BAB II
TEORI DASAR
2.1 Hukum
Gravitasi
Newton
Dasar teori yang digunakan dalam metode gayaberat adalah hukum Newton yang menyatakan bahwa gaya tarik menarik antara dua titik massa m1 dan m2 yang
dipisahkan oleh jarak r, menghasilkan persamaan sebagai berikut : r
r m m
Fr =γ 12 2 )
...
(2.
1) Medan gayaberat di titik m2 akibat titik massa m1 yang berjarak r adalah :2 1
r m
g =γ
...
(2.
2) Jika m1 diasumsikan sebagai massa bumi (Me) dan (Re) merupakan jarai-jari bumi,maka percepatan gayaberat dari suatu massa m2 di permukaan adalah :
2 e e R M g =γ
...
(2.3)dimana : = besar gaya tarik menarik (Newton)
γ
=
konstanta gravitasi (6,672 x 10־¹¹ N m² kg ־²) m1 = massa benda 1 (kg)m2 = massa benda 2 (kg)
r = jarak antara m1 dan m2
= vektor satuan dari m1 ke m2
g = percepatan gayaberat Fr
2.2
Satuan gayaberat
Percepatan gayaberat bumi secara umum antara 9.78 hingga 9.83 m/s2 atau 978 hingga 983 cm/s2. Sebagai penghormatan kepada Galileo, unit c.g.s dari percepatan gayaberat ( 1 cm/s2 ) disebut sebagai Gal.
Konversi beberapa satuan sbb: g = 9.8 ms-2 1 Gal = 1 cms-2 = 10-2 ms-2 = 0.001 g 1 mGal = 10-3 Gal = 10-6 g 1 μGal = 10-3 mGal = 10-6 Gal = 10-8 ms-2 (SI)
2.3
Koreksi Data Gayaberat mikro 4D
Pembacaan gayaberat terhadap suatu titik di atas permukaan dipengaruhi oleh beberapa faktor, diantaranya akibat kesalahan sistematik alat, variasi topografi, variasi ketinggian, pasang surut, lintang dan variasi densitas bawah permukaan. Dari beberapa faktor tersebut, yang menjadi target utama adalah variasi densitas bawah permukaan, sehingga faktor-faktor lain yang terekam dalam pembacaan gayaberat perlu dihilangkan. Dengan kata lain nilai pembacaan gayaberat perlu dikoreksi terlebih dahulu, sehingga nilai gayaberat yang diukur benar-benar merepresentasikan anomali karena variasi densitas bawah permukaan. Untuk pengukuran gayaberat mikro 4D, koreksi yang dilakukan hanya dua, yaitu :
1) Koreksi Pasang Surut (Tide Correction)
Dilakukan untuk menghilangkan efek gayaberat benda-benda diluar bumi seperti matahari dan bulan. Karena nilai gayaberat dipermukaan bumi disamping disebabkan oleh adanya distribusi massa dan struktur yang ada di dalam dan permukaan bumi, juga dipengaruhi oleh adanya gaya tarik bumi dengan planet dan benda angkasa disekitarnya, dan yang paling signifikan yaitu efek bulan dan matahari. Perubahan nilai gayaberat secara periodik yang disebabkan oleh adanya perubahan kedudukan bumi terhadap matahari dan bulan disebut pasang surut gayaberat.
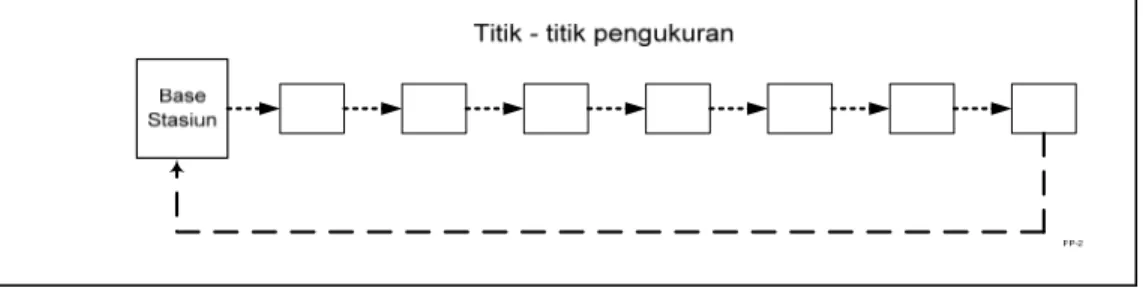
2) Koreksi Apungan (Drift Correction)
Koreksi drift adalah koreksi yang dilakukan sebagai akibat adanya perbedaan pembacaan gayaberat dari stasiun yang sama pada waktu berbeda yang disebabkan oleh adanya guncangan pada pegas (spring) alat tersebut selama proses transportasi dari satu stasiun ke stasiun lainnya. Untuk menghilangkan efek ini, maka pengambilan data gayaberat didesain dalam suatu rangkaian tertutup sehingga besarnya penyimpangan tersebut dapat diketahui dan diasumsikan linear pada selang waktu tertentu.
Persamaan untuk koreksi drift : ) ( 0 0 0 t t t t g g drift n t t − − − =
...………...
(2.4) dengan gt = pembacaan gravitimeter pada akhir loopingg0 = pembacaan gravitimeter pada awal looping
tt = waktu pembacaan pada akhir looping
t0 = waktu pembacaan pada awal looping
Kadir (2006) menyatakan bahwa anomali Bouguer akibat perubahan kontras rapat massa pada stasiun P untuk waktu t1 dan t2 diberikan oleh
) ( ) ( ) ( ) ( ) (t1 g t1 g ah t1 b h t1 c h t1 g = obs − + − + Δ Δ ϕ ρ ρ
....…….….……
(2.5) ) ( ) ( ) ( ) ( ) (t2 g t2 g ah t2 b h t2 c h t2 g = obs − + − + Δ Δ ϕ ρ ρ...…….…...
(2.6)dengan ∆g(t1) = anomali bouger pada t1
gobs(t1) = gayaberat observasi pada t1
gφ = gayaberat teoritis pada lintang φ
a = konstanta free-air b = konstanta bougeur
c = konstanta koreksi terrain h = elevasi
Dengan asumsi bahwa geometri reservoir tidak berubah selama selang waktu tertentu (pengukuran pertama dan kedua), maka semua koreksi yang terkait dengan elevasi yaitu koreksi Bouguer dan koreksi Terrain tidak perlu dilakukan karena pada periode pengambilan data pertama dan kedua elevasi tidak berubah. Koreksi yang dilakukan adalah koreksi yang terkait dengan pengukuran gayaberat yaitu koreksi apungan (drift) yang berasal dari alat dan koreksi pasang surut gayaberat (tide) yang disebabkan oleh pengaruh benda dari luar angkasa terutama bulan dan matahari.
Sehingga persamaan (2.5) dan (2.6) dapat ditulis : ) ( ) ( ) ( ) (t2 g t1 g t2 g t1 g −Δ = obs − obs Δ
……….………
(2.7)2.4
Gayaberat mikro 4D
Metode gayaberat mikro 4D adalah metode gayaberat dengan waktu sebagai dimensi yang keempatnya, sehingga kita dapat mengamati kemungkinan adanya perubahan rapat massa dan geometri (bentuk) sumber bawah permukaan sebagai fungsi x, y, z dan t. Anomali gayaberat mikro 4D didefenisikan sebagai selisih harga pembacaan gayaberat setiap stasiun pada waktu yang berbeda (Kadir,1999).
Apabila tidak ada perubahan keadaan lingkungan sekitarnya maka anomali gayaberat mikro 4D dipengaruhi oleh kemungkinan adanya perubahan elevasi dan perubahan massa bawah permukaan. Kadir (1999), mengungkapkan bahwa untuk benda 3 dimensi dengan distribusi rapat massa ρ = (α, β, γ), dengan efek gayaberat di titik P(x, y, z) pada permukaan pada selang waktu tertentu (∆t) diberikan oleh :
[
]
∫ ∫ ∫
∞ ∞ ∞ − ∞ ∞ − − + − + − − Δ Δ = Δ Δ 0 2 3 2 2 2 ( ) ( ) ) ( ) )( , , , ( ) , , , ( α β γ γ β α γ γ β α ρ d d d z y x z t G t z y x g...
(2.8)Jika perubahan gayaberat untuk geometri tertentu misalnya pada prisma tegak maka persamaan (2.8) di atas dapat ditulis ulang menjadi persamaan (2.9) sebagai berikut :
∆g(x, y, z, ∆t) = K. ∆ ρ(x, y, z, ∆t)
……….………
(2.9) dimana K adalah fungsi Green yang berhubungan dengan geometri dan volume benda anomali, sedangkan :∆g(x, y, z, ∆t) = g(x, y, z, t’)- g(x, y, z, t)
.……….………
(2.10) Anomali gayaberat ini berhubungan langsung dengan adanya perubahan rapat massa yang diakibatkan oleh perubahan material yang mengisi volume pori sumberanomali pada selang waktu tersebut. Rapat massa yang didefinisikan dengan ρ merupakan perbandingan massa terhadap volume suatu benda. Suatu batuan dengan pori–pori yang terisi oleh fluida (air, minyak dan atau gas) dapat diberikan sebagai rapat massa dengan n komponen. Fraksi dan rapat massa fraksi masing-masing Vi dan
i
ρ dapat dinyatakan dengan persamaan (Shcőn,1995):
∑
= = n i i i res V V 1 ρ ρ………
(2.11)Jika fraksi diasumsikan menjadi dua bagian yaitu fraksi matriks padat dengan porositas tertentu, fraksi fluida maka persamaan (2.11) menjadi :
f f m m res V V V V ρ ρ ρ = +
………...
(2.12) Jika saturasi fluida sama dengan rasio volume fluida (Vf) dengan volume pori)
(Vp dan porositas (φ sama dengan rasio volume pori ) (Vp) dan volume total (V),
maka diperoleh persamaan :
φ ρ ρ φ ρres =(1− ) m +Sf f
………...……...
(2.13) dimana : ρres = rapat massa reservoirm
ρ = rapat massa matrix
f
ρ = rapat massa fluida
f
S = saturasi fluida, merupakan perbandingan antara volume fluida Vf dengan volume pori Vp
φ = porositas .
Persamaan (2.13) menjelaskan perubahan rapat massa pada reservoir dipengaruhi oleh perubahan saturasi fluida atau perubahan massa komponen – komponennya, apabila rapat massa komponen (tidak ada perubahan temperatur atau tekanan) pembentuknya tetap dan porositas reservoar tidak berubah. Sehingga
perubahan rapat massa pada reservoar hanya dipengaruhi oleh pergantian fluida yang terjadi selama rentang waktu tertentu. Pergantian fluida yang dimaksudkan adalah adanya proses injeksi atau produksi yang dilakukan (ρ2) yang akan menyebabkan terjadinya pengurangan atau penambahan fluida dari kondisi awal (ρ1) sebelum adanya proses injeksi ataupun produksi.
Kontras densitas yang terjadi pada daerah penelitian selama rentang waktu tertentu, diberikan oleh persamaan berikut :
1 2 ρ ρ ρ = − Δ
...
(2.14) dimana :(
φ)
ρm φSoρo ρ1 = 1− +...
(2.15)(
φ)
ρm φ(
Soρo Swρw)
ρ2 = 1− + +………....………...
(2.16) sehingga w wS φρ ρ = Δ...
(2.17) ketterangan : Sw = saturasi airSo = saturasi minyak ρw = densitas air ρo = densitas minyak
2.5
Anomali Gayaberat Mikro Time-Lapse
Bumi memiliki dinamika perubahan massa bawah permukaan yang disebabkan oleh faktor alamiah maupun buatan manusia. Hal ini dapat dibuktikan dengan pengukuran gayaberat. Berikut ini beberapa contoh dinamika bawah permukaan yang berpengaruh pada nilai gayaberat :
1) Dinamika fluida bawah permukaan 2) Perbedaan musim
3) Amblesan tanah
4) Perubahan topografi dan bagunan disekitar titik amat
Dinamika bawah permukaan akan mempengaruhi distribusi dan posisi titik ukur, maka apabila terjadi perubahan distribusi massa ataupun penambahan serta pengurangan massa dan perubahan jarak akan mengakibatkan perubahan nilai gayaberat.
Anomali gayaberat mikro time-lapse didefinisikan sebagai selisih harga pembacaan gayaberat setiap stasiun pada waktu yang berbeda (Kadir, 1999). Pada pengukuran gayaberat mikro time-lapse, pengukuran gayaberat dilakukan pada titik-titik yang sama sehingga diasumsikan tidak terjadi perubahan topografi dan tidak terjadi pergeseran titik ukur. Pada penelitian ini pengukuran dilakukan pada musim yang sama, dilakukan pada daerah yang tidak padat penduduk dan tidak terjadi penambahan bangunan pada kurun waktu pengukuran (Bulan Mei – September 2003) sehingga aktivitas manusia tidak terlalu mempengaruhi perubahan gayaberat dalam kurun waktu pengukuran. Maka faktor yang mempengaruhi perubahan gayaberat hanya faktor dinamika fluida bawah permukaan, dalam hal ini dinamika fluida pada resrvoar.
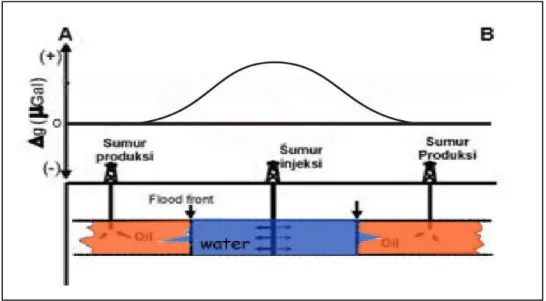
Gambar 2.2 mengilustrasikan pergantian ’fluida 1’ dengan kontras densitas ρ0
oleh ’fluida 2’ dengan kontras densitas ρ1, dan direpresentasikan oleh perubahan nilai
gayaberat (∆g) yang diukur di permukaaan pada selang waktu tertentu sebagai respons dari aktifitas injeksi fluida kedalam reservoir.Gambar 2.3 merupakan model penampang skematik yang mengilustrasikan respons anomali gayaberat akibat proses injeksi air ke dalam reservoir. Pada gambar tersebut dapat dilihat bahwa injeksi air akan memberikan nilai anomali gayaberat mikro 4D positif.
2.6
Pemisahan Anomali dan Noise
Anomali yang terukur dipermukaan merupakan anomali keseluruhan yaitu anomali yang disebabkan oleh injeksi air, proses produksi hidrokarbon, dan juga akibat perubahan muka air tanah. Target yang akan dicari dalam metoda gayaberat 4D adalah anomali akibat perubahan massa bawah permukaan terutama perubahan massa yang terjadi di reservoar, sedangkan perubahan muka air tanah dianggap sebagai noise. Oleh karena itu untuk menghilangkan efek perubahan muka air tanah maka dilakukan filtering terhadap anomali gayaberat. Apabila dilihat dari panjang
gelombang maka anomali target akan lebih besar dibandingkan dengan anomali noise.
Untuk menghilangkan efek perubahan muka air tanah maka dilakukan filtering. Salah satu metode yang digunakan adalah dengan metode moving average. Metode moving average ini dilakukan dengan cara merata-ratakan nilai anomalinya. Hasil dari perata-rataan anomali ini merupakan anomali target. Gambar 2.4 merupakan contoh aplikasi dari moving average pada peta dua dimensi dengan spasi grid 100 m dan lebar jendela 400×400 m2.
Nilai anomali target (g33) didapat dengan menjumlahkan semua nilai g dalam
persegi kemudian dibagi dengan banyaknya titik dalam persegi. Persamaannya dapat ditulis sebagai berikut:
33
[
(
11 12 13 ... 55)
]
25 1 g g g g g = + + + +………..…………..
(2.18)2.7
Pemodelan data gayaberat mikro time lapse
Dalam metode gayaberat mikro time lapse, interpretasi data dilakukan setelah dilakukan proses pemisahan anomali gayaberat dan noise.
g11 g12 g13 g14 g15
g21 g22 g23 g24 g25
g31 g32 g33 g34 g35
g41 g42 g43 g44 g45
g51 g52 g53 g54 g55
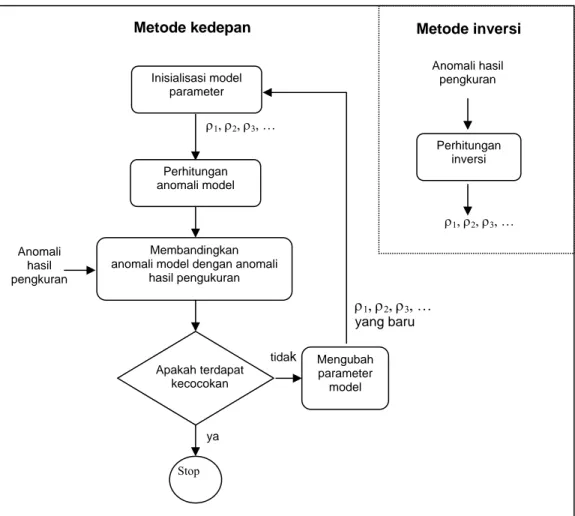
Pemodelan kedepan dan pemodelan kebelakang data gayaberat merupakan bagian dari teknik interpretasi yang dilakukan untuk merekonstruksi distribusi densitas bawah permukaan. Dalam pemodelan kedepan, model awal didasarkan pada intuisi geologi dan geofisika. Secara umum, proses yang dilakukan pada pemodelan kedepan ini adalah menghitung anomali model serta membandingkan anomali model tersebut dengan anomali hasil pengukuran, hingga diperoleh kecocokan antara anomali model dengan anomali hasil pengukuran. Sedangkan pada pemodelan inversi, parameter densitas dapat dihitung langsung dari anomali hasil pengukuran melalui metode numerik (Blakely, 1995).
Inisialisasi model parameter
Perhitungan anomali model
Membandingkan anomali model dengan anomali
hasil pengukuran Apakah terdapat kecocokan Stop ya tidak Mengubah parameter model ρ1, ρ2, ρ3, … Anomali hasil pengkuran Perhitungan inversi ρ1, ρ2, ρ3, … Anomali hasil pengkuran
Metode kedepan Metode inversi
ρ1, ρ2, ρ3, …
yang baru
Gambar 2.5 Diagram alir metode kedepan dan kebelakang data gayaberat (Modifikasi dari Blakely, 1995)
a. Forward Modeling
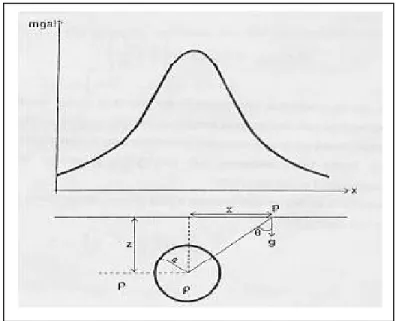
Pada forward modeling atau pemodelan kedepan, ada beberapa model benda sederhana yang dapat digunakan, seperti model bola berikut ini :
Efek gayaberat bola di titik P dengan sistem koordinat seperti Gambar 2.4 adalah : 2 3 2 2 3 ) ( 3 4 z x z a g + Δ = Δ π γ ρ
………..
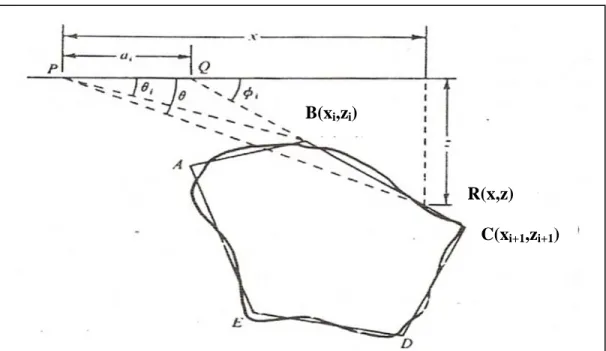
(2.19) ρΔ merupakan selisih antara ρ2 dan ρ1, sedangkan a merupakan jari-jari bola. Pada kenyataannya sangat sulit menemukan kondisi atau model bentuk sederhana ini. Oleh karena itu untuk hasil model yang lebih sesuai maka model dengan bentuk sembarang merupakan pendekatan yang lebih baik dengan pertimbangan informasi geologi pada daerah penelitian kita. Model benda sembarang 2D yang banyak digunakan adalah model dengan pendekatan bentuk poligon dengan menggunakan jumlah sisi poligon (n) tertentu untuk
memperkirakan garis besar dari bagian vertikal dari benda 2D, maka dapat dihitung efek gayaberatnya.
Untuk benda diatas, efek gayaberatnya adalah sama dengan integral garis disikitarnya yaitu :
∫
Δ =
Δg 2γ ρ zdθ
………..
(2.20)Dari geometri pada gambar diatas terdapat beberapa hubungan yaitu
(
)
(
φ θ)
φ θ φ θ tan tan tan tan tan ) ( tan − = − = = i i i i i a z a x x z...
(2.21)Integral garis untuk sisi BC adalah
Gambar 2.7 Pemodelan benda 2D dengan pendekatan bentuk poligon (Telford,1976) B(xi,zi)
C(xi+1,zi+1) R(x,z)
i C B i i i BC d Z a zd = − =
∫
∫
θ θ φ φ θ θ tan tan tan tan...
(2.22) Sehingga gayaberat komponen vertikal untuk seluruh benda adalah∑
= Δ = n i i Z V 1 2γ ρ...
(2.23) Jika masing-masing koordinat A, B,...dan R diketahui, misalnya :B=B(xi,zi); C=C(xi+1,yi+1);... dan.R=R(x,z)
Maka komponen gayaberat vertikalnya menjadi
⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ⎭ ⎬ ⎫ ⎩ ⎨ ⎧ − − + − = + + + ) tan (tan cos ) tan (tan cos log . tan ) ( cos sin 1 1 1 i i i i i i i i i i i i i a Z φ θ θ φ θ θ φ θ θ φ φ
....
(2.24) Dimana : ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ = − i i i x z 1 tan θ , ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − − = + + − i i i i i x x z z 1 1 1 tan φ , ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − − + = + + + + 1 1 1 1 i i i i i i i z z x x z x a...
(2.25)Pemodelan kedepan dalam anomali gaya berat mikro time-lapse adalah suatu proses untuk mendapatkan model bawah permukaan dari pengukuran anomali gaya berat 4D di permukaan. Model yang dihasilkan merupakan gambaran perubahan (pengurangan atau penambahan) massa di bawah permukaan dalam selang waktu tertentu.
b. Inverse Modeling 3-D
Inverse modeling merupakan metode interpretasi langsung dimana
parameter-parameter model diperoleh dari data anomali gayaberat pengamatan secara langsung dengan menggunakan sejumlah syarat batas berupa asumsi-asumsi model untuk mendapatkan solusi data gayaberat pengamatan.
Inversi gayaberat dilihat dari sudut pandang geofisika adalah problem penentuan distribusi densitas didalam bumi dari sejumlah data pengukuran gayaberat yang dilakukan di permukaan bumi. Pemodelan inversi pada penelitian ini menggunakan perangkat lunak Grav3D (dibuat oleh UBC Geophysical Inversion Facility, Department of Earth and Ocean Sciences, University of British Columbia).
Bumi dimodelkan dengan meng gunakan sejumlah sel rectangular dari densitas dan kemudian distribusi densitas akhir diperoleh dengan meminimalisir fungsi model objektif untuk menyesuaikan antara model dengan data lapangan.
Komponen vertikal dari medan gayaberat pada observasi ke-i dan lokasi ri
diberikan dengan persamaan berikut ini: 0 0 3 ( ) ( ) z V i z z F r r dv r r γ ρ − = −
∫
r r...
(2.26)dimana ߩሺ࢘ሬറሻadalah distribusi massa anomali, dan γ adalah konstanta gravitasi Newton. Tujuannya adalah menentukan densitas ρ secara langsung dari data gayaberat yang diberikan (Fz). Sementara itu error atau ketidak-sesuain antar data
diberikan oleh persamaan berikut ini: 2 ( obs d W d dd φ = −
...
(2.26) dimana dobs = ( 1,..., )T z zNF F adalah vektor data, d adalah data prediksi, Wd =
diagonal (1σ1,...,1σN ), danσiadalah standar deviasi datum ke-i. Model yang diterima adalah model yang menyebabkan φd yang cukup kecil.
Untuk memperoleh sebuah model yang teliti, didefinisikan fungsi obyektif densitas dan minimalkan jumlah target untuk kecocokkan data. Fungsi obyektif merupakan fungsi yang tidak dapat berdiri sendiri namun secara umum kita memerlukan model yang memiliki densitas referensi (ρ0). Fungsi obyektif adalah sebagai berikut
2 2 0 0 ( )( ( )( ) m s V s x V x w z w w z dv w dv x ρ ρ φ =α ρ ρ− +α ⎛⎜∂ − ⎞⎟ + ∂ ⎝ ⎠
∫
∫
( )(
0)
( )( 0) y V y z V z w z w z w dv w dv y z ρ ρ ρ ρ α ⎛⎜∂ − ⎞⎟ +α ⎛⎜∂ − ⎞⎟ ∂ ⎝ ∂ ⎠ ⎝ ⎠∫
∫
...
(2.27)dimana fungsi ws, wx, wy, dan wz adalah fungsi bobot spasial sedangkan
, , ,
x y z z
α α α α adalah koefisien yang mempengaruhi komponen relatif fungsi objektif yang berbeda. W(z) adalah fungsi bobot kedalaman.
Persamaan fungsi obyektif dapat digunakan untuk membangun banyak model yang berbeda. Model referensi ρ0 dapat berupa densitas yang diestimasi dari penyelidikan sebelumnya namun dapat pula berupa model nol. Fungsi ws
mengontrol model final terhadap model referensi. Namun fungsi ini dapat dihilangkan jika tidak diinginkan. Sementara fungsi wx, wy, wz dapat didesain
untuk meningkatkan struktur beberapa wilayah dalam domain model. Model referensi dan keempat fungsi bobot 3-D dapat ditambah dengan beberapa informasi lainnya seperti pengetahuan mengenai kontras densitas, data survey geofisika lainnya maupun dari pemahaman interpreter mengenai geologi dan hubungannya dengan densitas. Jika hal ini dilakukan, bukan saja model yang dihasilkan memiliki error yang kecil tetapi mewakili model bumi.
Untuk memperoleh solusi numerik ke dalam problem inversi, maka sangat penting sekali untuk mendiskrit masalah. Hal ini dilakukan dengan membagi wilayah sumber ke dalam beberapa sel dengan mesh 3-D dan mengasumsikan nilai densitas yang konstan dalam setiap sel.