BAB I
PENDAHULUAN
1.1 PendahuluanLaporan Kerja Pelatihan ini berdasarkan pada Pelatihan Berbasis Kompetensi sebagai pendekatan untuk mendapatkan ketrampilan yang sesuai di tempat kerja. Pelatihan kerja berbasis kompetensi berfokus pada ketrampilan seseorang yang harus dimiliki di tempat kerja. Fokusnya adalah pada pencapaian ketrampilan dan bukan berapa lama waktu yang dibutuhkan untuk mengikuti pelatihan.Pada Pelatihan ini disusun berdasarkan pada Standar Kompetensi Nasional . Standar Kompetensi adalah pernyataan Pengetahuan, Ketrampilan dan Sikap yang diakui secara nasional. Laporan pelatihan ini terdiri dari satu unit kompetensi yaitu Rangkaian Kontrol LIFT .Buku Kerja pelatihan ini adalah sumber untuk pelatih dan peserta pelatihan. Informasi yang dibutuhkan peserta pelatihan pada waktu melaksanakan praktek kerja Memasang Rangkaian kontrol dan rangkaian utama.Buku Kerja Pelatihan ini digunakan sebagai Kriteria atau langkah-langkah pelaksanaan pelatihan terhadap standar kompetensi
1.2 Latar Belakang Masalah
Dari masa ke masa seiring dengan perkembangan ilmu pengetahuan dan kemajuan teknologi, manusia menghendaki kehidupan yang lebih nyaman. Oleh sebab itu keberadaan ilmu strategi pengajaran dalam system pendidikan memerlukan upaya serius untuk tercapainya perkembangan yang optimal dari setiap mahasiswa teknik elektro. Dengan demikian kita dapat bersaing di kancah industri yang semakin pesat perkembangannya. Dewasa ini ilmu strategi pengajaran sudah berkembang seiring dengan berkembangnya teknologi dan industri-industri yang ada. Maka sebagai seorang mahasiswa teknik elektro kita harus dapat memenuhi permintaan yang telah ditentukan oleh masing-masing industri tersebut. Maka dari itu latihan merancang, tugas dan evaluasi merupakan salah satu bahasan dan ilmu strategi pelajaran.Keberhasilan pengajar atau dosen merancang materi pengajaran termasuk
dunia industri namun yang di titik beratkan bukan hanya menguasai tetapi memahami keseluruhan dari Rangkaian Kontrol LIFT
1.3 Tujuan Penulisan
Penulisan laporan ini merupakan sebagai pernyataan bahwa mahasiswa Politeknik Negri Jakarta telah melaksanakan mata kuliah Rangkaian Kontrol LIFT.sesuai silabus semester empat.Penulisan laporan ini juga merupakan indikasi mahasiswa di dalam melaksanakan tugas yang diberikan.Dengan demikian tugas yang sudah menjadi kewajiban bagi mahasiswa sudah terbukti dengan adanya laporan ini dan oleh karena itu tidak ada lagi kata yang menyatakan bahwa mahasiswa belum menyelesaikan tugas yang terdapat pada silabus pendidikan.
1.4 Pembatasan Penulisan
Dalam setiap langkah sudah tentu ada batasannya begitu juga di setiap penulisan terdapat batasan-batasan. Batasan ini merupakan keterbatasan suatu laporan di dalam penulisannya. Untuk laporan ini di batasi dengan teori yang hanya menerangkan spesifikasi keseluruhan dari Rangkaian Kontrol LIFT. Walaupun ada pembahasan itu,merupakan sedikit dari kutipan.
1.5 Mata Kuliah Penunjang
Sebelum menyelesaikan laporan ini diperlukan teori-teori yang dapat mendukung selesainya laporan ini.Untuk menunjang selesainya laporan ini ,ada mata kuliah yang saling terkait satu sama lain.Dan hal ini sangat bersinergi untuk melengkapi pembahasan yang ada.
1.6 Metodelogi Penulisan
Sistem penulisan laporan ini berdasarkan ilmu kepustakaan, yaitu dari beberapa sumber baik buku, maupun internet dalam membantu penulisan isi laporan ini.Disamping itu penulisan laporan ini tidak terlepas dari materi Rangkaian Kontrol LIFT sebagaimana panduan yang telah diberikan oleh dosen pembimbing
BAB II
2.1 Sejarah perkembangan lift atau elevator
Elevator atau yang lebih akrab dikenal oleh masyarakat luas dengan nama lift. Lift adalah salah satu alat Bantu dalam kehidupan manusia yang berfungsi untuk mempermudah aktifitas manusia yang rutinitasnya lebih sering berada didalam gedung-gedung bertingkat. Elevator merupakan alat transportasi yang pengendaliannya tidak dilakukan oleh manusia secara langsung, sehingga semua pengguna elevator sepenuhnya tergantung pada kehandalan teknologi dari alat transportasi vertikal ini.
Keberadaan dari elevator ini merupakan sebagai pengganti fungsi dari pada tangga dalam mencapai tiap-tiap lantai berikutnya pada suatu gedung bertingkat, dengan demikian keberadaan elevator tidak dikesampingkan ini dikarenakan dapat mengefisienkan energi dan waktu sipengguna elevator tersebut. Sistem keberadaan elevator dan segala kemajuan dan kehandalannya tidak serta merta mengalami perkembangan-perkembangan secara bertahap, sejak keberadaannya pertama kali dibangun.
Perkembangan elevator sangat lambat pada awal tahun 1970-an, namun sejak diperkenalkannya transistor dan alat pendukung elektronik lainnya pada sistem kontrol elevator pada saat itulah perkembangan kontroller elevator begitu pesat.
Elevator dapat dibagi menjadi beberapa bagian, yaitu :
1. Elevator penumpang
2. Elevator barang atau dumb waiter 3. Elevator service
4. Elevator hidraulik
2.2 Peralatan-peralatan Dalam Control lift (Bentuk, Fungsi dan
Simbolnya)
1. Button Switch
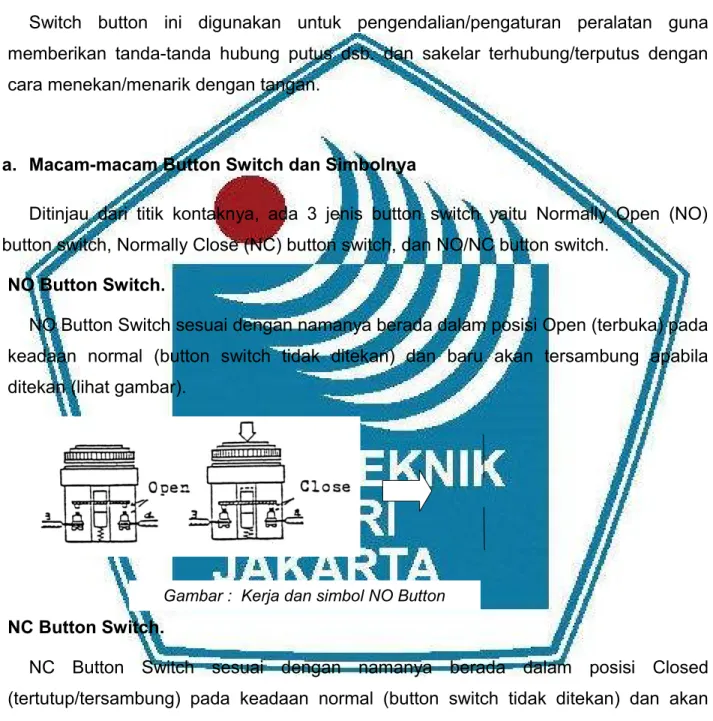
Switch button ini digunakan untuk pengendalian/pengaturan peralatan guna memberikan tanda-tanda hubung putus dsb. dan sakelar terhubung/terputus dengan cara menekan/menarik dengan tangan.
a. Macam-macam Button Switch dan Simbolnya
Ditinjau dari titik kontaknya, ada 3 jenis button switch yaitu Normally Open (NO) button switch, Normally Close (NC) button switch, dan NO/NC button switch.
NO Button Switch.
NO Button Switch sesuai dengan namanya berada dalam posisi Open (terbuka) pada keadaan normal (button switch tidak ditekan) dan baru akan tersambung apabila ditekan (lihat gambar).
NC Button Switch.
NC Button Switch sesuai dengan namanya berada dalam posisi Closed (tertutup/tersambung) pada keadaan normal (button switch tidak ditekan) dan akan terputus/terbuka apabila ditekan (lihat gambar).
Gambar : Kerja dan simbol NO Button Switch
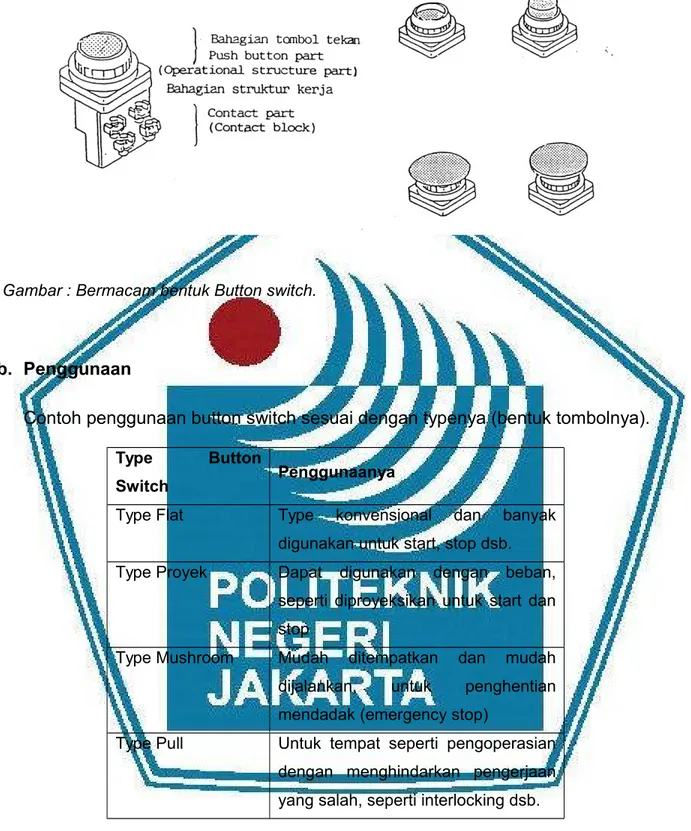
Gambar : Bermacam bentuk Button switch.
b. Penggunaan
Contoh penggunaan button switch sesuai dengan typenya (bentuk tombolnya).
Type Button
Switch Penggunaanya
Type Flat Type konvensional dan banyak digunakan untuk start, stop dsb. Type Proyek Dapat digunakan dengan beban,
seperti diproyeksikan untuk start dan stop
Type Mushroom Mudah ditempatkan dan mudah dijalankan, untuk penghentian mendadak (emergency stop)
Type Pull Untuk tempat seperti pengoperasian dengan menghindarkan pengerjaan yang salah, seperti interlocking dsb.
Warna Fungsi Pemakaian
Merah Stop
Satu atau sebagian motor stop, tanpa menggunakan chuk magnet, untuk penghenti, penghenti putaran
Emergenci Stop Semua stop
Kuning
Start kembali urutan normal
Kembali pada putaran start pada keadaan putaran belum sempurna Start kembali dari
henti mendadak
Dapat merusak fungsi lain
Hitam / Hijau Star
Star putaran pada urutan tertentu, start sebuah atau sebagian dengan peralatan tambahan pada rangkaian, unit start, menambah chuk magnetik
Putih Keadaan lain selain warna diatas
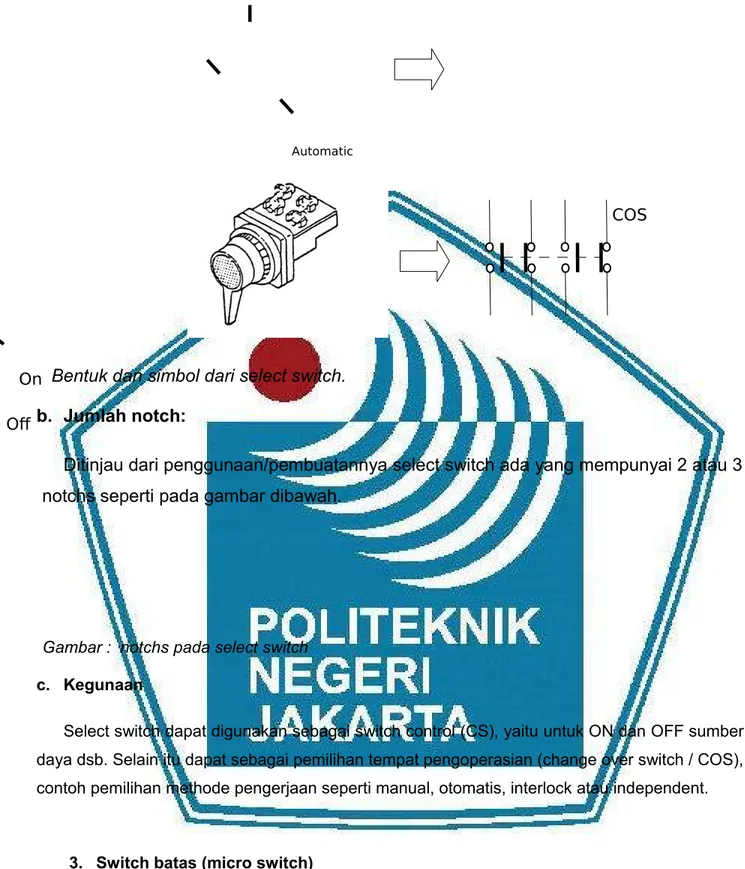
2. Select Switch
Switching kontak ini dilakukan melalui perputaran pada sudut batas tertentu dari bagian push button (bagian yang bergerak).
a. Bentuk nyata dan simbolnya:
Of On
Indenpendent
Interlock
Automatic
Bentuk dan simbol dari select switch. b. Jumlah notch:
Ditinjau dari penggunaan/pembuatannya select switch ada yang mempunyai 2 atau 3 notchs seperti pada gambar dibawah.
Gambar : notchs pada select switch
c. Kegunaan
Select switch dapat digunakan sebagai switch control (CS), yaitu untuk ON dan OFF sumber daya dsb. Selain itu dapat sebagai pemilihan tempat pengoperasian (change over switch / COS), contoh pemilihan methode pengerjaan seperti manual, otomatis, interlock atau independent.
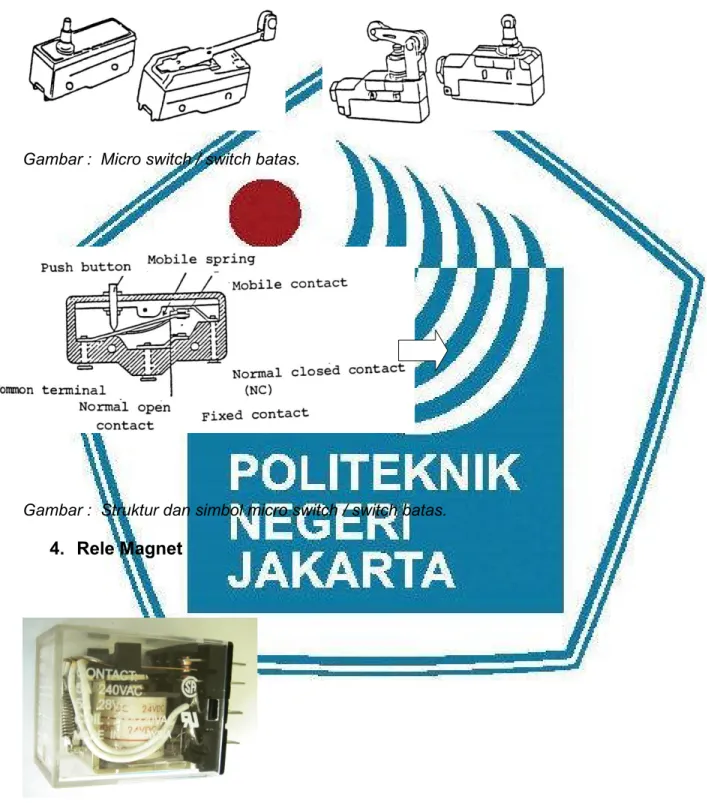
3. Switch batas (micro switch)
Switch batas dan switch micro banyak digunakan sebagai pendeteksi posisi dari objek yang COS
Bagian kontaknya terdiri dari kontak c dan sebelum bekerja keadaanya ON antara C-NC dan akan OFF sesudah bekerja. Sedangkan antara C-NO, akan OFF sebelum bekerja dan ON sesudah bekerja.
Gambar : Micro switch / switch batas.
Gambar : Struktur dan simbol micro switch / switch batas. 4. Rele Magnet
Rele magnet merupakan switch yang bekerja secara otomatis karena efek medan magnet. Ada dua type rele magnet yaitu rele type hinge, dimana titik kontaknya type C (change over contact) dan rele type plunger, dimana titik kontaknya type A / B (NO / NC).
2.3 Macam - macam Titik Kontak
Titik kontak merupakan sejenis sakelar untuk membuka menutup atau menghubungkan – memutuskan sebagian atau seluruh rangkaian listrik seperti terlihat pada gambar di bawah
Titk kontak pada sebuah switch terdiri dari bagian yang bergerak dan bagianb yang diam seperti pada gambar B
Gambar: Titik kontak a.
Adapun kerja dari titik kontak a dapat dilihat pada gambar berikut.
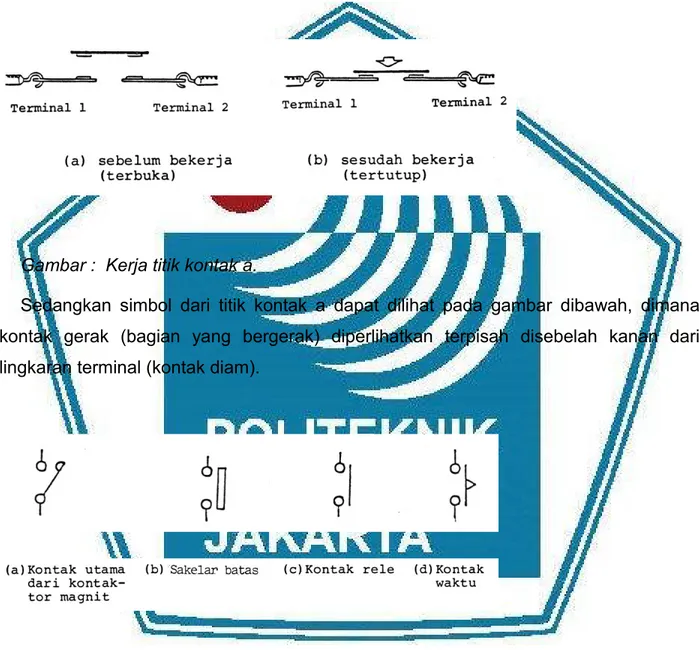
Gambar : Kerja titik kontak a.
Sedangkan simbol dari titik kontak a dapat dilihat pada gambar dibawah, dimana kontak gerak (bagian yang bergerak) diperlihatkan terpisah disebelah kanan dari lingkaran terminal (kontak diam).
Gambar : Simbol dari titik kontak a (NO).
Dikarenakan sifat titik kontak a yang pada kondisi normal berada dalam kondisi terbuka, titik kontak a dinamakan juga titik kontak NO (Normally Opened).
Titik Kontak b
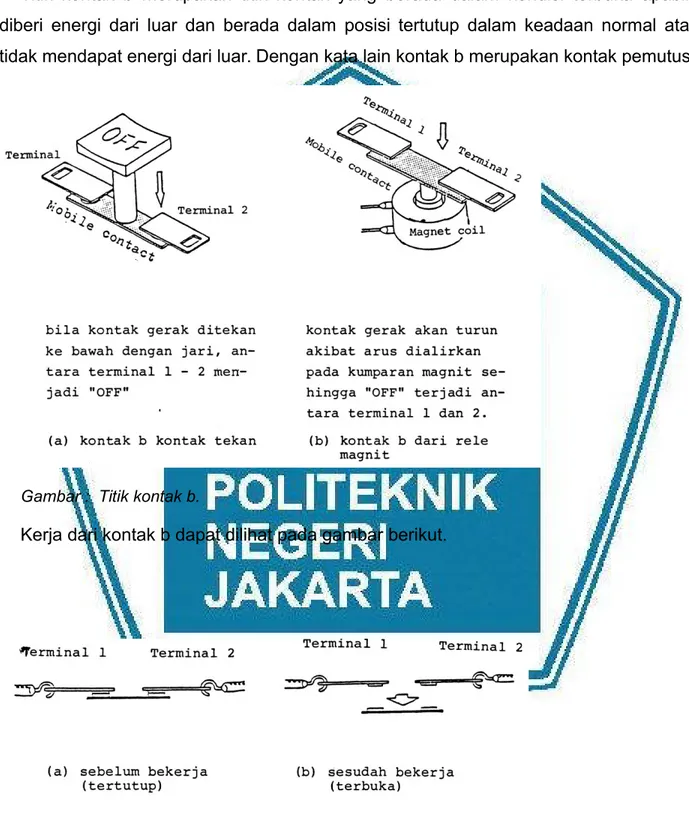
Titik kontak b merupakan titik kontak yang berada dalam kondisi terbuka apabila diberi energi dari luar dan berada dalam posisi tertutup dalam keadaan normal atau tidak mendapat energi dari luar. Dengan kata lain kontak b merupakan kontak pemutus.
Gambar : Titik kontak b.
Gambar : Kerja titik kontak b.
Adapun simbol untuk kontak b diperlihatkan pada gambar dibawah ini, dimana bagian yang bergerak (kontak gerak) diperlihatkan bersentuhan dengan bagian kiri dari titik terminal (kontak diam).
Gambar : Simbol titik kontak b (NC).
Dikarenakan sifat titik kontak b yang pada kondisi normal berada dalam kondisi tertutup, titik kontak b dinamakan juga titik kontak NC (Normally Closed).
Titik Kontak c
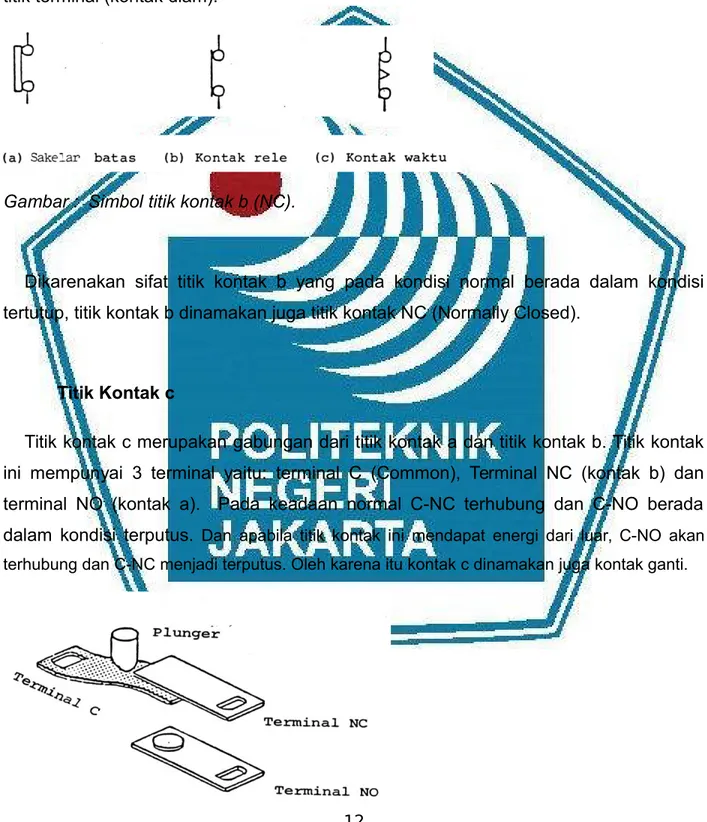
Titik kontak c merupakan gabungan dari titik kontak a dan titik kontak b. Titik kontak ini mempunyai 3 terminal yaitu: terminal C (Common), Terminal NC (kontak b) dan terminal NO (kontak a). Pada keadaan normal C-NC terhubung dan C-NO berada dalam kondisi terputus. Dan apabila titik kontak ini mendapat energi dari luar, C-NO akan terhubung dan C-NC menjadi terputus. Oleh karena itu kontak c dinamakan juga kontak ganti.
Gambar : Titik kontak c.
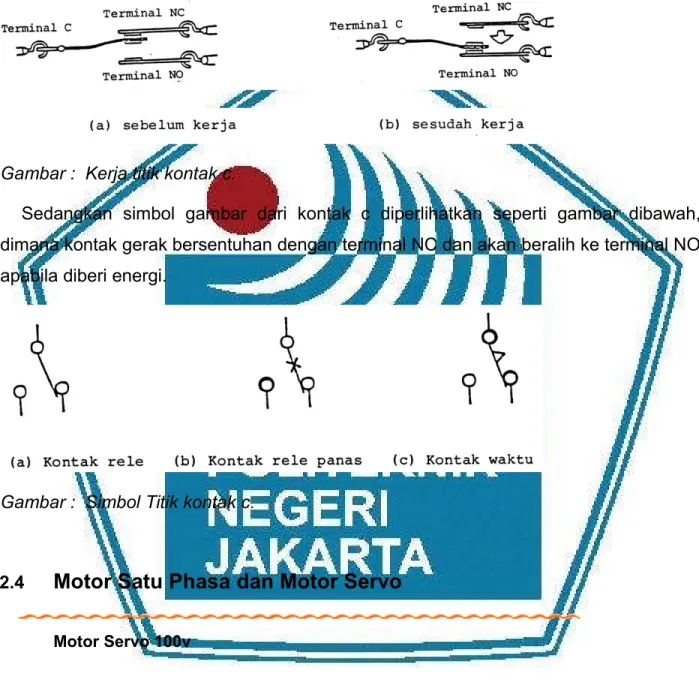
Kerja dari kontak c dapat dilihat pada gambar berikut.
Gambar : Kerja titik kontak c.
Sedangkan simbol gambar dari kontak c diperlihatkan seperti gambar dibawah, dimana kontak gerak bersentuhan dengan terminal NC dan akan beralih ke terminal NO apabila diberi energi.
Gambar : Simbol Titik kontak c.
2.4
Motor Satu Phasa dan Motor Servo
Motor servo adalah sebuah motor DC yang dilengkapi rangkaian kendali dengan sistem closed feedback yang terintegrasi dalam motor tersebut. Pada motor servo posisi putaran sumbu (axis) dari motor akan diinformasikan kembali ke rangkaian kontrol yang ada di dalam motor servo. Contoh Motor Servo Motor servo disusun dari sebuah motor DC, gearbox, variabel resistor (VR) atau potensiometer dan rangkaian kontrol. Potensiometer berfungsi untuk menentukan batas maksimum putaran sumbu (axis) motor servo. Sedangkan sudut dari sumbu motor servo diatur berdasarkan lebar pulsa yang pada pin kontrol motor servo.
Konstruksi Motor Servo Motor servo adalah motor yang mampu bekerja dua arah (CW dan CCW) dimana arah dan sudut pergerakan rotornya dapat dikendalikan dengan memberikan variasi lebar pulsa (duty cycle) sinyal PWM pada bagian pin kontrolnya. Jenis Motor Servo Motor Servo Standar 180° Motor servo jenis ini hanya mampu bergerak dua arah (CW dan CCW) dengan defleksi masing-masing sudut mencapai 90° sehingga total defleksi sudut dari kanan – tengah – kiri adalah 180°. Motor Servo Continuous Motor servo jenis ini mampu bergerak dua arah (CW dan CCW) tanpa batasan defleksi sudut putar (dapat berputar secara kontinyu). Pulsa
Kontrol Motor Servo Operasional motor servo dikendalikan oleh sebuah pulsa selebar ± 20 ms, dimana lebar pulsa antara 0.5 ms dan 2 ms menyatakan akhir dari range sudut maksimum. Apabila motor servo diberikan pulsa dengan besar 1.5 ms mencapai gerakan 90°, maka bila kita berikan pulsa kurang dari 1.5 ms maka posisi mendekati 0° dan bila kita berikan pulsa lebih dari 1.5 ms maka posisi mendekati 180°. Pulsa Kendali Motor Servo Motor Servo akan bekerja secara baik jika pada bagian pin kontrolnya diberikan sinyal PWM dengan frekuensi 50 Hz. Dimana pada saat sinyal dengan frekuensi 50 Hz tersebut dicapai pada kondisi Ton duty cycle 1.5 ms, maka rotor dari motor akan berhenti tepat di tengah-tengah (sudut 0°/ netral). Pada saat Ton duty cycle dari sinyal yang diberikan kurang dari 1.5 ms, maka rotor akan berputar ke berlawanan arah jarum jam (Counter Clock wise, CCW) dengan membentuk sudut yang besarnya linier terhadap besarnya Ton duty cycle, dan akan bertahan diposisi tersebut, dan sebaliknya
Jenis - Jenis Motor Servo
Motor Servo Standar 180° Motor servo jenis ini hanya mampu bergerak dua arah (CW dan CCW) dengan defleksi masing-masing sudut mencapai 90° sehingga total defleksi sudut dari kanan – tengah – kiri adalah 180°.
Motor Servo Continuous Motor servo jenis ini mampu bergerak dua arah (CW dan CCW) tanpa batasan defleksi sudut putar (dapat berputar secara kontinyu). Pulsa Kontrol Motor Servo Operasional motor servo dikendalikan oleh sebuah
pulsa selebar ± 20 ms, dimana lebar pulsa antara 0.5 ms dan 2 ms menyatakan akhir dari range sudut maksimum. Apabila motor servo diberikan pulsa dengan besar 1.5 ms mencapai gerakan 90°, maka bila kita berikan pulsa kurang dari 1.5 ms maka posisi mendekati 0° dan bila kita berikan pulsa lebih dari 1.5 ms maka posisi mendekati 180°.
Pulsa Kendali Motor Servo Motor Servo akan bekerja secara baik jika pada bagian pin kontrolnya diberikan sinyal PWM dengan frekuensi 50 Hz. Dimana pada saat sinyal dengan frekuensi 50 Hz tersebut dicapai pada kondisi Ton duty cycle 1.5 ms, maka rotor dari motor akan berhenti tepat di tengah-tengah (sudut 0°/ netral).
Pada saat Ton duty cycle dari sinyal yang diberikan kurang dari 1.5 ms, maka rotor akan berputar ke berlawanan arah jarum jam (Counter Clock wise, CCW) dengan membentuk sudut yang besarnya linier terhadap besarnya Ton duty cycle, dan akan bertahan diposisi tersebut. Dan sebaliknya, jika Ton duty cycle dari sinyal yang diberikan lebih dari 1.5 ms, maka rotor akan berputar searah jarum jam (Clock Wise, CW) dengan membentuk sudut yang linier pula terhadap besarnya Ton duty cycle, dan bertahan diposisi
Belitan Motor 1 Phasa
Kum. pembantu Kum. utama x
S
y zR
50 Ω 60 Ω 10 ΩC
S
R
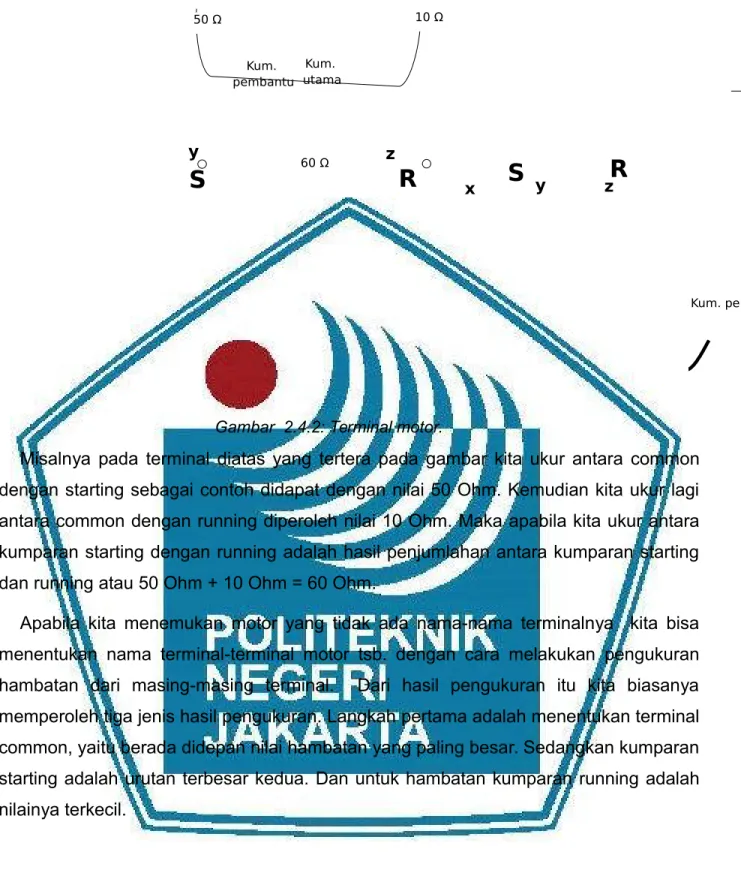
Kum. pembantu Kum. utama x y zGambar 2.4.2: Terminal motor.
Misalnya pada terminal diatas yang tertera pada gambar kita ukur antara common dengan starting sebagai contoh didapat dengan nilai 50 Ohm. Kemudian kita ukur lagi antara common dengan running diperoleh nilai 10 Ohm. Maka apabila kita ukur antara kumparan starting dengan running adalah hasil penjumlahan antara kumparan starting dan running atau 50 Ohm + 10 Ohm = 60 Ohm.
Apabila kita menemukan motor yang tidak ada nama-nama terminalnya kita bisa menentukan nama terminal-terminal motor tsb. dengan cara melakukan pengukuran hambatan dari masing-masing terminal. Dari hasil pengukuran itu kita biasanya memperoleh tiga jenis hasil pengukuran. Langkah pertama adalah menentukan terminal common, yaitu berada didepan nilai hambatan yang paling besar. Sedangkan kumparan starting adalah urutan terbesar kedua. Dan untuk hambatan kumparan running adalah nilainya terkecil.
T
C
o
ilTitik kontak
Delay Titik kontak Instant NO
NO NC
NC
2.5
Relay Batas Waktu (Timer)
Gambar 39 Timer
Timer merupakan sakelar yang bekerja berdasar elektromagnetis dan memerlukan waktu dalam menggerakkan titik kontaknya. Pada hakekatnya timer sama dengan magnetic kontaktor, hanya pada timer terdapat titik kontak delay yang bekerjanya memerlukan waktu sesuai dengan setting waktunya.
Prinsip kerja timer dapat dijelaskan sbb:
Gambar 40 Terminal-terminal pada timer.
Pada kondisi netral atau coil tidak bertegangan maka kondisi titik kontak NO pada posisi terbuka dan titik kontak NC pada posisi terhubung. Jika coil diberi tegangan listrik maka titik kontak instant langsung bergerak (titik kontak NO akan menutup dan NC akan membuka), sedang titik kontak delay akan bekerja/bergerak beberapa saat kemudian sesuai dengan setting waktunya (titik kontak NO akan menutup dan NC akan membuka).
2.6 LIFT DAN CARA KERJANYA
Lift adalah alat pengangkat yang ditujukan khusus untuk mengangkat/memindahkan barang atau orang secara vertical didalam sangkar yang begerak pada rel penuntun tetap.
Adapun cara kerja dari lift ini adalah dengan gerakan naik turun (hoist) dimana sangkar yang berisi barang atau orang dan beban engimbang digantungkan pada tali yag ditarik naik atau turun dengan menggunakan pully, dimana pully ini berputara sesuai dengan kebutuhan. Pully digerakkan oleh motor listrik dan gerakan pully dihentikan oleh rem, sehingga barang atau orang tidak akan naik atau turun setelah posisi angkat yang diingin tercapai.
Pemakaian Lift dapat dibagi atas beberapa klasifikasi, yaitu :
1. Pemakaian umum atau perniagaan (General Purpose or Comercial) yaitu tipe lift yang digunakan pada pemakaian yang bersifat umum. Contohnya : Pada kantor kantor atau perusahaan.
2. Pemakaian pada tempat tinggal (Residential) Yaitu tipe lift yang digunakan pada rumah tempat tinggal Contohnya : pada rumah tempat tinggal
3. Pemakaian pada supermarket (Store) Yaitu tipe lift yang dipergunakan pada swalayan atau pusat perbelanjaan.
4. Pemakaian pada lembaga-lembaga (Institutional) Yaitu tipe lift yang dipakai pada bangunan untuk suatu bentuk kelembagaan Contohnya: Pada lembaga Pendidikan
Pemasangan Lift
Ditinjau dari segi pemasangan, ada dua cara pemasangan lift, yaitu:
1. Pemasangan dengan satu sangkar (Single Car) Didalam suatu gedung hanya terdapat satu sangkar saja atau dengan kata lain gedung tersebut hanya dilayani oleh satu unit lift saja. Pemasangan ini biasanya terdapat pada gedung yag tidak beitu tinggi dan tidak luas serta lalau lintas
2. Pemasangan dengan lebih dari satu sangkar Pada bangunan tersebut terdapat lebih dari satu sangkar. Jika ada panggilan akan terjadi respond an interaksi antara beberapa sangkar tersebut. Sangkar yang paling dekat dan tidak sedang bekerjalah yang akan melayani panggilan tersebut. System ini dipakai pada gedung bertingkat banyak serta luas dan mempunyai lalu lintas pemakaian yang ramai.
Ruang Peletakan Mesin
Bila ditinjau dari ruang tempat peletakan mesin utama dari lift, terdapat dua tipe system peletakannya yaitu :
1. Penthous Machine Room Type Mesin lift ditempatkan pada bagian atas sangkar lift.
2. Basement Machine Room Type Mesin lift ditempatkan pada bagian bawah sangkar lift.
Sistem Penggerak Lift Bila ditinjau dari system penggerak lift, terdapat dua system yang digunakan pada gedung gedung:
1. Penggerak Lift System Warp 2. Penggerak Lift system Hidrolik
Penggerak Lift Sistem Warp
Pada system ini penggerak utama dari sangkar lift tersebut adalah motor listrik, dari motor tesebut akan dikopelkan ke poros mesin lift (driving Machine), yaitu suatu alat yang menggerakkan puli penggerak dan selanjutnya pully penggerak akan menarik tali yang diikat pada sangkar lift dan beban peimbang. Dengan demikian sangkar lift dan
beban pengimbang akan bergerak naik atau turun sesuai dengan putaran pully penggerak.
System pemasangan tali pada istem Wrap dapat dibedakan berdasarkan peletakan ruang mesin. Penthouse Mechine Room Pemasangan tali pada system warp pada Penthouse Mechine Room type dapat dilihat pada gambar 1.1.
Single Wrap Roping
Tali dipasang satu kali jalan, tanpa lilitan diletakkan diatas puli dan melalui katrol, kemudian tali diikatkan diatas sangkar lift dan beban pengimbang (gambar a )
Double wrap Roping
Ada dua cara pemasangan tali pada jenis Doble Wrap Roping ii yaitu tali dipasang satu kali lilit pada pully dan katrol, kemudian tali diikatkan diatas. sangkar lift dan beban pengimbang (gambar c) atau tali dipasang dua kali lilit tali diletakkan diatas puli diatas pully dan dililitkan ke katrol, selanjutnya ke atas sebagai titik tumpuan beban (Point Support).
(Lihat gambar 2.1.berikut ini )
Gambar 2.1. Pemasangan tali pada system Wrap Penthouse Machine Room Type
- Basement Machine Room
Pemasangan tali pada system wrap pada basement Machine Room Type dapat dilihat pada gambar 1.2
Sangkar lift dan beban pengimbang ditahan oleh dua buah katrol, selanjutnya pulli penggerak yang berada dibawah sangkar akan memutar kedua katrol yang menggerakkna sangkar lift dan beban pengimbang dalam arah yang saling berlawanan ( gambar a dan b ) (Lihat gambar 2.2. di bawah ini )
Gambar 2.2. Pemasangan Tali pada Sistem Wrap – Basement Machine Room Type.
Penggerak Lift Sistem Hidrolik
Lift system hidrolik memerlukan daya lebih kecil dibandingkan dengan system wrap. Nama hidrolik diberikan karena sangkar ini digerakkan oleh sebuah pompa yang dilayani oleh sebuah motor penggerak, sehingga dengan perubahan tekanan pada minyak (oil) akan menyebabkan aik atau turunnya sangkar lift.
System hidrolik dan cara kerjanya persis sama dengan dongkrak mobil hidrolik, minyak dari penampung dipompakan oleh plunyer untuk
mengangkat sangkar lift tersebut. Pompa dihentikan sampai titik terbawah, selanjutnya sangkar lift tersebut diturunkan dengan gaya gravitasi dan Bypass control yang juga mengotrol posisi dari sangkar lift tersebut sampai pada titik tertinggi. System control yang digunakan pada lift dengan system pengerak hidrolik biasanya sama dengan yang tedapat pada system penggerak wrap. Namun pada system penggerak hidrolik ini tidak diberikan beban pengimbang sehingga memerlukan motor dengan daya yang lebih besar dibandingkan dengan kebutuhan motor untuk keperluan yang sama pada system Wrap.
Berdasarkan pertimbangan dari uraian diatas maka pada perencanaan ini system pengerak lift yang akan dipergunakan adalah system Wrap dengan peletkana motor pada bagian atas sangkar (Penthouse Machine Room Type) dengan pemasangan tali satu kali jalan ( single Wrap Roping).
Methode pengoperasian Lift
Methode pengoperasian Lift adalah cara kerja lift dalam memberikan respon terhadap panggilan yang diberikan penumpang. Methode operasi lift secra umum dibedakan atas dua cara, yaitu:
1. Pengoperasian Manual
Pengoperasian manual merupakan system pengoperasian sangkar lift dengankecepatan renda dan dapat berhenti pada posisi sembarangn titik yang dikehendaki,
misalnya nutk kondisi perawatan atau untuk keperluan khusus, Dalam pengoperasiannya lift diatur oleh seorang operator. Dengan demikian semua panggilan harus dikirim ke meja operator, kemudan operator mengatur gerakan sangkar lift ke posisi level lantai yang diinginkan/dipesan penumpang methode ini jarang digunakan mengingat kurang praktisnya di dalam penggunaanya.
Pengoperasian lift secara otomatis memberikan respon secara langsung kepada penumpang yang memanggil sangkar lift. Berdasarkan prinsip kerjanya, methode ini dibedakan atas:
a. Metode Single Automatic Push Bottom
Pada metode operasi ini, pada setiap lantai hanya terdapat satu buah tombol untuk memanggil sangkar sedangkan didalam sangkar lift terdapat tujuan level lantai yang diinginkan. Selama lift bekerja, lift tidak melayani panggilan dari penumpang lain. Lift akan memberikan tanggapannya setelah lift selesai melaksankan tugasnya. Dengan kata lain lift baru dapat dipanggil apabila sangkar lift dalam keadaan tidak bekerja.
Dari penjelasan diatas prinisp kerja diatas, dapat dikatakan bahwa methode Single Automatic Push Bottom ini hanya dapat melayani panggilan satu persatu, artinya sangkar baru dapat dipanggil apabila lift dalam keadaan diam. Dengan demikian metode ini hanya efektif digunakan untuk gedung dengan dua atau tiga lantai. Dengan pemakaian lift yang tidak terlalu mendesak, misalnya untuk lift pengangkat barang.
b. Metode Selective – Collective
Pada metode ini terdapat dua buah tombol panggilan pada setiap lantai yaitu tombol panggilan naik dan tombol panggilan turun. Kecuali pada lantai terendah dan tertinggi yang masing masing hanya terdapat satu tombol panggilan.
Didalam sangkar lift terdapat tombol tujuan level lantai yang digunakan.
Metode operasi selective – collective ini lebih praktis dan efisien dalam menangani panggilan dibandingkan dengan Single Automatic Push Bottom.
Pada methode ini, secara otomatis sangkar lift akan melanyai semua panggilan naik pada saat sangkar llift naik dan melaani semua panggilan turun pada lantai yang dilaluinya.
Dengan demikian methode ini lebih efisien dalam menanggapi panggilan dibanding dengan metode Single Automatic Push Bottom karena sangkar lift dapat dipanggil walaupun lift dalam keadaan sedang bekerja.
c. Metoded Duplex-Collective
Pada prinsipnya metode duplex –collective ini hampir sama dengan metode selective-Collective merupakan operasi gabungan dari dua atau lebih lift yang bekerja secara Selective-Collective.
Pada metode ini, pada tiap lantai terdapat tombol bersama untuk memanggil sangkar lift. Apabila tombol panggilan ditekan maka sangkar dengan posisi paling dekat dan dengan arah yang sesuai dengan panggilan, akan melayani panggilan tersebut. Hal ini merupakan keistimewaan metode ini dibanding dengan metode Selective-Collective. Tombol tujuan terdapat pada setiap sangkar yang berfungsi untuk mengoperasikan sangkarnya masing-masing.
Sebagian besar peralatan lift type Phenthouse Mechine Rooms ditempatkan dibagian atas sangkar lift. (dapat lihat gambar 2.4. di bawah ini)
Komponen-komponen utama peralatan lift type Phenthouse Mechine Room yang ditempatkan dibagian atas sangkar lift adalah :
1. Electro motor 2. Mechine Lift 3. Rem Lift
4. Lemari Panel Relay 5. Governor
1. Electro Motor
Penggerak utama lift adalah sebuah electromotor yang digerakkan oleh listrik PLN atau generator listrik yang dilengkapi dengan pengatur medan (Field Control) yang dikontrol secara numeric (Numerical Control). Electro Motor dikopel ke rangkai Gear Box yang berfungsi untuk mereduksi putaran electromotor dengan mesin lift (Elevator Driving Mechine), Pulli dan rem Listrik.
2. Mesin Lift
Design lift disini digunakan mesin pengangkat jenis pulli dan roda pulli penggerak. Pada design dengan drum, tali yang menahan sangkar diikatkan pada drum dan dililitkan pada permukaannya sedangkan pada desingn pada roda pully penggerak, penggerak tali melewati roda pulli yang digerakkan oleh gaya gesek. Dalam perencanaan ini dipilih mesin pengangkat dengan pulli penggerak karena memiliki beberapa kelebihan diataranya:
1) Dapat digunakan untuk mengangkat pada segala macam ketinggian 2) Ukurannya lebih kompak
3) Lebih efektif karena gaya teraksi pada roda pulli penggerak akan hilang bila sangkar yang sedang turun terbentuk hambatan. Dalam hal ini, kelonggaran pada bagian tali yang keluar dari pulli akan menyebabkan tergelincirnya oleh pulli pada tali sehingga tali akan mengencang kembali
4) Penggunaan mesin pengangkat jenis roda pulli ini telah mengurangi kecelakaan secara drastris akibat putusnya tali.
Mesin Lift penggerak roda pulli untuk elevator penumpang ditunjukkan pada gambar 2.5. dibawah ini :
Gambar 2.5 Mesin Lift dan Electro Motor
3. Rem Lift
Prinsip Kerja Rem Lift sama dengan kontak NC dari suatu relay atau kontaktor, dimana rem dalam keadaan menjepit poros mesin lift pada saat sangkar lift tidak bekerja, sebaliknya rem akan melepaskan poros lift apabila coil rem listrik tersebut terenergi. Dengan demikian apabila sumber arus dari panel utama putus pada saat lift bergerak, penumpang akan aman dari bahaya benturan yang timbul apabila rem tidak menjepit poros mesin tersebut. Di bawah ini gambar 2.6. akan diperlihatkan konstruksi rem listrik untuk lift.
Gambar 2.6. Rem Lift 4. Lemari Panel
Lemari panel merupakan tempat sebagian besar peralatan listrik (komponen komponen control) disambungkan seperti relay, transformator dan penyearah. Tiap unit lift memiliki masing masing satu buah lemari panel.
5. Governor
Governor adalah merupakan pengaman kecepatan lebih (Over Speed). Prinsip kerjanya adalah berdasarkan gaya sentrifugal. Tali (Rope) governor dihubungkan kebagian atas dan bawah sangkar melalui dua buah pulli governor. Pulli governor ditempatkan diruang machine atas dan yang lainnya ditempatkan pada bagian bawah (basement) instalasi lift, sehingga pulli governor akan bergerak apabila sangkar lift bergerak.
BAB III
KEGIATAN DI WORKSHOP
Menentukan input dan output pada 1 set trainer LIFT
JOB 1
NO INPUT OUTPUT
1 Button switch Motor 100v
2 Relay 24VDC Limit Switch
3 Sumber DC 24V Timer
4 Sumber AC 100V Buzzer
KET :
- Relay :
roduct Range: OMRON - MY Series Coil Voltage: 24VDC
Contact Current: 5A
Contact Voltage VAC: 250V Contact Voltage VDC: 30V Contact Configuration: 4PDT Coil Resistance: 650ohm
Relay Mounting: Quick Connect
- Timer adalah Sebagai pengatur waktu berhentinya lift disetiap lantai
KESIMPULAN:
Komponen input adalah peralatan yang memberikan perintah langsung atau data ke peralatan proses
Komponen proses adalah peralatan yang memproses data dari input dan akan mengeluarkan data tersebut ke komponen output
Rangkaian Naik – Turun bebas pada LIFT
JOB 2
A. Tujuan Praktek
Mahasiswa dapat menerapkan hasil pembelajaran tentang sistem kontrol mekanik pada rangkaian lift naik turun secara bebas.
Mahasiswa dapat melakukan pengawatan rangkaian lift naik turun secara bebas di tempat kerja.
Mahasiswa dapat menganalisa permasalahan yang mungkin terjadi pada rangkaian .
B . Keselamatan Kerja
Memperhatikan dan mematuhi instruksi dari instruktur.
Menjaga keselamatan diri sendiri, orang lain, dan peralatan itu sendiri. Berpakain sesuai yang telah ditentukan.
Bertindak dengan cepat dan benar ketika terjadi suatu kecelakaan. C. Langkah Kerja
Pastikan alat berfungsi dengan baik dan benar
Rangkailah rangkaian lift naik turun bebas pada tempat kerja Berikan tegangan sesuai pada rangkaian
Check dan analisa kerja rangkaian tersebut apabila menemukan kesalahan pada rangkaian
Perbaikilah rangkaian jika cara kerja tidak benar
:
Pada saat posisi lift di lantai 1 dan call 1 ditekan maka lift akan berada di lantai 1 Pada saat posisi lift di lantai 1 dan call 2 ditekan maka lift akan naik ke lantai 2 Pada saat posisi lift di lantai 2 dan call 3 ditekan maka lift akan naik ke lantai 3 Pada saat posisi lift di lantai 3 dan call 2 ditekan maka lift akan turun ke lantai 2 Pada saat posisi lift di lantai 2 dan call 1 ditekan maka lift akan turun ke lantai 1 Pada saat posisi lift di lantai 1 dan call 3 ditekan maka lift akan naik ke lantai 3 Pada saat posisi lift di lantai 3 dan call 1 ditekan maka lift akan turun ke lantai 1
F. MASALAH
Push button pada call 2 tidak berfungsi dengan baik karena harus di tekan ke dalam
Pertama melaukan pengecekan dengan AVO lalu sudah diketahui maslahanya push button , jadi ganti/pindah push button untuk push button call 2
Ran
gkaian Kontrol Lift Secara Acak Jilid 1
JOB 3
A. Tujuan Praktek Mahasiswa dapat menerapkan hasil pembelajaran tentang sistem kontrol mekanik pada Rangkaian Kontrol Lift Secara Acak.
Mahasiswa dapat melakukan pengawatan Rangkaian Kontrol Lift Secara Acak.di tempat kerja.
Mahasiswa dapat menganalisa permasalahan yang mungkin terjadi pada rangkaian .
Memperhatikan dan mematuhi instruksi dari instruktur.
Menjaga keselamatan diri sendiri, orang lain, dan peralatan itu sendiri. Berpakain sesuai yang telah ditentukan.
Bertindak dengan cepat dan benar ketika terjadi suatu kecelakaan. C. Langkah Kerja
Pastikan alat berfungsi dengan baik dan benar
Rangkailah rangkaian lift naik turun bebas pada tempat kerja Berikan tegangan sesuai pada rangkaian
Check dan analisa kerja rangkaian tersebut apabila menemukan kesalahan pada rangkaian
Perbaikilah rangkaian jika cara kerja tidak benar
E. DESKRIPSI KERJA :
Posisi lift pada lantai 1
1 Pada saat Call 2 ditekan maka lift akan naik ke lantai 2 2 Pada saat Call 3 ditekan maka lift akan naik ke lantai 3
3 Pada saat Call 2 dan Call 3 ditekan maka lift akan naik ke lantai 2 kemudian naik ke lantai 3
5 Pada saat Call 2 ditekan kemudian Call 1 ditekan maka lift akan naik ke lantai 2 lalu akan turun ke lantai 1
6 Pada saat Call 2 dan Call 3 ditekan kemudia Call 1 ditekan maka lift akan naik terlebih dahulu ke lantai 2 lalu ke lantai 3 kemudian akan turun ke lantai 1
Posisi lift pada lantai 2
1. Pada saat Call 3 ditekan maka lift akan naik ke lantai 3 2. Pada saat Call 1 ditekan maka lift akan turun ke lantai 1
3. Pada saat Call 3 ditekan kemudian Call 2 ditekan maka lift akan naik ke lantai 3 kemudian turun ke lantai 2
4. Pada saat Call 1 ditekan kemudian Call 2 ditekan maka lift akan turun ke lantai 1 kemudian akan naik ke lantai 2
5. Pada saat Call 3 ditekan kemudian Call 2 dan Call 1 ditekan maka lift akan naik ke lantai 3 lalu akan turun ke lantai 2 kemudian turun ke lantai 1 6. Pada saat Call 1 ditekan kemudian Call 2 dan Call 3 ditekan maka lift akan turun ke lantai 1 lalu akan naik ke lantai 2 kemudian naik ke lantai 3 Posisi lift pada lantai 3
1 Pada saat Call 2 ditekan maka lift akan turun ke lantai 2 2 Pada saat Call 1 ditekan maka lift akan turun ke lantai 1
3 Pada saat Call 2 ditekan kemudian Call 3 ditekan maka lift akan turun ke lantai 2 kemudian akan naik ke lantai 3
4 Pada saat Call 1 ditekan kemudian Call 3 ditekan maka lift akan turun ke lantai 1 kemudian akan naik ke lantai 3
5 Pada saat Call 2 dan Call 1 ditekan maka lift akan turun ke lantai 2 kemudian akan turun ke lantai 1
6 Pada saat Call 2 ditekan kemudian Call 1 dan Call 3 ditekan maka lift akan turun terlebih dahulu ke lantai 2 lalu akan turun ke lantai 1 kemudian akan naik ke lantai 3
F. MASALAH :
Pada saat praktek terdapat kesalahan pembacaan gambar dengan hasil yang di praktekan. Akibat dari salah pembacaan gambar rangkaian pada saat call 3 di tekan maka tidak bisa UP dan merusak dari fungsi call yang lain
G. SOLUSI MASALAH :
Memeriksa kembali gambar rangkaian dan meneliti setiap rangkaian pada panel terdapat pada titik kontak NC k4 yang seharusnya NC K3
Rangk
aian Kontrol Lift Secara acak menggunakan timer
JOB 4
A. Tujuan Praktek Mahasiswa dapat menerapkan hasil pembelajaran tentang sistem kontrol mekanik pada Rangkaian Kontrol Lift Secara Acak.
Mahasiswa dapat melakukan pengawatan Rangkaian Kontrol Lift Secara Acak.di tempat kerja.
Mahasiswa dapat menganalisa permasalahan yang mungkin terjadi pada rangkaian .
B . Keselamatan Kerja
Memperhatikan dan mematuhi instruksi dari instruktur.
Menjaga keselamatan diri sendiri, orang lain, dan peralatan itu sendiri. Berpakain sesuai yang telah ditentukan.
Bertindak dengan cepat dan benar ketika terjadi suatu kecelakaan. C. Langkah Kerja
Pastikan alat berfungsi dengan baik dan benar
Rangkailah rangkaian lift naik turun bebas pada tempat kerja Berikan tegangan sesuai pada rangkaian
Check dan analisa kerja rangkaian tersebut apabila menemukan kesalahan pada rangkaian
Perbaikilah rangkaian jika cara kerja tidak benar
Posisi lift pada lantai 1
1. Pada saat Call 2 ditekan maka lift akan naik ke lantai 2 2. Pada saat Call 3 ditekan maka lift akan naik ke lantai 3
3. Pada saat Call 2 dan Call 3 ditekan maka lift akan naik ke lantai 2 dan berhenti sesuai dengan waktu yang ditentukan kemudian naik ke lantai 3 4. Pada saat Call 3 ditekan kemudian Call 1 di tekan maka lift akan naik
terlebih dahulu ke lantai 3 dan berhenti sesuai dengan waktu yang ditentukan lalu akan turun ke lantai 1.
5. Pada saat Call 2 ditekan kemudian Call 1 ditekan maka lift akan naik ke lantai 2 dan berhenti sesuai dengan waktu yang ditentukan lalu akan turun ke lantai 1
6. Pada saat Call 2 dan Call 3 ditekan kemudia Call 1 ditekan maka lift akan naik terlebih dahulu ke lantai 2 dan berhenti sesuai dengan waktu yang ditentukan lalu ke lantai 3 dan berhenti sesuai dengan waktu yang ditentukan kemudian akan turun ke lantai 1
Posisi lift pada lantai 2
1. Pada saat Call 3 ditekan maka lift akan naik ke lantai 3 2. Pada saat Call 1 ditekan maka lift akan turun ke lantai 1
3. Pada saat Call 3 ditekan kemudian Call 2 ditekan maka lift akan naik ke lantai 3 dan berhenti sesuai dengan waktu yang ditentukan kemudian turun ke lantai 2
4. Pada saat Call 1 ditekan kemudian Call 2 ditekan maka lift akan turun ke lantai 1 dan berhenti sesuai waktu yang ditentukan kemudian akan naik ke lantai 2
5. Pada saat Call 3 ditekan kemudian Call 2 dan Call 1 ditekan maka lift akan naik ke lantai 3 dan berhenti sesuai dengan waktu yang ditentukan lalu akan turun ke lantai 2 dan berhenti sesuai dengan waktu yang ditentukan kemudian turun ke lantai 1
6. Pada saat Call 1 ditekan kemudian Call 2 dan Call 3 ditekan maka lift akan turun ke lantai 1 dan berhenti sesuai dengan waktu yang ditentukan lalu akan naik ke lantai 2 dan berhenti sesuai waktu yang ditentukan kemudian naik ke lantai 3
Posisi lift pada lantai 3
1. Pada saat Call 2 ditekan maka lift akan turun ke lantai 2 2. Pada saat Call 1 ditekan maka lift akan turun ke lantai 1
3. Pada saat Call 2 ditekan kemudian Call 3 ditekan maka lift akan turun ke lantai 2 dan berhenti sesuai dengan waktu yang ditentukan kemudian akan naik ke lantai 3
4. Pada saat Call 1 ditekan kemudian Call 3 ditekan maka lift akan turun ke lantai 1 dan berhenti sesuai dengan waktu yang ditentukan kemudian akan naik ke lantai 3
5. Pada saat Call 2 dan Call 1 ditekan maka lift akan turun ke lantai 2 dan berhenti sesuai dengan waktu yang ditentukan kemudian akan turun ke lantai 1
6. Pada saat Call 2 ditekan kemudian Call 1 dan Call 3 ditekan maka lift akan turun terlebih dahulu ke lantai 2 dan berhenti sesuai dengan waktu yang ditentukan lalu akan turun ke lantai 1 dan berhemti sesuai dengan waktu yang ditentukan kemudian akan naik ke lantai 3
F. MASALAH :
lift di lantai 2, di call lantai satu tidak akan berfungsi karena tidak ada arus yang masuk yang disebabkan pada NO k4
G. SOLUSI MASALAH :
Memeriksa kembali gambar rangkaian dan meneliti setiap rangkaian pada panel setelah di analisa terdapat pada titik kontak NOk4 yang seharusnya NC K4
BAB IV
PENUTUP
4.1Penutup
laporan ini menyimpulkan bahwa sebelum praktikum mahasiswa harus memakai alat pelindung diri, Serta mengetahui dan memahami cara kerja dari setiap komponen yang akan digunakan. Mahasiswa dapat memahami rangkaian control dari setiap job rangkaian agar mudah untuk menganalisa apabila terjadi kesalahan pada pengawatan rangkaian. Sebelum merancang pada panel harus memeriksa alat terlebih dahulu dan teliti dalam melakukan pengawatan agar tidak terjadi kesalahan yang dapat membahayakan diri sendiri, orang lain maupun peralatan
4.2
KESIMPULAN DAN SARAN
Dari praktek yang telah dilakukan penyusun, penyusun dapat menarik beberapa kesimpulan diantaranya :
1. Rancangan lift ini menggunakan penggabungan rangkaian self holding dan interlock
2. Didalam melakukan perencanaan penginstalasian dibutuhkan perencanaan yang matang, baik dalam hal mempersiapkan alat dan bahan, rancangan yang benar – benar baik dan perhitungan biaya.
3. Gunakanlah semua peralatan dan bahan secara efisien dan baik dalam melakukan penginstalasian.
4. Mampu membaca diagram lokasi maupun diagram kontrol. Karena dengan mampu membaca diagram kontrol penginstalsian akan dapat dengan mudah dikerjakan.
5. Hal yang terpenting dalam penginstalasian adalah pengawatan, karena jika terdapat kesalahan dalam pengawatan,
maka penginstalasian tidak akan bekerja sesuai dengan yang diinginkan. 6. Jika terjadi trouble dalam melakukan penginstalasian, dan terjadi kesalahan
pengoperasian anda harus mampu mencari kesalahan dan memperbaikinya, sehingga penginstalasian anda dapat dikatakan handal.
7. Usahakan dalam bekerja harus memperhatikan keselamatan sekitar dan diri anda sendiri.
DAFTAR PUSTAKA
http://kahael.com/product.php?cid=220http://overseas.sanwa-meter.co.jp/
http://www.google.com.2012.lift atau elevator. http://www.ia.omron.com/
JICA, 1986. Pengaturan Urutan Kerja.
Pengaturan Urutan Kerja (Sequence Control): MAR.LS.002.06.01.2005. Versi: November .
http://www.google.com.2012.lift atau elevator. JICA, 1986. Pengaturan Urutan Kerja.
Pengaturan Urutan Kerja (Sequence Control): MAR.LS.002.06.01.2005. Versi: Nopember .