I . PENGERTIAN DAN TUJUAN INTERPOLASI A. Pengertian
Interpolasi adalah proses pencarian dan penghitungan nilai suatu fungsi yang
grafiknya melewati sekumpulan titk yang diberikan. Titik-titik tersebut mungkin merupakan hasil eksperimen dalam sebuah percobaan, atau diperoleh dari suatu fungsi yang diketahui. B. Tujuan
Y
X (x0,y0)
(x1,y1)
Y
X (x0,y0)
(x1,y1) II. MACAM-MACAM INTERPOLASI
PEMBAHASAN A. Interpolasi Linier
Interpolasi linear atau interpolasi lanjar adalah interpolasi dua buah titik dengan sebuah garis lurus. Misal diberikan dua buah titik, (x0,y0) dan (x1,y1). Polinom yang
menginterpolasi kedua titik itu adalah persamaan garis lurus yang berbentuk: P(x)=a0+a1x
Gambar dibawah ini memperlihatkan garis lurus yang menginterpolasi titik-titik (x0,y0) dan
(x1,y1).
Gambar 1.1 Interpolasi Linier
Koefisien a0 dan a1 dicari dengan proses substitusi dan eliminasi. Dengan mensubstitusikan (x0, y0) dan (x1, y1) ke dalam persamaan p1(x)=a0+a1x diperoleh dua persamaan linear:
y0=a0+a1x0 . . . (1) y1=a0+a1x1 . . . (2)
Dari dua persamaan diatas, dengan eliminasi diperoleh:
a (¿¿0+a1x1) y0−y1=
(
a0+a1x0)
−¿y0−y1=a1x0−a1x1
x (¿¿0−x1) ⇔y0−y1=a1¿
⇔a1=y0−y1
x0−x1
Substitusikan nilai a1 ke dalam persamaan (1), diperoleh:
y0=a0+a1x0 ⇔y0=a0+
(
y0−y1 x0−x1
)
x0⇔y0=a0+x0y0−x0y1 x0−x1
⇔y0=a0+x0y0−x0y1
x0−x1 ⇔a0=y0−x0y0−x0y1
x0−x1
⇔a0=y0(x0−x1)−x0 y0+x0y1 x0−x1
⇔a0=x0y0−x1y0−x0y0+x0y1
x0−x1 ⇔a0=x0y1−x1y0
x0−x1
Dengan melakukan manipulasi aljabar untuk menentukan nilai p1(x) dapat dilakukan sebagai berikut:
Y
X P1(x0,y0)
P2 (x1,y1)
(x,y) p1(x)=x1y0−x0y1
x1−x0
+ y1– y0 x1−x0
x
p1(x)=x1y0−x0y1+xy1– x y0
x1−x0
p1(x)=
x1y0−x0y1+xy1– x y0+(x0y0−x0y0) x1−x0
p1(x)=x1y0−x0y0−x0y1+xy1– x y0+x0y0 x1−x0
x−x0 ¿ ¿ ¿– y0(x−x0) y0
(
x1−x0)
+y1¿p1(x)=¿
y x−x0
¿ ¿ ¿ (¿¿1−y0)¿ y0
(
x1−x0)
+¿p1(x)=¿
y x−x0
¿ ¿ ¿ (¿¿1−y0)¿
¿ p1(x)=y0+¿
Dalam menentukan persamaan dari interpolasi linear juga dapat dilakukan melalui cara berikut:
Gambar 1.3 Interpolasi Linier
Persamaan garis lurus yang melalui 2 titik P1 (x0,y0) dan P2 (x1,y1) dapat dituliskan dengan:
y−y0 y1−y0
= x−x0 x1−x0
Sehingga diperoleh persamaan dari interpolasi linear sebagai berikut:
y=y1−y0
x1−x0
(
x−x0)
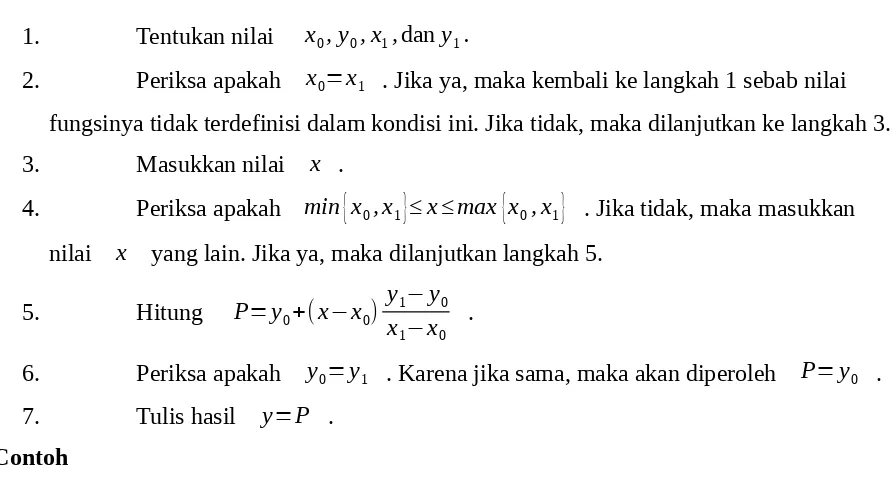
+y0Algoritma Interpolasi Linear
1. Tentukan nilai x0, y0, x1,dany1.
2. Periksa apakah x0=x1 . Jika ya, maka kembali ke langkah 1 sebab nilai fungsinya tidak terdefinisi dalam kondisi ini. Jika tidak, maka dilanjutkan ke langkah 3. 3. Masukkan nilai x .
4. Periksa apakah min
{
x0, x1}
≤ x ≤ max{
x0, x1}
. Jika tidak, maka masukkan nilai x yang lain. Jika ya, maka dilanjutkan langkah 5.5. Hitung P=y0+(x−x0)
y1−y0 x1−x0
.
6. Periksa apakah y0=y1 . Karena jika sama, maka akan diperoleh P=y0 . 7. Tulis hasil y=P .
Contoh
1. Perkirakan atau prediksi jumlah penduduk Purworejo pada tahun 2005 berdasarkan data tabulasi berikut:
Tahun 1990 2000
Penyelesaian:
Dipunyai: x0 = 1990, x1 = 2000, y0 = 187.900, y1 = 205.700.
Ditanya: Prediksi jumlah penduduk Gunungpati pada tahun 1995. Ingat :
y x−x0
¿ ¿ ¿ (¿¿1−y0)¿
¿ p1(x)=y0+¿
Misalkan x=1995 1995−1990
¿ ¿ ¿
(205.700−187.900)¿ p1(2005)=187.900+¿
p1(2005)=196.800
Jadi, diperkirakan jumlah penduduk Purworejo pada tahun 1995 adalah 196.800 orang.
2. Dari data ln(9.0) = 2.1972, ln(9.5) = 2.2513, tentukan ln(9.2) dengan interpolasi linier sampai 4 desimal. Bandingkan hasil yang diperoleh dengan nilai sejati ln(9.2)=2.2192.
Penyelesaian: Dipunyai:
x0=9.0,y0=2.1972 . x1=9.5,y1=2.2513.
Ditanya : tentukan nilai ln(9.2) sampai 5 angka bena kemudian dibandingkan dengan nilai sejati ln(9.2) = 2.2192.
Ingat: y x−x0
¿ ¿ ¿ (¿¿1−y0)¿
Y
X x0,y0
x1,y1
x2,y2
x2 x1
x0 y0
y1
y2
Y
X x0,y0
x1,y1
x2,y2
x2 x1
x0 y0
y1
y2 9.2−9.0
¿ ¿ ¿
(2.2513−2.1972)¿ p1(9.2)=2.1972+¿
p1(9.2)=2.21884
Galat = nilai sejati ln(9.2) – nilai ln(9.2) hasil perhitungan dengan metode interpolasi linear
Galat = 2.2192 – 2.21884 = 3,6 x 10-4 .
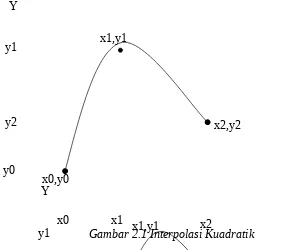
B. Interpolasi Kuadratik
Misal diberi tiga buah titik data,
(
x0, y0)
,(
x1, y1)
, dan(x2, y2) . Polinom yang menginterpolasi ketiga buah titik itu adalah polinom kuadrat yang berbentuk:p2(x)=a0+a1x+a2x 2
Bila digambar, kurva polinom kuadrat berbentu parabola, seperti ditunjukkan dalam Gambar 2.4 dan Gambar 2.5
Gambar 2.1 Interpolasi Kuadratik
Masih terdapat grafik berbentuk parabola yang lain, selain yang ditunjukkan pada
Gambar 2.1 Bukan Interpolasai Kuadratik
Menyelesaikan Polinom p2(x) ditentukan dengan cara berikut:
1. Substitusikan (xi, yi) ke dalam persamaan p2(x)=a0+a1xi+a2xi
2
dengan i = 0,
1, 2. Diperoleh tiga persamaan dengan tiga buah parameter yang tidak diketahui
yaitu: a0, a1, dan a2: a0+a1x0+a2x02=y0
a0+a1x1+a2x12=y1 a0+a1x2+a2x22=y2
2. Hitung a0, a1, dan a2 dari sistem persamaan tersebut dengan metode eliminasi Gauss.
Selain menggunakan metode eliminasi Gauss, menentukan a0, a1, dan a2 dapat ditentukan dengan cara sebagai berikut:
a) Hitung F01=yi+1−yi
xi+1−xi
, F12=yi+2−yi+1
yi+2−yi+1
, dan F012=F12−F01
xi+2−xi
b) Hitung P=y1+
(
x−xi)
F01+(x−xi)(x−xi+1)F012Algoritma Interpolasi Kuadratik
2. Periksa apakah x0<x1<x2 . Jika tidak, maka kembali ke langkah 1 sebab nilai fungsinya tidak terdefinisi dalam kondisi ini. Jika tidak, maka dilanjutkan ke langkah 3.
3. Masukkan nilai x .
4. Periksa apakah min
{
x0, x1, x2}
≤ x ≤max{
x0, x1, x2}
. Jika tidak, maka masukkan nilai x yang lain. Jika ya, maka dilanjutkan langkah 5.5. Hitung F01=y1−y0 x1−x0
, F12=y2−y1 x2−x1
,danF012=F12−F01 x2−x0 6. Hitung P=y1+
(
x−xi)
F01+(
x−xi)
(x−xi)F0127. Periksa apakah F012=0. Jika ya, maka persamaan yang dihasilkan linear. Jika tidak maka persamaan yang dihasilkan merupakan persamaan kuadrat.
8. Tulis hasil y=P . Contoh :
1. Diberikan titik ln(8.0) = 2.0794, ln(9.0) = 2.1972, dan ln(9.5) = 2.2513. Tentukan nilai ln(9.2) dengan interpolasi kuadratik.
Penyelesaian:
Diketahui: x0=8.0,y0=2.0794 x1=9.0,y1=2.1972 x2=9.5,y2=2.2513 Ditanya : Tentukan nilai ln (9.2).
Sistem persamaan yang terbentuk adalah:
a0+8.0a1+64.00a2=2.0794
a0+9.0a1+81.00a2=2.1972 a0+9.5a1+90.25a2=2.2513
Untuk perhitungan secara manual, sistem persamaan diselesaikan dengan metode eliminasi Gauss dengan langkah sebagai berikut:
Matriks yang terbentuk dari persamaan
a0+8.0a1+64.00a2=2.0794 a0+9.0a1+81.00a2=2.1972
adalah:
[
1 1 1 8 9 9.5 64 81 90.25 2.0794 2.1972 2.2513]
R21(−1) R31(−1)
[
1 0 0 8 1 1.5 64 17 26.25 2.0794 0.1178 0.1719
]
R12(−8)
R32(−1.5)
[
1 0 0 0 1 0 −72 17 0.75 1.137 0.1178
−0.0048
]
R31( 1
0.75)
[
1 0 0 0 1 0 −72 17 1 1.137 0.1178−0.0064
]
R13(72) R23(−17)
[
1 0 0 0 1 0 0 0 1 0.6762 0.2266 −0.0064
]
Menggunakan metode Eliminasi gauss menghasilkan
a0=0.6762,a1=0.2266,a2=−0.0064 .
Polinom kuadratnya adalah: p2(x)=a0+a1x+a2x2
p2(9.2)=0.6762+0.2266.(9.2)+−0.0064.(9.2) 2
p2(9.2)=2.2192
2. Dalam suatu eksperimen fisika pergerakan sebuah benda pedat berbentuk parabola. Dengan data sebagai berikut :
t (detik) Y (m)
5 2,01
6,5 2,443
8 2,897
Dengan menggunakan interpolasi kuadratik perkirakan ketinggian bola pada saat t=7 detik.
Penyelesaian:
Dipunyai data pergerakan suatu benda padat:
t (detik) Y (m)
5 2,01
6,5 2,443
Dengan menggunakan interpolasi kuadratik akan diprediksi ketinggian bola saat t=7 detik.
Sistem persamaan lanjar yang terbentuk adalah:
a0+5,0a1+25,00a2=2,01
a0+6,5a1+42,25a2=2,443 a0+8,0a1+64,00a2=2,897
Penyelesaian sistem persamaan dengan menggunakan metode eliminasi Gauss
¿
[
1 5 251 6,5 42,25 1 8 64
2,01 2,443 2,897
]
R2,R1(−1) R3,R1(−1)
[
1 5 25 0 1,5 17,25 0 3 39
2,01 0,443 0,887
]
R2
(
1 1,5)
¿[
1 5 250 1 11,5 0 3 39
2,01 0,28867
0,887
]
R1,R2(−5) R3,R2(−3)
[
1 0 −32,5 0 1 11,5
1 0 4,5
0,56667 0,28867 0,021
]
¿R3
(
1 4,5)
[
1 0 −32,50 1 11,5 1 0 1
0,56667 0,28867 0,00467
]
R1,R3(32,5)
R2,R3(11,5)
[
1 0 0 0 1 0 1 0 1
0,71733 0,235 0,00467
]
Diperoleh : a0=0,71733,a1=0,235,a2=0,00467
Sehingga Polinom Kuadratnya adalah:
p2(x)=0,71733+0,235x+0,00467x2 Sehingga p2(7) = 2,588
Jadi,diprediksi, pada t = 7 detik tinggi bola 2,588 m.
Definisi : Suatu fungsi f (x) dinamakan suatu spline berderajat k jika 1. Domain dari S adalah suatu interval [a; b].
2. S; S0; :::; S(k�1) kontinu pada [a; b].
3. Terdapat titik-titik xi sedemikian sehingga a = x0 < x1 < ::: < xn = b dan juga S adalah suatu polinomial berderajat k pada setiap [xi; xi+1].
Dengan kata lain, spline adalah potongan-potongan fungsi polinomial dengan turunan-turunan memenuhi kendala-kendala kekontinuan tertentu. Ketika k=1, spline
dina-makan spline linear. Ketika k=2 , spline dinamakan spline kuadratik. Ketika k=3, spline dinamakan spline kubik.
C.1 Spline Linear
akan dicari suatu fungsi spline linear S(x) sedemikian sehingga S
(
xi)
=(yi)untuk 0≤i ≤ n . Diambil
Sx=
{
S0(x); xϵ[x1, x2] S1(x); xϵ
[
x1, x2]⋮ ⋮
Sn−1(x); xϵ[xn−1, xn]
Dengan setiap Si(x) adalah linier
Diperhatikan fungsi linear Si(x) . Garis ini melalui titik (xi, yi) dan (xi+1, yi+1) , se-hingga kemiringan dari Si(x) yaitu
mi=yi+1−yi xi+1−xi
Kita dapat juga mengatakan bahwa garis tersebut melalui titik (xi, yi) dan x ,(S(x))
¿ untuk sembarang x∈[xi, x+1i] , sehingga
mi=Si(x)−yi x−xi
yang memberikan
Si(x)=yi+mi
(
x−xi)
¿yi+ yi+1−yixi+1−xi
(
x−xi
)
(C.1 .1)Contoh C.2
Buatlah interpolasi spline linier untuk data berikut:
y 1,3 4,5 2,0 2,1 5,0 3,0
Penyelesaian :
[
0,0;0,1]S0(x)=1,3+4,5−1,30,1−0 (x−0)=1,3+32x
[
0,1;0,4]S1(x)=4,5+2,0−4,5
0,4−0,1(x−0,1)= 16
3 − 25
3 x
[
0,4;0,5]
S2(x)=2+2,1−2,00,5−0,4(x−0,4)=1,6+x
[
0,5;0,75]S3(x)=2,1+ 5,0−2,10,75−0,5(x−0,5)=−3,7−11,6x
[
0,75;1]
S4(x)=5+ 3−51−0,75(x−0,75)=11−8x
Jadi spline adalah potongan linear, yaitu linear di antara setiap titik data. Persamaan (C.1.1) dapat dituliskan kembali sebagai
Si(x)=aix+bi,i=0,1,… , n−1 dengan
ai=yi+1−yi xi+1−xi
dan bi=yi−aixi
kekurangan utama spline linear adalah pada titik-titik data di mana dua spline bertemu, kemiringannya berubah secara mendadak. Secara formal ini berarti bahwa turunan pertama dari fungsi tidak kontinyu pada titik-titik tersebut. Kelemahan ini diatasi oleh penggunaan polinomial spline orde yang lebih tinggi.
C.2 Spline Kuadratik
Tidak seperti spline linear, spline kuadratik tidak dide.nisikan sepenuhnya oleh nilai-nilai di xi . Berikut ini kita perhatikan alasannya. Spline kuadratik didefnisikan oleh
Si(x)=aix2+bix+ci
Jadi terdapat 3n parameter untuk mende.nisikan S(x) . Diperhatikan titik-titik data:
x0 x1 x2 ⋯ xn
yy y1 y2 ⋯ yn
Syarat-syarat untuk menentukan 3n parameter dijelaskan seperti berikut ini.
Si
(
xi)
=yidan Si(
xi+1)
=yi+1jadi, disini didapatkan 2n persamaan
2. Syarat pada kontinuitas dari S'(x) memberikan suatu persamaan tunggal untuk setiap titik dalam xi, i=0,1,2,… , n−1 yaitu:
S'
i−1
(
xi)
=S'i(xi)Jadi dari sini dipunyai n−1 persamaan. Sekarang totalnya terdapat 3n−1 persamaan, tetapi karena terdapat 3n parameter yang tidak diketahui maka sistem mempunyai kekurangan ketentuan.
3. Pilihan-pilihan yang mungkin untuk melengkapi kekurangan ketentuan yaitu S'
(
x0)
=0atau S( {x} rsub {0} )=Sekarang dimisalkan zi=S '
i
(
xi)
. karena Si(
xi)
=yi , S'i(
xi)
=zi , danS'
i
(
xi+1)
=zi+1 , maka kita dapat mendefinisikan : Si(x)= zi+1−zi2
(
xi+1−xi)
(
x−xi)
2+zi(
x−xi)
+yiC.2 .1Selanjutnya, dengan pengambilan x=xi+1 diperoleh yi+1=Si(x)= zi+1−zi
2
(
xi+1−xi)
(
x−xi)
2+zi(
x−xi)
+yi yi+1−yi=zi+1−zi2
(
x−xi)
+zi(
x−xi)
yi+1−yi=zi+1−zi
2
(
x−xi)
Jadi, kita dapat menentukan zi+1dari zi : zi+1=2 yi+1−yi
xi+1−xi
−zi
Contoh C.2
Buatlah interpolasi spline kuadratik untuk data berikut ini
x 0,0 0,1 0,4 0,5
y 1,3 4,5 2,0 2,1
dengan ketetapan zo=0
Penyelesaian :
pertama-tama hitung nilai zi z1=2 y1−y0
x1−x0
−z0=24,5−1,3
0,1−0 −0=64 z2=2
y2−y1 x2−x1
−z1=2 2−4,5
0,4−0,1−64=
−242
3
z3=2 y3−y2 x3−x2
−z2=2 2,1−2
0,5−0,4+ 242
3 = 248
S0(x)= z1−z0 2
(
x1−x0)
(
x−x0)
2+z0(
x−x0)
+y0 ¿320x2+1.3untuk0≤ x ≤0,1
S1(x)= z2−z1 2
(
x2−x1)
(
x−x1)
2+z1(
x−x1)
+y1 ¿−21709 (x−0,1) 2
+64(x−0,1)+4,5
¿−2170 9 x
2
+1010 9 x+
194
45 , untuk0,1≤ x ≤0,4
S2(x)= z3−z2 2
(
x3−x2)
(
x−x2)
2+z2(
x−x2)
+y2 ¿24503 (x−0,4) 2
−242
3 (x−0,4)+2
¿2450 3 x
2
−2202 3 x+
4948
30 ,untuk0,4≤ x ≤0,5 persamaan C.2.1 dapat ditulis kembali sebagai
Si(x)=aix
2
+bix+ci,i=0,1,2,… , n−1
dengan
ai= zi+1−zi 2
(
xi+1−xi)
,bi=zi−2aixi, ci=aixi2−zixi+yi
C.3 Spline Kubik
Diketahui suatu fungsi f(x) yang dibatasi oleh interval a dan b, dan memiliki sejumlah titik data a=x0<x1<…<xn=b . Interpolasi spline kubik S(x) adalah
suatu potongan fungsi polinomial berderajat tiga (kubik) yang menghubungkan dua titik yang bersebelahan, dengan ketentuan, untuk i=0,1,2,… , n−1
(S0) Potongan fungsi pada subinterval
[
xi, xi+1]
,i=0,1,2,… , n−1 Si(x)=ai(
x−xi)
3+bi
(
x−xi)
2+ci
(
x−xi)
+di (S1) Pada setiap titik data x=xi ,i=0,1,…, nS
(
xi)
=f(xi)(S2) Nilai-nilai fungsi harus sama pada titik-titik dalam: Si
(
xi+1)
=Si+1(
xi+1)
, i=0,1,2,… , n−2(S3) Turunan-turunan pertama pada titik dalam harus sama: S 'i
(
xi+1)
=S 'i+1(
xi+1)
, i=0,1,2,… , n−2(S4) Turunan-turunan kedua pada titik dalam harus sama:
S} rsub {i} left ({x} rsub {i+1} right ) = {Si+1
(
xi+1)
, i=0,1,2,… , n−2(S5) Salah satu syarat batas di antara dua syarat batas x0 dan xn berikut ini harus dipenuhi:
S(x0)=S left ({x} rsub {n} right ) = (disebut batas alamiah/ natural boundary) S'
(
x0)
=f'
(x0) dan S
'
(
xn)
=f '(xn) (disebut batas apitan/ clamped boundary)
di=yi, ci=di+1−di
hi
−hi
3
(
2bi+bi)
, ai=1 3hi
(
bi+1−bi)
C.3.1Buatlah interpolasi spline kubik untuk data berikut ini
x 0 1 2 3
y 0 1 4 5
terhadap syarat batas : S'
(
x0)
=S'(0)=c0=2dan S'(
xn)
=S'(3)=cn=2Penyelesaian:
Lebar subinterval pada sumbu x: h1=h2=h3=h4=1
dan beda terbagi pertama, dengan mengingat bahwa di=f
(
xi)
=yi , yaitu :d1−d0 h0
=1,d2−d1
h1
=3,d3−d2
h2
=1
Persamaan matriks dapat dituliskan sebagai
[
2 11 4 0 0 1 0 0 1 0 0 4 1 1 2
]
[
b0 b1 b2 b3
]
=3
[
1 3 1 −2 −1 −3 2 −1]
[
−3 6 −6
3
]
yang mempunyai penyelesaianb0=−3,b1=6,b2=−6,b3=−3
Disubstitusikan penyelesaian tersebut ke persamaan C.3.1 untuk memperoleh koefisien-koefisien lain dari spline kubik:
d0=0,d1=1,d2=4 c0=1−
1
3
(
3+2(−3))
=2,c1=3− 13
(
−3+2(3))
=2,c2=3− 13
(
−3+2(3))
=2, a0=3−(−3)3 =2,a1= −3−3
3 =−2,a2=
3−(−3)
3 =2
Terakhir, kita dapat menuliskan persamaan spline kubik seperti:
S0=2x 3
+3x2+2x , untuk x∈
[
0,1]
x−1 ¿ ¿ S1=−2(x−1)
3 +3¿
x−2 ¿ ¿ S2=2(x−2)
3 +3¿
D. Interpolasi Newton
Persamaan Polinom Linier
p1(x)=y0+
(
y1−y0)
(
x1−x0)
(x−x0) Bentuk pers ini dapat ditulis : Yang dalam hal ini a0=y0=f
(
x0)
D.1.1x1 ¿ x0 −f(¿)
f¿ a1=
(
y1−y0)
(
x1−x0)
=¿ Persamaan ini merupakan bentuk selish terbagi (divided-difference) a1=f[x1, x0]
Polinom kuadratik
p2(x)=a0+a1
(
x−x0)
+a2(
x−x0) (
x−x1)
ataup2(x)=p1(x)+a2
(
x−x0) (
x−x1)
Dari persamaan ini menunjukkan bahwa p2(x) dapat dibentuk dari persamaan sebelumnya p1(x) . Nilai a2 dapat ditemukan dengan mengganti x=x2 untuk mendapatkan a2=f
(
x2)
−a0−a1(
x2−x0)
(
x2−x0) (
x2−x1)
D.1.3jika nilai a0 dan a1 pada persamaan D.1.1 dan D.1.2 dimasukkan ke persamaan D.1.3 maka akan didapatkan:
x2 ¿ x0 −f(¿)
¿ x1 ¿ x0 −f(¿)
¿ f¿
¿ a2=¿
jadi, tahapan pembentukan polinom newton: p1(x)=p0(x)+a1(x−x0)
p1(x)=a0+a1
(
x−x0)
p2(x)=p1(x)+a2
(
x−x0) (
x−x1)
p3(x)=p2(x)+a3
(
x−x0) (
x−x1)(
x−x2)
Nilai konstanta a0, a1, … , an , merupakan nilai selisih terbagi , dengan nilai a0=f
(
x0)
a1=f[x1, x0] ⋮=⋮ an=f[xn, xn−1, … , x1, x0]xi ¿ xj
−f(¿) f¿ f
[
xi, xj]
=¿f
[
xi, xj ,xk]
=f
[
xi, xj]
−f[
xj, xk]
xi−xkf
[
xn, xn−1, … , x1, x0]=f[
xn, xn−1, … , x1, x0]−f[xn−1, xn−2, … , x1, x0] xn−x0Karena a0, a1, … , an , merupakan nilai selisih terbagi, maka polinom Newton dinamakan polinom interpolasi selisih terbagi Newton. Nilai selisih terbagi dapat dihitung dengan menggunakan tabel yng disebut tabel selisih terbagi.
Dengan demikian polinom Newton dapat ditulis dalam hub rekursif sebagai : Rekurens
pn(x)=pn−1(x)+
(
x−x0) (
x−x1)
…(
x−xn−1)
f[
xn−1, xn−2, … , x1, x0]
Basis
p0(x)=f
(
x0)
Contoh :Bentuklah polinom Newton derajat satu, dua, tiga dan empat yang menghampiri f(x)=cosx dalam range [0.0, 4] dan jarak antar titik adalah 1.0. Lalu taksirlah f(x) dengan x=2.5 dengan Polinom Newton derajat 3
xi yi ST-1 ST-2 ST-3 ST-4
0 1 -0.4597 -0.2484 0.1466 -0.147
1 0.5403 -0.9654 0.1913 0.088
2 -0.4161 -0.5739 0.4551
3 -0.99 0.3363
4 -0.6536
E. Interpolasi Kubik
Misal diberikan empat buah titik data , x0,y0
¿ )(, x1 , y1 ), x2
¿ , y2 ), dan ( x3 , y3 ).Polinom yang mengiterpolasi keempat buah titik itu ialah polinom kubik yang berbentuk :
p3(x) = a0 + a1 x+ a2x2 + a3x3 Polinom p3(x) ditentukan dengan cara berikut:
1.Sulihkan ( xi , yi ) kedalam persamaan (p.5.9), i=0,1,2,3. Sehingga diperoleh empat buah persamaan dengan empat buah parameter yang tidak diketahui yaitu a0,a1, a2dan a3:
a0+a1xo+a2x02+a3x03=y0 a0+a1x1a2x12+a3x13=y1 a0+a1x2+a2x22+a3x23=y2 a0+a1x3+a2x3
2 +a3x3
3 =y3
Jarak yang dibutuhkan sebuah kendaraan untuk berhenti adalah fungsi kecepatan. data percobaan berikut ini menunjukkan hubungan antara kecepatan dan jarak yang
dibutuhkan untuk menghentikan kecepatan.
Perkiraan jarak henti yang dibutuhkan bagi sebuah kendaraan yang melaju dengan