BAB 2
LANDASAN TEORI
2.1 Metode Kuadrat Terkecil
Persamaan regresi linier yang biasa didefinisikan dengan menggunakan metode
pendugaan parameter Ordinary Least Square (OLS), secara umum dapat dituliskan :
Y = β0 + β1X1+…βpXp +μ (2.1)
Dimana
Y : variabel dependen
β1 X
: koefisien regresi
1
μ : nilai eror regresi
: variabel independen
Vektor galat μ diasumsikan menyebar N (0, σ2 I)
Jika dilakukan pengamatan sebanyak n, maka model persamaan regresi linier
berganda ke-I adalah
Yi= β0 + β1Xi1 +…βpXip p = 1, 2, …, n
+μ (2.2)
i =1,2,…,p
Persamaan estimasi regresi linier berganda adalah
��= �̂0+�̂1��1 +⋯+�̂���� (2.3)
Secara matriks, bentuk penaksir kuadrat terkecil (least square) dari parameter tersebut adalah :
Dengan
��: vektor dari parameter yang ditaksir (p+1) x 1 X : matriks variabel independen berukuran n x (p+1)
Y : vektor observasi dari variabel dependen berukuran (n x 1)
Uji signifikansi parsial yaitu uji untuk mengetahui variabel mana saja yang
mempengaruhi variabel dependen secara signifikan. Hipotesis yang digunakan
adalah
H0: βk H
= 0
1: βk
Dengan taraf signifikansi adalah α = 5% ≠ 0 dengan k = 1, 2, 3, …p
Dengan statistik uji yang digunakan adalah
�ℎ�� =����������~��−2−� (2.5)
Dengan keputusan tolak H0 jika |thit| > t(df, 1-α/2)
df : n-2-k
. Variabel yang tidak berpengaruh
secara signifikan dapat dihilangkan dalam model. Di mana
n : jumlah pengamatan
k : jumlah variabel bebas
2.2 Regresi Spasial
Regresi spasial adalah metode untuk memodelkan suatu data yang memiliki unsur
spasial. Model umum regresi spasial atau juga biasa disebut Spatial Autoregressive Moving Average (SARMA) dalam bentuk matriks (Le Sage 1999; Anselin 2004) dapat disajikan sebagai berikut :
�= ρ�� + �� + � (2.6)
�= �+ � (2.7)
Dengan
y : vektor variabel dependen berukuran n x 1
X : matriks variabel independen dengan ukuran n x (k+1)
� : vektor koefisien parameter regresi dengan ukuran (k+1) x 1
ρ : parameter koefisien spasial lag variabel dependen
λ : parameter koefisien spasial lag pada error u, � : vektor error dengan ukuran n x1
W : matriks pembobot dengan ukuran n x n
n : jumlah amatan atau lokasi (i = 1, 2, 3, …,,n)
I : matriks identitas dengan ukuran n x n
Pada persamaan (2.6) dapat dinyatakan dalam bentuk
� -ρ�� = �� + � (2.8)
(I-ρ�)� = �� + �
Sedangkan pada persamaan (2.7) dapat dinyatakan dalam bentuk
(I-λW)� = � atau
� =(I-λW)-1
Persamaan (2.8) dan (2.9) disubtitusi ke persamaan (2.6), maka akan diperoleh
bentuk persamaan yang lain yaitu :
� (2.9)
(I-ρ�)� = �� +(I-λW)-1� (2.10)
Pendugaan parameter pada model umum persamaan regresi spasial dalam bentuk
matriks (Anselin, 1988) yaitu :
2.3 Spatial Autoregressive Model (SAR)
Jika nilai ρ≠0 dan λ=0 maka model regresi spasial akan menjadi model regresi
spasial Mixed Regressive-Autoregressiv atau Spatial Autoregressive Model (SAR) atau disebut juga Spatial lag Model (SLM) (Anselin, 1988) dengan bentuk
persamaannya yaitu :
�= ρ�� +��+ � (2.12)
�~ N( 0, σ2 I)
Model persamaan (2.12) mengasumsikan bahwa proses autoregressive hanya pada
variabel dependen. Pada persamaan tersebut, respon variabel y dimodelkan
sebagai kombinasi linier dari daerah sekitarnya atau daerah yang berimpitan
dengan y, tanpa adanya eksplanatori variabel yang lain. Bentuk penaksir dari
metode SAR adalah
�̂= (���)−1 ��(� − ��)� (2.13)
Dan penduga untuk ρ adalah
��= (������)−1 �����
2.4 Spatial Error Model (SEM)
Jika ρ=0 d an λ≠0 , maka persamaan (2.6) menjadi model Spatial Error Model
(SEM) dengan bentuk persamaannya yaitu
�=�� + , �= �+ � (2.14)
� ~ N (0, σ2I)
Model galat spasial adalah model regresi linier yang pada peubah galatnya
β�=��X− λ�WX�T�X− λ�WX��− 1
�X− λ�WX�T�y− λ�Wy� (2.15)
Untuk penduga parameter λ diperlukan suatu iterasi numerik untuk mendapatkan
penduga untuk λ yang memaksimalkan log kemungkinan tersebut.
2.5 Signifikansi Parameter Regresi Spasial
Anselin (2003) menyatakan bahwa salah satu prinsip dasar penduga Maksimum
Likelihood adalah asymptotic, artinya semakin besar ukuran n maka kurva akan
semakin mendekati kurva sebaran normal. Pengujian signifikansi parameter
regresi (β) dan autoregresif (ρ dan λ) secara parsial yaitu didasarkan pada nilai
ragam galat (σ2
Dimana β
), sehingga statistik uji signifikansi parameter yang dipergunakan
yaitu
�ℎ����� = �.���
(�)
(θ)
H
merupakan asymptotic standard error. Melalui uji parsial
masing-masing parameter θ dengan hipotesis
0 H
: θ = 0
1
Dimana θ merupakan parameter regresi spasial (yaitu β, λ, dan ρ), apabila Z : θ ≠ 0
hitung ≥ Z(α/2) atau ρ = value < α/2, maka keputusan tolak H0, artinya koefisien regresi layak digunakan pada model.
2.6 Efek Spasial
2.6.1 Efek Heteroskedastisitas (Spatial Heterogenity)
Efek heterogenitas adalah efek yang menunjukan adanya keragaman antar lokasi.
Jadi, setiap lokasi mempunyai struktur dan parameter hubungan yang berbeda.
Pengujian efek spasial dilakukan dengan uji heterogenitas yaitu menggunakan uji
Breusch-Pagan test (BP test)
Keragaman spasial menggunakan uji Breusch-Pagan (Anselin, 1988). Hipotesis yang diuji adalah:
H0∶ �1 2 = �2 2 =⋯= ��2 = �2 (ketidakragaman antar wilayah/varians sama)
H1 : minimal ada satu ��2≠ σ2 (terdapat keragaman antar wilayah / bersifat heteroskedastisitas)
Statistik uji Breusch-Pagan (BP) adalah
BP = �1
2� ℎ
�� (���)−1��ℎ ~ � (2�)
Elemen vektor h adalah
hi =��� 2
�2 − 1�
dengan ei adalah kuadrat galat untuk pengamatan ke-i dan Z adalah vektor y berukuran n × 1 yang sudah dinormal standarkan untuk setiap pengamatan.
Kriteria uji BP �≤ �(�),
2 �������
2.6.2 Efek Defendensi Spasial (Spatial Dependence)
Spatial dependence muncul berdasarkan hukum Tobler I (1979) yaitu segala sesuatu saling berhubungan dengan hal yang lain tetapi sesuatu yang lebih dekat
mempunyai pengaruh yang besar. Penyelesaian yang dilakukan jika ada efek
dependensi spasial, adalah pendekatan area.
Anselin (1988) menyatakan bahwa uji untuk mengetahui Spatial dependence di dalam error suatu model adalah dengan menggunakan statistik
Moran’s I dan Langrange Multiplier (LM).
2.6.2.1 Moran’sI
Moran’s adalah sebuah tes statistik lokal untuk melihat nilai autokorelasi spasial,
yang mana digunakan untuk mengidentifikasi suatu lokasi dari pengelompokan
spasial atau autokorelasi spasial. Menurut Lembo (2006) dalam Kartika (2007)
autokorelasi spasial adalah korelasi antara variabel dengan dirinya sendiri
berdasarkan ruang. Cliff dan Ord (1973, 1981) menghadirkan uji statistik Moran’s
I untuk sebuah vektor observasi Yn = (Yn1, …, Ynn) pada n lokasi. Rumus Moran’s I untuk matrik pembobot (W) tidak dalam bentuk normalitas, adalah
I = �
∑��=1∑��=1��� −
��′����
��′�� (2.16)
Dengan eni = Yni - 1
�∑��=1��� adalah sebuah vektor deviasi untuk rata-rata sampel
Wn = [Wnij
I = ��′����
��′�� (2.17)
] adalah matrik bobot spasial. Rumus Moran’s I dengan matrik
pembobot (W) dalam bentuk normalitas, persamaan (2.16) direduksi menjadi
Nilai ekspektasi dari Moran’s I (Lee dan Wong, 2001) adalah
E(I) = I0 = − 1
Jika I > I0, maka nilai autokorelasi bernilai positif, hal ini berarti bahwa pola data membentuk kelompok (cluster), I = I0 artinya tidak terdapat autokorelasi spasial, dan I < I0 artinya nilai autokorelasi bernilai negatif, hal ini berarti pola data menyebar.
Uji statistik Moran’s I, dibatasi oleh 1.0 (yang berarti klaster spasial bernilai
autokorelasi positif) dan -1.0 (yang berarti klaster spasial berniali autokorelasi
negatif). Nilai autokorelasi spasial dikatakan kuat, apabila nilai tinggi dengan
tinggi atau nilai rendah dengan rendah dari sebuah variabel berkelompok dengan
daerah sekitarnya (common side).
Moran’s I scatterplot adalah sebuah diagram untuk melihat hubungan antara nilai
amatan pada suatu lokasi (distandarisasi) dengan rata-rata nilai amatan dari
lokasi-lokasi yang bertetanggaan dengan lokasi-lokasi yang bersangkutan (Lee dan Wong,
2001). Jika I > I0 maka nilai autokorelasi bernilai positf,sedangkan jika I < I0 maka nilai autokorelasi bernilai negatif. Pembagian kuadrannya (Perobelli dan
Haddad, 2003) adalah
Kuadran I disebut High-High, menunjukan nilai observasi tinggi dikelilingi oleh
daerah yang mempunyai nilai observasi yang tinggi berlawanan dengan kuadran
III disebut Low-Low, menunjukan nilai observasi rendah dikelilingi oleh daerah
yang mempunyai nilai observasi rendah. Kuadran II dai nilai observasi disebut
Low-High menunjukan nilai observasi rendah dikelilingi oleh daerah yang
mempunyai nilai observasi tinggi berkebalikan dengan kuadran IV disebut
High-Low, menunjukan nilai observasi tinggi dikelilingi oleh daerah yang mempunyai
nilai observasi yang rendah (Kartika, 2007).
2.6.2.2 Lagrange Multiplier (LM) Test
Uji LM (Lagrange Multiplier) digunakan untuk menentukan apakah model
memiliki efek spasial atau tidak. Lagrange Multiplier (LM) yang mana pada tes
ini, nilai sisa dari kuadrat terkecil dan hitungan matrik bobot spasial W. Bentuk
tes LM (Anselin, 1988), yaitu
LM SEM : LM = (1/T)(eTW2Y/ σ2)2 ~ �P
e : nilai residu dari hasil OLS
n : banyak observasi
Pada uji Lagrange Multiplier (LM), ada tiga hipotesis yang dilakukan, yaitu :
1. Untuk SAR, H0 : ρ = 0 dan H1 2. Untuk SEM, H
: ρ≠ 0
0∶ λ = 0 dan H1 3. Untuk mixture Model, H
∶λ≠0
0∶ρ, λ =0 dan H1 Dalam mengambil keputusan, tolak H
∶ρ, λ ≠0
0 jika LM > �P
2.7 Matriks Keterkaitan Spasial (Spasial Weight Matrices)
Bentuk umum matriks spasial (W) adalah
W = �
�11 … �1�
⋮ ⋱ ⋮
��1 … ���
� (2.20)
Pembentukan matriks keterkaitan spasial yang sering disebut matrik W dapat
menggunakan berbagai teknik pembobotan. Anselin (2002) mengusulkan 3 (tiga)
pendekatan untuk mendefenisikan matriks W, yaitu contiguity,distance, dan
general. Matriks W berdasarkan persentuhan batas wilayah yang bertetangga,
yaitu interaksi yang memiliki persentuhan batas wilayah (common boundary).
Sebuah matriks W yang dibentuk adalah simetrik dan diagonal utama selalu
bernilai nol seperti jika Wmn diberi nilai 1, maka Wnmbernilai 1 juga. Pada prakteknya, definisi batas wilayah tersebut memiliki beberapa alternatif. Secara
umum terdapat berbagai tipe interaksi, yaitu Rook contiguity, Bishop contiguity
dan Queen contiguity.
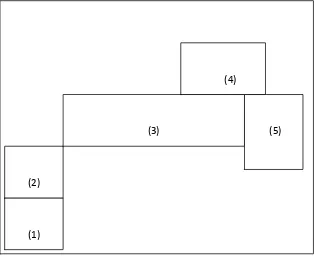
Berikut penjelasannya :
a. Rook contiguity ialah persentuhan sisi wilayah satu dengan sisi wilayah yang
lain yang bertetanggaan. Pada gambar 2.1, wilayah 1 bersentuhan dengan
wilayah 2 sehingga W12 = 1 dan yang lain 0 atau pada wilayah 3 bersentuhan dengan wilayah 4 dan 5 sehingga W34 =1, W35
b. Bishop contiguity ialah persentuhan vertek wilayah satu dengan wilayah
tetangga yang lain. Pada gambar 2.1, wilayah 2 bersentuhan titik dengan
wilayah 3 sehingga W
= 1 dan yang lain 0.
23
c. Queen contiguity ialah persentuhan baik sisi maupun vertek wilayah satu
dengan wilayah yang lain yaitu gabungan rook contiguity dan bishop
contiguity. Contoh W
= 1 dan yang lain 0.
Gambar 2.1 : Ilustrasi dari contiguity
Sumber : (James P. Lesage, 1998)
Matriks W yang merefleksikan queen contiguity pada gambar 2.1 adalah
0 1 0 0 0
1 0 1 0 0
Wqueen = 0 1 0 1 1 0 0 1 0 1
0 0 1 1 0
(1) (2)
(3) (5)
Matriks queen contiguity atau rook contiguity yang sudah diperoleh, dibentuk
kedalam bentuk matriks normalitas, yaitu matriks dimana jumlah dari setiap
barisnya adalah satu, sehingga matriks normalitas dari matrik Wqueen tersebut
adalah
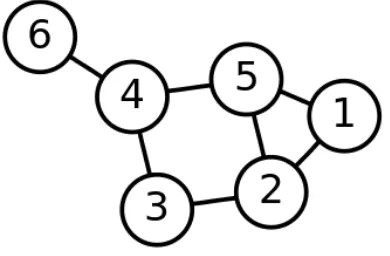
Teori graf adalah cabang kajian yang mempelajari sifat-sifat graf. Secara
informal, suatu graf adalah himpunan benda-benda yang disebut simpul (vertex
atau node) yang terhubung oleh sisi (edge) atau busur (arc). Biasanya graf
digambarkan sebagai kumpulan titik-titik (melambangkan simpul) yang
dihubungkan oleh garis-garis (melambangkan sisi) atau garis berpanah
(melambangkan busur). Suatu sisi dapat menghubungkan suatu simpul dengan
simpul yang sama. Sisi yang demikian dinamakan gelang (loop).