i
REFLEKSI DAN AKSIOMA CERMIN
PADA BIDANG POINCARÉ
Skripsi
Diajukan untuk Memenuhi Salah Satu Syarat
Memperoleh Gelar Sarjana Pendidikan
Program Studi Pendidikan Matematika
Oleh :
Chintia Rudiyanto
NIM : 091414042
PROGRAM STUDI PENDIDIKAN MATEMATIKA
JURUSAN PENDIDIKAN MATEMATIKA DAN ILMU PENGETAHUAN ALAM
FAKULTAS KEGURUAN DAN ILMU PENDIDIKAN
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
iv
PERSEMBAHAN
Skripsi ini ku persembahkan untuk
semua pihak yang telah membantu
selama proses belajar ku
vii
ABSTRAK
Chintia Rudiyanto, 2013. Refleksi dan Aksioma Cermin Pada Bidang Poincare. Skripsi. Program Studi Pendidikan Matematika, Jurusan
Pendidikan Matematika dan Ilmu Pengetahuan Alam, Fakultas Keguruan dan Ilmu Pendidikan, Universitas Sanata Dharma, Yogyakarta.
Penelitian ini membahas mengenai refleksi dan aksioma cermin pada
bidang Poincare. Selama ini konsep geometri yang banyak dipelajari adalah
seputar geometri Euclid. Padahal, ada berbagai macam sistem geometri yang lain
misalnya geometri Hiperbolik. Bidang Poincare merupakan bidang yang
digunakan dalam geometri Hiperbolik. Setelah membaca penelitian ini,
diharapkan pembaca akan memperoeh wawasan mengenai refleksi dan aksioma
cermin pada bidang Poincare.
Penelitian ini menggunakan metode studi pustaka. Buku acuan yang
digunakan adalah “Geometry : A Metric Approach with Models” karangan
Millman dan Parker. Refleksi dan aksioma cermin ditulis lengkap dengan
definisi-definisi, dan teorema-teoremanya. Selain itu, ditambah juga dengan
pembuktian-pembuktian dari teorema serta penjelasan dan contoh-contohnya.
Hasil dari penelitian ini adalah : (i) Refleksi merupakan suatu fungsi yang
bersifat isometri. (ii) Aksioma cermin adalah konsep mengenai sebuah cermin
dalam garis 𝑙 dalam geometri protraktor. (iii) Konsep cermin dalam 𝑙 adalah
sebuah isometri yang bersifat kolineasi dan mempertahankan sudut.
viii
ABSTRACT
Chintia Rudiyanto, 2013. Reflections and Mirror Axiom in Poincaré Plane.
Thesis. Mathematics Education Study Program, Mathematics and Science Education Department, Faculty of Teacher Training and Education, Sanata DharmaUniversity, Yogyakarta.
This research will be talking about reflections and mirror axiom in
Poincare plane. During this time the most studious concept of geometry is about
Euclidean geometry. In fact, there are a variety of other geometry such as
hyperbolic geometry. Poincare plane is a plane that is used in the hyperbolic
geometry. After reading this research, the reader will get a new knowledge about
reflection and mirror axiom in Poincare plane.
This research use study methods with “Geometry: A Metric Approach
with Models” of Millman & Parker as a mother book. Reflections and mirror
axiom written by added the proof of lemmas and theorems with an explanation
and an example.
The results of this research are: (i) Reflection is an isometric function. (ii)
Mirror axiom is a concept about a mirror in a line in protractor geometry. (iii)
The concept of a mirror in a line is an isometry that preserves line and angle
measure.
ix
KATA PENGANTAR
Puji syukur penulis panjatkan kehadirat Tuhan Yesus Kristus, yang telah
senantiasa melimpahkan rahmat Nya sehingga skripsi dengan judul “Refleksi dan
Aksioma Cermin pada Bidang Poincare” ini dapat penulis selesaikan.
Segala macam hambatan dan rintangan telah banyak penulis alami selama
menyelesaikan skripsi ini. Akan tetapi semua itu telah penulis lalui dengan adanya
dukungan dari banyak pihak. Untuk itu pada kesempatan ini penulis dengan
sepenuh hati ingin mengucapkan terimakasih kepada beberapa pihak, diantaranya:
1. Bapak Dominikus Arif Budi Prasetyo, S.Si., M.Si., selaku Dosen
Pembimbing Akademik dan dosen pembimbing skripsi, yang dengan sabar
memberikan bimbingan akademik dan dorongan selama penulis
melaksanakan studi dan proses penyusunan skripsi.
2. Bapak Dr. M. Andy Rudhito selaku kaprodi pendidikan matematika,
Universitas Sanata Dharma.
3. Bapak Rohandi, Ph.D., selaku Dekan Fakultas Keguruan dan Ilmu
Pendidikan Universitas Sanata Dharma.
4. Ibu Enny Murwaningtyas dan Bapak Sugiarto yang telah menjadi dosen
penguji skripsi, terimakasih atas saran dan bimbingannya selama ini.
5. Semua dosen Pendidikan Matematika yang telah memberikan ilmu selama
penulis kuliah di Universitas Sanata Dharma.
6. Semua staf sekretariat JPMIPA yang telah membantu memberikan
xi
DAFTAR ISI
Halaman
HALAMAN JUDUL ... i
HALAMAN PERSETUJUAN PEMBIMBING ... ii
HALAMAN PENGESAHAN ... iii
HALAMAN PERSEMBAHAN ... iv
PERNYATAAN KEASLIAN KARYA ... v
PERNYATAAN PERSETUJUAN PUBLIKASI KARYA ILMIAH ... vi
ABSTRAK ... vii
ABSTRACT ... viii
KATA PENGANTAR ... ix
DAFTAR ISI ... xi
DAFTAR SIMBOL ... xiii
DAFTAR GAMBAR ... xv
BAB I : PENDAHULUAN Latar Belakang ... 1.1 Latar Belakang... 1
1.2 Rumusan Masalah ... 3
1.3 Batasan Masalah ... 3
1.4 Tujuan Penulisan ... 3
1.5 Manfaat Penulisan ... 3
xii
1.7 Sistematika Penulisan ... 5
BAB II LANDASAN TEORI 2.1 Bidang Kartesius dan Bidang Poincare... 6
2.2 Geometri Abstrak dan Geometri Indiensi ... 11
2.3 Geometri Metrik ... 15
2.4 Keantaraan ... 20
2.5 Segmen, Sinar Garis, Sudut, Segitiga ... 28
2.6 Aksioma Pembagian Bidang ... 34
2.7 Geometri Pash ... 37
2.8 Geometri Protraktor ... 42
2.9 Geometri Netral ... 49
2.10 Kolineasi dan Isometri ... 53
2.11 Refleksi pada bidang Euclid ... 59
BAB III REFLEKSI DAN AKSIOMA CERMIN 3.1 Refleksi ... 63
3.2 Aksioma Cermin ... 97
BAB IV PENUTUP 4.1 Kesimpulan... 104
4.2 Saran ... 106
xiii
DAFTAR SIMBOL
P, Q, R : titik-titik
𝑙 : garis
S : Himpunan titik-titik
ℒ : Himpunan garis-garis
ℳ : Geometri Metrik
𝒜 : Geometri Abstrak
𝐿𝑎 : Garis tipe I pada bidang kartesius
𝐿𝑚,𝑏 : Garis tipe II pada bidang kartesius
ℒ𝐸 : Garis-garis pada bidang Euclid
ℇ : Bidang Kartesius /bidang Euclid
aL : Garis tipe I pada bidang Poincare
cLr : Garis tipe II pada bidang Poincare
ℒ𝐻 : Garis-garis pada bidang Poincare
ℋ : Bidang Poincare
𝑃𝑄
: Garis PQ
𝑃𝑄
: Segmen garis PQ
𝑃𝑄
: Sinar garis PQ
𝑑𝐸 : Jarak dalam bidang Euclides
𝑑𝐻 : Jarak dalam bidang Poincare
xiv
A-B-C : Keantaraan (Titik B diantara titik A dan titik C)
∠𝐴𝐵𝐶 : Sudut ABC
∆𝐴𝐵𝐶 : Segitiga ABC
𝑚 ∠𝐴𝐵𝐷 : Ukuran sudut ABC
∥ : Sejajar
⊥ : Tegak lurus
∅ : Himpunan kosong
⊂ : Himpunan bagian
∩ : Irisan
∪ : Gabungan
∈ : Elemen / Anggota
≅ : Kongruen
𝑖𝑛𝑡 : Interior
∎ : Akhir definisi
□ : Akhir pembuktian
xv
DAFTAR GAMBAR
Gambar 2.1 Garis vertikal pada bidang Kartesius 8
Gambar 2.2 Garis tidak vertikal pada bidang Kartesius 8
Gambar 2.3 Garis 𝑥= 1 pada bidang Kartesius 9
Gambar 2.4 Garis 𝑦=−𝑥+ 3 pada bidang Kartesius 9
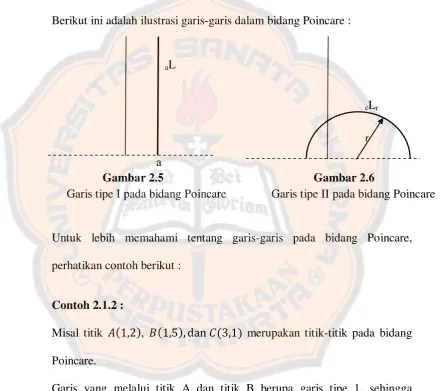
Gambar 2.5 Garis tipe I pada bidang Poincare 10
Gambar 2.6 Garis tipe II pada bidang Poincare 10
Gambar 2.7 Garis 𝑥= 1 pada bidang Poincare 11
Gambar 2.8 Garis 𝑥 −1 2+𝑦2 = 4 pada bidang Poincare 11
Gambar 2.9 A-B-C 24
Gambar 2.10 C-B-A 24
Gambar 2.11 Segmen garis 𝐴𝐵 dalam bidang Euclid 29
Gambar 2.12 Segmen garis 𝐴𝐵 dalam bidang Poincare 29
Gambar 2.13 Sinar garis dalam bidang Euclid 31
Gambar 2.14 Sinar garis dalam bidang Poincare 31
Gambar 2.15 Sudut dalam bidang Euclid 32
Gambar 2.16 Sudut dalam bidang Poincare 32
Gambar 2.17 Segitiga dalam bidang Euclid 34
Gambar 2.18 Segitiga dalam bidang Poincare 34
Gambar 2.19 Aksioma Pembagian Bidang dalam bidang Euclid 35
xvi
Gambar 2.21 Sisi yang saling berlawanan dalam APB 36
Gambar 2.22 Sisi yang sama dalam APB 36
Gambar 2.23 Ilustrasi Postulat Pash 37
Gambar 2.24 Interior ∠𝐴𝐵𝐶 40
Gambar 2.25 Ilustrasi Teorema Crossbar 41
Gambar 2.26 Ilustrasi Definisi 2.8.1 43
Gambar 2.27 Ilustrasi Definisi 2.8.1 43
Gambar 2.28 Ilustrasi sudut dalam bidang Poincare 46
Gambar 2.29 Ilustrasi Teorema 2.8.1 47
Gambar 2.30 Ilustrasi Teorema 2.8.2 dan Teorema 2.8.3 48
Gambar 2.31 ∆𝐴𝐵𝐶 ≃ ∆𝐷𝐸𝐹 50
Gambar 2.32 ∆𝐴𝐵𝐶 ≃ ∆𝐷𝐸𝐹 50
Gambar 2.33 ∆𝐴𝐵𝐶 ≃ ∆𝐷𝐸𝐹 51
Gambar 2.34 ∆𝐴𝐵𝐶 ≃ ∆𝐷𝐸𝐹 52
Gambar 2.35 Ilustrasi Lemma 2.10.3 57
Gambar 2.36 Ilustrasi Lemma 2.10.4 58
Gambar 2.37 Refleksi pada bidang Euclid 59
Gambar 3.1 Refleksi pada bidang Poincare 68
Gambar 3.2 Refleksi terhadap garis 𝑥 =𝑎 68
Gambar 3.3 Refleksi terhadap garis 𝑥 =−2 76
Gambar 3.4 Refleksi titik A(2,1) 77
Gambar 3.5 Refleksi titik B(1,1) 79
xvii
Gambar 3.7 Refleksi titik D(1,10) 81
Gambar 3.8 Ilustrasi pembuktian Teorema 3.1.3 84
Gambar 3.9 Ilustrasi pembuktian Teorema 3.1.3 85
Gambar 3.10 Ilustrasi pembuktian Teorema 3.1.3 85
Gambar 3.11 Ilustrasi pembuktian Teorema 3.1.3 86
Gambar 3.12 Ilustrasi pembuktian Teorema 3.1.3 87
Gambar 3.13 Ilustrasi pembuktian Teorema 3.1.3 87
Gambar 3.14 Ilustrasi pembuktian Teorema 3.1.4 90
Gambar 3.15 Ilustrasi pembuktian Teorema 3.1.4 91
Gambar 3.16 Ilustrasi pembuktian Teorema 3.1.5 93
1
BAB I
PENDAHULUAN
1.1 Latar Belakang
Kata “Geometri” berasal dari bahasa Yunani “geometrein” (geo = bumi, dan metrein = mengukur), yang berarti ilmu pengukuran bumi. Pada
mulanya, Geometri adalah ilmu yang digunakan untuk mengukur lahan
pertanian. Sejarahwan Yunani, Herodotus (5 tahun sebelum Masehi),
mengatakan orang-orang Mesir lah yang pertama kali menggunakan subjek
Geometri, tetapi negara-negara kuno lain (Babylonia, India, Cina) juga
mempunyai beberapa informasi Geometri. (Marvin Jay Greenberg, 1980)
Selama lebih dari 2000 tahun, Geometri identik dengan Geometri
yang berasal dari buku Elements. Buku ini ditulis oleh Euclides sekitar
tahun 300 sebelum Masehi. Sampai abad ke 20, buku ini masih digunakan
sebagai pedoman dalam pembelajaran Geometri di sekolah-sekolah.
Geometri Euclides, seperti dikenal sekarang, dianggap sebagai dasar/fondasi
dari semua ilmu pasti. Namun saat ini, berbagai jenis Geometri yang lain
mulai berkembang. Geometri Non Euclides ditemukan pada awal abad ke-
19. Geometri Non Euclides berkembang sebagai bentuk penyimpangan dari
bertentangan antara Geometri Euclides dan Geometri Hiperbolik yaitu pada
aksioma kesejajaran. Selain hal itu, bidang yang digunakan dalam kedua
jenis geometri ini pun berbeda. Geometri Euclides menggunakan bidang
Kartesius atau disebut juga bidang Euclid, sedangkan Geometri Hiperbolik
menggunakan bidang Poincare. (John Stillwell, 2005)
Dalam pembicaraan mengenai geometri, baik geometri Euclides
ataupun geometri Hiperbolik, terdapat topik geometri transformasi. Menurut
Susanta (1990), istilah geometri transformasi dapat ditafsirkan sebagai
geometri yang membahas transformasi, tetapi dapat juga ditafsirkan sebagai
geometri yang dilandasi oleh transformasi. Transformasi sendiri merupakan
sebuah fungsi yang bersifat bijektif dalam himpunan titik-titik. Dalam
geometri Euclides, dikenal ada beberapa macam transformasi yaitu, refleksi
atau pencerminan, rotasi atau putaran, translasi atau geseran, dan dilatasi.
Sedangkan dalam geometri Hiperbolik, baru dikembangkan mengenai
transformasi berupa refleksi atau pencerminan. Topik transformasi yang
dapat dibandingkan untuk geometri Euclides dan geometri non Euclides
adalah transformasi berupa refleksi.
Selama ini geometri yang telah dipelajari oleh penulis merupakan
bagian dari Geometri Euclides. Penelitian mengenai Geometri Hiperbolik di
Universitas Sanata Dharma pun masih sangat sedikit. Oleh karena itu,
penulis tertarik untuk meneliti mengenai Geometri Hiperbolik ini melalui
1.2 Rumusan Masalah
Rumusan masalah dalam penelitian ini yaitu :
1. Apakah yang dimaksud dengan refleksi dan aksioma cermin?
2. Bagaimanakah sifat-sifat refleksi dan aksioma cermin pada bidang
Poincare?
1.3. Batasan Masalah
Pembahasan mengenai Refleksi dan Aksioma Cermin ini dibatasi
pada:
1. Bidang yang digunakan adalah bidang Poincare.
2. Sistem geometri yang digunakan untuk membahas refleksi dan aksioma
cermin ini adalah Geometri Netral dan Geometri Protraktor.
1.4. Tujuan Penelitian
Tujuan penulisan penelitian ini yaitu :
1. Untuk mengetahui mengenai refleksi dan aksioma cermin pada bidang
Poincare.
2. Untuk mengetahui sifat-sifat refleksi dan aksioma cermin pada bidang
Poincare.
1.5. Manfaat penelitian
1. Bagi Pembaca
Pembaca dapat menambah pengetahuan mengenai refleksi dan aksioma
cermin pada bidang Euclid dan Poincare.
2. Bagi Penulis
Penulis dapat menambah pengetahuan mengenai refleksi dan aksioma
cermin pada bidang Euclid dan Poincare.
3. Bagi Universitas
Universitas dapat menambah koleksi skripsi dalam bidang Geometri.
1.6. Metode Penelitian
Metode yang akan digunakan peneliti dalam menyusun skripsi ini
adalah metode studi pustaka, yaitu dengan membaca referensi-referensi
yang berkaitan dengan refleksi dan aksioma cermin pada bidang Euclid dan
Poincare. Pembahasan dalam tulisan ini sebagian besar diambil dari buku
Geometry : A Metric Approach with Models, karangan Richard Millman dan
Parker (1991) dan ditambah berbagai referensi yang lain.
Langkah-langkah yang dilakukan dalam penelitian ini adalah :
1. Membaca berbagai refrensi yang diperlukan, khusunya mengenai
bidang Poincare, konsep refleksi dan aksioma cermin, serta berbagai
teori-teori yang digunakan untuk membahas materi-materi itu.
2. Menyajikan kembali definisi-definisi pada bab refleksi dan aksioma
cermin.
3. Melengkapi bukti-bukti dari teorema-teorema pada bab refleksi dan
4. Memberikan penjelasan yang diperlukan dan contoh-contoh dari
definisi-definisi yang digunakan.
5. Memberikan penjelasan tambahan, dan contoh-contoh dari
teorema-teorema yang digunakan.
6. Menyusun seluruh materi-materi yang digunakan secara runtut agar
memudahkan pembaca dalam memahami.
1.7 Sistematika Penulisan
Bab pertama berupa pendahuluan. Pendahuluan ini berisi tentang latar
belakang masalah, rumusan masalah, batasan masalah, tujuan dan manfaat
serta metode penelitian dan sistematika penulisan.
Bab dua berisi tentang gambaran umum mengenai berbagai macam
sistem-sistem geometri yang ada. Teori-teori yang digunakan dalam
mendefinisikan berbagai sistem geometri yang ada, segitiga, sudut, sinar
garis, konsep kolineasi dan isometri, konsep refleksi dalam bidang Euclid.
serta definisi-definisi yang digunakan untuk membuktikan teorema yang
dibahas di bab ketiga.
Bab tiga membahas tentang refleksi dan aksioma cermin. Diberikan
juga bukti-bukti teorema serta contoh-contoh yang terkait dengan refleksi
dan aksioma cermin.
Bab keempat atau bab terakhir berisi tentang kesimpulan dari
pembahasan pada bab tiga serta saran yang diberikan penulis kepada
6
BAB II
LANDASAN TEORI
Unsur paling dasar dalam geometri adalah titik. Bermula dari konsep titik,
kemudian membentuk berbagai macam konsep-konsep yang lain seperti garis,
segitiga, sudut dan lain-lain. Dalam geometri, semua unsur-unsur tersebut
memiliki kekhasannya masing-masing dan tergantung dari bidang yang
digunakan.
Berikut akan dibahas mengenai dua jenis bidang yang banyak digunakan
dalam geometri, yaitu bidang Kartesius atau sering disebut sebagai bidang Euclid,
dan bidang Poincare.
2.1 Bidang Kartesius dan Bidang Poincare
Menurut Eisenhart (1960), Bidang Kartesius, umumnya
didefinisikan dengan dua garis yang saling tegak lurus satu sama lain dan
disebut sebagai sumbu x dan sumbu y. Sumbu horizontal diberi label x,
dan sumbu vertikal diberi label y. Perpotongan antara kedua sumbu
tersebut adalah titik O, dan disebut sebagai titik asal. Setiap sumbu juga
mempunyai besaran panjang unit, dan setiap panjang tersebut diberi tanda
positif (+) atau negatif (-) . Untuk mendeskripsikan suatu titik A tertentu
𝑥 adalah jarak dari titik A ke sumbu 𝑦, sedangkan 𝑦 adalah jarak
dari titik A ke sumbu 𝑥. Selanjutnya, 𝑥 disebut sebagai absis dari titik A,
dan 𝑦 disebut sebagai ordinat dari titik A.
Anggap S = ℝ2 = x, y |x, y ∈ ℝ merupakan titik-titik dalam bidang
Kartesius. Kita mendefinisikan himpunan garis sebagai berikut :
Definisi 2.1.1 (Millman & Parker, 1991:18)
(i) Sebuah garis vertikal adalah himpunan bagian dari ℝ2 yang berbentuk
La = x, y ∈ ℝ2 | x = a dengan a adalah bilangan real tertentu.
(ii) Garis tidak vertikal adalah himpunan bagian dari ℝ2 yang berbentuk
Lm ,b = x, y ∈ ℝ2 | y = mx + b dengan m dan b bilangan real
tertentu. ∎
Misalkan ℒ𝐸adalah kumpulan garis-garis tersebut, baik yang vertikal maupun yang tidak vertikal.
Definisi 2.1.2 (Millman & Parker, 1991:18)
Model ℇ= ℝ2,ℒE dinamakan bidang Kartesius. (Notasi L
a dan Lm,b
akan digunakan untuk menyebut garis-garis dalam ℇ.) ∎
Gambar 2.1 mengilustrasikan model garis vertikal dalam bidang Kartesius.
Sedangkan Gambar 2.2 mengilustrasikan model garis yang tidak vertikal
dalam bidang Kartesius.
Untuk lebih memahami tentang garis-garis pada bidang Kartesius,
perhatikan contoh berikut :
Contoh 2.1.1 :
Misal titik 𝐴 1,2 , 𝐵 1,−5 , dan 𝐶(3,0) merupakan titik-titik pada bidang
Kartesius.
Garis yang melalui titik A dan titik B berupa garis vertikal , sehingga
persamaan garis nya adalah 𝑥 = 1. Garis ini ditunjukkan oleh Gambar 2.3.
Garis yang melalui titik A dan titik C berupa garis yang tidak vertikal.
Untuk mengetahui persamaan garisnya, kita harus mencari nilai 𝑚 dan 𝑏.
𝑚= 𝑦2−𝑦1
𝑥2−𝑥1 = 2−0
1−3 =−1
𝑏= 𝑦 − 𝑚𝑥 = 2− −1 1 = 3
Gambar 2.1
Garis Vertikal pada bidang Kartesius
Gambar 2.2
Garis Tidak Vertikal pada bidang Kartesius
La
a
b
Lm ,b
sehingga persamaan garis nya adalah 𝑦= −𝑥+ 3. Garis ini ditunjukkan
oleh Gambar 2.4.
Setelah membahas bidang Kartesius atau bidang Euclid, sekarang kita
akan membahas mengenai bidang Poincare. Bidang Poincare sangat mirip
dengan bidang Kartesius, hanya saja dalam bidang Poincare, tidak ada
sumbu x dan sumbu y negatif. Bidang Poincare hanya terdiri dari setengah
bagian bidang Kartesius, yaitu sisi yang berada di atas sumbu x.
Anggap S = ℍ = 𝑥,𝑦 ∈ ℝ2| 𝑦> 0 merupakan garis-garis dalam
bidang Poincare. Seperti kasus dalam bidang Kartesius kita akan
mendeskripsikan dua tipe garis dalam bidang Poincare sebagai berikut :
Definisi 2.1.3 (Millman & Parker, 1991:19)
(i) Garis tipe I adalah himpunan bagian ℍ yang berbentuk
aL = x, y ∈ ℍ | x = a , dengan a adalah bilangan real tertentu
(ii) Garis tipe II adalah himpunan bagian ℍ yang berbentuk
cLr = x, y ∈ ℍ | x−c 2+ y2 = r2 dengan c, r ∈ ℝ dan r > 0. 𝑥 = 1
𝐵 1,−5 𝐴 1,2
-5
2 𝑦= −𝑥+ 3
𝐴 1,2
𝐶(3,0)
Gambar 2.3
Garis 𝑥= 1 pada bidang Kartesius
Gambar 2.4
Misalkan gabungan dari himpunan garis tipe I dan II adalah ℒH.
Definisi 2.1.4 (Milman & Parker, 1991:20)
Model ℋ= ℍ,ℒH dinamakan bidang Poincare. (Notasi aL dan cLr akan
digunakan untuk menyebut garis-garis dalam ℋ.) ∎
Berikut ini adalah ilustrasi garis-garis dalam bidang Poincare :
Untuk lebih memahami tentang garis-garis pada bidang Poincare,
perhatikan contoh berikut :
Contoh 2.1.2 :
Misal titik 𝐴 1,2 , 𝐵 1,5 , dan 𝐶(3,1) merupakan titik-titik pada bidang
Poincare.
Garis yang melalui titik A dan titik B berupa garis tipe 1, sehingga
persamaan garis nya adalah 𝑥 = 1. Garis ini ditunjukkan oleh Gambar 2.7.
Garis yang melalui titik A dan titik C berupa garis tipe 2. Untuk mencari
persamaan garisnya kita perlu mencari koordinat 𝑐 dan nilai 𝑟 nya.
𝑐 =𝑦22−𝑦12+𝑥22−𝑥12
Garis tipe I pada bidang Poincare
Gambar 2.6
𝑟= (𝑥1− 𝑐)2 +𝑦12 = (1−5
2.2 Geometri Abstrak dan Geometri Insidensi
Dalam geometri, dikenal adanya berbagai macam sistem geometri.
Sistem geometri yang paling sederhana adalah Geometri Abstrak.
Geometri abstrak merupakan suatu sistem geometri yang hanya terdiri dari
titik dan garis.
Definisi 2.2.1 (Millman & Parker, 1991:17)
Sebuah geometri abstrak 𝒜 terdiri dari himpunan S yang unsur-unsurnya
disebut titik dan himpunan ℒ yang unsur-unsurnya himpunan bagian yang
(i) Untuk setiap dua titik A, B ∈ S terdapat sebuah garis l ∈ ℒ dengan A
∈l dan B ∈l.
(ii)Setiap garis mempunyai paling sedikit dua titik. ∎
Jika 𝒜= { S ,ℒ } adalah sebuah geometri abstrak dengan P ∈ S , 𝑙 ∈ ℒ,
dan P ∈ 𝑙, kita katakan bahwa P terletak pada garis 𝑙.
Aksioma pertama dari Geometri Abstrak mengatakan bahwa setiap satu
pasang titik pasti terletak pada sebuah garis yang sama. Perlu kita ingat
pula bahwa “garis” tidak berarti yang dimaksud adalah garis lurus.
Contoh 2.2.1 :
ℇ= ℝ2,ℒ
𝐸 adalah sebuah geometri abstrak.
Bidang Euclid termasuk dalam geometri abstrak karena dalam bidang
Euclid, terdapat titik-titik dan juga garis-garis seperti yang sudah dibahas
pada Definisi 2.1.1. ●
Contoh 2.2.2:
ℋ = ℍ,ℒ𝐻 adalah sebuah geometri abstrak.
Bidang Poincare juga termasuk dalam geometri abstrak karena dalam
bidang Poincare juga terdapat titik-titik dan garis-garis seperti yang sudah
dibahas pada Definisi 2.1.3 ●
Definisi 2.2.2 (Millman & Parker, 1991:22)
Sebuah geometri abstrak { S ,ℒ } dikatakan geometri insidensi jika:
1. Setiap dua titik yang berbeda dalam S terletak pada sebuah garis
2. Terdapat tiga titik A, B, C ∈ S yang tidak semuanya berada pada
garis yang sama. ∎
Jika { S ,ℒ } merupakan geometri insidensi dan P, Q ∈S maka sebuah
garis 𝑙 yang melalui titik P dan Q, akan ditulis sebagai 𝑙= 𝑃𝑄 .
Aksioma kedua (Definisi 2.2.2(2) ) dari geometri insidensi dapat
dikemukakan kembali dengan menggunakan konsep kolinear, yang akan
dibahas pada Definisi 2.2.3.
Definisi 2.2.3 (Millman & Parker, 1991:22)
Himpunan titik-titik P disebut kolinear jika ada sebuah garis l sehingga
P⊂ l. ∎
Definisi 2.2.3 mengatakan bahwa himpunan titik-titik P disebut kolinear
jika semua anggota P terletak pada garis yang sama. Sebaliknya, P disebut
tidak kolinear jika P bukan himpunan titik yang kolinear. Atau dengan kata
lain, himpunan P disebut tidak kolinear jika tidak semua anggota P terletak
pada garis yang sama. Dengan menggunakan Definisi 2.2.3 di atas, maka
aksioma kedua dari geometri insidensi dapat ditulis kembali sebagai
berikut :
Definisi 2.2.2(2a) :
Contoh 2.2.3:
Bidang Kartesius dan Bidang Poincare merupakan geometri insidensi.
Dalam Contoh 2.2.1 dan Contoh 2.2.2 telah disebutkan bahwa bidang
Euclid dan bidang Poincare merupakan geometri abstrak. Dari Contoh
2.1.1 dan Contoh 2.1.2 juga ditunjukkan bahwa dari setiap dua titik dapat
ditentukan sebuah garis yang melaluinya. Seandainya , terdapat tiga buah
titik, maka belum tentu titik yang ketiga memenuhi persamaan garis yang
terbentuk oleh dua titik lainnya. Oleh karena itu, bidang Euclides dan
bidang Poincare merupakan geometri insidensi. ●
Selain konsep kolinear, dalam geometri abstrak dan geometri insidensi
juga dikenal adanya konsep kesejajaran.
Teorema 2.2.1 (Millman & Parker, 1991:24)
Misalkan 𝑙1 dan 𝑙2 adalah garis-garis dalam geometri insidensi. Jika
𝑙1 dan 𝑙2 memiliki dua titik yang sama atau lebih, maka 𝑙1 = 𝑙2.
Bukti :
Anggap 𝑃 ≠ 𝑄, 𝑃 ∈ 𝑙1 ∩ 𝑙2 dan 𝑄 ∈ 𝑙1 ∩ 𝑙2. Karena kedua titik P dan
Q terletak pada 𝑙1, maka 𝑃𝑄 = 𝑙1. Padahal titik P dan Q juga terletak pada
𝑙2 sehingga 𝑃𝑄 = 𝑙2. Karena itu, 𝑙1 =𝑙2. □
Teorema 2.2.1 mengatakan jika ada 2 garis dalam geometri insidensi (garis
melewati titik A dan B, maka garis 𝑙1 sebenarnya sama dengan garis 𝑙2.
Dua garis yang demikian biasa disebut dua garis yang berhimpit.
Definisi 2.2.4 (Millman & Parker, 1991:24)
Jika l1 dan l2 adalah garis-garis dalam geometri abstrak, maka l1 dikatakan
sejajar dengan l2 (ditulis l1 ∥ l2) jika l1 = l2 atau l1∩l2 =∅. ∎
Definisi 2.2.4 mengatakan bahwa dua garis dikatakan sejajar jika
garis-garis tersebut berhimpit atau tidak mempunyai titik potong.
2.3 Geometri Metrik
Sekarang kita akan membahas mengenai geometri metrik.
Geometri ini adalah geometri yang memperhitungkan mengenai jarak 2
buah titik dalam suatu bidang. Oleh karena itu, sebelum kita membahas
mengenai geometri metrik lebih lanjut, mula-mula akan dibahas dahulu
mengenai definisi fungsi jarak.
Definisi 2.3.1 (Millman & Parker, 1991:28)
Fungsi jarak pada himpunan S adalah fungsi d : S x S → ℝ sehingga
untuk setiap P,Q ∈S berlaku :
1. d(P,Q) ≥0
2. d(P,Q) = 0 jika dan hanya jika P = Q , dan
3. d(P,Q) = d(Q, P) ∎
Aksioma pertama dari Definisi 2.3.1 mengatakan bahwa nilai dari jarak
yang negatif. Aksioma kedua mengatakan jika ada dua titik yang sama,
maka jaraknya pasti nol. Sedangkan aksioma ketiga mengatakan bahwa
jarak titik P dan Q sama dengan jarak titik Q dan P.
Selanjutnya akan dibahas mengenai jarak dua titik dalam bidang Euclid
dan bidang Poincare.
Definisi 2.3.2 ( Smith & Ulrich, 1956:487)
Misalkan P = (x1, y1) dan Q = (x2, y2) adalah titik-titik dalam bidang
Euclid. Jarak dalam bidang Euclid diberikan oleh :
d P, Q = x2−x1 2+ (y
2−y1)2 ∎
Selanjutnya, jarak dalam bidang Euclid dapat disimbolkan sebagai (𝑑𝐸), untuk membedakan dengan jarak Poincare.
Untuk lebih memahami mengenai jarak titik pada bidang Euclid,
perhatikan contoh berikut :
Contoh 2.3.1 :
Misalkan titik 𝐴 2,3 dan 𝐵(4,0) adalah titik-titik dalam bidang Euclid
atau bidang Kartesius. Maka jarak Euclidesnya adalah :
𝑑𝐸 𝐴,𝐵 = 2−4 2+ (3−0)2
= 4 + 9 = 13
Setelah membahas mengenai jarak dua titik dalam bidang Euclides,
sekarang kita akan membahas mengenai jarak dua titik dalam bidang
Poincare.
Definisi 2.3.3 (Millman & Parker, 1991:28)
Jika P = (x1, y1) dan Q = (x2, y2) adalah titik dalam bidang Poincare ℋ,
Untuk lebih memahami mengenai jarak titik dalam bidang Poincare,
perhatikan contoh berikut :
Contoh 2.3.2 :
Misal 𝐴 2,3 , 𝐵 2,5 , 𝐶(4,1) adalah titik-titik dalam bidang Poincare.
Jarak Poincare titik A dan B adalah :
𝑑𝐻 𝐴,𝐵 = 𝑙𝑛 𝑦𝑦21 = 𝑙𝑛 53 Jarak Poincare titik A dan C adalah :
= 𝑙𝑛
Konsep fungsi jarak yang sudah kita bahas di atas merupakan konsep yang
cukup penting dalam pembahasan sistem geometri metrik.
Definisi 2.3.4 (Millman & Parker, 1991:30)
Misalkan 𝑙 adalah sebuah garis dalam geometri insidensi { S ,ℒ }
Asumsikan bahwa terdapat fungsi jarak d pada S . Fungsi f: l→ ℝ
disebut sistem koordinat untuk l jika :
1. f bijektif
2. Untuk setiap pasangan titik P dan Q pada l berlaku f P − f(Q) =
d (P, Q). (2.3.1)
∎
Persamaan (2.3.1) disebut persamaan sistem koordinat dan 𝑓(𝑃) disebut
Definisi 2.3.5 (Millman & Parker, 1991:30)
Sebuah geometri insidensi { S ,ℒ } bersama dengan fungsi jarak d
memenuhi postulat sistem koordinat jika setiap 𝑙 ∈ S memiliki sistem
koordinat. ∎
Dalam hal ini kita katakan, ℳ = { S ,ℒ,𝑑 } adalah sebuah geometri
metrik.
Untuk lebih memahami Definisi 2.3.5, perhatikan contoh berikut :
Contoh 2.3.2 :
Bidang Kartesius adalah sebuah geometri metrik.
Hal ini dikarenakan bidang kartesius merupakan sebuah geometri
insidensi. Selain itu, dalam bidang Kartesius terdapat fungsi jarak Euclides
𝑑𝐸 seperti yang sudah dibahas pada Definisi 2.3.2.
Jadi, bidang kartesius atau bidang Euclid merupakan geometri metrik.●
Contoh 2.3.3 :
Jika 𝑑𝐻 adalah fungsi jarak untuk bidang Poincare, maka ℍ,ℒ𝐻,𝑑𝐻
adalah sebuah geometri metrik.
Contoh 2.2.3 mengatakan bahwa bidang Poincare merupakan geometri
insidensi. Selain itu, dalam Definisi 2.3.3 dijelaskan mengenai fungsi jarak
yang berlaku dalam bidang Poincare. Oleh karena itu, bidang Poincare
Selanjutnya, akan diberikan lemma mengenai sistem koordinat.
Lemma 2.3.1 (Millman & Parker, 1991:31)
Misalkan l ∈ ℒ dan f ∶l→ ℝ fungsi surjektif dan memenuhi persamaan
(2.3.1). Maka f adalah fungsi bijektif dan karena itu merupakan sistem
koordinat untuk l.
Bukti :
Karena kita mengasumsikan 𝑓 adalah surjektif, maka untuk membuktikan
𝑓 adalah fungsi bijektif, kita hanya perlu menunjukkan bahwa 𝑓 adalah
injektif. Sekarang anggap bahwa 𝑓 𝑃 = 𝑓(𝑄) .
Dari persamaan (2.3.1) kita dapat 𝑑 𝑃,𝑄 = 𝑓 𝑃 − 𝑓(𝑄) = 0,
sehingga menurut definisi fungsi jarak, P = Q. □
2.4 Keantaraan
Keantaraan merupakan konsep yang juga cukup penting. Ada
banyak cara yang digunakan untuk mendefinisikan konsep keantaraan.
Berikut ini akan diberikan postulat mengenai keantaraan secara aksiomatik
terlebih dahulu, kemudian secara metrik.
Definisi 2.4.1 (Prenowitz & Jordan, 1965 : 186)
Dalam pembahasan secara aksiomatik, notasi untuk keantaraan adalah
(a-b-c) dan dibaca sebagai b di antara a dan c. Relasi keantaraan memenuhi
sistem postulat berikut :
B2. (Sifat antisiklik) Jika (a-b-c) maka bukan (b-c-a)
B3. (Koherensi linear) a, b, c adalah titik-titik yang berbeda dan kolinear
jika dan hanya jika (a-b-c) atau (b-c-a) atau (c-a-b)
B4. (Sifat memisahkan) Misalkan sebuah titik P yang kolinear dan berbeda
dengan titik a, b, c. Maka, (a-p-b) mengakibatkan (b-p-c) atau (a-p-c) tapi
tidak keduanya.
B5. (Eksistensi) Jika a ≠ b, maka ada x, y, z sedemikian sehingga (x-a-b),
(a-y-b), (a-b-z). ∎
Postulat-postulat tersebut cukup mudah dimengerti. Postulat B1
mengatakan bahwa jika titik b berada di antara a dan c, maka titik b juga
berada di antara c dan a. Dari potulat pertama ini kita dapat menarik
kesimpulan bahwa relasi keantaraan ini bersifat simetri . Yang terpenting
adalah posisi titik yang terletak ditengah. Postulat B2 ingin mengatakan
bahwa permutasi siklik tidak berlaku dalam keantaraan. Jika b berada di
antara a dan c, maka pernyataan bahwa c berada di antara a dan b adalah
salah. Postulat B3 berupa biimplikasi sehingga dapat diartikan menjadi 2
implikasi, yaitu :
B3.1 Jika (a-b-c) maka a, b, dan c adalah tiga titik berbeda dan kolinear.
B3.2 Jika a, b dan c adalah tiga titik yang berbeda dan kolinear maka
(a-b-c), atau (b-c-a) atau (c-a-b)
Postulat B4 mengatakan jika sebuah titik P memisahkan a dari b, maka
Postulat B5 berbicara mengenai eksistensi 3 buah titik sedemikian
sehingga jika titik a tidak sama dengan b , maka
i) ada sebuah titik yang memisahkan titik a dan b.
ii) ada sebuah titik yang dipisahkan dari b oleh titik a, artinya titik a
terletak di antara titik b dan titik lain.
iii) ada sebuah titik yang dipisahkan dari a oleh b, artinya, titik b
terletak di antara titik a dan titik lainnya.
Selanjutnya, akan diberikan definisi keantaraan dengan pendekatan metrik.
Definisi 2.4.2 (Millman & Parker, 1991:47):
B di antara A dan C, jika A, B, C adalah 3 titik berbeda yang kolinear
dalam geometri metrik { S ,ℒ, d } , dan jika d 𝐴,𝐵 +𝑑 𝐵,𝐶 =
𝑑 (𝐴,𝐶) ∎
Dalam geometri metrik, B di antara A dan C dinotasikan sebagai A-B-C.
Dan jarak 𝑑 𝐴,𝐵 dinotasikan sebagai AB.
Yang perlu diperhatikan dari Definisi 2.4.2 adalah ketiga titik harus
kolinear atau segaris. Jika tidak segaris, maka tidak bisa memenuhi konsep
keantaraan. Selanjutnya, ketiga titik yang segaris tersebut harus memenuhi
𝐴𝐵+𝐵𝐶 = 𝐴𝐶 agar bisa memenuhi Definisi 2.4.2. Jika kedua syarat
tersebut terpenuhi, maka titik B dapat dikatakan terletak diantara titik A
dan C.
Contoh 2.4.1 :
Misalkan 𝐴 2,0 ,𝐵 2,5 ,𝐶(2,6) adalah titik-titik dalam geometri
Euclides. Untuk membuktikan bahwa ketiga titik tersebut kolinear, kita
perlu mencari garis yang melewati titik A dan B, kemudian kita cek
apakah garis tersebut juga melewati titik C. Jika iya, maka ketiga titik
tersebut kolinear, tetapi jika tidak maka ketiga titik tersebut tidak kolinear.
Garis yang melewati titik A dan B adalah garis 𝑥 = 2. Ternyata garis
tersebut juga melewati titik C. Oleh karena itu ketiga titik tersebut
merupakan titik-titik yang kolinear.
Sekarang kita perlu mencari jarak tiap 2 titik.
𝐴𝐵 = (2−2)2+ (5−0)2 = 5
𝐴𝐶 = (2−2)2+ (6−0)2 = 6
𝐵𝐶= (2−2)2+ (6−5)2 = 1
𝐴𝐵+𝐵𝐶 = 5 + 1 = 6 =𝐴𝐶.
Dari perhitungan di atas terlihat bahwa 𝐴𝐵+𝐵𝐶 =𝐴𝐶. Maka, titik B
terletak di antara A dan C. ●
Teorema 2.4.1 (Millman & Parker, 1991:49):
Jika A-B-C maka C-B-A.
Bukti :
Jika A, B, dan C adalah 3 titik yang berbeda dan kolinear, maka begitu
= AC. Karena PQ = QP untuk semua P dan Q, kita mempunyai BA +CB =
CA atau CB +BA = CA yang menunjukkan bahwa C-B-A. □
Untuk lebih memahami Teorema 2.4.1, perhatikan gambar berikut :
Gambar 2.9 menunjukkan titik B di antara A dan C. Gambar 2.10
menunjukkan titik B di antara A dan C.
Melihat dari kedua gambar di atas dan isi Teorema 2.4.1 , kita dapat
menyimpulkan bahwa yang konsep yang paling penting dalam keantaraan
bukanlah posisinya, tetapi jaraknya.
Selanjutnya, akan dibahas mengenai konsep keantaraan dalam bilangan
real.
Definisi 2.4.3 (Bartle & Sherbert, 1927:44)
Untuk setiap x dan y adalah sembarang bilangan real dengan x < y,
terdapat sebuah bilangan real r, sedemikian sehingga x < r < y
x < r < y berarti x < r dan r < y. ∎
Untuk lebih memahami Definsi 2.4.3, perhatikan contoh berikut :
A
B
C
Gambar 2.9 A-B-C
C
B
A
Contoh 2.4.2 :
Misalkan ada 2 bilangan real, yaitu 3 dan 8. Karena 3 < 8, maka kita bisa
mencari suatu bilangan real yang terletak di antara 3 dan 8, misalnya 5,
sedemikian sehingga 3 < 5 <8 terpenuhi. ●
Selanjutnya, akan dibahas Teorema 2.4.2, Teorema ini ada sebagai bentuk
gabungan dari Definisi 2.4.1 dan Definisi 2.4.2. Teorema ini
menggabungkan konsep keantaraan dalam titik dengan konsep keantaraan
bilangan.
Teorema 2.4.2 (Millman & Parker, 1991:49)
Anggap l adalah sebuah garis dan f sebuah sistem koordinat untuk 𝑙. Jika
A, B, dan C adalah 3 titik pada garis l dengan koordinat x, y, z , maka
A-B-C jika dan hanya jika x < y < z.
Bukti :
Perhatikan, jika A,B, dan C adalah titik yang sama, maka A-B-C dan x < y
< z, keduanya jelas salah. Karena itu, kita mengasumsikan bahwa A,B, dan
C adalah tiga titik yang berbeda.
Pertama, kita akan membuktikan jika A-B-C maka x < y < z.
Diketahui bahwa x = f(A), y=f(B) , z=f(C), dan AB + BC = AC. Maka
menurut definisi fungsi jarak,
AB = 𝑓 𝐴 − 𝑓(𝐵) = 𝑥 − 𝑦 BC = 𝑦 − 𝑧 AC = 𝑥 − 𝑧
Kita harus menunjukkan bahwa persamaan tersebut mengakibatkan x < y
< z atau z < y < x.
Karena A,B,C adalah 3 titik yang berbeda, maka hanya satu kondisi untuk
x,y,z yang tepat dari antara berbagai kemungkinan berikut :
(i) x < y < z
(ii) z < y < x
(iii) y < x < z
(iv) z < x < y
(v)x < z < y
(vi)y < z < x
Kita akan menunjukkan bahwa dalam kasus (iii) akan terjadi kontradiksi.
Kasus (iii) mengakibatkan
𝑥 − 𝑦 = 𝑥 − 𝑦 𝑦 − 𝑧 = 𝑧 − 𝑦 𝑥 − 𝑧 =𝑧 − 𝑥
Jika kita memasukkan persamaan tersebut ke dalam persamaan (2.4.1),
maka
𝑥 − 𝑦+𝑧 − 𝑦= 𝑧 − 𝑥
𝑥 =𝑦
Hal ini kontradiksi dengan pernyataan bahwa x,y,z adalah berbeda.
Karena itu, kasus (iii) tidak memenuhi.
Kasus (iv) mengakibatkan
𝑥 − 𝑦 = 𝑦 − 𝑥 𝑦 − 𝑧 = 𝑦 − 𝑧 𝑥 − 𝑧 =𝑥 − 𝑧
Jika kita memasukkan persamaan tersebut ke dalam persamaan (2.4.1),
maka
𝑦 − 𝑥+𝑦 − 𝑧= 𝑥 − 𝑧
𝑦 =𝑥
Karena itu, kasus (iv) tidak memenuhi.
Kasus (v) mengakibatkan
𝑥 − 𝑦 = 𝑦 − 𝑥 𝑦 − 𝑧 = 𝑦 − 𝑧 𝑥 − 𝑧 =𝑧 − 𝑥
Jika kita memasukkan persamaan tersebut ke dalam persamaan (2.4.1),
maka
𝑦 − 𝑥+𝑦 − 𝑧= 𝑧 − 𝑥
𝑦= 𝑧
Hal ini kontradiksi dengan pernyataan bahwa x,y,z adalah berbeda.
Karena itu, kasus (v) tidak memenuhi.
Kasus (vi) mengakibatkan
𝑥 − 𝑦 = 𝑥 − 𝑦 𝑦 − 𝑧 = 𝑧 − 𝑦 𝑥 − 𝑧 =𝑥 − 𝑧
Jika kita memasukkan persamaan tersebut ke dalam persamaan (2.4.1),
maka
𝑥 − 𝑦+𝑧 − 𝑦= 𝑥 − 𝑧
𝑧=𝑦
Hal ini kontradiksi dengan pernyataan bahwa x,y,z adalah berbeda.
Karena itu, kasus (vi) tidak memenuhi.
Jadi yang memungkinkan hanyalah kasus (i) atau kasus (ii), sehingga
terbukti bahwa x < y < z.
Sekarang kita akan menunjukkan jika x < y < z maka A-B-C.
Anggap x<y<z (untuk kasus z<y<x sama saja). Dalam kasus ini
𝑥 − 𝑦 =𝑦 − 𝑥 𝑦 − 𝑧 = 𝑧 − 𝑦 𝑥 − 𝑧 = 𝑧 − 𝑥
atau 𝑓 𝐴 − 𝑓(𝐵) + 𝑓(𝐵)− 𝑓(𝐶) = 𝑓(𝐴)− 𝑓(𝐶)
atau AB + BC = AC.
Jadi, A,B,C adalah tiga titik yang kolinear dan berbeda, serta A-B-C. □
2.5 Segmen, Sinar Garis, Sudut, Segitiga
Segmen garis, dan sinar garis, merupakan konsep yang penting
dalam geometri. Konsep segmen garis ini sangat berperan dalam konsep
segitiga. Sedangkan konsep sinar garis akan berperan dalam konsep sudut.
Berikut ini akan dibahas mengenai konsep segmen garis.
Definisi 2.5.1(Millman & Parker, 1991:52)
Jika A dan B adalah titik berbeda dalam geometri metrik { S ,ℒ, d } maka
segmen garis dari A ke B adalah himpunan
𝐴𝐵
= 𝐶 ∈ S |𝐴 − 𝐶 − 𝐵𝑎𝑡𝑎𝑢𝐶 =𝐴𝑎𝑡𝑎𝑢𝐶= 𝐵 ∎
Definisi 2.5.1 berbicara mengenai segmen garis. Segmen garis ini mulai
dikenal dalam sistem geometri metrik. Segmen garis merupakan kumpulan
titik-titik yang terletak di antara dua titik tertentu. Dua titik tertentu
tersebut adalah ujung-ujung dari segmen garis. Segmen garis dinotasikan
dengan 𝐴𝐵 , dimana titik A dan B adalah kedua titik ujung dari segmen
garis.
Definisi 2.5.2 (Millman & Parker, 1991:54)
Titik akhir dari segmen AB adalah A dan B. Panjang segmen AB adalah
Definisi 2.5.2 mengatakan bahwa titik akhir atau titik ujung dari segmen
𝐴𝐵
adalah dua buah titik A dan B. Selain itu, panjang segmen garis
tersebut adalah jarak dari kedua titik ujungnya.
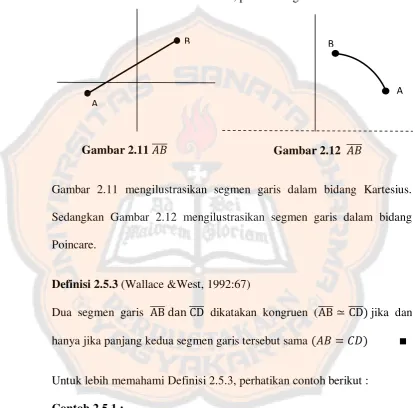
Untuk lebih memahami Definisi 2.5.1, perhatikan gambar berikut :
Gambar 2.11 mengilustrasikan segmen garis dalam bidang Kartesius.
Sedangkan Gambar 2.12 mengilustrasikan segmen garis dalam bidang
Poincare.
Definisi 2.5.3 (Wallace &West, 1992:67)
Dua segmen garis AB dan CD dikatakan kongruen (AB ≃ CD) jika dan
hanya jika panjang kedua segmen garis tersebut sama(𝐴𝐵= 𝐶𝐷) ∎
Untuk lebih memahami Definisi 2.5.3, perhatikan contoh berikut :
Contoh 2.5.1 :
Misalkan ada 3 segmen garis 𝐴𝐵 , 𝐵𝐶 dan 𝐴𝐶 , dimana 𝐴 1, 1 , 𝐵 1,3 ,
𝐶(1, 5). Dari 2 segmen tersebut, kita akan mencari dua segmen yang
saling kongruen. Pertama-tama kita harus mencari panjang tiap segmen
garis.
Gambar 2.12 𝐴𝐵 Gambar 2.11 𝐴𝐵
A
B
Jika ketiga titik tersebut berada pada bidang Euclid, maka jarak tiap
segmen adalah :
𝐴𝐵 = (1−1)2+ (1−3)2 = 2
𝐴𝐶 = (1−1)2+ (1−5)2 = 4
𝐵𝐶= (1−1)2+ (3−5)2 = 2
Karena 𝐴𝐵= 𝐵𝐶, maka 𝐴𝐵 ≃ 𝐵𝐶 .
Sekarang, jika ketiga titik tersebut berada pada bidang Poincare. Maka,
jarak tiap segmen adalah :
𝐴𝐵 = 𝑙𝑛 3
1 = ln 3
𝐴𝐶 = 𝑙𝑛 5
1 = ln 5
𝐵𝐶= 𝑙𝑛 5
3 = ln 5 3
Karena 𝐴𝐵 ≠ 𝐴𝐶 ≠ 𝐵𝐶, maka menurut Poincare, ketiga segmen garis
tersebut tidak ada yang saling kongruen. ●
Selanjutnya akan dibahas mengenai sinar garis.
Definisi 2.5.4 (Millman & Parker, 1991:54)
Jika A dan B adalah 2 titik yang berbeda dalam geometri metrik {S ,ℒ, d}
maka sinar garis dari A melewati B adalah himpunan
𝐴𝐵
= 𝐴𝐵 ∪ 𝐶 ∈ S |𝐴 − 𝐵 − 𝐶 ∎
Perlu diingat bahwa sinar garis 𝐴𝐵 merupakan himpunan bagian dari garis
𝐴𝐵
hingga titik B terletak di antara titik A dan titik tersebut. Sinar garis
𝐴𝐵
hanya memiliki 1 ujung yaitu titik A, sedangkan ujung yang lain
terletak di tak hingga. Oleh karena itu, titik A disebut juga sebagai titik
asal sinar 𝐴𝐵 seperti disebutkan dalam Definisi 2.5.5 berikut :
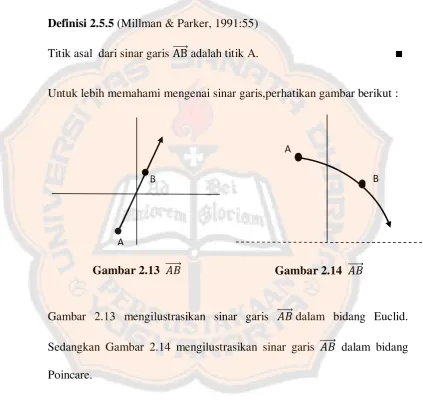
Definisi 2.5.5 (Millman & Parker, 1991:55)
Titik asal dari sinar garis AB adalah titik A. ∎
Untuk lebih memahami mengenai sinar garis,perhatikan gambar berikut :
Gambar 2.13 mengilustrasikan sinar garis 𝐴𝐵 dalam bidang Euclid.
Sedangkan Gambar 2.14 mengilustrasikan sinar garis 𝐴𝐵 dalam bidang
Poincare.
Setelah memahami mengenai sinar garis, sekarang kita akan membahas
mengenai sudut.
A B
A
B
Definisi 2.5.6 (Millman & Parker, 1991:59)
Jika A, B, dan C adalah titik-titik yang tidak segaris dalam geometri
metrik, maka sudut ∠ABCadalah himpunan
∠𝐴𝐵𝐶 =𝐵𝐴 ∪ 𝐵𝐶 . ∎
Definisi 2.5.7 (Millman & Parker, 1991:61)
Titik sudut dari sudut ∠ABC dalam geometri metrik adalah titik B. ∎
Definisi 2.5.6 mengatakan bahwa sudut merupakan gabungan dari dua
buah sinar garis yang mempunyai titik asal yang sama. Titik asal inilah
yang kemudian disebut sebagai titik sudut, seperti didefinisikan pada
Definisi 2.5.7.
Untuk lebih memahami mengenai sudut, perhatikan gambar berikut :
Gambar 2.15 mengilustrasikan ∠𝐴𝐵𝐶 dalam bidang Euclid. Sedangkan
Gambar 2.16 mengilustrasikan ∠𝐴𝐵𝐶 dalam bidang Poincare. Dari kedua
gambar sudut di atas, titik B merupakan titik sudutnya.
Gambar 2.16 ∠𝐴𝐵𝐶 Gambar 2.15 ∠𝐴𝐵𝐶
C
B
A
B
Definisi 2.5.8 (Wallace &West, 1992:67)
Dua sudut (∠𝐴𝐵𝐶𝑑𝑎𝑛∠𝐷𝐸𝐹) dikatakan kongruen (∠𝐴𝐵𝐶 ≃ ∠𝐷𝐸𝐹)
jika dan hanya jika ukuran sudut keduanya sama besar 𝑚∠𝐴𝐵𝐶=
𝑚∠𝐷𝐸𝐹 . ∎
Setelah membahas mengenai sudut, selanjutnya kita akan membahas
mengenai segitiga.
Definisi 2.5.8 (Millman & Parker, 1991:61)
Jika A, B, C merupakan himpunan titik-titik yang tidak segaris dalam
geometri metrik, maka segitiga ABC adalah himpunan
∆𝐴𝐵𝐶 =𝐴𝐵 ∪ 𝐵𝐶 ∪ 𝐶𝐴 . ∎
Definisi 2.5.9 (Millman & Parker, 1991:62)
Dalam geometri metrik, titik-titik sudut dari ∆ABC adalah titik A, B, dan
C. Sisi-sisi (atau rusuk) dari ∆ABC adalah AB , BC dan CA . ∎
Definisi 2.5.8 mengatakan bahwa segitiga merupakan gabungan dari 3
segmen garis yang berbeda. Ketiga segmen garis tersebut kemudian
disebut sebagai sisi atau rusuk dari segitiga.
Gambar 2.17 mengilustrasikan segitiga dalam bidang Euclid. Sedangkan
Gambar 2.18 mengilustrasikan segitiga dalam bidang Poincare.
Dari kedua gambar tersebut terlihat bahwa terdapat tiga segmen garis yaitu
𝐴𝐵
,𝐵𝐶 dan 𝐶𝐴 , ketiga segmen garis tersebut merupakan sisi dari
segitiga 𝐴𝐵𝐶. Sedangkan titik sudut dari segitiga 𝐴𝐵𝐶, adalah titik A, B
dan C.
2.6 Aksioma Pembagian Bidang
Aksioma Pembagian Bidang (Plane Separation Axiom ) ,
merupakan ide yang sangat intuitif bahwa setiap garis mempunyai “dua
sisi” yang dibatasi oleh garis itu sendiri.
Sebelum kita membahas mengenai Aksioma Pembagian Bidang, kita perlu
memahami dulu mengenai konsep konveks dalam sebuah bidang, seperti
dibahas pada Definisi 2.6.1 berikut :
Definisi 2.6.1 (Millman & Parker, 1991:63)
Misalkan { S ,ℒ, d } adalah geometri metrik dan S 1 ⊂ S dikatakan
konveks jika untuk setiap dua titik P, Q ∈ S 1, terdapat segmen garis
PQ
⊂S 1. ∎
Gambar 2.18 ∆𝐴𝐵𝐶 Gambar 2.17 ∆𝐴𝐵𝐶
B
B
Definisi 2.6.1 mengatakan agar suatu bidang disebut konveks, maka untuk
setiap dua titik dalam bidang tersebut (misal titik P dan Q), terdapat
segmen garis 𝑃𝑄 yang semua anggotanya juga terletak pada bidang
tersebut. Jadi tidak hanya sebagian dari segmen garis 𝑃𝑄 yang terletak
dalam bidang, melainkan harus seluruh segmen garis 𝑃𝑄 .
Setelah memahami mengenai konsep konveks, sekarang mari kita
membahas mengenai konsep Aksioma Pembagian Bidang (APB).
Definisi 2.6.2 (Millman & Parker, 1991:64)
Sebuah geometri metrik { S ,ℒ, d } memenuhi Aksioma Pembagian
Bidang jika untuk setiap l∈ ℒ terdapat dua himpunan bagian H1 dan H2
dari S (selanjutnya disebut bidang paruh yang dibentuk oleh l ) sehingga:
1. S −𝑙 = 𝐻1 ∪ 𝐻2
2. 𝐻1 dan 𝐻2 saling lepas dan konveks
3. Jika 𝐴 ∈ 𝐻1 dan 𝐵 ∈ 𝐻2 maka 𝐴𝐵 ∩ 𝑙 ≠ ∅ ∎
Untuk lebih memahami mengenai konsep Aksioma Pembagian Bidang,
perhatikan gambar berikut :
Gambar 2.19 𝑙
𝐻2
𝐻1
𝐻2
𝐻1
𝑙
Gambar 2.19 menggambarkan konsep Aksioma Pembagian bidang dalam
bidang Euclid. Sedangkan Gambar 2.20 menggambarkan konsep APB
dalam bidang Poincare. Terlihat dari kedua gambar di atas bahwa garis 𝑙
memisahkan bidang menjadi dua buah bagian. Bagian pertama disebut 𝐻1
dan bagian kedua disebut sebagai 𝐻2.
Sekarang akan diberikan definisi mengenai cara menyebut 2 titik yang
terletak pada salah satu atau kedua buah sisi 𝐻1 dan 𝐻2.
Definisi 2.6.3 (Millman & Parker, 1991:66)
Misalkan { S ,ℒ, d } adalah geometri metrik yang memenuhi APB,
𝑙 ∈ ℒ, H1 dan H2 adalah bidang paruh yang dibentuk oleh 𝑙. Dua titik A
dan B dikatakan berada pada sisi yang sama terhadap 𝑙 jika keduanya
berada pada di H1 atau H2. Dan dikatakan berada pada sisi yang
berlawanan terhadap 𝑙 jika salah satu titik berada di H1 dan titik yang lain
berada di H2. Jika A ∈H1 , kita katakan H1 adalah sisi dari 𝑙yang
mengandung A. ∎
Untuk lebih memahami mengenai Definisi 2.6.3, perhatikan gambar
berikut :
𝑙
A B
B A
𝑙
Gambar 2.21 mengilustrasikan titik A dan titik B yang terletak pada sisi
yang saling berlawanan terhadap garis 𝑙, dalam bidang Euclid.
Gambar 2.22 mengilustrasikan titik A dan titik B yang terletak pada sisi
yang sama terhadap garis 𝑙, dalam bidang Poincare.
2.7 Geometri Pash
Sekarang kita akan membahas mengenai sistem geometri baru
yaitu geometri Pash. Geometri Pash ini merupakan sistem geometri yang
memenuhi Postulat Pash. Sebelum kita membahas lebih jauh mengenai
geometri Pash, terlebih dahulu akan diberikan definisi mengenai Postulat
Pash.
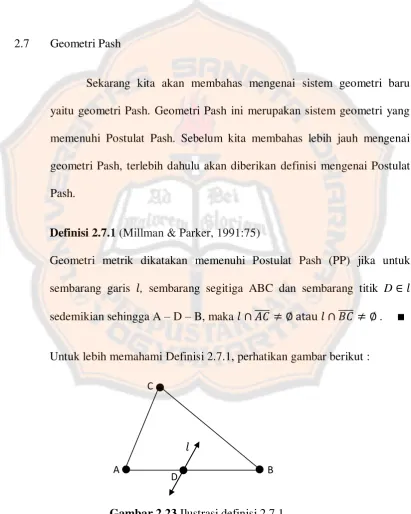
Definisi 2.7.1 (Millman & Parker, 1991:75)
Geometri metrik dikatakan memenuhi Postulat Pash (PP) jika untuk
sembarang garis 𝑙, sembarang segitiga ABC dan sembarang titik D∈ 𝑙
sedemikian sehingga A – D – B, maka 𝑙 ∩ 𝐴𝐶 ≠ ∅ atau 𝑙 ∩ 𝐵𝐶 ≠ ∅ . ∎
Untuk lebih memahami Definisi 2.7.1, perhatikan gambar berikut :
A
D C
B
𝑙
Gambar 2.23 menunjukkan sebuah segitiga ABC, dimana terdapat titik
𝐷 ∈ 𝐴𝐵 , sedemikian sehingga untuk sembarang garis 𝑙 yang melewati D,
maka garis 𝑙 tersebut akan memotong segmen garis 𝐴𝐶 atau 𝐵𝐶 .
Berikut ini akan diberikan Teorema mengenai hubungan antara Postulat
Pash dengan Aksioma Pembagian Bidang, yang sudah dibahas pada bagian
2.6.
Teorema 2.7.1 (Millman & Parker, 1991:75)
(Teorema Pash) Jika geometri metrik memenuhi APB, maka juga
memenuhi PP.
Bukti :
Diketahui ∆𝐴𝐵𝐶 dan sembarang garis 𝑙. Asumsikan ada sebuah titik 𝐷 ∈ 𝑙
dengan 𝐴 − 𝐷 − 𝐵. Kita akan menunjukkan bahwa 𝑙 ∩ 𝐴𝐶 ≠ ∅ atau
𝑙 ∩ 𝐵𝐶 ≠ ∅. Perhatikan Gambar 2.23.
Sekarang andaikan 𝑙 ∩ 𝐴𝐶 =∅. Kita akan menunjukkan bahwa 𝑙 ∩
𝐵𝐶 ≠ ∅.
𝑙 ≠ 𝐴𝐵 karena 𝐴 ∈ 𝐴𝐶 ∩ 𝐴𝐵 . Jadi A dan B tidak berada pada garis 𝑙 dan
berada pada sisi yang saling berlawanan dari garis 𝑙 karena 𝐴𝐵 ∩ 𝑙=
𝐷 ≠ ∅. A dan C terletak pada sisi yang sama dari garis 𝑙 karena 𝐴𝐶 ∩
𝑙= ∅. Oleh karena itu, B dan C berada pada sisi yang saling berlawanan
dari garis 𝑙 sehingga 𝑙 ∩ 𝐵𝐶 ≠ ∅.
Teorema 2.7.1 mengatakan jika geometri metrik memenuhi Aksioma
Pembagian Bidang, maka geometri tersebut pasti memenuhi Postulat Pash.
Dari Definisi 2.7.1 dan Teorema 2.7.1, kita dapat merumuskan sebuah
sistem geometri baru yang merupakan himpunan bagian dari geometri
metrik dan memenuhi Aksioma Pembagian Bidang. Sistem geometri
tersebut selanjutnya dinamakan Geometri Pash, seperti didefinisikan pada
Definisi 2.7.2 berikut.
Definisi 2.7.2 (Millman & Parker, 1991:76)
Geometri Pash adalah geometri metrik yang memenuhi APB. ∎
Definisi 2.7.2 mendefinisikan sistem geometri Pash, yaitu geometri Metrik
yang memenuhi APB.
Selanjutnya, akan dibahas mengenai interior dari segmen garis, sinar garis,
dan sudut. Konsep interior ini akan berperan penting dalam pembahasan
Teorema Crossbar.
Definisi 2.7.3 (Millman & Parker, 1991:82)
Interior dari sinar garis AB dalam geometri metrik adalah himpunan
int AB = AB − A .
Interior dari segmen garis AB dalam geometri metrik adalah himpunan
Definisi 2.7.3 mengatakan bahwa interior dari sebuah sinar garis adalah
himpunan titik-titik yang menyusun sinar garis tersebut, kecuali titik asal
nya. Sedangkan interior dari sebuah segmen garis adalah himpunan
titik-titik yang menyusun segmen garis tersebut, kecuali dua titik-titik ujungnya.
Definisi 2.7.4 (Millman & Parker, 1991:83)
Interior ∠ABC (ditulis int(∠ABC) adalah perpotongan sisi AB yang
memuat C dengan sisi BC yang memuat A. ∎
Untuk lebih memahami mengenai interior sebuah sudut, perhatikan
gambar berikut :
Gambar 2.24 merupakan ilustrasi Definisi 2.7.4. Gambar tersebut
menunjukkan interior dari ∠𝐴𝐵𝐶, yaitu bagian yang diarsir. Bagian yang
diarsir tersebut merupakan irisan antara sisi AB yang memuat C dengan
sisi BC yang memuat A.
Selanjutnya, kita akan membahas mengenai Teorema Crossbar. Ide dari
Teorema Crossbar ini sebenarnya hampir mirip dengan Postulat Pash.
A
C B
Teorema 2.7.2 (Millman & Parker, 1991:84)
(Teorema Crossbar) Dalam geometri Pash, jika P ∈int(∠ABC) maka BP
memotong AC di sebuah titik F dengan A – F – C .
Agar lebih memahami Teorema Crossbar, perhatikan gambar berikut :
Bukti :
Kita andaikan pernyataan tersebut salah maka 𝐵𝑃 memotong 𝐴𝐶 disebuah
tititk 𝐹 dengan 𝐹 − 𝐴 − 𝐶 atau 𝐴 − 𝐶 − 𝐹.
Sebelumnya perlu diingat bahwa 𝑃 ∈ 𝑖𝑛𝑡(∠𝐴𝐵𝐶) . Artinya, 𝑃 dan 𝐴
terletak pada sisi yang sama dari 𝐵𝐶 demikian juga 𝑃 dan 𝐶 terletak pada
sisi yang sama dari 𝐵𝐴 .
Kita andaikan 𝐵𝑃 memotong 𝐴𝐶 di 𝐹 dan 𝐹 − 𝐴 − 𝐶, sehingga 𝐴 dan 𝐶
terletak pada sisi yang sama dari 𝐵𝑃 . Akibatnya, 𝑃 dan 𝐶 terletak pada sisi
yang saling berlawanan terhadap garis 𝐵𝐴 atau dengan kata lain, 𝑃 ∉
𝑖𝑛𝑡(∠𝐴𝐵𝐶). Hal ini kontradiksi dengan kenyataan bahwa 𝑃 ∈ 𝑖𝑛𝑡(∠𝐴𝐵𝐶)
Sekarang kita andaikan 𝐵𝑃 memotong 𝐴𝐶 di 𝐹 dan 𝐴 − 𝐶 − 𝐹, sehingga 𝐴
dan 𝐶 terletak pada sisi yang sama dari 𝐵𝑃 . Akibatnya, 𝑃 dan 𝐴 terletak
pada sisi yang saling berlawanan terhadap garis 𝐵𝐶 atau dengan kata lain,
C
Gambar 2.25 Ilustrasi Teorema Crossbar
A
F
B
𝑃 ∉ 𝑖𝑛𝑡(∠𝐴𝐵𝐶). Hal ini kontradiksi dengan kenyataan bahwa 𝑃 ∈
𝑖𝑛𝑡(∠𝐴𝐵𝐶).
Jadi, pengandaian salah dan yang benar adalah 𝐵𝑃 memotong 𝐴𝐶 di
sebuah titik F dengan A – F – C □
Gambar 2.25 mengilustrasikan Teorema Crossbar. Teorema ini
mengatakan, untuk sembarang titik P ∈ 𝑖𝑛𝑡(∠𝐴𝐵𝐶), maka sinar garis 𝐵𝑃
kan memotong segmen garis 𝐴𝐶 pada sebuah titik F, dimana F terletak di
antara A dan C. Atau dengan kata lain, titik F ∈ 𝐴𝐶 .
2.8 Geometri Protraktor
Setelah kita membahas mengenai Geometri Pash, sekarang kita
akan membahas mengenai sistem geometri lain yang bernama Geometri
Protraktor. Geometri Protraktor ini merupakan himpunan bagian dari
Geometri Pash. Geometri Protraktor adalah Geometri Pash yang
mempunyai ukuran sudut. Sebelum kita membahas Geometri Protraktor,
terlebih dahulu akan diberikan definisi mengenai ukuran sudut.
Definisi 2.8.1 (Millman & Parker, 1991:90)
Misalkan r0 bilangan real positif. Dalam geometri Pash, ukuran sudut
(atau Protraktor) adalah fungsi m dari himpunan sudut-sudut 𝒜 ke
himpunan bilangan real sedemikian sehingga berlaku
2. Jika BC pada rusuk dari bidang paruh H1 dan θ bilangan real positif
dengan 0 < θ< r0 maka terdapat sinar garis tunggal BA dengan A∈H1
dan m ∠ABC =θ
3. Jika D∈ int(∠ABC) maka m ∠ABD + m ∠DBC = m ∠ABC .
∎
Definisi 2.8.1 membahas mengenai ukuran sudut dalam Geometri Pash.
Aksioma pertama mengatakan bahwa ukuran suatu sudut berada dalam
suatu rentang tertentu. Nilai minimalnya adalah 0, sedangkan nilai
maksimalnya adalah suatu bilangan real positif tertentu.
Aksioma kedua berbicara mengenai konstruksi sudut. Jika 𝐵𝐶 terletak
pada rusuk bidang paruh 𝐻1 (artinya, sinar garis 𝐵𝐶 terletak pada garis
yang memisahkan bidang 𝐻1 dan 𝐻2), maka terdapat sinar garis tunggal
𝐵𝐴
dengan 𝐴 ∈ 𝐻1, dan besar sudut yang terbentuk antara dua sinar garis
tersebut adalah bilangan real positif tertentu. Untuk lebih memahami
aksioma 2 pada Definisi 2.8.1, perhatikan Gambar 2.26.
Aksioma ketiga berbicara tentang penjumlahan sudut. Jika ada dua buah
sudut yang memiliki satu sinar garis yang sama, maka kedua sudut tersebut
dapat membentuk sebuah sudut baru yang ukurannya merupakan jumlahan
dari ukuran dua sudut tersebut. Untuk lebih memahaminya, perhatikan
Gambar 2.26 mengilustrasikan aksioma kedua dari Definisi 2.8.1.
Sedangkan Gambar 2.27 mengilustrasikan aksioma ketiga dari Definisi
2.8.1.
Setelah membahas mengenai ukuran sudut, sekarang kita akan membahas
mengenai Geometri Protraktor.
Definisi 2.8.2 (Millman & Parker, 1991:91)
Geometri protraktor { S ,ℒ, d, m } adalah geometri Pash { S ,ℒ, d }
dengan ukuran sudut m. ∎
Definisi 2.8.2 berbicara mengenai definisi Geometri Protraktor, yaitu
Geometri Pash dengan ukuran sudut 𝑚.
Definisi 2.8.3 (Millman & Parker, 1991:108)
Dalam geometri protraktor { S ,ℒ, d, m } dua sudut ∠ABC dan ∠DEF
dikatakan kongruen (∠ABC ≃ ∠DEF) jika m(∠ABC) = m(∠DEF).
∎
Definisi 2.8.3 berbicara mengenai 2 sudut yang kongruen. Dua sudut
dikatakan kongruen jika ukuran ke dua sudut tersebut sama. Konsep
kekongruenan sudut ini penting untuk membahas Teorema konstruksi
Selanjutnya, akan dibahas mengenai konsep ukuran sudut dalam bidang
Euclides dan bidang Poincare.
Definisi 2.8.3 (Millman & Parker, 1991:93)
Pada bidang Euclid, ukuran sudut Euclid ∠ABC adalah
𝑚 ∠𝐴𝐵𝐶 = 𝑐𝑜𝑠−1 𝐴−𝐵 𝐴−𝐵,𝐶−𝐵
. 𝐶−𝐵 ∎
Untuk ukuran sudut dalam bidang Poincare, kita menggunakan bantuan
tangen Euclid. Berikut akan diberikan definisi mengenai tangen Euclid,
pada garis dalam bidang Poincare.
Definisi 2.8.4 (Millman & Parker, 1991:94)
Jika BA adalah sinar garis pada bidang Poincare dengan A = xA, yA dan
B = xB, yB maka tangen Euclid untuk BA di B adalah :
TBA =
0, yA−yB , jika AB adalah garis tipe I, aL yB, c−xB , jika AB adalah garis tipe II, cLr, xB < xA − yB, c−xB , jika AB adalah garis tipe II, cLr, xB > xA
Tangen sinar garis Euclid untuk BA adalah sinar garis Euclid BA′ dengan
A′ = B + TBA. ∎
Definisi 2.8.5 (Millman & Parker, 1991:95)
Ukuran sudut Poincare ∠ABC dalam ℍ adalah
mH ∠ABC = mE ∠A′BC′ = cos−1 TBA,TBC TBA . TBC
dengan A‟= B + TBA dan C‟ = B + TBC dan mE ∠A′BC′ adalah ukuran
Gambar 2.28 merupakan ilustrasi dari sudut dalam bidang Poincare.
Selanjutnya, akan diberikan Teorema mengenai konstruksi sudut.
Teorema 2.8.1 (Millman & Parker, 1991:108)
(Teorema Konstruksi Sudut ) Dalam geometri Protraktor, jika ada ∠ABC
dan sebuah sinar garis ED yang terletak di tepi bidang paruh H1, maka ada
sebuah sinar garis EF dengan F∈H1, dan ∠ABC ≃ ∠DEF.
Bukti :
Kita andaikan pernyataan tersebut salah maka untuk setiap sinar garis 𝐸𝐹 ,
∠𝐴𝐵𝐶 ≄ ∠𝐷𝐸𝐹.
Misalkan 𝑚 ∠𝐴𝐵𝐶 =𝜃 maka menurut Definisi 2.8.1, terdapat sebuah
sinar garis 𝐸𝐹 sehingga 𝑚 ∠𝐷𝐸𝐹 = 𝜃. Akibatnya, 𝑚 ∠𝐴𝐵𝐶 =
𝑚 ∠𝐷𝐸𝐹 =𝜃 sehingga ∠𝐴𝐵𝐶 ≃ ∠𝐷𝐸𝐹. Hal ini kontradiksi dengan
pernyataan bahwa ∠𝐴𝐵𝐶 ≄ ∠𝐷𝐸𝐹. Oleh karena itu, pengandaian salah.
Jadi terbukti bahwa terdapat sebuah sinar garis 𝐸𝐹 dengan 𝐹 ∈ 𝐻1, dan
∠𝐴𝐵𝐶 ≃ ∠𝐷𝐸𝐹
Gambar 2. 28
B
𝑇𝐵𝐴
𝑇𝐵𝐶
A’
Atau, kita misalkan 𝑚 ∠𝐴𝐵𝐶 =𝜃. Dengan menggunakan Definisi 2.8.1,
Teorema ini langsung terbukti . □
Teorema 2.8.1 membahas mengenai Teorema konstruksi sudut. Teorema
ini mirip dengan definisi ukuran sudut pada Definisi 2.8.1, hanya saja
ukuran sudut yang terbentuk bukan bilangan bilangan real tertentu, tetapi
harus kongruen dengan sudut tertentu.
Untuk lebih memahami Teorema 2.8.1, perhatikan gambar berikut :
Selanjutnya, akan diberikan Teorema-Teorema mengenai penjumlahan
sudut dan pengurangan sudut.
Teorema 2.8.2 (Millman & Parker, 1991:108)
(Teorema Penjumlahan Sudut ) Dalam geometri Protraktor, jika D∈
int (∠ABC), S∈int (∠PQR), ∠ABD ≃ ∠PQS, dan ∠DBC ≃ ∠SQR, maka
∠ABC ≃ ∠PQR.
Bukti :
Menurut aksioma ketiga dari definisi sudut, jika D∈int(∠ABC) maka
m ∠ABD + m ∠DBC = m ∠ABC .
Sehingga, jika S∈ int(∠PQR) maka
A
C
𝜃
B
F
D
𝜃
E