MIKROKONTROLLER NODEMCU ESP8266
TUGAS AKHIR
DERVIN SIMANJUNTAK 182408031
PROGRAM STUDI D-III FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATRA UTARA
MEDAN 2021
i
RANCANG BANGUN SISTEM KONTROL SUHU DAN LEVEL AIR PADA TANAMAN HIDROPONIK BERBASIS
MIKROKONTROLLER NODEMCU ESP8266
TUGAS AKHIR
Diajukan untuk melengkapi tugas dan memenuhi syarat memperoleh gelar Ahli Madya
DERVIN SIMANJUNTAK 182408031
PROGRAM STUDI D-III FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATRA UTARA
MEDAN 2021
ii
PERNYATAAN ORISINALITAS
RANCANG BANGUN SISTEM KONTROL SUHU DAN LEVEL AIR PADA TANAMAN HIDROPONIK BERBASIS
MIKROKONTROLLER NODEMCU ESP8266
TUGAS AKHIR
Saya menyatakan bahwa laporan tugas akhir ini adalah hasil karya saya sendiri, kecuali beberapa kutipan dan ringkasan yang masing–masing disebutkan sumbernya.
Medan, 10 Agustus 2021
Dervin Simanjuntak
182408031
iii
iv
RANCANG BANGUN SISTEM KONTROL SUHU DAN LEVEL AIR PADA TANAMAN HIDROPONIK BERBASIS
MIKROKONTROLLER NODEMCU ESP8266
ABSTRAK
Perkembangan teknologi dalam bidang pertanian semakin tahun semakin pesat.
Salah satu teknologi yang layak disebarluaskan adalah teknologi hidroponik. Pada umumnya metode hidroponik yang dilakukan menggunakan media air. Pengontrolan suhu air dan level air untuk sistem hidroponik masih dilakukan secara manual. Pada penelitian ini dibuat suatu sitem pemantauan dan kendali otomatis untuk nutrisi, suhu dan tinggi pada air hidroponik. Proses pengontrolan menggunakan mikrokontroler NodeMCU esp8266 . Proses komunikasi data yang dilakukan oleh perangkat keras dan perangkat lunak menggunakan media nirkabel. Sistem pembacaan suhu air menggunakan sensor DS18B20, ketinggian air menggunakan sensor ultrasonik HC- SR04. Hasil dari penelitian ini sistem secara keseluruhan dapat melakukan proses pemantauan dan pengendalian suhu dan tinggi air pada tanaman hidroponik secara otomatis, saat tinggi air kurang dari batas minimal (5cm) maka pompa pengisian akan aktif, saat suhu air lebih dari batas maksimal (29°C) maka pompa air akan aktif untuk mersikulasi air pada supaya kembali normal. Suhu normal 18 - 29°C. Nilai suhu dan ketingian air akan di tampilkan pada lcd dan android.
Kata Kunci : Hidroponik, Level air,Suhu,Android,NodeMCU Esp8266
v
DESIGN AND DEVELOPMENT OF TEMPERATURE AND WATER LEVEL CONTROL SYSTEM ON HYDROPONIC PLANTS
BASED ON MICROCONTROLLER NODEMCU ESP8266
ABSTRACT
Technological developments in agriculture are growing rapidly every year. One technology that deserves to be disseminated is hydroponic technology. In general, the hydroponic method is carried out using water media. Controlling water temperature and water level for hydroponic systems is still done manually.
In this research, an automatic monitoring and control system is made for nutrients, temperature and height in hydroponic water. The control process uses a NodeMCU esp8266 microcontroller. The process of data communication carried out by hardware and software using wireless media. The water temperature reading system uses the DS18B20 sensor, the water level uses the HC-SR04 ultrasonic sensor. The results of this study the system as a whole can perform the process of monitoring and controlling the temperature and water level in hydroponic plants automatically, when the water level is less than the minimum limit (5cm) then the filling pump will be active, when the water temperature is more than the maximum limit (29°C). ) then the water pump will be active to circulate the water in order to return to normal.
Normal temperature 18 - 29°C. The temperature and water level values will be displayed on the LCD and Android.
Keywords : Hydroponics, Water level, Temperature, Android, NodeMCU Esp8266
vi
PENGHARGAAN
Segala puji dan syukur kepada Tuhan Yang Maha Esa, dengan limpahan berkat-Nya penyusunan Tugas Akhir ini dapat diselesaikan sesuai waktu yang telah ditetapkan.
Tugas Akhir ini disusun untuk melengkapi persyaratan dalam mencapai gelar Ahli Madya pada Program Studi Diploma Tiga Fisika Departemen Fisika Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
Adapun judul Tugas Akhir ini adalah :
Rancang Bangun Sistem Kontrol Suhu dan Level Air Pada Tanaman Hidroponik Berbasis Mikrokontroller NodeMCU Esp8266. Penulis menyadari bahwa tersusunnya Tugas Akhir ini dari Doa, perhatian, bimbingan, motivasi dan dukungan berbagai pihak, sehingga dengan keikhlasan dan kerendahan hati pada kesempatan ini penulis mengucapkan terima kasih yang sebesar-besarnya kepada :
1. Kedua orang tua saya tercinta serta saudara kandung yang telah memberikan bantuan moral maupun materi, semangat dan doa yang begitu besar kepada penulis.
2. Ibu Dr. Nursahara Pasaribu, M.Sc, selaku Dekan Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
3. Bapak Drs. Takdir Tamba, M.Eng. Sc, selaku Ketua Program Studi D-3 Fisika Fakultas Matematika dan Ilmu Pengetahuan Alam.
4. Bapak Drs. Aditia Warman, M.Si, selaku Sekretaris Program Studi D-3 Fisika Fakultas Matematika dan Ilmu Pengetahuan Alam.
5. Bapak Azhari, S.Pd., M.Si, selaku pembimbing saya yang telah banyak membantu dan mendukung penulis dalam menyelesaikan Tugas Akhir ini.
6. Seluruh Dosen dan Karyawan Program Studi D-3 Fisika Departemen Fisika Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
7. Teman seperjuangan Benediktus Situmorang, Hosea Hutajulu, Maria Manik, Jonius Siahaan, Deasy Hutapea, Mikka.
vii
8. Teman-teman satu kos puritha karyna dan Squad lobow coffe sebagai tempat berkeluh kesah dan penyemangat penulis yang selalu memberikan motivasi dan doa.
9. Teman-teman D-3 Fisika yang mendukung penulis menyelesaikan Tugas Akhir ini.
10. Seluruh pihak yang telah banyak membantu penulis dalam menyelesaikan Tugas Akhir yang namanya tidak dapat penulis sebutkan satu persatu.
Penulis menyadari sepenuhnya bahwa dalam pembuatan Tugas Akhir ini masih jauh dari kesempurnaan, untuk itu penulis mengharapkan kritik dan saran dari pembaca yang bersifat membangun dalam penyempurnaan Tugas Akhir ini.
Semoga Tugas Akhir ini menjadi ibadah yang baik bagi penulis dan menjadi ilmu yang bermanfaat bagi pembaca.
Medan, 10 Agustus 2021 Penulis
Dervin Simanjuntak
viii
DAFTAR ISI
PERNYATAAN ORISINALITAS ... ii
PENGESAHAN TUGAS AKHIR………iii
ABSTRAK………..iv
ABSTRACT………v
PENGHARGAAN ... vi
DAFTAR ISI ... viii
DAFTAR GAMBAR ... x
DAFTAR TABEL ... xii
BAB I PENDAHULUAN ... 1
1.1 Latar Belakang... 1
1.2 Rumusan Masalah ... 2
1.3 Batasan Masalah ... 2
1.4 Tujuan ... 3
1.5 Manfaat ... 3
1.6 Metode Penelitian ... 3
1.7 Sistematika Penulisan ... 4
BAB II TINJAUAN PUSTAKA ... 5
2.1 Hidroponik ... 5
2.2 Mikrokontroller ... 6
2.3 NodeMCU ... 7
2.3.1 Versi NodeMCU ... 8
2.4 Sensor Ultrasomik HC-SR04 ... 12
2.4.1 Prinsip Kerja Sensor Ultrasonik HC-SR04 ... 14
2.5 Sensor Suhu DS18B20 ... 15
2.6 Power Suplay ... 16
2.6.1 Fungsi Power Supply ... 18
2.6.2 Cara Kerja Power Supply ... 18
2.7 Liquid Crystal Display (LCD) ... 19
2.7.1 Cara Kerja Liquid Crystal Display (LCD) ... 20
ix
2.8 Pompa Air ... 22
2.8.1 Prinsip Kerja Pompa Air ... 23
2.9 Relay ... 24
2.1.1 Resistor ... 25
2.11 Android ... 26
BAB III PERANCANGAN DAN PEMBUTAN PROYEK ... 26
3.1 Diagram Blok Sistem dan Cara Kerja Sistem ... 26
3.1.1 Diagram Blok Sistem ... 26
3.1.2 Cara Kerja Sistem ... 26
3.2 Perancangan Antar Muka Setiap Komponen ... 27
3.2.1 Mikrokontroller ... 27
3.2.2 Peranacangan Antar Muka NodeMCu Dengan Sensor Ultrasonik HC-SR04 ... 28
3.2.3 Perancangan Antar Muka NodeMCU Dengan LCD ... 28
3.2.4 Perancangan Antar Muka NodeMCU Dengan DS18B20 ... 29
3.2.4 Perancangan Antar NodeMCU Dengan Muka Relay ... 29
3.2.5 Flowchart ... 30
3.4.1 Rangkaian Keseluruhan Sistem... 31
3.3 Perancangan Dan Pembuatan PCB ... 32
3.4.1 Pengujian LCD ... 36
3.4.2 Pengujian Sensor Suhu DS18B20 ... 37
3.4.2 Pengujian Sensor Ultrasonik ... 39
3.4.3 Pengujian Pengiriman Data Ke Android ... 41
3.4.4 Pengujian Sistem ... 43
BAB IV HASIL DAN PEMBAHASAN ... 48
4.1 Analisis dan Hasil Pengukuran ... 48
4.4.1 Sensor DS18B20 ... 48
4.4.2 Sensor Ultrasonik HC-SR04 ... 49
BAB V PENUTUP ... 50
4.1 Kesimpulan ... 50
4.2 Saran ... 50
DAFTAR PUSTAKA ... 51 LAMPIRAN
x
DAFTAR GAMBAR
Gambar 2.1 NodeMCU
Gambar 2.2 Generasi pertama NodeMCU
Gambar 2.3 Skematik posisi pin NodeMCU dekvit V1 Gambar 2.4 Node MCU Dekvit V2
Gambar 2.5 Skematik posisi pin NodeMCU dekvit V2 Gambar 2.6 Node MCU Dekvit V3
Gambar 2.7 Skematik posisi pin NodeMCU dekvit V3 Gambar 2.8 Sensor Ultrasonik HC-SR04
Gambar 2.9 Sistem Pewaktu Pada sensor HCSR- 04 Gambar 2.10 Sensor suhu DS18B20
Gambar 2.11 Power suplay
Gambar 2.12 LCD ( Liquid Crystal Display ) Gambar 2.13 Tampilan konfigurasi pin LCD Gambar 2.14 Pompa DC celup
Gambar 2.15 Relay Gambar 2.16 Resistor
Gambar 2.17 Nilai resitansi pada gelang warna Gambar 3.1 Gambar diagram blok sistem
Gambar 3.2 Skematik mikrokontroller NodeMCU Esp 8266 Gambar 3.3 Skematik rangkaian ultrasonik
Gambar 3.4 Skematik rangkaian LCD Gambar 3.5 Skematik rangkaian DS18B20 Gambar 3.6 Skematik rangkaian Relay 4 chanel
xi Gambar 3.7 Flowchart pada sistem otomatis Gambar 3.8 Rangkaian keseluruhan
Gambar 3.9 Rangkaian pcb Gambar 3.10 Tampilan LCD
Gambar 3.11 Hasil pengujian sensor DS18b20 Gambar 3.12 Hasil pengujian sensor hc –sr04 Gambar 3.13 pengujian dengan tampilan ke android Gambar 3.14 Alat keseluruhan
xii
DAFTAR TABEL
Tabel 2.1 Pin – pin LCD
Tabel 3.1 hasil pengujian sensor ultrasonik Tabel 3.2 Hasil pengujian keseluruhan Tabel 4.1 Pengukuran sensor DSB1820
Tabel 4.2 Pengujian sensur suhu DS18B20 terhadap waktu Tabel 4.3 Pengukuran sensor ultrasonik
Table 4.4 Pengujian sensor ultrasonik hc-sr04 terhadap waktu
1
BAB I
PENDAHULUAN
1.1Latar Belakang
Pertanian merupakan sektor yang sangat penting bagi masyarakat Indonesia.
Sektor pertanian sebagai sumber penghasilan bagi beberapa masyarakat, karena sebagian besar kawasan Indonesia merupakan lahan pertanian. Para petani biasanya menggunakan tanah untuk media dalam mengembangkan hasil pertaniannya.Namun di dalam perkotaan, sulit mencari lahan yang dapat ditanami, sehingga budidaya hidroponik dapat diterapkan di lahan yang sempit. Melihat banyaknya lahan yang tidak dipakai oleh masyarakat untuk lahan pertanian, maka saat ini ada cara lain untuk memanfaatkan lahan sempit sebagai usaha untuk mengembangkan hasil pertanian, yaitu dengan cara bercocok tanam secara hidroponik. Perkembangan teknologi dalam bidang pertanian semakin tahun semakin pesat. Salah satu teknologi yang layak disebarluaskan adalah teknologi hidroponik, hal ini dikarenakan semakin langkanya lahan pertanian akibat dari banyaknya sektor industri dan jasa, sehingga kegiatan usaha pertanian konvensional semakin tidak kompetitif karena tingginya harga lahan. Teknologi budidaya pertanian dengan sistem hidroponik diharapkan menjadi salah satu alternatif bagi masyarakat yang mempunyai lahan terbatas atau pekarangan, sehingga dapat dijadikan sebagai sumber penghasilan yang memadai.
Hidroponik merupakan tanaman yang media tanamnya tidak berupah tanah.
Teknik menanam hidroponik umumnya menggunakan media tanam berupa air.
Perkembangan ilmu pengetahuan dan teknologi telah mendorong manusia untuk berusaha mengatasi segala permasalahan yang timbul di sekitarnya serta meringankan pekerjaan yang ada. Pada umum nya metode hidroponik yang dilakukan menggunakan media air, diamana kondisi air yang perlu diperhatikan adalah suhu air, pasokan air, oksigen dan nutrisi pada air. Pengontrolan suhu air dan level air untuk sistem hidroponik masih dilakukan secara manual ataupun konvesional. Pengontrolan secara manual tidak dapat dilakukan setiap saat karena adanya kesibukan dan perkerjaan lainnya sehiingga dibutuhkan alat pengontrol untuk memantau dan mengendalikan suhu dan level air dalam tanaman hidroponik. Suhu normal air dalam tanaman hidroponik berkisar 18 derajat celsius sampai 28 derajat
celcius. Salah satu upaya mengatur suhu air dan level air yang sesuai dengan tanaman adalah rancang bangun sistem kontrol hidroponik otomatis dengan menggunakan alat berbasis mikrokontroler Nudemcu Esp8266 untuk mengontrol suhu dan level air pada tanaman hidroponik. Pada saat suhu air tinggi sistem akan melakukan pemberian air agar kondisi air stabil. Pada saat level air tidak sesuai dengan kebutuhan tanaman makan sistem akan melakukan penamabahan air pada tanaman tersebut melalui pompa air.
Mikrokontroler merupakan jenis dari mikroprosesor yang dapat melakukan proses data secara digital. Banyak sekali kegunaan mikrokontroler yang sudah diterapkan dalam berbagai macam aspek aktivitas di kehidupan sehari-hari. Dari kegunaan mikrokontroler ini dapat di ciptakannya alat pengontrol suhu dan level air yang terintegrasi handphone menggunakan mikrokontroler Nodemcu Esp8266. Pada penelitian ini alat untuk untuk mengontrol suhu air berbasis mikrokontroler Nudemcu Esp8266. Terdapat dua sensor yang di pakai pada alat ini yaitu sensor suhu DS18B20 dan sensor HC-SR04untuk mengukur level air. Keluaran sensor lalu diterima oleh rangkaian pengkondisian sinyal agar dikuatkan sehingga tegangan sensor suhu DS18B20 dan sensor HC-SR04 lebih mudah terbaca oleh mikrokontroler dan hasil output dari sistem ini berupa tampilan yang ada pada lcd dan juga dapat di tampilkan pada android yang dikirim menggunakan modul wi-fi sehingga memudahkan penggunanya.
1.1 Rumusan Masalah
1. Bagaimana membuat sebuah alat pengontrol suhu dan level air pada tanaman hidroponik dengan sensor yang ada ?
2. Bagaimana prinsip kerja dari sensor ultrasonik HC-SR04 pada tanaman hidroponik?
3. Bagaimana prinsip kerja sensor suhu DS18B20 pada tanaman hidroponik?
1.3 Batasan Masalah
Mengingat keterbatasan waktu dan untuk menghindari topik yang tidak perlu maka penulis membatasi pembahasan pembuatan alat ini.
3
Adapun batasan masalah sebagai berikut :
1. Penelitian ini tidak sampai menyangkut masalah pemberian nutrisi makanan pada tanaman hidroponik.
2. Sensor yang digunakan adalah Sensor pendeteksi suhu DS18B20 dan sensor HC-SR04 untuk level air.
3. NodeMCU Esp8266 sebagai mikrokontroler untuk memproses data data yang suda ada.
1.4 Tujuan
1. Mengetahui dan memahami cara kerja alat pendeteksi suhu dan level air pada tanaman hidroponik yang terintegrasi android menggunakan mikrokontroler Nudemcu Esp 8266.
2. Merangkai sensor untuk mendekteksi suhu dan level air pada tanaman hidroponik.
3. Menguji dan mengkalibrasi sensor suhu dan level air pada tanaman hidroponik.
1.5 Manfaat
Manfaat dari penulisan tugas akhir ini adalah :
1. Untuk mendeteksi suhu dan level air pada tanaman hidroponik.
2. Untuk memudahkan masyarakat dalam pengontrolan tanaman hidroponik.
3. Untuk mengetahui kegunaan dari mikrokontroler Nudemcu Esp8266.
1.6 Metode Penelitian
Dalam menyelesaikan tugas akhir ini, langkah-langkah yang dilakukan adalah sebagai berikut :
1. Studi Literatur dan Diskusi
Merupakan metode yang dilakukan oleh penulis dengan membaca buku, diskusi dengan dosen pembimbing, mengunjungi dan mempelajari website.
2. Perancangan Konsep
Pada tahap ini dilakukan perancangan rangkaian sitem dan blok diagram.
3. Perancangan dan Pembuatan Alat
Merupakan proses dalam dalam pembuatan alatnya.
4. Analisis dan Pengujian
Metode analisis dan pengujian dimaksudkan untuk mengetahui sejauh mana alat yang dibuat pada tugas akhir ini dapat berfungsi sesuai dengan yang diharapkan .
5. Penyusunan Laporan
Tahap akhir pada tugas akhir ini adalah penyusunan laporan dengan tahap- tahap diatas.
1.7 Sistematika Penulisan
Untuk mempermudah penulisan tugas akhir ini, penulis membuat suatu sistematika penulisan yang terdiri dari :
1. BAB I: PENDAHULUAN
Bab ini akan membahas latar belakang tugas akhir, identifikasi masalah, batasan masalah, tujuan, metode penelitian, tinjauan pustaka, dan sistematika penulisan.
2. BAB II: LANDASAN TEORI
Bab ini akan menjelaskan tentang teori pendukung yang digunakan untuk pembahasan.
3. BAB III: PERANCANGAN ALAT
Bab ini membahas tentang perencanaan dan pembuatan sistem secara keseluruhan.
4. BAB IV: HASIL DAN PEMBAHASAN
Berisi tentang uji coba alat yang telah dibuat, pengoperasian dan spesifikasi alat dan lain-lain.
5. BAB V: KESIMPULAN DAN SARAN
Sebagai bab terakhir penulis akan menguraikan beberapa kesimpulan dari uraian bab-bab sebelumnya, dan penulis akan berusaha memberikan saran yang mungkin bermanfaat.
5
BAB II
TINJAUAN PUSTAKA
2.1 Hidroponik
Hidroponik adalah suatu budidaya menanam dengan mamakai (memanfaatkan) air tanpa memakai tanah dan menekankan penumbuhan kebutuhan nutrisi untuk tanaman. Kebutuhan air pada tanaman hidroponik lebih sedikit dibandingkan kebutuhan air pada budidaya dengan memakai media tanah. Hidroponik memakai air yang lebih efisien, jadi sangat cocok diterapkan pada daerah yang mempunyai pasokan air yang terbatas. Hidroponik berasal dari kata Yunani yaitu hydro yang berarti air dan ponos yang artinya daya. Hidroponik berasal dari kata hydro yang berarti air dan ponos yang berarti daya, dengan demikian hidroponik dapat diartikan memberdayakan air. Kegunaan air sebagai dasar pembangunan tubuh tanaman dan berperan dalam proses fisiologi tanama. Sejarah mencatat bahwa hidroponik sudah dimulai oleh Bangsa Babylonia pada tahun 600 SM yaitu berupa taman gantung (hanging garden). Seperti halnya Bangsa Babylonia, Bangsa Cina juga telah mencoba menerapkan cara bercocok tanam tanpa menggunakan media tanah sebagai media tanam. Bangsa Cina telah menerapkan teknik bercocok tanam yang dikenal dengan “Taman Terapung”. Bahkan di Mesir, Cina dan India juga sudah menerapkan cara bercocok tanam dengan menggunakan pupuk organik yang mereka gunakan sebagai suplai bahan makan untuk tanaman yang mereka tanam di dalam bedengan pasir yang terletak di tepi sungai.
Sistem DFT (Deep Flow Technique) adalah suatu sistem dalam teknik budidaya hidroponik yang menggunakan wadah (bak tanam) dengan posisi yang mendatar dan air sebagai media utama. Sistem ini mirip dengan NFT (Nutrirent Film Technique), namun berbeda dengan NFT yang menggunakan lapisan tipis air sebagai penyuplai nutrisi pada tanaman, pada sistem DFT larutan nutrisinya menggenang sehingga apabila listrik mati dan pompa tidak menyala, maka tanaman pada sisitem DFT tidak mengalami gangguan asupan nutrisi karena akar tanaman masih berada dalam larutan nutrisi.
2.2 Mikrokontroller
Mikrokontroler merupakan chip mikrokomputer yang secara fisik berupa sebuah IC (Integrated Circuit). Mikrokontroler biasanya digunakan dalam sistem yang kecil, murah dan tidak membutuhkan perhitungan yang sangat kompleks seperti dalam aplikasi di PC. Mikrokontroler banyak ditemukan dalam peralatan seperti microwave, oven, keyboard, CD player, VCR, remote control, robot dll.
Mikrokontroler berisikan bagian-bagian utama yaitu CPU (Central Processing Unit), RAM (Random-Access Memory), ROM (Read-Only Memory) dan port 1/0 (Input/Output). Selain bagian-bagian utama tersebut, terdapat beberapa perangkat keras yang dapat digunakan untuk banyak keperluan seperti melakukan pencacahan, melakukan komunikasi serial, melakukan interupsi dll. Mikrokontroler tertentu bahkan menyertakan ADC (Analog-To-Digital Converter), USB controller, CAN (Controller Area Network) dll.
Mikrokontroler bekerja berdasarkan program (perangkat lunak) yang ditanamkan didalamnya, dan program tersebut sesuai dengan aplikasi vang diinginkan.Aplikasi mikrokontroler normalnya terkait pembacaan data dari luar dan atau pengontrolan peralatan diluarnya. Contoh aplikasi yang sangat sederhana adalah melakukan pengendalian untuk menyalakan dan mematikan LED yang terhubung ke kaki mikrokontroler. Mikrokontroler memiliki jalur-jalur masukan (port masukan) serta jalur-jalur keluaran (port keluaran) yang memungkinkan mikrokontroler tersebut untuk bisa digunakan dalam aplikasi pembacaan data, pengontrolan serta penyajian informasi. Port masukan digunakan untuk memasukkan informasi atau data dari luar ke mikrokontroler. Contoh informasi yang dimasukkan ke mikrokontroler ini adalah informasi kondisi saklar yang dihubungkan ke kaki mikrokontroler, apakah sedang terbuka atau tertutup. Jalur masukan umumnya berupa jalur digital, dimana jalur ini digunakan oleh mikrokontroler untuk membaca keadaan digital (apakah logika 0 atau 1) yang diberikan oleh perangkat di luar mikrokontroler. Mikrokontroler tertentu berisikan ADC dengan sebagian dari jalur- jalur 1/0-nya yang digunakan sebagai masukan analog. Jalur-jalur ini selanjutnya bisa digunakan untuk keperluan seperti pembacaan tegangan dari sensor suhu analog.
Port keluaran digunakan untuk mengeluarkan data atau informasi dari mikrokontroler. Adanya port keluaran mengendalikan perangkat seperti LED, motor,
7
relay dan menyajikan informasi melalui perangkat seperti seven-segment dan LCD.
Untuk bisa bekerja, mikrokontroler perlu diberikan tegangan dari luar. Umumnya IC mikrokontroler dapat bekerja pada tegangan 5V, namun demikian, sebagian IC mikrokontroler seperti ATMEGA16L dapat dioperasikan dengan tegangan 3V.
2.3 NodeMCU
NodeMCU adalah sebuah platform IoT yang bersifat opensource. Terdiri dari perangkat keras berupa System On Chip ESP8266. dari ESP8266 buatan Espressif System, juga firmware yang digunakan, yang menggunakan bahasa pemrograman scripting Lua. [Sumardi, 2016] Istilah NodeMCU secara default sebenarnya mengacu pada firmware yang digunakan dari pada perangkat keras development kit NodeMCU bisa dianalogikan sebagai board arduino-nya ESP8266.
Gambar 2.1 NodeMCU
Sejarah lahirnya NodeMCU berdekatan dengan rilis ESP8266 pada 30 Desember 2013, Espressif Systems selaku pembuat ESP8266 memulai produksi ESP8266 yang merupakan SoC Wi-Fi yang terintegrasi dengan prosesor Tensilica Xtensa LX106.
Sedangkan NodeMCU dimulai pada 13 Oktober 2014 saat Hong me-commit file pertama NodeMCU-firmware ke Github. Dua bulan kemudian project tersebut dikembangkan ke platform perangkat keras ketika Huang R meng-commit file dari board ESP8266 , yang diberi nama devkit v.0.9. Berikutnya, di bulan yang sama.
Tuan PM memporting pustaka client MQTT dari Contiki ke platform SOC ESP8266 dan di-c0mmit ke project NodeMCU yang membuatnya mendukung protokol IOT MQTT. Pemutakhiran penting berikutnya terjadi pada 30 Januari 2015 ketika Devsaurus memporting u8glib ke project NodeMCU yang memungkinkan NodeMCU bisa mendrive display LCD, OLED, hingga VGA. Demikianlah, project
NodeMCU terus berkebang hingga kini berkat komunitas open source dibaliknya, pada musim panas 2016 NodeMCU sudah terdiri memiliki 40 modul fungsionalitas yang bisa digunakan sesuai kebutuhan developer.
Karena jantung dari NodeMCU adalah ESP8266 ( khususnya seri ESP-12, termasuk ESP-12E) maka fitur – fitur yang dimiliki NodeMCU akan kurang lebih sama ESP-12 (juga ESP-12E untuk NodeMCU v.2 dan v.3) kecuali NodeMCU telah dibungkus oleh API sendiri yang dibangun berdasarkan bahasa pemrograman eLua, yang kurang lebih cukup mirip dengan javascript. Beberapa fitur tersebut antara lain :
1. 10 Port GPIO dari D0 – D10 2. Fungsionalitas PWM
3. Antarmuka 12C dan SPi 4. Antarmuka 1 wire 5. ADC
Modul ini membutuhkan daya sekitar 3.3v dengan memiliki tiga mode wifi yaitu Station, Access Point dan Both (Keduanya). Modul ini juga dilengkapi dengan prosesor, memori dan GPIO dimana jumlah pin bergantung dengan jenis ESP8266 yang kita gunakan. Sehingga modul ini bisa berdiri sendiri tanpa menggunakan mikrokontroler apapun karena sudah memiliki perlengkapan layaknya mikrokontroler.
2.3.1 Versi NodeMCU
Beberapa pengguna awal masih cukup bingung dengan beberapa kehadiran board NodeMCU. Karena sifatnya yang open source tentu akan banyak produsen yang memproduksinya dan mengembangkannya. Secara umum ada tiga produsen NodeMCU yang produknya kini beredar di pasaran: Amica, DOIT, dan Lolin/WeMos. Dengan beberapa varian board yang diproduksi yakni V1, V2 dan V3.
a. Generasi pertama / board v.0.9 (biasa disebut V1)
9
Gambar 2.2 Generasi pertama NodeMCU
Board versi 0.9 sering disebut di pasar sebagai V.1 adalah versi asli yang berdimensi 47mm x 31mm. Memiliki inti ESP-12 dengan flash memory berukuran 4MB. Berikut adalah pinout dari board v.0.9
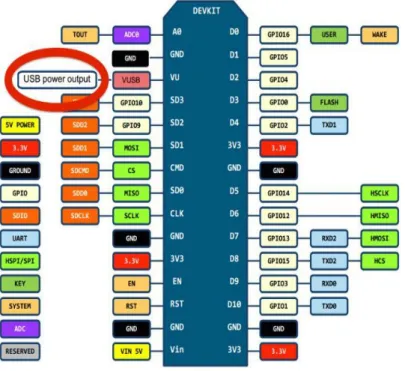
Gambar 2.3 Skematik Posisi Pin NodeMCU Devkit V1
Namun beberapa produk juga ada yang menggunakan chip ESP-12E sebagai inti dari board v.0.9 dengan tampilan board berubah menjadi hitam.
b. Generasi kedua / board v 1.0 ( biasa disebut V2)
Gambar 2.4 NodeMCU Dekvit V2
Generasi kedua adalah pengembangan dari versi sebelumnya, dengan chip yang ditingkatkan dari sebelumnya ESP12 menjadi ESP12E. Dan IC Serial diubah dari CHG340 menjadi CP2102.
Gambar 2.5 Skematik posisi pin NodeMCU dekvit v2 c. Generasi ketiga / board v 1.0 ( biasa disebut v3 lolin )
Sedangkan untuk V3 sebenarnya bukanlah versi resmi yang dirilis oleh NodeMCU. Setidaknya sampai posting ini dibuat, belum ada versi resmi untuk V3 NodeMCU. V3 hanyalah versi yang diciptakan oleh produsen LoLin dengan
11
perbaikan minor terhadap V2. Diklaim memiliki antarmuka USB yang lebih cepat.
Gambar 2.6 NodeMCU Dekvit V3
Jika anda bandingkan dengan versi sebelumnya, dimensi dari board V3. akan lebih besar dibanding V2. Lolin menggunakan 2 pin cadangan untuk daya USB dan yang lain untuk GND tambahan. Tentu 3 jenis versi ini akan berkembang dan bertambah seiring dengan waktu karena sifatnya yang opensource. Mungkin beberapa bulan atau beberapa tahun setelah tulisan ini dibuat akan muncul versi- versi lain yang beredar.
Gambar 2.7 Skematik Posisi Pin NodeMCU Dektvit V3
2.4 Sensor Ultrasomik HC-SR04
Sensor adalah sesuatu yang digunakan untuk mendeteksi adanya perubahan lingkungan fisik atau kimia. Variable keluaran dari sensor yang diubah menjadi besaran listrik disebut transduser. Pada saat ini, sensor telah dibuat dengan ukuran sangat kecil dengan orde nanometer. Ukuran yang sangat kecil ini sangat memudahkan permakaian dan menghemat energi, berikut penjelasan mengenai macam-macam sensor.
Sensor ultrasonik adalah sebuah sensor yang berfungsi untuk mengubah besaran fisis (bunyi) menjadi besaran listrik dan sebaliknya. Cara kerja sensor ini didasarkan pada prinsip dari pantulan suatu gelombang suara sehingga dapat dipakai untuk menafsirkan eksistensi (jarak) suatu benda dengan frekuensi tertentu. Disebut sebagai sensor ultrasonik karena sensor ini menggunakan gelombang ultrasonik (bunyi ultrasonik).
Gambar 2.8 Sensor Ultrasonik HC-SR04
Sensor ini merupakan sensor ultrasonik siap pakai, satu alat yang berfungsi sebagai pengirim, penerima, dan pengontrol gelombang ultrasonik. Alat ini bisa digunakan untuk mengukur jarak benda dari 2cm - 4m dengan akurasi 3mm. Alat ini memiliki 4 pin, pin Vcc, Gnd, Trigger, dan Echo. Pin Vcc untuk listrik positif dan Gnd untuk ground-nya. Pin Trigger untuk trigger keluarnya sinyal dari sensor dan pin Echo untuk menangkap sinyal pantul dari benda. Gelombang ultrasonik adalah gelombang bunyi yang mempunyai frekuensi sangat tinggi yaitu 20.000 Hz. Bunyi ultrasonik tidak dapat di dengar oleh telinga manusia. Bunyi ultrasonik dapat didengar oleh anjing, kucing, kelelawar, dan lumba-lumba. Bunyi ultrasonik nisa merambat melalui zat padat, cair dan gas. Reflektivitas bunyi ultrasonik di permukaan zat padat hampir sama dengan reflektivitas bunyi ultrasonik di
13
permukaan zat cair. A kan tetapi, gelombang bunyi ultrasonik akan diserap oleh tekstil dan busa.
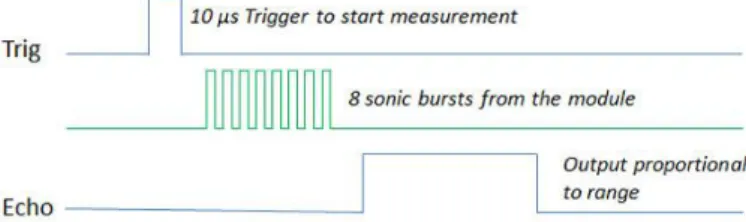
Cara menggunakan alat ini yaitu: ketika kita memberikan tegangan positif pada pin Trigger selama 10uS, maka sensor akan mengirimkan 8 step sinyal ultrasonik dengan frekuensi 40kHz. Selanjutnya, sinyal akan diterima pada pin Echo. Untuk mengukur jarak benda yang memantulkan sinyal tersebut, maka selisih waktu ketika mengirim dan menerima sinyal digunakan untuk menentukan jarak benda tersebut.
Berikut adalah visualisasi dari sinyal yang dikirimkan oleh sensor HC-SR04.
Gambar 2.9 Sistem Pewaktu Pada sensor HCSR- 04
Pada sensor ultrasonik, gelombang ultrasonik dibangkitkan melalui sebuah alat yang disebut dengan piezoelektrik dengan frekuensi tertentu. Piezoelektrik ini akan menghasilkan gelombang ultrasonik (umumnya berfrekuensi 40kHz) ketika sebuah osilator diterapkan pada benda tersebut. Secara umum, alat ini akan menembakkan gelombang ultrasonik menuju suatu area atau suatu target. Setelah gelombang menyentuh permukaan target, maka target akan memantulkan kembali gelombang tersebut.
Ada beberapa penjelasan mengenai gelombang ultrasonic. Sifat dari gelombang ultrasonik yang melalui medium menyebabkan getaran partikel dengan medium aplitudo sama dengan arah rambat longitudinal sehingga menghasilkan partikel medium yang membentuk suatu rapatan atau biasa disebut Strain dan tegangan yang biasa disebut Strees. Proses lanjut yang menyebabkan terjadinya rapatan dan regangan di dalam medium disebabkan oleh getaran partikel secara periodic selama gelombang ultrasonic lainya. Gelombang ultrasonic merambat melalui udara dengan kecepatan 344 meter per detik, mengenai obyek dan memantul kembali ke sensor ultrasonik. Seperti yang telah umum diketahui, gelombang ultrasonik hanya bisa didengar oleh makhluk tertentu seperti kelelawar dan ikan paus. Kelelawar menggunakan gelombang ultrasonic untuk berburu di malam hari sementara paus
menggunakanya untuk berenang di kedalaman laut yang gelap. Bagian – bagian dari sensor Ulttrasonik.
1. Pemancar Ultrasonik ( Transmiter)
Pemancar Ultrasonik ini berupa rangkaian yang memancarkan sinyal sinusoidal berfrekuensi di atas 20 KHz menggunakan sebuah transducer transmitter ultrasonik.
2. Penerima Ultrasonik (Reciver)
Penerima Ultrasonik ini akan menerima sinyal ultrasonik yang dipancarkan oleh pemancar ultrasonik dengan karakteristik frekuensi yang sesuai. Sinyal yang diterima tersebut akan melalui proses filterisasi frekuensi dengan menggunakan rangkaian band pass filter (penyaring pelewat pita), dengan nilai frekuensi yang dilewatkan telah ditentukan. Kemudian sinyal keluarannya akan dikuatkan dan dilewatkan ke rangkaian komparator (pembanding) dengan tegangan referensi ditentukan berdasarkan tegangan keluaran penguat pada saat jarak antara sensor kendaraan mini dengan sekat/dinding pembatas mencapai jarak minimum untuk berbelok arah. Dapat dianggap keluaran komparator pada kondisi ini adalah high (logika ‘1’) sedangkan jarak yang lebih jauh adalahlow (logika’0’). Logikalogika biner ini kemudian diteruskan ke rangkaian pengendali (mikrokontroler).
Sensor jarak ini cocok digunakan untuk aplikasi – aplikasi yang membutuhkan perhitungan jarak antara satu benda dengan benda yang lain contohnya membuat robot yang dapat berjalan tanpa menabrak tembok, mengukur kedalaman suatu ruangan, mengukur ketinggian air, dan aplikasi – aplikasi kreatif lain nya.
2.4.1 Prinsip Kerja Sensor Ultrasonik HC-SR04
Secara detail, cara kerja sensor ultrasonik adalah sebagai berikut
1. Sinyal dipancarkan oleh pemancar ultrasonik dengan frekuensi tertentu dan dengan durasi waktu tertentu. Sinyal tersebut berfrekuensi diatas 20kHz.
Untuk mengukur jarak benda (sensor jarak), frekuensi yang umum digunakan adalah 40kHz.
15
2. Sinyal yang dipancarkan akan merambat sebagai gelombang bunyi dengan kecepatan sekitar 340 m/s. Ketika menumbuk suatu benda, maka sinyal tersebut akan di pantulkan oleh benda tersebut.
3. Setelah gelombang pantulan sampai di alat penerima, maka sinyal tersebut akan diproses untuk menghitung jarak benda tersebut.
2.5 Sensor Suhu DS18B20
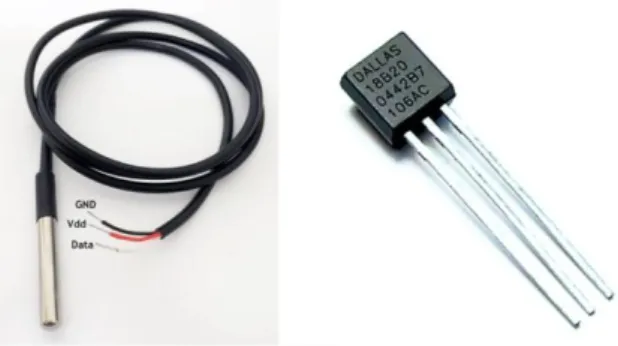
Sensor suhu DS18B20 merupakan termometer digital yang menyediakan 9-bit ADC sampai 12-bit ADC data pengukuran untuk suhu dalam satuan Celsius.Sensor suhu DS18B20 berkomunikasi melalui 1-Wire bus yang berarti hanya membutuhkan satu baris data untuk berkomunikasi dengan mikroprosesor pusat. Setiap sensor suhu DS18B20 memiliki serial kode 64-bit yang unik, yang memungkinkan beberapa sensor dapat berfungsi pada 1-Wire bus yang sama. Sensor ini sangat cocok untuk mengukur suhu air. Akurasi pengukuran temperaturnya cukup akurat dengan akurasi
±0.5ºC. Kekurangan dari DS18B20 ia tidak digunakan dilingkungan berair asin, karena dapat menyebabkan karat.
Gambar 2.10 Sensor suhu DS18B20 Karakteristik dari sensor suhu DS18B20 adalah sebagai berikut :
1. Dapat dikalibrasikan langsung ke dalam besaran derajat Celsius 2. Faktor skala linear + 10m V/ºC
3. Tingkat Akurasi 0,5ºC.
4. Jangkauan suhu antara -55ºC - 150ºC.
5. Bekerja pada tegangan 4 volt sampai 30 volt.
Sensor DS18B20 bekerja dengan mengubah besaran suhu menjadi besaran tegangan. Tegangan ideal yang keluar dari DS18B20 mempunyai perbandingan 100
setara dengan 1 volt. Sensor ini mempunyai pemanasan diri (self heating) kurang dari 0.1 , dapat dioperasikan dengan menggunakan pawer supplay tunggal dan dapat dihubungkan antar muka (interface) rangkain control yang sangat mudah.
Mikrokontroler Ic DS18B20 dapat langsung dihubungkan dengan PINA. Dimana PINA merupakan PIN mikrokontroler yang dapat mengkonversi tegangan menjadi bilangan digital (analog digital conversation )atau lebih dikenal dengan ADC
.
Sensor suhu DS18B20 berfungsi untuk mengukur perubahan suhu air yang terjadi pada penelitian ini dengan satuan derajat celsius (°C), sehingga pengguna dapat memantau perubahan suhu pada air nutrisi yang terdapat dalam wadah penampungan.
2.6 Power Suplay
Power suply adalah suatu hardware komponen elektronika yg mempunyai fungsi sebagai penghantar arus listrik dengan terlebih dahulu merubah tegangannya dari AC jadi DC. Jadi arus listrik PLN yang bersifat Alternating Current (AC) masuk ke powersupply, dikomponen ini tegannya diubah menjadi Direct Current (DC) baru kemudian dialirkan ke komponen lain yang membutuhkan. Proses pegubahan tegangan tersebut dilakukan karena hardware pada umumnya seperti komputer, hanya bisa bekerja dengna menggunakan arus DC. Ibaratnya makhluk hidup, power supply sama dengan jantung yang fungsi utamanya untuk memompa hasil proses pembentukan darah keseluruh tubuh yang memerlukannya. Power supply merupakan kata yang diadopsi dari bahasa inggris. Sedangkan penggunaan kata yang sebenarnya, dalam bahasa indonesia ialah Catu Daya.
Penampakan power supply bila dilihat luarnya adalah berupa kotak berbentuk persegi, sedangkan dari dalam berupa papan induk dengan sejumlah komponen berupa kesatuan rangkaian elektronika. Power supply dibedakan menjadi dua jenis berdasar rancangannya. Yang pertama ialah Catu Daya Internal, yakni komponen yang dibuat secara terintegrasi dengan motherboard / papan rangkaian induk. Contoh ampilifier, televisi, DVD Player, catu dayanya jadi satu dengan motherboard didalam chasing perangkat tersebut. Yang kedua ialah Catu Daya Eksternal, yakni komponen yang dibuat dengan terpisah dari motherboard perangkat elektroniknya. Contoh pengisi daya Laptop dan charger HP.
17
Power supply juga perangkat keras berupa kotak yang isinya merupakan kabel- kabel untuk menyalurkan tegangan ke dalam perangkat keras lainnya. Input power supply berupa arus bolak-balik (AC) sehingga power supply harus mengubah tegangan AC menjadi DC (arus searah). Besarnya listrik yang mampu ditangani power supply ditentukan oleh dayanya dan dihitung dengan satuan Watt. Power supply berfungsi sebagai penyuplai tegangan listrik langsung kepada komponen- komponen yang berada di dalam casing komputer. Power supply juga berfungsi untuk mengubah tegangan AC menjadi DC, karena perangkat keras komputer hanya dapat beroperasi dengan arus DC.
Power supply memakai konektor sebagai penghubungnya. Konektor pada catu daya terdiri dari berbagai jenis yang menyesuaikan dengan hardware / komponen yang akan disuplai dengan aliran listrik. Power supply juga memiliki kenektor kabel yang masing-masing konektor kabel tersebut memiliki fungsi yang berbeda-beda yang sangat dibutuhkan oleh komputer pada saat ini. Sehingga dapat disimpulkan bahwa power supply merupakan perangkat keras yang sangat penting dalam mengoperasikan suatu komputer. Selanjutnya saya jelaskan fungsi dari setiap jenis konektor dalam power supply:
1. Konektor 20 PIN dan 24 PIN ATX Motherboard : jenis konektor ini dipakai untuk menghubungkan Power supply dengan Motherboard untuk mengalirkan daya kepadanya.
2. Konektor 4 PIN dan 8 PIN : jenis konektor 4 pin 12v umumnya dipakai untuk komputer dengan pentium 4. Kemudian jenis konektor 8 pin 12v umumnya dipakai untuk jenis komputer server. Fungsi konektor ini untuk menyuplai daya secara khusus kepada processor.
3. 6 PIN AUX – Power Kabel : jenis konektor ini dipakai untuk komponen VGA Card berjenis PCIe karena komponen ini membuatuhkan daya yang lebih untuk beroperasi.
4. Konektor 4 PIN Peripheral : jenis konektor ini dipakai sebagai penghubung ke komponen seperti kipas angin; CD-ROOM; HD; dll.
5. Floppy Disk – Power Kabel : jenis konektor ini dipakai untuk menyuplai daya ke komponen floppy disk.
6. SATA – Power Kabel : jenis konektor ini dipakai untuk menyuplai daya ke komponen-komponen yg port-nya berjenis SATA. Contoh: CD-Room SATA dan Hard-Disk SATA.
2.6.1 Fungsi Power Supply
Fungsi utama power supply pada komputer adalah untuk menyediakan atau menyuplai arus listrik ke komputer. Power supply akan menarik jumlah arus listrik yang diperlukan dan mengubah arus listrik bolak-balik (alternating-current, AC) menjadi arus listrik searah (Direct Current, DC). Power supply kemudian menyuplai DC ke komponen-komponen komputer seperti Motherboard, Hardisk, Fan, dan komponen komputer lainnya. Power supply juga mengatur overheating (panas yang berlebih) dengan cara mengontrol tegangan (voltage), yang dapat berubah secara otomatis atau manual. Catu daya memuat sebuah transfomator di dalamnya, yang berfungsi untuk menurunkan tegangan dari sumber PLN ke suatu level tegangan yang lebih rendah. Catu daya biasanya memiliki sebuah rangkaian penyearah untuk mengubah output AC dari transfomator menjadi DC.
Gambar 2.11 Power Suply 2.6.2 Cara Kerja Power Supply
Saat user menekan tombol power pada komputer, maka power supply komputer akan melakukan tes dan cek sebelum menjalankan sistem komputer.
Apabila tes yang dilakukan berjalan dengan baik maka power supply akan mengirimkan sinyal khusus (disebut Power Good) pada motherboard sebagai tanda bahwa sistem komputer siap dijalankan. Setelah itu, power supply akan membagi daya sesuai dengan kapasitas yang dibutukan oleh masing-masing komponen komputer, seperti Motherboard, Hardisk/SSD, DVD Drive dan komponen komputer
19
lainnya. Power supply akan menyediakan daya dan menjaga agar arus listrik yang masuk pada komponen-komponen komputer tetap stabil.
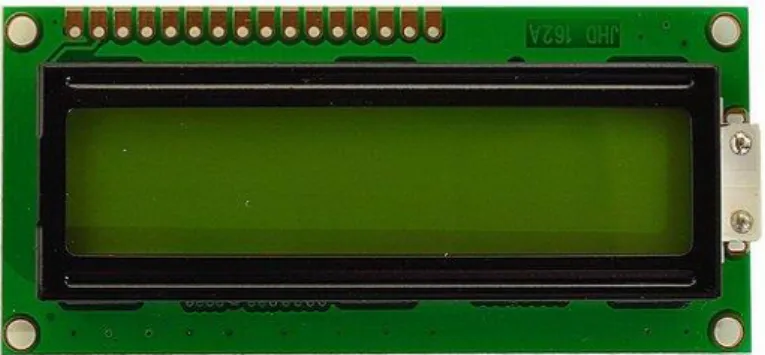
2.7 Liquid Crystal Display (LCD)
Liquid Crystal Display (LCD) adalah komponen yang dapat menampilkan tulisan.Salah satu jenisnya memiliki dua baris dengan setiap baris terdiri atas enam belas karakter.LCD seperti itu biasa disebut LCD 16x2. Debugging adalah istilah yang telah digunakan software komputer untuk menggambarkan suatu proses tidak bekerja dengan benar. Konon dikatakan bahwa istilah tersebut dipakai untuk pertama kalinya oleh Garce Hopper pada sekitar tahun 1940-an. Dimana pada waktu itu, komputer yang sebagian besarnya merupakan peralatan elektromekanis, ada yang berhenti beroperasi karena ada serangga yang terjebak di dalam sistem mekaniknya.Tetapi pada saat ini, bug bukan berbentuk fisik lagi, melainkan suatu virtual yang tidak dapat dilihat.
Gambar 2.12 LCD ( Liquid Crystal Display ) Konfigurasi pin dari LCD memliki karakteristik sebagai berikut :
1. Terdapat 16 x 2 karakter huruf yang bisa ditampilkan.
2. Setiap huruf terdari dari 5x7 dot – matriks cursor.
3. Terdapat 192 macam karakter.
4. Terdapat 80 x 8 bit display RAM (maksimal 80 karakter).
5. Memiliki kemampuan penulisan dengan 8 bit maupun dengan 4 bit.
6. Dibangun dengan osilator lokal.
7. Satu sumber tegangan 5 volt,
8. Otomatis reset saat tegangan dihidupkan,
9. Bekerja pada suhu 0º - 55º C.
Gambar 2.13 Tampilan konfigurasi pin LCD
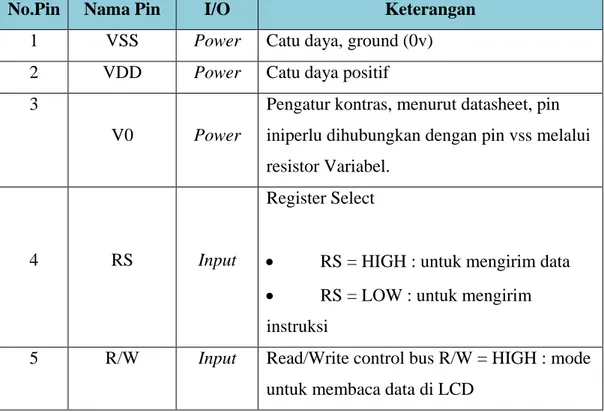
LCD yang digunakan pada alat ini mempunyai lebar display 2 baris 16 kolom atau biasa disebut sebagai LCD Character 16x2, dengan 16 pin konektor, yang didefinisikan sebagai berikut:
Tabel 2.1 Pin - Pin LCD
No.Pin Nama Pin I/O Keterangan
1 VSS Power Catu daya, ground (0v) 2 VDD Power Catu daya positif 3
V0 Power
Pengatur kontras, menurut datasheet, pin iniperlu dihubungkan dengan pin vss melalui resistor Variabel.
4 RS Input
Register Select
RS = HIGH : untuk mengirim data
RS = LOW : untuk mengirim instruksi
5 R/W Input Read/Write control bus R/W = HIGH : mode untuk membaca data di LCD
2.7.1 Cara Kerja Liquid Crystal Display (LCD)
Pada aplikasi umumnya RW diberi logika rendah 0. Bus data terdiri dari 4bit atau 8 bit. Jika jalur data 4 bit maka yang digunakan ialah DB4 sampai dengan DB7.
Sebagaimana terlihat pada table deskripsi, interface LCD merupakan sebuah parallel bus, dalam hal ini sangat memudahkan dan sangat cepat dalam pembacaan dan
21
penulisan data dari atau ke LCD. Kode ASCII yang ditampilkan sepanjang 8bit dikirim ke LCD secara 4bit atau 8bit pada satu waktu Jika mode 4bit yang digunakan, maka 2 nibble data dikirim untuk membuat sepenuhnya 8bit (pertama dikirim 4bit MSB lalu 4bit LSB dengan pulsa clock EN setiap nibblenya). Jalur control EN digunakan untuk memberitahu LCD bahwa mikrokontroler mengirimkan data ke LCD. Untuk mengirim data ke LCD program harus menset EN ke kondisi high 1dan kemudian menset dua jalur control lainnya (RS dan R/W) atau juga mengirimkan data ke jalur data bus. Saat jalur lainnya sudah siap, EN harus diset ke“0 dan tunggu beberapa saat, dan set EN kembali ke high 1. Ketika jalur RS berada dalam kondisi low 0, data yang dikirimkan ke LCD dianggap sebagai sebuah perintah atau instruksi khusus (seperti bersihkan layar, posisi kursor dll). Ketika RS dalam kondisi high atau 1,data yang dikirimkan adalah data ASCII yang akan ditampilkan dilayar.
Misal, untuk menampilkan huruf A pada layar maka RS harus diset ke 1. Jalur control R/W harus berada dalam kondisi low (0) saat informasi pada data bus akan dituliskan ke LCD. Apabila R/W berada dalam kondisi high 1, maka program akan melakukan query data dari LCD. Instruksi pembacaan hanya satu, yaitu Get. LCD status, lainnya merupakan instruksi penulisan, Jadi hamper setiap aplikasi yang menggunakan LCD, R/W selalu di set ke 0.Jalur data dapat terdiri 4 atau 8 jalur.Mengirimkan data secara parallel baik 4bit atau 8bit merupakan 2 mode operasi primer. Untuk membuat sebuah aplikasi interface LCD, menentukan mode operasi merupakan hal yang paling penting. Pada aplikasi umumnya RW diberi logika rendah “0”.Bus data terdiri dari 4-bit atau 8-bit.Jika jalur data 4-bit maka yang digunakan ialah DB4 sampai dengan DB7. Sebagaimana terlihat pada table diskripsi, interface LCD merupakan sebuah parallel bus, dimana hal ini sangat memudahkan dan sangat cepat dalam pembacaan dan penulisan data dari atau ke LCD. Kode ASCII yang ditampilkan sepanjang 8-bit dikirim ke LCD secara 4-bit atau 8 bit pada satu waktu.
Jika mode 4-bit yang digunakan, maka 2 nibble data dikirim untuk membuat sepenuhnya 8-bit (pertama dikirim 4-bit MSB lalu 4-bit LSB dengan pulsa clock EN setiap nibblenya). Jalur kontrol EN digunakan untuk memberitahu LCD bahwa mikrokontroller mengirimkan data ke LCD.Untuk mengirim data ke LCD program
harus menset EN ke kondisi high “1” dan kemudian menset dua jalur kontrol lainnya (RS dan R/W) atau juga mengirimkan data ke jalur data bus.Saat jalur lainnya sudah siap, EN harus diset ke “0” dan tunggu beberapa saat (tergantung pada datasheet LCD), dan set EN kembali ke high “1”. Ketika jalur RS berada dalam kondisi low
“0”, data yang dikirimkan ke LCD dianggap sebagai sebuah perintah atau instruksi khusus (seperti bersihkan layar, posisi kursor dll). Ketika RS dalam kondisi high atau
“1”, data yang dikirimkan adalah data ASCII yang akan ditampilkan dilay. Mode 8bit sangat baik digunakan ketika kecepatan menjadi keutamaan dalam sebuah aplikasi dan setidaknya minimal tersedia 11 pin I/0 (3pin untuk control, 8pin untuk data).Sedangkan mode 4bit minimal hanya membutuhkan 7bit (3pin untuk control, 4 pin untuk data). Bit RS digunakan untuk memilih apakah data atau instruksi yang akan ditransfer antara mikrokontroler dan LCD. Jika bit ini diset (RS = 1), maka byte pada posisi kursor LCD saat itu dapat dibaca atau ditulis. Jika bit ini di reset (RS = 0), merupakan instruksi yang dikirim ke LCD atau status eksekusi dari instruksi terakhir yang dibaca.
2.8 Pompa Air
Pompa adalah suatu alat atau mesin yang digunakan untuk memindahkan cairan dari suatu tempat ke tempat yang lain melalui suatu media perpipaan dengan cara menambahkan energi pada cairan yang dipindahkan dan berlangsung secara terus menerus. Pompa beroperasi dengan prinsip membuat perbedaan tekanan antara bagian masuk (suction) dengan bagian keluar (discharge). Dengan kata lain, pompa berfungsi mengubah tenaga mekanis dari suatu sumber tenaga (penggerak) menjadi tenaga kinetis (kecepatan), dimana tenaga ini berguna untuk mengalirkan cairan dan mengatasi hambatan yang ada sepanjang pengaliran. Pompa air merupakan suatu alat yang berfungsi untuk mengalirkan, memindahkan dan mensirkulasikan zat cair incomprosible dengan cara menaikkan tekanan dan kecepatan dari suatu tempat ke tempat lain, atau dengan kata lain pompa adalah alat yang merubah energi mekanik dari suata alat penggerak menjadi energy potensial yang berupa head, dengan demikian zat cair tersebut memiliki tekanan sesuai dengan head yang dimilikinya.
23
Gambar 2.14 Pompa DC Celup 2.8.1 Prinsip Kerja Pompa Air
Prinsip kerja pompa adalah menghisap dan melakukan penekanan terhadap fluida. Pada sisi hisap pompa atau biasa disebut dengan suction, elemen pompa akan menurunkan tekanan dalam ruang pompa sehingga akan terjadi perbedaan tekanan anatara ruang pompa dengan permukaan fluida yang dihisap. Dengan demikian fluida akan mengalir ke ruang pompa. Oleh elemen pompa fluida ini akan didorong atau diberikan tekanan sehingga akan mengalir ke dalam saluran tekan (discharge) melalui lubang tekan. Klasifikasi pompa menurut prinsip dan caa kerjanya dapat diklasifikasikan menjadi 2 yaitu pompa kerja positif (positive displament pump) dan pompa kerja dinamis (non positive displament pump). Pada prinsipnya, pompa air secara umum bekerja dengan cara mentransfer sejumlah volume air lewat ruang suction menuju ruang outlet dengan memanfaatkan impeler. Dengen begitu, seluruh ruang udara akan terisi oleh air dan menciptakan tekanan fluida untuk ditarik lewat dasar sumber air menuju lokasi tujuan. Untuk penggunaan mesim pompa air, air yang ada di dalam ruang impeler akan digerakkan menggunakan sebuah motor. Air akan terus didorong keluar menuju popa penyaluran selama impeleter tersebut tetap berputar. Selain itu, semua pompa menggunakan kekuatan dasar alam untuk memindahkan cairan. Ketika bagian pompa yang bergerak (impeler, baling-baling, diafragma piston, dll.) mulai bergerak, udara didorong keluar dari jalan. Pergerakan udara menciptakan vakum parsial (tekanan rendah) yang dapat diisi oleh lebih banyak udara, atau dalam kasus pompa air, adalah air. Prinsip pompa air ini mirip dengan mengisap sedotan. Vakum parsial dibuat di mulut Anda ketika Anda
mengisap sedotan. Cairan didorong ke atas karena perbedaan tekanan antara mulut dan atmosfer.
2.9 Relay
Relay adalah saklar mekanik yang dikendalikan atau dikontrol secara elektronik (elektromagnetik). Saklar pada relay akan terjadi perubahan posisi OFF ke ON pada saat diberikan energi elektromagnetik pada armature relay tersebut.
Relay pada dasarnya terdiri dari 2 bagian utama yaitu bagian kumparan dan contact point. Ketika kumparan diberikan tegangan DC atau AC, maka akan terbentuklah medan elektromagnetik yang mengakibatkan contact point akan mengalami switch ke bagian lain. Keadaan ini akan bertahan selama arus masih mengalir pada kumparan relay. Contact point akan kembali switch ke posisi semula jika tidak ada lagi arus yang mengalir pada kumparan relay. Relay memiliki kondisi contact point dalam 2 posisi. Kedua posisi ini akan berubah pada saat relay mendapat tegangan sumber pada kumparan. Kedua posisi tersebut adalah:
1. Posisi NO (Normally Open), yaitu posisi contact point yang terhubung ke terminal NO (Normally Open). Kondisi ini akan terjadi pada saat relay mendapat tegangan sumber pada elektromagnetnya.
2. Posisi NC (Normally Close), yaitu posisi contact point yang terhubung ke terminal NC (Normally Close). Kondisi ini terjadi pada saat relay tidak mendapat tegangan sumber pada elektromagnetnya.
Dilihat dari desain saklarnya maka relay dibedakan menjadi:
1. SPST (Single Pole Single Throw), relay ini memiliki 4 terminal yaitu 2 terminal untuk input kumparan elektromagnetik dan 2 terminal saklar. Relay ini hanya memiliki posisi NO (Normally Open) saja.
2. SPDT (Single Pole Double Throw), relay ini memiliki 5 terminal yaitu terdiri dari 2 terminal untuk input kumparan elektromagnetik dan 3 terminal saklar, relay jenis ini memiliki 2 kondisi NO dan NC.
3. DPST (Double Pole Single Throw), relay jenis ini memiliki 6 terminal yaitu terdiri dari 2 terminal untuk input kumparan elektromagnetik dan 4 terminal saklar untuk 2 saklar yang masing-masing saklar hanya memiliki kondisi NO
25
saja.
4. DPDT (Double Pole Double Thorow) relay jenis ini memiliki 8 terminal yang terdiri dari 2 terminal untuk kumparan elektromaknetik dan 6 terminal untuk 2 saklar dengan 2 kondidi NC dan NO untuk masing masing saklarnya.
Gambar 2.15 Relay 2.1.1 Resistor
Resistor adalah komponen yang terbuat dari arang dan bersifat menghambat, dimana komponennya dalam suatu rangkaian elektronika berfungsi sebagai pembatas aliran listrik atau penghambatnya. Jadi, komponen elektronika ini memiliki hambatan atau nilai resistansi tertentu yang termasuk dalam komponen elektronika pasif.
Komponen ini paling banyak difungsikan sebagai penghambat dalam aliran listrik.
Satuannya sendiri dinyatakan dalam Ohm (Ω). Artikel ini berisi informasi lengkap mengenai pengertian dan kegunaannya, cara membaca nilai, dan macam-macam dari komponen satu ini. Resistor Merupakan salah satu kategori komponen elektronika pasif yang memiliki fungsi dan kegunaan sebagai penghambat dan pembatas aliran listrik dalam suatu rangkaian.Komponen ini termasuk komponen elektronika yang paling sering didapati dan paling banyak dipakai hampir di semua rangkaian elektronika. Biasanya disingkat dengan huruf “R” yang menyatakan tahanan atau hambatan.
Gambar 3.16 resitor
Untuk membaca nilai komponen pasif ini dari gelang warna Anda membutuhkan bantuan tabel warna. Pada tubuh komponen pada umumnya, terdapat 4-5 gelang warna yang mewakili nilai resistansinya.Warna gelang yang berada di bagian terakhir merupakan penanda nilai toleransi. Berikut ini cara mudah membaca nilai resistansi dari gelang warna:
Gambar 3.17 nilai resitansi dari gelang warna 2.11 Android
Android adalah sistem operasi untuk ponsel yang berbasis Linux. Android menyediakan platform terbuka bagi 3 para pengembang buat menciptakan aplikasi mereka sendiri untuk digunakan oleh bermacam piranti bergerak. Google Inc.
membeli Android Inc. pendatang baru yang membuat software (perangkat lunak) untuk telepon genggam. Kemudian untuk mengembangkan Android di bentuklah Open Handset Alliance yang merupakan gabungan dari 34 perusahaan peranti keras, peranti lunak dan telekomunikasi termasuk Google, HTC, Intel, Motorola, Qualcomm, TMobile, dan NVidia.
Antarmuka pengguna Android umumnya berupa manipulasi langsung, menggunakan gerakan sentuh yang serupa dengan tindakan nyata, misalnya
27
menggeser, mengetuk, dan mencubit untuk memanipulasi objek di layar, serta papan ketik virtual untuk menulis teks. Selain perangkat layar sentuh, Google juga telah mengembangkan Android TV untuk televisi, Android Auto untuk mobil, dan Android Wear untuk jam tangan, masing-masingnya memiliki antarmuka pengguna yang berbeda. Varian Android juga digunakan pada Laptop, konsol permainan, kamera digital, dan peralatan elektronik lainnyaPada saat perilisan perdana Android pada tanggal 5 november 2007, Android bersama Open Handset Alliance menyatakan mendukung pengembangan standar terbuka pada perangkat seluler. Di lain pihak, Google merilis kode-kode Android dibawah lisensi Apache, sebuah lisensi perangkat lunak dan standar terbuka perangkat seluler. Terdapat dua jenis distributor sistem pada operasi Android. Pertama yang dapat dukungan penuh dari Google atau Google Mail Service (GMS) dan kedua adalah yang benar-benar bebas distribusinya tanpa dukungan langsung dari Google atau dikenal sebagai Open Handset Distribution (OHD). Android memiliki berbagai keunggulan sebagai software yang memakai basis kode komputer yang bisa didistribusikan secara terbuka (open source) sehingga pengguna bisa membuat aplikasi baru di dalamnya.
Android memiliki beberapa aplikasi seperti native Google yang terintegrasi seperti pushmail Gmail, Google Maps, dan Google Calendar.
26
3.1 Diagram Blok Sistem dan Cara Kerja Sistem 3.1.1 Diagram Blok Sistem
Untuk mempermudah perancangan sistem diperlukan sebuah diagram blok sistem yang mana tiap blok mempunyai fungsi dan cara kerja tertentu. Adapun diagram blok dari sistem yang dirancang adalah sebagai berikut :
Gambar 3.1 Gambar diagram blok sistem 3.1.2 Cara Kerja Sistem
Dalam merancang sebuah alat, terdapat setiap komponen yang digunakan dalam perancangan alat tersebut. Adapun fungsi dari setiap blok komponen yang digunakan adalah:
1. Power Suply Adaptor (PSA) berfungsi sebagai pemberi tegangan serta arus listrik agar perangkat atau komponen-komponen lainnya dapat berfungsi sebagaimana mestinya
2. Sensor DS18B20 berfungsi sebagai input untuk mendekteksi suhu di dalam air pada wadah penampungan.
3. Sensor Ultrasonik HC-SR04berfungsi sebagai input untuk mengukur level air pada wadah penampungan.
NodeMCU esp8266 Sensor Suhu
DS18b20
SSensor Ultrasonik Hc-sr04
LCD Power supply
Pompa Air
Tampilan Ke Android
27
4. NodeMCU Esp8266 berfungsi sebagai pengendali sistem seluruh nya.
Mikrokontroller ini sudah disain Esp8266 yang berfungsi untuk konektivitas jaringan Wifi antara mikrokontroller itu sendiri dengan jaringan Wifi.
NodeMCU berbasis bahasa pemograman lua namun dapat juga menggunakan Arduino IDE untuk Pemogramannya.
5. Relay adalah saklar mekanik yang dikendalikan atau dikontrol secara elektronik (elektromagnetik). Saklar pada relay akan terjadi perubahan posisi OFF ke ON pada saat diberikan energi elektromagnetik pada armature relay.
6. Pompa Air berfungsi sebagai mengalirkan air ke wadah utama apabila wadah utama kekurangan air atau suhu air nya tidak normal.
7. LCD ( Liquid Crystal Place ) adalah salah satu display elektronik yang berfungsi sebagai penampil suhu air dan ketinggian air.
3.2 Perancangan Antar Muka Setiap Komponen 3.2.1 Mikrokontroller
Mikrokontroller adalah sebuah chip yang berfungsi sebagai pengontrol
rangkaian elektronik dan umumnya dapat meniyimpan program, dan terdiri dari CPU (Central Processing Unit ), memori, I/O tertentu dan unit pendukung sperti Analog- to-digital converter (ADC) yang sudah terintegrasi di dalamnya.
Gambar 3.2 Skematik mikrokontroller NodeMCU
3.2.2 Peranacangan Antar Muka NodeMCU Dengan Sensor Ultrasonik HC-SR04
Perancangan ini melalui sebuah perhitungan jarak yang dikelolah NodeMCU sebagai pembacaan program pengukuran jarak. Pada rangkaian ini sensor Ultrasonik pin trigger dihubungkan pada pin D3, pin Echo di hubungkan pada pin D5, Vcc duhubungkan dengan Vcc dan Ground dihubungkan dengan Ground pada NodeMCU.
Gambar 3.3 Antar muka NodeMCU dengan sensor ultrasonik hc-sr04 3.2.3 Perancangan Antar Muka NodeMCU Dengan LCD
Perancangan ini dilakukan untuk menampilkan suhu pada air nutrisi dan level air pada air nutrisi.
Gambar 3.4 Antar muka NodeMCU dengan LCD
29
3.2.4 Perancangan Antar Muka NodeMCU Dengan Sensor DS18B20
Perancangan ini digunakan untuk mengirimkan data yan dari sensor suhu DS18B20 akan di kirim ke mikrokontroler NodeMCU esp8266, Pin DQ akan dihubungkan dengan pin D4, pin Vcc dihubungkan dengan Vcc dan groundd dihubungkan dengan ground pada NodeMCU
Gambar 3.5 Antar muka NodeMCU dengan sensor DS18B20 3.2.4 Perancangan Antar Muka NodeMCU Dengan Relay
Pada rangkaian ini relay yang digunakan relay 4 chanel. In 1 akan dihubungkan pada pin d6, In 2 akan dihubungkan dengan pin D7 dan In 3 dihubungkan dengan pin D0 pada NodeMCU.
Gambar 3.6 Rangkaian Relay 4 chanel
3.2.5 Flowchart
Gambar 3.7 Flowchart pada sistem otomatis Mulai
Inisialisasi
Baca Suhu Dan Level Air
Suhu ≤29℃ dan Level Air ≤ 5 Cm
Suhu ≤29℃ dan Level Air ≥ 5 Cm
Suhu ≥29℃ dan Level Air ≤ 5 Cm
Pompa 1 OFF Pompa 2 OFFF Dikirim ke blynk dengan
modul Esp8266
Pompa 1 OFF Pompa 2 ON
Pompa 1 ON Pompa 2 ON
Selesai Suhu ≥29℃ dan
Level Air ≥5 Cm
31
3.4.1 Rangkaian Keseluruhan Sistem
Dalam perancangan sistem untuk mengontrol suhu dan level air pada tanaman hidroponik menggunakan mikrokontroler NodeMCU Esp8266, penulis menggunakan dua buah sensor yaitu Sensor DS18b20 untuk mengukur suhu air dan sensor ultrasonik HC-SR04 untuk mengukur level air. Sistem rangkaian tersebut melibatkan beberapa komponen rangkaian, dimana diantaranya sudah dijelaskan. Komponen yang aktif yang membantu perancangan sistem ini diantaranya adalah mikrokontroler NodeMCU esp8266, Sensor DS18b20, Sensor ultrasonik HCS-R04, pompa air dc, apabila kedua sensor sudah mendeteksi suhu dan level air maka pompa air dc akan otomatis memberi air tambahan secara otomatis.. Semua sistem sudah diproses dan dikontrol dengan menggunakan mikrokontroler NodeMCU Esp8266.
Gambar 3.8 Rangkaian keseluruhan
3.3 Perancangan Dan Pembuatan PCB
3.3.1 Alat dan Bahan Pembuatan PCB ( Printed Circuit Board) Alat dan bahan pembuatan PCB sebagai sebagai berikut :
1. Papan PCB
Printed Circuit Board (PCB) adalah sebuah papan rangkaian yang terbuat dari bahan ebonit( Pertinax) atau fiber glass dimana salah satu sisi permukaannya dilapisi dengan tembaga tipis.Jenis ini umumnya disebut single side karana hanya memiliki satu permukaan yang berlapiskan tembaga. Sedangkan PCB yang kedua sisinya digunakan untuk pembuatan rangkaian yang bersifat kompleks dan rumit, sehingga kedua bagian sisinya dapat difungsikan sebagai jalur – jalur pengawatan, PCB ini juga berfungsi sebagai dudukan komponen – komponen.
2. Kertas Milimeter Blok
Kertas milimeter block adalah kertas bergaris yang memiliki block kotak bergaris yang telah terukur. Dimana kertas milimeter block dalam pembuatan papan PCB digunakan untuk menggambar gambar rangkaian, gambar tata letak komponen, dan gambar jalur PCB.
3. Setrika
Setrika ini berfungsi untuk menggosok gambar rangkaian yang sudah di print ke permukaan papan PCB polos agar dapat digunakan untuk membuat projek tersebut.
4. Pelarutan PCB
Bahan Pelarut untuk menghilangkan lapisan tembaga pada papan PCB yang tidak tergambar pola jalur (tidak tertutup tinta) adalah dengan melakukan etching (pelarutan). Ada beberapa bahan kimia yang dapat dipergunakan untuk etching diantaranya adalah larutan :
a. Feri Clorida (FeCI3) b. Natrium Sulfat ( Na2S04) c. Asam Nitrat ( HNO3)
d. Asam Clorida + Perhidrosida ( HC1 + H202)
33
5. Amplas
Amplas (kadang juga disebut kertas pasir) adalah sejenis kertas yang digunakan untuk membuat permukaan benda - benda menjadi lebih halus dengan cara menggosokkan salah satu permukaan amplas yang telah ditambahkan bahan yang kasar kepada permukaan benda tersebut.
6. Pisau Cutter
Cutter memiliki beragam bentuk dan ukuran, ada yang besar, sedang, dan kecil. Ada yang berbentuk bulat, panjang atau seperti gantungan kunci. Tapi meskipun memiliki berbagai bentuk dan ukuran yang berbeda - beda, fungsi cutter cuma satu, yaitu untuk memotong.
7. Bor PCB
Bor PCB adalah merupakan bor listrik tangan mini yang digunakan untuk membuat lubang pada PCB, lubang - lubang yang terdapat di bantalan PCB yang berfungsi untuk menaruh komponen elektronika dan skrup ulir.
Langkah – langkah yang harus yang dilakukan dalam pembutan PCB :
a. Pertama-tama mendesain layout PCB menggunakan software Ares Proteus.
b. Mencetak gambar layout dengan kertas glossy tinta serbuk.
c. Selanjutnya mengunting kertas layout PCB yang sudah diprint sesuai dengan ukuran.
d. Mempersiapkan papan PCB dan mengukur PCB sesuai kebutuhan.
e. Memotong PCB sesuai dengan ukuran menggunakan alat pemotong atau cuter.
f. Membersihkan lapisan tembaga PCB dengan stel wool atau amplas sampai bersih. Hingga tidak ada bekas sidik jari atau karat yang menempel pada PCB tersebut.
g. Menyablon PCB
1. Memasang kertas glossy pada PCB dengan permukaan yang terdapat cetakan gambar menghadap ke sisi PCB polos yang terdapat lapisan tembaganya.
2. Menyiapkan setrika sampai dengan tingkat panas yang sedang. Setrika tidak boleh terlalu panas, karena bisa membuat tembaga pada PCB
memuai dan mengelembung. Juga tidak boleh terlalu dingin, karena selain akan membuat proses penyablonan lebih lama juga membuat tinta jalur PCB tidak menempel dengan sempurna.
3. Menyetrika kertas glossy dengan penekanan yang sedang dan merata pada setiap bagian PCB
4. Setelah kertas glossy merekat pada PCB, PCB direndam dalam air sampai kertas glossy terangkat dengan sendirinya, atau dengan mengosok kertas dengan perlahan menggunakan tangan mulai dari bagian tengah PCB. Hal ini dilakukan agar tidak merusak tinta yang sudah merekat pada PCB.
5. Setelah selesai proses penyablonan, memastikan tidak ada gambar jalur PCB yangterpotong atau mengelupas. Jika ada gambar jalur yang hilang, dapat ditambal atau disambung menggunakan spidol permanen.
h. Menaburkan FeCl3 ke dalam nampan non logam dan melarutkannya menggunakan air panas. Semakin banyak FeCl3 akan mempercepat pelarutan. Air yang panas juga akan mempercepat proses pelarutan.
i. Setelah FeCl3 larut dalam air, memasukan PCB yang terdapat gambar layout ke dalamnya. Untuk mempercepat proses pelarutan, dapat dilakukan dengan menggoyang-goyangkan nampan secara perlahan. Hal ini dilakukan secara terus menerus sampai semua tembaga yang tidak tertutup tinta dipermukaan PCB larut.
j. Setelah tembaga yang tidak tertutup tinta telah larut, PCB diangkat dan dibersihkan dengan air mengalir.
k. Mengeringkan PCB dan menggosoknya menggunakan steel wool sampai tintayang melekat pada jalur PCB bersih. Hal ini dilakukan agar mempermudah penyolderan komponen.
l. Tahap selanjutnya yaitu drilling atau membuat lubang pada PCB. Mata bor yang digunakan memiliki diameter kecil, antara 0,8 dan 1 milimeter untuk komponen dan 3 milimeter untuk mur-baut.
m. Setelah menggebor PCB, selanjutnya melapisi PCB menggunakan gondorukem pada permukaan tembagaPCB agar tidak mudah teroksidasi,