LAPORAN KEMAJUAN
PENELITIAN UNGGULAN ITS
(Penelitian Terapan Multi-Disiplin)
DANA ITS TAHUN 2020
(TAHUN PERTAMA DARI TIGA TAHUN)
Pengembangan
Search and Rescue Autonomous Boat
(iBoat)
: Misi dan Integrasi
Tim Peneliti :
Ketua
: Ir. Wasis Dwi Aryawan, M.Sc., Ph.D. (Teknik Perkapalan, FTK)
Anggota 1 : Sufian Imam Wahidi, S.T., M.Sc.
(Teknik Perkapalan, FTK)
Anggota 2 : Ir. Tri Achmadi Ph.D.
(Teknik Transportasi Laut, FTK)
Anggota 3 : Dony Setyawan, S.T., M.Eng.
(Teknik Perkapalan, FTK)
DIREKTORAT RISET DAN PENGABDIAN KEPADA MASYARAKAT
Daftar Isi
Daftar Isi ... i
Daftar Tabel ... ii
Daftar Gambar ... iii
Daftar Lampiran ... iv
BAB I RINGKASAN ... 1
BAB II HASIL PENELITIAN ... 2
2.1. Pola Desain Kapal ... 2
2.2. Operasi Search and Rescue ... 3
2.3. Kapal Search and Rescue ... 6
2.4. Kapal Autonomous ... 7
2.5. Sistem Navigasi Kapal ... 9
2.6. Sistem Autopilot ... 9
BAB III STATUS LUARAN ... 21
BAB IV PERAN MITRA ... 22
BAB V KENDALA PELAKSANAAN PENELITIAN ... 23
BAB VI RENCANA TAHAPAN SELANJUTNYA ... 24
BAB VII DAFTAR PUSTAKA ... 25
BAB VIII LAMPIRAN ... 26
Daftar Tabel
Tabel 1. Pembagian daerah Operasi SAR Indonesia ... 4 Tabel 2. Pembagian daerah Operasi SAR Indonesia ... 5
Daftar Gambar
Gambar 1. Pola desain kapal ... 2
Gambar 2. Daerah operasi SAR Indonesia ... 4
Gambar 3. System operasi SAR Indonesia ... 5
Gambar 4. Jenis kapal SAR di Basarnas ... 7
Gambar 5. Sistem Autopilot iBoat ... 10
Gambar 6. Blok diagram system autopilot rudder ... 10
Gambar 7. Gerakan Proportional Dan Pergerakan Ketika Mendapat Gangguan ... 10
Gambar 8. Iboat concept ... 10
Daftar Lampiran
BAB I RINGKASAN
Indonesia merupakan negara yang rawan kecelakaan yang terjadi di darat, laut dan udara. Kecelakan dapat berasal dari bencana alam, kesalahan operasional manusia dan kesalahan manajemen koordinasi. Kecelakan yang terjadi di laut merupakan kecelakaan dengan jumlah korban jiwa yang hilang terbanyak yang terjadi karena sangat sudah melakukan deteksi lokasi, melakukan pencarian dan penyelamatan karena harus berhadapan dengan gelombang dan angin yang tidak bersahabat. Dalam penelitian ini secara umum akan diakan dibuat dan didesain kapal Autonomous yang dapat digunakan untuk melakukan search and recue korban di laut dengan menerapkan autopilot untuk mempercepat respon agar mengurangi dan mengurangi resiko tim penolong. Penelitian ini melibatkan beberapa disiplin ilmu Naval architecture, Marine Engineering, Robotic Engineering
dan Control Engineering. Secara khusus pada penelitian ini merupakan pengabungan sub-sub penelitian yang lain yang digabung menjadi satu kesatuan. Waktu penelitian dilakukan selama lima tahun dengan target tahun pertama mendesain dan membuat kapal autonomous untuk keperluan
search korban yang ada dilaut, tahun kedua mendesain kapal autonomous untuk keperluan recue
korban yang ada dilaut yang membutuhkan ukuran kapal lebih besar. Selain itu direncanakan mendapatkan paten tentang desain kapal Search and Rescue Autonomous Boat (iBoat).
Kata Kunci: SAR, Autonomous, iBoat
Kata Kunci: SAR, Autonomous, iBoat
Ringkasan penelitian berisi latar belakang penelitian,tujuan dan tahapan metode penelitian, luaran yang ditargetkan, kata kunci
BAB II HASIL PENELITIAN
Kapal merupakan sarana transportasi air yang dapat mengangkut barang, kendaraan dan barang didalam ruang muatnya. Dibandingkan dengan transportasi lain sarana ini mempunyai keunggulan mampu mengangkut dalam jumlah yang berat dan banyak. Sarana ini juga sangat diperlukan di negara-negara kepulauan seperti Indonesia. Sarana ini sudah dikenal oleh bangsa Indonesia sejak dahulu kala sehingga dikenal sebagai bangsa maritime terbesar di Asia Tenggara. Kejayaan ini perlu dibangkitkan kembali dengan penguasaan dan pengembangkan ilmu pengetahuan dan teknologi terkini. iBOAT merupakan teknologi pengabungan beberapa disiplin ilmu pengetahuan menjadi masa depan kapal-kapal sekarang. Adapung secara teori iBOAT dapat dijabarkan sebagai berikut:
2.1.Pola Desain Kapal
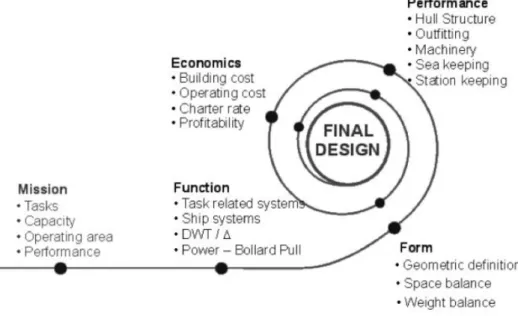
Desain merupakan sesuatu yang sangat penting dalam pembangunan suatu kapal, desain akan menentukan kualitas dan performance dari suatu kapal. Banyak pola dalam mendesain produk, akan tetapi khusus untuk pola desain kapal menggunakan pola spiral ship design yaitu sebagai berikut [1]
Gambar 1. Pola desain kapal
Gambar diatas menunjukan pola desain kapal yang semula lurus selnjutnya diteruskan dalam bentuk spiral yang penjelasanya sebagai berikut: [2]
Mission: ini merupakan langkah awal dalam mendesain kapal, pada langkah ini ditentukan permintaan pemilik kapal dengan melakukan studi kelayakan kapal yang akan didesain. Studi
ini dilakukan dengan mengumpulkan data-data kegunaan kapal, kapasitas ruang muat, area operasi kapal dan performance kapal yang diinginkan.
Function: hasil studi kelayakan akan menghasilkan system-sitem apa saja yang perlu disediakan oleh kapal, banyaknya DWT yang akan diangkut dikapal dan perkiraan daya mesin yang akan digunakan dikapal.
Form: selanjunya dipilih geometri ukuran utama kapal yang meliputi Panjang, lebar, tinggi, sarat diikuti dengan penentuan rasio ukuran utama dan koefesient-koefesien geometri kapal. Kesesuaian kapasitas ruang muat dengan muatan yang diangkut dikapal juga dipertimbangkan sehingga kapal tidak kelebihan atau kekurangan kapasitas yang diangkutnya.
Performance: dalam tahp ini didesain bentuk struktur lambung kapal yang sesuai dengan bentuk lambung, didesain peralatan dan perlengkapan apa saja yang akan dipakai dikapal, selain itu juga dilakukan desain permesinan sebagai penggerak utama kapal. Desain performance ketahanan kapal terhadap gelombang dan lingkungan luar juga dihitung dengan menggunakan seakeeping.
Economic: selain pertimbangan teknis harus dipenuhi selanjutnya dilakukan Analisa / perhitungan ekonomis antara lain: biaya pembangunan kapal, operasional kapal, charter dan keuntungan. Biaya pembangunan kapal meliputi: biaya baja, biaya permesinan, biaya perlatan, biaya kelisterikan dan biaya perlengkapan. Biaya operasional meliputi: biaya bahan bakar, biaya air tawar, biaya makanan, gaji crew dan biaya lain yang harus dibayarkan saat kapal berlayar. Pola spiral desain diatas juga ada beberapa literatur yang agak berbeda dimana tidak terdapat bagian yang lurus tetap hanya berbentuk spiral murni, dimana dalam spiral terbagi menjadi bagian-bagian utama yaitu: Concept Design, Preliminary Design, Contract Design dan Detail Design. Pada tahap
concept design dilakukan studi: mission, function, form, performance dan economic selnjutnya akan diulang pada tahap Preliminary Design, Contract Design dan Detail Design. Concept design merupakan studi kelayakan tentang kapal yang akan dibangun. Preliminary design merupakan desain awal pendetailan dari concept design. Contract design merupakan contract design antara pemilik dan galangan kapal yang akan membangun kapal tersebut. Dan detail design merupakan gambar detail sekala sebenarnya atau disebut gambar produksi[3] [4].
2.2.Operasi Search and Rescue
Indonesis sebagai negara yang rawan bencana alam agar penangnannya maksimal dibagi menjadi dibagi menjadi 2 daerah operasi type: A disebelah barat dan B disebelah timur. Daerah operasi type
A terdiri dari 16 daerah, dan type C terdiri 12 secara total terdapat 38 daerah operasi yang dapat dilihat pada table dibawah ini [5].
Tabel 1. Pembagian daerah Operasi SAR Indonesia
Daerah tersebut diplot dalam peta Indonesia dapat dilihat pada peta dibawah ini. Semua daerah di Indonesia telah terpetakan Kawasan darat dipulau dan di laut. Legenda peta tanda bintang menunjukan potensi bencana yang terjadi dan tanda lingkaran orange menunjukan pos SAR yang bertanggungjawab. Terdapat 77 pos SAR yang tersebar disluruh Indonesia yang tersebar dari Sabang sampai Merauke.
Gambar 2. Daerah operasi SAR Indonesia
Dari data yang didapatkan dari BASARNAS didapatkan data kecelakaan darat, laut dan udara pada tahun 2018. Dari data terdapat lima macam jenis kecelakaan antara lain: pesawat udara, kapal, bencana, kondisi membahayakan dan kecelakan khusus. Dari hasil investigasi terdapat 2.146 kejadian kecelakaan kapal, kecelakaan kapal merupakan sumber kecelakaan kedua tersbesar dibandingkan sumber lain. Dari hasil investigasi banyaknya korban hilang dialami oleh kecelakaan kapal, karena untuk melakukan pencarian dan penyelamatan harus berhadapan dengan angin dan gelombang yang tidak bersahabat. Untuk itu kapal outonomouse sangat diperlukan untuk melakukan SAR dilaut.
Tabel 2. Pembagian daerah Operasi SAR Indonesia
Kejadian kecelakaan terjadi secara mendadak tidak menunggu korban atau tim penolong siap. Setiap saat diperlukan kesiap siagaan supaya korban jiwa dapat ditekan seminimal mungkin. Teknologi informasi untuk melaporkan kecelakaan secepat mungkin diikuti dengan respon pencarian dan penyelamatan yang tepat dan cepat juga akan menurunkan resiko korban jiwa. Ketika terjadi kecelakaan pesawat akan dilaporkan oleh ELT melalui satelit menuju basarnas, sedangkan kecelakaan kapal laut melalui EPIRB. Teknologi informasi ini sangat berguna untuk menentukan lokasi kecelakaan ketika tidak terdapat terdapat saksi mata. Teknologi informasi yang sekarang ini ada perlu dikembangkan keakurasian karena seringkali kecelakaan di laut tidak ditemukan.
Gambar 3. System operasi SAR Indonesia
Selain dilaporkan melaui teknologi satelit, kecelakaan juga sering dilaporkan secara langsung dengan melihat langsung. Selanjutnya BASARNAS akan berkoordinasi dengan TNI. Polisi, dan Instansi atau swada masyarakat.
2.3.Kapal Search and Rescue
Armada kapal SAR yang dimiliki oleh Badan SAR Nasional (BASARNAS) dikelompokan menjadi 6 (enam) macam berdasarkan panjang dan jangkauannya antara lain [6]:
1. Rescue Ship adalah kapal kelas I versi SAR (panjang >40 M) yang digunakan sebagai sarana pencarian dan pertolongan dilengkapi dengan peralatan SAR;
2. Rescue Boat adalah kapal versi SAR yang digunakan sebagai sarana pencarian dan pertolongan yang dilengkapi dengan peralatan SAR, dan digolongkan berdasarkan ukuran menjadi 3 ( tiga) jenis:
a. Kelas II (panjang 30 s.d. 40 M). Standar Rescue Boat Kelas II; Kapal Rescue Boat Panjang 40m Kapal Rescue Boat Panjang 36m
b. Kelas III (panjang 20 s.d. < 30 M). Standar Rescue Boat Kelas III; c. Kelas IV (panjang 12 s.d. < 20 M). Standar Rescue Boat Kelas IV;
3. Hovercraft adalah kendaraan yang berjalan diatas bantalan udara (air cushion) yang dilengkapi dengan baling - baling udara sebagai alat pendorong, untuk sarana pencarian dan pertolongan di perairan, lumpur dan rawa-rawa;
4. Rigid Inflatable Boat (RIB) adalah perahu berbahan dasar karet dengan lunas fiber glass serta dilengkapi kemudi, yang digunakan sebagai sarana pencarian dan pertolongan di area perairan/ laut;
5. Rubber Boat adalah perahu berbahan dasar karet yang dapat dikembangkan dan dilipat, yang dilengkapi dengan motor tempel sebagai sarana pencarian dan pertolongan di area perairan/ laut;
6. Rafting Boat adalah perahu karet tanpa motor tempel, yang decknya tidak terbuat dari material keras sehingga mempunyai kelenturan untuk melintasi sungai yang berbatu-batu/ daerah lokasi banjir.
Kapal kelas I Kapal kelas II
Hovercraft Rigid Inflatable Boat (RIB)
Rubber Boat Rafting Boat
Gambar 4. Jenis kapal SAR di Basarnas
2.4.Kapal Autonomous
Istilah kapal Autonomous atau Unmanned Surface Vehicle (USV) atau Autonomous Surface Vehicle (ASV) dimaksudkan untuk wahana yang dioperasikan pada permukaan air tanpa awak. USV dikendalikan autopilot dengan memberikan perintah- perintah seperti waypoint, melalui Ground Control Station (GCS). USV dapat mengolah data-data pergerakan dan pengamatan lalu mengirimkannya ke GCS secara real time melalui sistem komunikasi nirkabel. USV sebenarnya telah diujicobakan sejak Perang Dunia II, namun belum terlalu dikenal karena kapal-kapal pengintai tanpa awak generasi awal seperti OWL Mk II masih diklasifikasikan sebagai Autonomous Underwater Vehicle (AUV). Dilanjutkan tahun 1944, Kanada mengembangkan konsep torpedo COMOX sebelum penyerangan ke Normandia. Setelah Perang Dunia II penggunaan USV menjadi lebih berkembang, di antaranya untuk mengambil sampel air yang terkena radioaktif setelah pemboman Able dan Baker di Atol Bikini tahun 1946. USV juga sangat berguna dalam bidang
dibandingkan menggunakan radar, namun lebih murah dibandingkan memperbanyak kapal komersial maupun pesawat terbang serta lebih fleksibel daripada yang dapat dilakukan oleh kapal komersial.
Beberapa jenis USV saat ini akan menjadi peralatan yang efisien untuk melakukan patroli, seperti patroli patok-patok perbatasan di laut, perairan dangkal dan di sekitar garis pantai. Sistem ini dapat mengisi kekosongan data yang tidak dapat dilakukan oleh kapal patroli biasa. Untuk berpatroli di patok perbatasan dapat menghadirkan tantangan teknologi tersendiri. Hal ini disebabkan oleh dinamika lingkungan dan lebih rawannya ancaman balik dari para penyelundup ilegal maupun para pencuri ikan illegal. Terlebih kapal-kapal penyelundup yang terbuat dari bahan non logam, akan sangat sulit diidentifikasikan jika menggunakan radar saja, sehingga dibutuhkan pengamatan visul scara langsung untuk mengetahui kondisinya.
Contohnya adalah ASV Global yang mengembangkan USV dengan kode C sweep untuk diaplikasikan dalam berbagai bidang seperti anti ranjau, anti kapal selam, dan pengintaian. Kendaraan ini memiliki kemampuan bermanuver dengan baik, towing, dan ketahanan komponen elektronik yang membuatnya dapat digunakan sebagai pendukung peperangan ranjau. Selain itu, kendaraan ini juga mampu menyebarkan, tracking, dan saling terhubung dengan sistem autopilot lainnya baik USV, ROV, maupun AUV. Kendaraan ini dapat dijalankan dalam metode manual maupun dalam metode autopilot. Untuk mengendalikannya, kendaraan ini dikendalikan melalui darat menggunakan jaringan komunikasi berupa UHF (Ultra Gigh Frequance), L/S Band, maupun Sat-Comms Options Sidescan dan teknologi ASView untuk mengarahkannya. ASV tidak hanyamemiliki kemampuan untuk pengintaian saja, tapi juga dapat digunakan untuk pengejaran target. Untuk itu, kendaraan ini dilengkapi 2 mesin diesel dan kapasitas BBM yang besar yaitu 2300 liter sehingga memiliki kecepatan tinggi hingga 25+ knot serta dapat menjangkau area seluas 230 nm untuk ukuran kapal 10 meter.
Dengan ukurannya yang kecil, maka USV akan mudah dimobilisasi menggunakan kapal konvensional yang lebih besar. Pada prakteknya nanti, kapal konvensional ini dapat difungsikan sebagai kapal induk/pangkalan terapung yang membawahi beberapa USV. USV ini akan dilengkapi kamera pengintai yang akan digunakan untuk memonitor wilayah patrolinya. Kemudian USV ini disebar ke berbagai titik untuk melakukan patroli di wilayah yang telah ditetapkan sesuai koordinat GPS yang telah ditetapkan. Namun GPS memiliki keakuratan yang berbeda-beda tergantung lokasi dari titik koordinat tersebut. Selain itu, keadaan laut juga selalu berubah-ubah tergantung kondisi cuaca dan gelombang
2.5.Sistem Navigasi Kapal
Navigasi adalah ilmu pengetahuan dalam menentukan posisi kapal di laut dengan mengemudikan (steering) kapal secara aman dari suatu tempat ke tempat lain. Sistem navigasi biasanya terdiri dari beberapa perangkat digital maupun analog, untuk yang analog biasanya dilengkapi dengan kompas analog yang dapat mengetahui arah mata angin yang berguna sebagai acuan arah kapal, untuk perangkat digital sudah terdapat GPS atau Global Positioning System yaitu sebuah perangkat yang dapat menerima lokasi keberadaan kapal dengan mengacu pada satelit yang bergerak mengitari bumi. GPS menerima data yang dikirim dari satelit berupa data NMEA 0183. NMEA (National Marine Electronics Association) adalah standar yang digunakan dalam pengiriman data GPS yang berupa protokol data, garis lintang, garis bujur, ketinggian, dan waktu. Kompas digital juga tergolong perangkat digital dimana pemakaiannya harus diintegrasikan kembali pada sebuah sistem sehingga pembacaan arah mata angin dapat dilakukan dan dapat mengetahui arah kapal [7].
2.6.Sistem Autopilot
Sistem autopilot adalah sebuah sistem mekanikal, elektrikal, atau hidraulik yang memandu sebuah kendaraan tanpa campur tangan dari manusia. Umumnya autopilot dihubungkan dengan pesawat, tetapi autopilot juga digunakan di kapal dengan istilah yang sama. Pergerakan kapal dalam mode autopilot dipandu oleh sistem navigasi dan system kontrol. Sistem navigasikapalpada autopilotmenggunakan metode waypoint. Sistem navigasi akan memandu USV bergerak secara teratur mengikuti titik tuju (waypoint) yang telah diatur pada Ground Control Station (GCS).
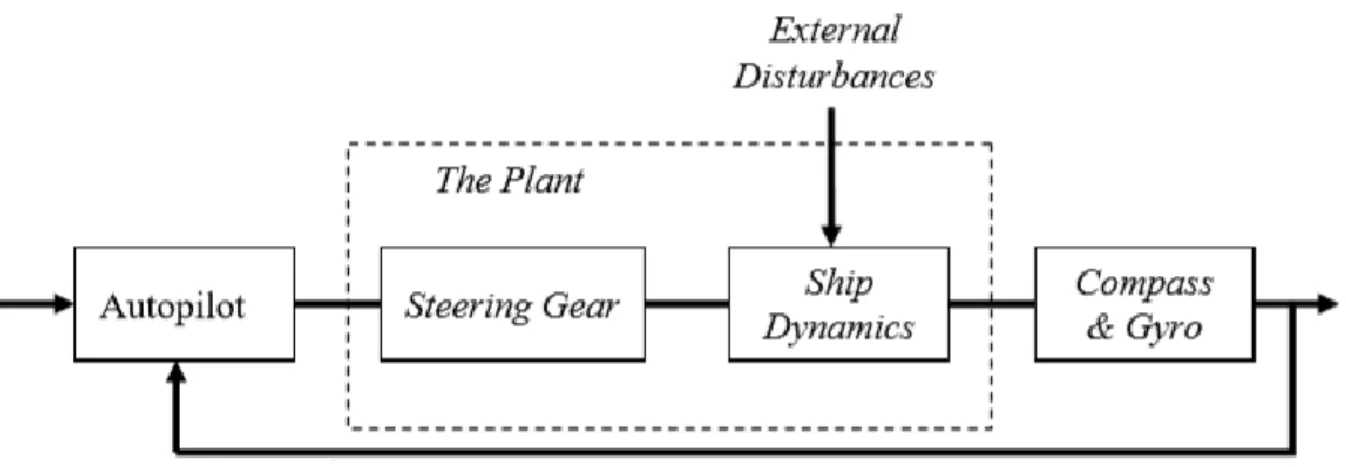
Dalam pergerakan USV, gaya luar seperti angin dan ombak maupun gaya dari dalam seperti ketidakseimbangan putaran kecepatan motor induk akan memberikan pengaruh dalam pergerakannya. Maka dari itu dibutuhkanlah sistem kontrol untuk mengendalikan kapal tetap menuju ke titik tujunya. Dalam studi simulasi sistem kemudi USV, penting bahwa model dinamika sistem yang relatif akurat mempengaruhi kinerja kemudi.Sistem yang dimaksud bias dianggap sebagai kapal dengan kemudiaktuator, yang mengalami gangguan eksternal seperti ditunjukkan pada gambar berikut [8].
Gambar 5. Sistem Autopilot iBoat
Autopilot dirancang untuk mengarahkan USV ke titik tujuan dan memanipulasi rudder sedemikian rupa untuk mengurangi perbedaan antara lintasan yang diinginkan dan lintasan aktual yang
ditempuh USV. Dalam hal ini, autopilot bergantung padasistem kontrol. Pada sistem kontrol dikenal yang namanya PID (Proportional, Integral, dan Derivative).Gambar berikut [9]:
Gambar 6. Blok diagram system autopilot rudder
Faktor-faktor pengganggu menyebabkan arah kapal berbelok hingga terjadi ketidaksesuaian antaralintasan yang diinginkan dan aktual.Pada saat itu terjadi terdeteksierror, USV akan melakukan koreksi danrudder bereaksi untuk membawa perahu kembali ke lintasan yang diinginkan.Namun, saat menuju lintasan yang diinginkan, akan terjadi overshot dan terjadi error lagi kearah sebaliknya. Kemudi USV akan melakukan koreksi lagi dan rudder bereaksi untuk membawa perahu kembali ke lintasan yang diinginkan Hal ini akan terjadi terus menerus dan menyebabkan biaya bahan bakar, waktu tambahan, dan menurunkanefisiensi.
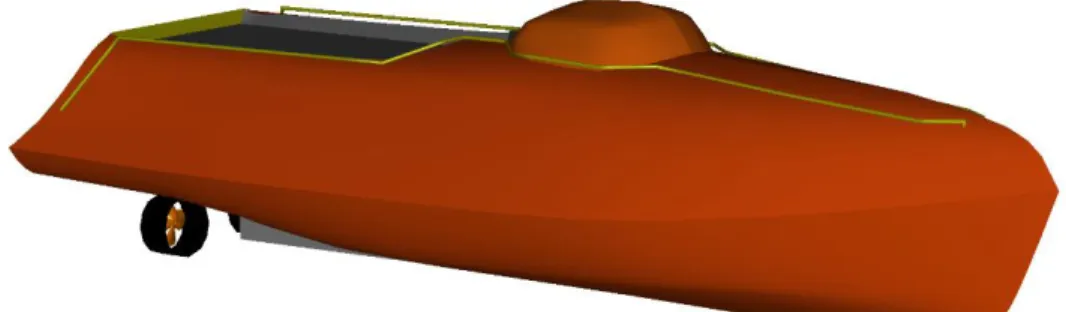
Smart Lifeboat merupakan kapal penyelamat tanpa awak (autonomous) yang didesain dan dibuat untuk meningkatkan keselamatan pelayaran. Smart Lifeboat didesain untuk dapat menyelamatkan kru maupun penumpang dalam keadaan darurat dengan mandiri dan terintegrasi menggunakan pelacakan secara otomatis. Inital design Iboat dapat dilihat pada Gambar 8.
Gambar 8. Iboat concept
Smart Lifeboat dibekali dengan sistem otomasi yang teringrasi dengan Smart Lifejacket
dan coast guard/ SAR di darat. Kapal ini dapat beroperasi secara mandiri (autonomous) dan manual.
Untuk memaksimalkan proses penyelamatan kapal ini memiliki landing dock yang dalam keadaan darurat dapat digunakan sebagai space tambahan untuk korban dan dapat digunakan untuk mengangkut alat keselamatan pendukung seperti Liferaft dan Lifebuoy.
Fitur dan Keunggulan
Smart Lifeboat memiliki beberapa fitur yang mendukung operasi penyelamatan. Fitur dari Smart Lifeboat dapat dilihat pada Gambar 9.
a. Wood Hull
Material lambung menggunakan bahan kayu. Penggunaan bahan kayu dapat memberikan konstruksi yang kuat dan rapi.
b. Motor Listrik
Penggerak kapal menggunakan motor listrik yang supply dayanya menggunakan baterai. c. Watertight Door
Pintu menggunkan jenis pintu kedap air dengan tujuan ketika kapal diluncurkan atau menghadapi ombak yang besar tidak menimbulkan risiko tenggelam.
d. Landing Dock
Dalam keadaan darurat dapat digunakan untuk mengangkut korban atau alat keselamatan lainnya.
e. Navigation Room
Pusat kendali berada diposisi tertinggi dari keseluruhan bangunan kapal dengan tujuan memudahkan proses pengamatan. Pusat kendali ini juga dilengkapi dengan sistem komunikasi yang dapat digunakan untuk berkomunikasi dengan stasiun komunikasi darat atau kapal lain yang terdekat.
f. Automated MOB Searching
Kapal secara otomatis melakukan pencarian man overboard dengan cara mengintregasikan GPS yang ada di Smart Lifeboat sebagai receiver dan di Smart Lifejacket sebagai transmitter. g. Automated Land and Ship Searching
Ketika kapal mengalami insiden kecelakaan Smart Lifeboat akan berperan dalam proses evakuasi. Smart Lifeboat secara otomatis melakukan pencarian daratan atau kapal lain yang terdekat untuk proses evakuasi.
Prosedur Kerja Iboat
a. Ketika Terjadi Kecelakaan Kapal 1. Smart Lifeboat Diluncurkan
Dalam keadaan darurat kapal sepertai kebakaran atau tenggelam, kru dan penumpang masuk kedalam Smart Lifeboat yang kemudian diluncurkan ke laut (overboard) dengan menggunakan metode freefall atau gravity davit. Peluncuran dapat dilihat pada Gambar berikut.
(a) (b) 2. Iboat Membawa Kru dan Penumpang Menjauh dari Kapal
Menjauh dari kapal adalah hal pertama yang harus dilakukan, karena sumber bahaya yang paling dekat harus dihindari. Ilustrasi Smart Lifeboat menjauhi kapal dapat dilihat pada Gambar 3.
3. Iboat Mencari Daratan Terdekat
Setelah Smart Lifeboat aman dari bahaya kecelakaan kapal, selanjutnya adalah proses evakuasi. Proses evakuasi yang pertama adalah mencari daratan terdekat. Smart Lifeboat akan mencari lokasi daratan terdekat secara otomatis yang dapat dilihat pada Gambar 4.
4. Iboat Mencari Lokasi Kapal Lain yang Terdekat
Selain dapat mencari lokasi daratan terdekat, Smart Lifeboat juga akan mencari lokasi kapal lain yang terdekat untuk proses evakuasi. Smart Lifeboat akan membandingkan jarak antara menuju daratan atau menuju kapal terdekat. Smart Lifeboat juga dilengkapi alat komunikasi yang dapat digunakan untuk berkomunikasi dengan stasiun komunikasi atau kapal lain yang terdekat. Ilustrasi Smart Lifeboat mencari lokasi kapal lain terdekat dapat dilihat pada Gambar 5.
b. Digunakan Sebagai Rescue Boat
1. Smart Lifeboat Mencari Korban yang Mengirim Sinyal Pertolongan
Ketika terjadi kecelakaan kapal tidak semua kru dan penumpang dapat menyelematkan diri bersama Smart Lifeboat, maka Smart Lifeboat akan mencari secara otomatis lokasi korban. Ilustrasi pencarian lokasi korban dapat dilihat pada Gambar 6.
2. Iboat Mengevakuasi Korban
Setelah menemukan posisi korban, selanjutnya Smart Lifeboat akan mengevakuasi korban ke tempat yang aman. Ilustrasi evakuasi korban dengan Smart Lifeboat dapat dilihat pada Gambar 7.
Sistem Elektronika Smart Lifeboat
a. Wiring Diagram
Sistem Elektronik terdiri dari 2 aliran, yaitu aliran daya dan aliran data.
1. Aliran Daya (garis merah), bersumber dari 4 baterai Li-Po 4 s. Digunakan untuk memberikan daya untuk ESC, Motor, Microprocessor, Microcontroller, dan sensor.
2. Aliran Data (garis biru), bersumber dari microprocessor dan microcontroller. Digunakan untuk memberikan respon untuk kamera, router, esc, serta sensor (compass dan gps) b. Fungsi Komponen Elektronik Smart Lifeboat
1. Baterai
Smartboat memiliki sumber daya dari 4 baterai Lithium Polymer(Li -Po). Baterai 4 sel yang dapat menghasilkan tegangan sebesar 16.8 V mensuplai 2 Electronic Speed Controller dan 2 Motor T-200. Untuk mensuplai sistem microcontroller, microprocessor, serta sensor pada kapal harus diturunkan menjadi 5V dengan rangkaian regulator tegangan. Untuk pemilihan tipe baterai berupa Lithium Polymer dikarenakan baterai Li-Po dapat memberikan daya yang lebih besar, selain itu lebih aman dan ringan serta fleksibel dikarenakan bisa diatur sesuai kebutuhan.
2. Regulator
Regulator yang digunakan adalah LM2596, digunakan untuk mengatur tegangan output serta menurunkan tegangan dari baterai lippo 4s (16.8v) menjadi tegangan yang diperlukan pada
smartboat (5-7.4 v dan 9-12v). 5-7.4 v digunakan untuk memberikan daya pada microcontroller, microprocessor, serta sendor yang ada. Sedangkan daya sebesar 9-12v sebagai sumber daya bagi router sebagai komunikasi pada kapal dengan user.
3. Microcontroller
mencapai 72 MHz. Beberapa fitur STM32F1 yang dimanfaatkan untuk pengendali kapal ini yaitu PWM (Pulse Width Modulation), UART (Universal Asynchronous Receiver Transmitter) dan Input Capture. PWM digunakan sebagai sinyal pengontrol kecepatan motor T-200. Input Capture digunakan sebagai penerima data dari remote. Mikrokontroler ini memiliki performa yang cukup baik dengan dimensi dan berat yang sangat kecil didukung dengan daya pemrosesan yang cukup cepat.
4. Microprocessor
Sebagai pemroses data berukuran besar yang tidak dapat diolah langsung oleh STM32. Semua data yang diolah microprocessor akan dilanjutkan menuju STM32 antara lain camera yang berperan dalam mengambil data objek. Microprocessor yang digunakan merupaka Raspberry – p. Dalam perannya pada smartboat nantinya sebagai pengolah data besar berupa pengolahan gambar dapat berupa gambar atau sejumlah karakteristik serta parameter yang berkaitan dengan gambar. Data berupa gambar didapatkan dari kamera sebagai sensor utama penglihatan visual dari kapal. Data hasil pengolahan akan dikirim menuju STM32 sebagai mikrokontroler untuk nantinya diteruskan menuju akuator (Motor) yang akan memberi respon berupa gerakan. Serta sebagai media komunikasi antara user dengan smartboat
5. Router
Merupakan alat untuk komunikasi dari kapal dengan server serta user. Dimana di dalam kapal dan server masing masing terdapat masing masing satu router. Untuk router akan terhubung dengan Raspberry – p dalam kapal dalam gunanya berhubungan langsung dengan user. Adanya server berperan dalam memonitoring kinerja kapal sehingga dapat diketahui error yang terjadi pada smartboat. Router akan mendapat cakupan daya sebesar 9-12v dengan menurunkan tegangan yang didapat dari baterai Li-Po 4 Shell.
6. Camera
Sensor utama pada kapal menggunakan kamera. Kamera yang digunakan adalah kamera Logitech, Dengan resolusi kamera 1920x1080. Kinerja cahaya redup yang sangat baik sehingga dapat mendeteksi warna keadan sekitar. Selain itu dengan RightLight™ 2 serta autofocus membuat pemilihan kamera menjadi salah satu opsi utama untuk menjadi sensor dalam pengambilan objek. Dalam kerjanya kamera yang terhubung dengan Raspberry – p, kamera akan bertugas dalam mengambil objek berupa gambar yang ada di sekitar. Data berupa gambar kemudian akan dikirim menuju Raspberry – p yang kemudian akan diolah untuk ditampilkan. Pengolahan data yang didapat berupa koordinat objek serta warna.
7. GPS (Global Positioning System)
GPS (Global Positioning System) adalah sistem satelit navigasi dan penentuan posisi yang dimiliki dan dikelola oleh Amerika Serikat. Sistem ini didesain untuk memberikan posisi dan kecepatan tiga-dimensi serta informasi mengenai waktu, secara kontinyu di seluruh dunia tanpa bergantung waktu dan cuaca, kepada banyak orang secara simultan. Sensor GPS yang akan digunakan adalah Ublox Neo M8N.
8. Compass
Sensor compass akan berbasis pada medan magnet. Sensor yang digunakan adalah DT-Sense 3 Axis Compass, merupakan suatu modul sensor medan magnet yang mengunakan IC hmc5883l. IC hmc5883l merupakan chip yang didesain untuk membaca medan magnet yang cocok untuk aplikasi penunjuk arah dan magnetometry. Magnetometer merupakan suatu sistem yang bekerja atas dasar pendeteksian gaya magnet bumi. Magnetometer ini nanti akan digunakan untuk menentukan arah ketika pengguna sedang pergi ke suatu tempat.
9. ESC (Electronics Speed Control)
ESC (Electronic Speed Control) berfungsi sebagai pengatur kecepatan motor, selain itu juga berfungsi untuk menaikkan jumlah arus yang diperlukan oleh motor. ESC dapat dikatakan juga sebagai drive motor dengan mengeluarkan pulsa untuk T-200 yang berasal dari mikrokontroler.
10.Motor
Merupakan actuator pendorong kapal yang memungkinkan kapal bergerak maju atau mundur. Sistem pendorong utama kapal ini menggunakan 2 buah motor T-200. Motor ini dapat memiliki kecepatan 2000 rpm/volt. T-200 dikendalikan oleh ESC (Electronic Speed Control). ESC mengendalikan motor sesuai masukan sinyal PWM yang didapat dari mikrokontroler. Penggunaan T-200 didasari pada daya tahan motor yang lebih baik serta memiliki power yang lebih besar.
BAB III STATUS LUARAN
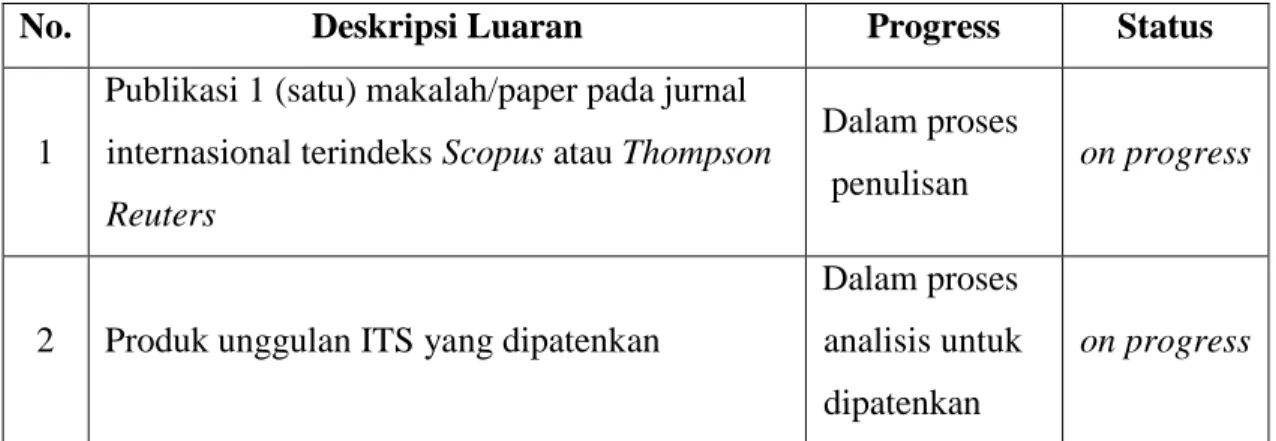
Sesuai dengan ketentuan yang telah ditetapka progress target luaran pada penelitian ini dapat dilihat pada Tabel 3.1.
Tabel 3. 1 Status Luaran
No. Deskripsi Luaran Progress Status
1
Publikasi 1 (satu) makalah/paper pada jurnal internasional terindeks Scopus atau Thompson Reuters
Dalam proses
penulisan on progress
2 Produk unggulan ITS yang dipatenkan
Dalam proses analisis untuk dipatenkan
BAB IV PERAN MITRA
Adapun beberapa Kerjasama yang telah dilakukan oleh mitra sebagai berikut: Kerjasama fabrikasi oleh galangan Gapura dan BTS di Madura dalam bentuk pengelasan dan riset bersama untuk ukuran lambung kapal pertama sebagai referensi desain kapal pembanding
Kerjasama diberikan oleh jotun sebagai pihak penyedia untuk melakukan coating pada kapal
BAB V KENDALA PELAKSANAAN PENELITIAN
Pada penelitian dengan judul Pengembangan Search and Rescue Autonomous Boat (iBoat): Misi
dan Integrasi terdapat berbagai macam kendala pada saat proses penelitian, antara lain sebagai berikut:
1. Mengintegrasikan antara sistem mekanis dan sistem elektris 2. Mengintegrasikan motion kapal dengan otomasi
BAB VI RENCANA TAHAPAN SELANJUTNYA
Berdasarkan progress yang telah selesai dilakukan untuk menunjang ketercapaian tujuan dari penelitian ini dilakukan beberapa langkah adalah sebagai berikut:
Melakukan integrasi sistem autonomous kapal
Finalisasi sistem navigasi kapal
BAB VII DAFTAR PUSTAKA
[1] A. Papanikolaou, Ship design: methodologies of preliminary design. Springer, 2014.
[2] H. M. Gaspar, A. M. Ross, D. H. Rhodes, and S. O. Erikstad, “Handling complexity aspects in conceptual ship design,” in International Maritime Design Conference, Glasgow, UK, 2012.
[3] T. Lamb, “Ship design and construction,” Ed. Thomas Lamb Publ. SNAME ISBN 0-939773-40-6, 2003.
[4] R. Taggart, Ship design and construction. Society of Naval Architects & Marine Engineers, 1980.
[5] Basarnas, “Rakornas BASARNAS: Strategi Penyelenggaraan Operasi.” [Online]. Available: https://bpbd.jakarta.go.id/assets/attachment/document/Rakornas6_BASARNAS_Strategi_Penye lenggaraan_Operasi.pdf.
[6] “Sarana SAR Laut | Official Website Badan Nasional Pencarian dan Pertolongan.” [Online]. Available: http://basarnas.go.id/sarana-sar-laut. [Accessed: 07-Mar-2020].
[7] M. J. J. Suja, S. R. Sulistiyanti, and M. Komarudin, “Sistem Navigasi pada Unmanned Surface Vehicle untuk Pemantauan Daerah Perairan,” Electrician, vol. 11, no. 1, pp. 32–43, 2017.
[8] C. C. Lim, “Autopilot design for ship control,” PhD Thesis, Loughborough University, 1980. [9] E. D. Sugita, “Pembuatan Purwarupa Tes Model Untuk Menguji Sistem Autopilot Pada Unmanned Surface Vehiche (USV),” PhD Thesis, Institut Teknologi Sepuluh Nopember, 2017.
BAB VIII LAMPIRAN
Lampiran 1. Dokumentasi Sea Trial I-Boat ITS
Sea Trial Manual System
LAMPIRAN 1 Tabel Daftar Luaran
Program : Penelitian Unggulan ITS
Nama Ketua Tim : Ir. Wasis Dwi Aryawan, M.Sc., Ph.D.
Judul : Pengembangan Search and Rescue Autonomous Boat (iBoat): Misi dan Integrasi
1.Artikel Jurnal
No Judul Artikel Nama Jurnal Status Kemajuan*) *) Status kemajuan: Persiapan, submitted, under review, accepted, published
2. Artikel Konferensi
No Judul Artikel Nama Konferensi (Nama Penyelenggara, Tempat,
Tanggal)
Status Kemajuan*)
*) Status kemajuan: Persiapan, submitted, under review, accepted, presented
3. Paten
No Judul Usulan Paten Status Kemajuan 1 Usulan Sistem Autonomous Boat Progress
*) Status kemajuan: Persiapan, submitted, under review
4. Buku
No Judul Buku (Rencana) Penerbit Status Kemajuan*) *) Status kemajuan: Persiapan, under review, published
5. Hasil Lain
No Nama Output Detail Output Status Kemajuan*) *) Status kemajuan: cantumkan status kemajuan sesuai kondisi saat ini
6. Disertasi/Tesis/Tugas Akhir/PKM yang dihasilkan
No Nama Mahasiswa NRP Judul Status*) *) Status kemajuan: cantumkan lulus dan tahun kelulusan atau in progress