TUGAS AKHIR – SM141501
PERBANDINGAN PENGENDALI T2FSMC DAN
PENGENDALI PID PADA PROTOTYPE PANEL SURYA MOCH. HAFIYYAN RIJAL
1211100051
Dosen Pembimbing :
1. Dr. Dra. Mardlijah, MT 2. Noorman Rinanto, ST., MT
JURUSAN MATEMATIKA
Fakultas Matematika dan Ilmu Pengetahuan Alam Institut Teknologi Sepuluh Nopember
ii
FINAL PROJECT– SM141501
COMPARISON T2FSMC CONTROLLER AND PID CONTROLLER IN SOLAR CELL PROTOTYPE
MOCH. HAFIYYAN RIJAL 1211100051
Supervisor :
1. Dr. Dra. Mardlijah, MT 2. Noorman Rinanto, ST., MT
Department of Mathematic
Faculty of Mathematics and Sciences Sepuluh Nopember Institute of Technology Surabaya 2017
iv
vi
PERBANDINGAN PENGENDALI T2FSMC DAN PENGENDALI PID PADA PROTOTYPE PANEL SURYA
Nama : Moch. Hafiyyan Rijal
NRP : 1211100051
Jurusan : Matematika FMIPA-ITS Pembimbing : 1. Dr. Dra. Mardlijah, MT
2. Noorman Rinanto, ST., MT Abstrak
Panel surya merupakan suatu alat pengkonversi dari cahaya matahari menjadi listrik. Pada panel surya terdapat suatu kolektor atau pengumpul cahaya dan akan maksimal jika kolektor tegak lurus dengan cahaya matahari. Sehingga dibutuhkan suatu pengendali untuk mengendalikan kolektor. Pada Tugas Akhir ini dirancang dua sistem pengendali yaitu T2FSMC dan PID untuk memaksimalkan gerakan kolektor. Penelitian dilakukan dengan membuat simulasi pada kedua pengendali menggunakan Simulink Matlab untuk membandingkan sifat dari kecepatan sudut. Sehingga didapatkan hasil bahwa pengendali T2FSMC mampu bekerja lebih baik terhadap sistem panel surya, karena didapatkan sifat dari pengendali T2FSMC tidak menghasilkan overshoot sedangkan pengendali PID menghasilkan overshoot. Hasil yang sudah disimulasikan dibandingkan dengan hasil eksperimen dan didapatkan bahwa pengendali T2FSMC mampu bekerja lebih baik juga dengan membandingkan kecepatan sudut, voltase, dan arus yang didapatkan. Akan tetapi pengendali T2FSMC dibutuhkan waktu yang lama untuk hasil running pada simulasi daripada pengendali PID.
Kata kunci: Panel Surya, Sistem Pengendali, Type 2 Fuzzy Sliding Mode Control (T2FSMC), Proportional Integral Derivative (PID)
viii .
COMPARISON T2FSMC CONTROLLER AND PID CONTROLLER IN SOLAR CELL PROTOTYPE Name : Moch. Hafiyyan Rijal
NRP : 1211100051
Department : Matematika FMIPA-ITS Supervisor : 1. Dr. Dra. Mardlijah, MT
2. Noorman Rinanto, ST., MT Abstract
Solar cell is solar thermal converter tool into electrical. In solar cell there is a collector that collect thermal and will work maximal wehen the position of collector is perpendicular with the sun. Then it needed a control system to control collector. In this final project designed two controllers, T2FSMC and PID controller to maximize collector’s drive system. Research will be done by making simulation on two controllers by using Matlab Simulink to comparison a velocity angular. So it was concluded that T2FSMC controller work better than PID controller in solar cell prototype, because the nature of the T2FSMC controller obtained produces no overshoot while the PID controller generates overshoot. Results that have been simulated and compared with experimental results obtained that the controller is able to work better T2FSMC also by comparing the velocity of angle, voltage and current are obtained. But T2FSMC controller takes a long time for the results of running the simulation rather than a PID controller.
Keywords: Solar Cell, Control System, Type 2 Fuzzy Sliding Mode Control (T2FSMC), Proportional Integral Derivative (PID)
x
KATA PENGANTAR
Alhamdulillahirobbil’aalamin, segala puji dan syukur penulis panjatkan kehadirat Allah SWT yang telah memberikan limpahan rahmat, taufik serta hidayah-Nya, sehingga penulis dapat menyelesaikan Tugas Akhir yang berjudul
“PERBANDINGAN PENGENDALI T2FSMC DAN PENGENDALI PID PADA PROTOTYPE PANEL SURYA ”
Sholawat serta salam semoga selalu tercurahkan kepada Nabi Muhammad shallallahu alaihi wasallam. Dengan rasa syukur akhirnya tugas Akhir ini dapat terselesaikan dengan baik berkat kerja sama, bantuan dan dukungan dari berbagai pihak. Sehubungan dengan hal itu, penulis ingin mengucapkan terima kasih dan penghargaan kepada:
1. Bapak Dr. Imam Mukhlash, S.Si, MT selaku Ketua Jurusan Matematika ITS.
2. Ibu Dr. Dra. Mardlijah, MT dan Bapak Noorman Rinanto, ST., MT selaku Dosen Pembimbing yang telah memberikan bimbingan kepada penulis dengan baik dan sabar. Terima kasih atas segala bimbingan dan motivasinya kepada penulis dalam mengerjakan Tugas Akhir ini sehingga dapat terselesaikan dengan baik.
3. Bapak Dr. Didik Khusnul Arif, M.Si dan Bapak Drs.Iis Herisman, M.Sc selaku Ketua Program Studi dan Sekretaris Kaprodi S1 Jurusan Matematika ITS.
4. Bapak Drs. Soetrisno, MI.Komp. selaku Dosen Wali yang memberikan arahan dan semangat selama penulis menempuh pendidikan di Jurusan Matematika ITS.
5. Bapak dan Ibu dosen serta seluruh staf Tata Usaha dan Laboratorium Jurusan Matematika ITS yang tidak dapat penulis sebutkan satu-persatu.
xii
6. Keluarga tercinta terutama Babah, Mama, Kakak dan adik yang senantiasa menyematkan doa untuk penulis, serta menjadi motivasi terbesar dalam menyelesaikan Tugas Akhir ini.
7. Keluarga saya Matematika ITS 2011 yang senantiasa memberikan semangat dan dukunganya untuk menyelesaikan Tugas Akhir.
8. Sahabat – sahabat saya yang selalu bersedia menjadi tempat berkeluh kesah dan selalu memberikan dorongan pada diri saya.
9. Semua pihak yang tak dapat penulis sebutkan satu-persatu, terima kasih telah membantu sampai terselesaikannya Tugas Akhir ini.
Penulis menyadari bahwa Tugas Akhir ini masih jauh dari kesempurnaan. Oleh karena itu, penulis mengharapkan saran dan kritik dari pembaca.Semoga Tugas Akhir ini bermanfaat.
Surabaya, 26 Desember 2016 Penulis
DAFTAR ISI
TUGAS AKHIR – SM141501 ... i
LEMBAR PENGESAHAN ... Error! Bookmark not defined. Abstrak ...vii
Abstract ... ix
KATA PENGANTAR ... xi
DAFTAR ISI ... xiii
DAFTAR GAMBAR... xv
DAFTAR TABEL ... xvi
DAFTAR SIMBOL ...xvii
1.1 Latar Belakang ... 1 1.2 Rumusan Masalah ... 3 1.3 Batasan Masalah ... 3 1.4 Tujuan ... 3 1.5 Manfaat ... 4 1.6 Sistematika Penulisan ... 4 2.1 Panel Surya ... 5 2.2 Model Motor DC ... 7
2.3 Type 2 Fuzzy Logic Control ... 8
2.3.1 Membership Function ... 8
2.3.2 Operasi Pada Membership Function Type 2 ... 9
2.3.3 Struktur Dasar Pengendali Type 2 Fuzzy ... 10
2.4 Pengendali T2FSMC ... 11
2.5 Pengendali PID ... 14
3.1 Studi Literatur ... 17
3.2 Desain Kendali T2FSMC dan PID ... 17
3.2.1 T2FSMC ... 17
xiv
3.3 Pengambilan Data ... 17
3.4 Simulasi ... 18
3.5 Analisis ... 18
3.6 Kesimpulan ... 18
4.1 Pemodelan Matematika Pada Panel Surya ... 19
4.2 Perancangan Pengendali T2FSMC ... 21
4.3 Perancangan Pengendali PID ... 25
4.5 Perbandingan Hasil Pengambilan Data Pada Panel Surya ... 29 ... 33 5.1 Kesimpulan ... 35 5.2 Saran ... 35 DAFTAR PUSTAKA ... 37 LAMPIRAN A ... 39 LAMPIRAN B ... 41 BIODATA PENULIS ... 45
DAFTAR GAMBAR
Gambar 2.1 Diagram sistematik panel surya ... 5
Gambar 2.2 Diagram blok masukan dan keluaran panel surya ... 6
Gambar 2.3 Prototype panel surya ... 6
Gambar 2. 4 Model motor DC ... 7
Gambar 2. 5 Membership function ... 9
Gambar 2. 6 Operasi pada membership function Type 2 ... 10
Gambar 2. 7 Struktur dasar pengandali Type 2 Fuzzy Logic ... 11
Gambar 2. 8 Skema dasar pengendali T2FSMC ... 12
Gambar 2. 9 Interpretasi grafis dan ... 13
Gambar 2. 10 Blok diagram PID ... 14
Gambar 4. 1 Plant sistem panel surya ... 21
Gambar 4. 2 Fungsi keanggotaan ... 23
Gambar 4. 3 Fungsi keanggotaan ... 23
Gambar 4. 4 Fungsi keanggotaan ... 24
Gambar 4. 5 Diagram blok T2FSMC ... 24
Gambar 4. 6 Diagram blok PID ... 26
Gambar 4. 7 Desain kendali PID ... 26
Gambar 4. 8 Simulasi T2FSMC ... 27
Gambar 4. 9 Hasil simulasi PID pertama ... 28
Gambar 4. 10 Hasil simulasi PID kedua... 28
Gambar 4. 11 Perbandingan T2FSMC dan PID ... 29
Gambar 4. 12 Perbandingan kecepatan sudut panel surya ... 30
Gambar 4. 13 Perbandingan voltase pada panel surya ... 32
Gambar 4. 14 Perbandingan voltase pada baterai ... 32
Gambar 4. 15 Perbandingan voltase pada beban ... 33
Gambar 4. 16 Perbandingan arus pada panel surya ... 33
Gambar 4. 17 Perbandingan arus pada baterai ... 34
xvi
DAFTAR TABEL
Tabel 2. 1 Aturan umum fuzzy untuk pengendali FSMC ... 13
Tabel 4. 1 Parameter dari panel surya ... 20
Tabel 4. 2 Nilai parameter PID pertama... 27
DAFTAR SIMBOL
( ) Besarnya tegangan yang diberikan pada motor (volt) ( ) Emf balik (volt)
( ) Arus jangkar (Ampere)
( ) Tahanan kumparan jangkar (Ohm) ( ) Induktansi kumparan jangkar (Henry)
Konstanta emf balik (Volt-sec/rad) Konstanta Torsi (N-m/Ampere) Momen Inersia rotor (Kg – m2)
Koefisien gesekan viskos (N-m/rad/sec) ( ) Torsi Motor (N-m)
( ) Kecepatan sudut motor (rad/sec)
( ) Kecepatan sudut motor yang diinginkan (rad/sec) Control input
Vektor keadaan
Vektor keadaan yang diinginkan Vektor yang memuat sinyal error Fungsi switching
Lebar boundary layer Konstanta positif Konstanta positif ̃ Himpunan type 2 fuzzy
Fungsi keanggotaan utama (primary membership) ̃( ) Fungsi keanggotaan sekunder (secondary membership)
Jarak antara titik keadaan dengan permukaan sliding Jarak antara titik keadaan dengan garis normal dari
xviii
BAB I PENDAHULUAN
Pada bab ini dijelaskan berbagai hal yang menjadi latar belakang munculnya permasalahan yang dibahas dalam Tugas Akhir ini. Kemudian permasalahan tersebut disusun kedalam suatu rumusan masalah. Selanjutnya dijabarkan juga batasan masalah untuk mendapatkan tujuan yang diinginkan serta manfaat yang dapat diperoleh. Adapun sistematika penulisan diuraikan pada bagian akhir bab ini
1.1 Latar Belakang
Indonesia merupakan negara kepulauan yang terdiri kurang lebih dari 17.508 pulau besar dan kecil. Terdiri dari ribuan pulau menjadikan Indonesia sebagai negara agraris, sehingga memiliki banyak sumber terbarukan seperti air dan angin. Didukung letak geografisnya yang beriklim tropis, menjadikan Indonesia sebagai negara yang mendapatkan banyak sinar matahari yang merupakan sumber daya terbarukan juga. Tenaga air, angin, dan surya dari matahari mudah didapatkan di Indonesia akan tetapi belum dapat dioptimalkan. Hal tersebut dikarenakan biaya untuk membuat pembangkit listrik dengan energi terbarukan jauh lebih mahal daripada pembangkit listrik dengan energi fosil (bahan bakar minyak, gas bumi, batubara, dan lain-lain). Untuk mengatasi punahnya energi fosil, bangsa Indonesia seharusnya bisa mengembangkan energi terbarukan. Penduduk Indonesia semakin meningkat tiap tahunnya dan hingga saat ini penduduk Indonesia banyak yang bergantung pada alat yang menggunakan listrik. Panel surya sangat cocok digunakan di Indonesia, terlebih bagi penduduk pedalaman yang kurang mendapatkan listrik.
Panel surya merupakan salah satu solusi untuk mengatasi kepunahan energi fosil. Panel surya merupakan suatu alat untuk mengumpulkan cahaya matahari dan dikonversikan menjadi energi listrik. Panel surya terdiri dari sel surya, aki dan batrei. Ditambah lagi dengan suatu kolektor atau pengumpul dan harus selalu memiliki posisi yang tegak lurus dengan matahari. Hal ini
2
adalah sebuah upaya untuk meningkatkan efisiensi dari panel surya [1]. Penelitian tentang panel surya tracker yang dilakukan oleh Imam Abadi [8] menunjukkan peningkatan efisiensi. Agar dapat memiliki posisi yang selalu tegak lurus dengan matahari maka, diperlukan suatu pengendali sehingga dapat menyerap sel surya secara maksimal. Panel surya merupakan alat yang menghasilkan arus searah atau DC, maka harus digunakan converter yaitu pengubah arus DC ke AC (arus bolak balik) dan sebaliknya. Karena beberapa alat rumah tangga menggunakan arus AC seperti setrika, kulkas, televisi, dsb.
Sudah banyak pengembangan yang dilakukan tentang pengendali pada panel surya, salah satunya kini telah berkembang suatu prototype panel surya yang menggunakan dua pengendali atau pengendali yaitu Type 2 Fuzzy Sliding Mode Control (T2FSMC) dan Proportional Integral Derivative (PID). T2FSMC merupakan pengembangan dari sebuah pengendali Fuzzy Sliding Mode Control (FSMC) yaitu kombinasi antara Sliding Mode Kontrol (SMC) dan Fuzzy Logic Control (FLC). SMC merupakan salah satu dari pengendalian robust yaitu pengendalian yang mampu bekerja dengan baik pada sistem linier ataupun nonlinier yang memiliki ketidakpastian model dan parameter [2]. Kemudian FLC berbeda dengan SMC karena FLC terbukti lebih efektif menghadapi sistem nonlinier yang kompleks dengan ketidakpastian yang sulit dimodelkan [3]. Kelemahan dari SMC adalah sedikit rumit pada perancangannya dan masih adanya error meskipun terhitung kecil saat terjadi perubahan parameter berupa penurunan nilai parameter. Kemudian kelemahan dari FLC yaitu keterbatasan analisis maupun sintesis terhadap metode ini. Maka dimodifikasi antara SMC dan FLC menjadi FSMC dan kemudian dikembangkan lagi menjadi T2FSMC. Sedangkan Proportional Integral Derivative (PID) banyak digunakan karena keberhasilan pengendali ini bergantung pada ketepatan dalam menentukan konstanta. Sedangkan kelemahan dari PID pengendali sendiri adalah konstantanya selalu sama untuk setiap nilai error yang terjadi dan perlu penalaan ulang jika terjadi perubahaan parameter plant pada konstanta PID.
3 Dengan berkembangnya prototype diatas, maka pada tugas akhir ini dibahas perbandingan antara dua metode kontrol yaitu T2FSMC dan PID. Sehingga diharapkan dengan penelitian ini akan didapatkan metode yang lebih baik untuk mengoptimalkan panel surya.
.
1.2 Rumusan Masalah
Berdasarkan latar belakang maka permasalahan yang akan dibahas dapat dirumuskan sebagai berikut:
1. Bagaimana kinerja pengendali T2FSMC dengan simulasi dan eksperimen terhadap prototype panel surya?
2. Bagaimana kinerja pengendali PID dengan simulasi dan eksperimen terhadap prototype panel surya?
3. Bagaimana perbandingan kinerja pengendali T2FSMC dan PID dengan simulasi dan eksperimen pada prototype?
1.3 Batasan Masalah
Batasan dari permasalahan yang akan dibahas pada Tugas Akhir ini adalah :
1. Prototype yang digunakan adalah hasil penelitian dosen. 2. Pengendali T2FSMC merujuk dari tugas akhir Yahya
Efprianto.
3. Parameter dari motor DC dirujuk dari tugas akhir Sega Bagus Prandita.
4. Data yang diambil merupakan data dari prototype panel surya. 1.4 Tujuan
Berdasarkan rumusan permasalahan, maka tugas akhir ini diharapkan dapat memberikan solusi dari permasalahan yang ada. Oleh karena itu, tujuan yang ingin dicapai dalam tugas akhir ini adalah sebagai berikut:
1. Menganalisa performansi sistem kontrol posisi panel surya yang dikendalikan dengan pengendali T2FSMC dan pengendali PID.
2. Menentukan metode pengendali T2FSMC atau PID yang lebih baik pada panel surya.
4
1.5 Manfaat
Manfaat dari penulisan tugas akhir ini adalah didapatkan pengendali yang lebih baik antara pengendali T2FSMC dan pengendali PID pada prototype panel surya. Sehingga kedepannya dapat dikembangkan sebuah panel surya dengan performansi yang lebih baik.
1.6 Sistematika Penulisan
Sistimatika penulisan dalam laporan Tugas Akhir ini adalah sebagai berikut :
1. BAB I PENDAHULUAN
Bab ini menjelaskan mengenai latar belakang, rumusan masalah, tujuan, manfaat penelitian, dan sistematika penulisan Tugas Akhir..
2. BAB II TINJAUAN PUSTAKA
Bab ini menjelaskan mengenai penelitian terdahulu, pengertian sistem, sistem panel surya, pemodelan matematika motor DC, Pengendali T2FSMC, dan Pengendali PID.
3. BAB III METODOLOGI PENELITIAN
Bab ini membahas tentang tahapan – tahapan yang digunakan dalam penyelesaian dari Tugas Akhir.
4. BAB IV ANALISIS DAN PEMBAHASAN
Bab ini menjelaskan mengenai penentuan langkah langkah untuk mendesain pengendali T2FSMC dan PID , dalam bab ini dijelaskan hasil pengambilan data langsung pada prototype panel surya.
5. BAB V KESIMPULAN DAN SARAN
Bab ini menjelaskan tentang penarikan kesimpulan yang diperoleh dari pembahasan masalah pada bab sebelumnya serta saran yang diberikan untuk pengembangan penelitian selanjutnya.
BAB II
TINJAUAN PUSTAKA
Pada bab ini akan dijelaskan mengenai beberapa penelitian terdahulu, pengertian sistem, sistem panel surya, pemodelan matematika yang terdiri dari Panel surya, Model motor DC, Pengendali T2FSMC, dan Pengendali PID.
2.1 Panel Surya
Panel surya adalah alat yang mampu mengkonversikan langsung cahaya matahari menjadi suatu energi listrik atau biasa disebut fotovoltaik. Panel surya bisa dianalogikan sebagai alat dengan dua terminal, dimana saat kondisi gelap atau tidak cukup cahaya berfungsi sebagai dioda dan saat disinari dengan cahaya matahari dapat menghasilkan tegangan.
Berikut merupakan model sederhana dari sebuah panel surya yang telah dimodelkan oleh Benjamin S Kuo. [4].
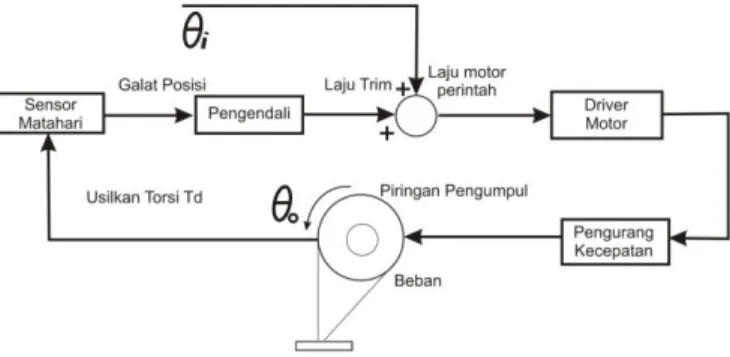
Gambar 2.1 Diagram sistematik panel surya
Prinsip kerja pada gambar diatas adalah bagaimana mengatur posisi kolektor atau piringan pengumpul agar selalu tegak lurus dengan matahari. Dan apabila matahari jatuh ke permukaan panel secara tegak lurus, maka akan didapatkan energi maksimum kurang lebih 1000W/m2 atau 1kW/m2 [4].
6
Gambar 2.2 Diagram blok masukan dan keluaran panel surya adalah masukan dari sistem berupa sudut sinar matahari dan diterima oleh dua sensor sistem panel surya. Dan pada saat sensor diarahkan ke sinar matahari, sinar cahaya dari celah akan melingkari kedua sel tersebut. Dan 0 adalah keluaran dari sistem
berupa posisi sudut dari motor yang mana nantinya akan digunakan untuk menggerakkan kolektor atau pengumpul supaya dapat berputar mengikuti arah posisi matahari.
Pemodelan dari sistem panel surya yaitu dengan cara menurunkan persamaan matematis dari bagian komponen utama seperti motor DC yang merupakan penggerak dari panel surya.
Berikut merupakan gambar dari sebuah prototype panel surya yang memiliki dua pengendali yaitu T2FSMC dan PID [14]:
7 2.2 Model Motor DC
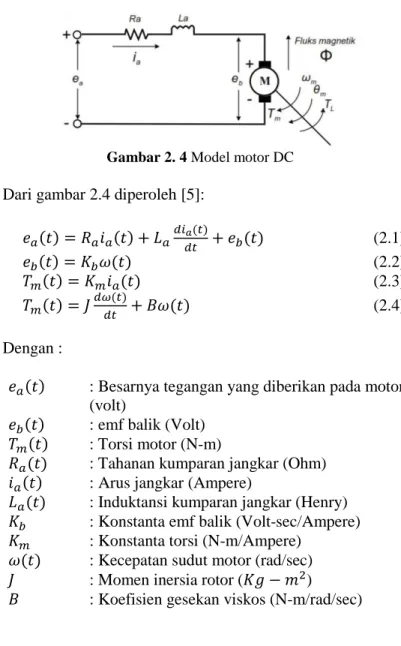
Motor DC merupakan alat penggerak panel surya. Input dari motor DC berupa listrik dan outputnya berupa mekanik. Berikut merupakan gambar sederhana dari motor DC [5]:
Gambar 2. 4 Model motor DC Dari gambar 2.4 diperoleh [5]:
( ) ( ) ( ) ( ) (2.1)
( ) ( ) (2.2)
( ) ( ) (2.3)
( ) ( ) ( ) (2.4)
Dengan :
( ) : Besarnya tegangan yang diberikan pada motor (volt)
( ) : emf balik (Volt) ( ) : Torsi motor (N-m)
( ) : Tahanan kumparan jangkar (Ohm) ( ) : Arus jangkar (Ampere)
( ) : Induktansi kumparan jangkar (Henry) : Konstanta emf balik (Volt-sec/Ampere)
: Konstanta torsi (N-m/Ampere) ( ) : Kecepatan sudut motor (rad/sec) : Momen inersia rotor ( ) : Koefisien gesekan viskos (N-m/rad/sec)
8
2.3 Type 2 Fuzzy Logic Control
Prinsip Type-2 Fuzzy Logic merupakan penerapan teori himpunan fuzzy pada bidang pngendalian sistem. Type-2 Fuzzy merupakan pengembangan dari Type-1 Fuzzy. Type-1 Fuzzy Logic seringkali basis pengetahuan yang digunakan untuk membangun rules tidak menentu [11]. Adapun mengapa ketidakpastian rules dapat terjadi, yaitu :
a. Perbedaan dalam menentukan himpunan consequence setiap kaidah
b. Perbedaan kata-kata antecedent dan consequent dari rules bisa mempunyai kaidah yang berbeda pada orang yang berbeda
c. Adanya ganggun (noise) yang menyisipi data
Sistem logika Type 1 fuzzy yang memiliki fungsi keanggotaan yang tegas, tidak mampu untuk mengatasi ketidakpastian ini. Sedangkan sistem logika fuzzy bertipe 2 interval yang memiliki fungsi keanggotaan interval, memiliki kemampuan untuk mengatasi ketidakpastian ini [11]. Pengertian dari interval Type 2 fuzzy logic sistem dikenalkan oleh Zadeh pada tahun 1970an sebagai perluasan dari konsep himpunan fuzzy biasa atau dapat disebut himpunan Type 1 fuzzy. Konsep utama fuzzy bertipe 2 adalah kata dapat diartikan berbeda oleh orang yang berbeda. Type 2 fuzzy logic meliputi membership function, fuzzy inference system, dan defuzzifikasi.
2.3.1 Membership Function
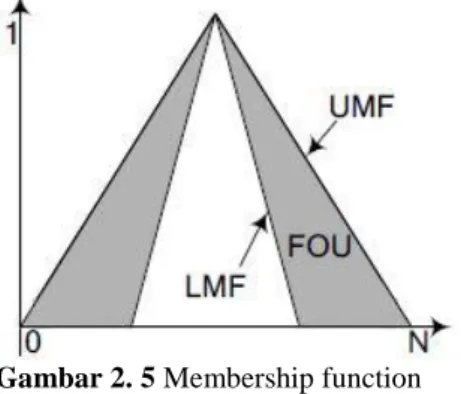
Fungsi keanggotaan Type 2 Fuzzy Logic meliputi The footprint of uncertainty (FOU), upper membership function (UMF) dan lower membership function (LMF). The footprint of uncertainty (FOU) memberikan derajat kebebasan tambahan yang memungkinkan untuk secara langsung memodelkan dan menangani ketidakpastian [9]. Type 2 fuzzy dapat juga mengurangi jumlah rules fuzzy jika dibandingkan dengan type 1
9 fuzzy [10]. Secara umum himpunan type 2 fuzzy dapat didefinikan sebagai berikut [9] :
̃ *( ) ̃( )) , -+ (2.13) Dengan , - representasi dari fungsi keanggotaan utama (primary membership) dari dan ̃( )) merupakan Type 1 Fuzzy yang dikenal dengan fungsi keanggotaan sekunder (secondary membership).
Footprint of uncertainty (FOU) adalah daerah terbatas yang memuat derajat ketidakpastian keanggotaan utama atau yang disebut fungsi keanggotaan utama (primary membership), dimana FOU gabungan dari semua fungsi keanggotaan utama [10]. FOU dibatasi oleh fungsi keanggotaan sekunder (secondary membership) yang terdiri dari upper membership function (UMF) dan lower membership function (LMF) yang merupakan fungsi keanggotaan dari Type 1 Fuzzy [9]. Membership function type 2 fuzzy logic dapat dilihat pada Gambar 2.5 :
Gambar 2. 5 Membership function 2.3.2 Operasi Pada Membership Function Type 2
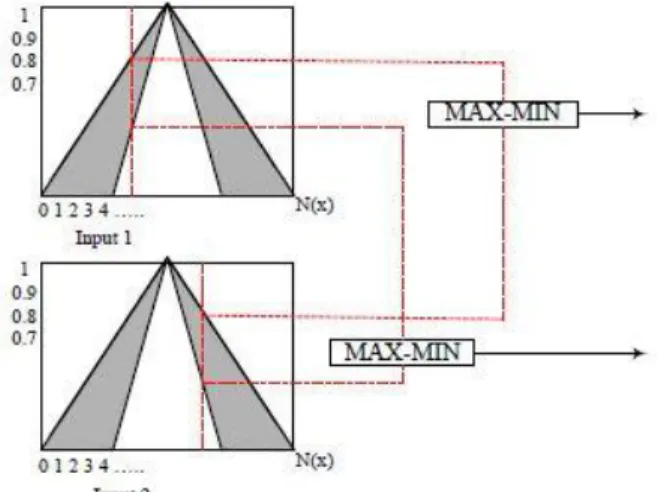
Operasi Type 2 Fuzzy Logic (T2FL) hampir sama dengan Type 1 Fuzzy set. Pada operasi Type 2 Fuzzy Logic dilakukan oleh dua Type 1 Fuzzy Logic sebagai batas dari fungsi keanggotaan FUO yaitu UMF dan LMF [10]. Operasi Type 2 Fuzzy secara umum terdiri gabungan (union), irisan (intersection), dan complement.
10
Operasi gabungan (union) dan irisan (intersection) Type 2 Fuzzy dilakukan dengan operator biner minimum (min) dan maksimum (max) [9]. Operasi pada Membership function type-2 dapat dilihat pada Gambar 2.6 :
Gambar 2. 6Operasi pada membership function Type 2
2.3.3 Struktur Dasar Pengendali Type 2 Fuzzy
Struktur dasar pengendali Type 2 Fuzzy hampir sama dengan struktur dasar Type 1 Fuzzy. Perberdaan struktur terletak pada proses defuzzifier. Struktur utama dari Type 2 Fuzzy Logic Controller (T2FLC) mempunyai kesamaan dengan Type 1 FLC. Fuzzifier, rule-base, inference dan proses output adalah struktur utama dari (IT2FLC). Perbedaan tipe 1 dan tipe 2 FLC hanya terletak pada proses output. Defuzzifier dan type reducer di IT2FLC merupakan bagian utama dari proses output. Type reducer dan defuzzifier di T2FLC menghasilkan himpunan output fuzzy tipe 1 atau sebuah bilangan crisp dari defuzzifier [11]. Struktur Type 2 Fuzzy dapat dilihat pada Gambar 2.7 :
11
Gambar 2. 7Struktur dasar pengandali Type 2 Fuzzy Logic Komponen utama dapat diuraikan sebagai berikut [11] : 1. Fuzzifier: proses dimana mengubah masukan (nilai real)
sehingga dapat digunakan pada aturan di rulebase dari nilai crisp menjadi nilai fuzzy.
2. Rule-base atau Kaidah: berisi kumpulan aturan fuzzy dalam mengendalikan sistem.
3. Inference: mengevaluasi aturan control yang relevan dan mengambil keputusan masukan yang akan digunakan untuk plant.
4. Defuzzifier/type reducer: fungsi dari defuzzifier mengubah keluaran fuzzy ke nilai crisp/nilai sebenarnya, dimana fungsi dari tipe reduksi mentranformasi type 2 fuzzy ke type 1 fuzzy.
2.4 Pengendali T2FSMC
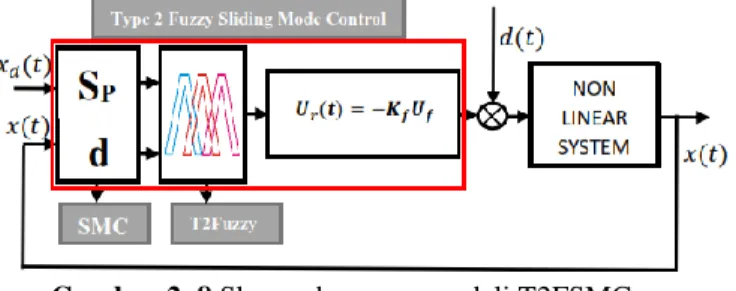
Seperti yang sudah dibahas sebelumnya, pengendali T2FSMC merupakan pengembangan dari pengendali FSMC. Yang mana FSMC adalah gabungan dari SMC dan FLC. Skema pengendalian T2FSMC hampir sama dengan skema pengendalian T1FSMC dimana masukan di IT2FLC adalah dua variabel yang ditentukan sebelumnya melalui pengendali SMC. Berikut merupakan skema dasar pengendali T2FSMC [5] :
12
Gambar 2. 8 Skema dasar pengendali T2FSMC
Cara kerja dari T2FSMC yaitu dengan menginputkan vektor keadaan ( ( ))dan vektor keadaan yang diinginkan ( ( )) ke pengendali SMC. Kemudian hasil tersebut dimasukkan kedalam aturan Type 2 Fuzzy sehingga didapatkan sebuah kontrol ( ( )). Kontrol yang dihasilkan akan digunakan pada prototype dan akan menghasilkan error setelah diberi gangguan ( ). Error akan diolah kembali pada T2FSMC dan berulang terus hingga mendapatkan hasil yang optimal atau error mengecil.
Pengendali T2FSMC bertujuan memperbaiki performansi dari sistem SMC. T2FSMC memiliki keuntungan yaitu mengurangi jumlah rules secara dramatis dikarenakan T2FSMC memendapatkan warisan sifat dari SMC dan FLC. Pengendali tersebut juga mewarisi sifat dari FLC untuk menangani ketidakpastian dan gangguan.
Skema pengendali T2FSMC dan skema pengendali FFSMC berbeda pada fuzzy yang digunakan. T2FSMC menggunakan type 2 fuzzy logic sehingga fungsi keanggotaan menggunakan type 2 fuzzy. Perancangan T2FSMC menggunakan permukaan sliding sama seperti SMC. Untuk menentukan nilai u yang akan diinputkan pada plant maka diperlukan fungsi switching. Nilai input u didapatkan dari aturan fuzzy seperti berikut.
̃ ̃ ̃ adalah ruang dari rules fuzzy ke i, ̃ dan ̃ merupakan nilai fuzzy dari keanggotaan fuzzy s dan d pada daerah fuzzy ke-i pada ruang keadaan fuzzy. ̃ merupakan hasil masukan yang berkorespondensi pada daerah fuzzy ke-i pada
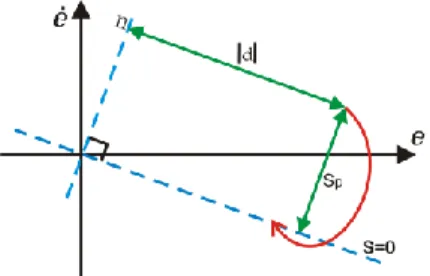
13 ruang fuzzy. untuk dan dapat dilihat pada gambar dibawah [1] :
Gambar 2. 9 Interpretasi grafis dan
merupakan jarak antara permkaan sliding dengan vektor keadaan. merupakan jarak antara vektor keadaan dan vektor normal terhadap permukaan sliding. Sehingga didapat sebuah persamaan [1] :
̇
√ (2.14)
√ (2.15)
Pada T2FSMC pengendali diperlukan aturan fuzzy yaitu akan menggunakan aturan fuzzy FSMC. Dapat dilihat aturan fuzzy pada pengendali FMSC sebagai berikut [1] :
Tabel 2. 1 Aturan umum fuzzy untuk pengendali FSMC
NB NM NS NZ PZ PS PM NB
M B PB PB PB PB PB PB PM PB NM NB NB NB NB NB NB NB
S PB PB PM PS NS NM NB NB
14
Dimana NB = negative big, NM = negative medium, NS = negative small, NZ = negative zero, PB = positive big, PM = positive medium, PS = positive small, PZ = positive zero.
Aturan tersebut digunakan untuk menentukan range membership function dan .
2.5 Pengendali PID
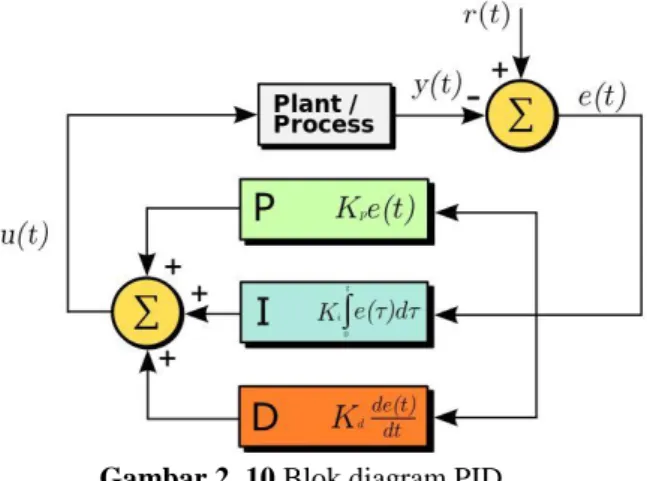
PID atau Porportional Integral Derivative merupakan pengendali untuk menentukan presisi suatu sistem instrumentasi dengan karakteristik adanya umpan balik pada sistem tersebut [13]. Pengontrol PID adalah pengontrol konvensional yang banyak dipakai dalam dunia industri. Pengontrol PID akan memberikan aksi kepada kontrol valve berdasarkan error yang diperoleh. Kontrol valve akan menjadi aktuator yang mengatur aliran fluida dalam proses industri yang terjadi level sudut matahari yang diinginkan disebut dengan set point. Error adalah perbedaan antara set point dengan level sudut matahari. Berikut merupakan blok diagram PID :
Gambar 2. 10 Blok diagram PID
Persamaan pengontrol PID : ( ) ( ) ∫ ( ) ( )
15 koefisien untuk term proportional, integral, derivative secara berurutan (atau P,I, dan D).
Pengendali P : bertanggung jawab untuk nilai kesalahan saat ini. Pengaruh pengendali proportional (P) pada sistem adalah :
1. Menambah atau mengurangi kestabilan.
2. Dapat memperbaiki respon transien khususnya : rise time, settling time.
3. Mengurangi (bukan menghilangkan) error steady state. Pengendali proportional memberikan pengaruh langsung pada error . Semakin besar error, semakin besar sinyal kendali yang dihasilkan pengendali.
Pengendali I : bertanggung jawab untuk nilai kesalahan sebelumnya. Pengaruh pengendali integral (I) pada sistem adalah :
1. Menghilangkan error steady state.
2. Respon lebih lambat (dibandingkan dengan P)
3. Dapat menambah ketidakstabilan (karena menambah orde pada sistem
Perubahan sinyal kontrol sebanding dengan perubahan error. Semakin besar error, semakin cepat sinyal kontrol bertambah/berubah.
Pengendali D : bertanggung jawab untuk kemungkinan nilai kesalahan mendatang. Pengaruh pengendali derivative (D) pada sistem adalah :
1. Memberikan efek redaman pada sistem yang berosilasi sehingga bisa memperbesar pemberian nilai Kp.
2. Memperbaiki respon transien, karena memeberikan aksi saat ada perubahan error.
16
3. D hanya berubah saat ada perubahan error, sehingga saat ada error statis D tidak beraksi. Sehingga D tidak boleh digunakan sendiri.
Besarnya sinyal kontrol sebanding dengan perubahan error (e). semakin cepat error berubah, semakin besar aksi kontrol ditimbulkan.
BAB III
METODOLOGI PENELITIAN
Bab ini menjelaskan langkah-langkah sistematis yang digunakan dalam penyelesaian masalah pada Tugas Akhir. Metode penelitian dalam tugas akhir ini terdiri dari enam tahap yaitu studi literatur, desain kendali T2FSMC dan PID, pengambilan data, simulasi, analisis, dan kesimpulan.
3.1 Studi Literatur
Pada tahap ini penulis akan melakukan studi literatur pada bidang yang berkaitan dengan penelitian demi terselesaikannya penelitian. Beberapa ilmu yang terkait dengan penelitian ini adalah pengendalian T2FSMC dan PID.
3.2 Desain Kendali T2FSMC dan PID
Pada tahap ini penulis mendesain sebuah pengendali T2FSMC untuk mengoptimalkan performansi panel surya. Begitu juga dengan pengendali PID didesain untuk mengoptimalkan performansi panel surya. Berikut merupakan diagram alur dari perancangan masing-masing pengendali
3.2.1 T2FSMC
Tahap perancangan pengendali panel surya ini akan dirancang sistem pengendali dengan metode SMC dan menentukan fungsi keanggotaan himpunan fuzzy dari SMC, membuat aturan fuzzy untuk menentukan control input dari rancangan SMC sebelumnya [5]. Plant yang digunakan adalah kecepatan sudut pada prototype panel surya.
3.2.2 PID
Tahap perancangan pengendali PID dengan menentukan parameter dengan trial error sampai menemukan hasil kendali yang terbaik. Plant yang digunakan adalah kecepatan sudut pada prototype panel surya.
3.3 Pengambilan Data
Pada tahap ini akan dilakukan pengambilan data langsung dari prototype panel surya. Hal ini dilakukan untuk acuan perbandingan hasil simulasi dengan menggunakan Simulink
18
Matlab dan hasil eksperimen yaitu pengambilan data pada prototype.
3.4 Simulasi
Pada tahap ini akan dibandingkan antara pengendali T2FSMC dan pengendali PID dengan menggunakan Simulink Matlab yang nantinya digunakan sebagai acuan pada anailisis performansi panel surya.
3.5 Analisis
Pada tahap ini dilakukan suatu analisa yaitu membandingkan hasil simulasi yang diuji dengan Simulink Matlab dan hasil eksperimen yg dilakukan dengan mengambil data pada prototype panel surya.
3.6 Kesimpulan
Tahap ini merupakan tahap terakhir, yaitu penarikan kesimpulan terhadap analisis perbandingan dua pengendali yaitu T2FSMC dan PID, dimana dalam tahap ini diharapkan kita memperoleh sebuah metode kontrol yang lebih baik untuk performansi panel surya
BAB IV
ANALISIS DAN PEMBAHASAN
Pada bab ini dijelaskan tentang sistem pengendalian pada panel surya, dimana pada bab sebelumnya telah dijelaskan cara merancang sistem pengendali posisi panel surya. Dimulai dengan pemodelan pada panel surya hingga perancangan sistem pengendali T2FSMC dan pengendali PID pada panel surya. Rancangan tersebut akan diimplementasikan pada Simulink Matlab dengan masing-masing pengendali. Kemudian akan dibandingkan hasil kedua sistem pengendali pada simulasi dengan hasil eksperimen yang sudah didapat pada prototype panel surya. 4.1 Pemodelan Matematika Pada Panel Surya
Pemodelan pada panel surya dilakukan dengan cara mensubstitusi dari persamaan-persamaan yang sudah dijelaskan pada pembahasan sebelumnya. Pertama mensubstitusi motor DC dengan persamaan 2.3 ke persamaan 2.4, sehingga didapat :
( ) ( ) ( ) ( )
( )
(4.1)
Kemudian mensubstitusi persamaan 2.2 dan 4.1 ke persamaan 2.1, sehingga didapat : ( ) . ( ) ( )/ ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) . / ( ) . / ( ) (4.2)
20 ̈ ( ) . / . / ̇ ̈ ( ) . / . / ̇ ̈ ( ) . / . / ̇ ̈ ( ) . / . / ̇ (4.3)
Kemudian dibuat permisalan seperti berikut : ( )
Kemudian ditambahkan dengan gangguan (d) maka persamaan 4.3 menjadi :
̈ ̇ (4.4)
Untuk mendapatkan nilai dari konstanta maupun parameter-parameter didapatkan dengan mengambil data langsung dari sebuah prototype panel surya yang diuji oleh saudara Sega Bagus Prandita[12]. Berikut merupakan tabel yang berisi parameter-parameter dari panel surya :
Tabel 4. 1 Parameter dari panel surya
Komponen Konstanta Satuan
0.00009 k.g.m2 0.000025 N.m.s Motor 0.030941093 N.m/Ampere 0.030941093 V/(rad/s) 18.2214 Ohm 0.000866 Henry
21 Kemudian digunakan model matematika pada persamaan 4.4 untuk diimplementasikan dalam bentuk diagram blok menggunakan Simulink Matlab.
Gambar 4. 1 Plant sistem panel surya 4.2 Perancangan Pengendali T2FSMC
Pengendali T2FSMC dirancang dengan menggunakan Type 2 Fuzzy Logic Control. Perancangan T2FSMC membutuhkan masukan berupa control input dari SMC. Sehingga diperlukan fungsi switching yang sama dengan pengendali SMC dengan menggunakan persamaan dengan dan ̇ ̇ ̇ .
Kontrol input u pada T2FSMC diperoleh dari varibel SMC yaitu dan . Variabel dan nantinya merupakan input dalam fuzzy tipe 2 pada perancangan kendali T2FSMC. Sehingga diperlukannya perancangan sebuah fungsi keanggotaan fuzzy tipe 2 dari dan . Perancangan fungsi keanggotaan dan T2FSMC diperoleh dengan menentukan interval keanggotaan dan ̇ yang di representasikan oleh dan ̇ ̇ ̇ dimana diperoleh dengan mengamati loop terbuka panel surya, maka didapatkan interval dan ̇ sebagai berikut:
, - ̇ , -
22
merupakan kecepatan sudut yang diinginkan atau disebut setpoint. Dengan didapatkan dari hasil pembagian jarak yang ditempuh oleh panel dengan waktu tempuhnya. Dengan asumsi bahwa panel mampu bergerak sebesar 1800 dengan waktu tempuh 12 jam. Namun untuk memperoleh nilai dari setpoint maka jarak tempuh harus dikonversikan pada satuan radian dan waktu dikonversikan pada satuan detik. Maka 1800 adalah atau 3,14 dibagi dengan 43.200 detik. Sehingga didapatkan 0,000073.
Setelah diperoleh interval dan ̇ maka selanjutnya mencari nilai maksimum dari dan dengan menggunakan Persamaan 2.14 dan 2.15 didapatkan : ̇ √ ( ̇ ̇ ) ( ) √ ( ) √ √ √(( ) ( ) )
Selanjutnya dilakukan pembesaran sehingga didapatkan interval berupa keanggotaan dan sebagai berikut :
, - , -
Setelah diperoleh interval dan , kemudian merancang keanggotaan dan dengan cara trial error menggeser fungsi keanggotaan sampai pada hasil yang diharapkan. Sehingga diperoleh fungsi keanggotaan type 2 fuzzy dari dan yang masing-masing ditunjukkan oleh Gambar 4.2 dan Gambar 4.3.
23
Gambar 4. 2Fungsi keanggotaan
Gambar 4. 3 Fungsi keanggotaan
Range pada fungsi keanggotaan dan didapatkan dari hasil respon sistem pertama sebelum diberi gangguan.
Nilai control input secara umum ditentukan dengan menyesuaikan kemampuan dari motor DC. Pada Tugas Akhir ini fungsi keanggotaan nilai dirancang sedemikian sehingga diperoleh seperti pada Gambar 4.4.
24
Gambar 4. 4 Fungsi keanggotaan
Selanjutnya mengimplementasikan perancangan sistem kendali T2FSMC ke program Matlab. Perancangan dilakukan dengan menggunakan Simulink Matlab sehingga diperoleh rangkaian simulink untuk T2FSMC dapat dilihat pada gambar dibawah ini.
Gambar 4. 5 Diagram blok T2FSMC
Pada rancangan T2FSMC diperlukan nilai gain1, gain2 dan gain3 dimana diperoleh dari trial and error, dengan tujuan utama untuk memperoleh performasi terbaik pada sistem. Setelah
25 dilakukan beberapa pengujian diperoleh nilai gain adalah d1=0.019, d2=0.0035 dan d3=1.
4.3 Perancangan Pengendali PID
Pada sub bab ini, akan dibahas perancangan desain kendali PID untuk kendali posisi sudut pada panel surya agar tetap stabil sesuai dengan nilai setpoint posisi sudut yang diberikan. Sebelum merancang desain kendali terlebih dahulu merancang plant yang akan dikendalikan yaitu posisi sudut dengan menggunakan sistem panel surya. Pada sub bab sebelumnya telah dirancang plant dari sistem panel surya.
Selanjutnya, dengan menggunakan plant pada gambar 4.4 akan dirancang desain pengendali PID. PID merupakan sebuah sistem kendali yang mempunyai tiga komponen utama yaitu Proporsional, Integrator, Derivatif dengan tiga gain . Untuk merancang sistem kendali PID terlebih dahulu menentukan gain yang sesuai dengan persamaan :
( ) 0 ( ) ∫ ( ) ( ) 1 (4.17)
Dengan ( ) adalah selisih antara nilai pengukuran dan setpoint. Sedangkan parameter pada kendali PID diperoleh dengan trial dan error sampai mendapatkan kinerja gain yang sesuai dengan yang diinginkan.
Setelah mendapatkan gain pengendali PID selanjutnya akan dilakukan simulasi dengan menggunakan Simulink Matlab. Diagram blok yang dirancang untuk simulasi posisi sudut panel surya ditampilkan pada gambar 4.6.
26
( ) ( ) ( ) ( ) + -
Gambar 4. 6 Diagram blok PID
( ) merupakan setpoint yang diberikan pada sistem ( ) merupakan error kendali PID, yaitu selisih
antara kerluaran sistem atau heading ( ) dan ( ) atau dapat dirumuskan ( ) ( ) ( ).
( ) merupakan sinyal dari keluaran kendali PID yang akan digunakan pada plant panel surya.
Perancangan desain kendali PID dengan menggunakan Simulink Matlab ditunjukkan oleh gambar 4.7.
Gambar 4. 7 Desain kendali PID
Pada gambar 4.7 plant diberikan kontrol PID dengan nilai parameter dengan cara trial error menggunakan tuning pada Matlab. Kemudian diberikan setpoint sebesar 0,000073 untuk dilakukan simulasi dengan menggunakan Simulink Matlab.
Pada simulasi, dilakukan trial dan error sebanyak 5 kali untuk mendapatkan hasil terbaik dan digunakan beberapa nilai parameter yang diambil dari tabel 4.1, yaitu:
27 4.5 Perbandingan Hasil Simulasi
Berikut merupakan hasil simulasi dari pengendali T2FSMC yang dilakukan selama 20 detik dengan setpoint 0,000073.
Gambar 4. 8 Simulasi T2FSMC
Pada gambar 4.8 menunjukkan bahwa hasil simulasi pada pengendali T2FSMC tidak akan memiliki overshoot dari setpoint. Dan mendekati setpoint pada waktu 0,6437 detik.
Kemudian dilakukan uji simulasi pada pengendali PID dengan menggunakan metode tuning dan dilakukan dua kali dan diberi setpoint 0,000073.
Percobaan pertama :
Tabel 4. 2 Nilai parameter PID pertama 0.05
0.108 -0.002
28
Gambar 4. 9 Hasil simulasi PID pertama
Dari gambar 4.9 terlihat bahwa sistem mulai mendekati setpoint pada waktu 4,5544 detik dengan melalui sebuah overshoot.
Percobaan kerdua :
Tabel 4. 3Nilai parameter PID kedua 0.05
0.108 -0.0023
2.62
29
Begitu juga pada gambar 4.10 terlihat bahwa sistem mulai mendekati setpoint pada waktu 1,7874 detik dengan melalui sebuah overshoot.
Setelah didapatkan hasil kedua pengendali, maka dilakukan perbandingan simulasi antara kedua pengendali. Uji simulasi dilakukan selama 20 detik. Sehingga didapatkan hasil berikut :
Gambar 4. 11 Perbandingan T2FSMC dan PID
Dari gambar 4.15 terlihat bahwa pengendali T2FSMC lebih baik dalam menuju setpoint dibandingakan dengan pengenali PID karena pada T2FSMC tidak menghasilkan overshoot.
4.5 Perbandingan Hasil Pengambilan Data Pada Panel Surya Pada sub bab ini akan dijelaskan mengenai pengambilan data secara langsung pada panel surya. Pengambilan data bertujuan untuk membandingakan hasil simulasi menggunakan Simulink
30
Matlab dengan hasil real dari panel surya. Data yang diambil dimulai dari jam 09.00 sampai jam 15.00 dan dilakukan selama tiga hari pada masing-masing pengendali.
Berikut merupakan hasil pengambilan data dari panel surya :
Gambar 4. 12 Perbandingan kecepatan sudut panel surya
Dari gambar 4.16 terlihat bahwa pengendali T2FSMC lebih baik daripada pengendali PID. Dikarenakan kecepatan sudut pada PID memiliki overshoot yang sangat besar dibandingkan dengan kecepatan sudut pada T2FSMC. Hasil merupakan hasil setelah diberi setpoint sebesar 0,000073.
Setelah didapatkan hasil simulasi antara pengendali T2FSMC dan pengendali PID dan didapatkan juga hasil dari eksperimen, kemudian dibandingkan antara hasil simulasi dan eksperimen. Berikut merupakan hasil perbandingan antara simulasi dan eksperimen :
31
Gambar 4. 13 Perbandingan kecepatan sudut T2FSMC eksperimen dan simulasi
Gambar 4. 14Perbandingan kecepatan sudut PID eksperimen dan simulasi
32
Untuk informasi tambahan, berikut merupakan hasil data voltase dan arus pada prototype panel surya :
Gambar 4. 15 Perbandingan voltase pada panel surya
Pada gambar 4.17 terlihat bahwa hasil data voltase pada T2FSMC didapatkan lebih stabil daripada pengendali PID.
Gambar 4. 16 Perbandingan voltase pada baterai
Pada gambar 4.18 terlihat hasil bahwa data voltase pada baterai, PID memiliki osilasi lebih banyak dan besar daripada T2FSMC.
33
Gambar 4. 17 Perbandingan voltase pada beban
Begitu juga voltase pada beban terlihat bahwa hasil pada gambar 4.19 menunjukkan T2FSMC bekerja lebih stabil daripada data pengendali PID.
Gambar 4. 18 Perbandingan arus pada panel surya
Pada gambar 4.20 terlihat bahwa hasil data arus panel T2FSMC didapatkan lebih stabil daripada data pengendali PID.
34
Gambar 4. 19 Perbandingan arus pada baterai
Pada gambar 4.21 terlihat hasil data arus pada baterai bahwa menggunakan pengendali T2FSMC memiliki arus yang lebih besar dibandingkan dengan pengendali PID.
Gambar 4. 20 Perbandingan arus pada beban
Pada gambar 4.22 terlihat hasil data arus pada beban bahwa menggunakan pengendali T2FSMC memiliki arus yang lebih besar dibandingkan dengan pengendali PID.
Sehingga dapat disimpulkan bahwa hasil eksperimen menunjukkan pengendali T2FSMC memiliki hasil yang lebih baik daripada pengendali PID baik dari segi posisi sudut, voltase, dan arus.
BAB V PENUTUP 5.1 Kesimpulan
Berdasarkan hasil analisis dan perbandingan yang telah dilakukan pada dua sistem pengendali yaitu T2FSMC dan PID pada plant panel surya maka didapatkan :
1. Pengendali T2FSMC dan PID terbukti dapat diterapkan pada sistem prototype panel surya, baik secara simulasi maupun secara eksperimen.
2. Dengan simulasi dan eksperimen menunjukkan bahwa hasil dari sifat kecepatan sudut pada T2FSMC lebih baik dibandingkan dengan PID karena pada pengendali PID menimbulkan overshoot yang sangat besar sedangkan pengendali T2FSMC menimbulkan overshoot tetapi tidak sebesar PID.
3. T2FSMC memiliki kekurangan yaitu membutuhkan waktu yang cukup lama dalam proses running pada simulasi jika dibandingkan dengan pengendali PID.
5.2 Saran
Berdasarkan analisis data, pembahasan dan kesimpulan yang telah dilakukan, saran pada tugas akhir ini adalah melakukan pengujian lebih lanjut rancangan pengendali T2FSMC dan PID untuk sistem-sistem lainnya untuk mengetahui lebih lanjut kinerja sistem kendali T2FSMC dan PID. Kemudian pada panel surya dapat diberikan fluxmeter untuk mengukur intensitas cahaya, karena pada pengambilan data mengabaikan cuaca atau intensitas cahaya dalam data yang didapatkan. Sehingga data yang didapatkan lebih baik atau akurat untuk dibandingkan.
36
37 DAFTAR PUSTAKA
[1] Iswanto, W. (2010), Perancangan dan Simulasi Sistem Kontrol Posisi pada Panel Surya dengan Menggunakan Metode Fuzzy Sliding Mode Control (FSMC), Tugas Akhir Jurusan Matematika, FMIPA ITS, Surabaya.
[2] Rizan, R. (2008), Analisis dan Perancangan Sistem Pengendali pada Menggunakan Metode Fuzzy Sliding Mode Control, Tugas Akhir Jurusan Matematika, FMIPA ITS, Surabaya.
[3] Zhang, H. dan Liu, D. (2006), Fuzzy Modeling and Fuzzy Control. Boston: Birkhäuser
[4] Kuo, C. (1998), Teknik Kontrol Automatik Jilid 1, Prenhallindo, Jakarta.
[5] Efprianto, Y. (2015), Perancangan dan Simulasi Sistem Pengendali Panel Surya dengan Meode Type 2 Fuzzy Sliding Mode Control, Tugas Akhir Jurusan Matematika, FMIPA ITS, Surabaya.
[6] Ali, M. (2004), Pembelajaran Perancangan Sistem Kontrol PID dengan Software Matlab, Jurnal Edukasi, Yogyakarta. [7] Mardlijah. , dkk. (2015), On Designing Of The Driven
System Control Of Solar Panels Using Type 2 Fuzzy Sliding Mode Control (T2FSMC), Yogyakarta
[8] Abadi, I. (2016), Kombinasi Dual Tracking Method Pada penjejak Matahari Dua Sumbu Dengan Kontrol Logika Fuzzy Berbasis Particle Swarm Optimization, Disertasi Jurusan Teknik Elektro, FTI ITS, Surabaya.
[9] Mardlijah, Jazedie, A., Santoso, A. dan Widodo, B. (2013), 'A New Combination Method of Fire y Algorithm and T2FSMC for Mobile Inverted Pendulum Robot', Journal of Theoretical and Applied Information Technology 47, 2. [10] Mardlijah, Abdillah, M., Jazedie, A., Santoso, A. dan
Widodo, B. (2011), 'Performance Enhancemet of Inverted Pendulum System by Using Type 2 Fuzzy Sliding Mode Control (T2FSMC)', International Conference of Electrical Engineering and Information.
38
[11] Mardlijah, Jazedie, A., Widodo, B., Santoso, A. Dan Abdillah, M. (2013), 'Design og T2FSMC Controller with Manimum Gain Scale Factor by Optimizing Membership Function Using FireFly Algorithm on Mobile Inverted Pendulum', International Review of Automatic Control (I.RE.A.CO.) 6, 4
[12] Prandita, B.S. (2017), Identifikasi Parameter Model Matematika Pada Penggerak Prototype Panel Surya, Tugas Akhir Jurusan Matematika, FMIPA ITS, Surabaya.
[13] Rochman, D.A (2013), Modul Kontrol Temperatur Air Berbasis PID Menggunakan Matlab Simulink, Tugas Akhir Jurusan Elektro, Politeknik Negri Semarang.
[14] Mardlijah, dkk. (2016). Pengembangan Tipe 2 Fuzzy Sliding Mode Control (T2FSMC) dan Proportional Integral Derivative (PID) Pada Kontrol Posisi Panel Surya Untuk Meningkatkan Effisiensi Sistem Panel Surya, Laporan Penelitian, Surabaya.
LAMPIRAN A
Berikut merupakan source code dari simulasi pada pengendali PID. v=8; time=8; J=0.00009; B=0.000025; R=18.2214; L=0.000866; K=0.030941093; open_system('PID.mdl');
sim('PID.mdl',time);
figure (1) x=PID(:,1); y=PID(:,2); z=PID(:,3);
plot(x,y,'r-',x,z,'b-'); title('Simulasi PID'); xlabel('Time');
grid on
40
41 LAMPIRAN B
Berikut merupakan source code dari simulasi pada pengendali T2FSMC.
% Membuat form fuzzy dengan judul T2fuzzy dan type fuzzy mamdani
fis = newfistype2('T2fuzzy','mamdani');
% mendefinisikan input beserta nama input serta range
% addvartype2 untuk membuat varibel (input/output) pada IT2fis
% karena ada 2 input maka kita harus mendefinisikan ke dua input tersebut %inteval keanggotaan
a=[0.000008 0.00003 0.4]; %input 1 (Sp)
fis = addvartype2(fis,'input','Sp',[-0.0003 0.0003]);
%input 2 (d)
fis = addvartype2(fis,'input','d',[0 0.003]); % output
fis = addvartype2(fis,'output','U',[-20 20]); %% input 1 fungsi keanggotaan Sp pada IT2FIS fis =
addmftype2(fis,'input',1,'NB','itrapatype2' ,[0.0005+a(1) 0.00037+a(1) 0.00027+a(1) 0.0002+a(1) 0.0005a(1) 0.00037a(1) -0.00027-a(1) -0.0002-a(1) 0.95]);
fis = addmftype2(fis,'input',1,'NM','itritype2', [0.00027+a(1) 0.0002+a(1) 0.00013+a(1) -0.00027-a(1) -0.0002-a(1) -0.00013-a(1)]);
fis = addmftype2(fis,'input',1,'NS','itritype2', [0.0002+a(1) 0.00013+a(1) 0.00005+a(1) -0.0002-a(1) -0.00013-a(1) -0.00005-a(1)]);
fis = addmftype2(fis,'input',1,'NZ','itritype2', [0.00013+a(1) 0.00005+a(1) 0.00005+a(1) -0.00013-a(1) -0.00005-a(1) 0.00005-a(1)]);
42
fis = addmftype2(fis,'input',1,'PZ','itritype2', [0.00005+a(1) 0.00005+a(1) 0.00013+a(1) -0.00005-a(1) -0.00005-a(1) 0.00013-a(1)]); fis = addmftype2(fis,'input',1,'PS','itritype2', [ 0.00005+a(1) 0.00013+a(1) 0.0002+a(1) 0.00005-a(1) 0.00013-a(1) 0.0002-a(1)]);
fis = addmftype2(fis,'input',1,'PM','itritype2', [ 0.00013+a(1) 0.0002+a(1) 0.00027+a(1) 0.00013-a(1) 0.0002-a(1) 0.00027-a(1)]); fis =
addmftype2(fis,'input',1,'PB','itrapatype2',[ 0.0002+a(1) 0.00027+a(1) 0.00037+a(1) 0.0005+a(1) 0.0002-a(1) 0.00027-a(1) 0.00037-a(1) 0.0005-a(1) 0.95]);
%% input 2 fungsi keanggotaan d pada IT2FLC fis =
addmftype2(fis,'input',2,'Z','itrapatype2', [-0.004+a(2) -0.0035+a(2) 0+a(2) 0.0006+a(2) -0.004-a(2) -0.0035-a(2) 0-a(2) 0.0006-a(2) 0.95]);
fis = addmftype2(fis,'input',2,'S','itritype2', [0+a(2) 0.0006+a(2) 0.001+a(2) 0-a(2) 0.0006-a(2) 0.001-a(2)]);
fis = addmftype2(fis,'input',2,'M','itritype2', [0.0006+a(2) 0.001+a(2) 0.0015+a(2) 0.0006-a(2) 0.001-a(2) 0.0015-a(2)]);
fis =
addmftype2(fis,'input',2,'B','itrapatype2',
[0.001+a(2) 0.0015+a(2) 0.0035+a(2) 0.004+a(2) 0.001-a(2) 0.0015-a(2) 0.0035-a(2) 0.004-a(2) 0.95]);
%% fungsi keanggotaan output (u) pada IT2FLC fis =
addmftype2(fis,'output',1,'NB','itrapatype2', [-26+a(3) -21+a(3) -16+a(3) -11+a(3) -26-a(3) -21-a(3) -16--21-a(3) -11--21-a(3) 0.95]);
fis =
[-43 16+a(3) -11+a(3) -7+a(3) -16-a(3) -11-a(3) -7-a(3)]);
fis =
addmftype2(fis,'output',1,'NS','itritype2', [-11+a(3) -7+a(3) -5+a(3) -11-a(3) -7-a(3) -5-a(3)]);
fis =
addmftype2(fis,'output',1,'NZ','itritype2', [-7+a(3) -5+a(3) 5+a(3) -7-a(3) -a(3) 5-a(3)]);
fis =
addmftype2(fis,'output',1,'PZ','itritype2', [-5+a(3) [-5+a(3) 7+a(3) -5-a(3) 5-a(3) 7-a(3)]);
fis =
addmftype2(fis,'output',1,'PS','itritype2', [5+a(3) 7+a(3) 11+a(3) 5-a(3) 7-a(3) 11-a(3)]);
fis =
addmftype2(fis,'output',1,'PM','itritype2', [7+a(3) 11+a(3) 16+a(3) 7-a(3) 11-a(3) 16-a(3)]);
fis =
addmftype2(fis,'output',1,'PB','itrapatype2', [11+a(3) 16+a(3) 21+a(3) 26+a(3) 11-a(3) 16-a(3) 21-a(3) 26-a(3) 0.95]);
%% Keluaran gambar figure(1)
plotimftype2(fis,'input',1); ylabel('Degree of Membership'); xlabel('Membership Function of Sp'); figure(2)
plotimftype2(fis,'input',2); ylabel('Degree of Membership'); xlabel('Membership Function of d'); figure(3)
plotimftype2(fis,'output',1); ylabel('Degree of Membership'); xlabel('Membership Function of U');
44 %%rules ruleList=[ ... 1 4 8 1 1 1 3 8 1 1 1 2 8 1 1 1 1 8 1 1 2 4 8 1 1 2 3 8 1 1 2 2 8 1 1 2 1 7 1 1 3 4 8 1 1 3 3 8 1 1 3 2 7 1 1 3 1 6 1 1 4 4 8 1 1 4 3 7 1 1 4 2 6 1 1 4 1 5 1 1 5 4 1 1 1 5 3 2 1 1 5 2 3 1 1 5 1 4 1 1 6 4 1 1 1 6 3 1 1 1 6 2 2 1 1 6 1 3 1 1 7 4 1 1 1 7 3 1 1 1 7 2 1 1 1 7 1 2 1 1 8 4 1 1 1 8 3 1 1 1 8 2 1 1 1 8 1 1 1 1]; %%masukkkan rule fis=addrule(fis,ruleList); writefistype2(fis,'T2fuzzy.fis'); fis=readfistype2('T2fuzzy.fis')
45 BIODATA PENULIS
Moch. Hafiyyan Rijal atau biasa dipanggil Fiyan terlahir di Bangkalan, 08 Juni 1993. Penulis telah menempuh pendidikan di SD Negeri Kemayoran 1 Bangkalan, SMP Tahfidz Al-Amien Sumenep dan SMA Unggulan Darul Ulum 2 BPP-T RSBI.
Penulis yang mempunyai kegemaran tenis meja, travelling, dan bermain game, saat ini sedang menempuh pendidikan tinggi di Institut Teknologi Sepuluh Nopember (ITS), Jurusan Matematika, Fakultas Matematika dan Ilmu Pengetahuan Alam. Bidang minat yang sedang ditekuni penulis adalah bidang minat Terapan yang terdiri atas Riset Operasi dan Pengolahan Data (ROPD) dan Permodelan Matematika.
Jika ingin memberikan saran, kritik, dan diskusi mengenai Laporan Tugas Akhir ini, bisa melalui email [email protected].
Semoga bermanfaat.

![Gambar 2. 7 Struktur dasar pengandali Type 2 Fuzzy Logic Komponen utama dapat diuraikan sebagai berikut [11] : 1](https://thumb-ap.123doks.com/thumbv2/123dok/4480325.2989444/29.629.153.516.82.244/gambar-struktur-pengandali-fuzzy-komponen-diuraikan-sebagai-berikut.webp)