LAPORAN TUGAS AKHIR
LAPORAN TUGAS AKHIR
PERANCANGAN DAN PEMBUATAN PENGISIAN PENAMPUNG AIR PERANCANGAN DAN PEMBUATAN PENGISIAN PENAMPUNG AIR
OTOMATIS BERBASIS MIKROKONTROLER ATmega16 OTOMATIS BERBASIS MIKROKONTROLER ATmega16
O
OL
LE
EH
H
::
I GEDE DIAN OKA SUARJANA
I GEDE DIAN OKA SUARJANA
0805031012
0805031012
JURUSAN D3 TEKNIK ELEKTRONIKA
JURUSAN D3 TEKNIK ELEKTRONIKA
FAKULTAS TEKNIK DAN
FAKULTAS TEKNIK DAN KEJURUAN
KEJURUAN
UNIVERSITAS PENDIDIKAN GANESHA SINGARAJA
UNIVERSITAS PENDIDIKAN GANESHA SINGARAJA
2011
2011
KATA PENGANTAR KATA PENGANTAR
Puji syukur penulis haturkan kehadapan Ida Sang Hyang Widhi Wasa / Puji syukur penulis haturkan kehadapan Ida Sang Hyang Widhi Wasa / Tu
Tuhan han YanYang g MahMaha a EsaEsa, , atas Asung Kerta atas Asung Kerta WarWara a NuNugragraha–Nha–Nya ya kekepada pada penpenulisulis da
dalam lam proproseses s pepenynyeleelesaisaian an TuTugagas s AkAkhihir r dedengngan an jujududull ““ Peranc Perancangan angan dandan
Pembua
Pembuatan tan Pengisian Pengisian PenampunPenampung g Air Air Otomatis Otomatis Berbasis Berbasis MikrokontroMikrokontroller ller Atmega16”
Atmega16” .. TTugugas as AAkkhihir r inini i ddisisususuun n sesebabaggai ai sasalalah h ssatatu u sysyararat at dadalalamm menyelesaikan program Diploma III pada jurusan Teknik Elektronika Universitas menyelesaikan program Diploma III pada jurusan Teknik Elektronika Universitas Pendidikan Ganesha (UNDIKSHA) Singaraja.
Pendidikan Ganesha (UNDIKSHA) Singaraja.
Pada penyusunan Tugas Akhir ini penulis menerima bantuan informasi dan Pada penyusunan Tugas Akhir ini penulis menerima bantuan informasi dan
ker
kerjasajasama ma dari dari berberbagbagai ai pihapihak k baibaik k selselama ama pempembuabuatan tan alat alat ini ini maumaupun selamapun selama penyu
penyusunan lsunan laporan. aporan. Untuk Untuk itu penuitu penulis menlis menyampaikyampaikan rasa hoan rasa hormat darmat dan terima kan terima kasihsih yang sebesar-besarnya kepada :
yang sebesar-besarnya kepada : 1.
1. IbIbu u DrDra. a. I I DeDewa wa AyAyu u MaMade de BuBudhdhyayani, ni, M.M.PdPd., ., seselaklaku u DeDekakan n FaFakukultaltass Teknik dan Kejuruan Universitas Pendidikan Ganesha.
Teknik dan Kejuruan Universitas Pendidikan Ganesha.
2.
2. BaBapak pak NyNyomaoman n SanSantiyatiyadnydnya, a, S,SS,Si., i., M,TM,T., ., selselaku Ketua aku Ketua JurJurusausan n TekTeknik nik
Elektroika Univeritas Pendidikan Ganesha. Elektroika Univeritas Pendidikan Ganesha.
3.
3. Bapak MaBapak Made Santo Gitakde Santo Gitakarma, S.T.,arma, S.T.,M.T. selakM.T. selaku Pembimbu Pembimbing I yang telahing I yang telah memberikan bantuan, arahan, bimbingan dalam proses penyelesaian Tugas memberikan bantuan, arahan, bimbingan dalam proses penyelesaian Tugas Akhir ini.
Akhir ini.
4.
4. BaBapapak k GeGede de WiWidadayayana na ,S,S.T.T.,.,M.M.T T , , seselalaku ku PePembmbimimbibing ng II II yayang ng tetelalahh memberikan bantuan, arahan, bimbingan dalam proses penyelesaian Tugas memberikan bantuan, arahan, bimbingan dalam proses penyelesaian Tugas Akhir ini.
5.
5. BaBapak Siden , pak Siden , MboMbok k KadKadek beserek beserta ta SelSeluruuruh h StaStaf f DoDosen Jurusen Jurusan Teknsan Teknik ik Elektronika yang telah banyak membantu dalam penyusunan Tugas Akhir Elektronika yang telah banyak membantu dalam penyusunan Tugas Akhir
6.
6. TeTerimrimakakasasih ih kekepadpada a BaBapak saypak saya a I I keketutut t SuSuartartana , ana , ibibu u sasaya ya Ni Ni WaWayayann Murjani, nenek dan adik saya yang selalu memberikan dukungan dana dan Murjani, nenek dan adik saya yang selalu memberikan dukungan dana dan doanya. Superman is dead (Bobby,Eka,Jrx) yang sudah menemani saya saat doanya. Superman is dead (Bobby,Eka,Jrx) yang sudah menemani saya saat sedang
sedang jenuh mengjenuh mengetik etik laporan di laporan di rumah.rumah.
7.
7. SemuSemua sahabat saya yg ta sahabat saya yg tidak bisa saya seidak bisa saya sebutkan satu pbutkan satu per satu terima kaser satu terima kasihih atas kebersamaannya dan segala bantuannya.
atas kebersamaannya dan segala bantuannya.
8.
8. TemaTeman-teman sn-teman saya Jaya Jurusan urusan Teknik Teknik ElektrElektronika angonika angkatan kkatan ke-8 e-8 terimakaterimakasihsih atas dukungannya dan segala macam bantuan yang telah diberikan.
atas dukungannya dan segala macam bantuan yang telah diberikan.
Penulis menyadari laporan Tugas Akhir ini masih jauh dari sempurna dan Penulis menyadari laporan Tugas Akhir ini masih jauh dari sempurna dan masih banyak kekurangan. Untuk itu diharapkan kritik dan saran yang bersifat masih banyak kekurangan. Untuk itu diharapkan kritik dan saran yang bersifat membangun guna kesempurnaan Tugas Akhir ini. Semoga Tugas Akhir ini dapat membangun guna kesempurnaan Tugas Akhir ini. Semoga Tugas Akhir ini dapat
berma
bermanfaat bagnfaat bagi pembai pembaca.ca.
Singaraja,
Singaraja, Juli Juli 20112011
Penulis Penulis
PERANCANGAN DAN PEMBUATAN PENGISIAN PENAMPUNG AIR PERANCANGAN DAN PEMBUATAN PENGISIAN PENAMPUNG AIR
OTOMATIS BERBASIS MIKROKONTROLER ATMEGA 16 OTOMATIS BERBASIS MIKROKONTROLER ATMEGA 16
Oleh Oleh
I Gede Dian Oka Suarjana I Gede Dian Oka Suarjana
NIM. 080503101
NIM. 08050310122
Jurusan Teknik Elektronika Jurusan Teknik Elektronika
ABSTRAK ABSTRAK
Per
Perkembkembangan angan teknoteknologi logi elekelektrontronika ika semsemakin akin harhari i semsemakin akin berbertambtambah ah mamaju. ju. SeirSeiringing dengan lajunya percepatan teknologi, membuat banyak orang menjadi termotivasi untuk membuat dengan lajunya percepatan teknologi, membuat banyak orang menjadi termotivasi untuk membuat sesuatu hal yang baru atau sesuatu yang dapat dikendalikan seperti dalam hal pengaturan
sesuatu hal yang baru atau sesuatu yang dapat dikendalikan seperti dalam hal pengaturan level level air.air. Dalam perkemb
Dalam perkembangan teknologi yang angan teknologi yang sangat pesat ini, sudah ada sangat pesat ini, sudah ada yang menerapkan alatyang menerapkan alatwater level water level control system
control system berbasis berbasis PC. PC. Dimana Dimana sistem sistem ini ini masih masih memiliki memiliki kelemahan kelemahan dari dari segi segi penggunaanpenggunaan listrik leb
listrik lebih boros dih boros dan an kesalahan pkesalahan pembacaanembacaan level level air sebeair sebesar 6,72% sar 6,72% untuk batas auntuk batas atas dan 1,3%tas dan 1,3% untuk bata
untuk batas s bawabawah. h. KekKekuranurangan gan terstersebut dapat diatasi dengan membebut dapat diatasi dengan membuat suatu alat uat suatu alat atau sistematau sistem pengisian
pengisian penampung penampung air air berbasis mikrokontroler berbasis mikrokontroler atmega atmega 16 16 dengan dengan menggunakan menggunakan sensor sensor ping ping ultrasonic
ultrasonic untuk mendeteksi volume level air, dimana sensor ping dapat membaca jarak denganuntuk mendeteksi volume level air, dimana sensor ping dapat membaca jarak dengan akurat dari 3cm sampai 3m. Hasil data dari pembacaan sensor ping akan ditampilkan pada LCD akurat dari 3cm sampai 3m. Hasil data dari pembacaan sensor ping akan ditampilkan pada LCD dan dibandingkan dengan data setingan yang nilai datanya dapat diatur dengan potensio. Nilai dan dibandingkan dengan data setingan yang nilai datanya dapat diatur dengan potensio. Nilai yang didapat untuk 1 liter air diwakili oleh 3 cm ketinggian air pada bak penampungan dengan yang didapat untuk 1 liter air diwakili oleh 3 cm ketinggian air pada bak penampungan dengan debit air 0,09 liter/detik.
debit air 0,09 liter/detik.
Kata kunci:
DESIGNING AND MAKING
DESIGNING AND MAKING AUTOMATAUTOMATIC IC REPLENISHMREPLENISHMENT WATER ENT WATER RESERVOIR BASED ON MICROCONTROLLER ATMEGA 16
RESERVOIR BASED ON MICROCONTROLLER ATMEGA 16
By By
I Gede Dian Oka Suarjana I Gede Dian Oka Suarjana
NIM. 080503101
NIM. 08050310122
Electronic Engineering
Electronic Engineering DepartmenDepartmentt
ABSTRACT ABSTRACT Nowadays
Nowadays, , the the development development of of electronic electronic technologies technologies is is becoming becoming increasinglyincreasingly advanced. Along with the accelerating pace of technology makes many people become motivated advanced. Along with the accelerating pace of technology makes many people become motivated to make something new or something that can be controlled like in terms of setting the
to make something new or something that can be controlled like in terms of setting the water level.water level. In a
In a rapirapid d techtechnologinological cal devedevelopmlopments, there ents, there have been have been applapplying the ying the watewater r level controlevel control l systesystemm equipment based on PC. Where this
equipment based on PC. Where this system still has weaknesses in terms of system still has weaknesses in terms of a more wasteful power a more wasteful power usage and water level reading errors by 6, 72 % for the upper limit, and 1,3 % for the lower limit. usage and water level reading errors by 6, 72 % for the upper limit, and 1,3 % for the lower limit. These deficiencies could be overcome by making a device or a reservoir of water filling system These deficiencies could be overcome by making a device or a reservoir of water filling system based on atmega 16 micrometer. By using the ping ultrasonic sensor to detect the volume of water based on atmega 16 micrometer. By using the ping ultrasonic sensor to detect the volume of water
level, where the ping sensor can be
level, where the ping sensor can be read accurately from 3 cm until 3 read accurately from 3 cm until 3 cm. The data results from thecm. The data results from the ping
ping sensor sensor readings readings will will be be displayed displayed on on the the LCD LCD and and compared compared to to the the data data settings settings that that datadata score can be set with potensio. The score obtained for 1 liter of water is represented by 3 cm score can be set with potensio. The score obtained for 1 liter of water is represented by 3 cm height of water in the
height of water in the reservoirreservoirs with water s with water debit 0, 09 liter/ debit 0, 09 liter/ second.second. Key word: water level, micr
DAFTAR ISI DAFTAR ISI
Halaman Halaman KATA PENGANTAR
KATA PENGANTAR ...i...i
ABSTRAK ABSTRAK ...iii...iii
ABSTRA ABSTRACT CT ...iv...iv
DAFTAR ISI DAFTAR ISI...v...v
DARTAR GAMBAR DARTAR GAMBAR ...vii...vii
DAFTAR TABEL DAFTAR TABEL...ix...ix
BAB I PENDAHULUAN BAB I PENDAHULUAN 1.1 Latar Belakang... 1 1.1 Latar Belakang... 1 1.2 Rumusan Masalah... 2 1.2 Rumusan Masalah... 2 1.3 Batasan Masalah... 2 1.3 Batasan Masalah... 2 1.4 Tujuan... 3 1.4 Tujuan... 3 1.5 Manfaat... 3 1.5 Manfaat... 3 1.6 Sistematika Penulisan... 3 1.6 Sistematika Penulisan... 3
BAB II DASAR TEORI BAB II DASAR TEORI 2.1 Mikrokontroler ATMega 16... 5
2.1 Mikrokontroler ATMega 16... 5
2.1.1 Konfigurasi Pin ATMega 16... 6
2.1.1 Konfigurasi Pin ATMega 16... 6
2.1.2 Port Sebagai 2.1.2 Port Sebagai Input/Output Input/Output Digital Digital ... 7... 7
2.1.3 2.1.3 Timer Timer ... 9... 9
2.2 Sensor Ultrasonik ( 2.2 Sensor Ultrasonik (Ultrasonic Ring FinderI)Ultrasonic Ring FinderI)... 10... 10
2.3 2.3 Relay Relay... 14... 14
2.3.1 Prinsip Kerja dan Simbol... 15
2.3.1 Prinsip Kerja dan Simbol... 15
2.4 Pompa Air... 17
2.4 Pompa Air... 17
2.5 2.5 Liquid C Liquid Cristal Displayristal Display (LCD)... 18(LCD)... 18
BAB III METODE PENELITIAN BAB III METODE PENELITIAN 3.1 Rancangan Alat... 20
3.1 Rancangan Alat... 20
3.2 Blok Diagram... 23
3.3 Perancangan Mekanik... 24 3.3 Perancangan Mekanik... 24 3.4 Perancangan 3.4 Perancangan Hardware Hardware... 25... 25 3.4.1 Perancangan Mikrokontroler... 25 3.4.1 Perancangan Mikrokontroler... 25
3.4.2 Perancangan Sensor Ping Ultrasonic... 27
3.4.2 Perancangan Sensor Ping Ultrasonic... 27
3.4.3 Perancangan 3.4.3 Perancangan Driver Driver Pompa... 28Pompa... 28
3.5 Perancangan Rangkaian LCD...29
3.5 Perancangan Rangkaian LCD...29
3.6 Perancangan Rangkaian Pengatur 3.6 Perancangan Rangkaian Pengatur Level Level Air dan TombolAir dan Tombol Start Start ... 30... 30
3.7 Perancangan Rangkaian Keseluruhan... 32
3.7 Perancangan Rangkaian Keseluruhan... 32
3.8 Perancangan 3.8 Perancangan SoftwareSoftware... 33... 33
3.9 Metode Pengumpulan Data... 36
3.9 Metode Pengumpulan Data... 36
BAB BAB IV IV HASIL PENGUJIAN HASIL PENGUJIAN DAN DAN PEMBAHASANPEMBAHASAN 4.1 Hasil Penelitian...37
4.1 Hasil Penelitian...37
4.1.1 Pengujian Catu Daya... 38
4.1.1 Pengujian Catu Daya... 38
4.1.2 Pengujian 4.1.2 Pengujian Driver R Driver Relayelay... 39... 39
4.1.3 Pengujian Mikrokontroler dan LCD... 40
4.1.3 Pengujian Mikrokontroler dan LCD... 40
4.1.4 Pengujian Keseluruhan... 41
4.1.4 Pengujian Keseluruhan... 41
4.1.4.1 Pengujian 4.1.4.1 Pengujian Level Level Air Dalam Tangki Penampungan... 41Air Dalam Tangki Penampungan... 41
4.1.4.2 Pengujian Perbandingan seting 4.1.4.2 Pengujian Perbandingan seting Level Level Air YangAir Yang Terukur Pada Saat Pengisian... 42
Terukur Pada Saat Pengisian... 42
4.2 Pembahasan...43 4.2 Pembahasan...43 BAB V PENUTUP BAB V PENUTUP 5.1 Simpulan...44 5.1 Simpulan...44 5.2 Saran...45 5.2 Saran...45 DAFTAR PUSTAKA DAFTAR PUSTAKA ... 46... 46 LAMPIRAN LAMPIRAN ... 47... 47
DAFTAR GAMBAR DAFTAR GAMBAR
Halaman Halaman
Gambar 2.1 Pin-pin ATMega 16 kemasan 40-pin... 7
Gambar 2.1 Pin-pin ATMega 16 kemasan 40-pin... 7
Gambar 2.2 Blok diagram Gambar 2.2 Blok diagram timer/counter timer/counter ... 10... 10
Gambar 2.3 Sensor Ping... 11
Gambar 2.3 Sensor Ping... 11
Gambar 2.4 Pengukuran lebar pulsa... 12
Gambar 2.4 Pengukuran lebar pulsa... 12
Gambar Gambar 2.5 2.5 Lebar Lebar pulsa...pulsa... ... 1414 Gambar 2.6 Gambar 2.6 Rela Relayy yang yang terstersedia edia di di pasarpasaran...an... 15... 15
Gambar 2.7 Skema Gambar 2.7 Skema relayrelay elektelektromaromagnetignetik...k... ... 1616 Gambar 2.8 Rangkaian dan symbol logika Gambar 2.8 Rangkaian dan symbol logika relayrelay... 16... 16
Gambar 2.9 Pompa air... 17
Gambar 2.9 Pompa air... 17
Gambar Gambar 2.10 2.10 DiagrDiagram am blok blok LCD LCD M1632...M1632... 18.... 18
Gambar 3.1 Diagram alir metodologi penelitian... 20
Gambar 3.1 Diagram alir metodologi penelitian... 20
Gambar Gambar 3.2 3.2 Blok Blok diagrdiagram...am... ... 2323 Gambar Gambar 3.3 3.3 RancaRancangan ngan kontrkontruksi uksi alatalat... 24... 24
Gambar 3.4 Rangkaian pembagian port mikrokontroler ATMega 16... 25
Gambar 3.4 Rangkaian pembagian port mikrokontroler ATMega 16... 25
Gambar Gambar 3.5 Rangkai3.5 Rangkai an pian ping ultrng ultrasonic asonic ke ke mikrokontroler...mikrokontroler... 27... 27
Gambar 3.6 Gambar 3.6 Driv Driver er pompa pompa pendipendingin...ngin... ... 2828 Gambar 3.7 Rangkaian Gambar 3.7 Rangkaian driver driver pompa pompa ke mike mikrokonkrokontroltroler... 29er... 29
Gambar Gambar 3.8 3.8 RangkaRangkaian ian LCD LCD 2x16...2x16... 30... 30
Gambar 3.9 Rangkaian pengatur Gambar 3.9 Rangkaian pengatur level level air dan tombolair dan tombol sta start rt ... 3.. 311 Gambar Gambar 3.10 3.10 RangkaRangkaian ian keselkeseluruhuruhan...an... 32... 32
Gambar 3.11 Algoritma program keseluruhan... 33
Gambar
Gambar 3.12 3.12 AlgoriAlgoritma tma progrprogram am ping...ping...34....34 Gambar 4.1 Algoritma menampilkan tulisan ke LCD... 39 Gambar 4.1 Algoritma menampilkan tulisan ke LCD... 39 Gambar
DAFTAR TABEL DAFTAR TABEL
Halaman Halaman Tabel 2.1 Konfigurasi pin port... 9 Tabel 2.1 Konfigurasi pin port... 9 Tabel 2.2
Tabel 2.2 Fungsi Fungsi pin-ppin-pin in LCD LCD M1632...M1632... 19... 19 Tabel 4.1 Hasil pengujian rangkaian
Tabel 4.1 Hasil pengujian rangkaian power power supsupplyply... 38... 38 Tab
Tabel 4.2 Hasil el 4.2 Hasil pengujianpengujian driver driver pompa air... 38pompa air... 38 Tabel 4.3 Perbandingan
Tabel 4.3 Perbandingan level level air dalam tangki dengan jarak... 41air dalam tangki dengan jarak... 41
Tabel 4.4 Perbandingan
Tabel 4.4 Perbandingan level level air dalam tangki denganair dalam tangki dengan level level air yang ter-air yang ter-ukur... 42 ukur... 42
BAB I BAB I PENDAHULUAN PENDAHULUAN 1 1..11 LLaattaar r BBeellaakkaanngg
Perkembangan teknologi elektronika semakin hari semakin bertambah maju. Perkembangan teknologi elektronika semakin hari semakin bertambah maju. Da
Dalam lam dudunia nia indindusustritri, , elelekektrotroninika ka memememegagang ng peperaranan nan pepentinting ng dadalam lam proprosesess
produ
produksi. ksi. Seiring Seiring dengdengan an lajunya lajunya percepatpercepatan an teknolteknologi, ogi, membumembuat at banyabanyak k orangorang menjadi termotivasi untuk membuat sesuatu hal yang baru, sesuatu yang dapat menjadi termotivasi untuk membuat sesuatu hal yang baru, sesuatu yang dapat dik
dikendendalikalikan an secsecara ara otootomatmatis is dendengan gan menmenggggunakunakan an suasuatu tu sissistem tem yanyang g mudmudahah dio
dioperperasikasikan. an. PadPada a kenkenyatayataannyannya, a, elekelektrontronika ika jugjuga a dapdapat at menmengurgurangangi i bebbebanan
pemer
pemerintah intah dalam dalam hal hal penghpenghematan ematan energenergi i listrik, listrik, dengdengan an alat-alat alat-alat yang yang dapatdapat men
mengheghemat mat listlistrik rik atauataupun pun sumsumber ber daydaya a lainlainnya nya sepseperti erti penpengheghematmatan an air air bilbilaa dipadukan dengan sedikit rangkaian elektronika.
dipadukan dengan sedikit rangkaian elektronika.
Dalam perkembangan teknologi yang pesat ini, sudah ada yang menerapkan Dalam perkembangan teknologi yang pesat ini, sudah ada yang menerapkan ala
alat t seserurupa pa beberbrbasiasis s PCPC. . DiDibeberi ri namnamaa wawater ter levlevel el concontrotrol l syssystemtem (I (I MaMadede
Dw
Dwipayipayanaana,20,201010). ). KelKelemaemahan han dari dari sissistem tem ini ini adaladalah ah masmasih ih memenggnggunaunakan kan PCPC seh
sehinggingga a dari dari segsegi i pengpenggugunaan naan listlistrik rik leblebih ih borboros. os. DalDalam am pengpenggugunaan naan sensensor sor optocoupler juga masih memiliki error dalam pembacaannya yaitu sebesar 6.72% optocoupler juga masih memiliki error dalam pembacaannya yaitu sebesar 6.72% untuk batas atas dan 1.3% untuk batas bawah.
untuk batas atas dan 1.3% untuk batas bawah.
Kekurangan dari sistem diatas dapat diatasi dengan merancang suatu sistem Kekurangan dari sistem diatas dapat diatasi dengan merancang suatu sistem pengis
pengisian ian penampenampung air pung air otomatotomatis is berbasberbasis is mikrokmikrokontroleontroler r ATmeATmega16. Sistem ga16. Sistem iniini
men
menggggunaunakan kan sensensor sor ping yang ping yang mammampu pu memmembaca baca jarajarak k leblebih ih teptepat at dardari i sensensor sor lainnya. Terbukti dalam alat ukur jarak pada kendaraan (Putu Timor Hartawan, lainnya. Terbukti dalam alat ukur jarak pada kendaraan (Putu Timor Hartawan, 201
pemba
pembacaan caan nilai nilai jarak jarak rata-rata rata-rata 1,2% 1,2% untuuntuk k pembapembacaan caan objek objek berupa berupa bendabenda, , dandan 1,
1,5% 5% ununtutuk k obobjejek k mamanunusisia. a. PePengnggugunanaan an mimikrkrokokonontrtrololer er bebertrtujujuauan n ununtutuk k menge
mengefisienkan energi listrik. fisienkan energi listrik. Data yang Data yang diperoldiperoleh eh keluakeluaran ran sensor tersebut akansensor tersebut akan dii
diinpunput t ke ke mikmikrokrokontrontrolleoller r untuntuk uk diprdiproseoses s dan dan digdigunakunakan an untuntuk uk menmengogontrontroll ketinggian air melalui pengoperasian pompa dan menampilkan nilai
ketinggian air melalui pengoperasian pompa dan menampilkan nilai level level air keair ke LCD. Sehingga alat yang dirancang dan dibuat ini mampu membaca ketinggian air LCD. Sehingga alat yang dirancang dan dibuat ini mampu membaca ketinggian air
lebih optimal dari alat sebelumnya yang masih memiliki
lebih optimal dari alat sebelumnya yang masih memiliki error error dan saat dan saat beropeberoperasirasi lebih efisien dalam penggunaan listrik karena tidak lagi menggunakan PC.
lebih efisien dalam penggunaan listrik karena tidak lagi menggunakan PC.
1
1..22 RRuummuussaan Mn Maassaallaahh
Dari latar belakang diatas dapat dirumuskan bagaimanakah cara merancang Dari latar belakang diatas dapat dirumuskan bagaimanakah cara merancang dan
dan memmembuabuat t alat alat penpengisgisian ian penpenampampung ung air air otootomatimatis s berberbasbasis is mikmikrokrokontontroleroler r ATmega16?
ATmega16?
1
1..33 BBaattaassaan Mn Maassaallaahh
Agar tidak meluasnya pokok pembahasan dalam tugas akhir ini, adapun Agar tidak meluasnya pokok pembahasan dalam tugas akhir ini, adapun batasa
batasan masaln masalah yang ah yang ditentuditentukan,yaitkan,yaitu :u : 1.
1. MikMikrokrokontontroleroler yang digr yang digunaunakan adakan adalah ATlah ATmegmega16a16 2.
2. SeSensnsor or yayang ng digdigununakaakan n adadalaalah h momodudul l sesensnsor or PIPING NG dedengngan an janjangkgkauauanan pengu
pengukuran 3kuran 3cm-3m.cm-3m. 3.
3. Level Level air yang diatur maksimal 9 liter air yang diatur maksimal 9 liter
4.
4. PoPompa yampa yang digng digunakunakan adaan adalah polah pompa pmpa pada akada akuaruariumium..
1
Ada
Adapun pun tujutujuan an yanyang g ingingin in dicdicapai apai daladalam m peraperancanncangan gan dan dan pempembuabuatantan pengis
pengisian penampuian penampung air otomatis berbang air otomatis berbasis mikroksis mikrokontroleontroler Atmega16 adalar Atmega16 adalah untuk h untuk merancang alat pengisian penampung air menggunakan mikrokontroler dan sensor merancang alat pengisian penampung air menggunakan mikrokontroler dan sensor PING yang mampu mengontrol kondisi
PING yang mampu mengontrol kondisi level level air.air.
1.5 Manfaat 1.5 Manfaat
Adapun manfaat dari perancangan dan pembuatan pengisian penampung air Adapun manfaat dari perancangan dan pembuatan pengisian penampung air otomatis berbasis mikrokontroler Atmega16 ini adalah :
otomatis berbasis mikrokontroler Atmega16 ini adalah : 1. Sebagai alternatife alat
1. Sebagai alternatife alat pengispengisian air ian air otomatotomatis is yang dikembyang dikembangkaangkan dann dan diaplikasikan di masyarakat maupun di dunia industri. Misalnya pada diaplikasikan di masyarakat maupun di dunia industri. Misalnya pada
pengis
pengisian ian air air minum isi minum isi ulangulang, , penampenampung air pung air dalam rumah dalam rumah tanggtangga a dandan lain-lain.
lain-lain. 2.
2.UnUntutuk k memenamnambabah h pepengngetaetahuhuan an dadan n wawawawasasan n tetentantang ng peperarancancangnganan pengis
pengisian penaian penampung mpung otomaotomatis ini.tis ini.
1.6
1.6 Sistematika Sistematika PenulisanPenulisan
Sistematika penulisan yang penulis gunakan dalam penyusunan tugas akhir Sistematika penulisan yang penulis gunakan dalam penyusunan tugas akhir (TA) ini, yaitu:
(TA) ini, yaitu:
BAB I PENDAHULUAN BAB I PENDAHULUAN
Membahas Latar Belakang, Rumusan masalah, Batasan Masalah, Tujuan, Membahas Latar Belakang, Rumusan masalah, Batasan Masalah, Tujuan, Manfaat, dan Sistematika Penulisan.
Manfaat, dan Sistematika Penulisan.
BAB II DASAR TEORI BAB II DASAR TEORI
Memuat teori-teori yang digunakan sebagai acuan dan yang berhubungan Memuat teori-teori yang digunakan sebagai acuan dan yang berhubungan dengan penulisan tugas akhir (TA) ini.
BAB III METODOLOGI BAB III METODOLOGI
Me
Memuamuat t RanRancangcangan an PenPenelitelitian, ian, PerPerencaencanaan naan TekTeknis, nis, ProProses ses PemPembuabuatantan Alat, Lokasi Penelitian, Subjek Penelitian, dan Metode Pengumpulan Data .
Alat, Lokasi Penelitian, Subjek Penelitian, dan Metode Pengumpulan Data .
BAB IV HASIL PENGUJIAN DAN PEMBAHASAN BAB IV HASIL PENGUJIAN DAN PEMBAHASAN
Memuat Hasil Pengujian dan Pembahasan. Memuat Hasil Pengujian dan Pembahasan.
BAB V PENUTUP BAB V PENUTUP
Berisikan Kesimpulan dan Saran. Berisikan Kesimpulan dan Saran.
BAB II BAB II
DASAR TEORI DASAR TEORI
2.1
2.1 MikrokontMikrokontroler roler ATmega16ATmega16
AVR merupakan seri mikrokontroler CMOS 8-bit buatan Atmel, berbasis AVR merupakan seri mikrokontroler CMOS 8-bit buatan Atmel, berbasis arsitektur
arsitektur RISC RISC (Reduced (Reduced Instruction Instruction Set Set ComputeComputer r ). ). HamHampir pir semsemua ua insinstruktruksisi diekse
dieksekusi dalam kusi dalam satu siklussatu siklus clock clock . AVR mempunyai 32 register . AVR mempunyai 32 register general-purpo general-purpose,se,
timer/counter fleksibel
timer/counter fleksibel dengdengan an modemode comparecompare,, interrupt internal interrupt internal dandan eksternal eksternal ,, serial UART,
serial UART, programm programmableable Watchdog Timer Watchdog Timer , dan, dan mode power saving mode power saving , ADC dan, ADC dan PW
PWM M inteinternalrnal. . AVAVR R jugjuga a memmempunpunyai yai InIn-Sys-System tem ProProgramgrammabmable le FlasFlash h on-con-chiphip ya
yang ng memengngijiijinknkan an mememomori ri prprogogram ram ununtutuk k didiproprogrgram am ululang ang dadalam lam sysyststemem
menggunakan hubungan serial SPI. ATMega16. menggunakan hubungan serial SPI. ATMega16.
ATMega16 mempunyai
ATMega16 mempunyai throughput throughput mendekati 1 MIPS per MHz membuatmendekati 1 MIPS per MHz membuat dis
disaineainer r sissistem tem untuntuk uk menmengogoptimptimasi asi konkonsusumsi msi daydaya a verversus sus keckecepaepatan tan proprosesses.. Beberapa keistimewaan dari AVR ATMega16 antara lain:
Beberapa keistimewaan dari AVR ATMega16 antara lain: 1)
1) Memo Memoryry ProgramProgram Flash Pe Flash Peromrom 16 Kbyte16 Kbyte
2)
2) Memo Memoryry data jenis SRAM 1Kbytedata jenis SRAM 1Kbyte 3)
3) Memo Memoryry EEPROM 512 ByteEEPROM 512 Byte 4
4)) 332 2 x x 88 General PurposeGeneral Purpose Register Register 5
5)) 3322 Pin Pin Input – Output Input – Output yang dapat diprogramyang dapat diprogram 6
6)) SSeerriiaal Ul USSAARRT yT yaanng dg daappaat dt diipprrooggrraamm 7
7)) CCoommppaarraattoor r AAnnaalloog g
8)
8) Output Output PWM empat kanalPWM empat kanal 9)
9) 88 Chanel Chanel ADC 10 bitADC 10 bit 1
1
111)) SSeebbuuaahh Timer / Counter Timer / Counter 16 bit16 bit
2.1.1
2.1.1 Konfigurasi Pin ATMega 16Konfigurasi Pin ATMega 16
Konfigurasi pin ATMega 16 bisa dilihat pada gambar 2.1. Dari gambar Konfigurasi pin ATMega 16 bisa dilihat pada gambar 2.1. Dari gambar terseb
tersebut ut dapat dijelaskan secara dapat dijelaskan secara fungsfungsional konfiguraional konfigurasi si pin ATMega 16 pin ATMega 16 sebagasebagaii beriku
berikut :t :
1.
1. VCC mVCC merupakerupakan pin an pin yang yang berfungberfungsi sebsi sebagai pin agai pin masukmasukan catu an catu dayadaya 2.
2. GNGND D memerurupapakakan pn pinin ground ground 3.
3. Port A Port A (PA0(PA0..PA7..PA7) merupa) merupakan pin kan pin I/O duI/O dua arah daa arah dan pin mn pin masukaasukan ADCn ADC 4.
4. PorPort B (PB0.t B (PB0..PB.PB7) meru7) merupakpakan pin I/O duan pin I/O dua arah dan pin fua arah dan pin fungsngsi khusi khusus, yaius, yaitutu timer
timer //counter counter , komparator analog, dan SPI, komparator analog, dan SPI
5.
5. PorPort C (PC0.t C (PC0..PC.PC7) meru7) merupakpakan pin I/O duan pin I/O dua arah dan pin fua arah dan pin fungsngsi khusi khusus, yaius, yaitutu TWI, komparator analog, dan
TWI, komparator analog, dan timer timer oscilator oscilator 6.
6. PorPort D t D (PD(PD0..P0..PD7D7) merupa) merupakan pin I/O dukan pin I/O dua arah dan pin funa arah dan pin fungsi khugsi khususus, yaitus, yaitu komparator analog, interupsi eksternal dan komunikasi serial
komparator analog, interupsi eksternal dan komunikasi serial
7.
7. RESET RESET merupakan pin yang digunakan untuk mereset mikrokontroler merupakan pin yang digunakan untuk mereset mikrokontroler 8.
8. XTXTAL1 AL1 dan Xdan XTATAL2 meL2 meruparupakan kan pin mpin masuasukankan clock clock eksternaleksternal 9.
9. AVAVCC meCC meruprupakan pakan pin masin masukaukan tegan tegangangan untun untuk ADCk ADC 10.
Gambar 2.1
Gambar 2.1 Pin-pin ATMega16 Kemasan 40-pinPin-pin ATMega16 Kemasan 40-pin
Pin-pin pada ATMega16 dengan kemasan 40-pin DIP (
Pin-pin pada ATMega16 dengan kemasan 40-pin DIP ( dual inline packagedual inline package)) ditunjukkan oleh gambar 2.1. Guna memaksimalkan
ditunjukkan oleh gambar 2.1. Guna memaksimalkan perform performa, AVR mengga, AVR menggunakanunakan
arsitektur
arsitektur Harvard Harvard (dengan memori dan(dengan memori dan bus t bus terpisah uerpisah untuk pntuk program rogram dan dadan data).ta).
2
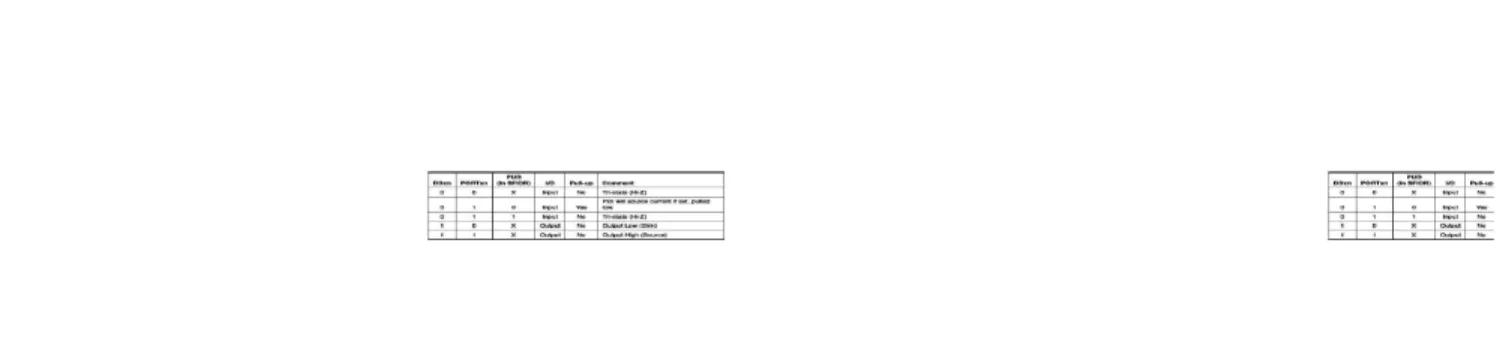
2..11..22 PPoorrt St Seebbaaggaaii Input/Outpu Input/Output Digital t Digital AT
ATMegMega16 a16 memmempunpunyai yai emempat pat buabuah h porport t yanyang g berbernamnamaa PortA, PortA, PortBPortB,, PortC
PortC, , dan dan PortDPortD. Keempat port tersebut merupakan jalur . Keempat port tersebut merupakan jalur bidirectional bidirectional dengandengan pilihan
pilihan internal pull-upinternal pull-up. Tiap port mempunyai tiga. Tiap port mempunyai tiga buah register buah register bit, bit, yaitu yaitu DDxDDxn,n,
PORTxn, dan PINxn. Huruf ‘x’mewakili
PORTxn, dan PINxn. Huruf ‘x’mewakili nama huruf dari port sedangkan huruf ‘n’nama huruf dari port sedangkan huruf ‘n’ mewakili nomor bit. Bit
mewakili nomor bit. Bit DDxn terdapat pada I/ODDxn terdapat pada I/O addressaddress DDRDDRx, x, bit bit PORPORTxnTxn terdapat padaI/O address PORTx, dan bit PINxn terdapat pada I/O
terdapat padaI/O address PORTx, dan bit PINxn terdapat pada I/O addressaddress PINx.PINx. Bit DDxn dalam register DDRx (
Bit DDxn dalam register DDRx ( Data Directio Data Direction Register n Register ) menentukan arah) menentukan arah pin. Bila
ma
maka ka Px Px beberfurfungngsi si sesebabagagai i pinpin input input . . BBilila a PPOORTRTxn xn didiseset t 1 1 papada da sasaat at pipinn ter
terkonkonfigufigurasrasi i sebsebagai agai pin pin inpinput, ut, makmaka a resresistoistor r pull-up pull-up akan diaktifkan. Untuk akan diaktifkan. Untuk mematik
mematikan an resistoresistor r pull-up pull-up, PORTxn harus diset 0 atau pin dikonfigurasi sebagai, PORTxn harus diset 0 atau pin dikonfigurasi sebagai pin
pin output output . Pin port adalah. Pin port adalah tri-statetri-state setelah kondisi reset. Bila PORTxn diset 1 padasetelah kondisi reset. Bila PORTxn diset 1 pada saat pin terkonfigurasi sebagai pin
saat pin terkonfigurasi sebagai pin output output maka pin port akan maka pin port akan berlogberlogika 1. ika 1. Dan bilaDan bila PORTxn diset 0 pada saat pin terkonfigurasi sebagai pin
PORTxn diset 0 pada saat pin terkonfigurasi sebagai pin output output maka pin port akanmaka pin port akan
berlog
berlogika ika 0. 0. Saat Saat mengmengubah ubah kondkondisi isi port port dari dari kondkondisiisi tri-statetri-state (DDxn=0,(DDxn=0, PORTxn=0) ke kondisi
PORTxn=0) ke kondisi output highoutput high (DDxn=1, PORTxn=1) maka harus ada kondisi(DDxn=1, PORTxn=1) maka harus ada kondisi peraliha
peralihan n apakah apakah itu itu kondkondisiisi pull-up pull-up enabled enabled (DDx(DDxn=0, n=0, PORTPORTxn=1) xn=1) atau atau kondkondisiisi output low
output low (DDxn=1, PORTxn=0).(DDxn=1, PORTxn=0).
Biasan
Biasanya, ya, kondkondisiisi pull-up pull-up enabled enabled dapdapat at ditediterima rima sepsepenuenuhnyhnya, a, selaselamama lingkungan impedansi tinggi tidak memperhatikan perbedaan antara sebuah
lingkungan impedansi tinggi tidak memperhatikan perbedaan antara sebuah strong strong high driver
high driver dengan sebuahdengan sebuah pull-up pull-up. Jika ini bukan suatu masalah, maka bit PUD. Jika ini bukan suatu masalah, maka bit PUD pada
pada registeregister r SFIOSFIOR R dapat dapat diset diset 1 1 untuk mematikan untuk mematikan semuasemua pull-up pull-up dalam semuadalam semua port.
port. PeralihaPeralihan n dari dari kondkondisiisi input input dengdengan an pull-pull-upup ke ke kondkondisiisi outoutput put lowlow juga juga
men
menimbimbulkulkan an masmasalaalah h yang yang samsama. a. KitKita a haruharus s menmenggggunakunakan an konkondisdisii tri-statetri-state (DDxn=0, PORTxn=0) atau kondisi
(DDxn=0, PORTxn=0) atau kondisi output highoutput high (DDx(DDxn=1, n=1, PORTPORTxn=0) xn=0) sebagsebagaiai kondisi transisi.
kondisi transisi.
Tabel 2.1
Bit 2 – PUD :
Bit 2 – PUD : Pull-up D Pull-up Disableisable
Bila bit diset bernilai 1 maka
Bila bit diset bernilai 1 maka pull-up pull-up pada pada port port I/O I/O akan akan dimatikdimatikan an walaupwalaupunun register
register DDxn dan PORTxn dikonfigurasikan untuk menyalakanDDxn dan PORTxn dikonfigurasikan untuk menyalakan pull-up pull-up (DDxn=0,(DDxn=0, PORTxn=1).
PORTxn=1).
2.1.3
2.1.3 Timer Timer
Timer/counter
Timer/counter adadalaalah h fasfasiliilitas tas dadari ri ATATMeMegaga16 16 yayang ng digdigununakakan an ununtutuk k perhitu
perhitungan ngan pewakpewaktuan. tuan. BeberaBeberapa pa fasilitasfasilitas chanel chanel daridari timer counter timer counter antara lain:antara lain: counter channel
counter channel tunggal, pengosongan data timer sesuai dengan data pembanding,tunggal, pengosongan data timer sesuai dengan data pembanding, bebas
bebas -- glitch glitch, , tahtahap ap yayang ng tetepatpat Pulse Pulse WidWidth th MoModulatdulation ion (PW(PWM),M), pemb pembangkitangkit frekuensi,
frekuensi, event counter event counter external.external...
Gambar diagram
Gambar diagram blocblock k timetimer/cor/counter unter 8 bit ditunjukan pada gambar 2.2.8 bit ditunjukan pada gambar 2.2. Untuk penempatan pin I/O telah di jelaskan pada bagian I/O di atas. CPU dapat Untuk penempatan pin I/O telah di jelaskan pada bagian I/O di atas. CPU dapat diakses register I/O, termasuk dalam pin-pin I/O dan bit I/O.
diakses register I/O, termasuk dalam pin-pin I/O dan bit I/O. Device Device khusus register khusus register I/O dan lokasi bit terdaftar pada deskripsi
Gambar 2.2
Gambar 2.2 Blok DiagramBlok Diagram Timer/Counter Timer/Counter
2
2..22 SSeennssoor r UUllttrraassoonniik k ((Ultrasonic Ring Finder)Ultrasonic Ring Finder) Ultrasonic
Ultrasonic merupakan frekuensi yang lebih tinggi dari 20.000Hz yang manamerupakan frekuensi yang lebih tinggi dari 20.000Hz yang mana untuk jen
untuk jenis suara ini diatas batas suais suara ini diatas batas suara yang bisa didenra yang bisa didengar oleh manugar oleh manusia. sia. SepertiSeperti
diketahui, telinga manusia hanya bisa mendengar suara dengan frekuensi 20Hz diketahui, telinga manusia hanya bisa mendengar suara dengan frekuensi 20Hz sa
sampmpai ai 2020KHKHz. z. LeLebih bih dadari ri itu itu hahanynya a bebebeberaprapa a jejenis nis bibinatnatanang g yayang ng mamampmpuu me
mendndenengagarnyrnya, a, sesepeperti rti kekelellelawaawar r dadan n lulumbmba-la-lumumbaba. . LuLumbmba- a- lulumbmba a babahkhkanan memanfaatkan
memanfaatkan ultrasonicultrasonic untuntuk uk menmenginginderdera a benbenda-bda-bendenda a di di lautlaut. . PrinPrinsip sip iniini kemudian ditiru oleh system pengindera kapal selam. Dengan cara mengirimkan kemudian ditiru oleh system pengindera kapal selam. Dengan cara mengirimkan
se
sebubuah ah susuara ara dadan n memengnghithitunung g lamlamananya ya panpantutulan lan susuara ara tetersersebubut t mamaka ka dadapapatt diketahui jarak kapal selam dengan benda tersebut. Mula- mula suara dibunyikan, diketahui jarak kapal selam dengan benda tersebut. Mula- mula suara dibunyikan, kem
kemudiudian an dihidihituntung g lamlama a wakwaktu tu samsampai pai terdterdengengar ar suasuara ra panpantultulan. an. JarJarak ak dapdapatat dihitung dengan mengalikan kecepatan suara dengan waktu pantulan kemudian dihitung dengan mengalikan kecepatan suara dengan waktu pantulan kemudian hasilnya dibagi 2.
Ada beberapa hewan lainnya yang mampu mendengar frekuensi ini dengan Ada beberapa hewan lainnya yang mampu mendengar frekuensi ini dengan baik. C
baik. Contohnontohnya anjingya anjing, hewan i, hewan ini mampni mampu mendu mendengar sengar sampai 25ampai 25.00.000Hz dan k0Hz dan kucingucing mampu mendengar sampai 65.000Hz.
mampu mendengar sampai 65.000Hz. Gel
Gelombombang ang ultultrasorasonik nik dipdiprodroduksuksi i dendengan gan menmenggggunaunakankan transduser transduser electromecanic
electromecanic, , cacara ra kekerjrja a trtranansdsdususer er tetergrganantutung ng papada da dudua a efefek ek yayaititu u efefek ek piezoelektr
piezoelektrik ik dandan magnetic striksimagnetic striksi..
Ping
Ping Ultrasocic Ultrasocic Range Range Finder Finder , , adadalalah ah momodudul l pepengngukukur ur jarjarak ak dedengnganan ultrasonic
ultrasonic buatan parallax Inc. Yang didesign khusus untuk teknologi robotika.buatan parallax Inc. Yang didesign khusus untuk teknologi robotika. Dengan ukurannya yang cukup kecil (2,1cm X 4,5cm), sensor ini dapat mengukur Dengan ukurannya yang cukup kecil (2,1cm X 4,5cm), sensor ini dapat mengukur jarak antara
jarak antara 3 Cm 3 Cm sampasampai i 300 Cm. 300 Cm. keluakeluaran dari ran dari ping berupa pulsa yang ping berupa pulsa yang lebarnyalebarnya
merepresentasikan jarak. Lebar pulsanya bervariasi dari 115 uS sampai 18,5 mS. merepresentasikan jarak. Lebar pulsanya bervariasi dari 115 uS sampai 18,5 mS. Gambar 2.3 merupakan gambar fisik dari
Gambar 2.3 merupakan gambar fisik dari Ping U Ping Ultrasonic Rltrasonic Range Finange Finder.der.
Gambar 2.3 Sensor Ping Gambar 2.3 Sensor Ping
Ping terdiri dari sebuah chip pembangkit sinyal 40KHz, sebuah speaker Ping terdiri dari sebuah chip pembangkit sinyal 40KHz, sebuah speaker ultrasonic
ultrasonic dan sebuah mikrofondan sebuah mikrofon ultrasonicultrasonic. Speaker . Speaker ultrasonicultrasonic mengubah sinyal 40mengubah sinyal 40 KH
KHz z menmenjadi suara sementjadi suara sementara ara mikmikroforofon n berberfungfungsi si untuntuk uk menmendetdetekseksi i panpantulatulann suaranya. Pada modul ping terdapat 3 pin yang digunakan untuk jalur
suaranya. Pada modul ping terdapat 3 pin yang digunakan untuk jalur power supply power supply
(+5V),
langsung dihubungkan dengan mikrokontroler tanpa tambahan komponen apapun. langsung dihubungkan dengan mikrokontroler tanpa tambahan komponen apapun. Ping mendeteksi objek dengan cara mengirimkan suara
Ping mendeteksi objek dengan cara mengirimkan suara ultrasonicultrasonic dan kemudiandan kemudian “me
“mendendengangarkanrkan” ” pantpantulaulan n suasuara ra terstersebuebut. t. PinPing g hanyhanya a akaakan n memengirngirimkaimkan n suasuarara ultrasonic
ultrasonic ketika ada pulsaketika ada pulsa trigger trigger dari mikrokontroler (Pulsa High Selama 5uS).dari mikrokontroler (Pulsa High Selama 5uS). Suara
Suara ultrasonicultrasonic dengan frekuensi sebesar 40KHz akan dipancarkan selama 200uS.dengan frekuensi sebesar 40KHz akan dipancarkan selama 200uS. Suara ini kan merambat di udara dengan kecepatan 344.424m/detik (atau 1 cm Suara ini kan merambat di udara dengan kecepatan 344.424m/detik (atau 1 cm
set
setiap iap 29.29.034034uSuS), ), menmengegenai nai objobjek ek untuntuk uk kemkemudiudian an terterpantpantul ul kemkembali bali ke ke PingPing.. Selama menunggu pantulan, Ping akan menghasilkan sebuah pulsa. Pulsa ini akan Selama menunggu pantulan, Ping akan menghasilkan sebuah pulsa. Pulsa ini akan berhen
berhenti (ti ( Low Low) ketika ) ketika suara pantulan terdetesuara pantulan terdeteksi oleh ksi oleh Ping. Data pulsa high sebelumPing. Data pulsa high sebelum sen
sensor sor ping meneriping menerima ma panpantulatulan n frefrekuekuensi nsi yanyang g dipdipancancarkaarkan n akaakan n dicadicacah cah dandan
dibandingkan dengan pulsa
dibandingkan dengan pulsa trigger trigger . Oleh karena itulah lebar pulsa tersebut dapat. Oleh karena itulah lebar pulsa tersebut dapat merepre
merepresentasiksentasikan an jarak jarak antara Ping antara Ping dengadengan n objekobjek. . SelanjutSelanjutnya nya mikrokmikrokontroleontroler r cukup mengukur lebar pulsa tersebut dan mengkonversinya dalam bentuk jarak cukup mengukur lebar pulsa tersebut dan mengkonversinya dalam bentuk jarak seperti pada Gambar 2.4.
seperti pada Gambar 2.4.
Gambar 2.4. Pengukuran Lebar Pulsa Gambar 2.4. Pengukuran Lebar Pulsa Diman
Dimana a diketahudiketahui i hubuhubungan antara ngan antara kecepatkecepatan an dan jarak dan jarak dinyatadinyatakan dengankan dengan
rumus sebagai berikut: rumus sebagai berikut:
S=V x t S=V x t Keterangan: Keterangan:
S= Jarak yang akan ditempuh S= Jarak yang akan ditempuh V= Kecepatan suara gelombong
V= Kecepatan suara gelombong ultrasonicultrasonic (344,424 m/s)(344,424 m/s) T= waktu yang dibutuhkan
T= waktu yang dibutuhkan Namu
Namun n karena karena gelomgelombang bang ultasoultasonik nik mengakmengakibatkan ibatkan pantulpantulan, an, makamaka pantul
pantulannya annya adalah adalah ½ ½ (seteng(setengah) ah) dari dari jarak jarak tempuh tempuh keselurkeseluruhan uhan sehingsehinggaga persam
persamaan diaaan diatas menjatas menjadi:di:
S= S=
Seh
Sehingingga ga dari dari perspersamaamaan an diadiatas tas kita kita jugjuga a bisa bisa memenentnentukaukan n wakwaktu tu yanyangg diperlukan gelombang
diperlukan gelombang ultrasonicultrasonic untuk mencapai suatu jarak.untuk mencapai suatu jarak.
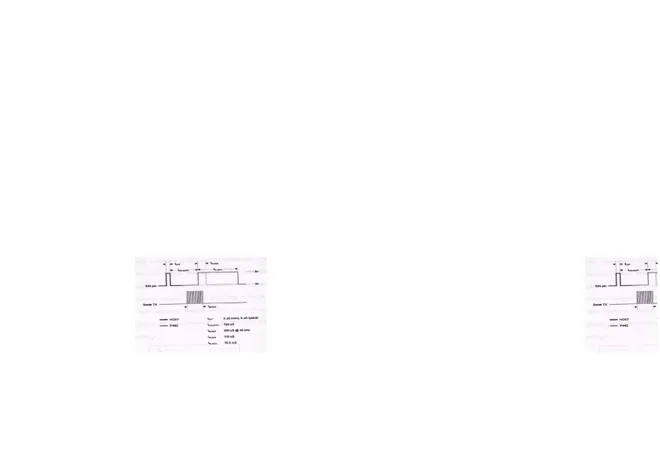
Gambar 2.5. dibawah merupakan gambar lebar pulsa dari Ping
Gambar 2.5. dibawah merupakan gambar lebar pulsa dari Ping UltrasonicUltrasonic Range F
Range Finder.inder.
Gambar 2.5 Lebar Pulsa Gambar 2.5 Lebar Pulsa
2.3
2.3 Relay Relay Dal
Dalam am dundunia ia elekelektrontronika,ika, relayrelay dikdikenaenal l sebsebagaagai i kokompomponen nen yanyang g dapdapatat meng
mengimplemeimplementasikantasikan n logikalogika switching switching . . SebSebeluelum m tahtahun un 7070an,an, relayrelay merupakanmerupakan “o
“otatak” k” ddarari i rarangngkakaiaian n pepengngeendndalali. i. KKememududiaian n mmununcucul l PPLLC C yayang ng mumulalaii menggantikan posisi
menggantikan posisi relayrelay.. Relay
Relay yang paling sederhana ialahyang paling sederhana ialah relayrelay elektromekanis yang memberikanelektromekanis yang memberikan
perge
pergerakan rakan mekanmekanis is saat saat mendapmendapatkan atkan energi energi listrik. listrik. Secara Secara sederhasederhanana relayrelay elektromekanis ini didefinisikan sebagai berikut :
elektromekanis ini didefinisikan sebagai berikut : •
• AlaAlat t yanyang g memenggnggunaunakan kan gaygaya a eleelektroktromagmagnetinetik k untuntuk uk menmenutuutup p (ata(atauu membuka) kontak saklar.
membuka) kontak saklar.
• Saklar yang digerakkan (secara mekanis) oleh daya/energi listrik. • Saklar yang digerakkan (secara mekanis) oleh daya/energi listrik. Di bawah ini contoh
Di bawah ini contoh relayrelay yang beredar di pasaran :yang beredar di pasaran :
Gambar 2.6
Gambar 2.6 Relay Relay Yang Tersedia di PasaranYang Tersedia di Pasaran
Secara umum,
Secara umum, relayrelay digunakan untuk memenuhi fungsi – fungsi berikut :digunakan untuk memenuhi fungsi – fungsi berikut :
•
• Remo Remote control te control : dapat menyalakan atau mematikan alat dari jarak jauh: dapat menyalakan atau mematikan alat dari jarak jauh
•
• Penguatan daya : menguatkan arus atau teganganPenguatan daya : menguatkan arus atau tegangan
Contoh :
Contoh : starting relay starting relay pada me pada mesin mosin mobilbil
•
2.
2.3.3.11 PrPrininsisip Kep Kerjrja daa dan Sin Simbmbolol Relay
Relay teterdirdiri ri dadari ri kokoilil dadan n kokontantak. k. PePerharhatiktikan an gagambmbar ar 2.2.7, 7, kokoilil adalahadalah gulun
gulungan kawat yang gan kawat yang mendamendapat arus pat arus listrik, sedang kontak listrik, sedang kontak adalah sejenis saklar adalah sejenis saklar yang pergera
yang pergerakannya tergantukannya tergantung dari ng dari ada tidaknya arus listrik di ada tidaknya arus listrik di koil.koil. Contact Contact ada 2ada 2 jenis
jenis :: Norma Normally lly OpenOpen (kond(kondisi isi awal sebelum awal sebelum diaktifkdiaktifkanan openopen), dan), dan Norma Normallylly Closed
Closed (kondisi awal sebelum diaktifkan(kondisi awal sebelum diaktifkan closeclose).).
Secara sederhana berikut ini prinsip kerja dari
Secara sederhana berikut ini prinsip kerja dari relayrelay : ketika koil: ketika koil mendapatmendapat ene
energi rgi listlistrik rik ((energized energized ), ), akaakan n timbtimbul ul gaygaya a eleelektroktromagmagnet net yanyang g akaakan n menmenarik arik armature
armature yang berpegas, dan kontak yang berpegas, dan kontak akan menutup.akan menutup.
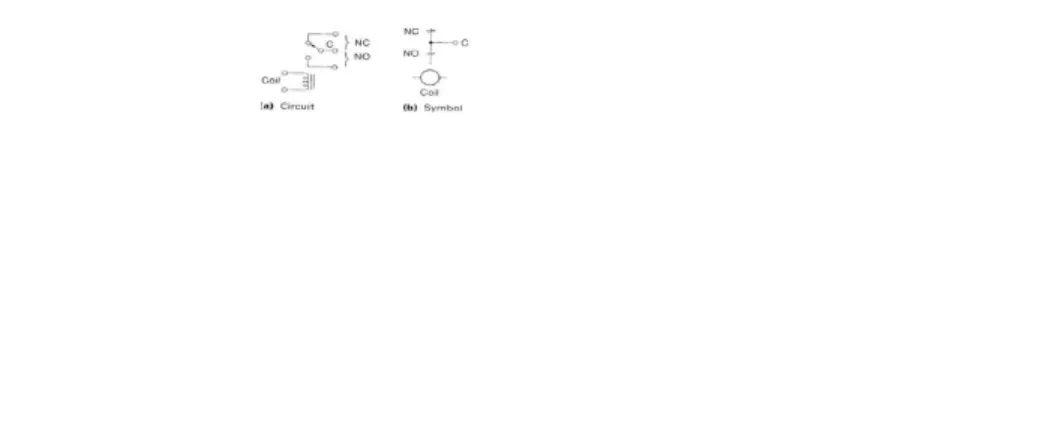
Gambar 2.7 Skema
Gambar 2.7 Skema Relay Relay Elektromekanik Elektromekanik
Sel
Selain ain berberfungfungsi si sebsebagaagai i komkomponponen en elekelektrontronik,ik, relayrelay juga juga mempumempunyainyai fungs
fungsi i sebagsebagai ai pengenpengendali dali sistemsistem. . SehingSehinggaga relayrelay mempunyai 2 macam simbolmempunyai 2 macam simbol
yang digunakan pada : yang digunakan pada :
•
• Rangkaian listrik (Rangkaian listrik (hardwarehardware))
•
• Program (Program ( software software))
Berikut ini simbol yang digunakan : Berikut ini simbol yang digunakan :
Gambar 2.8 Rangkaian dan Simbol Logika
Gambar 2.8 Rangkaian dan Simbol Logika Relay Relay
2
2..44 PPoommppa a AAiirr Po
Pompa mpa adaladalah ah suasuatu tu alat alat yanyang g digdigunaunakan kan untuntuk uk menmenaikaikkan kan caircairan an daridari
permu
permukaan kaan yang yang rendah rendah ke ke permupermukaan kaan lebih lebih tinggtinggi. i. Pompa Pompa merupamerupakan kan peralatanperalatan ya
yang ng susudadah h memenjanjadi di ststanandar dar dadalalam m kekehidhidupupan an seseharhari-hi-hariari, , babahkhkan an mumungngkikinn beber
beberapa apa puluh puluh tahun tahun ke ke depan depan tetap tetap menjadmenjadi i pilihan pilihan utama utama dalam dalam mengmengatasiatasi kebutuhan akan debit air bersih yang cukup untuk dipakai dalam harian, seperti kebutuhan akan debit air bersih yang cukup untuk dipakai dalam harian, seperti mi
minunum, m, memencncuci uci bajbaju, u, mamandndi, i, dadan n yayang ng tidtidak ak boboleleh h didilulupakpakan an yayaitu itu sisistestemm pembu
pembuangan angan limbah. limbah. Pada Pada perkemperkembangbangannya, annya, pompa pompa berkeberkembang mbang sangasangat t pesatpesat
dimana pompa air mempunyai jenis yang beragam tapi pada dasarnya pompa yang dimana pompa air mempunyai jenis yang beragam tapi pada dasarnya pompa yang sampai saat ini masih sering digunakan adalah jenis sentrifugal.
sampai saat ini masih sering digunakan adalah jenis sentrifugal. Pada pompa sentrifugal terdapat
Pada pompa sentrifugal terdapat berbagberbagai ai kompokomponen penting impeller nen penting impeller yangyang berfung
berfungsi si mengmengalirkan alirkan fluida fluida dan dan motor motor penggpenggerak erak yang yang berfunberfungsi gsi menggmenggerakkanerakkan impeller. Motor penggerak pada pompa ada dua yaitu motor AC dan motor DC. impeller. Motor penggerak pada pompa ada dua yaitu motor AC dan motor DC. Untuk keperlu
Untuk keperluan an kontrokontrol, l, biasanybiasanya a digundigunakan pompa motor akan pompa motor DC, karena DC, karena motor DCmotor DC
mudah dikontrol dan cocok digunakan dalam kontrol simulasi atau pemodelan. mudah dikontrol dan cocok digunakan dalam kontrol simulasi atau pemodelan.
Gambar 2.9 Pompa Air Gambar 2.9 Pompa Air
2.5
2.5 Liquid Cristal Display ( Liquid Cristal Display ( LCD)LCD) Mo
Modudul l peperagraga a yayang ng didigugunaknakan an dadalalam m apapliklikasasi i inini i adadalaalah h LCLCD D momodudull
M1632. Modul LCD ini membutuhkan daya yang kecil dan dilengkapi dengan M1632. Modul LCD ini membutuhkan daya yang kecil dan dilengkapi dengan panel LC
panel LCD dengan tingD dengan tingkat kontras yakat kontras yang cukung cukup tinggi serta pengp tinggi serta pengendali LCD CMendali LCD CMOSOS yang terpasang dalam modul tersebut. Pengendali mempunyai pembangkit karakter yang terpasang dalam modul tersebut. Pengendali mempunyai pembangkit karakter ROM/RAM dan display data RAM. Semua fungsi
ROM/RAM dan display data RAM. Semua fungsi displaydisplay diatur oleh instruksi-diatur oleh instruksi-instruksi, sehingga modul LCD ini dapat dengan mudah dihubungkan dengan unit instruksi, sehingga modul LCD ini dapat dengan mudah dihubungkan dengan unit mikroprosesor. LCD tipe ini tersusun sebanyak dua baris dengan 16 karakter.
mikroprosesor. LCD tipe ini tersusun sebanyak dua baris dengan 16 karakter.
Mas
Masukaukan n yang yang dipediperlurlukan kan untuntuk uk menmengengendalidalikan kan modmodul ul berberupa upa data data bubuss yang masih tergabung dengan bus alamat serta 3 bit sinyal kontrol. Sementara yang masih tergabung dengan bus alamat serta 3 bit sinyal kontrol. Sementara penge
pengendalian LCD ndalian LCD dilakudilakukan kan secarasecara internal internal oleh kontroler yang terpasang dalamoleh kontroler yang terpasang dalam modul LCD. Diagram blok LCD dapat dilihat pada gambar 2.10.
modul LCD. Diagram blok LCD dapat dilihat pada gambar 2.10.
Gambar 2.10 Diagram Blok LCD M1632 Gambar 2.10 Diagram Blok LCD M1632
LCD M1632 mempunyai 16 pin atau penyemat yang mempunyai LCD M1632 mempunyai 16 pin atau penyemat yang mempunyai fungsi-fungsi seperti ditunjukkan dalam tabel 2.2.
fungsi seperti ditunjukkan dalam tabel 2.2.
Tabel 2.2
Tabel 2.2 Fungsi Pin-pin LCD M1632Fungsi Pin-pin LCD M1632
N
Noo NNaamma a ppeennyyeemmaatt FFuunnggssii 1
1 VVssss TTeerrmmiinnaall ground ground 2
2 VVcccc TTeeggaannggaan n ccaattu u ++5 5 vvoolltt 3
3 VVeeee DDrriivve e LLCCDD
4
4 RSRS
Sinyal pemilih register Sinyal pemilih register 0: Instruksi register (tulis) 0: Instruksi register (tulis)
1: Data Register (tulis dan baca) 1: Data Register (tulis dan baca)
5
5 RR//WW
Sinyal seleksi tulis atau baca Sinyal seleksi tulis atau baca 0: Tulis 0: Tulis 1: Baca 1: Baca 6 6 EE
Sinyal operasi awal, sinyal ini mengaktifkan data Sinyal operasi awal, sinyal ini mengaktifkan data tulis dan baca
tulis dan baca
7
7 – – 1144 DDBB00--DDBB77
Merupakan saluran data, berisi perintah dan data Merupakan saluran data, berisi perintah dan data yang akan ditampilkan
yang akan ditampilkan
1
155 VV+ + BBLL
Pengendali kecerahan latar belakang LCD 4 Pengendali kecerahan latar belakang LCD 4 -4,42 V dan 50 – 500 mA
4,42 V dan 50 – 500 mA 1
166 VV--BBLL PPeennggeennddaalli i kkeecceerraahhaan n llaattaar r bbeellaakkaanng g LLCCD D 0 0 VV
BAB III BAB III METODOLOGI PENELITIAN METODOLOGI PENELITIAN 3.1 Rancangan Alat 3.1 Rancangan Alat Memasukkan Memasukkan program program padapada mikrokontroler mikrokontroler A A Mula Mula ii
Ya Ya
Y
Yaa TTiiddaakk
Ya Ya \\ Tidak Tidak Ya Ya
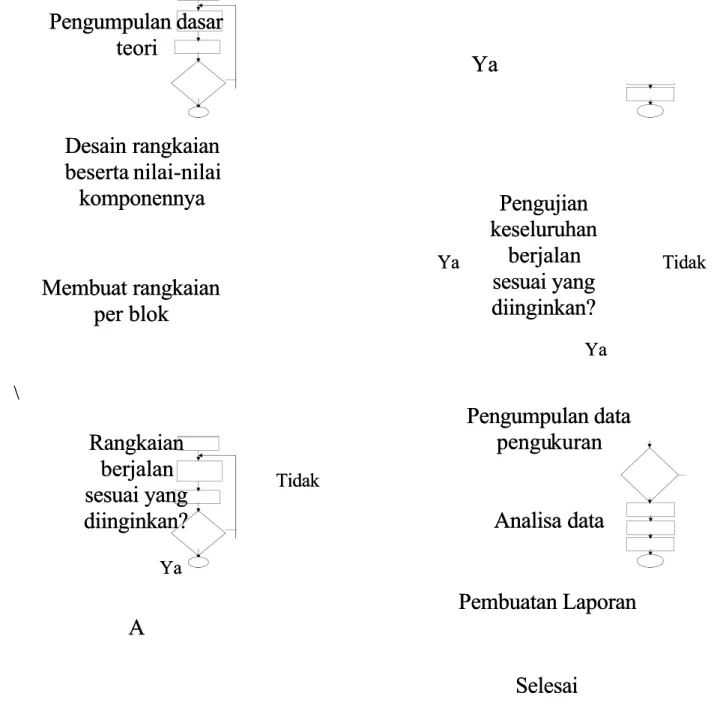
Gambar 3.1 Diagram Alir Metodologi Penelitian Gambar 3.1 Diagram Alir Metodologi Penelitian
Gam
Gambar bar 3.1 3.1 mermerupaupakan kan gamgambar bar alur alur pempembuabuatan tan daladalam m tugtugas as akhakhir ir ini.ini. adapun beberapa tahapan dalam perancangan dan pembuatan Pengisian Penampung adapun beberapa tahapan dalam perancangan dan pembuatan Pengisian Penampung Air Otomatis
Air Otomatis BerbasBerbasis is MikrokMikrokontoleontoler r ATmeATmega16 sesuai ga16 sesuai dengan data-data yangdengan data-data yang telah dikumpulkan baik dari buku-buku maupun dari perencanaan sendiri.
telah dikumpulkan baik dari buku-buku maupun dari perencanaan sendiri. 1.
1. TaTahahapapan n perpertamtama a yayang ng didilaklakukukan an adadalaalah h memelaklakukukan an pepengngumumpupulalan n dadasasar r
teori yang berkaitan dengan alat yang akan dibuat. Hal ini dilakukan untuk teori yang berkaitan dengan alat yang akan dibuat. Hal ini dilakukan untuk memudahkan teknik perencanaan rangkaian, penentuan nilai-nilai komponen memudahkan teknik perencanaan rangkaian, penentuan nilai-nilai komponen dan pemahaman karakteristik komponen yang dipakai.
dan pemahaman karakteristik komponen yang dipakai. Pengumpulan dasar Pengumpulan dasar teori teori Desain rangkaian Desain rangkaian beserta
beserta nilai-nilainilai-nilai komponennya komponennya Membuat rangkaian Membuat rangkaian per blok per blok Pengujian Pengujian keseluruhan keseluruhan berjalan berjalan sesuai yang sesuai yang diinginkan? diinginkan? Pengumpulan data Pengumpulan data pengu pengukurankuran Analisa data Analisa data Rangkaian Rangkaian berjalan berjalan sesuai yang sesuai yang diinginkan? diinginkan? A A Pembuatan Laporan Pembuatan Laporan Selesai Selesai
2.
2. TaTahahapapan n kekedudua a yayaitu itu memelalakukukakan n peperarancancangngan an dedesasain in ranrangkgkaiaaian n bebesesertarta nila
nilai-nii-nilai lai komkomponponen en yang yang terterpasapasang ng berberdasdasarkaarkan n hashasil il perhperhitunitungan gan yanyangg didapat.
didapat. 3.
3. TaTahahapapan n keketigtiga a yayaitu itu memelalakukukakan n pepengngumumpupulalan n kokompmponeonen-kn-komompoponenenn ele
elektktronronika ika yayang ng akakan an didipakpakai ai dadalam lam pepenynyususununan an ranrangkgkaiaaian n yayang ng tetelahlah ditentukan berdasarkan hasil perancangan.
ditentukan berdasarkan hasil perancangan.
4.
4. TahTahap keemap keempat yaitu melpat yaitu melakuakukan uji coba rangkan uji coba rangkaiakaian pada masin pada masing-ng-masmasinging blok
blok rangkarangkaian ian modumodul l sensosensor r ultrultrasonasonic, ic, drivdriver er pompa pompa dan dan rangkarangkaianian mik
mikrokrokontrontroleoler r ATATMegMega a 16 16 sebsebagaagai i puspusat at proproses ses penpengolgolahaahan n datdata a sensensor sor den
dengan gan memmemberberikan ikan catu catu daydaya a DC DC padpada a rangrangkaiakaian, n, makmaka a dapdapat at dikdiketahetahuiui
operasi kerja yang dihasilkan oleh masing-masing blok rangkaian. Apabila pada operasi kerja yang dihasilkan oleh masing-masing blok rangkaian. Apabila pada ra
rangngkakaian ian ada ada yayang ng memengngalaalami mi pepermrmasasalaalahanhan, , mamaka ka dildilakakukukan an ananalalisaisa ke
kerurusasakakan, n, kekesalsalahaahan n pepengnggugunaanaan n ataatau u pepemamasasangngan an kokompmpononen en dadan n jikjikaa memungkinkan rangkaian dapat dimodifikasi atau memperbaiki perancangan memungkinkan rangkaian dapat dimodifikasi atau memperbaiki perancangan rang
rangkaiakaian. n. ApaApabila bila ranrangkagkaian ian sudsudah ah bekbekerja erja sessesuai uai dendengagan n haraharapan pan makmakaa
dilakukan tahap berikutnya. dilakukan tahap berikutnya. 5.
5. TahTahap kelimap kelima yaitu melaa yaitu melakukkukan uji rangkan uji rangkaian kesaian keselureluruhauhan. Apabn. Apabila operila operasiasi kerja rangkaian mengalami permasalahan, maka dilakukan analisa kerusakan, kerja rangkaian mengalami permasalahan, maka dilakukan analisa kerusakan, kesalahan penggunaan atau pemasangan komponen dan jika memungkinkan kesalahan penggunaan atau pemasangan komponen dan jika memungkinkan rangkaian dapat dimodifikasi atau memperbaiki perancangan rangkaian.
rangkaian dapat dimodifikasi atau memperbaiki perancangan rangkaian. 6.
6. Tahap Tahap keenam keenam yaitu myaitu melakukelakukan mendan mendesain pesain pola rangola rangkaian pakaian pada papada papan PCn PCBB
ses
sesuai uai dendengan gan polpola a rangrangkaiakaian n yanyang g telatelah h menmengalgalami ami uji uji cobcoba. a. DesDesain ain padpadaa papan PC
papan PCB meliputi penggB meliputi penggambaran jalurambaran jalur-jalur rangkaia-jalur rangkaian pada papan PCB yangn pada papan PCB yang di
ferriclorida
ferriclorida agar didapatkan pola yang diinginkan. Kemudian akan dilakukanagar didapatkan pola yang diinginkan. Kemudian akan dilakukan penge
pengeboran boran jalur-jalujalur-jalur r tersebtersebut ut sesuai sesuai dengan dengan letak letak kaki-kakkaki-kaki i kompkomponen onen yangyang akan dipasangkan.
akan dipasangkan. 7.
7. Pada taPada tahap kethap ketujuh akaujuh akan dilakun dilakukan pekan pemasangmasangan koman komponenponen-komp-komponen ponen padaada papan
papan PCB PCB yang yang telah telah diberikadiberikan n pola pola dan dan diberi diberi lubanlubang g untuk untuk menemmenempatkanpatkan kaki-kaki komponen sesuai dengan posisi masing-masing yang telah ditentukan kaki-kaki komponen sesuai dengan posisi masing-masing yang telah ditentukan
dari hasil rancangan sebelumnya. dari hasil rancangan sebelumnya. 8.
8. PaPada da tatahap kedehap kedelaplapan an didilaklakukukan an ujuji i cocoba ba rarangngkakaian kembian kembali pada ali pada papapapann PC
PCB B tetersersebubut. t. ApApababila ila dadalam lam ujuji i cocoba ba memengngalaalami mi pepermrmasasalalahaahan, n, mamakaka dilakukan analisa kegagalan atau kesalahan dalam mendesain rangkaian beserta dilakukan analisa kegagalan atau kesalahan dalam mendesain rangkaian beserta
nilai-nilai kompo
nilai-nilai komponennyanennya. . Jika rangkaian pada Jika rangkaian pada papan PCB sudah bekerja papan PCB sudah bekerja sesuasesuaii ha
haraprapanan, , mamaka ka prprososes es pepembmbuauatatan n rarangngkakaian ian alalat at pepengngisiisian an pepenanampmpunung g air air otomatis berbasis mikrokontroler sudah selesai.
otomatis berbasis mikrokontroler sudah selesai.
3.2
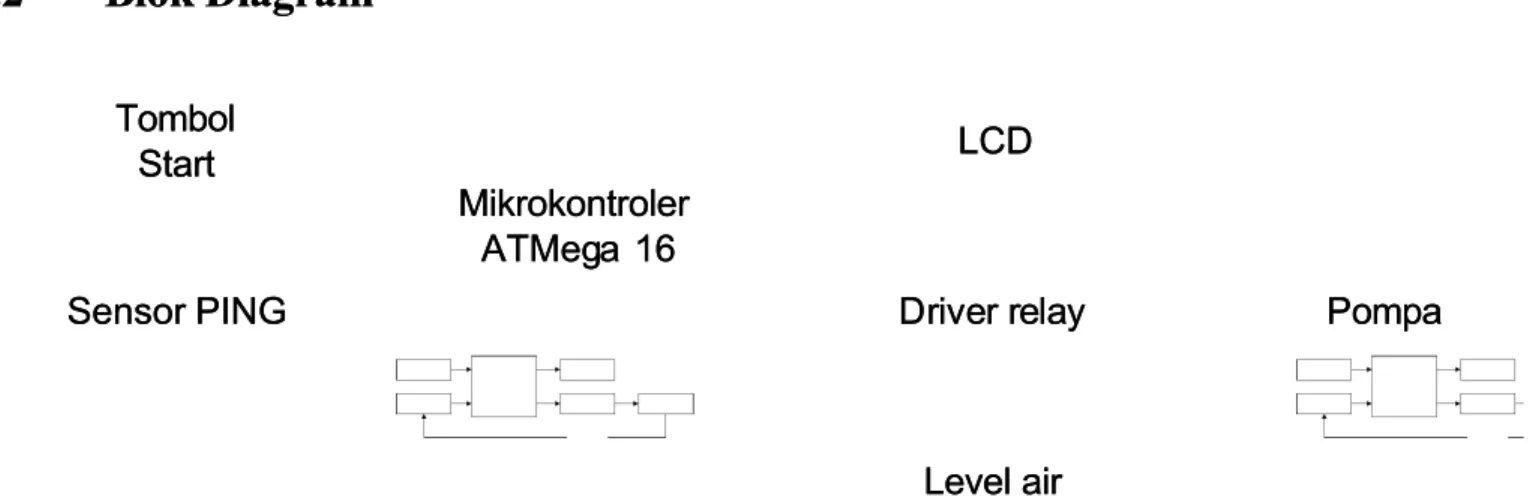
3.2 Blok Blok DiagramDiagram
Mikrokontroler Mikrokontroler ATMeg ATMega a 1616 Sensor PING Sensor PING Tombol Tombol Start Start LCDLCD D
Drriivveer r rreellaayy PPoommppaa
Level air Level air
Gambar 3.2 Blok Diagram Gambar 3.2 Blok Diagram
•
Sistem
Sistem alat alat ini ini menggunakan menggunakan mikrokontroler mikrokontroler sebagai sebagai pengendalipengendali ut
utamamananyaya. . SebSebagagai ai ininpuput t digdigununakaakan n pempembabacacaan an ketketinginggiagian n air air dardarii sensor ping
sensor ping yang datanya yang datanya akan akan diolah didalam diolah didalam mikrokontroler. Sebagaimikrokontroler. Sebagai output
output digunakan pompa air dan LCD untuk menampilkandigunakan pompa air dan LCD untuk menampilkan levellevel air yangair yang sudah
sudah terukurterukur. . Alat Alat ini ini dibuat dibuat bertujuan bertujuan untuk untuk mempemempermudrmudah ah dalamdalam pengisian penampung air karena dirancang secara otomatis.
pengisian penampung air karena dirancang secara otomatis. Se
Sensnsor or PINPING G ulultratrasosoninic c padpada a tutugas gas akhakhir ir inini i berberfufungngsi si ununtutukk mendeteksi kondisi
mendeteksi kondisi levellevel air pada bak penampungan dan data hasilair pada bak penampungan dan data hasil se
sennsosor r didikokonnveversrsi i memennjajadi di vovolulumme e aiair r dadalalam m sasatutuan an liliteter r ololeheh mikrokontroler. Volume air yang diperoleh nantinya akan ditampilkan ke mikrokontroler. Volume air yang diperoleh nantinya akan ditampilkan ke LCD dan digunakan untuk mengendalikan keadaan pompa air. Pompa LCD dan digunakan untuk mengendalikan keadaan pompa air. Pompa akan
akan ONON apabila ditekan tombol “apabila ditekan tombol “Start Start ”, data volume air yang terukur”, data volume air yang terukur nan
nantinytinya a akan akan dibadibandindingkngkan an dendengan gan data data setisetingangann levellevel air. air. ApabApabilaila volume air yang terukur didalam tangki sama dengan nilai setingan, volume air yang terukur didalam tangki sama dengan nilai setingan, maka pompa air akan
maka pompa air akan OFF OFF dan proses pengisian air ke tangki akandan proses pengisian air ke tangki akan sele
selesai. sai. UntuUntuk k menmenghidghidupkupkan an dan dan memmematikatikan an pompompa pa air air digudigunakanakann rangkaian
rangkaian driver relay driver relay yang nantinya menyambung dan memutuskanyang nantinya menyambung dan memutuskan arus AC 220 V yang masuk ke pompa air.
arus AC 220 V yang masuk ke pompa air. Input driver relay Input driver relay adalahadalah keluaran dari mikrokontroler berdasarkan volume air hasil konversi jarak keluaran dari mikrokontroler berdasarkan volume air hasil konversi jarak level
level air yang disensor oleh sensor PING ultrasonic.air yang disensor oleh sensor PING ultrasonic.
3.3 Perancangan Mekanik 3.3 Perancangan Mekanik
Bentuk mekanik yang direncanakan pada proyek akhir ini ditunjukkan oleh Bentuk mekanik yang direncanakan pada proyek akhir ini ditunjukkan oleh
Gambar 3.3 sebagai berikut : Gambar 3.3 sebagai berikut :
Gambar 3.3 Racangan Kontruksi Alat Gambar 3.3 Racangan Kontruksi Alat
Potensio 1 dalam alat ini digunakan untuk mengatur kecerahan pada LCD, Potensio 1 dalam alat ini digunakan untuk mengatur kecerahan pada LCD, unt
untuk uk menmenyetyeting ing banbanyakyaknya nya air air yanyang g diidiinginginkankan n daldalam am satsatuan uan liteliter r digdigunaunakankan
potens
potensio io 2. 2. PompPompa a digudigunakan nakan untuk untuk menyemenyedot dot air air dari dari bak bak sumbsumber er ke ke bak bak penam
penampungpungan. Data an. Data banyakbanyaknya air nya air yang dibaca oleh yang dibaca oleh sensosensor r ping akan ditampilkanping akan ditampilkan pada L
pada LCD yaCD yang nantng nantinya akainya akan dibann dibandingkdingkan dengan dengan data san data setinganetingan. Pros. Proses penges pengisianisian akan berhenti apabila data pembacaan sensor ping sama dengan data setingan awal akan berhenti apabila data pembacaan sensor ping sama dengan data setingan awal level air yang dimasukkan menggunakan pengaturan potensio.
level air yang dimasukkan menggunakan pengaturan potensio.
3.4 Perancangan Hardware 3.4 Perancangan Hardware
Pe
Peranrancancangagan n dadan n pepembmbuauatantan hardwarehardware inini i memelilipuputi ti bebebeberarapa pa blblok ok komponen, antara lain mikrokontroler, sensor ping,
komponen, antara lain mikrokontroler, sensor ping, driver driver pompa pompa, rangkaian LCD,, rangkaian LCD, rangkaian pengatur level air dan tombol
3.4.1
3.4.1 PerancangaPerancangan n MikrokontroMikrokontrolerler
Dalam perencanaan rangkaian minimum sistem mikrokontroler ini adalah Dalam perencanaan rangkaian minimum sistem mikrokontroler ini adalah meng
menggunakgunakan an mikrokmikrokontroleontroler r ATMeATMega ga 16. Gambar 16. Gambar 3.4 3.4 menunmenunjukkan rangkaianjukkan rangkaian pemba
pembagian pogian port mikrort mikrokontrolkontroler dalam er dalam pembupembuatan tuatan tugas akgas akhir ini.hir ini.
1 11 1 3311 10 10 G GNN D D GGNN DD VC VC CC 22 22 23 23 24 24 25 25 26 26 27 27 28 28 29 29 14 14 15 15 16 16 17 17 18 18 19 19 20 20 21 21 PC PC0/ S0/ S CLCL PC1/ SDA PC1/ SDA PC2/ TCK PC2/ TCK PC3/ TMS PC3/ TMS PC4/ TDO PC4/ TDO PC5/ TDI PC5/ TDI PC6/ PC6/ TOSTOS CC11 PC7/ TOS PC7/ TOS CC22 PD0/ RXD PD0/ RXD PD1/TXD PD1/TXD PD2/INT0 PD2/INT0 PD3/ INT1 PD3/ INT1 PD4/ OC1B PD4/ OC1B PD5/OC1A PD5/OC1A PD6 PD6/ / ICPICP PD7/OC2 PD7/OC2 A A T T E E M M e e g g a a 1 1 6 6 40 40 39 39 38 38 37 37 36 36 35 35 34 34 33 33 1 1 2 2 3 3 4 4 5 5 6 6 7 7 8 8 9 9 13 13 12 12 32 32 PA0/ AD PA0/ AD CC00 PA1/ AD PA1/ AD CC11 PA2/ AD PA2/ AD CC22 PA3/ AD PA3/ AD CC33 PA4/ AD PA4/ AD CC44 PA5/ AD PA5/ AD CC55 PA6/ AD PA6/ AD CC66 PA7/ AD PA7/ AD CC77 PB0/T0 PB0/T0 PB1/T1 PB1/T1 PB PB2/ A2/ A IN0IN0 PB PB3/ A3/ A IN1IN1 PB PB4/S4/S SS PB PB5/ MOS5/ MOS II PB6 PB6 /M/MISOISO P B P B7 / S7/ S C KC K / / RERE SESE TT 30 30 X X TATA LL11 X X TATA LL22 A R E F A R E F A V C C A V C C 22pF 22pF 11 11,, 05920592 MHz MHz 22pF 22pF Sensor PING Ultrasonic Sensor PING Ultrasonic
+5V +5V +5V +5V + + 5V5V 100nF 100nF 1 1 K K Reset Reset Driver Motor Driver Motor
LC
LCD
D
GND GND GND GND Potensio 5 Potensio 5 0 K0 K Tombol start Tombol startGambar 3.4 Rangkaian Pembagian Port Mikrokontroler ATMega 16 Gambar 3.4 Rangkaian Pembagian Port Mikrokontroler ATMega 16 Berdasarkan gambar 3.4, mikrokontroler merupakan rangkaian kontrol Berdasarkan gambar 3.4, mikrokontroler merupakan rangkaian kontrol utama untuk mengolah data-data input dari tombol, potensio dan sensor ping yang utama untuk mengolah data-data input dari tombol, potensio dan sensor ping yang
nantinya akan digunakan untuk mengatur kondisi pompa air serta menampilkan nantinya akan digunakan untuk mengatur kondisi pompa air serta menampilkan data-data hasil proses ke LCD.
data-data hasil proses ke LCD. Port I/O mikrokontroler yang diguPort I/O mikrokontroler yang digunakan pada tugasnakan pada tugas akhir ini adalah :
akhir ini adalah : 1.
1. Port A.0 Port A.0 digunakadigunakan sebn sebagai agai saluran saluran input Ainput ADC yanDC yang nantg nantinyainya mengolah data tegangan dari pengaturan potensio menjadi data mengolah data tegangan dari pengaturan potensio menjadi data digital
digital dalam mikrokontrolerdalam mikrokontroler 2.
2. Port Port B.0 B.0 digudigunaknakan an untuntuk suk saluraluranan input input sensorsensor Ping UltrasonicPing Ultrasonic 3.
4.
4. Port Port C.0 C.0 digudigunakanakan sn sebagebagai sai salualuranran output output mikrokontroler untukmikrokontroler untuk mengendalikan
mengendalikan pompa pompa air air melaluimelalui driver driver pompa.pompa. 5.
5. Port Port D diD digungunakan akan sebasebagai gai salusaluranran output output mikrokontroler yangmikrokontroler yang nantinya menampilkan data-data hasil pengolahan di
nantinya menampilkan data-data hasil pengolahan di
mikrokontroler ke LCD. Pin port D yang digunakan adalah : mikrokontroler ke LCD. Pin port D yang digunakan adalah :
•
• Pin D.0 dihubungkan dengan pin kontrol RS pin LCDPin D.0 dihubungkan dengan pin kontrol RS pin LCD
•
• Pin D.1 dihubungkan dengan pin kontrol E pin LCDPin D.1 dihubungkan dengan pin kontrol E pin LCD •
• Pin D.2 dihubungkan dengan pin kontrol R/W pin LCDPin D.2 dihubungkan dengan pin kontrol R/W pin LCD
•
• Pin D.4 dihubungkan dengan pin saluran data (D4) LCDPin D.4 dihubungkan dengan pin saluran data (D4) LCD
•
• Pin D.5 dihubungkan dengan pin saluran data (D5) LCDPin D.5 dihubungkan dengan pin saluran data (D5) LCD
•
• Pin D.6 dihubungkan dengan pin saluran data (D6) LCDPin D.6 dihubungkan dengan pin saluran data (D6) LCD
•
• Pin D.7 dihubungkan dengan pin saluran data (D7) LCDPin D.7 dihubungkan dengan pin saluran data (D7) LCD
3.4.2
3.4.2 PerancangaPerancangan n Sensor Sensor PING PING UltrasonicUltrasonic
Sensor PING ultrasonic dalam tugas akhir ini adalah menggunakan modul Sensor PING ultrasonic dalam tugas akhir ini adalah menggunakan modul PING ultrasonic yang memiliki jarak 3 cm s/d 3 Meter. Pada modul PING ini PING ultrasonic yang memiliki jarak 3 cm s/d 3 Meter. Pada modul PING ini mem
memilikiliki i tiga tiga buabuah h termterminalinal. . TerTerminaminal l pertpertama ama mermerupaupakan kan inpinput ut untuntuk uk GNDGND,,
terminal kedu
terminal kedua merupakan input tegangaa merupakan input tegangan + n + 5 volt 5 volt dan terminal ke tiga dan terminal ke tiga merupmerupakanakan terminal untuk mengirim dan menerima sinyal ultrasonic. Gambar 3.5 menunjukkan terminal untuk mengirim dan menerima sinyal ultrasonic. Gambar 3.5 menunjukkan rangkaian modul PING ultrasonic ke mikrokontroler ATMega 16.
1 11 1 3311 10 10 G GNND D GGNNDD VC VC CC 22 22 23 23 24 24 25 25 26 26 27 27 28 28 29 29 14 14 15 15 16 16 17 17 18 18 19 19 20 20 21 21 PC0 PC0/SCL/SCL PC1 PC1/SDA/SDA PC2/TCK PC2/TCK PC3/TMS PC3/TMS PC4/TDO PC4/TDO PC5/TDI PC5/TDI PC6/ TO PC6/ TO SCSC11 PC7/TOS PC7/TOS CC22 PD0 PD0/RXD/RXD PD1/TXD PD1/TXD PD2/INT0 PD2/INT0 PD3/INT1 PD3/INT1 PD4/OC1B PD4/OC1B PD5/OC1A PD5/OC1A PD6/ICP PD6/ICP PD7/OC2 PD7/OC2 A A T T E E M M e e g g a a 1 1 6 6 40 40 39 39 38 38 37 37 36 36 35 35 34 34 33 33 1 1 2 2 3 3 4 4 5 5 6 6 7 7 8 8 9 9 13 13 12 12 32 32 PA0/AD PA0/AD C0C0 PA1/AD PA1/AD C1C1 PA2/AD PA2/AD C2C2 PA3/AD PA3/AD C3C3 PA4/AD PA4/AD C4C4 PA5/AD PA5/AD C5C5 PA6/AD PA6/AD C6C6 PA7/AD PA7/AD C7C7 PB0/T0 PB0/T0 PB1/T1 PB1/T1 PB2/AIN0 PB2/AIN0 PB3/AIN1 PB3/AIN1 PB4/SS PB4/SS PB5/MOSI PB5/MOSI PB6/MISO PB6/MISO PB PB7/SCK7/SCK / RE / RE SESE TT 30 30 XTA XTA LL11 XTA XTA LL22 A R E F A R E F A V C C A V C C 22pF 22pF 11 11,, 05920592 MHz MHz 22pF 22pF +5V +5V +5V +5V + +5V5V 100nF 100nF 1 1 K K Reset Reset GND GND +5V +5V GND GND GND GND GND GND
Gambar 3.5 Rangkaian Ping Ultrasonic ke Mikrokontroler Gambar 3.5 Rangkaian Ping Ultrasonic ke Mikrokontroler
3
3..44..33 PPeerraannccaannggaann Driver Driver PompaPompa Dalam
Dalam perancanperancangangan driver driver pompa dibuat dengan menggunakan rangkaianpompa dibuat dengan menggunakan rangkaian transistor sebagai saklar. Transistor ini akan mengaktifkan dan mematikan relay transistor sebagai saklar. Transistor ini akan mengaktifkan dan mematikan relay JZC-20F. Relay ini yang akan mengatur hubungan motor dengan terminal sumber JZC-20F. Relay ini yang akan mengatur hubungan motor dengan terminal sumber teg
tegangangan an ACAC, , sehsehinggingga a akan akan menmengakgakibatibatkan kan motmotor or ON ON . . RanRancancangan gan rangrangkaiakaiann driver