SKRIPSI
Disusun Oleh :
NURIFI FAJRIYAH
NPM. 0634010055
JURUSAN TEKNIK INFORMATIKA
FAKULTAS TEKNOLOGI INDUSTRI
UNIVERSITAS PEMBANGUNAN NASIONAL “VETERAN”
JAWA TIMUR
i
Puji syukur kepada Allah SWT yang telah memberikan rahmat dan karunia-Nya, sehingga penulis dapat menyelesaikan Proyek Tugas Akhir ini.
Tugas akhir yang dikerjakan ini adalah Sistem Pengendalian Akuarium dan Pemberian Pakan Ikan secara Otomatis Berbasis SMS. Karena semakin banyaknya orang yang hobi memelihara ikan khawatir dengan ikannya saat ditinggal pergi maka dengan sistem pengendalian ruang budidaya dan pemberian pakan ikan secara otomatis berbasis sms ini orang yang hobi memelihara ikan tidak perlu khawatir lagi, karena dengan sistem ini orang yang hobi memelihara ikan dapat melakukan pemberian makan, pergantian air, dan memperoleh informasi suhu dengan cara mengirim perintah melalui SMS.
Proyek Tugas Akhir ini merupakan mata kuliah yang wajib ditempuh di Fakultas Teknologi Industri Jurusan Teknik Informatika Universitas Pembangunan Nasional “Veteran” Jawa Timur.
UCAPAN TERIMA KASIH
Dalam pembuat laporan ini, penulis telah mendapatkan bantuan dan bimbingan dari berbagai pihak yang terkait, baik secara moril maupun materiil oleh karena itu pada kesempatan kali ini penulis ingin menyampaikan ucapan terima kasih kepada:
1. Bapak Prof. Dr. Ir. Teguh Soedarto, MP selaku Rektor Universitas Pembangunan Nasional “Veteran” Jawa Timur.
2. Bapak Sutiyono, MT selaku Dekan Fakultas Teknologi Industri UPN “Veteran” Jawa Timur.
3. Bapak Basuki Rahmat, S.Si, MT selaku Ketua Jurusan Teknik Informatika UPN “Veteran” Jawa Timur dan Dosen Pembimbing utama yang telah dengan sabar membimbing dengan segala kerendahan hati dan selalu memberikan kemudahan dan kesempatan bagi saya untuk berkreasi.
4. Bapak Wahyu Syaifullah J.SI, S.Kom selaku dosen pembimbing pendamping Proyek Tugas Akhir ini di UPN “Veteran” Jawa Timur yang telah banyak memberikan petunjuk, masukan, bimbingan, dorongan serta kritik yang bermanfaat sejak awal hingga terselesainya Skripsi ini.
5. Ibu Kartini, IR.MT selaku dosen penguji yang telah memberikan masukan, tambahan, serta kritik dan saran yang bermanfaat sebagai motivasi untuk menyelesaikan proyek tugas akhir ini.
7. Bapak Barry Nuqoba, S.Si, M.Kom selaku dosen penguji yang telah memberikan masukan, kritik dan saran yang bermanfaat sebagai motivasi untuk menyelesaikan proyek tugas akhir ini.
8. Bapak Ir. Kemal Wijaya, MT selaku dosen penguji yang telah memberikan masukan, tambahan, serta kritik dan saran yang bermanfaat sebagai motivasi untuk menyelesaikan proyek tugas akhir ini.
9. Kedua Orang Tua tercinta dan adik-adik yang telah memberi dukungan dan motivasi serta harapan-harapanya pada saat menyelesaikan tugas akhir ini. 10. Sahabat saya Desta yang telah membantu dan memberi dukungan dalam
menyelesaikan tugas akhir ini.
11. Teman-teman saya Bobi, Asrofi, Aziz, Dapit, Hanif, Adit, Yogi, Renda, Norman, Fenty, dan Sena yang selalu memberikan dukungan dan semangat. 12. Teman-teman di jurusan Teknik Informatika UPN “Veteran” Jawa Timur
DAFTAR ISI
HALAMAN JUDUL
LEMBAR PENGESAHAN
LEMBAR PENGESAHAN DAN PERSETUJUAN
2.12. Motor DC ... 21
3.1. Perancangan Sistem Pengendalian Ruang Budidaya dan Pemberian Pakan Ikan Secara Otomatis Berbasis SMS ... 27
3.2. Flowchart Dari Mikrokontroller AT89S52 Ke HP Siemens C55 .. ... 30
3.3. Blok Diagram ... 37
3.4. Kebutuhan Perancangan Hardware Sistem Pengendalian Ruang Budidaya dan Pemberian Pakan Ikan Secara Otomatis Berbasis SMS ... 39
3.5. Cara Merancang Sistem Pengendalian Ruang Budidaya dan Pemberian Pakan Ikan Secara Otomatis Berbasis SMS... 39
3.6. Analisa Perancangan Koneksi HP Siemens C55 ke Mikrokontroler AT89S52 ... 41
3.7. Rancangan dan Analisis Sistem Pengendalian Ruang Budidaya dan Pemberian Pakan Ikan Secara Otomatis Berbasis SMS... 42
3.7.1. Rancangan Sensor Suhu ... 42
3.7.2. Rancangan Pompa Pengurasan Air dan Pompa Pengisian Air …… ... 43
3.7.3. Rancangan Feeding... 43
3.7.4. Rancangan Koneksi Mikrokontroller ke Hand Phone ... 44
3.8. Rancangan Komponen Sistem Pengendalian Ruang Budidaya dan Pemberian Pakan Ikan Secara Otomatis Berbasis SMS ... 44
3.8.1. Mikrokontroler AT89S52 ... 45
3.8.2. ADC ADS 7288 ... 45
3.8.4. Sensor Suhu IC LM358... 46
BAB VI PENUTUP ... 79
6.1. Kesimpulan ... 79 6.2. Saran ... 79
DAFTAR GAMBAR
Gambar 2.1 Susunan Pin Mikrokontroler AT89S52 ... 7
Gambar 2.2 Karakteristik LM35 ... 10
Gambar 2.3 RTC DS1307 ... 11
Gambar 2.4 Diagram Pin DS1307 ... 12
Gambar 2.5 Dasar Pengaturan Arah Putar Motor... 22
Gambar 2.6 Pengaturan Arah Dengan Menggunakan Saklar... 22
Gambar 3.1 Flowchart Sistem Pengendalian Ruang Budidaya dan Pemberian Pakan Ikan Secara Otomatis Berbasis SMS ... 30
Gambar 3.2 Flowchart SMS ... 34
Gambar 3.3 Hardware Sistem Pengendalian Ruang Budidaya dan Pemberian Pakan Ikan Secara Otomatis Berbasis SMS... 37
Gambar 3.4 Sensor Suhu LM35 ... 43
Gambar 4.5 Sistem Pengendalian Ruang Budidaya dan Pemberian Pakan Ikan Secara Otomatis Berbasis SMS Sistem Pengikut Cahaya Tampak Dari Depan ……… ... 54
Gambar 4.6 Sistem Pengendalian Ruang Budidaya dan Pemberian Pakan Ikan Secara Otomatis Berbasis SMS Sistem Pengikut Cahaya Tampak Dari Belakang ……….. .... 55
Gambar 5.1 Perintah Untuk Mengatur Berapa Lama Auto Feeder Berputar ... 68
Gambar 5.2 Informasi Suhu dan Feeding telah dilakukan ... 69
Gambar 5.3 Perintah Untuk Mengatur Pengurasan dan Pengisian Air ... 69
Gambar 5.4 Informasi Suhu dan PUMP telah dilakukan ... 70
Gambar 5.5 Perintah Untuk Menjalankan Feed ... 70
Gambar 5.6 Pengaturan PUMP ... 71
Gambar 5.7 Pengaturan Suhu ... 71
Gambar 5.8 Pengaturan Feed... 72
Gambar 5.9 Auto Feeder Berputar ... 72
Gambar 5.10 Heater ON ... 73
Gambar 5.11 Sebelum dilakukan Pengurasan Air Pada Akuarium... 74
Gambar 5.12 Saat Pengurasan Berlangsung... 74
Gambar 5.13 Mulai Dilakukan Pengisian Air ... 75
x
DAFTAR TABEL
Tabel 2.1 Perintah-perintah AT Command... 17 Tabel 5.1 Uji Coba Kalibrasi antara Sensor Suhu LM35 dan
NURIFI FAJRIYAH
SISTEM PENGENDALIAN AKUARIUM DAN PEMBERIAN PAKAN IKAN SECARA OTOMATIS BERBASIS SMS
DOSEN PEMBIMBING I : BASUKI RAHMAT, S.Si, MT
DOSEN PEMBIMBING II : WAHYU SYAIFULLAH J.S., S.KOM
ABSTRAK
Sistem pengendalian ruang budidaya dan pemberian pakan ikan dari jarak jauh merupakan suatu kebutuhan tambahan bagi orang yang hobi memelihara ikan. Sistem pengendalian ruang budidaya dan pemberian pakan ikan saat ini telah berkembang seiring dengan adanya perkembangan teknologi yang canggih. Seperti adanya sistem pengendalian ruang budidaya dan pemberian pakan ikan secara otomatis berbasis mikrokontroler.
Saat ini banyak orang yang hobi memelihara ikan kebingungan saat bepergian jauh, karena tidak ada yang memberi pakan ikan dan mengganti air pada akuarium saat airnya keruh dan kondisi ikan juga tidak dapat terkontrol. Dengan bantuan media elektronik handphone yang teknologinya bisa digunakan untuk mengirim perintah SMS dan menerima informasi dalam bentuk SMS, maka user dapat memberi pakan ikan, melakukan pergantian air, dan memperoleh informasi suhu..
Dengan adanya permasalahan diatas dibuatlah Sistem Pengendalian Akuarium dan Pemberian Pakan Ikan Secara Otomatis Berbasis SMS sebagai proses control diperlukan HP siemens C55 untuk mengirim perintah ke mikrokontroler AT89S52 dan menerima informasi dari mikrokontroler AT89S5. Dan bahasa pemrogaman yang digunakan untuk Sistem Pengendalian Akuarium dan Pemberian Pakan Ikan Secara Otomatis Berbasis SMS yaitu Assembly untuk memprogram Mikrokontroler AT89S52 dan AT Command untuk memprogram HP siemens C55.
1
1.1 Latar Belakang
Pada saat ini banyak orang yang hobi memelihara ikan kebingungan jika mereka akan bepergian jauh. Karena tidak ada yang memelihara ikannya dengan baik. Kebanyakan mereka mengkhawatirkan pemberian makanan yang harus dilakukan setiap hari, penggantian air yang berkala dikarenakan semakin lama air dalam aquarium maka kejernihannya akan berkurang. Suhu air yang cenderung turun ketika hujan sehingga diperlukan penghangat air, dan juga terjadinya penguapan air yang mengakibatkan berkurangnya air dalam aquarium sedangkan mereka tidak ada di rumah.
Faktor penting pemeliharaan ikan pada aquarium adalah ketepatan waktu pemberian pakan ikan, suhu air, kejernihan air, dan ketinggian air dalam aquarium. Sensor suhu air yang digunakan untuk menetralkan suhu yang ada dalam aquarium, sensor kejernihan air digunakan untuk mengetahui kejernihan air yang pada aquarium sehingga jika aquarium kotor maka akan dilakukan penggantian air secara otomatis. Sedangkan sensor ketinggian air digunakan untuk mengukur tinggi air dalam aquarium.
Dengan adanya Sistem Pengendalian Akuarium dan Pemberian Pakan Ikan Secara Otomatis Berbasis SMS ini orang yang hobi memelihara ikan tidak perlu khawatir lagi dengan ikan peliharaannya. Karena mereka dapat memberikan pakan ikan, mengetahui informasi suhu, dan melakukan pergantian air pada akuarium dengan cara mengirim perintah SMS.
Dengan menggunakan Sistem Pengendalian Akuarium dan Pemberian Pakan Ikan Secara Otomatis Berbasis SMS, orang yang hobi memelihara ikan dapat memelihara ikan dengan lebih mudah. Hal itu karena sistem ini dapat diakses kapanpun dan dimanapun. Dengan adanya aplikasi ini user dapat mengatur dan menerima informasi langsung dari mikrokontroler.
1.2 Rumusan Masalah
Dari uraian latar belakang di atas maka permasalahan yang dapat dirumuskan adalah : “Bagaimana cara mengendalikan ruang budidaya dan pemberian pakan ikan secara otomatis berbasis SMS?”.
1.3 Batasan Masalah
Batasan - batasan masalah yang diberikan sesuai dengan permasalahan yang telah diterangkan diatas, antara lain:
1. Heater mulai bekerja jika suhu di bawah 26° C.
2. Informasi suhu dapat diketahui setelah feeding bekerja.
5. Alat ini menggunakan mikrokontroler AT89S52.
6. Suhu air diukur dengan menggunakan sensor suhu tipe LM35. 7. Sensor suhu bekerja ketika suhu minimum 260C.
8. Ketinggian air diukur dengan menggunakan 2 (dua) sensor ketinggian air, yaitu ketinggian air dalam keadaan minimum dan ketinggian air dalam keadaan maksimum.
9. Auto Feeder akan bekerja setiap 8 jam sekali dan akan berputar selama 5 detik
untuk memberi pakan ikan.
10.Terdapat 2 pompa air, yaitu pompa air in (mengisi air) dan pompa air out (membuang air).
11.Pembuangan air dilakukan setiap 3 hari sekali. 12.Pada pergantian air, air tidak diganti sepenuhnya.
1.4 Tujuan
Tujuan pembuatan Tugas Akhir ini adalah merancang dan membangun sistem pemeliharaaan ikan hias berbasis SMS.
1.5 Manfaat
Adapun manfaat yang dapat diambil dari pembuatan sistem pengendalian ruang budidaya ikan hias dan pemberian pakan ikan hias air tawar secara otomatis berbasis mikrokontroler adalah :
2. Dapat menggantikan air yang berkala dikarenakan semakin lama air dalam akuarium maka kejernihan air akan berkurang setiap 3 hari sekali.
3. Dapat mengetahui suhu air yang cenderung turun ketika musim hujan.
4. Dan juga dapat mengisi air ketika terjadinya penguapan air yang mengakibatkan berkurangnya air dalam akuarium.
5. User dapat mengatur dan menerima informasi dari mikrokontroler kapan pun dan dimana pun karena aplikasi ini berbasis SMS.
1.6 Metodologi Penelitian
Metodologi yang digunakan dalam penelitian ini adalah sebagai berikut : 1. Merancang dan menyusun akuarium dan pelengkap pendukungnya. 2. Merancang dan membuat perangkat keras Real Time Clock System.
3. Merancang dan membuat perangkat keras sistem pengontrol peralatan akuarium. 4. Merancang dan membuat perangkat lunak sistem pemeliharaan ikan hias air tawar
berbasis mikrokontroler.
5. Merancang serta menguji pemberian pakan dan pengurasan air pada aquarium melalui SMS.
6. Merancang perangkat lunak yang berfungsi untuk mengatur dan mengendalikan pemberian pakan ikan keseluruhan.
7. Menguji kinerja sistem secara keseluruhan serta mengambil data dari hasil perancangan.
1.7 Sistematika penulisan
Penulisan yang digunakan dalam laporan Tugas Akhir ini adalah sebagai berikut :
BAB I PENDAHULUAN
Bab ini berisi latar belakang permasalahan, perumusan masalah, batasan masalah, tujuan, manfaat dan sistematika penulisan laporan tugas akhir.
BAB II TINJAUAN PUSTAKA
Pada bab ini akan dijelaskan tentang teori-teori serta penjelasan-penjelasan yang dibutuhkan dalam pembuatan Sistem Pengendalian Akuarium dan Pemberian Pakan Ikan Secara Otomatis Berbasis SMS.
BAB III PERANCANGAN
Bab ini berisi tentang analisa dan perancangan sistem dalam pembuatan Tugas Akhir Sistem Pengendalian Akuarium dan Pemberian Pakan Ikan Secara Otomatis Berbasis SMS.
BAB IV IMPLEMENTASI
Bab ini berisi penjelasan hasil Tugas Akhir serta pembahasan suorce
code dari Sistem Pengendalian Akuarium dan Pemberian Pakan Ikan
BAB V PENGUJIAN DAN ANALISA
Bab ini berisi pengujian program Tugas Akhir.
BAB VI KESIMPULAN DAN SARAN
Bab ini berisi kesimpulan dan saran untuk proses pengembangan
selanjutnya.
DAFTAR PUSTAKA
2.1.Mikrokontroler AT89S52
Mikrokontroler adalah mikroprosessor yang dirancang khusus untuk
aplikasi kontrol, dan dilengkapi dengan ROM, RAM dan fasilitas I/O pada satu
chip. AT89S52 adalah salah satu anggota dari keluarga MCS-51/52 yang
dilengkapi dengan internal 8 Kbyte Flash PEROM (Programmable and Erasable
Read Only Memory), yang memungkinkan memori program untuk dapat
diprogram kembali. AT89S52 dirancang oleh Atmel sesuai dengan instruksi
satndar dan sesuai pin 80C5.
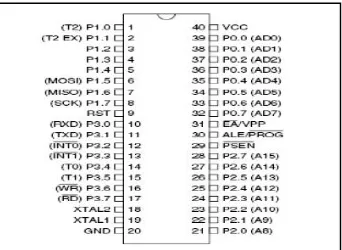
Mikrokontroler AT89S52 mempunyai 40 pin dengan catu daya tunggal 5
Volt. Ke-40 pin tersebut digambarkan pada Gambar 2.1 :
Gambar 2.1 Susunan Pin Mikrokontroler AT89S52
Fungsi dari masing-masing pin AT89S52 adalah :
1. Pin 1 – 8 (Port 1) merupakan port paralel 8 bit dua arah (bidirectional)
2. Pin 9 merupakan pin reset. Reset aktif jika mendapat catuan daya.
3. Pin 10 – 17 (Port 3) adalah port paralel 8 bit dua arah yang memiliki
fungsi pengganti sebagai berikut :
a. P3.0 (10) : RXD (port serial penerima data)
dari port 0 ke memori data dan input-output eksternal
h. P3.7 (17) : RD (read, aktif low). Sinyal kontrol pembacaan data
input-output eksternal ke port 0
4. Pin 18 sebagai XTAL 2, keluaran osilator yang terhubung pada kristal
5. Pin 19 sebagai XTAL 1, masukan ke osilator berpenguatan tinggi,
terhubung pada kristal
6. Pin 20 sebagai Vss, terhubung ke 0 atau ground pada rangkaian
7. Pin 21 – 28 (Port 2) adalah port paralel 8 bit dua arah. Port ini mengirim
byte alamat bila pengaksesan dilakukan pada memori eksternal
8. Pin 29 sebagai PSEN (Program Store Enable) adalah sinyal yang
digunakan untuk membaca, memindahkan program memori eksternal
(ROM/EPROM) ke mikrokontroler (aktif low)
9. Pin 30 sebagai ALE (Address Latch Enable) untuk menahan alamat bawah
(aktif low) yang diaktifkan saat memprogram internal flash memori pada
mikrokontroler (on chip)
10.Pin 31 sebagai EA (External Accesss) untuk memilih memori yang akan
digunakan, memori program internal (EA = Vcc) atau memori program
eksternal (EA = Vss), juga berfungsi sebagai Vpp (programming supply
voltage) pada saat memprogram internal flash memori pada
mikrokontroler
11.Pin 32 sampai 39 (Port 0) merupakan port pararel 8 bit dua arah. Berfungsi
sebagai alamat bawah yang dimultipleks dengan data untuk mengakses
program dan data memori eksternal
12.Pin 40 sebagai Vcc, terhubung ke +5 V sebagai catuan untuk
mikrokontroler. [ 3 ]
2.2.Sensor Suhu LM35
Sensor suhu LM35 berfungsi untuk mengkonversi besaran panas yang
ditangkap menjadi besaran tegangan. Jenis sensor suhu yang digunakan dalam
sistem ini adalah IC LM35, sensor ini memiliki presisi tinggi. Sensor ini sangat
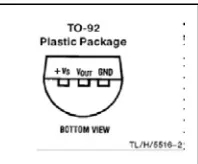
sederhana dengan hanya memiliki buah 3 kaki. Kaki pertama IC LM35
dihubungkan ke sumber daya, kaki kedua sebagai output dan kaki ketiga
Adapun gambar dari IC LM35 dapat dilihat pada Gambar 2.2 :
Gambar 2.2 Karakteristik LM35
Karakteristik dari IC LM35 adalah sebagai berikut :
1. Dapat dikalibrasi langsung ke dalam besaran Celcius.
2. Faktor skala linier +10mV/0C.
3. Tingkat akurasi 0,50C. Saat suhu kamat (260C). 4. Jangkauan suhu antara -550C sampai 1500C. 5. Bekerja pada tegangan 4 Volt hingga 30 Volt.
6. Arus kerja kurang dari 60μA.
7. Impedansi keluaran rendah 0,1Ω untuk beban 1 mA.
Sensor LM35 bekerja dengan mengubah besaran suhu menjadi besaran
tegangan. Tegangan ideal yang keluar dari LM35 mempunyai perbandingan
1000C setara dengan 1 Volt. Sensor ini mempunyai pemanasan diri (self heating)
kurang dari 0,10C, dapat dioperasikan dengan menggunakan power supply tunggal dan dapat dihubungkan antar muka (interface) rangkaian control yang sangat
2.3.RTC DS1307
Real Time Clock (RTC) merupakan suatu chip (IC) yang memiliki fungsi
sebagai penyimpan waktu dan tanggal. RTC DS1307 merupakan Real Time Clock
(RTC) menggunakan jalur paralel yang dapat menyimpan data-data detik, menit,
jam, tanggal, bulan, hari dalam seminggu, dan tahun valid hingga 2100.
RTC DS1307 merupakan Real Time Clock (RTC) menggunakan jalur
paralel yang memiliki antarmuka serial Two-wire (I2C), sinyal luaran gelombang
kotak terprogram (Programmable Squarewave), deteksi otomatis kegagalannya
(power-fail) dan rangkaian switch, konsumsi daya kurang dari 500nA
menggunakan mode baterai cadangan dengan operasional osilator. Tersedia fitur
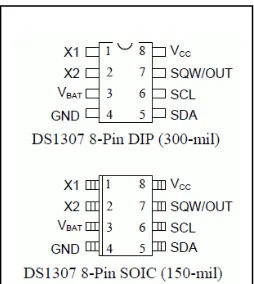
industri dengan ketahanan suhu -400C hingga +850C. Tersedia dalam kemasan 8 pin DIP atau SOIC. Seperti pada Gambar 2.3 :
Gambar 2.3 RTC DS1307
Sedangkan daftar pin DS1307 adalah sebagai berikut :
1. VCC : Primary Power Supply
2. X1, X2 : 32.768kHz Crystal Connection
3. VBAT : +3V baterai input
5. SDA : Serial Data
6. SCL : Serial Clock
7. SQW/Out : Square Wave/Output Drive
Diagram pin DS1307 dapat dilihat pada :
Gambar 2.4 Diagram PIN DS1307
Untuk masing-masing pin akan dijelaskan sebagai berikut :
1. X1 merupakan pin yang digunakan untuk dihubungkan dengan X2.
2. X2 berfungsi sebagai keluaran/output dari crystal yang digunakan. Terhubung
juga dengan X1.
3. VBAT merupakan backup supply serial RTC dalam menjalankan fungsi waktu
dan tanggal. Besarnya adalah 3V dengan menggunakan jenis Lithium Cell atau
sumber energi lain. Jika pin ini tidak digunakan maka harus terhubung dengan
Ground. Sumber tegangan dengan 48mAH atau lebih besar dapat digunakan
sebagai cadangan energi sampai lebih dari 10 tahun, namun dengan
4. GND berfungsi sebagai Ground.
5. SDA berfungsi sebagai masukan/keluaran (I/O) untuk I2C serial interface. Pin
ini bersifat open drain, oleh sebab ini membutuhkan external pull up resistor.
6. SCL berfungsi sebagai clock untuk input ke I2C dan digunakan untuk
mensinkronisasi pergerakan data dalam serial interface. Bersifat open drain,
oleh sebab itu membutuhkan external pull up resistor.
7. SWQ/OUT sebagai squafe wave/output driver. Jika diaktifkan, maka akan
menjadi 4 frekuensi gelombang kotak yaitu 1kHz, 4kHz, 8kHz, 32kHz. Sifat
dari pin ini sama dengan sifat pin SDA dan SCL sehingga membutuhkan
external pull up resistor. Dapat dioperasikan dengan VCC maupun dengan
VBAT.
8. VCC merupakan sumber tegangan utama. Jika sumber tegangan terhubung
dengan baik, maka pengaksesan data dan pembacaan data dapat dilakukan
dengan baik. Namun jika backup supply terhubung juga dengan VCC, namun
besar VCC di bawah VTP, maka pengaksesan data tidak dapat dilakukan. [ 3 ]
2.4.Heater
Secara umum ikan telah beradaptasi untuk hidup pada kisaran suhu
tertentu. Kisaran ini bervariasi dari satu spesies ke spesies lainnya. Meskipun
beberapa spesies dapat memahami perbedaan lintang tertentu. Sehingga,
misalnya, memungkinkan ikan-ikan daerah tropis yang memiliki persyaratan
hati-hati tetap diperlukan. Suhu rendah dibawah normal dapat menyebabkan ikan
mengalami lethargi, kehilangan nafsu makan, dan menjadi lebih rentan terhadap
penyakit. Ikan jangan dibiarkan berada dalam suhu yang terlalu dingin hanya
karena alasan untuk menghemat listrik. Sebaliknya pada suhu yang terlalu tinggi
ikan dapat mengalami stress pernapasan dan bahkan dapat menyebabkan
kerusakan insang permanen.
Peningkatan suhu kadang-kadang diperlukan untuk meningkatkan laju
metabolisma ikan sehingga perlakuan tersebut diharapkan dapat menolong
mempercepat proses penyembuhan suatu penyakit, dan atau mempercepat siklus
hidup suatu parasit sehingga parasit tersebut dapat segera dienyahkan. Meskipun
demikian, perlu diperhatikan bahwa semakin hangat air maka oksigen terlarut
akan semakin sedikit. Oleh karena itu, intensitas aerasi perlu ditingkatkan.
Perubahan suhu mendadak dapat menyebabkan ikan mengalami “shock”.
Hal ini kerap terjadi terutama pada saat memasukan ikan baru kedalam suatu
akuarium dimana usaha penyesuaian suhu tidak dilakukan dengan baik, atau pada
saat menambahkan air baru yang memiliki temperatur tidak sama.
Penurunan suhu secara perlahan, seperti terjadi apabila heater tidak
berfungsi, jarang menimbulkan shock, meskipun demikian temperatur hendaknya
dikembalikan ke kondisi semula secara perlahan-lahan dalam waktu satu jam atau
lebih.
Dalam kasus temperatur terlalu panas, seperti akibat termostat yang tidak
berfungsi dengan baik, maka intensitas aerasi hendaknya ditingkatkan untuk
mengkompensasi kadar oksigen terlarut yang rendah, dan biarkan temperatur
dan apabila ikan masih bertahan hidup, maka penggantian air sebanyak 20%
dengan air dingin bisa dilakukan. Pengembalian air hendakanya dilakukan secara
perlahan dengan cara disiphon plus peningkatan aerasi.
Suhu dapat diturunkan atau ditingkatkan sesuai dengan kebutuhan dengan
menggunakan perangkat tertentu. Untuk meningkatkan suhu dapat digunakan
heater yang telah dirancang secara khusus untuk akuarium. Heater hendaknya
selalu terendam air, heater yang ter-ekspos ke udara terbuka secara tidak sengaja
seperti pada saat penggantian air dapat menyebabkan kerusakan fatal pada heater
tersebut, dan bahkan bisa menimbulkan shock listrik. Untuk itu matikan heater
sebelum melakukan penggantian air atau sebelum melakukan kegiatan apapun
yang menyebabkan terjadinya penurunan ketinggian air akuarium.
Untuk menurunkan suhu air dan mempertahankannya pada suhu rendah,
seperti untuk keperluan akuarium tanaman dan koral, dapat digunakan chiller.
Chiller merupakan alat yang akan menyerap panas dari air dan membebaskannya
ke udara. Prinsip kerjanya kurang lebih sama dengan prinsip kerja alat pendingin
ruangan atau lemari pendingin. [ 4 ]
2.5.Bahasa Assembly
Bahasa Assembly adalah bahasa pemrogaman tingkat rendah karena dapat
berinteraksi langsung dengan hardware komputer. Dengan cara kerja CPU yang
menggunakan biner, maka bahasa assembly dapat bekerja sangat cepat. Sebuah
program yang terdiri atas 0 dan 1 disebut machine language. Saat ini kita kita
berinteraksi dengan komputer. Bahasa-bahasa tersebut disebut bahasa high level
karena kita tidak perlu mengetahui detail dari internal arsitektur CPU.
Program bahasa assembly terdiri dari tiga segmen, yaitu segmen kode,
data, dan stack. Segmen kode berisi intruksi yang melakukan tugas yang telah di
desain. Segmen data digunakan untuk menyimpan informasi yang harus diproses
oleh intruksi di segmen kode. Sedangkan segmen stack dipakai untuk menyimpan
informasi temporer.
Pada pemrogaman assembly CPU hanya dapat bekerja pada bilangan biner
yang dikenal oleh hardware komputer sehingga kecepatannya sangat tinggi.
Meskipun heksadesimal sudah digunakan dan lebih efisien untuk mewakili
bilangan biner, proses bekerja pada kode mesin masih menyulitkan manusia. Pada
akhirnya bahasa assembly berkembang, dan menyediakan mnemonic untuk
intruksi kode mesin dan dengan perlengkapan yang lainnya yang membuat
program lebih cepat dan jauh dari kesalahan (error).
Mnemonic adalah istilah dibidang ilmu komputer untuk menamakan suatu
perintah didalam bahasa assembly. Bahasa assembly adalah bahasa tingkat rendah
(Low-Level language) karena sesuai dengan struktur internal pada CPU.
Sedangkan assembler digunakan untuk menerjemahkan bahasa pemrogaman
assembly kedalam kode mesin (kadang disebut juga dengan kode objek). Bahasa
tingkat tinggi menerjemahkan kedalam kode mesin dan disebut dengan program
compiler. Operand adalah suatu item data yang dimanipulasi dan mnemonic
memberikan perintah pada CPU, yang mengatakan apa yang akan dilakukan pada
2.6.AT Command
AT Command adalah perintah-perintah yang digunakan dalam komunikasi
dengan serial port. Dengan AT Command kita dapat mengetahui vendor dari
Handphone yang digunakan, kekuatan sinyal, membaca pesan yang ada pada SIM
Card, megirim pesan, mendeteksi pesan SMS baru yang masuk secara otomatis,
menghapus pesan pada SIM Card dan masih banyak lagi.
Dalam program SMS Server yang akan kita buat nanti, tidak semua perintah
AT digunakan. Kita hanya menggunakan beberapa perintah AT yang ada
hubungannya dengan sistem kerja dari program SMS Server. Adapun perintah
yang akan digunakan, dapat dilihat pada tabel 2.1:
Tabel 2.1 Perintah-perintah AT Command
AT Command Keterangan
AT Mengecek apakah Handphone telah terhubung
AT+CMGF Untuk menetapkan format mode dari terminal
AT+CSCS Untuk menetapkan jenis encoding
AT+CNMI Untuk mendeteksi pesan SMS baru masuk secara
otomatis
AT+CMGL Membuka daftar SMS yang ada pada SIM Card
AT+CMGS Mengirim pesan SMS
AT+CMGR Membaca pesan SMS
AT+CMGD Menghapus pasan SMS
ATE1 Mengatur ECHO
ATV1 Mengatur input dan output berupa naskah
AT+CGMI Mengecek Merek HP
AT+CGMM Mengecek Seri HP
AT+CGMR Mengecek Versi Keluaran HP
AT Command Keterangan
AT+CSQ Mengecek Kualitas Sinyal
AT+CCLK? Mengecek Jam (waktu) pada HP
AT+CALM=<n> Mengecek Suara/dering HP saat di Telepon (ada
Telepon Masuk)
‘n’ adalah adalah angka yang menunjukkan jenis
dering
0 = berdering
1 dan 2 = Silent (Diam)
AT^SCID Mengecek ID SIM CARD
AT+CGSN Mengecek Nomor IMEI
AT+CLIP=1 Menampilkan nomor telepon pemanggil
AT+CLCC Menampilkan nomor telepon yang sedang
memanggil
AT+COPN Menampilkan Nama Sumua Operator di dunia
AT+COPS? Menampilkan nama operator dari SIM yang
digunakan
AT+CPBR=<n> Membaca nomor telepon yang disimpan pada buku
telepon (SIM CARD)
‘n’ adalah nomor urut penyimpanan
AT+CPMS=<md> Mengatur Memori dari HP
‘md’ adalah memori yang digunakan
ME = Memori HP
SM = Memori SIM CARD
[ 3 ]
2.7.Siemens C55
Dalam sistem ini diperlukan HP Siemens C55 yang digunakan sebagai alat
pendukung untuk memerintahkan suatu perintah ke dalam mikrokontroler. HP
Siemens C55 ini berfungsi menerima perintah dari nomor HP lain yang ingin
mengendalikan akuarium. Selain itu, HP siemens C55 ini juga berfungsi untuk
perintah dan penerimaan perintah dilakukan melalui SMS (Service Message
Sending). [ 5 ]
2.8.Sensor Ketinggian Air
Pada akuarium diperlukan suatu mekanisme untuk mengetahui ketinggian
permukaan air. Seringkali mekanisme tersebut masih berupa cara-cara manual,
semisal dengan melihat dan melakukan pengukuran secara langsung pada air yang
ada pada akuarium tersebut. Mungkin cara tersebut merupakan cara yang paling
sederhana dan gampang, tetapi akan sedikit repot jika untuk mengetahui
ketinggian air harus di ukur terlebih dahulu.
Maka dari itu diperlukan suatu mekanisme pengukur ketinggian
permukaan air secara otomatis, salah satunya dengan membuat semacam sensor
pengukur ketinggian air. Sensor ini kemudian dipasangkan pada penampung air
teresebut. Tampilan untuk melihat hasil pengukuran sensor tersebut tidak perlu
dekat dengan sensor, dapat ditempatkan di tempat lain sesuai kebutuhan, sehingga
hasil pengukuran dapat dilihat setiap saat dengan mudah. [ 12 ]
2.9.LCD Dot Matrik
LCD adalah sebuah display dot matrix yang digunakan untuk
menampilkan tulisan berupa angka atau huruf sesuai dengan yang diinginkan
digunakan adalah LCD dot matrix dengan karakter 2x16, sehingga kaki-kakinya
berjumlah 16 pin.
LCD sebagaimana output yang dapat menampilkan tulisan sehingga lebih
mudah dimengerti, dibanding jika menggunakan LED saja. Tampilan LCD terdiri
dari dua bagian, yakni bagian panel LCD yang terdiri dari banyak “titik”. LCD
dan sebuah mikrokontroler yang menempel dipanel dan berfungsi mengatur
“titik-titik” LCD tadi menjadi huruf atau angka yang terbaca.
Huruf atau angka yang akan ditampilkan dilirim ke LCD dalam bentuk
kode ASCII, kode ASCII ini diterima oleh mikrokontroler di dalam LCD menjadi
“titik-titik” LCD yang terbaca sebagai huruf satu angka. Dengan demikian tugas
mikrokontroler pemakai LCD hanyalah mengirimkan kode-kode ASCII untuk
ditampilkan. [ 14 ]
2.10. IC LM 358
Pada rangkaian sensor infra merah digunakan IC LM 358 yang merupakan
IC penguat operasi (Op-Amp) yang difungsikan sebagai sebuah pembanding
(komparator). IC ini akan dibandingkan tegangan reverse pada photodiode yang
di umpamakan pada masukan tak membalik (non-inverting) dengan tegangan
referensi yang diumpankan pada masukan membalik (inverying) IC tersebut, saat
terhalang maupun pada saat tak terhalang. Pada rangkaian sensor infra merah
digunakan IC LM 358 yang merupakan IC penguat operasi (Op-Amp) yang
2.11. Auto Feeder
Auto Feeder merupakan alat pemberi makan pada ikan secara otomatis
untuk akuarium. Alat ini sangat cocok untuk seseorang yang tidak bisa memberi
makan secara tepat waktu. Selain itu alat ini juga tergolong murah harganya, alat
ini juga dapat membantu meringankan pekerjaan kita dalam pemberian pakan
pada ikan. Pada Auto Feeder ini juga terdapat palet yang cukup bagus dan
penggunaan interval waktu yang cukup baik. Banyak sedikit pemberian pakan
dapat kita tentukan sendiri dengan mengatur waktu pemberian pakan dan
menentukan banyak sedikitnya porsi pakan yang akan diberikan. Cara mengatur
banyak sedikitnya porsi makan dapat kita tentukan pada besar bukaan. [ 2 ]
2.12. Motor DC
Motor DC adalah alat yang mengubah pulsa listrik menjadi gerak,
mempunyai prinsip dasar yang sama dengan motor stepper namun gerakannya
bersifat kontinyu atau berkelanjutan. Motor DC dibagi menjadi 2 jenis yaitu :
1. Motor DC dengan sikat (mekanis komutasi), yaitu motor yang memiliki sifat
karbon berfungsi sebagai pengubah arus pada kumparan sedemikian rupa
sehingga arah tenaga putaran motor akan selalu sama.
2. Motor DC tanpa sikat, menggunakan semi konduktor untuk merubah
maupum membalik arus sehingga layaknya pulsa yang menggerakkan motor
tersebut. Biasa digunakan pada sistem servo, karena mempunyai efisiensi
tinggi, umur pemakaian lama, tingkat kebisingan suara listrik rendah, karena
putarannya halus seperti stepper namun putarannya terus menerus tanpa
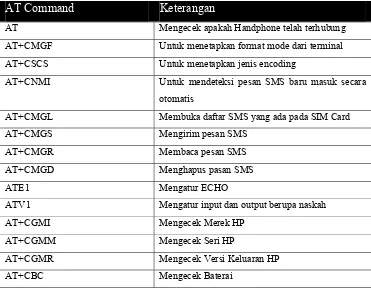
Dalam aplikasinya seringkali sebuah motor digunakan untuk arah yang
searah dengan jarum jam maupun sebaliknya. Untuk mengubah putaran dari
sebuah motor dapat dilakukan dengan mengubah arah arus yang mengalir melalui
motor tersebut. Hal ini dapat dilakukan hanya dengan mengubah polaritas
tegangan motor, dapat dilihat pada Gambar 2.5 :
Gambar 2.5 Dasar Pengaturan Arah Putar Motor
Agar pengubahan polaritas tegangan motor dapat dilakukan dengan
mudah, maka hal ini dilakukan dengan menggunakan dua buah saklar seperti pada
Gambar 2.6. di mana kedua saklar tersebut harus berada pada posisi yang saling
berlawanan. Apabila S1 berada di posisi kiri (terhubung dengan positif) maka S2
harus berada di posisi kanan (terhubung dengan negatif) dan demikian pula
sebaliknya dengan perubahan yang serempak.
Gambar 2.6 Pengaturan Arah Dengan Menggunakan Saklar
2.13. ADC ADS 7822
Merupakan sebuah piranti yang dirancang untuk mengubah sinyal-sinyal
analog menjadi sinyal – sinyal digital. Hal-hal yang juga perlu diperhatikan dalam
penggunaan ADC ini adalah tegangan maksimum yang dapat dikonversikan oleh
ADC dari rangkaian pengkondisi sinyal, resolusi, pewaktu eksternal ADC, tipe
keluaran, ketepatan dan waktu konversinya.
Beberapa karakteristik penting ADC :
1. Waktu konversi
2. Resolusi
3. Bukan Linier
4. Akurasi
Ada banyak cara yang dapat digunakan untuk mengubah sinyal analog
menjadi sinyal digital yang nilainya proposional. Jenis ADC yang biasa
digunakan dalam perancangan adalah jenis successive approximation convertion
atau pendekatan bertingkat yang memiliki waktu konversi jauh lebih singkat dan
tidak tergantung pada nilai masukan analognya atau sinyal yang akan diubah.
Secara singkat prinsip kerja dari konverter A/D adalah semua bit-bit diset
kemudian diuji, dan bilamana perlu sesuai dengan kondisi yang telah ditentukan.
Dengan rangkaian yang paling cepat, konversi akan diselesaikan sesudah 8 clock,
dan keluaran D/A merupakan nilai analog yang ekivalen dengan nilai register
Apabila konversi telah dilaksanakan, rangkaian kembali mengirim sinyal
selesai konversi yang berlogika rendah. Sisi turun sinyal ini akan menghasilkan
data digital yang ekivalen ke dalam register buffer. Dengan demikian, keluaran
digital akan tetap tersimpan sekalipun akan di mulai siklus konversi yang baru. [6]
2.14. Air Pump
Pompa udara (air pump) yang sering juga disebut blower atau aerator
sebenarnya merupakan salah satu alat yang sangat vital peranannya dalam
pemeliharaan ikan dalam akuarium. Ikan memerlukan oksigen untuk
melangsungkan kehidupannya, sehingga kandungan oksigen dalam air menjadi
hal yang begitu penting.
Besar kecilnya konsumsi oksigen dalam komunitas air ditentukan oleh
banyak sedikitnya mahluk hidup dalam air tersebut. Dalam hal ini tidak hanya
binatang atau hewan peliharaan kita saja yang mengkonsumsi oksigen tetapi
semua atau seluruh mahluk hidup yang hidup didalam komunitas tersebut.
Sebagai contoh dalam kolam koi, yang mengkonsumsi oksigen tidak hanya ikan
koi, ada berbagai jenis bakteri yang juga mengkonsumsi oksigen, terutama
berbagai macam bakteri pengurai yang tumbuh di dalam system filter biologi, dan
juga berbagai jazat renik lainya, termasuk beberapa parasite, baik yang
menguntungkan atau merugikan.
Jadi perhitungan penggunaan kapasitas pompa udara memang bersifat
salah satu elemen dasar dalam perhitungan penggunaan pompa udara, yaitu dari
segi konsumsi udara saja sudah cukup rumit dan sangat sulit untuk dapat
diperhitungkan secara matematis.
Selain dari faktor konsumsi udara ada beberapa elemen lain yang sangat
mempengaruhi pemilihan kapasitas pompa udara yang sesuai.Sama halnya dengan
perhitungan kapasitas pompa air, jalur distribusi udara dari pompa sampai pada
pelepasan akhir juga sangat berpengaruh, termasuk pemilihan air stone ( batu
aerasi, bubble makers, batu pemberat selang udara ) yang ideal dan berkualitas.
Air stone yang baik adalah air stone yang mampu melepas udara dalam air
dengan tekanan udara yang rendah agar dapat menjaga pompa udara dapat bekerja
secara maksimal, serta mempunyai bidang pelepasan udara yang luas sehingga
dapat memberikan asupan oksigen yang maksimal pada air mengingat adanya
batasan kemampuan penyerapan oksigen dalam air. [ 7 ]
2.15. Relay
Relay sebagai salah satu onderdil elekronik, sering dipakai
dalam kontrol switching beberapa alat, Relay itu sendiri terdiri dari coil dan dan
beberapa kaki elektroda yang menjadi obyek kontrol jalannya arus listrik.
Diujing coil ada plat konduktor yang berfungsi untuk mengatur
jalur arus listrik terhadap keperluan kontrol tsb. Plat konduktor
elektromagnet yang terjadi pada coil karena adanya tegangan
kontrolyang bekerja pada coil. [ 10 ]
2.16. RS 232 MAX 232
RS-232 mempunyai standar tegangan yang berbeda dengan serial port
mikrokontroler, sehingga agar sesuai dengan RS-232 maka di butuhkan suatu rangkaian level converter, IC yang digunakan bermacam-macam, tetapi yang
Pada Bab ini akan dibahas mengenai beberapa hal dasar tentang bagaimana perancangan Sistem Pengendalian Akuarium dan Pemberian Pakan Ikan Secara Otomatis Berbasis SMS ini dirancang, komponen - komponen apa saja yang dibutuhkan dalam perancangan Sistem Pengendalian Akuarium dan Pemberian Pakan Ikan Secara Otomatis Berbasis SMS ini, bagaimana cara merancang Sistem Pengendalian Akuarium dan Pemberian Pakan Ikan Secara Otomatis Berbasis SMS ini, Flowchart Sistem Pengendalian Akuarium dan Pemberian Pakan Ikan Secara Otomatis Berbasis SMS, Blok Diagram Hardware Sistem Pengendalian Akuarium dan Pemberian Pakan Ikan Secara Otomatis Berbasis SMS dan Analisis setelah Sistem Pengendalian Akuarium dan Pemberian Pakan Ikan Secara Otomatis Berbasis SMS itu dibuat.
3.1 Perancangan Sistem Pengendalian Akuarium dan Pemberian Pakan
Ikan Secara Otomatis Berbasis SMS
Dalam pembuatan Sistem Pengendalian Akuarium dan Pemberian Pakan Ikan Secara Otomatis Berbasis SMS ini penulis memperhatikan beberapa aspek yang dibutuhkan, yaitu :
tersebut. Serta Sistem Pengendalian Akuarium dan Pemberian Pakan Ikan Secara Otomatis Berbasis SMS ini dapat dapat digunakan dimana saja, karena untuk mengendalikannya cukup dengan SMS ke no HP yang digunakan pada mikrokontroler.
2. Sistem Pengendalian Akuarium dan Pemberian Pakan Ikan Secara Otomatis Berbasis SMS ini digunakan pada ruang budidaya tertentu yaitu akuarium. 3. Sistem Pengendalian Akuarium dan Pemberian Pakan Ikan Secara Otomatis
Berbasis SMS ini dirancang dengan kemampuan hanya dapat mengendalikan suhu, ketinggian air, pengurasan air, dan auto feeder. Tidak dapat melakukan hal berat lainnya seperti mengendalikan kejernihan air dan PH air.
4. Sistem Pengendalian Akuarium dan Pemberian Pakan Ikan Secara Otomatis Berbasis SMS ini dirancang dengan menggunakan sensor suhu LM35 dan sensor ketinggian air dengan Mikrokontroler AT89S52 sebagai pengendali utama pada Sistem Pengendalian Akuarium dan Pemberian Pakan Ikan Secara Otomatis Berbasis SMS.
5. Sistem Pengendalian Akuarium dan Pemberian Pakan Ikan Secara Otomatis Berbasis SMS ini menggunakan IC LM358 sebagai sensor suhu.
6. Sistem Pengendalian Akuarium dan Pemberian Pakan Ikan Secara Otomatis Berbasis SMS ini menggunakan RTC DS1307 yang digunakan untuk mengendalikan waktu.
8. Sistem Pengendalian Akuarium dan Pemberian Pakan Ikan Secara Otomatis Berbasis SMS ini menggunakan HP Siemens tipe C55 yang digunakan untuk menghubungkan perintah ke mikrokokntroller.
9. Sistem Pengendalian Akuarium dan Pemberian Pakan Ikan Secara Otomatis Berbasis SMS ini menggunakan sensor ketinggian air untuk mengetahui tinggi rendahnya air yang ada pada akuarium.
10. Sistem Pengendalian Akuarium dan Pemberian Pakan Ikan Secara Otomatis Berbasis SMS ini menggunakan LCD Dot Matrik untuk menampilkan tulisan berupa angka atau huruf sesuai dengan yang diinginkan (sesuai dengan program
yang digunakan untuk mengontrolnya).
3.2 Flowchart Dari mikrokontroler AT89S52 ke HP Siemens C55
Baca Feed Timer dan Pump Timer dari RTC
Time Set Feed Time T
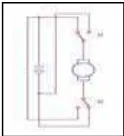
Gambar 3.1 Flowchart Sistem Pengendalian Akuarium dan Pemberian
Pada Gambar 3.1 Flowchart Sistem Pengendalian Akuarium dan Pemberian Pakan Ikan Secara Otomatis Berbasis SMS :
1. Pertama dimulai akan memproses inisialisasi timer, serial dan memory, memproses inisialisasi LCD, memproses inisialisasi pengaturan HP, memproses inisialisasi RTC (DS1307).
2. Lalu ke data tampilan awal, membaca suhu dari ADC dan membaca feed timer dan pump timer dari RTC.
3. Kemudian jika feed timer = feed time maka relay feed time akan on selama
relay feed time dan diproses dimana feed time = Ø dan mengirim SMS Temp
dan Pump OK ke pump timer. Jika tidak maka ke pilihan selanjutnya yaitu
pump timer = pump time.
4. Jika pump timer = pump time maka relay pump out on dan jika tidak ke pilihan selanjutnya tekan tombol 1.
5. Dari relay pump out on ke pilihan LS UP = Off dan LS Down = Off, jika ya maka ke relay pump in on dan relay pump out off dan jika tidak kembali ke
relay pump out on.
6. Dari relay pump in on dan relay pump out off ke pilihan LS UP = On dan LS
Down = On, jika ya maka relay pump in off lalu diproses pump timer = Ø dan
mengirim data SMS Temp dan Pump OK ke pump time = pump timer. Dan jika tidak kembali ke pump in on dan relay pump out off.
8. Jika tombol 2 ditekan maka relay feed on selama relay feed time dan diproses dimana feed time = Ø dan mengirim SMS Temp dan Pump OK ke pump timer. Jika tidak maka ke pilihan selanjutnya yaitu tekan tombol 3.
9. Jika tombol 3 ditekan maka relay pump out on dan jika tidak ke pilihan selanjutnya yaitu data dari HP.
10.Dari relay pump out on ke pilihan LS UP = Off dan LS Down = Off, jika ya maka ke relay pump in on dan relay pump out off dan jika tidak kembali ke
relay pump out on.
11.Dari relay pump in on dan relay pump out off ke pilihan LS UP = On dan LS
Down = On, jika ya maka relay pump in off lalu diproses pump timer = Ø dan
mengirim data SMS Temp dan Pump OK ke pump time = pump timer. Dan jika tidak kembali ke pump in on dan relay pump out off.
12.Jika memilih data dari HP maka akan langsung ke command FT, jika tidak maka akan ke pilihan selanjutnya yaitu suhu > set temp.
13.Jika memilih command ‘FT’ akan langsung diproses ke set feed time kemudian menuju command ‘PT’, jika tidak maka langsung menuju command ‘PT’.
14.Jika memilih command ‘PT’ maka akan langsung diproses ke set pump time kemudian menuju command ‘VT’, jika tidak maka akan langsung menuju
command ‘VT’.
15.Jika memilih command ‘VT’ maka akan langsung diproses ke set relay feed
time kemudian menuju ke command ‘ST’, jika tidak maka akan langsung
16.Jika memilih command ‘ST’ maka akan langsung diproses ke set time
threshold kemudian menuju command ‘SF’, jika tidak maka akan langsung
menuju command ‘SF’.
17.Jika memilih command ‘SF’ maka akan langsung diproses ke set feed timer kemudian menuju command ‘SP’, jika tidak maka akan langsung menuju
command ‘SP’.
18. Jika memilih command ‘SP’ maka akan langsung diproses ke set pump timer
kemudian menuju command ‘Feed’, jika tidak maka akan langsung menuju
command ‘Feed’.
19.Jika memilih command ‘Feed’ maka akan menuju relay feed on selama relay
feed time dan langsung di proses dimana feed timer = Ø, kemudian mengirim
data Temp dan Pump OK melalui SMS ke pump timer = pump time. Jika tidak maka akan langsung menuju command ‘Pump’.
20.Jika memilih command ‘Pump’ maka akan menuju relay pump out on, jika tidak maka akan ke pilihan selanjutnya yaitu suhu > set temp.
21. Dari relay pump out on ke pilihan LS UP = Off dan LS Down = Off, jika ya maka ke relay pump in on dan relay pump out off dan jika tidak kembali ke
relay pump out on.
22.Dari relay pump in on dan relay pump out off ke pilihan LS UP = On dan LS
Down = On, jika ya maka relay pump in off lalu diproses pump timer = Ø dan
mengirim data SMS Temp dan Pump OK ke pump time = pump timer. Dan jika tidak kembali ke pump in on dan relay pump out off.
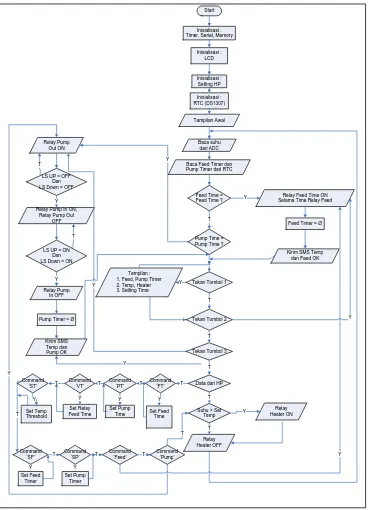
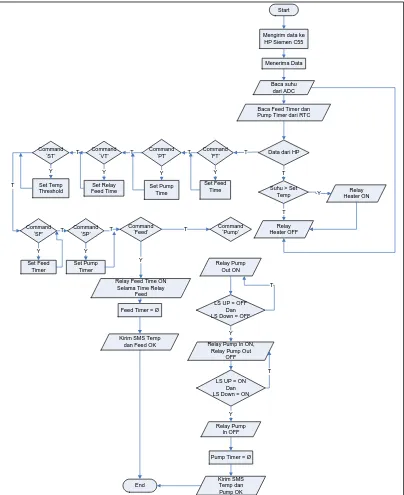
Flowchart SMS
Feed Time Set Pump Time
Set Feed
Baca Feed Timer dan Pump Timer dari RTC
Pada Gambar 3.2 Flowchart SMS :
1. Pertama dimulai memproses pengiriman data HP siemens C55. 2. Memproses penerimaan data di HP siemens C55 dari HP lain. 3. Membaca suhu dari ADC.
4. Lalu membaca Feed Timer dan Pump Timer dari RTC.
5. Setelah itu dilanjutkan ke pilihan data dari HP, jika ya maka lanjut ke
command FT, jika tidak ke suhu > set temp.
6. Jika memilih data dari HP maka akan langsung ke command FT, jika tidak maka akan ke pilihan selanjutnya yaitu suhu > set temp.
7. Jika memilih command ‘FT’ akan langsung diproses ke set feed time kemudian menuju command ‘PT’, jika tidak maka langsung menuju command ‘PT’.
8. Jika memilih command ‘PT’ maka akan langsung diproses ke set pump time kemudian menuju command ‘VT’, jika tidak maka akan langsung menuju
command ‘VT’.
9. Jika memilih command ‘VT’ maka akan langsung diproses ke set relay feed
time kemudian menuju ke command ‘ST’, jika tidak maka akan langsung
menuju command ‘ST’.
10.Jika memilih command ‘ST’ maka akan langsung diproses ke set time
threshold kemudian menuju command ‘SF’, jika tidak maka akan langsung
menuju command ‘SF’.
11.Jika memilih command ‘SF’ maka akan langsung diproses ke set feed timer kemudian menuju command ‘SP’, jika tidak maka akan langsung menuju
12.Jika memilih command ‘SP’ maka akan langsung diproses ke set pump timer kemudian menuju command ‘Feed’, jika tidak maka akan langsung menuju
command ‘Feed’.
13.Jika memilih command ‘Feed’ maka akan menuju relay feed on selama relay
feed time dan langsung di proses dimana feed timer = Ø, kemudian mengirim
data SMS jika Temp dan Pump OK lalu selesai.
14.Jika memilih command ‘Pump’ maka akan menuju relay pump out on, jika tidak maka akan ke pilihan selanjutnya yaitu suhu > set temp.
15. Dari relay pump out on ke pilihan LS UP = Off dan LS Down = Off, jika ya
maka ke relay pump in on dan relay pump out off dan jika tidak kembali ke
relay pump out on.
16.Dari relay pump in on dan relay pump out off ke pilihan LS UP = On dan LS
Down = On, jika ya maka relay pump in off lalu diproses pump timer = Ø dan
mengirim data SMS jika Temp dan Pump OK lalu selesai.
3.3 Blok Diagram
Gambar 3.3 Hardware Sistem Pengendalian Akuarium dan Pemberian
Pakan Ikan Secara Otomatis Berbasis SMS
Feeder dibutuhkan suatu penghubung ke mikrokontroler AT89S52 yaitu Relay,
Food Feeder ini merupakan alat pemberian pakan ikan secara otomatis. Pada
pemakaian Pompa kuras air dan Pompa isi air dibutuhkan suatu penghubung ke mikrokontroler AT89S52 yaitu relay, pompa kuras air dan pompa isi air ini digunakan untuk menguras dan mengisi air yang ada pada akuarium.
3.4Kebutuhan Perancangan Hardware Sistem Pengendalian Akuarium dan
Pemberian Pakan Ikan Secara Otomatis Berbasis SMS
Dalam pembuatan robot ini komponen-komponen yang dibutuhkan adalah sebagi berikut:
1. Akuarium
2. Mikrokontroler AT89S52
3. LCD Dot Matrik 4. Sensor Suhu LM35 5. Sensor Ketinggian Air 6. Heater
7. Auto Feeder
8. HP Siemens tipe C55 9. RTC DS1307
10.IC LM358 11.Motor DC
12.Baterry Lithium 3V CR 2032
13.ADC ADS 7822
3.5Cara Merancang Sistem Pengendalian Akuarium dan Pemberian Pakan
Ikan Secara Otomatis Berbasis SMS
memaparkan bagaimana cara merancang Sistem Pengendalian Akuarium dan Pemberian Pakan Ikan Secara Otomatis Berbasis SMS ini.
Pertama, membeli semua komponen-komponen yang diperlukan dalam
pembuatan Sistem Pengendalian Akuarium dan Pemberian Pakan Ikan Secara Otomatis Berbasis SMS ini. Setelah membeli semua komponennya, kemudian mendesign Sistem Pengendalian Akuarium dan Pemberian Pakan Ikan Secara Otomatis Berbasis SMS nya sesuai dengan keperluan dan kebutuhan user.
Kedua, setelah mendesign Sistem Pengendalian Akuarium dan Pemberian
Pakan Ikan Secara Otomatis Berbasis SMS, kemudian merakit komponen-komponen yang sudah ada ke PCB (Printed Circuit Board). Setelah itu untuk menyatukan rangkaian komponen dan akuarium.
Ketiga, untuk menyalakan Sistem Pengendalian Akuarium dan Pemberian
Pakan Ikan Secara Otomatis Berbasis SMS ini diperlukan listrik dan sebuah battery litium 3V CR 3020 yang digunakan oleh ADC ADC 7288 untuk membaca suhu.
Keempat, untuk mengubah perintah dapat dilakukan dengan cara
Kelimat, untuk menghubungkan CPU ke Sistem Pengendalian Akuarium
dan Pemberian Pakan Ikan Secara Otomatis Berbasis SMS maka digunakan
pararel port.
3.6Analisis Perancangan koneksi HP Siemens Tipe C55 Ke Mikrokontroler
AT89S52
HP siemens tipe C55 merupakan satu bagian terpenting dalam merancang sebuah Sistem Pengendalian Akuarium dan Pemberian Pakan Ikan Secara Otomatis Berbasis SMS. HP siemens tipe C55 ini mempunyai peran yang penting, disamping sebagai alat untuk menerima perintah melalui SMS, HP siemens tipe C55 ini juga digunakan sebagai alat untuk mengirim informasi ke nomor HP tertentu. Maka dari hasil dan analisis, sistem ini dapat di kendalikan dari jarak jauh. Karena untuk mengendalikannya cukup dilakukan melalui SMS. Jadi jika ingin mengubah pengaturan cukup dengan memberikan perintah yang di kirim melalui SMS ke nomor HP siemens tipe C55, maka perintah tersebut akan langsung dihubungkan ke mikrokontroler AT89S52 dengan bantuan RS 232 Max 232. Kemudian perintah tersebut langsung dikerjakan, hasil dari pengerjaan tersebut dikirim mikrokontroler AT89S52 ke HP siemens tipe C55 lalu informasi tersebut akan dikirim ke nomor HP tertentu yang telah ditetapkan untuk menerima informasi tersebut.
Macam-macam perintah SMS ke HP siemens tipe C55 :
1. Set feeding period : FTXX
XX = dalam jam, misal FT08 (pemberian makan tiap 8jam sekali)
XXX = dalam jam, misal PT072 (Pengurasan tiap 72 jam sekali)
3. Set valve open delay : VTXX
XX = dalam detik, misal VT20 (valve makanan membuka selama 20 detik)
4. Set feeding timer : SFhhmmss
hh = dalam jam mm = dalam menit ss = dalam detik
Untuk mengeset timer pumping sekarang, misal SP033000 (timer pumping sudah berjalan selama 3 jam 30 menit).
5. Do feeding now : FEED
Melakukan proses feeding sekarang.
6. Do pumping now : PUMP
Melakukan proses pumping sekarang. Semua command ditulis dalam huruf besar.
3.7Rancangan dan Analisis Sistem Pengendalian Akuarium dan Pemberian
Pakan Ikan Secara Otomatis Berbasis SMS
Berikut ini adalah cara kerja mekanik yang terdapat pada robot saat dijalankan.
3.7.1 Rancangan Sensor Suhu
diperkuat dengan sensor suhu IC LM358 yang digunakan untuk mengetahui informasi suhu yang pada akuarium.
Gambar 3.4 Sensor suhu LM35
Gambar 3.5 Sensor suhu IC LM 358
3.7.2 Rancangan Pompa pengurasan Air dan Pompa Pengisian Air
Pada pembuatan Sistem Pengendalian Akuarium dan Pemberian Pakan Ikan Secara Otomatis Berbasis SMS ini digunakan pompa pengurasan air dan pompa pengisian air untuk menjaga kejernian air yang ada pada akuarium. Pengurasan dan pengisian air pada akuarium ini dapat dilakukan 3 hari sekali.
3.7.3 Rancangan Feeding
memberi Pakan dan berapa banyak porsi yang akan di berikan pada ikan peliharaan kita. Cara untuk mengatur banyak sedikitnya porsi Pakan dapat kita tentukan pada besar bukaan. Alat ini sangat cocok untuk seseorang yang tidak bisa memberi Pakan secara tepat waktu.
3.7.4 Rancangan koneksi mikrokontroler ke Hand Phone
Untuk mengoneksikan mikrokontroler AT89S52 ke hand phone dibutuhkan suatu hand phone. HP yang digunakan adalah Siemens tipe C55, HP ini tidak dapat langsung terkoneksi ke mikrokontroler. Untuk itu dibutuhkan RS 232 Max 232 yang digunakan untuk menghubungkan HP ke mikrokontroler.
3.8Rancangan Komponen Sistem Pengendalian Akuarium dan Pemberian
Pakan Ikan Secara Otomatis Berbasis SMS
Gambar 3.6 Rancangan Komponen PCB
3.8.1 Mikrokontroler AT89S52
Mikrokontroler itu sendiri merupakan chip yang berfungsi sebagai control utama pada Sistem Pengendalian Akuarium dan Pemberian Pakan Ikan Secara Otomatis Berbasis SMS yang saya buat.
3.8.2 ADC ADS 7822
Suatu rangkaian yang digunakan untuk menghubungkan sensor suhu LM35 yang di perkuat dengan sensor suhu IC LM358 ke mikrokontroler AT89S52 dan digunakan untuk membaca suhu yang ada pada akuarium.
3.8.3 Battery Litium 3V CR 2032
3.8.4 Sensor Suhu IC LM358
Merupakan alat yang digunakan sebagai penguat sensor suhu LM35 dalam mengukur tinggi rendahnya suhu yang ada pada akuarium
3.8.5 Sensor Suhu LM35
Merupakan alat yang digunakan untuk mengukur tinggi rendahnya suhu yang ada pada akuarium.
3.8.6 RS 232 MAX 232
Merupakan suatu rangkaian yang digunakan untuk menghubungkan HP siemens C55 ke mikrokontroll AT89S52.
3.8.7 HP Siemens C55
HP siemens C55 ini digunakan untuk memberikan perintah ke mikrokontroler dan menerima informasi dari mikrokontroler.
3.8.8 RTC DS 1307
3.8.9 LCD 16 x 2
LCD ini merupakan suatu alat yang digunakan untuk membaca huruf atau angka sesuai dengan kebutuhan. Pada sistem ini LCD dot matrik ini digunakan untuk membaca informasi suhu, pump, auto feeder dan heater.
3.8.10 Level Sensor Atas
Level sensor atas digunakan untuk mengetahui batas atas air yang ada pada akuarium.
3.8.11 Level Sensor Bawah
Level sensor atas digunakan untuk mengetahui batas bawah air yang ada pada akuarium.
3.8.12 Relay
Suatu rangkaian yang digunakan sebagai penghubung dari mikrkontroller dan ke mikrokontroler.
3.8.13 Heater 100W
Digunakan untuk menetralkan suhu air pada akuarium.
3.8.14 Food Feeder
3.8.15 Pompa Kuras Air
Digunakan untuk menguras air yang ada pada akuarium, dan biasanya dilakukan selama 3 kali sehari.
3.8.16 Pompa Isi Air
Digunakan untuk mengisi air ke akuarium setelah dilakukan pengurasan pada akuarium.
3.8.17 Air Pump
4.1 Kebutuhan Sistem
Ada beberapa hal dalam pengembangan sistem yang harus diperhatikan sebelum akhirnya sampai pada langkah menjalankan program, antara lain perangkat keras (hardware), perangkat lunak (software) serta bagaimana akhirnya sistem dapat berjalan sesuai dengan program yang telah dibuat.
Perangkat yang dibutuhkan dalam pembuatan robot pengikut cahaya dengan menggunakan sensor LDR (Light Dependent Resistor) ini termasuk dalam pembuatan laporan adalah perangkat keras (hardware) dan perangkat lunak (software).
Adapun perangkat keras yang digunakan dalam pengembangan sistem ini adalah: 1. Laptop intel pentium dual-core 2.0 Ghz
2. RAM 512 Mb 3. Hard Disk 80 Gb
Sedangkan perangkat lunak yang digunakan adalah Eassy Assembler Versi 1.0.
4.2 Prosedur Pemasangan
Ada beberapa cara yang harus dilakukan sebelum program dibuat dan dimasukkan kedalam chip sistem, yaitu :
2. Setelah selesai menginstal maka tahap selanjutnya adalah pembuatan program yang akan dimasukkan ke dalam chip Sistem.
Gambar 4.1 Pembuatan Program pada Easy Assembler Versi 1.0
Gambar 4.2 Check Program
Gambar 4.3 Error Program
5. Jika dalam program tidak terdapat kesalahan atau error terlebih kita compile program sebelum kita masukkan kedalam chip sistem, kita dapat memilih menu yang sudah ada pada aplikasi tersebut untuk meng-compile.
4.3 Implementasi
Pada tahapan ini akan dibahas mengenai implementasi sistem dari perancangan sistem yang telah dibahas sebelumya.
Berikut adalah gambar kompenen-komponen yang telah di rakit pada PCB.
Gambar 4.4 Rangkaian Pada PCB
4.3.1 Implementasi Perangkat Keras
Merupakan suatu tampilan perangkat keras dari sistem ini, berikut ini adalah gambar Sistem Pengendalian Akuarium dan Pemberian Pakan Ikan Secara Otomatis Berbasis SMS yang telah dirangkai dan disatukan dengan motor DC.
Gambar 4.5 Sistem Pengendalian Akuarium dan Pemberian Pakan Ikan Secara
Gambar 4.6 Sistem Pengendalian Akuarium dan Pemberian Pakan Ikan Secara
Otomatis Berbasis SMS Sistem Pengikut Cahaya Tampak Dari Belakang
4.3.2. Implementasi Program
Merupakan perintah yang digunakan pada sebuah program, macam-macam perintah tersebut :
1. Untuk mengatur waktu pemberian pakan ikan dalam hitungan jam TFeedDef_C EQU 8
2. Untuk mengatur waktu pergantian air dalam hitungan jam TPumpDef_C EQU 72
3. Untuk mengatur berapa lama auto feeder berputar dalam hitungan detik TValveDef_C EQU 03
5. Menerima serial UART dari HP
SETB LCDCS_P
8. Melakukan inisialisasi LCD dengan interface 4 bit
9. Melakukan delay setelah pengiriman data ke LCD LCD_Delay_Data
Pop 6 Pop 7 RET
11.Menampilkan text pada LCD dari posisi kursor terakhir Write_Text
WT_J2 LCALL LCD_Write_Data
INC dptr
SJMP WT_J1
WT_J3 POP a
RET
12.Menghapus seluruh tampilan pada LCD Clr_Screen
SETB f0
POP a
POP dpl
POP dph
RET
CSIMCmdJ2 CJNE a,b,CSIMCmdJ3
INC dptr
14.Menganalisis status HP Init_HP
MOV dptr,#SetEchoOff_T
ACALL Send_text_TX
MOV dptr,#EchoOff_C
ACALL Send_Text_SIM
JNB SrValid_F,$
CLR SrValid_F
ACALL Send_Buffer
MOV SrCtr_M,#0
CPL LED_P
MOV dptr,#SetSMSMode_T
ACALL Send_Text_TX
MOV dptr,#SMSMode_C ; set command syntax GSM 3.4x + phase 2+
JNB SrValid_F,$
MOV dptr,#SMSFormat_C ; set SMS format = PDU
ACALL Send_Buffer
15.Memberi pakan pada ikan Do_Feeding
17.Menentukan panjang karakter untuk no HP
Phone_C DB 13
18. Penulisan no HP, tidak boleh menggunakan tanda “+” DB '6285730515185'
19.Penerimaan pesan baru
SMSAlert_C DB 'AT+CNMI=1,2,0,0,1',13,10,0
20.Proses pengiriman pesan dan pembacaan pesan SendSMS_C DB 'AT+CMGS=',0
21.Mengontrol panggilan masuk HangUp_C DB 'ATH',13,10,0
22.Mengirim informasi setelah melakukan feeding FeedingOK_SMS DB 17,'Feeding OK, T: C',0
23.Mengirim informasi setelah melakukan pumping PumpingOK_SMS DB 17,'Pumping OK, T: C',0
24.Untuk mengatur berapa lama auto feeder akan berputar SetVT_Cmd DB 'VT',0
25.Mengatur Suhu
SetST_Cmd DB 'ST',0
26.Mengatur waktu pemberian pakan ikan SetSF_Cmd DB 'SF',0
28.Memberikan pakan ikan sekarang Feed_Cmd DB 'FEED',0
5.1 Pendahuluan
Pada bab ini akan dibahas mengenai pengujian dan analisis pada hardware yang telah dirancang. Tujuan dari pengujian dan analisis ini adalah untuk mengetahui apakah hardware tersebut telah berfungsi dengan benar dan sesuai rencana atau tidak. Pengujian dan analisis ini ditujukan pada pengujian komponen-komponen yang terdapat pada Sistem Pemberian Pakan Ikan Secara Otomatis Berbasis SMS serta pengujian Sistem Pengendalian Akuarium dan Pemberian Pakan Ikan Secara Otomatis Berbasis SMS itu sendiri.
5.2 Pengujian Alat
Berikut ini adalah pengujian alat atau komponen yang terdapat Sistem Pengendalian Akuarium dan Pemberian Pakan Ikan Secara Otomatis Berbasis SMS.
5.2.1 Pengujian Mikrokontroller AT89S52
5.2.2 Pengujian Sensor Suhu LM35 dan Sensor Suhu IC LM 358
Untuk menguji sensor suhu LM35 dan sensor suhu LM358 yaitu dengan cara mengirim perintah melalui SMS ke mikrokontroller AT89S52 yang hubungkan melalui HP siemens tipe C55.
Maka perintah tersebut akan langsung dikerjakan dengan cara mendeteksi berapa suhu yang ada pada air tersebut. Jika suhu < 26° maka heater akan nyala dan jika suhu > 26 ° maka heater akan mati. Heater ini digunakan untuk menetralkan suhu yang ada pada akuarium. Jika sudah diketahui berapa suhu yang ada pada akuarium tersebut, maka mikrokontroller akan mengirimkan informasi tersebut ke HP siemens tipe C55 yang kemudian secara otomatis informasi tersebut dikirim ke nomor HP tertentu melalui SMS.
5.2.3 Pengujian sensor ketinggian
Untuk menguji sensor ketinggian dapat dilakukan dengan cara mengirim perintah melalui SMS ke mikrokontroller AT89S52 yang hubungkan melalui HP siemens tipe C55.
5.2.4 Pengujian Auto Feeder
Untuk menguji auto feeder dapat dilakukan dengan memberikan perintah untuk memberi pakan pada ikan. Waktu pemberian pakan, berapa kali feed berputar, dan banyak porsi pakan yang diberikan dapat ditentukan sendiri dengan cara mengaturnya dengan cara menulis perintah SMS ke mikrokontroller AT89S52 melalui HP siemens tipe C55. untuk pemberian banyak sedikitnya porsi pakan yang diberikan dapat ditentukan dengan cara membuka lebar bukaan pada tempat pakan.
Saat mengirim perintah SMS ke HP siemens tipe C55 maka perintah tersebut langsung dikirim ke mikrokontroller AT89S52 dan perintah dari SMS tersebut langsung dikerjakan. Setelah perintah dikerjakan maka mikrokontroller AT89S52 akan mengirim informasi ke HP siemens tipe C55 dan informasi tersebut dikirimkan nomor HP tertentu dalam bentuk SMS.
5.2.5 Pengujian alat secara keseluruhan
Tujuan pengujian alat secara keseluruhan untuk mendapatkan hasil dan data – data secara keseluran dari awal rangkaian Pengendalian Ruang Budidaya dan Pemberian Pakan Ikan Secara Otomatis Berbasis SMS pada sensor sampai bekerjanya sebuah perintah melalui SMS pada waktu Sistem Pengendalian Akuarium dan Pemberian Pakan Ikan Secara Otomatis Berbasis SMS dijalankan. Pengujian alat secara keseluruhan dapat dilakukan dengan adanya program yang telah tertanam pada mikrokontroller.
Pemberian Pakan Ikan Secara Otomatis Berbasis SMS dapat dikendalikan melalui Perintah SMS dengan cara mengirim SMS ke HP siemens tipe C55 dan dihubungkan mikrokntroller AT89C55, perintah yang dikirim tersebut akan langsung dikerjakan dan hasilnya akan berupa informasi dan dikirimkan ke mikrokontroller AT89S52 yang kemudian oleh mikrokontroller AT89S52 dikirim ke HP siemens tipe C55. Lalu dari HP ini informasi tersebut dikirimkan ke nomor HP yang telah ditetapkan untuk menerima informasi tersebut. Apabila sistem tidak bekerja sesuai dengan harapan, maka telah terjadi kesalahan pada sistem tersebut.
5.3 Pengujian Sistem Pengendalian Akuarium dan Pemberian Pakan
Ikan Secara Otomatis Berbasis SMS
Berikut ini akan ditunjukkan cara kerja Sistem Pengendalian Akuarium dan Pemberian Pakan Ikan Secara Otomatis Berbasis SMS dapat dikendalikan melalui Perintah SMS secara keseluruhan, dari memberikan perintah sampai menerima informasi.
Gambar 5.1 Perintah Untuk Mengatur Berapa Lama Auto Feeder
Untuk mengatur berapa lama auto feeder berputar, dapat ditentukan sendiri dengan cara mengirim SMS ke nomor HP siemens C55. Misal dengan mengetik perintah VT03, maksud dari perintah ini adalah auto feeder akan berputar selama 3 detik.
Gambar 5.2 Informasi Suhu dan Feeding telah dilakukan
Setelah melakukan feeding, maka mikrokontroller mengirim informasi jika feeding telah dijalankan ke HP siemens C55. Yang kemudian HP siemens C55 ini akan mengirimkan ke nomormor HP tertentu dalam bentuk SMS, yang berisi“
Feeding OK, T:26 C“. Feeding OK dan temparatur saat ini 26°.