Pengujian
Software
McGegas Untuk Gerakan Dasar Manusia Berbasis
Bio
Vision Hierarchy
Koko Pradiko, Mochamad Hariadi, I Ketut Edi Purnama
Institut Teknologi Sepuluh Nopember, Fakultas Teknologi Industri, Jurusan Teknik Elektro Kampus ITS Sukolilo, Surabaya 60111, INDONESIA
Email : [email protected] Abstrak
McGegas adalah motion capture software pertama buatan Indonesia. McGegas terdiri dari tiga bagian besar. Yang pertama adalah mocap (motion capture) software. Yang kedua adalah animation database engine, dan yang ketiga adalah render farm Motion capture. Dengan software McGegas, gerakan aktor manusia sebagai model untuk objek 3D dapat ditangkap (capture) dari beberapa kamera yang mampu menangkap gerakan 14 buah marker pada 30 fps (frame per second). Hasil dari proses capture tersebut lalu ditransformasikan menjadi gerakan model 3D yang diinginkan. Saat ini untuk menangkap gerakan manusia (aktor), motion capture McGegas menggunakan delapan buah single kamera yang terpasang secara statik pada delapan posisi berbeda pada ruangan tertutup yang memiliki luas 3x3 m2.
Mc Gegas merupakan motion capture software yang akan diuji performansinya dengan pola gerakan dasar manusia secara umum. Performansi yang diuji yaitu kemampuan sistem motion capture berpenanda aktif (Active Marker) dalam menangkap ragam dan kecepatan gerakan. Gerakan manusia yang memiliki tingkat kecepatan tertentu dan keunikan yang hanya dimiliki oleh manusia merupakan obyek yang akan diteliti lebih jauh dalam pengembangan software Mc Gegas.
Kata kunci : Motion Capture, McGegas, BVH.
I. Pendahuluan
Perkembangan dan implementasi teknologi informasi dan komputer sudah meluas ke berbagai bidang. Mulai dari implementasi pada bidang pengaturan otomatis, bidang telekomunikasi, pendidikan, bisnis, internet, dan juga pada bidang
entertainment. Implementasi pada bidang pendidikan dapat melalui pembuatan iklan berupa animasi yang interaktif maupun melalui game pendidikan yang berupa simulasi kehidupan dan bencana pada suatu permainan computer (computer game) dan simulasi.
Salah satu pemanfaatan dari kemajuan komputer grafik adalah animasi karakter tiga dimensi (3D). Berbagai macam bentuk karakter dapat dibentuk dengan memiliki kesamaan dengan bentuk kehidupan pada dunia nyata. Karakter ini memiliki ruas tubuh yang diatur dan diprogram menggunakan aplikasi yang dapat mengimport dan mengeksport format file BVH (Bio Vision Hierarchy). Secara umum, program game engine dan animasi yang ada saat ini hanya dapat
meng-import file berformat BVH saja, Oleh karena itu diperlukan suatu aplikasi yang dapat menunjang pemanfaatan motion capture.
Tantangan dari peniruan bentuk dan gerakan dari object adalah dapat menggantikan bentuk kompleks dari object sesungguhnya. Tingkah laku (behavior) dari suatu object khususnya pada lokasi
public area, yaitu berjalan, berlari, dan diam adalah bagian dari perubahan kompleks posisi dan rotasi suatu object. Pada animasi 3D (three dimension) perubahan tersebut sangat penting untuk memperoleh kesan nyata (realistic).
Metode yang digunakan untuk membuat gerakan dan menghubungkan ruas tubuh antar
bagian karakter adalah pola berbasis Bio Vision Hierarchy. Pola ini berisi tentang dua informasi utama yaitu hirarki dari skeleton system (system tulang) dan motion (gerakan) individu pada manusia. Dalam tugas akhir ini, akan dilakukan pengujian software Mc Gegas menggunakan pola gerakan dasar manusia untuk animasi karakter manusia.
II. Dasar Teori A. Software Testing
Software testing merupakan investigasi yang dilakukan untuk memberikan stakeholder dengan informasi tentang kualitas produk atau jasa sedang diuji. Software testing juga dapat dinyatakan sebagai proses untuk memvalidasi dan memverifikasi bahwa program software / aplikasi / produk:
i.Memenuhi persyaratan bisnis dan teknis yang yang dipandu desain dan pengembangan; ii.Bekerja seperti yang diharapkan, dan
iii.Dapat diimplementasikan dengan karakteristik yang sama.
Software testing, tergantung pada metode pengujian yang digunakan, dapat diterapkan pada setiap saat dalam proses pembangunan. Namun, sebagian besar upaya uji terjadi setelah persyaratan yang telah dibuat dan proses pengkodean telah selesai. Dengan demikian, metodologi tes diatur oleh metodologi pengembangan adopsi perangkat lunak. Model pengembangan perangkat lunak yang berbeda-beda akan memfokuskan upaya uji pada
titik-titik yang berbeda dalam proses pembangunan. Model-model pembangunan yang lebih baru sering menggunakan tes yang mendorong pengembangan dan menempatkan porsi peningkatan pengujian di tangan developer, sebelum mencapai sebuah tim penguji formal. Dalam model yang lebih tradisional, sebagian besar terjadi setelah pelaksanaan tes persyaratan yang telah dibuat dan proses pengkodean telah selesai. Software testing
memiliki tiga tujuan utama: verifikasi, validasi, dan menemukan cacat. [12]
B. V-Model Software Testing
Software testing terlalu penting untuk ditinggalkan sampai akhir proyek, dan pengujian V-Model masuk ke dalam siklus pengembangan perangkat lunak. Dalam sebuah diagram V-Model, hasil V ke bawah dan kemudian naik, dari kiri ke kanan menggambarkan urutan dasar pembangunan dan kegiatan pengujian. Model menyoroti keberadaan berbagai tingkat pengujian dan menggambarkan cara masing-masing berhubungan dengan tahap pengembangan yang berbeda. Model ini menggambarkan bagaimana masing-masing tahap selanjutnya harus memverifikasi dan memvalidasi kerja yang dilakukan pada tahap sebelumnya, dan cara kerja yang dilakukan selama pengembangan digunakan untuk memandu fase pengujian individu. Keterkaitan ini memungkinkan mengidentifikasi kesalahan penting, kelalaian, dan masalah lainnya.
Gambar 2.1. V-Model Software Testing V-Model testing mengidentifikasi lima tahap pengujian perangkat lunak, masing-masing dengan jenis uji tertentu yang terkait dengannya.
Phase Guiding Document Test Type
Development Phase
Technical Design Unit Testing
System and Integration Phase
Functional Design System Testing Integration Testing User Acceptance Phase Business Requirements User Acceptance Testing Implementation Phase
Business Case Product Verification Testing
Regression Testing berlaku untuk semua phase
C. Oklusi
Ketika mengamati objek 3D dari dua posisi pandangan yang berbeda beberapa rincian mereka terlihat untuk semua posisi pandangan, beberapa terlihat hanya untuk satu, danada yang benar-benar tak terlihat. Masalah poin tak terlihat adalah karena geometri adegan dan oklusi obyek dalam adegan. Situasi seperti digambarkan dalam gambar 2.5 dimana obyek B1 sebagian occluded (tertutup) oleh objek B2. Sebuah titik ml, yang merupakan gambar kiri sebuah titik M 3D pada permukaan objek B1, tidak dapat dicocokkan dengan titik lain pada gambar kanan karena tidak terlihat pada kamera kanan.
Gambar 2.2 Mutual Occlusion Object [2]
Ini adalah contoh dari setengah oklusi teropong. Selain itu, titik mr virtual diganti oleh nr
titik, yang sebenarnya adalah sebuah gambar dari titik 3D N yang milik objek B2. Sebaliknya, titik N
dapat cocok karena kedua titik gambar yang terlihat pada dua kamera. Dalam sistem nyata masalah oklusi tidak dapat dihindarkan. Jadi, perlu untuk mempertimbangkan fakta ini dalam pengembangan metode (pencocokan). Terutama penting untuk menemukan titik occluded dan menyediakan cara untuk melakukan interpolasi kedalaman nilai-nilai di tempat tersebut.
III. Desain Sistem
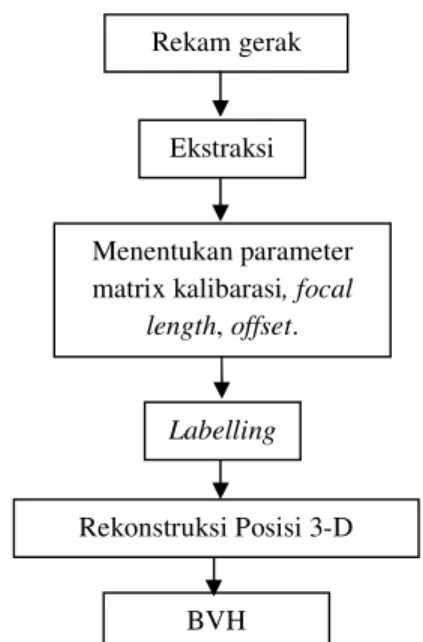
Metodologi dari penelitian ini secara keseluruhan dapat dilihat pada gambar 3.1 Berdasarkan pada gambar blok diagram tersebut akan dilakukan pengujian pada software McGegas.
Gambar 3.1 Blok Diagram Software Mc Gegas
A. Marker
berjumlah 14 buah yang dipasang pada titik yang diinginkan pada bagian tubuh seorang aktor sesuai dengan struktur tulang manusia pada software McGegas. Marker ini berfungsi untuk menandai titik koordinat tubuh pada software McGegas. Dari titik inilah diperoleh informasi koordinat gerakan tubuh pada koordinat dunia (X,Y,Z). Tiap marker terdiri dari sebuah LED (Light Emitting Diode) yang ditanam pada sebuah pemantul (reflector). Marker ini membutuhkan tegangan sebesar 9 Volt DC agar cahaya yang dipancarkan LED dapat dibaca (capture) oleh kamera.
Gambar 3.2 Posisi Marker (berwarna putih) Pada Aktor.
B. Kalibrasi Kamera
Langkah awal dalam memulai aktivitas motion capture seperti rekam gerak, ekstraksi, labelling, dan rekonstruksi berawal dari kalibrasi kamera. Kalibrasi kamera dilakukan untuk memperoleh parameter intrinsik dan ekstrinsik dari suatu
kamera. Setiap kamera memiliki parameter yang tidak sama karena posisi kamera, pencahayaan, dan sudut pandang (Point of view) yang berlainan. Kalibrasi ini diperlukan untuk palacakan titik (point tracking) dan jarak (focal length). Pada ruangan
mocap yang memiliki luas 3x3 m2, diperlukan warna biru sebagai latar belakang karena warna dasar kulit manusia tidak mengandung warna biru, hal ini agar diperoleh perbedaan intensitas warna antara latar belakang (background) dengan warna kulit aktor. Pengambilan gambar pada objek papan catur (chessboard) untuk mendeteksi tepi garis hitam dan putih papan catur seperti pada gambar 3.3.
Gambar 3.3 Chessboard untuk kalibrasi kamera
C. Rekam Gerak
Proses rekam gerak adalah proses saat aktor mulai melakukan gerakan yang akan diolah. Delapan buah kamera merekam gerakan aktor secara real time dalam waktu yang hampir bersamaan. Pencahayaan pada ruangan terbatas hanya untuk satu pencahayaan pada aktor. Proses ini menggunakan software CaptureNet untuk merekam dalam bentuk video format .AVI. dengan spesifikasi yang mendukung dari kamera dengan resolusi VGA (640x480) dan frame rate maksimal 30 fps (frame per second). Untuk menandai awal gerakan, aktor menggunakan tepukan tangan menggunakan kliper berwarna cerah sebagai penanda mulai melakukan privat gerakan.
D. Ekstraksi
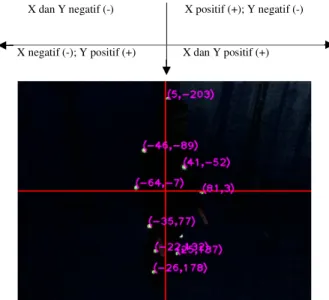
Proses ekstraksi video (.avi) hasil rekam gerak bertujuan untuk Tahap ini bertujuan untuk mencari koordinat titik pusat dari setiap marker yang telah didapatkan. Titik koordinat marker akan ditransformasikan dengan koordinat dunia (world coordinate) sehingga akan didapatkan koordinat marker dalam x,y,dan z. Bagian pada layar tampilan menampilkan sumbu koordinat (X,Y), titik marker terbagi menjadi empat bagian melalui pembagian empat zona sumbu koordinat (X,Y) dengan melakukan invers pada sumbu Y (atas minus). Format output dari fitur ekstraksi ini yaitu .mtx (File Motion) berisi file text informasi koordinat gerakan tiap frame.
Rekam gerak
Labelling
BVH Ekstraksi
Menentukan parameter matrix kalibarasi, focal
length, offset.
X dan Y negatif (-) X positif (+); Y negatif (-)
X negatif (-); Y positif (+) X dan Y positif (+)
Gambar 3.4 Ekstraksi Dengan Sumbu Y Atas Minus
E. Parameter (Matrix Kalibrasi, Focal Length, Offset)
Parameter secara terpisah diperoleh dengan cara menentukan matrix kalibrasi, focal length, dan
offset. Matrix kalibrasi dan focal length yang digunakan merupakan hasil percobaan dari kalibrasi pada chessboard, parameter matrix kalibrasi untuk setiap kamera: i. Kamera 1 0.6978 -0.37298 0.61153 -1058.1; -0.71622 -0.35093 0.60322 -867.38; -0.010391 -0.85891 -0.51201 1331.1; 0 0 0 1 ii. Kamera 2 0.99848 -0.045512 0.031002 255.09; -0.051315 -0.56465 0.82373 -1108.8; -0.019984 -0.82407 -0.56613 1346.4; 0 0 0 1 iii. Kamera 3 0.72475 0.32119 -0.60957 1567.4; 0.68889 -0.35481 0.6321 -964.44; -0.01326 -0.87803 -0.47841 1376.7; 0 0 0 1 iv. Kamera 4 0.01698 0.4789 -0.87771 1818.9; 0.99985 -0.011691 0.012964 242.01; -0.0040528 -0.87779 -0.47903 1395.6; 0 0 0 1 v. Kamera 5 -0.67642 0.36524 -0.63958 1706.1; 0.73637 0.35281 -0.57731 1484.4; 0.014796 -0.86147 -0.5076 1416.9; 0 0 0 1 vi. Kamera 6 -0.99913 0.040995 -0.007942 1372.51; 0.027721 0.50893 -0.86036 1718.7; -0.031229 -0.85983 -0.50962 1372.2; 0 0 0 1 vii. Kamera 7 -0.7641 -0.31697 0.56186 -969.54; -0.64488 0.35235 -0.67822 1547.8; 0.017007 -0.88056 -0.47363 1364.4; 0 0 0 1 viii. Kamera 8 -0.060112 -0.49936 0.86431 -1201.6; -0.9981 0.041558 -0.045407 340.47; -0.013245 -0.8654 -0.50091 1330.5; 0 0 0 1
Parameter focal length untuk setiap kamera: 1. Kamera 1 = -569.9743. 2. Kamera 2 = -572.6571. 3. Kamera 3 = -583.8463. 4. Kamera 4 = -586.5577. 5. Kamera 5 = -585.8004. 6. Kamera 6 = -609.7125. 7. Kamera 7 = -564.6852. 8. Kamera 8 = -588.7144.
Perbedaan waktu awal (t0) pengambilan gambar menjadi hal yang tidak dapat dihindarkan, terutama bila sistem masih dipegang oleh seorang operator. Hal ini menyebabkan perbedaan yang sangat signifikan pada panjang frame dari setiap kamera. Oleh karena itu, mekanisme untuk menyamakan titik awal frame yaitu dengan menginisialisasi kapan seorang aktor melakukan prosedur gerakan awal pada proses rekam gerak. Atau dengan kata lain, hal ini dilakukan secara manual dengan memberi input offset pada setiap frame pada kamera.
F. Labelling
Sebuah struktur tubuh manusia hasil dari
motion capture belum memiliki identitas. Titik yang direkam (capture) merupakan titik pertemuan tulang atau engsel yang ada ditubuh sang aktor yang akan dijadikan keymotion terhadap pergerakan itu sendiri. Titik yang diambil harus diberi identitas berupa huruf abjad (A hingga N) untuk mewakili bagian tubuh manusia seperti pada gambar 3.5. Penggunaan labelling bertujuan untuk membantu pemberian identitas secara komputasional sehingga mempercepat penamaan, atau secara manual yaitu dengan memberi input secara manual pada titik marker yang mengalami oklusi.
Gambar 3.5 Penamaan Stuktur Tubuh Manusia Pada Software McGegas.
G. Rekonstruksi Posisi 3-D
Proses rekonstruksi posisi 3-D adalah proses yang memetakan segala informasi yang telah diolah menjadi sebuah produk awal dari motion capture. Setiap titik marker belum saling terhubung menjadi garis yang membentuk karakter, melalui proses ini akan dilakukan rekonstruksi posisi 3 dimensi terhadap titik-titik marker tersebut menjadi sebuah bagian utuh berupa karakter stickman yang dapat dilihat pada gambar 3.6.
Gambar 3.6 Gambar (kiri) aktor dan (kanan) Rekonstruksi
H. Bio Vision Hierarchy (BVH)
Bio Vision Hierarchy terdiri dari dua unsur utama, yaitu hirarki dan motion (gerakan). Sebuah file BVH dirancang untuk menyimpan gerakan yang dihasilkan oleh motion capture. Ini adalah cara ringkas untuk menyimpan gerak, hal itu tidak tergantung pada rincian geometri. Namun data ini khusus untuk file hirarki dan dimensi tubuh karakter, sehingga meskipun dapat mentransfer gerakan dari satu karakter ke yang lain, tetap harus diskala untuk masing-masing model karakter. Pada gambar 3.7 adalah contoh BVH seorang yang berjalan.
Gambar 3.7 Tampilan BVH Manusia Berjalan
IV. Implementasi Sistem dan Eksperimen
Pengujian ini dilakukan dengan memanfaatkan sumber daya pada laboratorium motion capture
yang terdiri dari:
1. Komputer (8 unit), dengan spesifikasi: A. Prosesor : Intel(R) Core2Duo E4500 (R)
CPU 2.20GHz.
B. Memori : 2048 MB RAM.
C. Sistem Operasi : Microsoft Windows 7 Ultimate.
D. GPU (Graphic Processing Unit) : Nvidia GeForce8500 GT 512 MB.
E. Hardisk : 180 GB.
2. Kamera webcam (8 unit), dengan spesifikasi: A.Software : CaptureNet (video).
B. Resolusi : VGA (640x480). C. Frame rate : 30.00 fps. D. Built in microphone. 3. Marker (14 unit).
A.Konsumsi Daya : 9 Volt DC (battery). B. Reflektor : silinder.
C. Tipe : LED (Light Emitting Diode). 4. Software motion capture Mc Gegas.
A. Pengujian Terhadap Kecepatan Pola Gerakan Dasar Manusia
Pengujian ini dilakukan dengan melakukan gerakan dasar yang terbagi menjadi beberapa jenis pola gerakan. Gerakan yang dihasilkan oleh proses rekonstruksi posisi 3-D dibandingkan dengan gerakan asli dari aktor untuk menguji performance
sistem motion capture McGegas. 1) Percobaan Gerakan Jalan Berputar.
Pola gerakan Rekonstruksi Kecepatan Gerakan (frame/detik)
Siku kanan mengikuti tangan kanan ke belakang
Berhasil 21
Siku kiri mengikuti tangan kiri kedepan
Berhasil 21
Lutut kanan mengikuti kaki kanan kedepan
Berhasil 20
Pinggul kiri kedepan Berhasil 21
Lutut kiri condong kebelakang
Pundak kanan dan dada berotasi terhadap pundak
kiri
Berhasil 90
Tabel 4.1 Percobaan Rekonstruksi Gerakan Jalan Berputar
Dari hasil pengujian pada tabel 4.1 dapat dianalisa bahwa pola gerakan pada jalan berputar memiliki tingkat keberhasilan rekonstruksi sangat tinggi. Dengan kecepatan pola gerakan yang relatif rata-rata > (Lebih besar) dari 15 fps (kecepatan sedang), sehingga posisi marker dapat dicapture
dengan baik dari semua kamera. Posisi Marker
Sebenarnya
Hasil Rekonstruksi Jalan Berputar
Tabel 4.2 Perbandingan Rekonstruksi Jalan Berputar
2) Percobaan Gerakan Jalan Ditempat
Pola gerakan Rekonstruksi
Kecepatan Gerakan (frame/detik)
Siku kiri mengikuti tangan kiri menekuk
kedepan
Berhasil 18
Siku kanan mengikuti tangan kanan menekuk
kebelakang
Berhasil 18
Lutut kanan keatas Berhasil 17
Lutu kanan kebawah Berhasil 17
Kaki kanan keatas Berhasil 17
Kaki kanan kebawah Berhasil 17
Lutut kiri keatas Berhasil 17
Lutut kiri kebawah Berhasil 17
Kaki kiri keatas Berhasil 17
Kaki kiri kebawah Berhasil 17
Tabel 4.3 Hasil Rekonstruksi Jalan ditempat Dari hasil pengujian pada tabel 4.3 dapat dianalisa bahwa pola gerakan pada jalan ditempat memiliki tingkat keberhasilan rekonstruksi sangat tinggi. Dengan kecepatan pola gerakan yang relatif rata-rata setengah dari maksimal 30 fps (kecepatan sedang), sehingga posisi marker dapat dicapture
dengan baik dari semua kamera. Posisi Marker
Sebenarnya
Hasil Rekonstruksi Gerakan menendang
Tabel 4.4 Perbandingan Rekonstruksi Gerakan Menendang
3) Percobaan Gerakan Menendang
Pola gerakan Rekonstruksi Kecepatan Gerakan (frame/detik)
Siku kiri mengikuti tangan kiri menekuk
kedepan
Berhasil 18
Siku kanan mengikuti tangan kanan menekuk
kedepan
Berhasil 18
Kaki kanan menendang kedepan
Gagal 10
Kaki kanan ditarik ketempat semula
Gagal 11
Tabel 4.5 Hasil Rekonstruksi Gerakan Menendang Dari hasil pengujian pada tabel 4.5 dapat dianalisa bahwa pola gerakan menendang memiliki tingkat keberhasilan rekonstruksi rendah. Dengan kecepatan pola gerakan yang relatif < 30 fps (kecepatan tinggi), sehingga posisi marker hanya terbaca oleh 3 kamera. Hal ini juga menunjukkan bahwa untuk dapat menghasilkan rekonstruksi pada 1 titik marker, maka marker harus dapat dibaca minimal oleh 4 kamera.
Posisi Marker Sebenarnya
Hasil Rekonstruksi Gerakan Menendang
Tabel 4.6 Perbandingan Rekonstruksi Gerakan menendang
B. Pengujian Jumlah Pola Gerakan Manusia Terhadap Oklusi.
1) Percobaan Gerakan Lompat
Pola Gerakan Oklusi (marker) Oklusi (kamera) Rekonstruksi Semua bagian tubuh merunduk kebawah B, C, D, G, K, dan N 1,3,4,5,6,8 Gagal
Bagian lutut dan kaki menjejak tanah I, K, dan L 2,5,8 Gagal Tubuh meregang keatas (lompat) B 6 Gagal Tubuh mendarat (berdiri) B, J, dan M 6 Berhasil
Tabel 4.7 Oklusi Pada Gerakan Lompat Dari hasil pengujian pada tabel 4.7 dapat dianalisa bahwa pola gerakan lompat memiliki tingkat oklusi cukup tinggi. Dengan tingkat kompleksitas pola gerakan yang cukup tinggi, menyebabkan terjadi banyak oklusi. Hal ini
menunjukkan bahwa untuk dapat menghindari oklusi maka kompleksitas gerakan dikurangi.
Posisi Marker Sebenarnya
Hasil Rekonstruksi Gerakan Lompat
Tabel 4.8 Perbandingan Rekonstruksi gerakan Lompat
2) Percobaan Gerakan Jatuh
Pola Gerakan Oklusi (marker) Oklusi (Kamera) Rekonstruksi Berdiri B 6 Berhasil Tubuh merunduk kebawah B, C, D, G, K, dan N 1,3,4,5,6,8 Gagal Tubuh terlentang A,D,H,I,,K, N 2, 4, 5, 6 Gagal
Tabel 4.9 Oklusi Pada Gerakan Jatuh
Dari hasil pengujian pada tabel 4.9 dapat diketahui bahwa pola gerakan menendang memiliki tingkat keberhasilan rekonstruksi rendah. Posisi tubuh terlentang menyebabkan marker sulit terbaca oleh banyak kamera, sehingga posisi marker hanya terbaca oleh 3 kamera. Hal ini membuktikan bahwa untuk dapat menghasilkan rekonstruksi pada 1 titik marker, maka marker harus dapat dibaca minimal oleh 4 kamera. Selain itu posisi tubuh mempengaruhi hasil rekonstruksi pada beberapa titik area mocap.
Posisi Marker Sebenarnya
Hasil Rekonstruksi Gerakan Jatuh
Tabel 4.10 Perbandingan Rekonstruksi Gerakan Jatuh
V. Kesimpulan dan Saran A. Kesimpulan
Setelah melalui tahapan implementasi dan pengujian sistem, maka diperoleh beberapa kesimpulan antara lain :
1. Pergerakan yang ditangkap (capture) oleh kamera sangat dipengaruhi oleh kecepatan gerak dari aktor, artinya semakin cepat aktor
bergerak maka gerakan yang dapat ditangkap (capture) oleh kamera semakin kecil karena gambar menjadi kabur (blur).
2. Oklusi merupakan masalah yang menjadi perhatian pada motion capture McGegas, rekonstruksi gerakan yang dihasilkan terlewatkan pada titik terjadi oklusi.
3. Software motion capture McGegas terbukti sudah mendukung sebuah sistem low cost motion capture.
4. Secara umum, motion capture lebih cepat dari pekerjaan manual, dengan pertimbangan naturalisasi gerakan yang dihasilkan.
5. Hasil lebih real time artinya waktu pergerakannya akan sama dengan waktu gerakan yang dihasilkan didalam aplikasi komputer.
6. Gerakan yang dihasilkan belum cukup natural dan akurat sesuai dengan gerakan alami objek yang dicapture, khususnya pada gerakan yang memiliki kecepatan serta mobilisasi yang tinggi seperti berlari, lompat, memukul, menendang, dan sebagainya.
7. Komplektisitas pembuatan animasi jauh berkurang bukan hanya terhadap objek yang bersangkutan namun juga terhadap efek yang ditimbulkan oleh lingkungan maupun objek lainnnya, seperti objek gerakan yang berbenturan dengan objek lain, objek gerakan melompat yang dipengaruhi oleh grafitasi dan lain sebagainya.
8. Mengurangi biaya produksi animasi manual, karena waktu terminimalisasi serta proses lebih efektif maka beban biaya proses produksi akan menjadi ringan secara signifikan.
B. Saran
1. Diperlukan kamera yang memiliki resolusi dan frame rate yang lebih tinggi agar dapat menangkap gerakan dengan kecepatan tinggi, selain itu juga diperlukan komputer dengan spesifikasi yang sama dengan komputer lainnya baik dari sisi hardware dan operating system.
2. Menambah jumlah marker pada titik yang sering terjadi oklusi.
3. Saat melakukan gerakan, aktor harus memperhatikan kecepatan dan ruang gerak karena keterbatasan ruang dan kamera. Melakukan gerakan cepat seperti berlari, lompat, dan menendang, sebaiknya dilakukan lebih pelan untuk mengurangi efek blurring atau kabur pada titik marker tertentu.
4. Untuk menangkap gerakan dasar manusia yang lebih kompleks seperti menunjuk dengan jari tangan, melambai, serta ekspresi wajah. Solusinya dengan membuat struktur baru yang disertai dengan penambahan marker
pada bagian kompleks tubuh manusia seperti jari tangan dan wajah.
Daftar Pustaka
[1] Cyganek Boguslaw dan Siebert Paul J, 2009.
An Introduction to 3D Computer Vision Techniques And Algorithms. Department of Electronics, AGH University of Science and Technology, Poland and Department of Computing Science, University of Glasgow, Scotland, UK.
[2] Holmboe Dennis, 2008. The Motion Capture Pipeline. Department of Mathematics, Natural, and Computer Science.
[3] Chaudhuri, S. and Rajagopalan, A.N. (1999)
Depth from Defocus: A Real Aperture Imaging Approach, Springer Verlag. [4] Trucco, E. and Verri, A. (1998) Introductory
Techniques for 3-D Computer Vision, Prentice-Hall. [5] ...,2007.Blender(software), http://en.wikipedia.org/wiki/Blender_(softw are). [6] Online http://en.wikipedia.org/wiki/Motion_capture . 2010-05-20. [7] Online http://qbheadlines.com/inovasi_bwh.php?aid =304&flag=1&baru=0&cat=6. 2010-05-20. [8] Zhang, Z. (1999) A Flexible New Technique
for Camera Calibration. Technical Report MSR-TR-98-71, Microsoft Research, Microsoft Corporation (www.microsoft.com). [9] Online http://en.wikipedia.org/wiki/Focal_length. 2010-05-20. [10] Online http://tyrell-innovations-usa.com. [11] Online http://www.metamotion.com.
VI. Biodata Penulis
Koko Pradiko dilahirkan di Surabaya, Jawa Timur pada pada tahun 1986 dari pasangan Bapak dr. Gatot Chusni dan Ibu Dian Dwi Herjoeliani. Penulis merupakan putra pertama dari tiga bersaudara, memiliki seorang adik laki-laki, Yulibar Husni, dan seorang adik perempuan, Althafa Husni. Penulis menjalani pendidikan mulai TK hingga SD di PETRA 11 Surabaya, kemudian melanjutkan pendidikan di SMP Negeri 4 Surabaya setelah itu di SMA Negeri 2 Surabaya. Penulis sangat berminat pada animasi, game, dan elektronika, karena itu setelah lulus dari pendidikan diploma, penulis melanjutkan pendidikan sarjana di Jurusan Teknik Elektro ITS dengan bidang studi Teknik Komputer dan Telematika.
![Gambar 2.2 Mutual Occlusion Object [2]](https://thumb-ap.123doks.com/thumbv2/123dok/2427402.2754668/2.918.527.773.518.696/gambar-mutual-occlusion-object.webp)