14 BAB III
METODOLOGI
Penyelesaian penelitian ini dengan urutan sebagai berikut:
Perakitan hardware dan mekanik, configuration raspberry pi3, communicating with raspberry Pi via mavlink, perancangan komunikasi IoT, perancangan aplikasi android, mekanisme autonomous, mekanisme tracking dan metode pengujian.
3.1 Perakitan Hardware Dan Mekanik
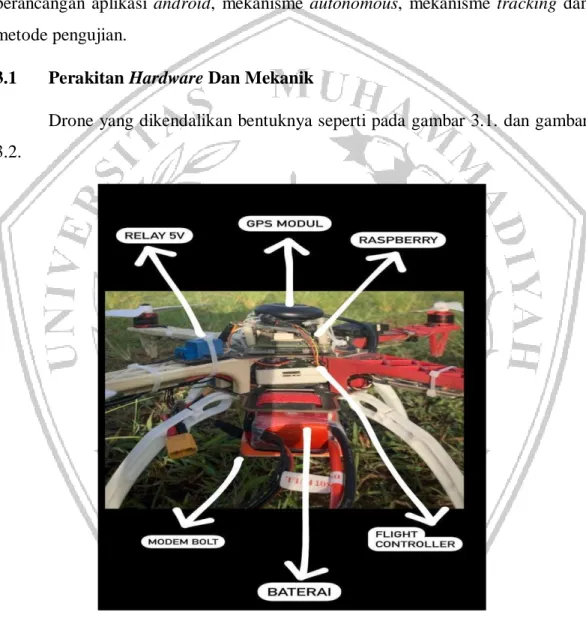
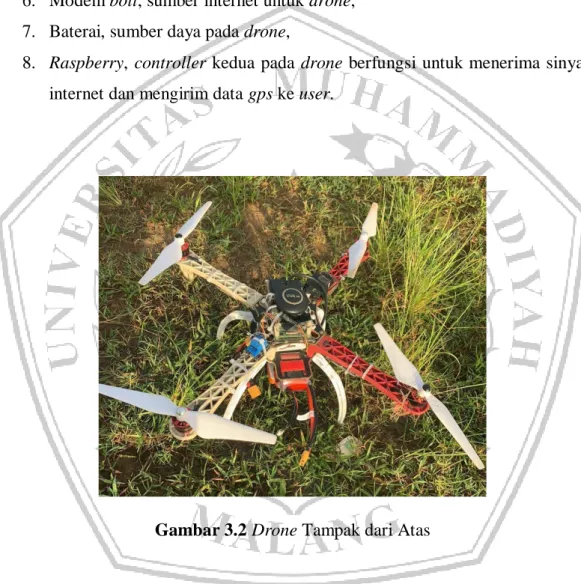
Drone yang dikendalikan bentuknya seperti pada gambar 3.1. dan gambar 3.2.
15 Gambar 3.1. merupakan gambar Drone yang telah dirakit yang terdiri dari :
1. Propeller / Baling-baling,
2. Frame/ Rangka yang berbentuk huruf “X”, 3. Relay 5V, sebagai saklar drone,
4. Gps Module, untuk aplikasi tracking, 5. Flight controller / Pengendali penerbangan, 6. Modem bolt, sumber internet untuk drone, 7. Baterai, sumber daya pada drone,
8. Raspberry, controller kedua pada drone berfungsi untuk menerima sinyal internet dan mengirim data gps ke user.
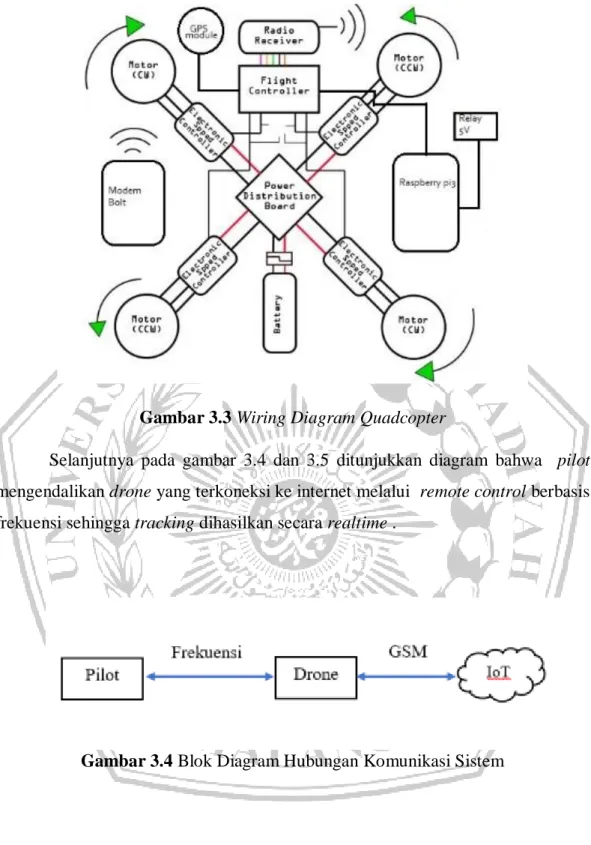
16 Gambar 3.3 Wiring Diagram Quadcopter
Selanjutnya pada gambar 3.4 dan 3.5 ditunjukkan diagram bahwa pilot mengendalikan drone yang terkoneksi ke internet melalui remote control berbasis frekuensi sehingga tracking dihasilkan secara realtime .
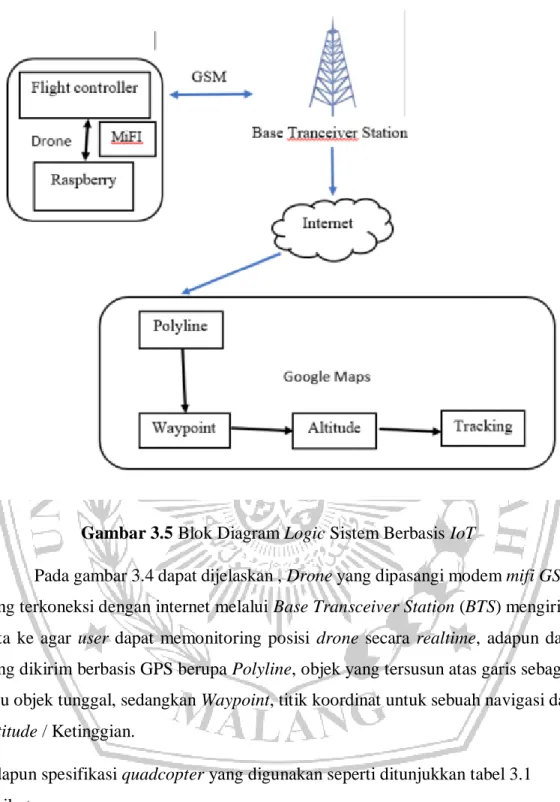
17 Gambar 3.5 Blok Diagram Logic Sistem Berbasis IoT
Pada gambar 3.4 dapat dijelaskan , Drone yang dipasangi modem mifi GSM yang terkoneksi dengan internet melalui Base Transceiver Station (BTS) mengirim data ke agar user dapat memonitoring posisi drone secara realtime, adapun data yang dikirim berbasis GPS berupa Polyline, objek yang tersusun atas garis sebagai satu objek tunggal, sedangkan Waypoint, titik koordinat untuk sebuah navigasi dan Altitude / Ketinggian.
Adapun spesifikasi quadcopter yang digunakan seperti ditunjukkan tabel 3.1 berikut.
Tabel 3.1 Perincian Komponen Quadcopter
Komponen Tipe
Flight Controller Pixhawk
18
Propeller 9450
Electronic Speed Controller 30A Opto
Frame F450 Battery 3S 6200MAh 50C Mikrokontroller Raspberry Pi 3B Relay 5V Modem Bolt Telemetry V8FR-II GPS Module Ublox 7M
Remote Control Turnigy 9XR Pro
Spesifikasi Modem Mifi:
● Kecepatan up to 100mbps ● Layar OLED Screen 0.96 incH. ● Support 4g LTE ● Baterai 2000 mAH
● Kapasitas 8 perangkat
Dan spesifikasi detail remote:
● 8 channel PPM/9 channel PCM ● 32 model memory ● 9-16 channel PPM (2nd TX module) ● USB interface
● Supports Heli/Acro/Glider model types ● Internal 2.4 Ghz antenna ● Built in JR dan Futaba Trainer ports ● Earphone support
● Supports M1,M2,M3,M4 stick modes ● Telemetry support ● 128x64 back lit liquid crystal display ● RTC
● Timer,Speaker dan low voltage warning ● Supports 3s Lipo ● System current measurement ● Vibrator embeded
19 ● Full ball bearing gimbals ● Micro SD card support ● 9xr pro firmware pre-loaded ● PPM dan PCM output
3.2 Pengkonfigurasian Raspberry Pi3
Raspi berfungsi sebagai mikrokontroller setelah di install dengan langkah-langkah berikut ini:
1. Menginstall SD card setelah itu menjalankan aplikasi SD formatter. Jika raspi sudah digunakan sebelumnya, klik format, karena SD formatter memiliki fungsi membersihkan dari file sebelumnya..
2. Menjalankan Win32 Disk Imager, kemudian meneliti ketika memilih device yang sesuai dengan kartu memori SD karena jikalau device yang dipilih salah maka dapat menghapus data pada kartu memori SD tersebut. Langkah selanjutnya klik “write” untuk menginstall raspbian dan menunggu beberapa menit sampai proses install selesai. Seperti pada gambar 3.6.
Gambar 3.6 Proses Penginstallan Raspbian Image Pada Aplikasi Win32 Disk Imager.
3. Menginstall dengan klik install raspbian, selanjutnya memasukkan kartu memori SD pada raspi dan raspi siap untuk digunakan.
20 3.3 Pengaturan Sistem Komunikasi Raspberry Pi via Mavlink
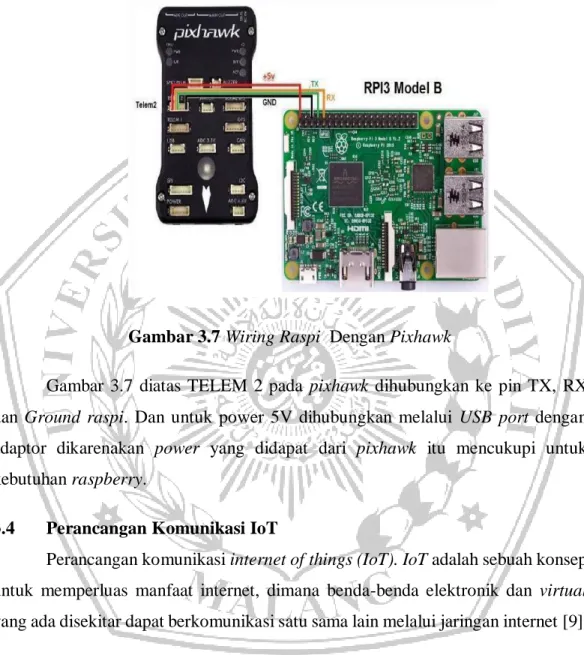
Komunikasi antara pixhawk dan raspi, dapat terjadi dengan cara menyambungkan port telem 2 pada pixhawk ke raspi. seperti pada gambar 3.7 dibawah ini.
Gambar 3.7 Wiring Raspi Dengan Pixhawk
Gambar 3.7 diatas TELEM 2 pada pixhawk dihubungkan ke pin TX, RX dan Ground raspi. Dan untuk power 5V dihubungkan melalui USB port dengan adaptor dikarenakan power yang didapat dari pixhawk itu mencukupi untuk kebutuhan raspberry.
3.4 Perancangan Komunikasi IoT
Perancangan komunikasi internet of things (IoT). IoT adalah sebuah konsep untuk memperluas manfaat internet, dimana benda-benda elektronik dan virtual yang ada disekitar dapat berkomunikasi satu sama lain melalui jaringan internet [9].
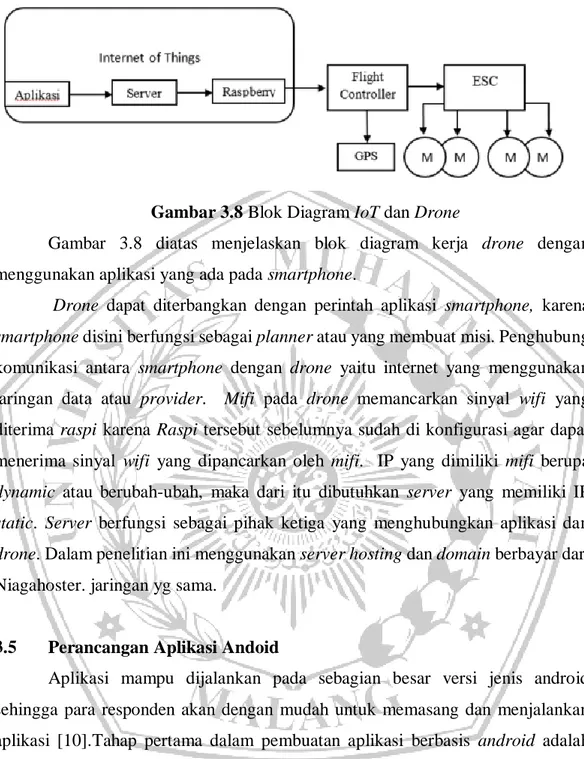
21 Gambar 3.8 Blok Diagram IoT dan Drone
Gambar 3.8 diatas menjelaskan blok diagram kerja drone dengan menggunakan aplikasi yang ada pada smartphone.
Drone dapat diterbangkan dengan perintah aplikasi smartphone, karena smartphone disini berfungsi sebagai planner atau yang membuat misi. Penghubung komunikasi antara smartphone dengan drone yaitu internet yang menggunakan jaringan data atau provider. Mifi pada drone memancarkan sinyal wifi yang diterima raspi karena Raspi tersebut sebelumnya sudah di konfigurasi agar dapat menerima sinyal wifi yang dipancarkan oleh mifi. IP yang dimiliki mifi berupa dynamic atau berubah-ubah, maka dari itu dibutuhkan server yang memiliki IP static. Server berfungsi sebagai pihak ketiga yang menghubungkan aplikasi dan drone. Dalam penelitian ini menggunakan server hosting dan domain berbayar dari Niagahoster. jaringan yg sama.
3.5 Perancangan Aplikasi Andoid
Aplikasi mampu dijalankan pada sebagian besar versi jenis android sehingga para responden akan dengan mudah untuk memasang dan menjalankan aplikasi [10].Tahap pertama dalam pembuatan aplikasi berbasis android adalah dengan pembuatan design terlebih dahulu [10]. Aplikasi ini yang dibuat menggunakan software ionic yang dapat mendukung penggunaan fitur GPS, Senter, Kamera dan lainnya yang terdapat di smartphone. Dan pada perancangan ini membutuhkan fitur GPS, dan beberapa fungsi on/off drone, start/stop tracking, riwayat, dan menutup aplikasi.
22 3.5.1 Fitur Aplikasi
Tabel ini dibuat untuk menjelaskan fungsi dari tombol yang terdapat di aplikasi yang telah dirancang.
Tabel 3.2 Tabel Antarmuka
Fitur Fungsi
On/Off Menghidupkan dan mematikan drone
Start/Stop Tracking Memulai dan berhenti dari fitur
tracking.
Simpan/Hapus Tracking Menyimpan dan Menghapus Data Tracking
Riwayat Tracking Menampilkan Data Jejak Perjalanan Drone
3.5.2 Mekanisme Autonomous
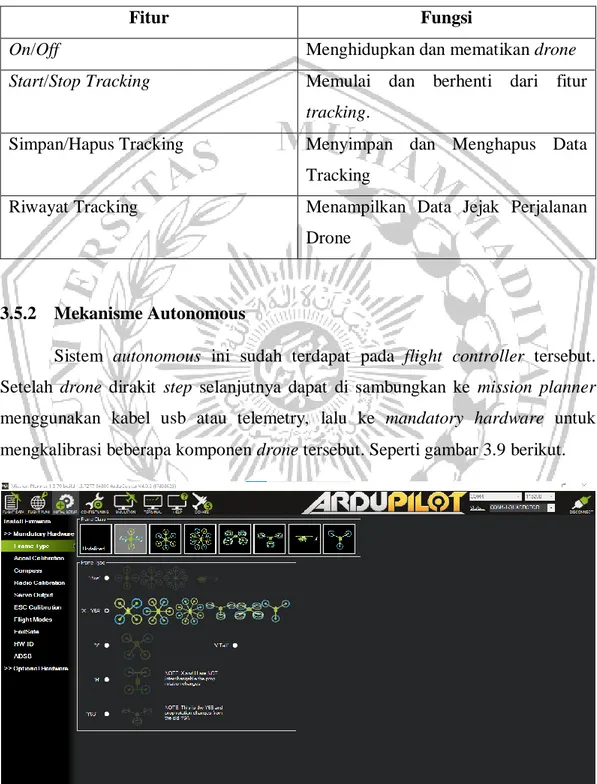
Sistem autonomous ini sudah terdapat pada flight controller tersebut. Setelah drone dirakit step selanjutnya dapat di sambungkan ke mission planner menggunakan kabel usb atau telemetry, lalu ke mandatory hardware untuk mengkalibrasi beberapa komponen drone tersebut. Seperti gambar 3.9 berikut.
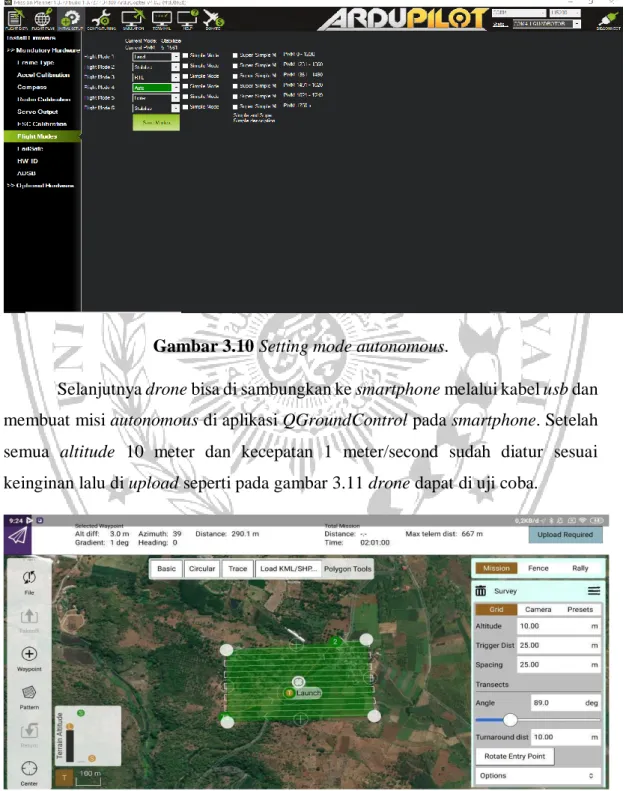
23 Cara kalibrasi beberapa komponen tersebut hanya dengan mengikuti perintah pada aplikasi mission planner dan setelah kalibrasi beberapa komponen dari tipe frame sampai dengan esc calibration, selanjutnya bisa menetukan flight mode yang ingin di input ke channel remote control. Seperti gambar 3.10 di bawah ini.
Gambar 3.10 Setting mode autonomous.
Selanjutnya drone bisa di sambungkan ke smartphone melalui kabel usb dan membuat misi autonomous di aplikasi QGroundControl pada smartphone. Setelah semua altitude 10 meter dan kecepatan 1 meter/second sudah diatur sesuai keinginan lalu di upload seperti pada gambar 3.11 drone dapat di uji coba.
24 Setelah misi diupload, drone sudah dapat terbang dengan misi autonomous dari take off serta landing tanpa bantuan remote control.
3.5.3 Mekanisme Tracking
Pada sistem tracking ini sangat mempermudah user agar dapat selalu memantau drone dari jarak jangkau yang lumayan jauh.
Gambar 3.12 Tracking Sistem.
Gambar 3.12 diatas menjelaskan bahwa Object menerima sinyal dari Gps Satelit, sinyal tersebut lah yang menghitung titik koordinat keberadaan Object dan data tersebut diterima dengan jaringan gsm ke Base Tranceiver Station dan mengirimnya kembali ke Monitoring pada Smartphone melalui jaringan internet. 3.6 Metode Pengujian
Pada tahap pengujian yang bertujuan untuk menentukan cara pengujian dari software yang dilakukan pada drone autonomous quadcopter dengan menambahkan fitur tracking dari smartphone yang berbasis android sebagai monitoring. Adapun cara penguji software sebagai berikut:
1. Pengujian aplikasi android.
2. Pengujian fitur tracking quadcopter pada aplikasi smartphone. 3. Pengujian daya jangkau quadcopter dengan user.
4. Pengujian terbang drone secara autonomous.
Pengujian tersebut dilakukan agar memastikan semua sistem yang dirancang bekerja dengan baik dan kualitas tracking yang telah dibuat menjadi lebih baik dan fleksible.
25 3.6.1 Pengujian Aplikasi Android
Pada aplikasi android terdapat 4 button, yaitu:
1. Tombol ON/OFF :Menghidupkan dan mematikan drone 2. Tombol Start/Stop :Memulai dan berhenti dari fitur tracking. 3. Tombol Hapus/Simpan :Menghapus dan simpan data tracking. 4. Tombol Riwayat :Menampilkan jejak riwayat.
3.6.2 Pengujian Fitur Tracking Quadcopter Pada Aplikasi Smartphone
Tahap ini untuk menampilkan posisi drone pada aplikasi android secara realtime. Agar dapat selalu terpantau walaupun kondisi drone agak jauh dari user. Pengujian ini digunakan ketika drone sudah mulai terbang tanpa menggunakan tombol dan sebagainya.
Berikut langkah-langkah menggunakan aplikasi tracking:
1. Buka aplikasi tracking yang telah dirancang dan usahakan status drone pada aplikasi terindikasi online.
2. Lalu terbangkan drone secara autonomous dengan remote dan monitoring tracking drone.
3.6.3 Pengujian Daya Jangkau Quadcopter Dengan User
Pengujian ini menggunakan GPS distance, dimana fungsi aplikasi ini agar dapat mengetahui batas jarak yang bisa digunakan untuk mengakses drone menggunakan aplikasi android. Meskipun menggunakan media internet sebagai penghubung antara aplikasi dengan drone, pengujian daya jangkau ini sangatlah penting karena, agar safe flight pada drone dan tidak terjadi hilang kendali. Cara pengujian ini dengan mengaktifkan kedua internet yang ada pada drone dan smartphone, kemudian mengaktifkan aplikasi GPS distance. Pertama, tempatkan drone yang diterbangkan, setelah itu berjalan secara lurus dan datar menjauh, sambil memperhatikan drone apakah dapat mengeksekusi perintah dari aplikasi atau tidak.
26 3.6.4 Pengujian Terbang Drone Secara Autonomous
Untuk mengoperasikan drone dengan menggunakan aplikasi dibutuhkan langkah-langkah sebagai berikut:
1. Meletakkan drone pada lapangan terbuka.
2. Menyambungkan drone dengan baterai dan tunggu sesaat hingga lampu indikator pada flight controller menyala.
3. Membuka aplikasi pada smartphone dan sambungkan ke drone dengan USB.
4. Kalibrasi komponen drone pada mandatory hardware jika belum dikalibrasi atau salah satu komponen mengalami kegagalan fungsi. 5. Menentukan waypoint sesuai yang diinginkan user.
6. Menentukan ketinggian dan kecepatan drone. 7. Melepaskan sambungan usb drone ke smartphone.
Lalu, arming drone dan aktifkan channel autonomous. Maka, drone akan terbang sesuai misi autonomous.