1
BAB I
PENDAHULUAN
I.1. Latar Belakang
Sistem proyeksi peta merupakan bagian yang penting dalam sebuah peta karena pemilihan sistem proyeksi peta berpengaruh pada ketelitian koordinat setiap titik di peta. Koordinat setiap titik-titik di permukaan bumi yang ditampilkan di dalam peta diperoleh ketika proses georeferensi. Proses georeferensi harus memperhatikan elipsoid yang akan digunakan dan proyeksi petanya. Pemilihan elipsoid harus didefinisikan saat melakukan georeferensi karena ada beberapa jenis elipsoid dan setiap elipsoid mempunyai nilai parameter yang berbeda sehingga dalam suatu produk peta pendefinisian elipsoid yang digunakan harus seragam. Sebuah peta merupakan gambaran permukaan di bidang datar sedangkan data yang sebenarnya disajikan merupakan informasi permukaan bumi berupa bidang tidak beraturan yang dimodelkan dengan bidang elipsoid.
Ada beberapa jenis sistem proyeksi peta. Setiap sistem proyeksi peta memiliki karakteristik yang berbeda. Setiap karakteristik tersebut mempertimbangkan jarak, luas, bentuk atau sudut untuk dipertahankan akurasi datanya. Oleh karena itu, perlu memilih sistem proyeksi peta yang sesuai dengan tujuan dan jenis peta.
Pada penelitian ini akan membahas tentang perbandingan dari sistem proyeksi peta Polieder dan UTM pada pembuatan peta skala besar ( > 1:5000). Alasan memilih sistem proyeksi Polieder karena sistem proyeksi ini pernah digunakan di Indonesia dan perubahan jarak dan sudut hampir tidak ada pada daerah yang terletak dalam satu lembar bagian derajat. Selanjutnya, sistem proyeksi UTM merupakan sistem proyeksi yang sering digunakan pada pembuatan berbagai jenis peta di Indonesia.
Studi kasus pada penelitian ini yaitu area Selat Sunda pada letak geografis 50 50‟ 55.81” LS – 60 2‟ 38.96” LS dan 1050 45‟ 48. 97” BT – 1050 55‟ 54.42” BT. Pada proyeksi peta Polieder, area penelitian terletak pada tiga LBD yaitu LBD nomor 33/XXXVI, 34/XXXVI, dan 34/XXXVII. Oleh karena itu, pada proses perhitungan titik-titik poligon perlu dilakukan transformasi koordinat dari ketiga LBD tersebut
menjadi satu LBD supaya semua titik berada dalam satu sistem koordinat. Area Penelitian terletak di zone 48 M pada proyeksi UTM dengan koordinat bujur meridian tengah sebesar 1050. Penelitian ini akan membahas tentang perbandingan dari nilai distorsi sudut dan jarak pada peta dengan sistem proyeksi Polieder dan UTM. Parameter yang digunakan untuk membandingkan sistem proyeksi Polieder dan UTM yaitu nilai distorsi sudut berupa konvergensi meridian (γ), koreksi (t-T), dan nilai distorsi jarak berupa faktor skala (k). Perbandingan tersebut dilakukan dengan mempertimbangkan beberapa hal. Pertama, posisi area penelitian yang melalui 3 LBD pada proyeksi Polieder sehingga bisa menimbulkan perambatan kesalahan saat perhitungan transformasi koordinat antar LBD. Akan tetapi, pada proyeksi UTM area penelitian terletak dalam satu zone sehingga tidak perlu melakukan transformasi koordinat. Kedua, jarak area penelitian dengan meridian tengah dan paralel standar pada proyeksi Polieder lebih dekat daripada jarak area penelitian dengan meridian tengah dan meridian standar proyeksi UTM.
I.2. Rumusan Masalah
Area penelitian tidak berada dalam satu LBD atau melalui tiga LBD pada proyeksi Polieder sedangkan pada proyeksi UTM terletak dalam satu sistem zone. Oleh karena itu, pada proyeksi Polieder perlu melakukan transformasi koordinat sedangkan pada proyeksi UTM tidak perlu melakukan transformasi koordinat. Selanjutnya, posisi area penelitian terhadap meridian tengah dan meridian standar pada proyeksi UTM lebih jauh daripada posisi area penelitian terhadap meridian tengah dan paralel standar proyeksi Polieder sehingga kemungkinan distorsi sudut dan jarak lebih besar pada proyeksi UTM. Berdasarkan permasalahan tersebut maka disusun pertanyaan penelitian:
1. Bagaimana perbandingan besar nilai koreksi konvergensi meridian(γ”), koreksi (t-T), dan faktor skala(k) pada peta yang menggunakan sistem proyeksi Polieder dan sistem proyeksi UTM?
2. Sistem proyeksi mana yang lebih baik digunakan antara proyeksi Polieder dengan proyeksi UTM untuk pembuatan peta skala besar (> 1:5000) pada studi kasus penelitian ini?
I.3. Tujuan Penelitian
Tujuan yang ingin diperoleh dari penelitian ini adalah mengetahui besaran nilai konvergensi merididan(γ”), koreksi (t-T) dan faktor skala (k) pada peta yang bersistem Proyeksi Polieder dan yang bersistem Proyeksi UTM pada titik-titik poligon simulasi di area Selat Sunda. Hasil perhitungan distorsi sudut dan jarak tersebut digunakan sebagai dasar pemilihan sistem proyeksi yang tepat untuk pembuatan peta skala besar (> 1:5000) atau peta teknik di area studi kasus penelitian.
I.4. Manfaat Penelitian
Manfaat yang diharapkan dari penelitian ini yaitu bisa dijadikan sebagai referensi untuk pemilihan sistem proyeksi peta yang tepat untuk pembuatan peta teknik skala besar ( > 1:5000) di area penelitian Selat Sunda. Selain itu, bisa digunakan sebagai referensi ilmu pengetahuan dalam bidang survei rekayasa.
I.5. Tinjauan Pustaka
Beberapa penelitian sudah ada yang membahas tentang proyeksi peta, Penelitian yang berkaitan dengan tema tersebut misalnya yang sudah dilakukan oleh Akbari (2001), Bayuaaji (2001), dan Koswara (1997).
Akbari (2001) mengkaji tentang perubahan luas akibat dari perubahan datum geodetik dari datum Genuk ke datum ID-74 dan perubahan sistem proyeksinya yaitu dari sistem proyeksi peta Polieder ke UTM. Sampel diambil pada zone 49 UTM dengan batas garis lintang 60 40‟ LS dan 80 20‟ LS. Luasan pada peta Polieder didapat setelah melakukan transformasi koordinat dari datum Genuk ke koordinat Polieder. Luasan pada peta UTM didapat setelah melakukan transformasi datum geodetik dari datum Genuk ke ID-74 dan transformasi koordinat dari ID-74 ke koordinat UTM. Hasil penelitian menunjukkan bahwa selisih luas untuk areal yang mendekati meridian tepi zone UTM akan semakin besar dan bertanda positif yang berarti luasan pada sistem proyeksi UTM lebih besar dibandingkan luasan pada sistem proyeksi Polieder. Sementara itu selisih luasan untuk areal yang berada di tengah zone UTM mempunyai nilai negatif yang berarti luasan pada sistem proyeksi UTM lebih kecil dibandingkan dengan luasan pada sistem proyeksi Polieder.
Penelitian Bayuaji (2001) mengkaji tentang perbedaan antara luasan yang dihitung pada sistem proyeksi TM-30 hasil transformasi langsung dari koordinat
geodetik dengan luasan yang sama pada sistem proyeksi TM-30 hasil transformasi tidak langsung dari koordinat UTM. Penelitian ini dilakukan dengan mentransformasikan data persil yang bersistem proyeksi UTM ke dalam sistem koordinat geodetik dan selanjutnya ditransformasikan ke sistem proyeksi TM-30. Permasalahannya adalah luas persil hasil transformasi ini akan sama dengan luas persil dalam sistem proyeksi TM-30 (hasil transformasi langsung dari koordinat geodetik). Hasil penelitian menunjukkan bahwa tidak ada perbedaan antara luas yang dihitung pada sistem proyeksi TM-30 hasil transformasi langsung dari koordinat geodetik dengan luas yang dihitung pada sistem proyeksi TM-30 hasil transformasi tidak langsung dari koordinat UTM. Hal ini ditunjukkan dengan perbedaan luas yang bernilai 0.0000 m2 untuk setiap sampel.
Koswara (1997) meneliti tentang pengaruh reduksi jarak pada pengadaan titik dasar teknik kadastral orde empat dalam sistem proyeksi TM-30. Penelitian ini dilakukan dengan melakukan pengukuran poligon yang berlokasi di desa Sidoarum, Kecamatan Godean, Kabupaten Sleman Yogyakarta. Koordinat titik-titik poligon dihitung dengan memperhitungkan reduksi dan tanpa memperhitungkan reduksi proyeksi TM-30. Hasil penelitian menunjukkan harga koordinat yang dihasilkan dengan memperhitungkan reduksi dan tanpa memperhitungkan reduksi proyeksi TM-30 mempunyai kesalahan linier koordinat lebih kecil dari 1:6000 (memenuhi spesifikasi teknis BPN). Data hasil penelitian yang dilakukan memberikan indikasi bahwa pengabaian reduksi sudut dan jarak tidak berpengaruh terhadap harga koordinat titik-titik dasar teknik orde 4.
I.6. Landasan Teori
Dalam bab ini diuraikan teori-teori yang digunakan dalam menyelesaikan permasalahan dalam penelitian ini.
I.6.1. Elipsoid WGS84
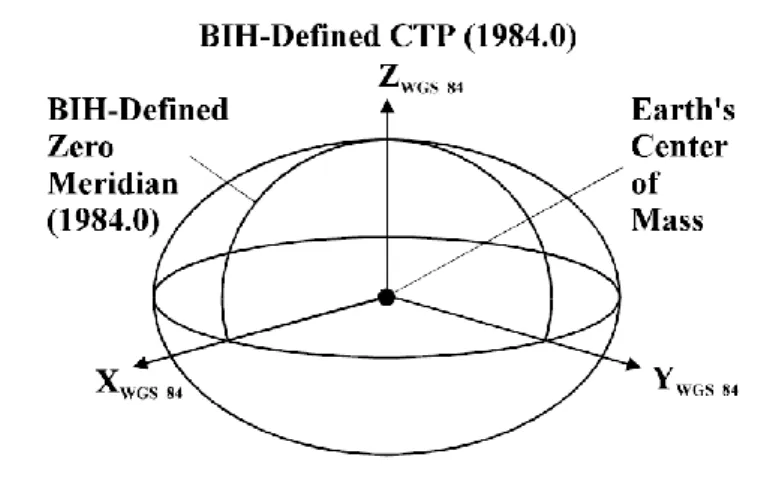
Sistem koordinat WGS84 merupakan sistem referensi terestris (CTRS)(Anam, 2005). EUROCONTROL dan IfEN (1998) menyatakan bahwa origin dan salib sumbu Sistem Koordinat WGS 84 didefinisikan sebagai berikut:
2. sumbu Z yaitu arah Conventional Terrestrial Pole (CTP) sebagai pergerakan kutub yang didefinisikan oleh BIH,
3. sumbu X yaitu perpotongan bidang meridian referensi WGS84 dengan bidang ekuator CTP (meridian referensi merupakan meridian nol yang didefinisikan oleh BIH),
4. sumbu Y melengkapi sistem koordinat tangan kanan, Earth Centred
Earth Fixed (ECEF) orthogonal, diukur pada bidang ekuator CTP dan 900
ke timur dari sumbu X.
Ilustrasi origin dan salib sumbu sistem koordinat WGS84 bisa dilihat pada gambar I.1. Parameter-parameter utama WGS84 yang menggambarkan bentuk elipsoid bumi dijelaskan pada tabel I.1.
Gambar I.1. Definisi sistem koordinat WGS 1984 (EUROCONTROL-ifEN 1998)
Tabel I.1. Parameter-parameter utama WGS84
Parameter Nama WGS84
Setengah sumbu panjang A 6378137
Penggepengan F 1/298.257223563
Kecepatan sudut rotasi bumi 7.292115 x 10-5 rad s-1 Konstanta gravitasi bumi GM 398600.5 km3 s-2
Koefisien harnonik potensial gravitasi orde 2
I.6.2. Metode Gauss Mid Latitude
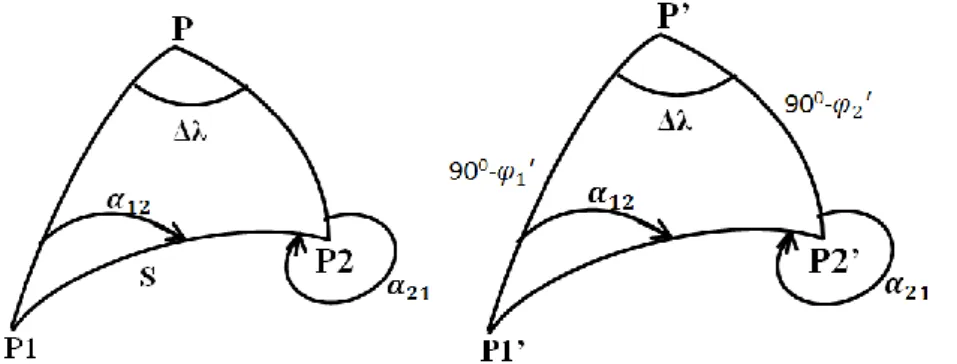
Rapp (1991) menyatakan bahwa Nilai koordinat geodetis suatu titik pada bidang elipsoid dinyatakan dalam bentuk lintang dan bujur. Misalnya, diberikan data koordinat geodetis suatu titik sebagai titik awal, data jarak dan azimut ke titik kedua. Kemudian, perlu menghitung koordinat geodetis titik kedua. Permasalahan ini didefinisikan sebagai direct geodetic problem. Selanjutnya, Inverse geodetic problem didefinisikan sebagai metode untuk menghitung azimut dari titik pertama ke titik kedua, azimut dari titik kedua ke titik petama, dan jarak kedua titik dengan data koordinat titik pertama dan kedua yang sudah diketahui. Pada penelitian ini menggunakan metode Gauss Mid Latitude untuk menghitung azimut awal dan akhir karena jarak kedua titik kurang dari 60 km. Prinsip metode Gauss Mid-Latitude yaitu mengganti segitiga polar di bidang elipsoid dengan sebuah segitiga bola dengan jari-jari kelengkungan vertikal utama rata-rata di antara titik-titiknya. Gambar segitiga elipsoid dan segitiga bola bisa dilihat pada gambar I.2. Pada gambar I.2., segitiga sebelah kiri merupakan gambar segitiga di bidang elipsoid dan segitiga sebelah kanan merupakan segitiga di bidang bola.
Gambar I.2. Penyelesaian segitiga polar dengan metode Gauss Mid-Lattitude (Rapp 1991)
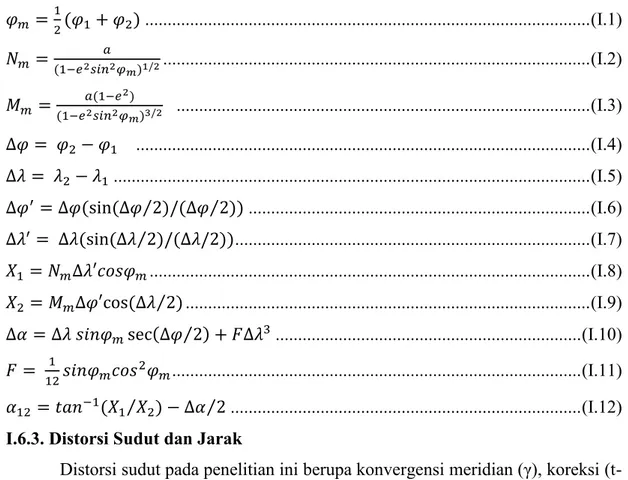
Perhitungan azimut dari titik pertama ke titik kedua (α12) di bidang elipsoid dengan metode Gauss Mid-Lattitude melalui beberapa langkah. Pertama, menghitung lintang rata-rata titik satu dan titik dua (φm) dengan asumsi bahwa lintang di bidang elipsoid sama dengan di bidang bola. Kedua, menghitung jari-jari kelengkungan vertikal utama pada lintang rata-rata (Nm), jari-jari kelengkungan meridian (Mm), beda lintang titik satu dan dua pada bidang bola (Δφ‟), beda bujur titik satu dan dua pada bidang bola (Δλ‟), dan besaran-besaran lain dengan persamaan-persamaan sebagai berikut:
... (I.1) ... (I.2) ... (I.3) ... (I.4) ... (I.5) ⁄ ⁄ ... (I.6) ⁄ ... (I.7) ... (I.8) ⁄ ... (I.9) ⁄ ... (I.10) ... (I.11) ⁄ ⁄ ... (I.12) I.6.3. Distorsi Sudut dan Jarak
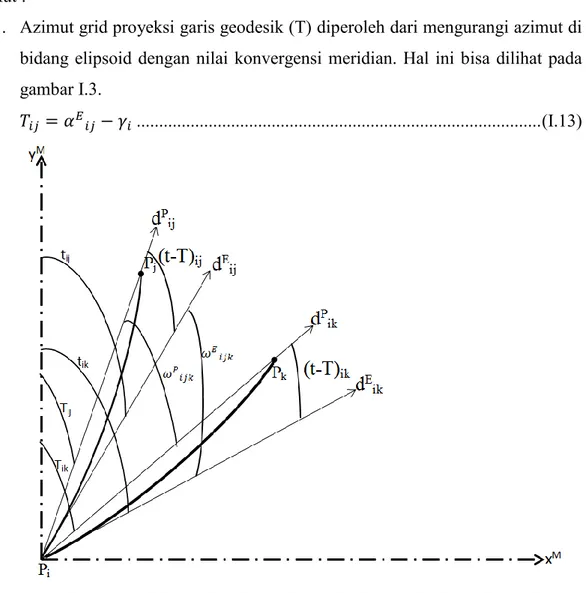
Distorsi sudut pada penelitian ini berupa konvergensi meridian (γ), koreksi (t-T) dan distorsi jarak berupa faktor skala (k). Penjelasan tentang konvergensi meridian, koreksi (t-T), dan faktor skala bisa dilihat pada gambar I.3. dan gambar I.4.
Gambar I.3. Konvergensi meridian dan koreksi (t-T) (Vanicek-Krakiwsky 1982)
Vanicek dan Krakiwsky (1982) menyatakan bahwa konvergensi meridian (γ) merupakan sudut antara garis singgung dari proyeksi garis meridian dengan y-axis pada bidang proyeksi. Penelitian ini menggunakan sistem proyeksi konform sehingga azimut di bidang elipsoid (αE) sama dengan azimut di bidang proyeksi (αM). Azimut di bidang proyeksi yaitu sudut di antara garis singgung dari proyeksi garis meridian dengan garis singgung dari proyeksi garis geodesik. Azimut grid dari proyeksi garis geodesik (T) adalah sudut di antara utara grid (yM-axis) dengan garis singgung
proyeksi garis geodesik. Azimut grid tali busur (t) yaitu sudut di antara utara grid dengan tali busur PiPj.
Ada beberapa hitungan untuk mengkoreksi distorsi sudut dan jarak sebagai berikut :
1. Azimut grid proyeksi garis geodesik (T) diperoleh dari mengurangi azimut di bidang elipsoid dengan nilai konvergensi meridian. Hal ini bisa dilihat pada gambar I.3.
... (I.13)
Gambar I.4. Reduksi sudut ukuran dan sudut jurusan horisontal (Vanicek-Krakiwsky 1982)
2. Sesuai dengan gambar I.4. terlihat bahwa untuk memperoleh nilai azimut grid tali busur ij (tij) perlu dilakukan pengurangan Tij dengan koreksi (t-T).
... (I.14) Sudut jurusan di bidang datar (dP) diperoleh dari pengurangan sudut jurusan di bidang elipsoid (dE) dengan koreksi (t-T).
... (I.15) 3. Sesuai pada gambar I.4., sudut pada bidang elipsoid perlu dikoreksi supaya
memeproleh nilai sudut pada bidang proyeksi dengan persamaan berikut ini ... (I.16) 4. Panjang proyeksi garis geodesik diperoleh dengan mengalikan panjang garis
geodesik pada bidang elipsoid dengan faktor skala (k).
... (I.17)
I.6.4. Poligon
Basuki (2006) menyatakan bahwa poligon berasal dari kata poli yang berarti banyak dan gonos yang berarti sudut. Namun arti yang sebenarnya adalah rangkaian titik-titik secara berurutan sebagai kerangka dasar pemetaan.
Poligon ada bermacam-macam dan dibedakan berdasarkan pada kriteria tertentu. Pada skripsi ini menggunakan jenis poligon terbuka terikat sempurna.
Persamaan umum penentuan koordinat suatu titik jika titik tersebut diikatkan ke titik lain yang sudah diketahui koordinatnya sebagai berikut :
... (I.18) ... (I.19) Basuki (2006) menyatakan sesuai teori kesalahan dalam pengukuran jarak dan sudut, semakin jauh dari titik ikat, kesalahan akan semakin besar. Oleh karena itu agar kesalahan tersebut tidak merambat, akhir dari poligon perlu dikontrol, baik berupa kontrol koordinat maupun kontrol jurusannya (azimutnya). Poligon yang demikian dinamakan poligon terbuka terikat sempurna.
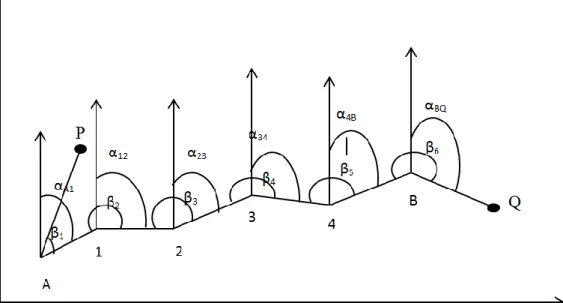
Gambar I.5. Poligon terbuka terikat sempurna
Gambar I.5. merupakan gambar poligon terbuka terikat sempurna. Sudut-sudut ukuran dipakai untuk mencari Sudut-sudut jurusan atau azimut sisi poligon, yang selanjutnya dengan data jarak digunakan untuk mencari koordinat. Maka akan dicari sudut jurusan atau azimut semua sisi poligon terlebih dahulu. Persamaan-persamaan berikut merupakan contoh untuk menghitung azimut sisi-sisi poligon:
– ... (I.20) Atau ( ) ( ) ... (I.21) Atau secara umum dapat ditulis :
... (I.22) Azimut akhir dan azimut awal dihitung dari koordinat titik-titik akhir dan titik-titik awal, pada gambar I.5. titik B,Q dan titik A,P. Azimut awal dan azimut
akhir suatu poligon terbuka terikat sempurna pada bidang elipsoid dihitung menggunakan metode Gauss’s mid latitude yang sudah dijelaskan pada subbab I.6.2. Tetapi, dalam kenyataannya pada perhitungan, ukuran sudut-sudut dihinggapi kesalahan sehingga menjadi :
... (I.23) merupakan kesalahan penutup sudut dan dikoreksikan kepada setiap sudut ukuran dengan prinsip sama rata. Untuk mendapatkan syarat sisi poligon yang harus dipenuhi, proyeksikan sisi-sisi poligon tersebut pada sumbu X(menjadi d‟) dan pada sumbu Y (menjadi d”) dan ... (I.24) dan ... (I.25) Jumlah d sin α harus sama dengan selisih absis titik akhir dan awal poligon. Demikian pula, jumlah d cos α harus sama dengan selisih ordinat titik akhir dan awal poligon. Dalam kenyataannya :
... (I.26) ... (I.27) merupakan kesalahan penutup absis dan merupakan kesalahan penutup ordinat. Kesalahan penutup jarak(linier) dinamakan :
√ ... (I.28) Kesalahan dan dikoreksikan pada setiap penambahan absis (d sin α) dan penambahan ordinat (d cos α) dengan perbandingan lurus dengan jarak-jarak sisi poligon atau jika ditulis dengan persamaan matematis sebagai berikut :
... (I.29) dan ... (I.30)
Langkah penghitungan koordinat titik-titik poligon secara sistematis adalah sebagai berikut :
1. Jumlahkan sudut-sudut hasil ukuran. Hitung dan dari koordinat 2 titik ikat akhir dan 2 titik ikat awal. Dari perhitungan azimut tersebut digunakan untuk menghitung kesalahan penutup sudut ( . Kemudian melakukan koreksi kesalahan penutup sudut ( pada masing-masing sudut hasil ukuran.
2. Menghitung azimut dari setiap sisi poligon dan dimulai dari azimut awal dengan aturan:
... (I.31) Apabila peritungannya benar maka azimut akhir akan sama dengan azimut akhir yang dihitung dari nilai koordinat 2 titik ikat di akhir.
3. Sudut azimut yang diperoleh dari langkah 2 di atas digunakan untuk menghitung d sin α dan d cos α. Kemudian melakukan perhitungan selisih antara dan serta dan . Selanjutnya, menghitung fx dan fy serta mengkoreksikan pada masing-masing d sin α dan d cos α sebanding dengan jarak-jaraknya.
I.6.5. Proyeksi Peta
Proyeksi peta adalah metode penyajian permukaan bumi pada suatu bidang datar dari koordinat geografis pada bola atau koordinat geodetis pada elipsoid. Permukaan bumi fisis tidak teratur sehingga dipilih suatu bidang yang teratur yang mendekati bidang fisis bumi yaitu bidang elipsoid. Bidang tersebut merupakan suatu bidang lengkung yang dapat digunakan sebagai bidang referensi hitungan untuk menyatakan posisi titik-titik di atas permukaan bumi dalam suatu sistem koordinat geodetis, yaitu lintang (φ) dan bujur (λ) (Prihandito, 2010).
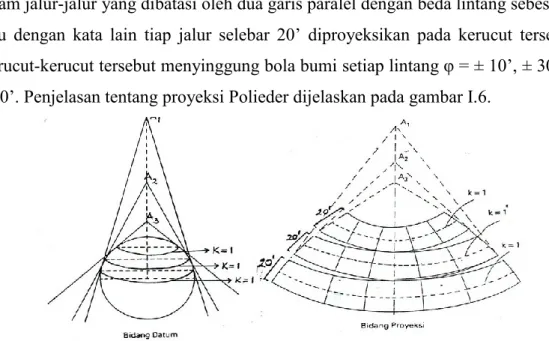
I.6.5.1. Proyeksi Polieder. Prihandito (2010) menyatakan bahwa sistem proyeksi polieder merupakan sistem proyeksi peta yang menggunakan bidang proyeksi berupa kerucut, normal, tangent, dan konform. Bidang kerucut proyeksi ini menyinggung bola bumi (tangent) pada salah satu paralel yang disebut sebagai paralel tengah atau paralel standar. Paralel tengah atau paralel standar diproyeksikan secara ekuidistan sehingga faktor skalanya (k) = 1. Luas area satu lembar bagian derajat proyeksi ini yaitu 20‟ x 20‟(sekitar 37 km x 37 km). Jadi pada proyeksi polieder, bumi dibagi
dalam jalur-jalur yang dibatasi oleh dua garis paralel dengan beda lintang sebesar 20‟ atau dengan kata lain tiap jalur selebar 20‟ diproyeksikan pada kerucut tersendiri. Kerucut-kerucut tersebut menyinggung bola bumi setiap lintang φ = ± 10‟, ± 30‟ dan ± 50‟. Penjelasan tentang proyeksi Polieder dijelaskan pada gambar I.6.
Gambar I.6. Proyeksi Polieder (Muryamto,1994)
Setiap lembar bagian derajat proyeksi polieder mempunyai sistem koordinat sendiri, dengan ketentuan sebagai berikut :
1. sumbu X : paralel tengah, 2. sumbu Y : meridian tengah,
3. titik nol : perpotongan meridian dan paralel tengah yang disebut pusat lembar bagian derajat (φ0 , λ0),
4. absis X : positif, di sebelah Timur meridian tengah, 5. absis Y : positif, di sebelah Utara paralel tengah.
I.6.5.2. Transformasi Koordinat Geodetis (φ,λ) ke Koordinat Polieder(X,Y). Muryamto (1994) menyatakan bahwa ada beberapa hal yang perlu dilakukan sebelum melakukan proses transformasi dari koordinat geodetis ke koordinat Polieder. Pertama, memperhatikan nomor LBD dan koordinat pusat lembar bagian derajat (φ0,λ0) dari titik yang akan ditransformasi. Kedua, melakukan konversi nilai λ suatu titik dari meridian Greenwich (00) ke meridian Jakarta (1060 48‟ 27.79”). Ketiga, memperhatikan letak φ dan λ titik yang akan ditransformasi (φ terletak di sebelah utara atau selatan ekuator dan λ di sebelah barat atau timur meridian Jakarta). Selanjutnya, memilih elipsoid yang dipakai karena setiap elipsoid mempunyai nilai parameter yang berbeda. Penelitian ini menggunakan elipsoid WGS84.
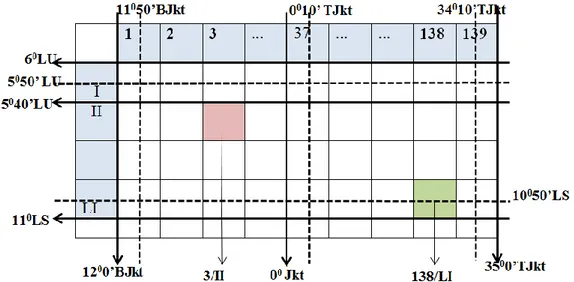
Anam (2005) menyatakan bahwa cara menentukan L0,B0 dari nomor LBD proyeksi Polieder dan sebaliknya menggunakan Tabel Polieder pada Lampiran A. Angka biasa (1, 2, dst) menunjukkan argumen atau nomor untuk menentukan koordinat bujur dari Jakarta (Bjkt = 1060 48‟ 27”.79 BT). Angka Romawi (I, III, dst) menunjukkan argumen atau nomor menentukan koordinat lintang dari ekuator. Pembagian nomor LBD peta Indonesia skala 1:100000 bisa dilihat pada gambar I.7.
Gambar I.7. Penomoran LBD peta Indonesia skala 1:100000 (Muryamto, 1994) Daerah penelitian ini terletak pada 50 50‟ 55.81” LS – 60 2‟ 38.96” LS sehingga posisi koordinat pusat lembar bagian derajat (φ0,λ0) daerah yang diteliti berada di sebelah selatan ekuator. Oleh karena itu, persamaan yang digunakan untuk mencari koordinat (X,Y) pada sistem koordinat Polieder yaitu
X = [A] Δλ – [C] Δλ Δφ ... (I.32) Y = - [B] Δφ - [D] Δλ2 - [1] [D] Δφ2 - [2] Δφ3 ... (I.33) Pada persamaan (I.32) dan (I.33) terdapat besaran-besaran yang harus dihitung nilainya, penjelasan besaran-besaran tersebut sebagai berikut:
[A] = N0 cos φ0 sin 1” ... (I.34) [B] = M0 sin 1” ... (I.35) [C] = M0 sin φ0 sin2 1” ... (I.36) [D] = ... (I.37) [1] = 3 e2 (1 – e2) ... (I.38) [2] = ( ) ... (I.39)
Δφ = (φ – φ0)” ... (I.40) Δλ = (λ – λ0)” ... (I.41) Pada besaran [A], [B], [C], [D], [1],[2] terdapat besaran , , yang harus dihitung nilainya, sebagai berikut
= ... (I.42) = ... (I.43) = ... (I.44) I.6.5.3. Transformasi Koordinat dari Satu LBD ke LBD Lain Proyeksi Polieder. Penelitian ini perlu melakukan proses transformasi koordinat dari satu LBD (φ0,λ0) ke LBD yang berdekatan (φ0‟,λ0‟) karena titik-titik poligon penelitian terletak pada tiga LBD yang berbeda. Muryamto (1994) menyatakan bahwa untuk melakukan transformasi dari satu LBD ke LBD lain dengan pusat LBD yang kedua (φ0‟,λ0‟) terletak di sebelah selatan ekuator maka menggunakan persamaan (I.45) dan (I.46) untuk menghitung transformasinya.
– ... (I.45) Y‟ = Y + Q – [α] X + [β] Y + [δ] X2 – [δ] Y2 ... (I.46) P dan Q merupakan koordinat Polieder dari pusat lembar bagian derajat pertama terhadap pusat lembar bagian derajat kedua yang dihitung dengan persamaan (I.32) dan (I.33). Pada persamaan X‟ dan Y‟ terdapat besaran-besaran yang harus dihitung sebagai berikut
[α] = Δλ sin sin 1” ... (I.47) [β] = ½ (1 - )Δ sin 1” ... (I.48) [đ] = ... (I.49) [δ] = ½ [đ] ... (I.50) Δφ = ... (I.51) Δλ = ... (I.52) I.6.5.4. Transformasi Koordinat Polieder(X,Y) ke Koordinat Geodetis (φ,λ). Muryamto(1994) menyatakan bahwa langkah-langkah melakukan transformasi koordinat Polieder ke koordinat Geodetis sebagai berikut:
1. menentukan nomor lembar bagian derajat titik yang akan ditransormasi sehingga bisa diketahui lintang dan bujur pusat lembar bagian derajat (φ0,λ0), 2. menentukan letak titik nol bagian derajat di sebelah Utara atau Selatan
ekuator,
3. menentukan elipsoid referensi yang dipakai,
4. melakukan perhitungan dengan menggunakan persamaan:
a. Jika letak titik nol bagian derajat di sebelah Utara ekuator:
Δλ = [A‟] X + [C‟] X Y ... (I.53) Δφ = [B‟] Y – [D‟] X2 ... (I.54) b. Jika letak titik nol bagian derajat di sebelah Selatan ekuator:
Δλ = [A‟] X – [C‟] X Y ... (I.55) Δφ = - [B‟] Y – [D‟] X2 ... (I.56) dalam hal ini:
... (I.57) ... (I.58) ... (I.59) ... (I.60) Nilai Δφ dan Δλ yang diperoleh dalam satuan detik dan bisa bernilai positif atau negatif sehingga untuk mencari koordinat geodetisnya:
... (I.61) ... (I.62)
I.6.5.4. Hitungan Konvergensi Meridian (γ), Koreksi (t – T), dan Faktor Skala (k) pada Proyeksi Polieder. Setiap titik yang berada di bidang elipsoid dan diproyeksikan pada bidang datar akan mengalami reduksi atau perbedaan sudut dan jarak antar titik-titik di bidang lengkung dengan di bidang datar. Distorsi sudut dan jarak tersebut berupa konvergensi meridian (γ), koreksi (t – T), dan faktor skala (k). Persamaan-persamaan untuk mencari nilai konvergensi meridian (γ), koreksi (t-T), faktor skala (k) sebagai berikut:
γ" = Δλ” sinφ0 ... (I.63) dengan Δλ = λi – λ0 ... (I.64)
(t – T)12 = (X2 – X1) (2Y1 + Y2) ... (I.65) (t – T)21 = - (X2 – X1) (Y1 + 2Y2) ... (I.66) R0 = √ ... (I.67) dihitung dengan argumen φ0
k = 1 +
... (I.68) Penggunaan persamaan (I.63) untuk menghitung konvergensi meridian (γ) karena titik yang akan dihitung nilai konvergensi meridiannya diketahui koordinat geodetisnya. Selanjutnya, perhitungan faktor skala (k) menggunakan persamaan (I.68) dikarenakan koordinat titik-titik yang akan dihitung faktor skalanya dalam sistem koordinat proyeksi peta Polieder.
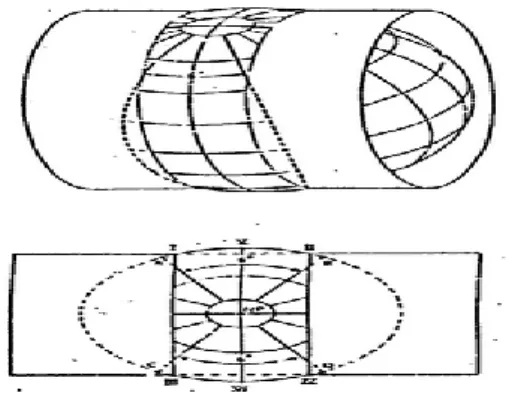
I.6.5.5. Proyeksi UTM. Proyeksi UTM merupakan proyeksi peta yang menggunakan bidang proyeksi berupa silinder, transversal dan konform. Gambar proyeksi UTM bisa dilihat pada gambar I.8. Bidang silinder proyeksi ini memotong bola bumi (secant) pada dua buah garis meridian yang dinamakan meridian standar. Pada garis meridian standar besar faktor skalanya (k) = 1. Proyeksi UTM membagi bumi menjadi beberapa zone. Setiap zone mempunyai ukuran 60 bujur x 80 lintang dan mempunyai meridian tengah sendiri dengan besar faktor skala (k0) = 0,9996. Besar faktor skala (k) bervariasi, yaitu antara meridian tengah (500.000 mT) sampai 180.000 m sebelah barat (garis grid 320.000 mT) dan timur (garis grid 680.000 mT) mempunyai harga dari 0,9996 sampai 1. Di luar batas grid 320.000 mT dan 680.000 mT mempunyai faktor skala lebih dari 1. Faktor skala pada meridian tengah adalah yang terkecil kemudian semakin membesar pada arah yang menuju ke meridian standar atau semakin menjauhi meridian tengah (Prihandito, 1989).
I.6.5.6. Transformasi Koordinat Geodetis (φ,λ) ke Koordinat UTM(X,Y). Area penelitian ini terletak pada zone 48 M yang berada pada bujur 1020-1080 BT dan berada pada lintang 00 – 80 LS. Muryamto(1994) menyatakan ada beberapa hal yang perlu diperhatikan sebelum melakukan transformasi koordinat geodetis ke koordinat UTM. Pertama, memperhatikan nilai bujur titik yang akan ditransformasikan dari meridian greenwich atau Jakarta. Untuk proyeksi UTM, nilai bujur dihitung dari Meridian Greenwich sehingga untuk Meridian Jakarta harus ditambah dengan 1060 48‟ 27”.79. Kedua, menentukan zone suatu titik berdasarkan Meridian Tengahnya(B0). Ketiga, memperhatikan letak lintang(φ) titik tersebut di sebelah utara atau selatan ekuator dan bujurnya terletak di sebelah barat atau timur Meridian Tengahnya. Selanjutnya, memperhatikan elipsoid referensi yang dipakai dan ketelitian yang yang diminta untuk menentukan banyaknya desimal dari p. Untuk melakukan transformasi koordinat suatu titik dari sistem koordinat geodetis ke sistem koordinat UTM menggunakan persamaan-persamaan sebagai berikut
X‟ = T‟ = [IV] p + [V] p3 + [B5] p5 ... (I.69) Y‟ = U‟ = [I] + [II] p2 + [III] p4 + [A6] p6 ... (I.70) Penelitian ini terletak di sebelah selatan ekuator dan sebelah timur meridian tengah sehingga untuk menghitung koordinat X dan Y menggunakan persamaan (I.71) dan (I.72)
Y = U = 10.000.000 m – U‟ ... (I.71) Selanjutnya, jika titik terletak di sebelah timur Meridian Tengah maka
X = T = 500.000 m + T‟ ... (I.72) Persamaan untuk mencari nilai X‟ dan Y‟ tersebut terdapat besaran-besaran yang harus dihitung nilainya terlebih dahulu. Persamaan-persamaan untuk menghitung nilai persamaan-persamaan tersebut sebagai berikut:
p = 0,0001 x (λi – B0) ... (I.73) [I] = k0 . m ... (I.74) [II] = k0. N. sin(φ) . cos(φ) . sin21” . 108 / 2 ... (I.75) [III] = k0. N. sin(φ). Cos3(φ). sin4 1”. 1016(5 – tg2(φ) + 9. e‟2. Cos2(φ) + 4. e‟4. Cos4(φ) ... (I.76) [IV] = k0. N. cos(φ). sin 1”. 104 ... (I.77)
[V] = k0. N. cos3(φ). sin31”. 1012. (1 – tg2(φ) + e‟2. Cos2(φ)) / 6 ...(I.78) [A6] = k0. N. sin6 1”. sin(φ). cos5(φ). (61 – 58. Tg2(φ) + tg4(φ) + 270. e‟2. cos2(φ) – 330. e‟2. sin2(φ)). 1024 / 720 ... (I.79) [B5] = k0. N. cos5(φ). sin5 1”. (5 – 18 tg2(φ) + tg4(φ) + 14.e‟2. cos2(φ) – 58. e‟2. sin2(φ)). 1020 / 120 ... (I.80) dalam hal ini
m = a(1 – e2) [ - (sin(2φi) – sin(2Φ0)) + (sin(4φi – sin(4Φ0)) - (sin(6φi) - sin(6Φ0)) + (sin(8φi) – sin(8Φ0)) - (sin(10φi) – sin(10Φ0))] ... (I.81) dengan A = ... (I.82) B = ... (I.83) C = ... (I.84) D = ... (I.85) E = ... (I.86) F = ... (I.87) I.6.5.7. Transformasi Koordinat UTM(X,Y) ke Koordinat Geodetis (φ,λ) . Persamaan untuk menghitung nilai lintang(φ) suatu titik dari koordinat UTM(X,Y) sebagai berikut: .... (I.88) ( ) ( ) ( ) ... (I.89) ... (I.90) ... (I.91) ... (I.92) ... (I.93) ... (I.94)
... (I.95) ... (I.96) ... (I.97) ... (I.98) I.6.5.8. Rumus Koreksi Konvergensi Meridian(γ) , Koreksi Horisontal(t – T), Faktor Skala(k). Setiap bidang lengkung yang diproyeksikan ke bidang datar akan mengalami distorsi baik sudut maupun jaraknya. Contohnya bidang permukaan bumi berupa elipsoid yang diproyeksikan ke bidang datar berupa silinder akan mengalami distorsi berupa konvergensi meridian (γ), koreksi (t-T) dan faktor skala(k). Persamaan yang digunakan untuk menghitung konvergensi meridian (γ), koreksi (t-T) untuk titik di belahan bumi selatan dan faktor skala(k) sebagai berikut:
γ” = [XII] p – [XIII] p3 + [C5] p5 ... (I.99) (t – T)12 = - (U2‟ – U1‟) (2T1‟ + T2‟) [XVIII] x 6,8755 . 10-8 ... (I.100) (t – T)21 = - (U1‟ – U2‟) (T1‟ + 2T2‟) [XVIII] x 6,8755 . 10-8 ... (I.101) k = k0 { 1 + [XVIII] q2 + [XIX] q4 } ... (I.102) dalam hal ini
... (I.103) ... (I.104) [XII] = sin(φ) . 104 ... (I.105) [XIII] = sin(φ). cos2(φ). sin2 1”. (1+ 3e‟2 cos2(φ) + 2e‟4 cos4(φ)). 1012/3 (I.106) [XVIII] = (1 + e‟2.cos2(φ)). 1012 / (2. k02.N2) ... (I.107) [XIX] = 1024 / (24. k04. N4) ... (I.108) [C5] = sin(φ). cos4(φ). sin4 1” (2-tg2(φ))1020/15 ... (I.109) I.6.6. Bahasa Pemrograman C++
C++ diciptakan oleh Bjarne Stroustrup, Laboratorium Bell, AT&T, pada tahun 1983. Bahasa ini bersifat kompatibel dengan bahasa pendahulunya yaitu bahasa C. Pada mulanya C++ disebut “a better C”. Nama C++ sendiri diberikan oleh Rick Mascitti pada musim paas 1983. Adapun tanda ++ berasal dari nama operator penaikan pada bahasa C(Kadir, 1995).
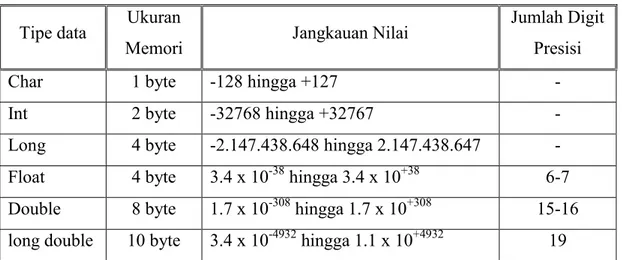
I.6.6.1. Tipe Data. Ada beberapa tipe data pada C++ antara lain: char, int, short, long, float, double, dan long double. Tipe data yang berhubungan dengan bilangan bulat adalah char, int, short, dan long. Sedangkan lainnya berhubungan dengan bilangan pecahan. Ukuran memori dari tipe data berbeda-beda. Hal ini bisa dilihat pada tabel I.2.
Tabel I.2. Tipe data pada C++ Tipe data Ukuran
Memori Jangkauan Nilai
Jumlah Digit Presisi
Char 1 byte -128 hingga +127 -
Int 2 byte -32768 hingga +32767 -
Long 4 byte -2.147.438.648 hingga 2.147.438.647 - Float 4 byte 3.4 x 10-38 hingga 3.4 x 10+38 6-7 Double 8 byte 1.7 x 10-308 hingga 1.7 x 10+308 15-16 long double 10 byte 3.4 x 10-4932 hingga 1.1 x 10+4932 19
I.6.6.2. Operator dan Ungkapan. Kadir (1995) menyatakan bahwa operator merupakan simbol yang biasa dilibatkan dalam program untuk melakukan sesuatu operasi atau manipulasi. Ungkapan (ekspresi) dalam C++ dapat berupa pengenal, konstanta, atau di antara kombinasi elemen di atas dengan operator. Proses hitungan penelitian ini menggunakan bermacam-macam operator meliputi: operator aritmatika, operator penurunan (decrement) dan penaikan (increment), operator bitwise (manipulasi bit), operator majemuk, dan operator relasi. Selain itu, proses perhitungan juga menggunakan fungsi pustaka.
Operator aritmatika ada dua jenis yaitu operator binary dan operator unary. Operator binary terdiri dari operator perkalian(*), pembagian(/), modulus(%), penjumlahan(+), dan pengurangan(-). Operator unary ada dua yaitu tanda minus(-) dan tanda plus(+). Operator perkalian(*), pembagian(/), dan modulus(%) mempunyai prioritas yang sama. Operator penjumlahan(+) dan pengurangan(-), keduanya juga mempunyai prioritas yang sama. Jika dalam satu baris terdapat lebih dari satu operator mempunyai prioritas yang sama, maka operator yang terletak di sebelah kiri dalam satu ungkapan yang diutamakan dikerjakan terlebih dahulu. Selanjutnya,
Operator perkalian(*), pembagian(/), dan modulus(%) lebih dahulu dikerjakan dari pada operator penjumlahan(+) dan pengurangan(-) karena mempunyai prioritas lebih tinggi. Prioritas pengerjaan bisa dirubah dengan menggunakan tanda kurung ( ).
Operator penurunan (++) dan penaikan (--) digunakan pada operand bertipe bilangan bulat. Operator penaikan digunakan untuk menaikkan nilai variabel sebesar satu, sedangkan operator penurunan dipakai untuk menurunkan nilai variabel sebesar satu. Penempatan operator terhadap variabel dapat dilakukan di muka atau di belakangnya.
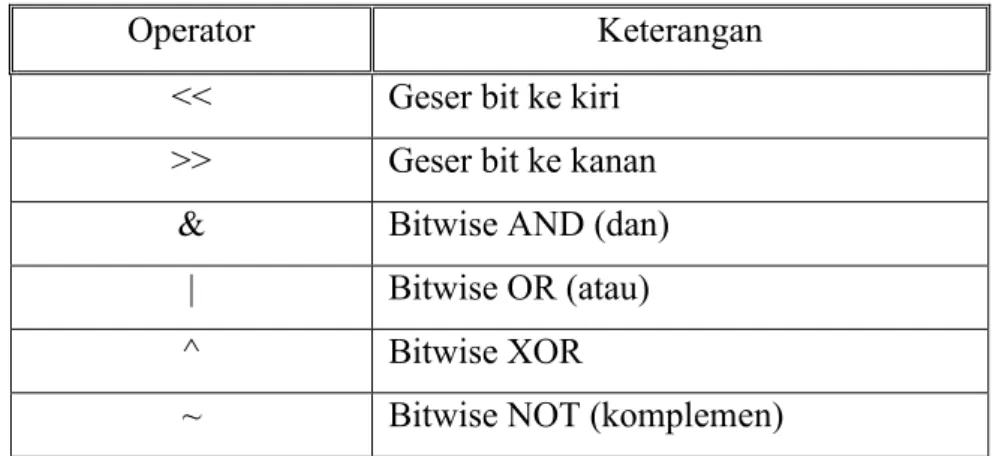
Operator bitwise digunakan untuk keperluan memanipulasi data dalam bentuk bit. Ada enam buah operator bitwise dalam C++ yang bisa dilihat pada tabel I.3.
Tabel I.3. Operator bitwise
Operator Keterangan
<< Geser bit ke kiri >> Geser bit ke kanan
& Bitwise AND (dan)
| Bitwise OR (atau)
^ Bitwise XOR
~ Bitwise NOT (komplemen)
Penggunaan Operator majemuk dimaksudkan untuk memendekkan penulisan operasi penugasan. Daftar seluruh kemungkinan operator kombinasi dalam suatu pernyataan dan pernyataan padanannya bisa dilihat pada tabel I.4.
Tabel I.4. Operator majemuk
Operator Contoh Keterangan
+= x += 2; x = x + 2; -= x -= 2; x = x – 2; *= x *= 2; x = x * 2; /= x /= 2; x = x / 2; %= x %= 2; x = x % 2; <<= x <<= 2; x = x << 2; >>= x >>= 2; x = x >> 2;
&= x &= 2; x = x & 2;
|= x |= 2; x = x | 2;
^= x ^= 2; x = x ^ 2;
Operator relasi digunakan untuk membandingkan dua buah nilai. Keseluruhan operator relasi pada C++ bisa dilihat pada tabel I.5.
Tabel I.5. Operator relasi
Operator Keterangan
= = Sama dengan (bukan penugasan)
!= Tidak sama dengan
> Lebih dari
< Kurang dari
>= Lebih dari atau sama dengan <= Kurang dari atau sama dengan
Fungsi-fungsi pustaka berfungsi untuk melaksanakan perhitugan aritmatika (akar kuadrat, eksponensial, logaritma alamiah dan sebagainya), konversi data, pemrograman grafis. Beberapa fungsi pustaka yang digunakan pada penelitian ini bisa dilihat pada tabel I.6.
Tabel I.6. Fungsi pustaka
Fungsi pustaka Kaidah File header Kegunaan
atan() double atan math.h Untuk memperoleh nilai arc
tangent dari argumen x.
cos() double cos math.h
complex.h
Untuk memperoleh nilai cosinus dari x.
pow() double pow math.h
complex.h
Untuk menghasilkan xy
sin() double sin math.h
complex.h
Untuk memperoleh sinus dari x
sqrt() double sqrt math.h complex.h
tan() double tan math.h complex.h
Untuk menghasilkan tangent dari x
I.6.6.3. Operasi Dasar Masukan dan Keluaran. Operasi dasar masukan cin digunakan untuk membaca data dari standart input atau menggunakan keyboard yang diletakkan ke sebuah variabel. Manfaat adanya fasilitas pemasukan data dari
keyboard adalah memungkinkan untuk membuat program yang bisa membaca data
yang berubah-ubah. Fasilitas cin ini memudahkan pengguna karena pengguna cukup mengkompilasi program ini sekali saja dan menjalankannya berkali-kali untuk melakukan konversi nilai yang berbeda-beda (Kadir,1995).
Pemakaian cout digunakan untuk menampilkan data atau meletakkan suatu informasi ke standart output. Pengaturan tampilan data menggunakan manipulator. Pada penelitian ini menggunakan beberapa manipulator yang bisa dilihat pada tabel I.7.
Tabel I.7. Manipulator
Manipulator Keterangan
Endl Menyisipkan newline dan mengirimkan isi penyangga keluaran ke piranti keluaran.
setw(int n) Mengatur lebar field untuk suatu nilai sebesar n karakter. setprecision(int n) Menyetel presisi bilangan pecahan sebesar n digit. setiosflags(long f) Menyetel format yang ditentukan oleh f.
Pemakaian setiosflags digunakan untuk mengontrol sejumlah tanda format seperti pada tampilan di tabel I.8.
Tabel I.8. Tanda format untuk tampilan setiosflags yang digunakan pada penelitian ini
Nama Tanda Format Keterangan
ios::left Menyetel rata kiri terhadap lebar field yang diatur melalui setw().
I.6.6.4. Pernyatan Dasar. Ada beberapa pernyataan dasar yang digunakan dalam perhitungan pada penelitian ini antara lain: pernyataan ungkapan, pernyataan deklarasi atau definisi, pernyataan majemuk, pernyataan berkondisi, pernyataan pengulangan. Pernyataan ungkapan merupakan ungkapan untuk penugasan nilai terhadap variabel atau pemanggilan fungsi dan diakhiri titik koma(;). Pernyataan deklarasi atau definisi digunakan untuk memperkenalkan nama variabel beserta tipe datanya. Pernyataan majemuk merupakan sejumalah pernyataan yang berada di kurung kurawal. Pernyataan kondisi yang digunakan yaitu pernyataan if dan pernyataan else. Pernyataan if terdiri dari kondisi dan pernyataan. Kondisi digunakan untuk menentukan pengambilan keputusan. Pernyataan dapat berupa sebuah pernyataan ataupun pernyataan majemuk. Bagian ini dijalankan hanya kalau kondisi bernilai benar. Pernyataan else selalu bersama pernyataan if atau tidak pernah berdiri sendiri. Pernyataan for merupakan salah satu pernyataan pengulangan yang disediakan pada C++. Pernyataan for berguna untuk mengulang pengeksekusian terhadap satu atau sejumlah pernyataan. Penjelasan dan contoh setiap pernyataan bisa dilihat pada tabel I.9. (Kadir,1995).
Tabel I.9. Penjelasan dan contoh dari pernyataan dasar.
Macam Pernyataan Susunan Contoh
Pernyataan Ungkapan Ungkapan; bil = 3;
Pernyataan deklarasi
atau definisi tipe_data nama_variabel; int bil; Pernyataan Majemuk { pernyataan1; pernyataan2; } { bil = 3; bil++; }
Pernyataan Berkondisi if(kondisi) pernyataan1; else
pernyataan2;
if(bil % 2)
cout << “bil ganjil” << endl; else
cout << “bil genap”<< endl; Pernyataan
Pengulangan (for)
for(ungkapan1;
ungkapan2; ungkapan3)
pernyataan;
for(abjad = „A‟; abjad <= „Z‟; abjad++)
I.6.6.5. Pengenalan Array. Array adalah kumpulan data bertipe sama yang menggunakan nama sama. Antara satu variabel dengan variabel lain di dalam array dibedakan berdasarkan subscript. Sebuah subscript berupa bilangan di dalam kurung siku. Array ada bermacam-macam, antara lain: array berdimensi satu, array berdimensi dua, dan array berdimensi banyak. Pendefinisian array terdiri dari tipe data elemen array, nama array, dan jumlah elemen array. Contoh mendefinisikan array seperti berikut:
float suhu[5];
Setelah didefinisikan, elemen array dapat diakses dengan bentuk seperti berikut: nama_array[subscript]
I.6.6.6. Fungsi. Kadir(1995) menyatakan fungsi merupakan sejumlah pernyataan yang dikemas dalam sebuah nama. Nama ini selanjutnya dapat dipanggil beberapa kali di beberapa tempat dalam program. Fungsi menerima masukan yang disebut argumen atau parameter. Masukan ini selanjutnya diproses oleh fungsi. Hasil akhir fungsi disebut nilai balik(return value).
Sebuah fungsi bisa dipanggil jika sudah dideklarasikan. Deklarasi fungsi dikenal dengan sebutan prototipe fungsi. Prototipe fungsi terdiri dari: nama fungsi, tipe nilai balik fungsi, jumlah, tipe argumen, dan diakhiri dengan titik koma(;). Kegunaan dari prototipe fungsi yaitu untuk menjamin tipe argumen yang dilewatkan pada pemanggialan fungsi benar-benar sesuai.
Sebuah fungsi juga harus didefinisikan supaya bisa dipanggil dalam program. Khusus untuk fungsi yang disediakan sistem, definisinya sudah ada dalam dalam pustaka yang akan digabungkan dengan program ketika proses linking.
Ada fungsi yang tidak perlu memiliki nilai balik. Fungsi ini digunakan untuk menampilkan suatu keterangan saja. Pada fungsi ini, tipe nilai balik fungsi yang diperlukan adalah void. Pada fungsi tanpa nilai bali, tidak ada pernyataan return. Tetapi, penggunaan return secara eksplisit juga diperbolehkan.
I.7 Hipotesis
Posisi area penelitian terhadap meridian tengah dan meridian standar pada proyeksi UTM lebih jauh daripada posisi area penelitian terhadap meridian tengah dan paralel standar proyeksi Polieder. Hal ini menyebabkan kemungkinan distorsi sudut dan jarak lebih besar pada proyeksi UTM. Akan tetapi, pada proyeksi UTM seluruh area penelitian terletak dalam satu zone sehingga tidak perlu melakukan transformasi koordinat dan tidak terjadi perambatan kesalahan. Pada proyeksi Polieder, cakupan area penelitian terletak dalam tiga LBD sehingga perlu melakukan transformasi koordinat antar LBD. Berdasarkan letak area penelitian pada sistem koordinat peta Polieder dan UTM, hipotesis penelitian yang dapat dikemukakan dalam penelitian ini adalah Proyeksi Polieder lebih tepat digunakan untuk pemetaan skala besar ( > 1:5000) di area penelitian ini daripada menggunakan proyeksi UTM. Selanjutnya, hipotesis operasional dalam penelitian ini adalah, sebagai berikut:
1. Hipotesis awal (H0) : Nilai konvergensi meridian (γ), koreksi (t-T), dan faktor skala (k) setiap titik-titik poligon simulasi pada sistem proyeksi Polieder lebih besar dari pada sistem proyeksi UTM. Oleh karena itu, pergeseran titik-titik poligon simulasi sebelum dan setelah dikoreksi dengan konvergensi meridian, koreksi (t-T), dan faktor skala (k) pada sudut dan jaraknya lebih besar pada sistem proyeksi Polieder daripada sistem proyeksi UTM.
2. Hipotesis alternatif (Ha) : Nilai konvergensi meridian (γ), koreksi (t-T), dan faktor skala (k) setiap titik-titik poligon simulasi pada sistem proyeksi Polieder lebih kecil dari pada sistem proyeksi UTM. Oleh karena itu, pergeseran titik-titik poligon simulasi sebelum dan setelah dikoreksi dengan konvergensi meridian, koreksi (t-T), dan faktor skala (k) pada sudut dan jaraknya lebih kecil pada sistem proyeksi Polieder daripada sistem proyeksi UTM.