4 BAB II
TINJAUAN PUSTAKA
2.1 Tanah Longsor
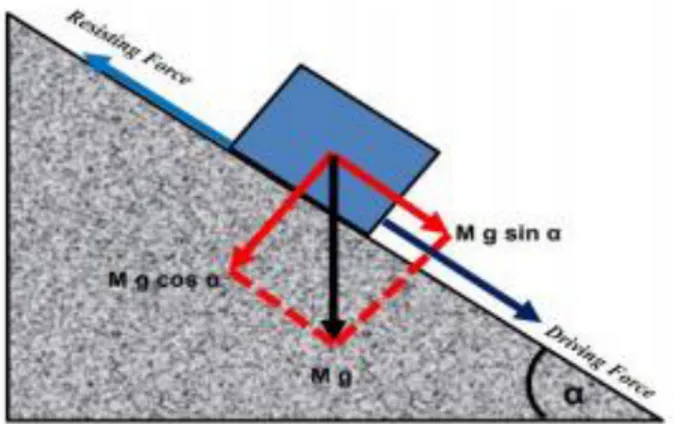
Tanah longsor merupakan pergerakan lereng batuan atau tanah atau keduanya yang terjadi diatas permukaan tanah yang dipengaruhi oleh gravitasi [26] dan bentuk lahan yang dihasilkan dari pergerakannya. Prinsip dasar tanah longsor yaitu apabila gaya yang mendorong gerakan tanah lebih besar dari pada gaya yang menahan pergerakan dari tanah tersebut [27]. Yang meliputi gaya pendorong adalah kemiringan dari lereng, banyaknya air yang terkandung dalam lereng, dan berat jenis dari tanah. Sedangkan gaya penahan meliputi batuan kuat, dan tingkat kepadatan tanah [28].
Gambar 2.1. merupakan gambar dari gaya-gaya yang bekerja pada tanah longsor. Gravitasi dalam hal ini bisa berpengaruh sebagai gaya pendorong dikarenakan lereng yang curam sehingga gravitasi pada lereng tersebut semakin besar.
Gambar 2.1. Gaya yang bekerja pada lereng [27].
Selain adanya gaya yang bekerja pada tanah longsor. Tanah longsor juga mempunyai beberapa tipe. Tipe tanah longsor berdasarkan pergerakannya dibagi menjadi lima tipe, yaitu: jatuhan, robohan, longsoran, aliran dan penyebaran [2].
5 2.1.1 Jatuhan
Merupakan terlepasnya tanah atau batu atau keduanya dari lereng yang curam yang disebabkan oleh pelapukan, aktivitas manusia atau getaran yang kuat, sehingga material yang jatuh mengenai lereng yang lebih rendah hingga medan yang datar. Gambar 2.1. merupakan contoh skematik terjadinya jatuhan pada lereng. Kejadian ini bisa terjadi pada lereng yang curam atau vertikal dengan berbagai variasi batuan dan blok tanah. Kecepatan terjadinya jatuhan bergantung pada kemiringan dari lereng. Dampak yang ditimbulkan dari jatuhan ini adalah rusaknya fasilitas umum dan adanya korban jiwa.
Gambar 2.2. Skematik jatuhan pada lereng [2].
2.1.2 Robohan
Merupakan tipe tanah longsor yang mendapatkan dorongan oleh gravitasi yang diberikan oleh material yang terletak diatas lereng. Robohan juga bisa terjadi karena pelapukan atau erosi sungai hal ini bisa dilihat pada Gambar 2.2. Robohan sering terjadi di tepian sungai yang curam dengan kecepatan geraknya bisa cepat atau lambat bergantung dari jarak tempuhnya.
6
Gambar 2.3. Skematik robohan pada lereng [2].
2.1.3 Longsoran
Longsoran adalah suatu gerak lereng kebawah dari permukaan yang mengalami suatu pergeseran. Longsoran bisa terjadi secara rotasi maupun secara translasi. Longsoran rotasi bisa dilihat pada Gambar 2.3. Longsoran rotasi terjadi karena curah hujan yang terjadi terus menerus sehingga mempengaruhi kelembaban pada tanah. Kemiringan yang diukur pada longsoran rotasi dimulai dari 20° sampai 40°.
Gambar 2.4. Skematik longsoran rotasi [2].
Sedangkan longsoran translasi bisa dilihat pada Gambar 2.4. Longsoran translasi merupakan kejadian tanah longsor yang sering terjadi disemua jenis lingkungan dan kondisi. Pemicu terjadinya longsoran translasi adalah curah hujan yang intens dan bisa juga disebabkan oleh gempa bumi. Dampak yang ditimbulkan adalah rusaknya bangunan atau bisa mengancam nyawa dan bisa membendung sungai dan menyebabkan banjir.
7
Gambar 2.5. Skematik longsoran translasi [2].
2.1.4 Penyebaran
Tanah longsor jenis penyebaran merupakan tipe tanah longsor yang terjadi pada lereng yang landai. Hal ini disebabkan oleh adanya guncangan gempa atau keadaan tanah yang berada di atas lereng yang tidak stabil. Gambar dari tipe longsoran penyebaran bisa dilihat pada Gambar 2.5. berikut ini.
Gambar 2.6. Skematik longsor tipe penyebaran [2].
2.1.5 Aliran
Merupakan salah satu tipe tanah longsor yang terjadi di lereng yang curam dan terjadi penggundulan hutan yang dikarenakan kebakaran hutan atau penebangan pohon secara liar. Batuan atau tanah dari lereng tersebut mengalami pengikisan atau bergerak lepas sehingga terjadi longsoran yang membawa material lanau atau pasir. Gambar dari skematik tipe longsor ini bisa dilihat pada Gambar 2.6. berikut ini.
8
Gambar 2.7. Skematik longsor aliran [2].
Selain tipe terjadinya tanah longsor juga terdapat faktor-faktor yang mempengaruhi terjadinya tanah longsor dan juga dampak yang diakibatkan karena terjadinya tanah longsor. Terdapat dua faktor utama yang mempengaruhi tanah longsor yaitu alam dan ulah manusia atau keduanya. Faktor-faktor tersebut antara lain hujan, lereng yang terjal, batuan yang kurang kokoh, tipe tatanan lahan, getaran, susut muka air danau/bendungan, terdapat beban tambahan, pengikisan/erosi, material tambahan yang ada pada tebing, bekas longsoran lama, penggundulan hutan, serta daerah pembuangan sampah [3]. Terdapat juga beberapa dampak yang diakibatkan karena terjadinya tanah longsor. Salah satu dampak terjadinya tanah longsor adalah rusaknya rumah warga, lahan pertanian, jalan terputus, dan warga yang mengalami luka-luka atau meninggal dunia. Untuk mengurangi dampak dan korban jiwa yang diakibatkan bencana tanah longsor, diperlukan suatu sistem yang dapat memberikan peringatan dini akan terjadinya tanah longsor. Oleh karena itu dilakukanlah penelitian ini dengan meninjau penelitian sebelumnya.
2.2 Tinjauan Penelitian
Penelitian yang berkaitan dengan instrumentasi pergerakan tanah meliputi beberapa penelitian, diantaranya penelitian yang dilakukan oleh Joko Priyanto (2015) yang menggunakan sensor LVDT (Linear Variabel Differential
Transformer) dan juga potensiometer yang terdapat disetiap area yang
9
mengalami pergeseran dengan menggunakan komunikasi GSM (Global System
for Mobile Communication). Sebagai EWS (Early Warning System) satu area
pantau terdiri dari satu lintasan dengan kesalahan dalam pembacaan sensor lebih kurang 0,02 mm dengan rentang pergeseran lebih dari 50 mm, sistem ini menentukan tingkat bahaya longsor hanya berdasarkan pergeseran tanah mencapai 50 mm dengan LVDT. Sistem yang digunakan dalam menentukan jarak pergeseran tanah adalah telemetri digital.
Sensor ultrasonik dan sensor infrared bisa digunakan sebagai sistem pendeteksi dini tanah longsor. Untuk melengkapi kerja dari kedua sensor juga ditambahkan modul radio frekuensi, atmega 328 dan juga GSM. Dalam penelitian ini sensor ultrasonik digunakan sebagai pendeteksi tanah longsor sedangkan sensor
infrared digunakan untuk memonitoring objek yang melintas dengan
menyampaikan informasi berupa SMS, autocall dan alarm. Penelitian ini dalakukan oleh Dandun Widhiantoro pada tahun 2016, dimana pembacaan dalam sensor ultrasonik ialah microsecond yang dirubah menjadi cm. Apabila pergeseran yang terdeteksi 8 cm akan terjadi autocall karena pergeseran tanah mengalami pergeseran yang signifikan, dengan tidak memperhatikan adanya objek yang melintasi infrared atau tidak sistem akan tetap mengirimkan
autocall.
Pada penelitian digunakan empat parameter untuk menentukan kondisi awal tanah longsor, dengan batas kemiringan yaitu 60°, batas kelembaban 20%, dan curah hujan lebih dari 65%, sedangkan fungsi getaran dalam penelitian hanya digunakan sebagai petunjuk ada atau tidaknya suatu getaran pada suatu objek yang berisikan pasir dengan variasi banyaknya kadar air yang akan dikirimkan melalui SMS. Pada penelitian digunakan beberapa sensor untuk memenuhi empat parameter diatas, diantaranya accelerometer sebagai pendeteksi getaran dan kemiringan, sensor kelembaban tanah, sensor hujan, dan sensor pergeseran tanah dengan potensiometer. Penelitian ini berhasil dilakukan oleh Fariz Setiadi pada tahun 2017.
Hasil dari penelitian, buzzer akan berbunyi ketika pergeseran lebih dari empat cm, tetapi data lokasi dari pergeseran tidak tertampil dengan besar sudut yang
10
diukur adalah 45°. Penelitian pendeteksi dini tanah longsor berbasis SMS dilakukan oleh Gita Okta (2019) dengan menggunakan SMS yang akan dikirimkan berupa kondisi siaga II dan siaga III beserta lokasi terjadinya tanah longsor. Penentu status siaga, waspada, atau bahaya pada penelitian ini mengacu pada penelitian lain. Sistem ini mampu mendeteksi pergeseran tanah dengan menggunakan sensor jarak VL53L00X dan mampu mengirimkan informasi peringatan dengan modul SIM800L.
Penelitian yang dilakukan oleh Kalisa, Ali Nurdin, dan M. Fadhli pada tahun 2019 memanfaatkan teknologi berbasis IoT untuk mendeteksi terjadinya tanah longsor secara dini. Penelitian ini menggunakan sensor ultrasonik, soil moisture
sensor, arduino uno, dan ESP8266. Pergeseran tanah yang terdeteksi dalam
sistem ialah kurang dari 10 cm sampai lebih dari 15 cm dengan kelembabannya 50% - 65%. Saat pembacaan sensor lebih dari 15 cm buzzer akan berbunyi dan menandakan bahwa adanya pergeseran yang bisa memicu terjadinya tanah longsor namun waktu pergeseran tidak ditentukan.
Penelitian menggunakan sensor curah hujan, dan wire extensonmeter yang didalamnya terdapat potensiometer dan pulley dapat mengidentifikasi terjadinya tanah longsor secara dini. Dengan menggunakan jaringan LoRa (Long Range) sebagai media dalam mengirim data dengan jarak 500-700 m tanpa adanya suatu hambatan data dapat terkirim. Jika ada suatu hambatan maka jarak pengukuran dengan jaringan LoRa kurang dari jarak tanpa hambatan dan mengalami noise yang tinggi. Penelitian dengan pengiriman data menggunakan LoRa ini dikembangkan oleh Badrut Tamam pada tahun 2020.
Pada penelitian Irvan Akbar (2020) dijelaskan bahwa pergeseran dan kelembaban tanah lebih dari 51% bisa menimbulkan longsor. Tanah pada penelitian ini akan mengalami pergeseran ketika tanah mendapatkan dorongan sehingga sensor bisa membaca pergeserannya. Level aman dari kelembaban tanah adalah 16,32%. Dalam penelitiannya Irvan Akbar menggunakan sensor MPU-6050, soil moisture sensor dan SIM800L sebagai GSM. Dengan notifikasi yang dikeluarkan didasarkan pada salah satu parameternya.
11
Penelitian yang dilakukan oleh Febyano (2020) juga sudah terkoneksi dengan internet dan konversi pembacaan dari pergeseran tanahnya sudah mampu membaca satuan milimeter dengan menggunakan satu parameter pergeseran yaitu intensitas cahaya. Dimana penelitian ini menggunakan sensor cahaya BH1750, LED, dan NodeMCU.
Berdasarkan beberapa penelitian yang telah dikembangkan, sistem yang akan saya buat dalam penelitian ini akan mengembangkan sistem-sistem yang sudah ada. Sistem yang akan saya buat ini akan memonitoring terjadinya tanah longsor dari berbagai aspek, yaitu jarak pergeseran dengan HC-SR04 dan IR, kemiringan tanah dengan accelerometer MPU-6050, kelembaban tanah dengan
Soil Moisture Sensor dan pencacah waktu dengan RTC. Agar data yang terkirim
bisa tercacat secara realtime, data-data ini akan dikirimkan ke website dan akan memberikan notifikasi pada pemilik akun website agar bisa memonitoring secara dini.
2.3 Tinjauan Komponen Penelitian
2.3.1 Arduino IDE (Integrated Development Environment)
Arduino IDE merupakan suatu perangkat lunak yang biasa digunakan dalam melakukan pengaturan terhadap suatu proyek dengan menggunakan suatu mikrokontroler. Pada Arduino IDE terdapat suatu serial yang berfungsi sebagai usart untuk memonitoring program apakah program yang kita buat sudah berhasil terkirim ke mikrokontrolernya atau belum.
Arduino IDE bersifat open-source yang mana apabila tidak ada library sensor yang diinginkan, pengguna bisa menambahkan library sendiri dalam perangkat Arduino IDE tersebut.
Situs resmi yang bisa dikunjungi untuk mendapatkan software Arduino IDE adalah https://www.arduino.cc/en/main/software. Ada beberapa sistem yang mendukung operasi jalannya software Arduino IDE ini diantaranya adalah Windows, MAC, dan LINUX [12].
12
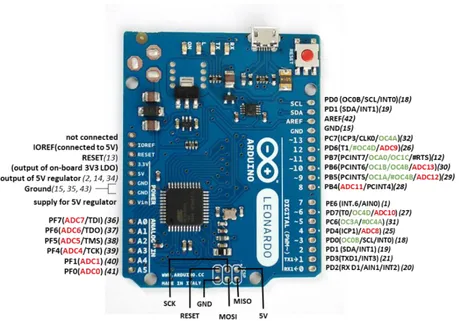
Arduino Leonardo merupakan suatu sistem untuk mengendalikan atau memonitoring suatu sensor yang dapat diprogram pada Arduino IDE, dan didasarkan pada board ATmega32u4. Gambar Arduino Leonardo bisa dilihat pada Gambar 2.7. Gambar ini menunjukan Arduino Leonardo bisa terkoneksi dengan mikro USB (Universal Serial Bus) yang mempunyai tujuh pin PWM (Pulse Width Modulation) output, 12 pin analog input dan 16 MHz osilator kristal. Arduino Leonardo juga dilengkapi dengan power
jack, ICSP Header, dan reset button. Untuk mengaktifkan Arduino
Leonardo ini bisa dikoneksikan dengan laptop menggunakan USB atau dengan powerbank [13].
Gambar 2.8. Arduino Leonardo.
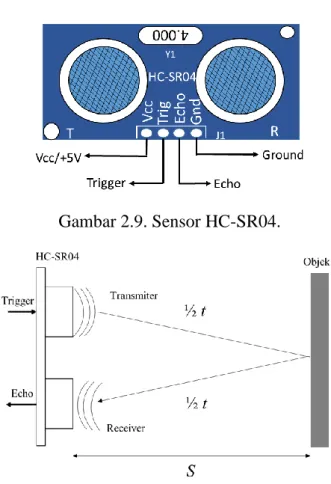
2.3.3 Sensor HC-SR04
Sensor HC-SR04 yang ditunjukan oleh Gambar 2.8 merupakan suatu sensor ultrasonik yang digunakan sebagai sensor untuk melakukan pengukuran jarak. Sensor HC-SR04 memiliki empat pin, yaitu pin VCC atau sebagai sumber tegangan positif yang bekerja pada sensor, pin
Trigger sebagai pin untuk memproses sinyal atau transmiter, pin Echo
sebagai pin penerima dan pengolah sinyal sehingga terdapat nilai keluaran yang kita inginkan atau sebagai receiver, dan juga terdapat pin GND (ground) yang berfungsi sebagai sumber tegangan negatif yang terdapat
13
pada sensor. Prinsip kerja dari sensor bisa dilihat pada Gambar 2.9 yaitu pemantulan suara atau bunyi ultrasonik yang diterima oleh transmitter dan akan terpantul kembali oleh receiver sehingga dihasilkan nilai jarak dengan frekuensi tertentu [5]. Nilai jarak (S) yang dihasilkan memerlukan waktu tempuh atau waktu pengukuran sebanyak t dengan kecepatan suara yang digunakan adalah 340 m/s, sehingga jarak antara sensor dapat diukur menggunakan persamaan 2.1
S = 𝑡 ×340 m/s
2 . (2.1)
Gambar 2.9. Sensor HC-SR04.
Gambar 2.10. Prinsip kerja sensor HC-SR04.
2.3.4 Sensor IR (Infrared)
Sensor IR memanfaatkan berkas sinar inframerah. Berkas sinar inframerah ini merupakan radiasi elektromagnetik yang mempunyai panjang gelombang lebih panjang daripada cahaya tampak, dan lebih
14
pendek dari radiasi gelombang radio dengan nilai panjang gelombangnya 1000 nm sampai 0,01 cm. Sensor IR yang digunakan dalam penelitian ini yaitu sensor dengan tipe GP2Y0A21YK0F yang bisa mengukur rentang jarak 10-80 cm, dalam penelitian ini sensor digunakan untuk mengukur jarak pergeseran dari suatu penghalang yang tertarik oleh suatu material yang dipengaruhi oleh faktor-faktor tertentu sehingga menyebabkan terjadinya tanah longsor.
Sensor jarak IR ini memanfaatkan berkas sinar inframerah guna memantulkan objek untuk mengukur jaraknya. Jarak tersebut dihitung dengan triangulasi berkas sinar. Bentuk fisika atau Gambar sensor ini bisa dilihat pada Gambar 2.10(a). Sensor ini terdiri dari IR LED (Infrared
Light Emitting Diode) serta detektor sinar atau yang biasa disebut dengan
PSD (Position Sensitive Detector) [23] seperti pada Gambar 2.10(b). Pada saat berkas sinar dipantulkan oleh suatu objek, berkas sinar yang dipantulkan akan mendeteksi sinar di titik optik yang tercipta pada PSD Gambar 2.11(a), dimana saat jarak yang dideteksi oleh sensor semakin jauh, maka berkas sinar yang diterima oleh PSD akan semakin kekanan seperti yang ditunjukan pada Gambar 2.11(b) [14].
(a) (b)
15
(a) (b)
Gambar 2.12. Prinsip kerja sensor IR (a) jarak dekat dan (b) jarak jauh [15].
2.3.5 RTC
Bentuk fisika atau gambar dari Real Time Clock terlihat pada Gambar 2.12(a) yang merupakan suatu chip (IC) yang mempunyai peran sebagai pencacah waktu secara otomatis dan juga IC dengan kristal 32KHz yang bisa mempertahankan frekuensi dengan baik [16]. Pinout RTC terlihat pada gambar 2.12(b) yang terdiri dari delapan pin VCC1, X1, X2, GND, VCC2, SCLK, I/O, dan RST.
(a) (b)
Gambar 2.13. (a) RTC dan (b) pinout RTC [17].
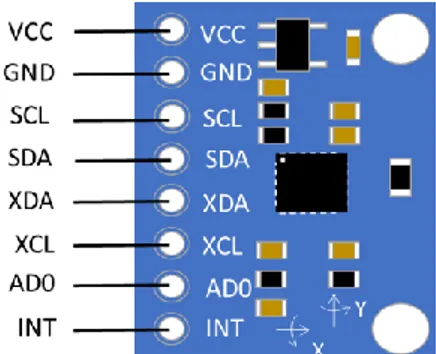
2.3.6 Sensor MPU-6050
Sensor MPU-6050 merupakan sensor dengan fitur tracking motion pertama kali yang ada di Indonesia dengan mengkombinasikan tiga axis
gyroscope serta tiga axis accelerometer gambar dari sensor ini bisa dilihat
pada Gambar 2.13. Sensor ini dilengkapi dengan tiga konventer ADC 16 bit guna membaca ataupun mengkonversi keluaran dari MPU-6050, keluaran digital dari MPU-6050 merupakan X,Y,Z.
16
MPU-6050 bekerja berlandaskan pada prinsip piezoelektrik. Dalam kasus ini dibayangkan terdapat bola didalam kubus, dimana bilik atau sisi kubus terbuat dari kristal piezoelektrik, apabila kita menggerakan kubus tersebut hingga bola dalam kubus bergerak menabrak bilik atau sisi kubus tersebut maka tercipta arus piezoelektrik, gerakan bola didalam kubus tersebut bergerak kesumbu X,Y,Z oleh karenanya kita bisa memastikan kemiringan serta besarnya kemiringan tersebut [18].
Gambar 2.14. Sensor MPU-6050.
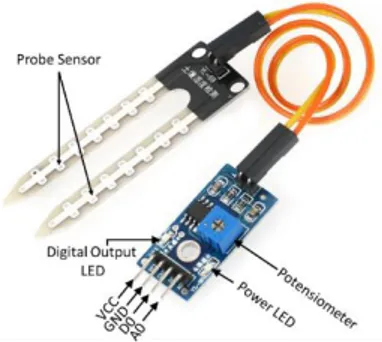
2.3.7 Soil Moisture Sensor
Sensor ini ialah sensor yang bisa menentukan kelembaban tanah. Sensor ini terdiri dari dua komponen pendeteksi yang berperan guna mengaliri arus dalam tanah serta membaca resistansi yang didapatkan dan memastikan kelembaban pada tanah yang dapat dilihat pada Gambar 2.14. Resistansi pada tanah akan mempunyai nilai yang berubah-ubah [30]. Hal ini dikarenakan ketika sensor ini bekerja pada tanah dengan volume air yang banyak atau sangat lembab, sangat mudah bagi sensor untuk menghantarkan arus listrik. Dimana ketika arus listrik yang dihantarkan sangat besar maka pembacaan resistansi yang dihasilkan sangat kecil. Begitu pula sebaliknya jika sensor bekerja pada tanah kering atau tidak lembab maka akan sedikit arus listrik yang mengalir sehingga resistansi yang dihasilkan dari deteksi sensor akan besar [19].
17
Gambar 2.15. Soil moisture sensor.
2.3.8 Linear Bearing
Linear Bearing merupakan suatu lintasan yang digunakan untuk
mengontrol agar pergerakan yang dihasilkan dari bearing hanya berjalan atau melewati daerah yang sudah ditentukan, yaitu bergerak linear pada lintasan seperti Gambar 2.15.
Gambar 2.16. Linear bearing [20].
2.4 Sistem Deteksi Dini Tanah Longsor
Sistem deteksi dini atau Early Warning System (EWS) merupakan kesatuan informasi yang terdiri dari beberapa komponen yang akan memberikan notifikasi atau peringatan sedini mungkin saat akan terjadinya suatu kejadian. Dalam penelitian ini EWS digunakan sebagai sistem untuk monitoring terjadinya bencana tanah longsor. EWS dalam penelitian ini terdiri dari perangkat keras dan perangkat lunak. Perangkat keras terdiri dari beberapa sensor dan komponen pendukung lainnya, sedangkan perangkat lunak terdiri dari rancangan web server yang terintegrasi dengan IoT dan juga Long-Range (LoRa). Hasil dari pembacaan pada sistem perangkat keras akan dikirimkan ke
18
telegram pengakses akun website tersebut. Website yang dikembangkan dalam penelitian ini bernama Landslide Monitoring System (LMS) yang bisa memonitoring secara realtime.
![Gambar 2.2. Skematik jatuhan pada lereng [2].](https://thumb-ap.123doks.com/thumbv2/123dok/2703655.3642888/2.892.384.621.446.633/gambar-skematik-jatuhan-pada-lereng.webp)
![Gambar 2.3. Skematik robohan pada lereng [2].](https://thumb-ap.123doks.com/thumbv2/123dok/2703655.3642888/3.892.378.642.145.325/gambar-skematik-robohan-pada-lereng.webp)
![Gambar 2.5. Skematik longsoran translasi [2].](https://thumb-ap.123doks.com/thumbv2/123dok/2703655.3642888/4.892.358.656.133.355/gambar-skematik-longsoran-translasi.webp)
![Gambar 2.7. Skematik longsor aliran [2].](https://thumb-ap.123doks.com/thumbv2/123dok/2703655.3642888/5.892.346.676.133.334/gambar-skematik-longsor-aliran.webp)
![Gambar 2.12. Prinsip kerja sensor IR (a) jarak dekat dan (b) jarak jauh [15].](https://thumb-ap.123doks.com/thumbv2/123dok/2703655.3642888/12.892.238.696.129.301/gambar-prinsip-kerja-sensor-ir-jarak-jarak-jauh.webp)