Ilustrasi bentuk himpunan fuzzy dan fungsi keanggotaannya dapat dilihat pada Contoh 3.
Contoh 3
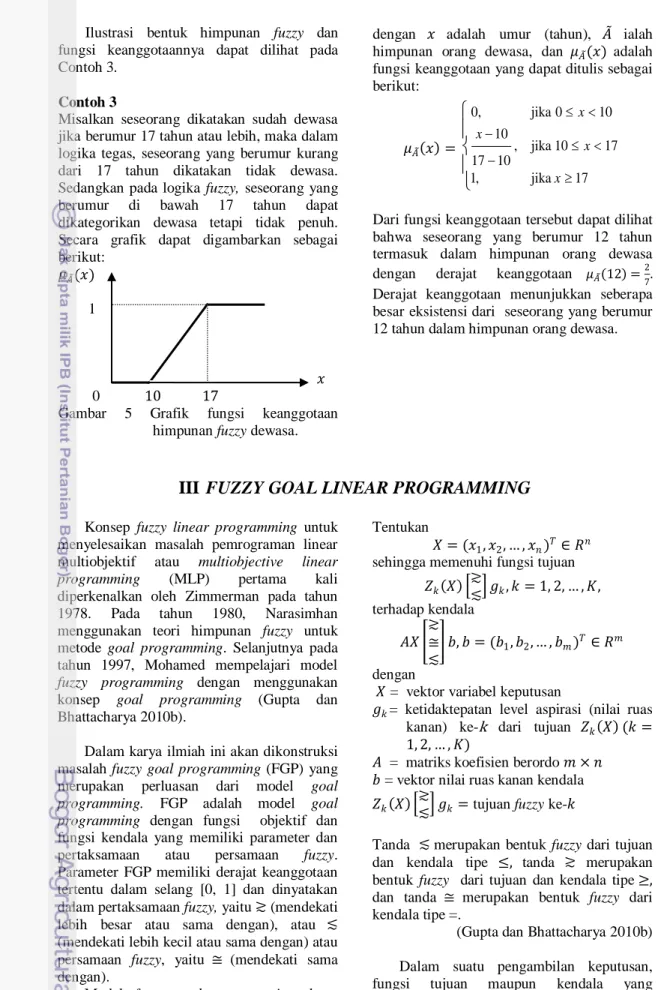
Misalkan seseorang dikatakan sudah dewasa jika berumur 17 tahun atau lebih, maka dalam logika tegas, seseorang yang berumur kurang dari 17 tahun dikatakan tidak dewasa. Sedangkan pada logika fuzzy, seseorang yang berumur di bawah 17 tahun dapat dikategorikan dewasa tetapi tidak penuh. Secara grafik dapat digambarkan sebagai berikut: 𝜇𝐴 (𝑥) 1 𝑥 0 10 17
Gambar 5 Grafik fungsi keanggotaan himpunan fuzzy dewasa.
dengan 𝑥 adalah umur (tahun), 𝐴 ialah himpunan orang dewasa, dan 𝜇𝐴 (𝑥) adalah fungsi keanggotaan yang dapat ditulis sebagai berikut: 𝜇𝐴 𝑥 = 0, jika 0 10 10 , jika 10 17 17 10 1, jika 17 x x x x
Dari fungsi keanggotaan tersebut dapat dilihat bahwa seseorang yang berumur 12 tahun termasuk dalam himpunan orang dewasa dengan derajat keanggotaan 𝜇𝐴 12 =27. Derajat keanggotaan menunjukkan seberapa besar eksistensi dari seseorang yang berumur 12 tahun dalam himpunan orang dewasa.
III FUZZY GOAL LINEAR PROGRAMMING
Konsep fuzzy linear programming untukmenyelesaikan masalah pemrograman linear multiobjektif atau multiobjective linear programming (MLP) pertama kali diperkenalkan oleh Zimmerman pada tahun 1978. Pada tahun 1980, Narasimhan menggunakan teori himpunan fuzzy untuk metode goal programming. Selanjutnya pada tahun 1997, Mohamed mempelajari model fuzzy programming dengan menggunakan konsep goal programming (Gupta dan Bhattacharya 2010b).
Dalam karya ilmiah ini akan dikonstruksi masalah fuzzy goal programming (FGP) yang merupakan perluasan dari model goal programming. FGP adalah model goal programming dengan fungsi objektif dan fungsi kendala yang memiliki parameter dan pertaksamaan atau persamaan fuzzy. Parameter FGP memiliki derajat keanggotaan tertentu dalam selang [0, 1] dan dinyatakan dalam pertaksamaan fuzzy, yaitu ≳ (mendekati lebih besar atau sama dengan), atau ≲ (mendekati lebih kecil atau sama dengan) atau persamaan fuzzy, yaitu ≅ (mendekati sama dengan).
Model fuzzy goal programming dapat diformulasikan sebagai berikut:
Tentukan
𝑋 = (𝑥1, 𝑥2, … , 𝑥𝑛)𝑇∈ 𝑅𝑛 sehingga memenuhi fungsi tujuan
𝑍𝑘 𝑋 ≳≲ 𝑔𝑘, 𝑘 = 1, 2, … , 𝐾, terhadap kendala 𝐴𝑋 ≳≅ ≲ 𝑏, 𝑏 = (𝑏1, 𝑏2, … , 𝑏𝑚)𝑇 ∈ 𝑅𝑚 dengan
𝑋 = vektor variabel keputusan
𝑔𝑘= ketidaktepatan level aspirasi (nilai ruas kanan) ke-k dari tujuan 𝑍𝑘 𝑋 (𝑘 = 1, 2, … , 𝐾)
𝐴 = matriks koefisien berordo 𝑚 × 𝑛 𝑏 = vektor nilai ruas kanan kendala 𝑍𝑘 𝑋 ≳≲ 𝑔𝑘= tujuan fuzzy ke-𝑘
Tanda ≲ merupakan bentuk fuzzy dari tujuan dan kendala tipe ≤, tanda ≳ merupakan bentuk fuzzy dari tujuan dan kendala tipe ≥, dan tanda ≅ merupakan bentuk fuzzy dari kendala tipe =.
(Gupta dan Bhattacharya 2010b) Dalam suatu pengambilan keputusan, fungsi tujuan maupun kendala yang merupakan himpunan fuzzy dapat dicirikan dengan fungsi keanggotaan masing-masing.
Selanjutnya ditetapkan derajat tertinggi sebagai level aspirasi dari tujuan fuzzy. Fungsi tujuan fuzzy menggunakan level aspirasi yang bersifat tidak tepat. Model fuzzy ini perlu diubah ke dalam persamaan tegas (crips) dengan menyubstitusikan fungsi tersebut pada fungsi keanggotaan fuzzy linear.
Menurut Gupta dan Bhattacharya (2010b), jika 𝑝𝑘 mendefinisikan toleransi untuk tujuan fuzzy ke-𝑘, yaitu konstanta positif yang dipilih secara subjektif dari ketidaktepatan nilai 𝑔𝑘 yang masih dapat diterima, maka fungsi keanggotaan dari fungsi tujuan fuzzy 𝑍𝑘(𝑋), dinyatakan dengan 𝜇 𝑍𝑘 𝑋 , dapat digunakan untuk mendefinisikan tujuan fuzzy 𝑍𝑘(𝑋) sebagai berikut:
Untuk tujuan fuzzy 𝑍𝑘(𝑋) ≳ 𝑔𝑘 , 𝑘 = 1,2, … , 𝐾, fungsi keanggotaannya didefinisikan sebagai berikut:
0, jika ( ) ( ) ( ) jika ( ) 1, jika ( ) , Zk X gk pk Zk X gk pk gk pk Zk X gk pk g Zk X gk p k k
Grafik fungsi keanggotaan 𝜇(𝑍𝑘(𝑥)) diberikan pada Gambar 6 berikut.
(lihat Lampiran 3) 𝜇(𝑍𝑘(𝑋)) 1 𝑍𝑘(𝑋) 0 𝑔𝑘− 𝑝𝑘 𝑔𝑘 𝑔𝑘+ 𝑝𝑘 𝑝𝑘 𝑝𝑘
Gambar 6 Grafik fungsi keanggotaan tujuan fuzzy 𝑍𝑘 𝑋 ≳ 𝑔𝑘.
Untuk tujuan fuzzy 𝑍𝑘 𝑋 ≲ 𝑔𝑘, 𝑘 = 1,2, … , 𝐾, fungsi keanggotaannya didefinisikan sebagai berikut:
1, jika ( ) ( ) ( ) , jika ( ) 0, jika ( ) k k k k k k k k k k k k k k k g p Z X g g p Z X g Z X g p p Z X g p
Grafik fungsi keanggotaan 𝜇(𝑍𝑘(𝑥)) diberikan pada Gambar 7 berikut.
(lihat Lampiran 3) 𝜇(𝑍𝑘(𝑋)) 1 𝑍𝑘(𝑋) 0 𝑔𝑘− 𝑝𝑘 𝑔𝑘 𝑔𝑘+ 𝑝𝑘 𝑝𝑘 𝑝𝑘
Gambar 7 Grafik fungsi keanggotaan tujuan fuzzy 𝑍𝑘 𝑋 ≲ 𝑔𝑘.
dengan 𝑔𝑘− 𝑝𝑘 dan 𝑔𝑘+ 𝑝𝑘 masing-masing menunjukkan batas bawah toleransi dan batas atas toleransi untuk tujuan fuzzy 𝑍𝑘 𝑋 .
Jika 𝑞𝑖 (𝑖 = 1, 2, … , 𝑚) mendefinisikan toleransi untuk kendala fuzzy ke-i, yaitu konstanta positif yang dipilih secara subjektif dari ketidaktepatan nilai 𝑏𝑖 yang masih dapat diterima, maka fungsi keanggotaan dari kendala fuzzy 𝑎𝑖 𝑋 (𝑎𝑖 adalah baris ke-i dari matriks 𝐴𝑋 ), dinyatakan dengan 𝜇 𝑎𝑖 𝑋 , dapat digunakan untuk mendefinisikan kendala fuzzy 𝑎𝑖 𝑋 sebagai berikut:
Untuk kendala fuzzy 𝑎𝑖 𝑋 ≳ 𝑏𝑖, 𝑖 = 1,2, … , 𝑚 (𝑏𝑖 adalah baris ke-𝑖 dari vektor 𝑏), fungsi keanggotaannya didefinisikan sebagai berikut: 0, jika ( ) ( ) ( ) , jika ( ) 1, jika ( ) i i i i i i i i i i i i i i i a X b q a X b q b q a X b q b a X b q
(Z (X)) k (Zk( ))X
( ( ))a Xi
Untuk kendala fuzzy 𝑎𝑖 𝑋 ≲ 𝑏𝑖, 𝑖 = 1,2, … , 𝑚, fungsi keanggotaannya didefinisikan sebagai berikut:
1, jika ( ) ( ) ( ) , jika ( ) 0, jika ( ) b q a Xi bi i i bi qi a Xi bi a Xi bi qi qi a Xi bi qi
dengan 𝑏𝑖− 𝑞𝑖 dan 𝑏𝑖+ 𝑞𝑖 masing-masing menunjukkan batas bawah toleransi dan batas atas toleransi untuk kendala fuzzy pertaksamaan 𝑎𝑖 𝑋 .
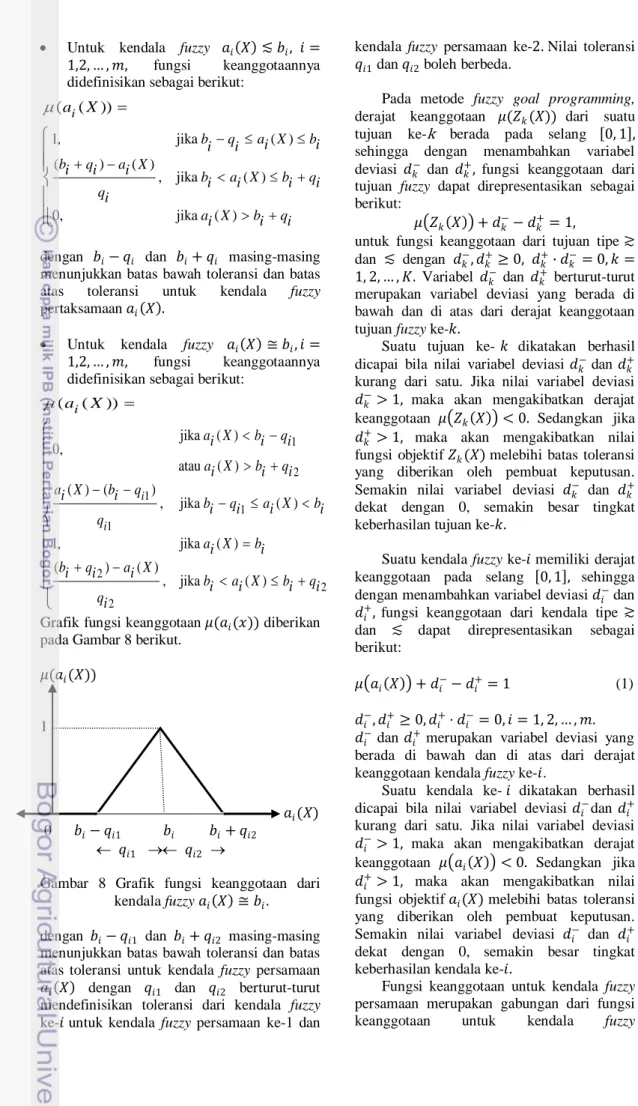
Untuk kendala fuzzy 𝑎𝑖 𝑋 ≅ 𝑏𝑖, 𝑖 = 1,2, … , 𝑚, fungsi keanggotaannya didefinisikan sebagai berikut:
1 2 1 1 1 2 2 2 jika ( ) 0, atau ( ) ( ) ( ) , jika ( ) 1, jika ( ) ( ) ( ) , jika ( ) i i a Xi bi qi a Xi bi qi a Xi bi q bi qi a Xi bi q a Xi bi bi qi a Xi bi a Xi bi qi qi
Grafik fungsi keanggotaan 𝜇(𝑎𝑖(𝑥)) diberikan pada Gambar 8 berikut.
𝜇(𝑎𝑖(𝑋)) 1 𝑎𝑖(𝑋) 0 𝑏𝑖− 𝑞𝑖1 𝑏𝑖 𝑏𝑖+ 𝑞𝑖2 𝑞𝑖1 𝑞𝑖2
Gambar 8 Grafik fungsi keanggotaan dari kendala fuzzy 𝑎𝑖 𝑋 ≅ 𝑏𝑖.
dengan 𝑏𝑖− 𝑞𝑖1 dan 𝑏𝑖+ 𝑞𝑖2 masing-masing menunjukkan batas bawah toleransi dan batas atas toleransi untuk kendala fuzzy persamaan 𝑎𝑖 𝑋 dengan 𝑞𝑖1 dan 𝑞𝑖2 berturut-turut mendefinisikan toleransi dari kendala fuzzy ke-𝑖 untuk kendala fuzzy persamaan ke-1 dan
kendala fuzzy persamaan ke-2. Nilai toleransi 𝑞𝑖1 dan 𝑞𝑖2 boleh berbeda.
Pada metode fuzzy goal programming, derajat keanggotaan 𝜇(𝑍𝑘(𝑋)) dari suatu tujuan ke-k berada pada selang 0, 1 , sehingga dengan menambahkan variabel deviasi 𝑑𝑘− dan 𝑑𝑘+, fungsi keanggotaan dari tujuan fuzzy dapat direpresentasikan sebagai berikut:
𝜇 𝑍𝑘 𝑋 + 𝑑𝑘−− 𝑑𝑘+= 1,
untuk fungsi keanggotaan dari tujuan tipe ≳ dan ≲ dengan 𝑑𝑘−, 𝑑𝑘+≥ 0, 𝑑𝑘+∙ 𝑑𝑘−= 0, 𝑘 = 1, 2, … , 𝐾. Variabel 𝑑𝑘− dan 𝑑𝑘+ berturut-turut merupakan variabel deviasi yang berada di bawah dan di atas dari derajat keanggotaan tujuan fuzzy ke-𝑘.
Suatu tujuan ke- 𝑘 dikatakan berhasil dicapai bila nilai variabel deviasi 𝑑𝑘− dan 𝑑𝑘+ kurang dari satu. Jika nilai variabel deviasi 𝑑𝑘−> 1, maka akan mengakibatkan derajat keanggotaan 𝜇 𝑍𝑘 𝑋 < 0. Sedangkan jika 𝑑𝑘+> 1, maka akan mengakibatkan nilai fungsi objektif 𝑍𝑘(𝑋) melebihi batas toleransi yang diberikan oleh pembuat keputusan. Semakin nilai variabel deviasi 𝑑𝑘− dan 𝑑𝑘+ dekat dengan 0, semakin besar tingkat keberhasilan tujuan ke-𝑘.
Suatu kendala fuzzy ke-𝑖 memiliki derajat keanggotaan pada selang 0, 1 , sehingga dengan menambahkan variabel deviasi 𝑑𝑖− dan 𝑑𝑖+, fungsi keanggotaan dari kendala tipe ≳ dan ≲ dapat direpresentasikan sebagai berikut:
𝜇 𝑎𝑖 𝑋 + 𝑑𝑖−− 𝑑𝑖+= 1 (1) 𝑑𝑖−, 𝑑𝑖+≥ 0, 𝑑𝑖+⋅ 𝑑𝑖−= 0, 𝑖 = 1, 2, … , 𝑚. 𝑑𝑖− dan 𝑑𝑖+ merupakan variabel deviasi yang berada di bawah dan di atas dari derajat keanggotaan kendala fuzzy ke-𝑖.
Suatu kendala ke-𝑖 dikatakan berhasil dicapai bila nilai variabel deviasi 𝑑𝑖−dan 𝑑𝑖+ kurang dari satu. Jika nilai variabel deviasi 𝑑𝑖−> 1, maka akan mengakibatkan derajat keanggotaan 𝜇 𝑎𝑖 𝑋 < 0. Sedangkan jika 𝑑𝑖+> 1, maka akan mengakibatkan nilai fungsi objektif 𝑎𝑖(𝑋) melebihi batas toleransi yang diberikan oleh pembuat keputusan. Semakin nilai variabel deviasi 𝑑𝑖− dan 𝑑𝑖+ dekat dengan 0, semakin besar tingkat keberhasilan kendala ke-𝑖.
Fungsi keanggotaan untuk kendala fuzzy persamaan merupakan gabungan dari fungsi keanggotaan untuk kendala fuzzy (ai(X))
(ai(X))
pertaksamaan (≳ dan ≲), maka fungsi keanggotaan dari kendala fuzzy persamaan dapat direpresentasikan seperti persamaan (1).
Selanjutnya akan digunakan metode min sum fuzzy goal programming, yaitu suatu metode fuzzy goal programming yang menggunakan fungsi keanggotaan dari fungsi objektif dan fungsi kendala yang dianggap sebagai kendala fuzzy dengan menetapkan derajat tertinggi dari level aspirasi. Metode ini akan meminimumkan variabel deviasi yang berada di bawah tujuan dan kendala fuzzy.
(Gupta dan Bhattacharya 2010b) Menurut Gupta dan Bhattacharya (2010b) metode min sum fuzzy goal programming dapat diformulasikan sebagai berikut:
Tentukan 𝑋 = (𝑥1, 𝑥2, … , 𝑥𝑛) ∈ 𝑅𝑛 yang meminimumkan 1 1 K m k i k i
z
d
d
dengan kendala (1) 𝑍𝑘 𝑋 −(𝑔𝑝 𝑘−𝑝𝑘) 𝑘 + 𝑑𝑘 −− 𝑑 𝑘 += 1, (untuk tujuan tipe ≳)(2) 𝑔𝑘+𝑝𝑘𝑝 −𝑍𝑘 𝑋 𝑘 + 𝑑𝑘
−− 𝑑 𝑘 += 1, (untuk tujuan tipe ≲)
(3) 𝑎𝑖 𝑋 − 𝑏𝑞 𝑖−𝑞𝑖 𝑖 + 𝑑𝑖
−− 𝑑 𝑖 += 1, (untuk kendala tipe ≳) (4) 𝑏𝑖+𝑞𝑖𝑞 −𝑎𝑖 𝑋
𝑖 + 𝑑𝑖 −− 𝑑
𝑖 += 1, (untuk kendala tipe ≲) (5) 𝑏𝑖+𝑞𝑖1𝑞 −𝑎𝑖 𝑋 𝑖1 + 𝑑𝑖 −− 𝑑 𝑖+= 1 𝑎𝑖 𝑥 − 𝑏𝑖−𝑞𝑖2 𝑞𝑖2 + 𝑑𝑖 −− 𝑑 𝑖+= 1 (untuk kendala tipe ≅)
(6) 𝑋, 𝑑𝑘−, 𝑑𝑘+≥ 0; 𝑑𝑘−, 𝑑𝑘+≤ 1; 𝑑𝑘+⋅ 𝑑𝑘−= 0; 𝑘 = 1,2, … , 𝐾
𝑑𝑖−, 𝑑𝑖+≥ 0; 𝑑𝑖−, 𝑑𝑖+≤ 1, 𝑑𝑖+⋅ 𝑑𝑖−= 0; 𝑖 = 1, 2, … , 𝑚.
Dengan menambahkan kendala batas toleransi untuk setiap kendala fuzzy, maka model min sum fuzzy goal programming tersebut dapat dituliskan sebagai berikut: Tentukan 𝑋 = (𝑥1, 𝑥2, … , 𝑥𝑛) ∈ 𝑅𝑛 yang meminimumkan 1 1 K m k i k i
z
d
d
dengan kendala (1) 𝑍𝑘 𝑋 −(𝑔𝑝 𝑘−𝑝𝑘) 𝑘 + 𝑑𝑘 −− 𝑑 𝑘 += 1, (untuk tujuan tipe ≳)(2) 𝑔𝑘+𝑝𝑘𝑝 −𝑍𝑘 𝑋 𝑘 + 𝑑𝑘
−− 𝑑 𝑘+= 1, (untuk tujuan tipe ≲)
(3) 𝑎𝑖 𝑋 − 𝑏𝑞 𝑖−𝑞𝑖 𝑖 + 𝑑𝑖
−− 𝑑 𝑖 += 1, (untuk kendala tipe ≳) (4) 𝑏𝑖+𝑞𝑖𝑞 −𝑎𝑖 𝑋
𝑖 + 𝑑𝑖 −− 𝑑
𝑖 += 1, (untuk kendala tipe ≲) (5) 𝑏𝑖+𝑞𝑖1𝑞 −𝑎𝑖 𝑋 𝑖1 + 𝑑𝑖 −− 𝑑 𝑖+= 1 𝑎𝑖 𝑥 − 𝑏𝑖−𝑞𝑖2 𝑞𝑖2 + 𝑑𝑖 −− 𝑑 𝑖+= 1 (untuk kendala tipe ≅) (6) 𝑔𝑘− 𝑝𝑘≤ 𝑍𝑘 𝑋 ≤ 𝑔𝑘+ 𝑝𝑘
(kendala batas toleransi untuk tujuan tipe ≳ dan ≲)
(7) 𝑏𝑖− 𝑞𝑖 ≤ 𝑎𝑖 𝑋 ≤ 𝑏𝑖+ 𝑞𝑖
(kendala batas toleransi untuk kendala tipe ≳ dan ≲)
(8) 𝑏𝑖− 𝑞𝑖1 ≤ 𝑎𝑖 𝑋 ≤ 𝑏𝑖+ 𝑞𝑖2
(kendala batas toleransi untuk kendala tipe ≅) (9) 𝑋, 𝑑𝑘−, 𝑑𝑘+≥ 0, 𝑝𝑘> 0; 𝑑𝑘−, 𝑑𝑘+≤ 1; 𝑑𝑘+⋅ 𝑑𝑘−= 0; 𝑘 = 1,2, … , 𝐾 𝑑𝑖−, 𝑑𝑖+≥ 0, 𝑞𝑖 , 𝑞𝑖1, 𝑞𝑖2 > 0; 𝑑𝑖−, 𝑑𝑖+≤ 1, 𝑑𝑖+⋅ 𝑑𝑖−= 0; 𝑖 = 1, 2, … , 𝑚. 3.1 Prosedur Pengoptimuman
Tahapan dan diagram alir dari proses pengoptimuman dengan metode fuzzy goal programming dapat direpresentasikan sebagai berikut:
Tahapan proses pengoptimuman memenuhi ketentuan sebagai berikut:
1 formulasikan model fuzzy goal programming,
2 identifikasi tipe fuzzy dari tujuan yang ingin dicapai, yaitu ≳ untuk kasus maksimisasi dan ≲ untuk kasus minimisasi. Kemudian tentukan level aspirasi (𝑔𝑘) untuk tujuan ke-𝑘,
3 ditentukan kendala yang akan menjadi kendala fuzzy,
4 ditentukan nilai toleransi untuk setiap tujuan dan kendala fuzzy kemudian konstruksi fungsi keanggotaan dari tujuan dan kendala fuzzy berdasarkan limit toleransi yang diperoleh,
5 aplikasikan ke dalam model min sum fuzzy goal programming sehingga semua tujuan fuzzy berhasil dicapai,
6 jika semua tujuan fuzzy belum berhasil dicapai, maka kembali ke tahap 2.
Diagram alir untuk proses pengoptimuman diberikan pada Gambar 9 berikut:
Tidak
Ya
Gambar 9 Diagram alir pengoptimuman MLP. Ilustrasi fuzzy goal programming dapat dilihat pada Contoh 4.
Contoh 4
Berdasarkan MLP pada Contoh 1, maka diperoleh formulasi model fuzzy goal programming sebagai berikut:
Tentukan
𝑋 = (𝑥1, 𝑥2, 𝑥3, 𝑥4)
sehingga memenuhi fungsi tujuan (1) 8𝑥1+ 11𝑥2+ 10𝑥3+ 12𝑥4≲ 2700 (2) 𝑥51+𝑥42≳ 32 terhadap kendala (1) 𝑥1+ 𝑥2+ 𝑥3+ 𝑥4≅ 300 (2) 𝑥1≤ 125 (3) 𝑥2≤ 100 (4) 𝑥3≤ 150 (5) 𝑥4≤ 120 (6) 𝑥𝑖 ≥ 0, 𝑖 = 1,2, 3, 4
Fungsi tujuan (1) dan (2) diperoleh dari fungsi tujuan masalah pada Contoh 1. Diasumsikan fungsi tujuan (1) dan (2) merupakan fungsi tujuan fuzzy dan kendala (1) merupakan kendala fuzzy.
Misalkan dipilih batas toleransi 𝑝1= 20 dan 𝑝2= 16 berturut-turut untuk fungsi keanggotaan dari fungsi tujuan fuzzy 𝑍1(𝑋) (kendala pertama) dan 𝑍2 𝑋 (kendala kedua) dan 𝑞11= 50, 𝑞12= 25 untuk fungsi keanggotaan dari kendala fuzzy persamaan 𝑎1 𝑋 (kendala ketiga), maka fungsi keanggotaan untuk setiap tujuan dan kendala fuzzy menjadi:
Fungsi keanggotaan untuk tujuan (1) 1 (Z (X)) 1 1 1 1 1, jika 2680 ( ) 2700 2720 ( ) , jika 2700 ( ) 2720 20 0, jika ( ) 2720 Z X Z X Z X Z X
dengan 𝑍1 𝑋 = 8𝑥1+ 11𝑥2+ 10𝑥3+ 12𝑥4 Fungsi keanggotaan untuk tujuan (2) 2 (Z (X)) 2 2 2 2 0, jika ( ) 16 ( ) 16 , jika 16 ( ) 32 16 1, jika 32 ( ) 48 Z X Z X Z X Z X
dengan 𝑍2 𝑋 =𝑥51+𝑥42 Fungsi keanggotaan untuk kendala (1) 𝜇 𝑎1 𝑋 = 1 1 1 1 1 1 1 jika ( ) 250 0, atau ( ) 325 ( ) 250 , jika 250 ( ) 300 50 1, jika ( ) 300 325 ( ) , jika 300 ( ) 325 25 a X a X a X a X a X a X a X
dengan 𝑎1 𝑋 = 𝑥1+ 𝑥2+ 𝑥3+ 𝑥4Selanjutnya dengan melakukan substitusi setiap fungsi tujuan dan kendala fuzzy ke dalam fungsi keanggotaannya, maka permasalahan tersebut dapat diselesaikan dengan menggunakan metode min sum fuzzy goal programming yang diformulasikan menjadi:
Tentukan
𝑋 = (𝑥1, 𝑥2, 𝑥3, 𝑥4) yang meminimumkan
𝑧 = 𝑑1−+ 𝑑2−+ 𝑑3−+ 𝑑4− Model fuzzy goal programming
Tentukan tipe fuzzy dan nilai 𝑔𝑘 untuk tujuan ke-𝑘
Tentukan kendala fuzzy
Konstruksi fungsi keanggotaan
Model min sum fuzzy goal programming
Apakah semua tujuan berhasil dicapai?