK BERBASIS MIKROKONTROLER AT89S51
DENGAN TAMPILAN YANG MENGIKUTI KETINGGIAN
OBYEK
Oleh
Erik Hardianto 015114065
INTISARI
Pada prinsipnya mengukur adalah membandingkan besaran yang belum diketahui besarnya dengan besaran yang telah terkalibrasi. Ada beberapa cara untuk mengukur tinggi badan salah satunya adalah memanfaatkan tranduser ultrasonik. Tranduser ultrasonik yang digunakan bekerja pada frekuensi 40 KHz yang tidak menggangu pendengaran manusia.
Prinsip pengukuran tinggi badan menggunakan tranduser ultrasonik adalah sebagai berikut:Pulsa ultrasonik yang merupakan sinyal gelombang ultrasonik dikirimkan dari pemancar gelombang ultrasonik, ketika gelombang ultrasonik mengenai obyek, gelombang ini dipantulkan dan diterima kembali oleh penerima gelombang ultrasonik.Dengan mengukur tunda waktu antara saat pulsa dikirim dan pulsa pantul diterima, tinggi badan bisa dihitung. Proses perhitungan dilakukan oleh mikrokontroler AT89S51 dan hasil pengukuran tersebut ditampilkan menggunakan LCD. Untuk mempermudah LCD dibuat bisa bergerak naik-turun mengikuti ketinggian obyek yang diukur. Untuk menggerakkan LCD, digunakan motor DC sebagai penggerak.
Pengukur tinggi badan yang dibuat mampu mengukur tinggi badan dari 100 cm sampai dengan 190 cm, dengan kenaikan ketinggian 1 cm. Hasil pengukuran dipengaruhi oleh: suhu, media pantul serta posisi tranduser pemancar dan penerima ultrasonik.
Kata kunci: Pengukur tinggi badan, tranduser ultrasonik, tunda waktu
xvi
THE BODY HEIGHT METRE USING ULTRASONIC BASED
ON AT89S51 MICROCONTROLER WITH DISPLAY
FOLLOWING THE OBJECT HEIGHT
By
Erik Hardianto 015114065
ABSTRACT
Basically, measuring is comparing a unit, which still unknown its value, with a unit that its value has been calibrated. There’s some method to measure the body high the onther is advantageous the ultrasonic tranduce. The ultrasonic tranduce in use work at frequency 40 KHz, so that can’t distrub the human sence of hearing.
The principle of measuring the body height with ultrasonic tranducer is like this: ultrasonic pulse in form of ultrasonic waves ws sent from ultrasonic wave transmitter, and when the ultrasonic wave hit object, the wave reflected received by ultrasonic wave receiver. By counting time delay between times when a pulse sent and received, the body high can be calculated. The measuring process was all done by AT89S51 microcontroler, and the result displayed on an LCD. For make it simple, LCD makes moving up and down following the object highest. To move the LCD, used DC motor as motored.
The body high metre made use to measure from 100 cm until 190 cm, with 1 cm high increase. However, the measurement result affected by temperature, rebound media and ultrasonic transmitter/receiver tranducer position.
BAB I
PENDAHULUAN
1.1 Judul
Pengukur Tinggi Badan Menggunakan Ultrasonik Berbasis Mikrokontroler AT89S51 Dengan Tampilan Yang Mengikuti Ketinggian Obyek.
1.2 Latar Belakang
Kemajuan ilmu pengetahuan dan teknologi dari waktu ke waktu semakin pesat. Peralatan dalam segala bidang yang selama ini dioperasikan secara manual telah banyak ditinggalkan dan digantikan dengan peralatan yang dioperasikan secara otomatis. Hal ini bertujuan untuk memudahkan manusia dalam mengoperasikannya.
Perkembangan dunia elektronika yang salah satunya mencangkup bidang mikro sangat mendukung terciptanya peralatan yang dapat dioperasikan secara otomatis. Dengan memanfaatkan teknologi elektronis secara mikro tersebut maka penulis mencoba membuat suatu alat ukur tinggi badan dengan berbasiskan mikrokontroler. Peralatan ini diharapkan akan dapat memberikan kemudahan bagi manusia dalam mengukur tinggi badan. Keperluan pengukuran tinggi badan digunakan sebagai informasi berapa tinggi badan seseorang, informasi ini biasanya diperlukan sebagai suatu catatan.
Dengan latar belakang itulah maka penulis merancang suatu alat yang mempermudah orang dalam melakukan pengukuran ketinggian badan. Dimana pengukuran tinggi badan ini memanfaatkan pantulan gelombang sebagai media ukur, syarat gelombang yang digunakan yaitu gelombang yang memiliki kecepatan rambat yang konstan. Karena adanya syarat tersebut maka penulis menggunakan gelombang ultrasonik karena gelombang ultrasonik mempunyai kecepatan yang relatif konstan dan dimungkinkan diukur selang waktunya untuk jarak yang dekat. Gelombang ultrasonik digunakan juga karena kecepatan rambatnya yang tidak terlalu tinggi, sehingga mudah untuk menghitung waktu
tundanya. Dengan frekuensi gelombang ultrasonik 40 KHz, maka dalam penggunaannya gelombang ini tidak mengganggu sistem pendengaran manusia.
1.3 Perumusan Masalah
Pengukuran tinggi badan menggunakan ultrasonik ini memanfaatkan pantulan gelombang ultrasonik. Tinggi badan diketahui dengan cara menghitung selang waktu antara saat gelombang ultrasonik dikirim dan saat gelombang ultrasonik diterima. Pengirim dan penerima gelombang ultrasonik dilakukan oleh dua tranduser ultrasonik yang memiliki fungsi yang berbeda. Selang waktu yang dihasilkan diolah oleh mikrokontroler AT89S51 dan hasil pengolahan ini yang berupa suatu ukuran tinggi badan ditampilkan oleh LCD yang bergerak mengikuti ketinggian obyek yang diukur sehingga memudahkan dalam pembacaannya.
I.4 Pembatasan Masalah
Alat ukur tinggi badan ini dibuat setinggi 2 m dengan jarak ukur maksimal 100 cm dan jarak ukur minimal 10 cm. Dimana jarak ukur ini merupakan jarak antara tranduser dengan obyek Jarak ukur maksimal 100 cm berarti tinggi badan obyek setinggi 100 cm, sedangkan untuk jarak ukur minimal berarti tinggi badan obyek setinggi 190 cm. Kenaikan tinggi badan dibuat per satu centimeter.
1.5 Tujuan
dan Manfaat
1.5.1 Tujuan
Tujuan dari penelitian ini adalah untuk membuat suatu alat ukur tinggi badan yang dapat menampilkan hasil pengukuran yang bisa langsung dibaca oleh oyek yang diukur, hal ini dimungkinkan karena hasil pengukuran ditampilkan di LCD yang dapat bergerak mengikuti ketinggian obyek.
1.5.2 Manfaat
Manfaat yang dapat dicapai dari penelitian ini adalah :
1. Dengan peralatan ini diharapkan dapat memberikan kemudahan suatu pengukuran serta meningkatkan efisiensi dalam pekerjaan yang berkaitan dengan pengukuran.
2. Mengaplikasikan tranduser ultrasonik untuk pengukuran dalam suatu alat ukur.
3. Menunjukkan kelebihan suatu pengukuran dengan menggunakan mikrokontroler.
1.6 Metode Penelitian
Metode yang dipergunakan dalam penyusunan Tugas Akhir ini dapat dijelaskan dengan tahapan sebagai berikut:
1. Merencanakan rangkaian yang akan dibuat. 2. Mempelajari teori penunjang.
3. Melakukan studi literatur
4. Mengumpulkan data dengan melakukan percobaan secara langsung. 5. Melakukan diskusi dan konsultasi dengan dosen pembimbing.
1.7 Sistematika Penulisan.
Sistematika penulisan yang Penulis pergunakan dalam penyusunan Tugas Akhir ini adalah sebagai berikut:
BAB 1. PENDAHULUAN
Berisi tentang Judul, Latar Belakang, Perumusan Masalah, Pembatasan Masalah, Tujuan dan Manfaat, Metode Penelitian dan Sistematika Penulisan.
BAB 2. DASAR TEORI
Membahas tentang tranduser ultrasonik, rangkaian pemancar, rangkaian penerima, dan mikrokontroler AT89S51.
BAB 3. PERANCANGAN
Berisi diagram kotak rancangan alat pengukur tinggi badan menggunakan tranduser ultrasonik, rangkaian keseluruhan secara lengkap serta cara kerja sistem alat.
BAB 4. HASIL DAN PEMBAHASAN
Menjelaskan tentang langkah-langkah cara melakukan pangukuran dan hasil-hasil yang diperoleh berupa tabel-tabel data.
BAB 5. PENUTUP
Berisi tentang hasil kesimpulan dari seluruh tulisan yang sekaligus merupakan bab penutup dalam penulisan ini, disertai saran yang berguna untuk pengembangan dan penyempurnaan alat lebih lanjut.
BAB II
DASAR TEORI
2.1
Utrasonik
Kata “ultrasonik” berasal dari kata ultra yang berarti sesuatu yang berada di atas rata-rata dan dari kata sound yang berarti bunyi. Dengan kata lain ultrasonik merupakan suatu bunyi yang berada diatas rata-rata pendengaran manusia yang hanya mampu menangkap bunyi dengan frekuensi antara 20 Hz sampai 20 KHz .Ultrasonik merupakan bunyi diatas 20 KHz.
Gelombang ultrasonik mempunyai banyak aplikasi misalnya dalam bidang kedokteran , industri, dan lain-lain. Dalam banyak hal, gelombang ultrasonik digunakan terutama dalam hal pantulannya. Bila gelombang ultrasonik mengenai suatu rintangan atau datang pada ujung media dimana gelombang tersebut berjalan, paling tidak sebagian gelombang akan dipantulkan. Contoh pantulan adalah jika mendengar teriakan yang memantul dari jurang yang jauh yang disebut “gema”. Tidak semua energi yang dipancarkan akan sempurna dipantulkan, tetapi ada sebagian energi yang diserap oleh bahan pemantul.
2.1.1 Prinsip Pengukuran Jarak dengan Ultrasonik
Seperti yang sudah dijelaskan diatas mengenai ultrasonik, bahwa ultrasonik merupakan suatu gelombang dengan frekuensi diatas 20 KHz atau tepatnya memiliki frekuensi diantara 20 KHz sampai dengan 500 KHz. Pada frekuensi ini suara merambat dengan lurus sehingga gelombang ultrasonik lebih mudah difokuskan.
Karena ultrasonik ini merupakan gelombang suara maka gelombang ini merambat pada media udara dengan kecepatan yang sama dengan cepat rambat suara pada media udara yaitu 331 m/s pada suhu 0 ºC. Kecepatan bunyi ini besarnya tergantung dari suhu sekitaran. Persamaan dari kecepatan bunyi yang tergantung dari suhu adalah V = 331 + (0,6.T) m/s. Dari kenyataan ini maka gelombang ultrasonik banyak dikembangkan untuk mengukur jarak suatu obyek.
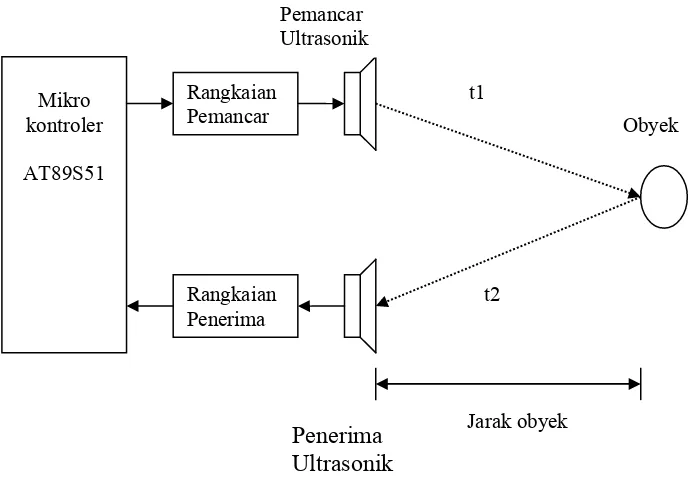
Salah satu prinsip pengukuran jarak obyek dengan ultrasonik adalah dengan memanfaatkan pantulan gelombang ultrasonik itu sendiri, seperti terlihat pada gambar 2.1 berikut
Gambar 2.1 Prinsip kerja Pengukuran Jarak dengan Tranduser Ultrasonik.
Pada saat sinyal ultrasonik dipacarkan oleh tranduser ultrasonik, sinyal tersebut suatu saat akan dipantulkan oleh obyek benda padat yang menghalanginya. Selanjutnya sinyal pantulan akan diterima tranduser lain yang berfungsi sebagi penerima, dengan menghitung tunda waktu antara saat sinyal dipancarkan dan sinyal diterima kembali oleh tranduser ultrasonik dapat diketahui jarak antara tranduser dengan benda yang memantulkan sinyal tersebut.
Jarak antara tranduser dengan obyek pemantul bisa dihitung dengan rumus:
L = V x T/2 ...(2-1) Dengan : L : jarak antara tranduser dengan obyek pemantul.
V : kecepatan bunyi di udara.
T : selisih waktu antara saat sinyal dipancarkan dengan saat sinyal diterima kembali oleh tranduser (t1 + t2)
Mikro kontroler
AT89S51
Rangkaian Pemancar
Rangkaian Penerima
Pemancar Ultrasonik
t1
Obyek
t2
Jarak obyek
Penerima Ultrasonik
Karena selisih waktu yang diperoleh pada pengukuran merupakan waktu yang diperlukan sinyal ultrasonik dihitung dari saat sinyal meninggalkan tranduser sampai dengan sinyal itu diterima kembali oleh tranduser, maka pada selisih waktu tersebut sinyal telah menempuh 2 kali jarak tranduser dengan benda. Untuk menghitung jarak yang sebenarnya, hasil penghitung selisih waktu tersebut dibagi 2.
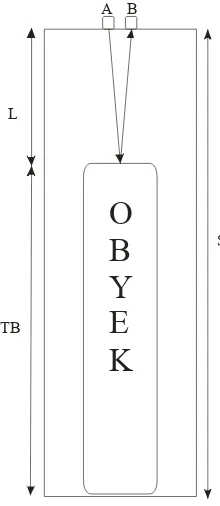
Prinsip kerja pengukuran jarak tersebut digunakan untuk pengukuran tinggi badan pada pembuatan proposal tugas akhir ini. Tinggi badan diukur dari telapak kaki sampai ujung kepala pada alat pengukur tinggi badan. Ilustrasi mengenai tinggi badan pada alat pengukur dan penempatan tranduser ultrasonik dapat dilihat pada gambar 2.2 dibawah ini:
O
B
Y
E
K
S L
TB
A B
Gambar 2.2 Penempatan tranduser ultrasonik Keterangan gambar 2.2 : A = tranduser ultrasonik sebagai pemancar
B = tranduser ultrasonik sebagai penerima L = jarak ultrasonik dengan obyek ukur TB = tinggi obyek ukur / tinggi badan S = tinggi alat ukur
Untuk memperoleh tinggi badan yang diukur (TB) ini,maka tinggi alat ukur (S) dikurangkan dengan jarak tranduser dengan obyek ukur (L), sehingga dapat diperoleh persamaan 2-2
TB = S – L ... ...(2-2)
Tabel 2.1 Hubungan antara tinggi badan dengan jeda waktu gelombang ultrasonik
TB (cm) L (cm) Tteori (ms) TB (cm) L (cm) Tteori (ms) TB (cm) L (cm) Tteori (ms)
190 10 0.575 159 41 2.357 128 72 4.14
189 11 0.632 158 42 2.415 127 73 4.197
188 12 0.69 157 43 2.472 126 74 4.255
187 13 0.747 156 44 2.53 125 75 4.312
186 14 0.805 155 45 2.587 124 76 4.37
185 15 0.862 154 46 2.645 123 77 4.427
184 16 0.92 153 47 2.702 122 78 4.485
183 17 0.977 152 48 2.76 121 79 4.542
182 18 1.035 151 49 2.817 120 80 4.6
181 19 1.092 150 50 2.875 119 81 4.657
180 20 1.15 149 51 2.932 118 82 4.715
179 21 1.207 148 52 2.99 117 83 4.772
178 22 1.262 147 53 3.047 116 84 4.83
177 23 1.322 146 54 3.105 115 85 4.887
176 24 1.38 145 55 3.162 114 86 4.945
175 25 1.437 144 56 3.22 113 87 5.002
174 26 1.495 143 57 3.277 112 88 5.06
173 27 1.552 142 58 3.335 111 89 5.117
172 28 1.61 141 59 3.392 110 90 5.175
171 29 1.667 140 60 3.45 109 91 5.232
170 30 1.725 139 61 3.507 108 92 5.29
169 31 1.782 138 62 3.565 107 93 5.347
168 32 1.84 137 63 3.622 106 94 5.405
167 33 1.897 136 64 3.68 105 95 5.462
166 34 1.955 135 65 3.737 104 96 5.52
165 35 2.012 134 66 3.795 103 97 5.577
164 36 2.07 133 67 3.852 102 98 5.635
163 37 2.127 132 68 3.91 101 99 5.692
162 38 2.185 131 69 3.967 100 100 5.75
161 39 2.242 130 70 4.025
160 40 2.3 129 71 4.082
Tunda waktu pada tabel 2.1 dihitung menggunakan persamaan 2-1 dengan V = 347,8 m/s pada suhu 28°C, dengan tinggi alat ukur 200 cm.
2.1.2 Tranduser Ultrasonik
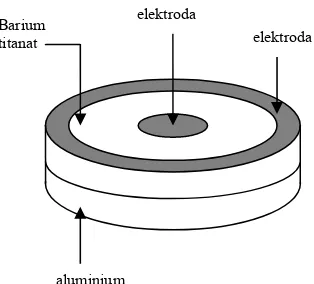
Tranduser diartikan sebagai suatu piranti yang dapat mengubah isyarat dari satu besaran fisis ke besaran fisis lain. Tranduser ultrasonik adalah piranti elektronik yang berfungsi untuk mengubah besaran listrik menjadi besaran mekanis yang berupa gelombang ultrasonik ( sebagai pemancar) dan sebaliknya dapat juga mengubah sinyal ultrasonik menjadi arus listrik (sebagai penerima). Tranduser ultrasonik dibuat dari barium titanat yang bekerja berdasarkan efek piezoelectric, struktur bahan penyusunnya dapat dilihat pada gambar 2.3. Prinsip kerjanya adalah pada saat barium titanat ditempatkan diantara 2 lempeng penghantar dan kemudian lempeng penghantar itu diberi tegangan dengan polarisasi yang sama dengan potensial polarisasi barium titanat maka barium
titanat akan memendek. Jika beda potensial yang diberikan pada lempeng
penghantar berlawanan dengan potensial polarisasinya maka barium titanat akan memanjang.
Prinsip piezoelectric ini juga berlaku sebaliknya yaitu saat tranduser dipergunakan untuk menerima gelombang ultrasonik. Kompresi gelombang mekanik pada bariumtitanat akan menghasilkan potensial listrik yang berlawanan dengan potensial polarisasinya.
Barium elektroda
elektroda
aluminium titanat
Gambar 2.3 Bahan Penyusun Tranduser Ultrasonik
Dari konstruksi tranduser ultrasonik seperti pada gambar 2.4 terlihat bahwa untuk menguatkan getaran dari barium titanat maka lempeng aluminium dibuat dengan permukaan luas. Dengan permukaan yang luas tersebut akan dihasilkan amplitudo gelombang yang besar.
Bahan barium titanat sendiri memiliki frekuensi karakteristik alami sebesar kurang lebih 40 KHz sehingga tranduser tidak peka terhadap sinyal yang frekuensinya jauh dari 40 KHz. Bahan ini juga memiliki sensitivitas yang lebih tinggi jika dibandingkan bahan kristal lain seperti kristal kuarsa (Quartz) dan garam Rochelle tetapi stabilitas frekuensi dari barium titanat lebih rendah jika dibandingkan kedua bahan kristal yang lain.
Gambar 2.4 Konstruksi Tranduser Ultrasonik
2.2 Pemancar Gelombang Ultrasonik
Pemancar gelombang ultrasonik terdiri dari dua bagian, yaitu: rangkaian pembangkit pulsa dan rangkaian buffer untuk memperkuat sinyal.
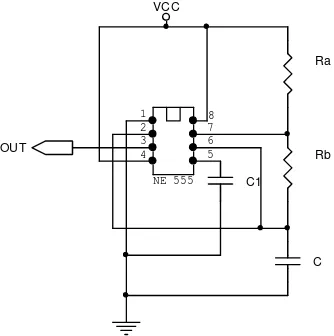
2.2.1 Rangkaian Pembangkit Pulsa
Untuk membangkitkan suatu frekuensi tertentu maka dibutuhkan suatu pembangkit frekuensi yang sering disebut dengan oscillator. Rangkaian pembangkit pulsa disusun dengan satu IC tunggal yaitu IC NE555,seperti pada gambar 2.5. Rangkaian 555 ini bekerja sebagai multivibrator astabil yang frekuensi keluarannya yang ditentukan oleh Ra,Rb dan C. Bentuk keluaran osilator adalah gelombang kotak yang dipengaruhi oleh waktu pengisian dan
pengosongan kapasitor, sehingga osilator mempunyai tegangan yang naik dan turun secara ekspionensial.
OUT NE 555 1 2 Ra 3 C 4 5 6 7 8 VCC C1 Rb
Gambar 2.5 Rangkaian Pembangkit Pulsa.
Selang waktu pengisian dan pengosongan kapasitor dapat dijelaskan sebagai berikut:
Selang waktu keadaan tinggi saat C terisi dari 1/3 Vcc sampai 2/3 Vcc melalui (Ra+Rb) diberikan oleh persamaan:
ttinggi= 0,693(Ra+Rb)C ... (2-3) Selang waktu keadaan rendah saat C mulai dikosongkan dari 2/3 Vcc sampai 1/3 Vcc. Karena waktu pengosongan kapasitor dipengaruhi oleh Rb, maka dapat dituliskan:
trendah= 0,693(Rb)C ... (2-4) Jadi total periode keluarannya adalah:
T = ttinggi +trendah= 0,693(Ra + 2Rb)C ... (2-5) Perbandingan waktu sinyal keluaran terhadap perioda total disebut dengan siklus kerja (duty cycle). Perbandingan waktu bila keluaran tinggi terhadap perioda dalam bentuk persamaan dituliskan sebagai berikut:
100% ) 2 ( 693 , 0 ) ( 693 , 0 x C Rb Ra C Rb Ra D + + = 100% 2Rbx Ra Rb Ra D + +
= ... (2-6)
Frekuensi osilasi adalah: C Rb Ra T f ) 2 ( 693 , 0 1 1 + = = C Rb Ra T f ) 2 ( 44 , 1 1 + =
= ... (2-7)
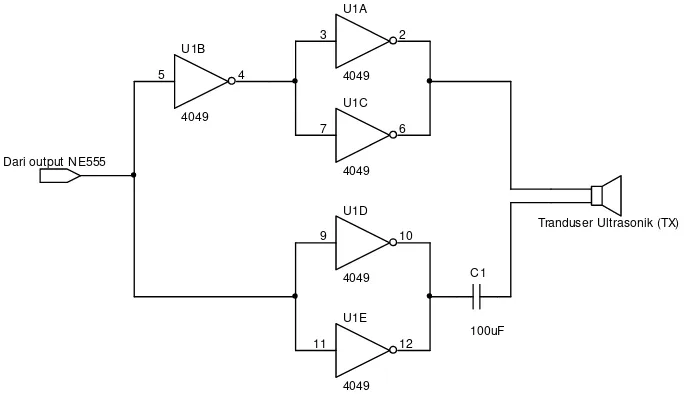
2.2.2 Rangkaian Buffer Pada Pemancar Ultrasonik
Rangkaian gate 4049 merupakan buffer untuk pemancar sinyal ultrasonik, IC CD4049 merupakan IC CMOS inverter. Untai buffer terdiri dari susunan gerbang not (inverter) CMOS CD4049 yang ditunjukkan pada gambar 2.6. Gerbang not U1B berfungsi untuk membalik fase sehingga tegangan output pada paralel gerbang not U1A dan U1C akan selalu berlawanan dengan tegangan output pada paralel gerbang not U1D dan U1E, dengan demikian amlitudo gelombang persegi yang diunpankan pada pemancar ultrasonik menjadi dua kali lipat dari amplitudo semula. Capasitor berfungsi untuk menahan arus DC yang akan masuk ke tranduser ultrasonik, karena arus DC bisa mengakibatkan kerusakan pada tranduser ultrasonik,sehingga hanya sinyal ultrasonik saja yang bisa masuk ke tranduser ultrasonik.
Tranduser Ultrasonik (TX) U1C
4049
7 6
Dari output NE555
U1D 4049 9 10 U1B 4049 5 4 U1A 4049 3 2 C1 100uF U1E 4049 11 12
Gambar 2.6 Rangkaian Buffer pada pemancar ultrasonik
2.3 Penerima Gelombang Ultrasonik
2.3.1. Penguat Penerima
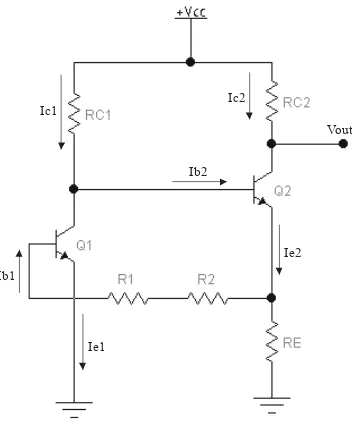
Penguat penerima ini berfungsi untuk menguatkan getaran listrik dari tranduser yang menerima getaran pantulan. Penguat menggunakan transistor bipolar dan disusun bertingkat agar didapatkan penguatan tegangan atau gain ( ) yang besar. Rangkaian penguat yang dipakai seperti terlihat pada gambar 2.7.
V
A
Getaran mekanis yang diterima oleh tranduser diubah menjadi getaran listrik. Getaran listrik ini mengalami penguatan secara bertahap, yaitu oleh transistor 1 (Q1) kemudian transistor 2 (Q2). R1 dan R2 digunakan sebagai umpan balik dan memberi arus basis pada transistor 1 (Q1). Pemberian kapasitor 1 (C1) digunakan agar sinyal AC dari emitor transistor 2 tidak ikut masuk kebasis transistor 1, sedangkan C2 digunakan sebagai blok kapasitor agar sinyal yang ada sebelum kapasitor dapat masuk kebasis transistor Q1 tanpa adanya tegangan dc yang berasal dari tranduser ultrasonik.Penguatan tegangan diperoleh dengan analisis arus searah (DC) dan analisis arus bolak-balik (AC).
TRANDUSER ULTRASONIC (PENERIMA)
+ VCC
Rc1 Rc2
Q2
Q1
V out
C2
R1 R2
RE C1
Gambar 2.7. Rangkaian penguat penerima
Analisis DC
Untuk analisis DC, kapasitor 1 (C1) dihubung buka.
Ic1
Ic2
Ib1
Ib2
Ie1
Ie2 Vout
Gambar 2.8 Rangkaian penguat untuk analisis DC
Menurut hukum Kirchoff tegangan maka :
B BE E E B
R V R I
I 1 = 2 − ………..(2-8)
Dimana RB = R1 + R2
IE2 =Ic+IB2 ... (2-9)
β
Ic
IB2 = ...(2-10)
IC1 = hfe.IB1 ...(2-11) IE2.RE = VCC – IC1.RC1 – VBE ... (2-12)
Masukkan persamaan (2-9) ke persamaan (2-11)
B BE E E fe C
R V R I h
I = 2 −
1 . ……..…………...……….(2-13)
Analisis AC
Untuk analisis AC, kapasitor C1 terhubung singkat.
Vin
Vo1 Vo2
Iin Ib
Gambar 2.9. Rangkaian penguat untuk analisis AC
Untuk memudahkan mencari penguatan tegangan atau gain maka perlu ditentukan dan dihitung parameter-parameter yang menentukan penguatan tegangan.
A. Menghitung re1 dan re2
1 e
r dan re2 dapat dicari dengan persamaan :
re =
E
I mV
26
...(2-14)
Pada penguatan tingkat pertama arus basis diperoleh dari arus umpan balik DC. IE1 = ( hfe + 1 ).Ib1 ; dimana hfe = β
B BE E E b R V R I
I 1 = 2. −
B BE E E fe E R V R I h
I =( +1) 2. −
1 ...(2-15)
re1 =
1 26 E I mV ... (2-16)
B. Menghitung Rin1 dan Rin2
Dari gambar 2.9 , Rin1 merupakan paralel antara R1 dengan hfere1.
1 1 1 1 1 . . . e fe e fe in r h R r h R R +
= ………...………...(2.17)
Dari gambar 2.9 , Rin2 merupakan paralel dari RC1 dan Zin2.
Zin2 =
2 1 b O i V 2 2 2 2 2 2 // ) 1 ( . b E fe b e b in i R R h i r i
Z = + +
Zin2 = re2 + ib2( hfe + 1 ) RE //R2 ... (2.18) Rin2 = RC1//Zin2
2 2 2 2 1 . in in in in C R Z Z R R −
= ………..………...(2.19)
C. Mencari penguatan tegangan pertama (AV1)
iin =
1 in R Vs in e fe b i r h R R i . . 1 1 1 + = 1 1 1 1 . . in S e fe b R V r h R R i + =
fungsi Vs terhadap ib
1
1 1
1( . )
. R r h R R i
VS = b in + fe e
AV1 = − Vs VO1 ) . ( . . . . 1 1 1 1 2 1 e fe in b in b fe V r h R R i R R i h A + − = ) . ( . . 1 1 1 1 2 1 e fe in in fe V r h R R R R h A + −
= ………...……….(2-20)
D. mencari penguatan tegangan kedua ( AV2) VO2 = hfe.ib2.RC2
VO1 = hfe.re2.ib2 + ib2( hfe + 1 )RE //R2
AV2 = −
2 2 2 2 2 2 2 // ) 1 ( . . . . R R h i i r h R i h A E fe b b e fe C b fe V + + −
= …………..…….……(2-21)
Jika hfe >> 1 maka persamaan (2-21) menjadi :
) // ( 2 2 2 2 R R r R A E e C V + −
= ………....………(2-22)
Dari penguatan pertama ( ) dan penguatan kedua ( ) dapat dicari penguatan total ( ) yaitu dengan mengalikan penguatan pertam dengan penguatan kedua.
1 V
A AV2
Vtotal
A
AVtotal = AV1.AV2 ……….………. (2-23)
2.3.2 Detektor Puncak ke Puncak (peak-to-peak detector)
Rangkaian ini merupakan gabungan dari rangkaian penjepit DC dan detektor puncak yang disambung secara berurutan. Untai ini terdiri dari dua buah dioda dan dua buah kapasitor dengan konfigurasi seperti yang terlihat pada gambar 2.12.Sinyal masukan yang berupa gelombang sinus akan dilewatkan pada rangkaian penjepit positif dan akan dihasilkan gelombang keluaran dengan tegangan puncak dua kali tegangan puncak gelombang masukannya.
C RL masukan AC 1 2
Gambar 2.10 Rangkaian Penjepit Positif (Sumber: Malvino,1986)
Prinsip kerja dari rangkaian penjepit positif adalah sebagai berikut, pada saat setengah siklus negatif pertama dioda akan menghantar, pada puncak negatif dari
tegangan, kapasitor diisi sampai dengan Vp dengan polaritas seperti ditunjukkan gambar 2.11(a).
2 1
C
1
2
RL
1
2
C
1
2
RL
(a) (b) Gambar 2.11 Prinsip Kerja Rangkaian Penjepit Positif
(Sumber: Malvino,1986)
Sesaat setelah puncak negatif dioda tidak menghantar seperti pada gambar 2.11(b), dengan ketentuan tetapan waktu RlC jauh lebih besar daripada periode sinyal datang maka kapasitor masih hampir terisi penuh dengan tegangan Vp sehingga akan terbentuk sinyal keluaran terjepit positif seperti pada gambar 2.10. Jika sinyal dari rangkaian penjepit positif disearahkan dengan penyearah puncak maka hasilnya akan menjadi tegangan DC yang memiliki tegangan puncak mendekati 2Vp. Untuk mendapatkan pendeteksian puncak yang baik maka tetapan waktu pengosongan muatan RlC harus jauh lebih besar dari perioda sinyal datang sehingga akan dihasilkan riak keluaran yang kecil.
1
2
C C
RL
masukan AC
Gambar 2.12 Rangkaian Peak-to-Peak Detector
(Sumber: Malvino,1986)
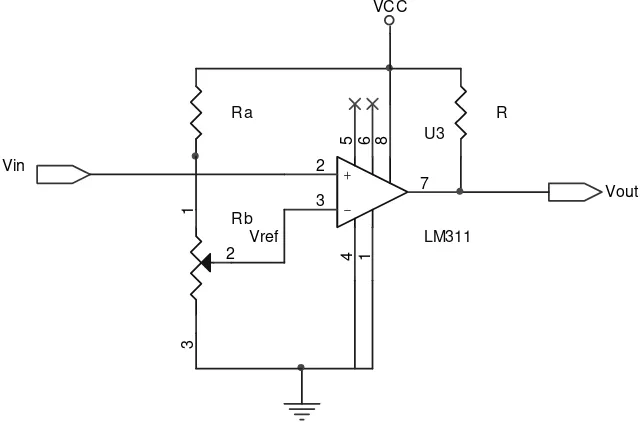
2.3.3. Pembanding Tegangan
Sinyal yang diterima oleh bagian penerima transduser ultrasonik adalah sinyal analog yang memiliki nilai tegangan yang bervariasi. Jika sinyal ini akan dipakai sebagai masukan pada mikrokontroler maka sinyal analog ini perlu diubah menjadi sinyal digital karena mikrokontroler bekerja secara digital.
Untuk mengubah sinyal analog ke digtal dengan mudah digunakan pembanding tegangan yang akan mengubah sinyal analog ke level tegangan TTL. Bentuk rangkaian pembanding tegangan dapat dilihat pada gambar 2.13.
Tegangan masukan negatif (Vref) dapat dihitung dengan:
Vref = Vcc R R
R
B A
B
+ ...(2-24) Jika Vin >Vref maka Vout = Vcc
Jika Vin< Vref maka Vout = 0
Dengan karakteristik rangkaian tersebut pembanding tegangan ini bisa dipakai untuk mengubah sinyal analog skala kecil menjadi level tegangan TTL sehingga sinyal masukan bisa dibaca oleh mikrokontroler.
VCC
+
-U3
LM311
2
3
7
5 6
4 1
8
Ra
Rb
1
3
2
R
Vout Vin
Vref
Gambar 2.13 Rangkaian Pembanding Tegangan
2.4 Mikrokontroler AT89S51
Mikrokontroler AT89S51 adalah mikrokontroler CMOS 8-bit yang berkemampuan tinggi dengan 4K bytes in-sistem programmable Flash Memory. AT89S51 ini dibuat dengan teknologi Atmel memori non-volatile. AT89S51 yang dipakai memiliki fitur: 4KB In-System Programmable Flash, 128 Bytes RAM, 32 jalur I/O, dua 16-bit timers/counters, Watchdog Timer, 2 data pointer, 5 vektor dua level interupsi, serial port full duplex, osilator on-chip dan clock circuitry.
2.4.1 Organisasi Memori AT89S51.
Memori merupakan rangkaian elektronis yang digunakan untuk menyimpan informasi secara temporer atau permanen. Memori biasanya digunakan untuk menyimpan data yang diperoleh dari saluran masukan-keluaran atau untuk menyimpan program dari sebuah sistem.
Mikrokontroler AT89S51 memiliki ruang alamat untuk memori program dan memori data yang terpisah, seperti terlihat pada gambar 2.14. Setiap memori program dan memori data eksternal dapat dialamati hingga 64Kbytes.
Pemisahan program dan data memori ini memungkinkan pengaksesan data memori dengan pengalamatan 8 bit, sehingga dapat langsung disimpan dan dimanipulasi oleh mikrokontroler dengan kapasitas akses 8 bit. Namun demikian, untuk pengaksesan data memori dengan alamat 16 bit, harus dilakukan dengan menggunakan register DPTR (Data Pointer). Program memori hanya dapat dibaca saja (diletakkan pada ROM/EPROM). Untuk membaca program memori eksternal, mikrokontroler akan mengirim sinyal PSEN (Program Store Enable). Sebagai data memori eksternal dapat digunakan RAM eksternal (maksimum 64 Kbyte).
Dalam pengaksesannya mikrokontroler akan mengirimkan sinyal RD (Read, melakukan operasi pembacaan data) dan WR (Write, melakukan operasi penulisan data). Bila diperlukan, program memori dan eksternal data dapat dikombinasikan dengan menyatukan sinyal RD dan PSEN ke dalam input gerbang AND dan menggunakan output dari gerbang tersebut sebagai sinyal read (baca) untuk program memori/Eksternal Data.
Gambar 2.14. Memori data dan memori program pada mikrokontroler AT89S51
(sumber: Agfianto:2004) 2.4.2. Memori Program
Memori program atau sering disebut dengan flash memory pada mikrokontroler AT89S51 memiliki kapasitas sebesar 4KB yang hanya bisa dibaca saja. Bila pin dihubungkan pada ground program memori dapat di akses secara
eksternal, bila pin dihubungkan pada Vcc program memori 4KB dapat diakses langsung pada alamat 0000H-0FFFH secara internal dan pada alamat 1000H-FFFFH secara eksternal.
___
EA
2.4.3. Memori Data
Memori data menggunakan memori jenis RAM. RAM merupakan memori yang dapat dibaca dan ditulis. RAM dipakai sebagai penyimpanan data pada saat program bekerja. Isi RAM akan hilang bila catu daya mati (Volatile Memory) Mikrokontroler AT89S51 memiliki memori data 256 byte dan dapat diakses secara pengalamatan langsung dan pengalamatan tidak langsung. Pengoperasian stack adalah contoh dari pengalamatan tidak langsung, jadi 128 bytes RAM data tersedia sebagai ruang stack. Peta memori dapat dilihat pada gambar 2.15.
Gambar 2.15. Peta memori dan metode untuk mengaksesnya (sumber: Agfianto:2004)
2.4.4. Register Fungsi Khusus (Special Function Register)
Peta dari memori on-chip disebut dengan ruang register fungsi khusus (special function register) yang diperlihatkan pada gambar 2.16.
Gambar 2.16. Peta memori SFR AT89S51 (Sumber: Agfianto,2004)
Akumulator
ACC atau akumulator yang menempati lokasi EOH digunakan sebagai register untuk penyimpanan data sementara dan dapat dialamati secara bit addressable.
Register B
Register B menempati lokasi FOH digunakan selama operasi perkalian dan pembagian, untuk instruksi lain dapat diperlakukan sebagai register scratch pad
(papan coret-coret) dan register B juga dapat dialamati secara bit addressable. Program Status Word (PSW)
Register PSW (lokasi D0H) mengandung informasi status program. Stack Pointer
Register Stack Pointer (lokasi 81H) merupakan register dengan panjang 8 bit, digunakan dalam proses simpan dan ambil dari/ke stack. Dan operasi yang sering melibatkan stack pointer adalah PUSH, POP, LCALL, ACALL, RET, dan RETI.
Data Pointer
Register Data Pointer terdiri dari DPTR untuk byte tinggi (DPH) dan byte rendah (DPL). Pada AT89S51 memiliki 2 buah DPTR untuk memudahkan pengaksesan baik internal maupun eksternal, yaitu DP0 dilokasi 82H-83H dan DP1 di lokasi 84H-85H. Untuk menggunakannya harus menginisialisasi bit DPS pada register AUXR1 (lokasi A2H). Bila DPS = 0, maka memilih register DPTR DP0L-DP0H dan bila DPS = 1, maka memilih register DPTR DP1L-DP1H. Kontrol Register
Register-register IP, IE, TMOD, dan TCON bersisi bit-bit kontrol dan status untuk sistem interupsi, pencacah/pewaktu dan serial port.
Port masukan/keluaran (I/O port)
Sama seperti keluarga MCS-51 lainnya, mikrokontroler AT89S51 memiliki 4 port masukan/keluaran (I/O port) yang diberi nama port 0, port 1, port 2 dan port 3.
Timer / Counter
Mikrokontroler AT89S51 mempunyai dua buah register timer/counter 16 bit, Timer 0 dan Timer 1. Pada saat sebagai Timer, register naik satu (increment) setiap satu cycle. Jika digunakan osilator 12 Mhz, maka satu cycle sama dengan 1/12 frekuensi osilator = 1μs. Pada saat sebagai counter, register naik satu (increment) pada saat transisi 1 ke 0 dari input eksternal, T0 atau T1.
Apabila periode tertentu telah dilampaui, timer/counter segera menginterupsi mikrokontroler untuk memberitahukan bahwa perhitungan periode waktu telah selesai dilaksanakan.
Register TCON
Pengontrol kerja timer/counter ada pada register timer control (TCON). Register TMOD
Pengontrol pemilihan mode operasi timer/counter ada pada register timer mode (TMOD).
Mode Timer/Counter Mode 0
Pada mode ini timer bekerja sebagai timer 13 bit yang terdiri dari counter 8 bit dengan pembagi 32 (pembagi 5 bit). Setelah perhitungan selesai, mikrokontroler akan mengeset Timer Interrupt Flag (TF1). Dengan membuat GATE = 1, timer dapat dikontrol oleh input dari luar (INT1), untuk fasilitas pengukuran lebar pulsa. Register 13 bit yang digunakan terdiri dari 8 bit dari TH1 dan 5 bit bawah dari TL1 (bit 6,7,8 tidak digunakan). Mengeset TR1 tidak akan menghapus isi. Operasi pada mode 0 untuk Timer 0 dan Timer 1 adalah sama. Mode 1
Mode 1 sama dengan mode 0 kecuali register timer akan bekerja dalam mode 16 bit.
Mode 2
Mode 2 menyusun register timer sebagai 8 bit counter (TL1) dengan kemampuan pengisian otomatis. Overflow dari TL1 tidak hanya men-set TF1 tetapi juga mengisi TL1 dengan isi TH1 yang diisi sebelumnya oleh software. Pengisian ulang tidak mengubah nilai TH1.
Mode 3
Dalam operasi mode 3 timer 1 akan berhenti, hitungan yang sedang berjalan dipegang. Efeknya sama seperti mengatur TR1 = 0. Timer 0 dalam mode 3 membuat TL0 dan TH0 sebagai dua counter terpisah. TL0 menggunakan kontrol bit timer 0 yaitu C/T, GATE, TR0, INT0 dan TF0. TH0 berfungsi hanya sebagai timer dan mengambil alih penggunaan TR1 dan TF1 dari timer 1 dan sekarang TH0 mengontrol interupsi timer 1. Mode 3 diperlukan untuk aplikasi yang membutuhkan ekstra timer/counter. Saat timer 0 dalam mode 3, timer 1 dapat dihidupkan atau dimatikan, atau dapat digunakan oleh port serial sebagai pembangkit bound rate dalam aplikasi komunikasi serial.
2.4.5. Pemrograman Mikrokontroler
Program pengendali mikrokontroler disusun dari kumpulan instruksi, instruksi tersebut setara dengan kalimat perintah bahsa manusia yang hanya terdiri atas predikat dan objek. Objek dalam pemrograman mikrokontroler adalah data yang tersimpan didalam memori, register dan I/O. Sedangkan kata kerja yang dikenal secara umum dikelompokkan menjadi perintah untuk pemindahan data, aritmatika, operasi logika dan pengatur alir program.
2.4.6. Mode Pengalamatan pada Mikrokontroler
Untuk mengakses data di dalam memori mikrokontroler dapat dilakukan dengan beberapa mode, yaitu:
1. Direct Addressing Mode (Mode Pengalamatan Langsung)
Pada direct addressing instruksi yang dikeluarkan secara spesifik akan menyebutkan alamat dari operand yang diproses. Hanya internal Data RAM dan SFR yang dapat diproses dengan menggunakan direct addressing ini. Contoh: MOV A,55h.
2. Indirect Addressing Mode (Mode Pengalamatan Tak Langsung)
Pada indirect addressing instruksi yang dikeluarkan akan menyebutkan sebuah register yang berisi alamat dari operand yang akan diproses. Baik internal maupun eksternal RAM dapat diakses menggunakan indirect addressing ini.
Register alamat untuk 8 bit yang dapat dipakai adalah R0 dan R1 dari bank register, atau stack pointer. Pada pengalamatan 16 bit dapat menggunakan register DPTR (Data Pointer).
Contoh: MOV A,@R0
3. Register Addressing Mode (Mode Pengalamatan Register)
Bank register berisi register R0 sampai R7 yang dapat diakses dengan instruksi-instruksi tertentu dimana hanya akan melibatkan 3 bit register spesifik yang berisi opcode dari instruksi. Instruksi yang mengakses register dengan cara ini akan lebih efisien, karena mode ini akan menghilangkan bagian byte alamat. Saat instruksi ini dieksekusi, satu dari delapan register dari bank register akan diakses.
Contoh: MOV A,R2.
4. Immediate Addressing Mode (Mode Pengalamatan Segera)
Proses pengalamatan ini terjadi pada sebuah instruksi ketika nilai operand merupakan data yang akan diproses. Biasanya operand tersebut selalu diawali dengan tanda ‘#’. Contoh: MOV A,#50H.
2.4.7 Instruksi pada Mikrokontroler
Instruksi yaitu suatu perintah dalam program dan dibagi menjadi empat yaitu : 1. Operasi aritmatika
Instruksi ini digunakan sebagai instruksi penghitungan meliputi penambahan, pengurangan, perkalian, dan pembagian adapun contoh instruksinya yaitu ADD, ADDC, SUBB, INC, DEC, MUL, DIV.
2. Operasi logika.
Operasi ini digunakan untuk melakukan operasi Boolean yaitu AND, OR, EXOR, dan NOT. Instruksi ada bermacam-macam yaitu ANL, ORL, XRL, CLR, CPL, RL, RLC, RR, RRC, SWAP.
3. Operasi Transfer data.
Operasi ini digunakan sebagai instruksi untuk memindah data, pengambilan data, penyimpanan data dan pertukaran data. Contoh instruksi ini yaitu MOV, MOVC, MOVX, PUSH, POP, XCH, XCHD.
4. Operasi manipulasi bit.
Contoh instruksi operasi manipulasi bit yaitu CLR, SETB, CPL, JC, JNC, JB, JNB, JBC.
5. Operasi percabangan.
Operasi ini digunakan untuk pemanggilan soubroutine dan lompatan program. Contoh dari instruksi ini yaitu ACALL, LCALL, RET, AJMP, LJMP, SJMP, JMP, JZ, JNZ, CJNE, DJNZ, NOP.
2.4.8. Rangkaian Oscillator
Pada mikrokontroler AT89S51 mempunyai oscillator internal (on-chip
oscillator) yang digunakan sebagai sumber clock CPU. Untuk dapat
menggunakannya perlu ditambah sebuah rangkaian sederhana menggunakan sebuah kristal dan dua buah kapasitor (C1 dan C2) seperti pada gambar 2.17.
Gambar 2.17. Rangkaian oscillator
(Sumber: Agfianto,2004)
2.5 Piranti Penampil
Piranti penampil pada pengukur tinggi badan menggunakan LCD ( Liquid Crystal Display), dimana LCD adalah penampil yang tampilannya tersusun dari segmen-segmen yang dapat menyala apabila segmen-segmen tersebut diberi tegangan. LCD terbuat dari bahan kristal cair yang terletak diantara dua lapisan kaca yang terlapisi. Elektroda-elektroda transparan dan filter polarisasi cahaya, jika elektroda-elektroda tersebut diberi tegangan maka cahaya dan segmen-segmen tidak menyala. Sehingga yang terlihat hanya latar belakang saja. Sebaliknya jika segmen-segmen diberi tegangan maka tidak terjadi pembelokan cahaya sehingga segmen-segmen akan terlihat bercahaya yang kontras dengan
latar belakang. LCD dalam berbagai aplikasi elektronika sering digunakan sebagai tampilan seperti jam digital, kalkulator, handphone.
0 5v DB0 DB1 DB2 DB3 E DB7 DB4 DB5 DB6
LCD DISPLAY 2 * 16 KARAKTER
K A DB0 DB1 DB2 DB3 DB4 DB5 DB6 DB7 R/W E RS GND Vcc Vee RS
Gambar 2.18. Display LCD 2 × 16 karakter
Pada perancangan alat ini digunakan Display LCD 2 x 16 karakter seperti pada gambar 2.18, yang artinya LCD ini memiliki 2 baris dan 16 kolom karakter, sehingga jumlah total karakter yang dapat ditampilkan sekaligus adalah sebanyak 32 karakter. Masing-masing karakter tersebut terbentuk dari susunan dot
yang berukuran 8 baris dan 5 kolom dot. LCD yang digunakan adalah LCD buatan Hitachi dengan driver HD44780U yang memiliki 16 kaki pin seperti yang terlihat pada tabel 2.2.
Tabel 2.2. Pin LCD
Nomor Pin Simbol Nomor Pin Simbol
1 VEE (0V) 9 DB2
2 VCC (5V) 10 DB3
3 GND (0V) 11 DB4
4 RS 12 DB5
5 R/W 13 DB6
6 E 14 DB7
7 DB0 15 A 8 DB1 16 K
Deskripsi pin pada LCD:
1. D0 sampai dengan D7 merupakan jalur data yang dipakai untuk menyalurkan kode ASCII maupun perintah pengatur kerja LCD tersebut. 2. RS merupakan singkatan dari Register Select yang sipakai untuk
membedakan jenis data yang dikirim ke LCD, kalau RS = 0 maka data
yang dikirim adalah perintah untuk mengatur kerja LCD tersebut. Sebaliknya jika RS = 1 maka data yang dikirim adalah kode ASCII yang ingin ditampilkan.
3. R/W merupakan singkatan dari Read/Write. Jika R/W = 0 maka menandakan akan diadakan pengiriman data ke LCD. Dan jika R/W = 1 maka menandakan akan diadakan pengambilan data dari LCD.
4. E (Enable) merupakan sinyal sinkronisasi., digunakan untuk memberitahukan kepada LCD bahwa data akan dikirim. Untuk mengambil data E = 1, untuk kondisi siap menerima perintah selanjutnya E = 0.
5. A (Anoda) dan K (Katoda) merupakan pin yang digunakan untuk menyalakan backlight dari layar LCD.
2.6 Motor DC
Motor DC adalah suatu alat yang dapat mengubah energi listrik menjadi energi mekanik (gerak) dengan prinsip elektromagnet. Prinsip kerja dari motor DC adalah arus yang dilewatkan pada kumparan akan menimbulkan sebuah medan magnet buatan, sehingga medan magnet tersebut akan tarik-menarik atau tolak-menolak dengan magnet permanet yang diberikan. Dengan gaya tarik-menarik atau tolak-menolak itulah sehingga akan timbul gerakan dari media yang dialiri listrik tersebut. Gerakan motor DC dapat dengan mudah diatur gerakannya CW atau CCW hanya dengan membalik arah arusnya, sehingga dalam hal ini motor DC membutuhkan arus searah untuk bekerja. Simbol motor DC yang digunakan pada rangkaian seperti terlihat pada gambar 2.19.
Motor DC
Gambar 2.19 Simbol motor DC
2.7 IC L293D
aan normal port-port pada mikrokontroler AT89C51 tidak Dalam kead
mampu untuk menghidupkan motor DC, karena keluaran arus pada port-portnya sangat kecil, sehingga AT89S51 dalam hal ini membutuhkan penggerak yang mampu menjalankan motor DC. Rangkaian penggerak untuk motor DC pada alat ukur tinggi badan menggunakan IC L239D, seperti pada gambar 2.20. L293D adalah IC dua rangkaian half-H bridge untuk mengatur arah aliran arus listrik ke beban dengan kemampuan dapat mengalirkan arus tinggi (600 mA ke atas) dan
range power supply 4,5 V sampai 36 V. IC ini dirancang untuk mengemudikan
beban induktif seperti solenoid, motor stepper, motor DC. Pada L293D dilengkapi pin-pin 1,2EN dan 3,4EN yang berfungsi untuk mengaktifkan dan menonaktifkan keluaran ke beban induktif. Pada L293D terdapat dioda pengaman internal yang berfungsi untuk menghindari rusaknya transistor pada saat terjadi kenaikan tegangan akibat on-off-nya beban induktif,
Gambar 2.20. IC L293D
2.8 Sensor Putaran
digunakan adalah optocoupler yang menggabungkan
gan: Sensor putaran yang
LED dengan fototransistor dalam satu kemasan. Fototransistor tersebut mendapatkan sinar dari LED yang dipasang berhadapan dengan fototransistor seperti pada gambar 2.21. Sensor tersebut berfungsi sebagai penghasil pulsa yang digunakan untuk menghentikan putaran motor DC. Jalannya sinar LED tersebut akan diputus oleh baling-baling (rotary encoder) yang ikut berputar dengan motor sehingga dihasilkan pulsa-pulsa yang digunakan sebagai pembanding.
Untuk mencari nilai R1 dan R2 pada gambar 2.21 dapat ditentukan den
) (
) (
1 Vcc VF maks
R = − ...(2-24)
maks F
I
C CE
I V Vcc
R2= − ...(2-26)
R2 R1
VCC VCC
2 2
1
3
1
OUT PUT 1
2
4
Gambar 2.21. Rangkaian Optocoupler
BAB III
PERANCANGAN ALAT
Dalam merancang alat ukur tinggi badan terdapat dua tahap yang harus
hardware
dikerjakan yaitu merancang perangkat keras ( ) dan merancang perangkat lunak (software). Perancangan perangkat lunak dibutuhkan untuk mengolah data yang dihasilkan oleh rangkaian perangkat keras.Diagram kotak rancangan pengukur tinggi badan menggunakan tranduser ultrasonik dapat dilihat pada gambar 3.1
Penguat pemancar
Penguat penerima
Tranduser Ultrasonik (Pemancar)
Tranduser Ultrasonik (Penerima) Mikrokontroler
AT89S51
O B Y E K
Motor DC
LCD Rotary encoder
Optocoupler
Jembatan h
Peak-to-peak detector dan komparator
Gambar 3.1 Diagram kotak rancangan pengukur tinggi badan menggunakan tranduser ultrasonik
3.1 Perangkat Keras (Hardware) 3.1.1 Pemancar Gelombang Ultrasonik
membangkitkan sinyal ultrasonik dengan trasonik terbagi atas dua blok fungsi, yaitu
Gambar 3.2 Blok Pemancar
3.1.1.1 Osilator
Sinyal osilasi berupa gelombang persegi (kotak) dengan frekuensi 40 KHz n oleh untai pembangkit frekuensi menggunakan IC timer seri 555 ya
Pemancar gelombang ultrasonik frekuensi 40 KHz. Pemancar gelombang ul
: osilator 40 KHz dan buffer terlihat pada gambar 3.2.
yang dibangkitka
ng bekerja sebagai astable multivibrator. Skema osilator 40 KHz dapat dilihat pada gambar 3.3.
8
6 5
R3
10K
4
10K R5
1 3
2
ke buf f er Q1
9013
3
2
1
1
R2
47K
3
R1
10K
R4 4K7
7
LM555
C2 2uF
2
9 V
C1
10nF P1.0
Gambar 3.3 Osilator menggunakan NE555
Sinyal output pada timer 555 berupa gelombang kotak yang diumpankan ke untai
i 40 KHz diperoleh dari kombinasi lai-ni
buffer dikendalikan oleh transistor 9013 yang diumpankan pada pin reset (pin 4 pada 555), sedangkan sinyal input pada basis transistor 9013 berasal dari Port 1 pin 1(P1.1) pada mikrokontroler AT89S51. Q1 pada gambar 3.3 difungsikan sebagai saklar.
Gelombang kotak dengan frekuens
ni lai resistor dan kapasitor yang terpasang pada pin 6 da 7 IC timer. Pada gambar 3.3 resistor dan kapasitor diwujudkan pada kombinasi C2, R3, R4, dan R5. Uraian perhitungan penentuan frekuensi gelombang kotak menggunakan persamaan 2-7. C Rb Ra T f ) 2 ( 44 , 1 1 + =
= dengan f = 40 KHz
C = 1 nF Maka 9 3 10 1 ) 2 ( 44 , 1 10
40x −
+ = x Rb Ra 6 10 40 44 , 1 ) 2 ( + = − x Rb Ra
dengan = 1 KΩ
ilai resistansi resis r tidak ada di pasaran sehingga perlu disesua me . 6 10 036 , 0 ) 2
(Ra+ Rb = x
3
10 36 ) 2
(Ra+ Rb = x Ra
maka
3
10 35 2Rb= x
3 10 5 , 17 x Rb=
N to 17,5x103
ikan dengan resistansi resistor yang ada dipasaran, yaitu dengan menyusun secara seri resistor 15 KΩ dengan variabel resistor yang dipilih sebesar 10 KΩ (variable resistor ditrim untuk mendapatkan nilai 2,5 KΩ sehingga memenuhi harga Rb yang telah dicari).Pada gambar 3.3, R3 merupakan Ra dan (R4 + R5)
rupakan Rb
R1
10K
Q1 9013
3
2
1
0V
9 V
9V
ke pin 4 IC 555
0V
5V
P1.0
R2
47K
Gambar 3.4 Transistor 9013 sebagai saklar
Cara 3) adalah sebagai
berikut: apabila logika 1 diberikan oleh P1.0 ke basis Q1 akan mengakibatkan Q1
Bagian buffer berfungsi untuk memperkuat arus sinyal yang berasal dari r 555 sehingga pemancar ultrasonik memiliki jangkauan yang cukup j
kkan pada gambar 2.6. Gerbang not U1B berfungsi untuk membalik fase seh
kerja osilator (rangkaian pada gambar 3.
on (bekerja) sehingga nilai tegangan pada kaki kolektor terhadap ground akan mendekati 0 volt. Kondisi logika 0 pada kaki kolektor Q1 yang terhubung dengan pin reset 555 sehingga output pada timer bernilai nol (tidak ada keluaran pada outputnya)Pada kondisi yang lain yaitu bila P1.0 memberikan logika 0 yang berarti basis Q1 mendapat logika 0 mengakibatkan transistor off (tidak bekerja) sehingga nilai tegangan kaki kolektor Q1 akan sama dengan tegangan catunya (berlogika 1 = 9 Volt),seperti terlihat pada gambar 3.4. Kaki kolektor yang terhubung dengan pin reset 555 mengakibatkan timer mulai bekerja membentuk sinyal gelombang persegi dengan frekuensi 40 KHz.
3.1.1.2 Buffer
output IC time auh.
Untaian buffer terdiri dari susunan gerbang not (inverter ) CMOS CD4049 yang ditunju
ingga tegangan output pada paralel gerbang not U1A dan U1C akan selalu berlawanan dengan tegangan output pada paralel gerbang not U1D dan U1E,
dengan demikian amlitudo gelombang persegi yang diunpankan pada pemancar ultrasonik menjadi dua kali lipat dari amplitudo semula. Capasitor berfungsi untuk menahan arus DC yang akan masuk ke tranduser ultrasonik, karena arus DC bisa mengakibatkan kerusakan pada tranduser ultrasonik,sehingga hanya sinyal ultrasonik saja yang bisa masuk ke tranduser ultrasonik.
Pada saat input buffer mendapat logika 1 (high) dari output timer, maka output gerbang U1B bernilai 0 (low), kondisi demikian mengakibatkan output
ombang Ultrasonik
Penguat yang diperlukan harus mempunyai peroleh tegangan yang tinggi, Penguat bisa menggunakan paralel gerbang not U1A dan U1C bernilai 1 (high), sedangkan output paralel gerbang not U1D dan U1E bernilai 0 (low) akibat dari logika 1 (high) dari output timer yang diberlakukan sebagai inputnya. Sebaliknya, pada saat input buffer mendapat logika 0 (low) dari output timer, makaa output gerbang not U1B bernilai 1 (high), kondisi demikian mengakibatkan output paralel gerbang not U1A dan U1C bernilai 0 (low), sedangkan output paralel gerbang not U1D dan U1E bernilai 1 (high) akibat dari logika 0 (low) dari output timer yang diberlakukan sebagai inputnya.
3.1.2 Rangkaian Penerima Gel
mempunyai respon yang baik pada frekuensi 40 KHz .
penguat tidak linear karena keluaran penguat nantinya akan disearahkan. Dengan spesifikasi tersebut diatas penguat dapat dibangun menggunakan transistor bipolar yang dirangkai seperti gambar 2.7. Transistor yang digunakan tipe 2N3904 dengan hfe = 100, dan Ic = 10 mA. Dengan Ic dan β atau hfe yang sudah diketahui maka dapat dicari besarnya IB2 dengan menggunakan persamaan 2-10
100 10
2
m
IB =
= 0,1 mA
enggunakan persamaan 2-9 dan IE2 dengan m
IE2 =10mA+0,1mA = 10,1 mA
Dengan menentukan besarnya R1=10 KΩ ,R2 = 100 Ω dan Re = 2200 Ω, dapat gunakan persamaan 2-15
dicari besarnya IE1 meng
100 10 7 , 0 2200 . 1 , 10 ) 1 100 ( 1 + − + = K V m IE
= 0,2152 mA
encari nilai Rc1 dan Rc2, menggunakan analisis AC dengan rangkaian tan tegangan pertama dipengaruhi oleh Rc1 dan
Untuk m
seperti gambar 2.9. Pengua re1
sedangkan untuk penguatan tegangan kedua dipengaruhi oleh Rc2 dan re2. Besarnya re1 dicari menggunakan persamaan 2.16
mA mV e 2152 , 0 26
r1 =
= 120,817 Ω
encari m nggunakan persamaan 2-14 Dan untuk m re2 e
re2 =
m
1 , 10 A
= 2,574 Ω
ambar .7 transistor berfungsi sebagai penguatan. Dimana untuk rnya ditentukan 30 kali sedangkan untuk penguatan kedua
=
mV
26
Pada g 2 penguatan pertama besa
besarnya ditentukan 70 kali maka dari kedua penguatan itu didapatkan jumlah penguatan totalnya adalah AV1xAV2=30x70 maka AVTotal = 2100 kali.
Dengan diketahuinya besar penguatan pertama besarnya nilai RC1 belum bisa dicari, untuk itu terlebih dahulu dicari Rin1 dengan persamaan 2-17
1 in R 817 , 120 . 100 10 817 , 120 . 100 . 10 + K K
= 5471,363Ω
menggunakan persamaan 2-20
2 in R Dan mencari 30 = ) 817 , 120 . 100 10 ( 363 ,
1 K +
547
10 .
2 K
in
30 = 8,276x . 100R
3
10− .Rin2
2 = Rin 3 10 276 , 8 30 − x 939
Besarnya nilai dicari menggunakan persamaan 2-19, dalam persamaan 2-19 terdapat nilai , untuk itu terlebih dahulu dicari nilai menggunakan
= 3624, Ω
1 C
R
2 in
Z Zin2
persamaan 2-18 100 2200 100 . 2200 2 + in = 96 ) 1 100 ( 574 ,
2 + +
=
Z
63,443 Ω
sehingga nilai bisa dicari dengan menggunakan persamaan 2-19
1 C R 939 , 3 443 , 9663 1 − C 624 443 , 9663 939 , 3624 = x R
Pada penguatan kedua besar penguatannya ditentukan sebesar 70 kali maka nilai t dicari menggunakan persamaan 2-22
= 5801 Ω
2 C R dapa 100 2200 100 2200 574 , 2 + + x
70= RC2
226 , 98 70= RC2
= 70 . 98,226 Ω
Dalam perancangan digunakan nilai Rc1 = 6,8 KΩ , Rc2 = 8,2 KΩ. Dengan n ni 2 menghasilkan penambahan gain.
us pada infra red maka perlu diketahui arus maksimum infra red ( ) sebesar 60 mA dan besar 1,7 volt data ini diam il dari data sheet dan Vcc = 5 volt. Dengan menggunakan persamaan 2.19 R1 dapat dicari
2 C
R
= 6875,83
perubaha lai Rc1 dan Rc
3.1.3 Sensor Putaran
Untuk menentukan hambatan (R1) sebagai pembatas ar
) (maks F
I
b tegangan maju ( VF) se
mA V V R 60 7 , 1 5 1= −
= 55 Ω
Dalam perancangan digunakan resistor sebesar 100 Ω sehingga didapat nilai = 33 mA.
uk mencari R2 foto transistor, dari data sheet didapat Ic = 1,8 mA t dan dengan menentukan Vcc = 5 volt maka dengan
F
I
Unt pada dan VCE= 0,4 vol
menggunakan persamaan 2.20 didapat :
mA
8 , 1
= 2555,56 Ω
Dalam perancangan digunakan resistor sebesar 2200
V V
R2=5 −0,4
Ω sehingga dihasilkan Ic = 2 mA.
y Encoder)
sebagai feed back. Pulsa yang dihasilkan oleh rotary