BAB III
PERANCANGAN DAN PEMBUATAN ALAT
3.1 Analisis
Dalam tahap analisis ini terdapat beberapa tahapan penganalisisan kebutuhan, yaitu :
1. Analisis kebutuhan sistem 2. Analisis spesifikasi sistem 3. Analisis komponen
Tujuan dari ketiga analisis tersebut ialah sebagai kebutuhan informasi dalam perancangan dan pembuatan robot pengangkut pallet.
3.1.1 AnalisisKebutuhan Sistem
Robot pengangkut palet dengan pengkontrol wireless adalah sejenis robot yang bekerja dengan cara dioperaikan oleh melalui kontrol wireless, yang berfungsi untuk mengangkut palet dari suatu tempat asal ke tempat tujuan lainnya. Oleh karena itu, diperlukan analisa kebutuhan sistem agar alat yang dibuat dapat memenuhi kebutuhan robot pengangkut palet dengan pengkontrol wireless yang dalam penelitian ini contohnya digunakan dalam industri, yaitu:
1. Mengantarkan barang dan kembali ke tempat awalnya (berjalan 2 arah).
2. Berjalan dengan dioperasikan oleh operator menggunakan wireless. 3. Robot mampu bergerak secara bebas sesuai instruksi operator.
4. Robot hanya melakukan instruksi yang sederhana namun harus dikerjakan dengan cepat.
3.1.2 Spesifikasi Sistem
1. Mengolah masukan dari Output wireless sehingga dapat menginstruksikan PLC-Mikro agar mengeluarkan output agar terjadi aksi.
Untuk mengolah masukan dari output wireless maka diperlukan
software. Dalam hal ini software dibutuhkan untuk mengolah masukan dari sensor yang berupa biner 0 (mendapat tegangan 0V) dan 1 (mendapat tegangan 5V) agar dapat menghasilkan keputusan bagi pergerakan robot. Keputusan diteruskan sebagai suatu informasi ke PLC-Mikro, dan kemudian
PLC-Mikro menginstruksikan ke driver motor DC sehingga motor DC bekerja sesuai dengan respon yang diberikan oleh wireless.
2. Mengaktifkan 2 buah motor DC penggerak robot agar robot dapat bergerak maju, mundur dan berhenti
Dalam mengaktifkan 2 buah motor DC penggerak robot tidak hanya dibutuhkan tegangan masukan terhadap motor saja, akan tetapi dibutuhkan yang namanya software. Hal ini karena jika tidak ada software maka motor DC akan berjalan terus menerus. Jadi software berfungsi untuk memberikan keputusan kepada driver motor DC sehingga motor DC penggerak robot sehingga robot dapat bergerak maju, mundur dan berhenti sesuai dengan instruksi dari software.
3. Mengaktifkan PLC-Mikro menggunakan wireless sebagai pengaman.
Dalam keadaan awal robot mati, kemudian kita ingin menjalankan robot. Kita harus menekan salah satu tombol wireless utnuk mengaktifkan
PLC-Mikro terlebih dahulu. Jika tombol wireless tidak ditekan, maka PLC-Mikro tidak bisa aktif sehingga robot tidak akan bisa beroperasi.
3.1.3 Analisis Komponen
III.1.3.1 Pemilihan Komponen Pengolah Data.
Dalam pembuatan robot pengangkut palet dengan kontrol wireless ini, Komponen Pengolah Data yang digunakan adalah PLC-Mikro, karena :
1. PLC-Mikro relatif murah, sederhana dan mudah di buat.
2. PLC-Mikro mudah dikonfigurasikan dengan perangkat-perangkat lainnya.
3. Dari hasil software yang dibuat, ternyata tidak memerlukan mikrokontroler yang memorinya besar.
4. Robot tidak memerlukan I/O yang banyak.
III.1.3.2 Pemilihan Driver Motor
Ada beberapa macam driver motor yang bisa dibuat, namun driver motor yang paling sering digunakan adalah tipe H-Bridge. Driver motor tipe
H-Bridge ini terbilang tidak terlalu rumit , karena prinsip kerjanya yang seperti saklar pemutus saja. H-Bridge sendiri terdapat 2 jenis,yaitu:
1. H-Bridge menggunakan Transistor
H-Bridge jenis ini menggunakan transistor sebagai saklar pemutusnya. Tipe ini agak sulit digunakan karena harus menghitung dahulu arus basis yang masuk ke transistor tersebut sehingga output arus dari transistor tersebut cukup untuk menggerakkan motor DC. Selain itu arus yang mampu diberikan ke motor DC relatif lebih kecil ketimbang H-Bridge relay.
2. H-Bridge menggunakan Relay
harga relay yang tidak murah menjadi pertimbangan tersendiri untuk merancang H-Bridge jenis ini.
Setelah dianalisis dan dipertimbangkan dari sisi kemudahan, fleksibilitas serta yang sesuai dengan spesifikasi yang dibutuhkan oleh robot maka maka driver motor yang kami gunakan adalah driver motor H-Bridge. Menggunakan Relay
III.1.3.3 Pemilihan Bahasa Pemrograman
Dalam pembuatan software ada beberapa alternatif bahasa pemrograman yang dapat digunakan, yaitu :
1. Bahasa Ladder
2. Bahasa STL (Structured Text Language)
Masing-masing bahasa pemrograman diatas memiliki kelebihan dan kekurangan.
1. Bahasa Ladder
Kelebihan pemrograman menggunakan bahasa Ladder ialah salah satu
software yang paling mudah dalam pemrogramannya dan sangat sederhana. Sedangkan kekurangannya ialah struktur pemrograman tidak bisa diubah dan harus mengikuti aturan yang telah ditetapkan oleh software ladder, sehingga sangat menyulitkan programmer untuk menyederhanakan suatu instruksi.
2. Bahasa STL (Structured Text Language)
Kelebihan pemrograman menggunakan bahasa STL ialah tidak banyak menghabiskan kapasitas memori. Sedangkan kekurangannya ialah dalam penlisan code programnya akan panjang.
3.2 Desain
Pada tahap ini terdapat tiga macam pendisainan, yaitu :
1. Desain PLC-Mikro 2. Desain Driver Motor DC
3. Desain Software Ladder Diagram
Tujuan dari tahap pendisainan ini ialah membuat software robot yang sesuai dengan kebutuhan dari fungsional robot tersebut.
3.2.1 Desain PLC-Mikro
Pada PLC mikro terdiri dari beberapa bagian penting agar dapat bekerja sesuai dengan yang kita harapkan, bagian bagian ini yang akan kita sebut sebagai modul (part) yang akan mendukung agar PLC mikro ini dapat bekerja, berikut gambar bagan kerjanya.
A. Modul Catu Daya B. Modul Mikrokontroller
Berikut lebih rinci dari Modul-modul yang digunakan :
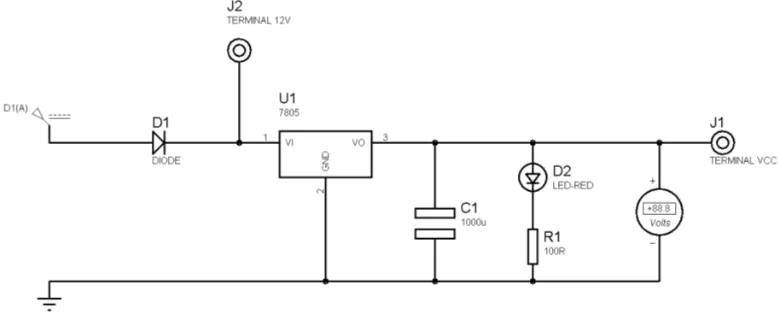
III.2.1.1 Modul Catu Daya
Sumber tegangan yang digunakan adalah baterai kering/aki. Sehingga tidak diperlukan dioda bridge untuk penyearah tegangan. Tetapi karena catu daya yang dibutuhkan rangkainan adalah 5 Vdc untuk mikrokontroler oleh karena itu digunakan ic regulator 7805 serta 12Vdc untuk input-output. - 1 Resistor 330ohm - 1 Saklar Kecil 3 pin - 1 Konektor sisir isi 3 - 1 Kabel AC bunting - 1 Kabel kecil secukupnya
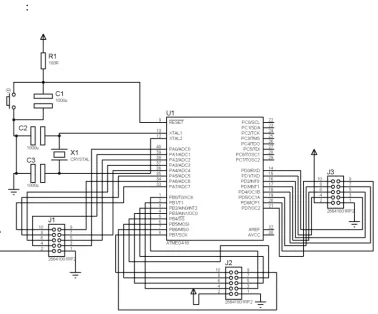
Pada modul mikrokontroler terdiri atas sebuah ATMega16 dan komponen pelengkap pendukung mikrokontroler ini terminal dan jumlah total kaki input output yang dapat digunakan yaitu 24 pin :
Gambar 3.2 Modul Mikrokontroler
Komponen modul mikrokontroler :
Bentuk dari PLC-Mikro yang telah dirangkai seperti pada gambar 3.3.
Gambar 3.3 PLC-Mikro
Setelah PCB dan komponen dirangkai dengan baik maka kami memberikan pelindung(cover) agar PLC-Mikro terlindungi dari interferensi atau gangguan dari luar.
Gambar 3.4 PLC-Mikro yang telah diberi cover
3.2.2 Desain Driver Motor DC
menjalankan motor adalah salah satu hal yang harus dipertimbangkan ketika mendesain driver motor.
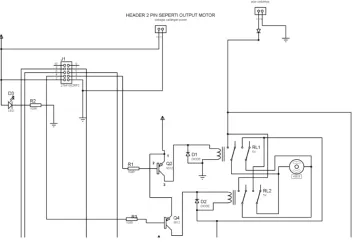
Seperti yang telah dijelaskan diatas bahwa kami memilih menggunakan H-Bridge relay sebagai driver motor dikarenakan fleksibilitasnya dalam mengeluarkan arus yang dibutuhkan untuk motor DC. Berikut adalah skematik dari driver H-Bridge relay yang kami buat. Driver
ini akan menggerakkan 3 motor DC yang ada pada robot kami.
.
Gambar 3.5 Skematik Driver Motor H-Bridge Relay
Komponen:
1 Terminal pin 40 1 LED merah 1 Resistor 100 ohm
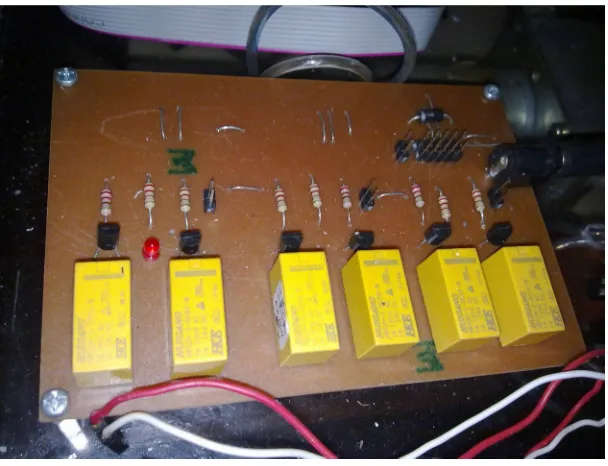
Setelah membuat skematik kemudian kami membuat PCB untuk
driver motor ini. Kesulitan yang kami hadapi dalam pembuatan PCB ini adalah kami harus membuat pengerjaan PCB yang rapi namun ukuran PCB tidak boleh terlalu besar.
Gambar 3.6 Driver Motor Setelah Dirangkai
Untuk menghubungkan driver motor dengan PLC-Mikro , kami menggunakan kabel data yang dipasang header. Kemudian header kabel data dicolokkan ke terminal 10 pin yang telah dipasang pada PCB driver motor. Sedangkan untuk output ke motor, kami menggunakan terminal 2 pin, yang nantinya akan disambung ke kabel motor DC menggunakan black housing.
Dilihat dari kebutuhan sistem yang ada, maka dirancanglah suatu
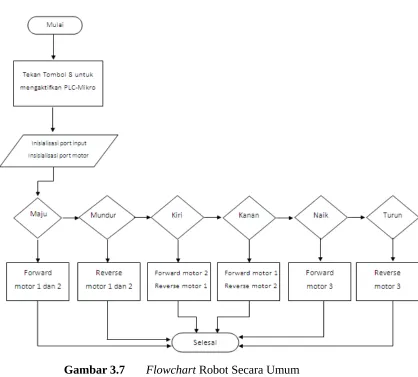
software yang dapat memenuhi kebutuhan dari sistem tersebut. Mengapa perlu dirancang suatu software, sebenarnya bisa juga menggunakan peta gerbang logika untuk memenuhi kebutuhan sistem, akan tetapi terdapat kelemahannya yaitu robot tidak dapat bergerak secara halus. Sedangkan apabila menggunakan software maka robot dapat bergerak lebih halus. Halus dan tidaknya gerak robot diatur oleh delay robot tersebut. Jadi, dapat disimipulkan bahwa salah satu kelebihan dari software ialah dapat dibuat
delay yang dapat diatur. Software yang dirancang direpresentasikan dalam bentuk flowchart terlebih dahulu. Berikut ini adalah flowchart robot pengangkut palet dengan kontrol wireless secara umum.
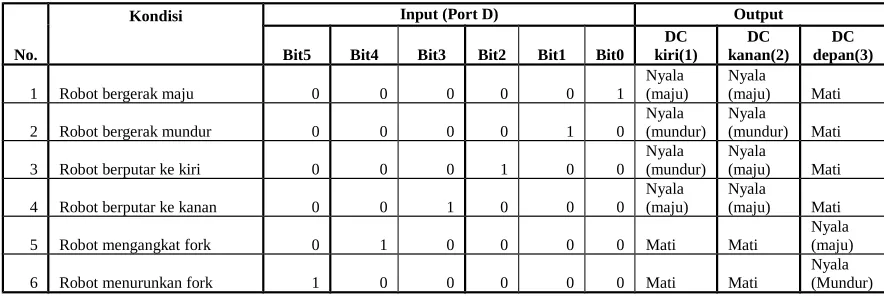
Flowchart yang dibuat berpatokan terhadap tabel kebenaran (table logika) yang telah dibuat. Hal ini dikarenakan fungsi dari table kebenaran itu ialah menujukan instruksi apa saja yang akan diimplementasikan pada robot pengangkut palet dengan kontrol wireless ini, sehingga robot dapat bekerja sesuai dengan alur-alur pemrograman. Tabel kebenaran yang dibuat untuk robot pengangkut palet dengan kontrol wireless ini dapat dilihat seperti dibawah ini :
Tabel 3.1 Tabel kebenaran software robot.
No.
Kondisi Input (Port D) Output
Bit5 Bit4 Bit3 Bit2 Bit1 Bit0 kiri(1)DC kanan(2)DC depan(3)DC
1 Robot bergerak maju 0 0 0 0 0 1 Nyala (maju) Nyala (maju) Mati keluaran (output) berupa pergerakan motor DC penggerak robot dan motor DC Pengangkat.
adalah software Ladder. Untuk Software Ladder yang kami gunakan adalah LD-Micro.
Langkah-langkah dalam pembuatan software ini adalah: Buka Software LD-Micro
Kemudian Pilih File – New
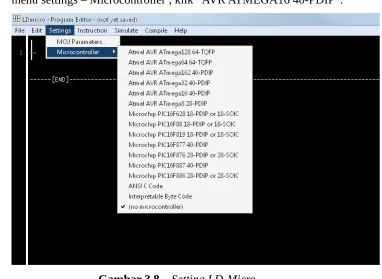
Setelah itu akan terlihat worksheet yang kosong, kemudian pilih menu settings – Microcontroller , klik “AVR ATMEGA16 40-PDIP”.
Gambar 3.8 Setting LD-Micro
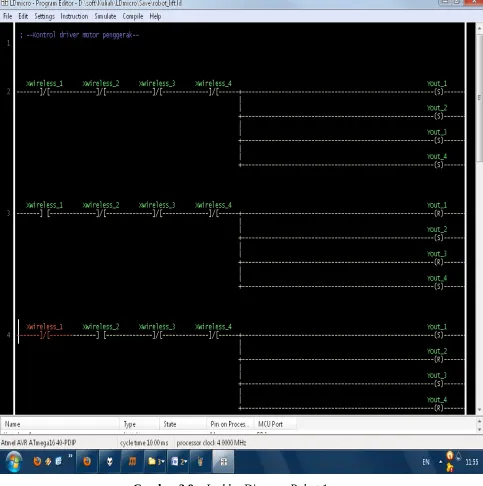
Setelah itu masukkan instruksi-instruksi yang dibutuhkan lewat menu instructions.
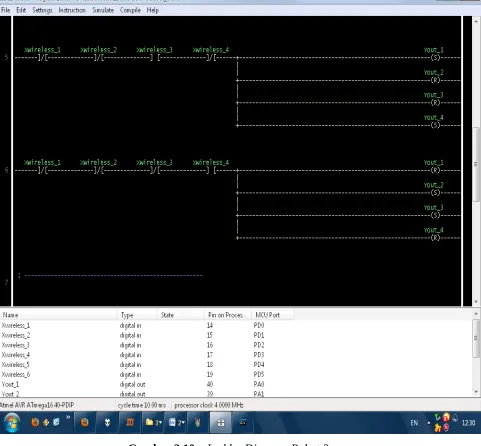
Gambar 3.11 Ladder Diagram Robot 3
Setelah membuat Ladder seperti diatas , kemudian atur koil-koil dan output pada ladder sesuai dengan pin/port yang dibutuhkan. Caranya dengan mengklik 2 kali nama input/output yang berada di window bawah LD-Micro.
Gambar 3.12 Setting Pin LD-Micro
Gambar 3.13 Simulation LD-Micro