PROCED I N G CON FEREN CE I N TERN ATI ON AL M OD ELLI N G,
I D EN TI FI CATI ON AN D CON TROL ( Asia M I C 2 0 1 2 )
April, 2-4 2012. At, NUVOTEL PHUKET RESORT, T.PATONG, PHUKET, THAILAND
1
PRELIMINARY CONFERENCE PROGRAM
The 31
stIASTED Asian Conference on
Modelling, Identification, and Control (AsiaMIC 2012)
&
The 7
thIASTED International Conference on
Advances in Computer Science and Engineering (ACSE 2012)
April 2
–
4, 2012
Phuket, Thailand
LOCATION
Novotel Phuket Resort Kalim Beach, Patong Phuket 83150 Thailand
MODELLING, IDENTIFICATION AND
CONTROL (AsiaMIC 2012)
SPONSORS
The International Association of Science and Technology for Development (IASTED)
Technical Committee on Control and Intelligent Systems
Technical Committee on Modelling and Simulation
International Journal of Modelling and Simulation
World Modelling and Simulation Forum (WMSF)
CONFERENCE CHAIR
Assc. Prof. Wudhichai Assawinchaichote - King Mongkut's University of Technology Thonburi, Thailand
TUTORIAL CHAIR
Dr. Sarawut Sujitjorn - Suranaree University of Technology, Thailand
TUTORIAL SESSION
Asst. Prof. Mohamed Hamdi - Engineering School of Communication (Sup'Com), Tunisia
KEYNOTE SPEAKER
Dr. Sarawut Sujitjorn - Suranaree University of Technology, Thailand
INTERNATIONAL PROGRAM COMMITTEE
F. Abdul Aziz – Universiti Putra Malaysia, Malaysia
J. Abonyi – The University of Veszprém, Hungary
G. K. Adam – Technological Educational Institute of
Larissa, Greece
J. C. Amaro Ferreira – ISEL, Portugal
C. Angeli – Technological Institute of Piraeus, Greece
W. Assawinchaichote – King Mongkut's University of
Technology Thonburi, Thailand
F. Assous – Ariel University Center, Israel
H. Attia – McGill University and National Research
Council Canada, Canada
J. Boaventura – University of Tras-os-Montes and Alto
Douro, Portugal
W. Borutzky – Bonn-Rhein-Sieg University of Applied
Sciences, Germany
X. Chen – Shibaura Inst. of Tech., Japan
J. H. Chin – National Chiao Tung University, Taiwan
T. Dhaene – Ghent University, Belgium
A. Dolgui – School of Mines of Saint-Étienne, France
D. Dutta – Monash University, Australia
R. Dutta – University of New South Wales, Australia
J. Dvornik – University of Split, Croatia
A. Elkamel – University of Waterloo, Canada
L. Fan – Shenyang Institute of Chemical Technology, PR
China
P. Fishwick – University of Florida, USA
E. Furutani – Kyoto University, Japan
W. Ghie – Université du Québec en
Abitibi-Témiscamingue, Canada
D. Gorgan – Technical University of Cluj-Napoca,
Romania
G. A. Gravvanis – Democritus University of Thrace,
Greece
V. Grout – Glyndwr University, UK
K. E. Häggblom – Åbo Akademi University, Finland
D. He – CSSI, Inc., USA
R. Henriksen – Norwegian Univ. of Science and
Technology, Norway
D. Honc – University of Pardubice, Czech Republic
G. Horton – University of Magdeburg, Germany
E. Innocenti – University of Corsica, France
I. Jesus – Institute of Engineering of Porto, Portugal
V. Jotsov – SULSIT-State University in Sofia, Bulgaria
B. Kaewkham-ai – Chiang Mai University, Thailand
2
S. H. Kim – Korea Advanced Institute of Science and
Technology, Korea
C. Kyrtsou – University of Macedonia, Greece
K. Lavangnananda –King Mongkut’s University of
Technology Thonburi, Thailand
S. Lazarova--Molnar – United Arab Emirates University,
UAE
S. Liang – Chongqing University, PR China
A. Løkketangen – Molde University College, Norway
M. Lotfalian – University of Evansville, USA
P. Mahanti – University of New Brunswick, Canada
K. L. Man – Xi'an Jiaotong-Liverpool University , PR
China
T. Masood – Cranfield University, UK
R. V. Mayorga – University of Regina, Canada
N. Melao – Catholic University of Portugal, Portugal
S. Mitaim – Thammasat University, Thailand
Y. Morita – JAXA, Japan
P. Nahodil – Czech Technical University in Prague, Czech
Republic
S. Narayanan – Wright State University, USA
T. Niculiu – University , Romania
G. Nikolakopoulos – University of Patras, Greece
H. Oya – The University of Tokushima, Japan
G. Petuelli – South-Westphalia University of Applied
Sciences, Germany
C. Pinto – Instituto Superior de Engenharia do Porto,
Portugal
M. Poboroniuc – The Gheorghe Asachi Technical
University of Iasi, Romania
M. M. Polycarpou – University of Cyprus, Cyprus
P. Pongsumpun – King Mongkut's Institute of Technology
Ladkrabang, Thailand
Y. B. Reddy – Grambling State University, USA
M. Rodrigues – Sheffield Hallam University, UK
S. Sanguanpong – Kasetsart University, Thailand
Y. S. Shmaliy – Guanajuato University, Mexico
B. Singh – Lakehead University, Canada
R. Snow – Riddle Aeronautical University, USA
W. Song – National Tsing Hua University, Taiwan
R. Spolon – UNESP - State University of São Paulo, Brazil
G. Sun – Beijing University of Technology, PR China
J. A. Tenreiro Machado – Instituto Superior de Engenharia
do Porto, Portugal
A. Tornambè – University of Rome Tor Vergata, Italy
M. Trabia – University of Nevada, USA
H. Trinh – Deakin University, Australia
K. Tsakalis – Arizona State University, USA
H. Unger – Fern University in Hagen, Germany
G. Varga – University of Miskolc, Hungary
Q. G. Wang – National University of Singapore, Singapore
K. P. White – University of Virginia, USA
W. Yu – CINVESTAV-IPN (National Polytechnic
Institute), Mexico
S. H. Zeng – Beijing University of Technology, PR China
L. Zhang – Harbin Institute of Technology, PR China
T. Zhang – Tsinghua University, PR China
Z. Zhang – University of Exeter, UK
ADDITIONAL PAPER REVIEWERS
R. Lobato – UNESP - State University of Sao Paulo, Brazil
3
ADVANCES IN COMPUTER SCIENCE
AND ENGINEERING (ACSE 2012)
SPONSORS
The International Association of Science and Technology for Development (IASTED)
Technical Committee on Artificial Intelligence Technical Committee on Computer Graphics Technical Committee on Databases
Technical Committee on Parallel & Distributed Computing & Systems
Technical Committee on Software Engineering
TUTORIAL SESSION
Prof. Nader F. Mir - San Jose State University, USA
INTERNATIONAL PROGRAM COMMITTEE
D. Alcaide – University of La Laguna, Spain
N. Amano – Okayama University, Japan
C. Anderson – Colorado State University, USA
V. Bevilacqua – Polytechnic of Bari, Italy
M. Ceci – University of Bari, Italy
J. Chandy – University of Connecticut, USA
D. Chen – Uniformed Services University of the Health
Sciences, USA
S. Chittayasothorn – King Mongkut's Institute of
Technology Ladkrabang, Thailand
D. Connors – University of Colorado, USA
A. Cuzzocrea – University of Calabria, Italy
B. Dasgupta – University of Illinois at Chicago, USA
D. Dinakarpandian – University of Missouri-Kansas City,
USA
A. DUTTA – National Institute of Technology, Durgapur.,
India
E. Fink – Carnegie Mellon University, USA
E. Grant – University of North dakota, USA
J. Guo – California State University Los Angeles, USA
P. Gupta – Microsoft Corporation, U.S.A., USA
M. Halgamuge – Department of EEE, University of
Melbourne, Australia
N. Ikram – Riphah International University, Pakistan
N. Karacapilidis – University of Patras, Greece
M. Li – Nanjing University, PR China
K. M. Liew – City University of Hong Kong, PR China
J. Lindstrom – IBM, Finland
S. Lodha – University of California, Santa Cruz, USA
P. Mahanti – University of New Brunswick, Canada
P. Netinant – Illinois Institute of Technology, USA
M. Ogiela – AGH University of Science and Technology,
Poland
M. Ouyang – University of Louisville, USA
N. Passos – Midwestern State University, USA
K. Piromsopa – Chulalongkorn University, Thailand
S. Ponnabalam – Monash University, Malaysia Campus,
Malaysia
J. Puustjärvi – Helsinki University of Technology, Finland
O. K. SAHINGOZ – Turkish Air Force Adademy, Turkey
M. Sekijima – Tokyo Institute of Technology, Japan
S. M. Shamsuddin – Universiti Teknologi Malaysia,
Malaysia
B. Stantic – Griffith University, Australia
K. Sundaraj – University Malaysia Perlis, Malaysia
K. Takano – Kanagawa Institute of Technology, Japan
A. Takasu – National Institute of Informatics, Japan
N. Taylor – Heriot-Watt University, UK
I. F. Vega-López – Autonomous University of Sinaloa,
Mexico
D. Wang – University of Rochester Medical Center, USA
K. L. Wen – Chienkuo Technology University, Taiwan
H. Williams – Heriot-Watt University, UK
M. E. Yahia – King Faisal University, Saudi Arabia
S. Q. Zheng – The University of Texas at Dallas, USA
PLEASE NOTE
Paper presentations are 15 minutes in length with an additional 5 minutes for questions.
Report to your Session Chair 15 minutes before the
session is scheduled to begin.
Presentations should be loaded onto the
presentation laptop in the appropriate room prior to your session.
End times of sessions vary depending on the
4
PROGRAM OVERVIEW
Monday, April 2, 2012
07:00 – Registration
(Siam Foyer)
08:30 – AsiaMIC/ACSE Welcome Address
09:00 (Siam B Room)
09:00 – AsiaMIC Session 1 – Artificial Intelligence and
Soft Computing (A)
(Siam B Room)
09:00 - ACSE Session 1 – Software Engineering,
Computational Intelligence and Data Mining (A)
(Siam C Room)
11:00 – Coffee Break
11:30 (Siam Foyer)
11:30 – AsiaMIC Keynote Speaker – “The Roles of
Metaheuristics on Control Design Optimization
and Identification Research” – Dr. Sarawut
Sujitjorn
(Siam B Room)
12:30 – Lunch Break
(TBA)
14:00 – AsiaPES Keynote Speaker – “Phasor
Measurements as Smart Device for Observing
Power System Dynamics” – Prof. Yasunori Mitani
(Siam A Room)
15:00 – Coffee Break
15:30 (Siam Foyer)
15:30 – Asia MIC Session 2 – Artificial Intelligence and
Soft Computing (B)
(Siam B Room)
15:30 – ACSE Session 2 - Software Engineering,
Computational Intelligence and Data Mining (B)
(Siam C Room)
Tuesday, April 3, 2012
08:30 – AsiaMIC Session 3 – Fault Analysis and Process
Systems
(Siam B Room)
08:30 – ACSE Session 3 – Computer Networks,
Communication and Web Technologies
(Siam C Room)
10:30 – Coffee Break
11:00 (Siam Foyer)
11:00 – AsiaMIC Session 3 Continued
(Siam B Room)
11:00 – ACSE Session 3 Continued
(Siam C Room)
12:00 – Lunch Break
(TBA)
14:00 – AsiaMIC Tutorial Session – “Biologically–
Inspired Communication and Networking” –
Asst. Prof. Mohamed Hamdi
(Siam B Room)
14:00 – ACSE Tutorial Session – “Latest Applications in
Computer Networks: from IPTV to Mobile
Multimedia Networks” – Prof. Nader F. Mir
(Siam C Room)
16:00 – Coffee Break
16:30 (Siam Foyer)
16:30 – AsiaMIC Tutorial Session Continued
(Siam B Room)
16:30 – ACSE Tutorial Session Continued
(Siam C Room)
19:00 – Dinner Banquet
5
Wednesday, April 4, 2012
08:30 – AsiaMIC Session 4 – Modelling and Identification
(Siam B Room)
08:30 – AsiaMIC Session 5 – Optimization and Control
Applications
(Siam C Room)
10:30 – Coffee Break
11:00 (Siam Foyer)
11:00 – AsiaMIC Session 4 Continued
(Siam B Room)
11:00 – AsiaMIC Session 5 Continued
(Siam C Room)
12:30 – Lunch Break
(TBA)
14:00 – AsiaMIC Session 6 – Recent Advances in MIC
and their Applications
(Siam C Room)
15:00 – Coffee Break
15:30 (Siam Foyer)
15:30 – AsiaMIC Session 6 Continued
(Siam C Room)
Monday, April 2, 2012
07:00 – REGISTRATION
Location: Siam Foyer
08:30 – 09:00 AsiaMIC/ACSE WELCOME ADDRESS
Location: Siam B Room
09:00 – AsiaMIC SESSION 1 – ARTIFICIAL INTELLIGENCE AND SOFT COMPUTING (A)
Chairs: TBA
Location: Siam B Room
769-038
Fuzzy Control with Quadratic Performance for a Class of Nonlinear Systems
Dušan Krokavec and Anna Filasová (Slovakia)
769-072
KTX Noise ANC Performance Evaluation using a Multiple-LMS-based Neural Network
Hyeon Seok Jang, Kung Wan Koo, Young Min Lee, Young Jin Lee, and Kwon Soon Lee (Korea)
769-064
Dynamic Neural Network-based Fault Diagnosis of Gas Turbine Engines
Sina S. Tayarani-Bathaie, Zakieh Sadough, and Khashayar Khorasani (Canada)
769-058
Mathematical Modeling and Numerical Simulation for Microbial Depolymerization Processes of Exogenous Type
Masaji Watanabe and Fusako Kawai (Japan)
09:00 – ACSE SESSION 1 – SOFTWARE ENGINEERING, COMPUTATIONAL INTELLIGENCE AND DATA MINING (A)
Chairs: TBA
Location: Siam C Room
770-037
Application of Simulation Systems in Training Security Services
Grzegorz Gudzbeler, Mariusz Nepelski, and Andrzej Urban (Poland)
770-040
Proposal of Motion Caputuring System for Authentication
Keiichiro Awaji, Yutaro Watanabe, and Ryuya Uda (Japan)
770-032
Dynamic Simulation of a 3-D 4BL Engineering Problem using Augmented Reality
6
770-043
Top-View based Human Action Recognition using Depth and Color Information
Sittisuk Seawpakorn and Nikom Suvonvorn (Thailand)
770-039
Profile-based Action Recognition using Depth Information
Pongsatorn Chawalitsittikul and Nikom Suvonvorn (Thailand)
11:00 – 11:30 COFFEE BREAK
Location: Siam Foyer
11:30 – AsiaMIC KEYNOTE SPEAKER –“THE ROLES OF METAHEURISTICS ON CONTROL DESIGN OPTIMIZATION AND IDENTIFICATION RESEARCH”
Presenter: Dr. Sarawut Sujitjorn (Thailand) Location: Siam B Room
Many challenging applications in science, engineering and technology can be formulated as optimization problems. Some of them are complex and difficult to solve by an exact method within a reasonable amount of time. These problems usually contain multiple local solutions that can easily trap inefficient algorithms. Approximate algorithms are alternatives; among those metaheuristics have been main tools for solving this large class of problems.
Numerous metaheuristics are multi-discipline involving AI, soft-computing, computational intelligence, mathematical programming, operation research, and biology. In recent years, efficient metaheuristics have been developed for combinatorial, continuous, and multi-objective
optimization problems; they have found many successful real-world applications. Foremost applications include multi-objective control design optimization and complex model identification.
This lecture will deliver an orientation on metaheuristics, the quests on performance and convergence of algorithms, multi-objective control design optimization problems, model identification problems, generic, and specific algorithms. Illustrative algorithms are multi-path adaptive tabu search and co-operative adaptive bacterial-foraging-tabu-search algorithms. The following case studies serve to demonstrate the practicality and effectiveness of the algorithms:
identification of Stribeck friction model on a linear slide bed,
computational stability analysis based-on Lyapunov's direct method, and
extreme control design optimization of a road-way simulator.
The works to be presented have come from a team of researchers who fond of control and computing through our hard-working years. The followings are my students, colleagues and friends who deserve for acknowledgements: T. Kulworawanichpong, K-N. Areerak, K-L. Areerak, D. Puangdownreong, J. Kluabwang, N. Sarasiri, S. Phanikhom and K. Suthamno.
Sarawut Sujitjorn was awarded the BSc (Hons) degree in Electrical Engineering from the Royal Thai Air Force Academy, in 1984, and in 1987 the PhD degree in
Electronic & Electrical Engineering from the University of Birmingham, UK, where he worked on automated coast-control of rapid transit trains. He is currently a Professor of Electrical Engineering at Suranaree University of
Technology (SUT), Thailand, where he founded the School of Electrical Engineering, the Control & Automation Research Group, now the Power Electronics, Machines and Control Research Group, and co-founded the Scientific and Technological Equipment Centre. He is past Head of the EE School, Vice Rector for Academic Affairs and Director of the Research & Development Institute at SUT. He teaches postgraduate and undergraduate courses in Electric Circuits and Automatic Control. Before coming to SUT, Korat, he was a lecturer at the Royal Thai Air Force Academy from 1988-1993.
Prof Sujitjorn has worked in academia for over 20 years and has published over 150 research and technical papers, 17 patents, three books and one monograph. His research interests span the areas of control, electrical machine, power converter and computing, particularly the
application of metaheuristics to modelling, identification and control. He also serves the National Research Council of Thailand as sub-committee member and reader.
12:30 – LUNCH BREAK
TBA
14:00 – AsiaPES KEYNOTE SPEAKER –“PHASOR MEASUREMENTS AS SMART DEVICE FOR OBSERVING POWER SYSTEM DYNAMICS”
Presenter: Prof. Yasunori Mitani (Japan) Location: Siam A Room
7
PMU with GPS receiver is applied to the monitoring of AC power system dynamics and usually installed at substations of transmission lines.
On the other hand, our group is developing the system with PMUs installed at user power outlet; 100V in Japan and 240 V in Thailand. In Japan we are developing a power system monitoring system with PMUs installed at
University’s campuses, which is called Campus WAMS
(wide area measurement system). As a result, we can monitor the wide area power system stability and dynamics viewed from user side. In addition, we have developed a signal processing method with an FFT filtering or a wavelet transformation to eliminate the noises of voltage around user power outlets and a method to identify an equivalent vibration model for the evaluation of power system stability with the processed signals. The PMU system provides us useful information on phasor voltage distributions on the power system map. From these data we can get the
dynamic behaviors of power flows. In this context the PMU system is expected as a new device to support the smart grid.
This keynote speech presents some results on the power system observation in Japan and in South-East Asia (Singapore-Malaysia and Thailand).
Yasunori Mitani received the B.S., M.S., and D.Eng. Degrees in electrical engineering from Osaka University, Osaka, Japan, in 1981, 1983, and 1986, respectively. Currently he is a Professor in the Department of Electrical Engineering, Kyushu Institute of Technology, Fukuoka, Japan. He was a Visiting Research Associate at the University of California, Berkeley from 1994 to 1995. His research interests are in the areas of analysis and control of power systems.
15:00 – 15:30 COFFEE BREAK
Location: Siam Foyer
15:30 – AsiaMIC SESSION 2 – ARTIFICIAL INTELLIGENCE AND SOFT COMPUTING (B)
Chairs: TBA
Location: Siam B Room
769-018
Complete Stability Ranges of a Class of Interval Matrices - The Stability Feeler Approach
Tadasuke Matsuda, Michihiro Kawanishi, and Tatsuo Narikiyo (Japan)
769-013
Wavelet Feature Selection using Genetic Algorithms for Text Independent Speaker Recognition
Shung-Yung Lung (Taiwan)
769-039
PID Control for Micro-Hydro Power Plants based on Neural Network
Lie Jasa, Ardyono Priyadi, and Mauridhi H. Purnomo (Indonesia)
769-053
Evapotranspiration Prediction using System Identification and Genetic Algorithm
Robiah Ahmad, Saiful Farhan Mohd Samsuri, and Mohd Zakimi Zakaria (Malaysia)
15:30 – ACSE SESSION 2 – SOFTWARE ENGINEERING, COMPUTATIONAL INTELLIGENCE AND DATA MINING (B)
Chairs: TBA
Location: Siam C Room
770-014
Hybrid Algorithm using Genetic Algorithm and EDA Introducing Partial Search
Kenji Tamura (Japan)
770-034
A Hybrid CS/DE Algorithm for Global Optimization
Mansooreh Soleimani, Shahriar Lotfi, and Amirhossein Ghodrati (Iran)
770-044
Implementation of Hybrid Naive Bayesian-Decision Tree for Childhood Obesity Predictions
Muhamad Hariz B. Muhamad Adnan, Wahidah Husain, and Nur`Aini Abdul Rashid (Malaysia)
770-019
An Interdisciplinary Approach to Automatically Capture Knowledge in Dialogues on the Spot
Keedong Yoo (Korea)
770-015
Influence Nets based Decision Support System
8
Tuesday, April 3, 2012
08:30 – AsiaMIC SESSION 3 – FAULT ANALYSIS AND PROCESS SYSTEMS
Chairs: TBA
Location: Siam B Room
769-026
Modelling Researches of the Limitations for
Fault-Tolerance Measurements of Ultra Small Displacements and Vibrations
Alexander V. Liapidevskiy, Vadim A. Zhmud,
Denis O. Tereshkin, and Vladimir I. Gololobov (Russia)
769-015
The Improvement of Modulating Function Method for Fast Identification of Parameter Faults in Linear Continuous Systems
Witold Byrski and Jędrzej Byrski (Poland)
769-016
Tolerating Permanent Changes of State Transitions in Asynchronous Machines
Seong Woo Kwak and Jung-Min Yang (Korea)
769-041
Effects of Foot Shape on Fault Tolerant Gaits of a Quadruped Robot
Seong Woo Kwak and Jung-Min Yang (Korea)
769-011
Determining Water Patterns in Chakmak Canal and Pradoo Bay, Rayong Province, Thailand
Nuanchan Singkran (Thailand)
769-021
Tracking of Choke Pressure during Managed Pressure Drilling
Espen Hauge, Ole Morten Aamo, and John-Morten Godhavn (Norway)
769-045
Dynamic Modelling of Gas Rising in a Wellbore
Espen Hauge, John-Morten Godhavn, Øyvind N. Stamnes, and Ole Morten Aamo (Norway)
769-032
Studies on the Measurement of Achievement in Simple Arithmetic Drills from the Inflections of Event-Related Potentials
Miki Shibukawa, Mariko Funada, and Yoshihide Igarashi (Japan)
769-024
Petri Net Representation of Switched Stochastic Systems
Jiaying Ma, Jueliang Hu, Zuohua Ding, and Jing Liu (PR China)
769-036
Impact-Echo Non-Destructive Testing and Evaluation with Time-Frequency Process and Analysis
Mark Emde and Ruichong Zhang (USA)
08:30 – ACSE SESSION 3 – COMPUTER NETWORKS, COMMUNICATION AND WEB TECHNOLOGIES
Chairs: TBA
Location: Siam C Room
770-002
Analysis of IPTV Traffic over Computer Communication Networks
Nader F. Mir, Mohit Vashisht, and Sagar Agarwal (USA)
770-025
A Framework for Evaluation of 3G Communication Systems
Freeha Azmat and Junaid Imtiaz (Pakistan)
770-030
Improvement on Enhanced Secure Anonymous Authentication Scheme for Roaming Service in Global Mobility Networks
Iuon-Chang Lin and Chen-Hsiang Chen (Taiwan)
770-020
Application of Wireless Sensor Networks to the In-Line River Monitoring of Nitrate
Alberto Bonastre, Juan Vicente Capella, Rafael Ors, and Miguel Peris (Spain)
770-013
Personalizing the User's Physical Environment in a Pervasive System
Elizabeth Papadopoulou, Sarah Gallacher, Nick K. Taylor, and Howard Williams (UK)
770-051
Lifelog Ontology Schema Definition for Personal Identification
Yuuki Hotta, Haruki Ogata, and Ryuya Uda (Japan)
770-036
GuideME: An Effective RFID-based Traffic Monitoring System
9
10:30 – 11:00 COFFEE BREAKLocation: Siam Foyer
11:00 – AsiaMIC SESSION 3 CONTINUED
Location: Siam B Room
11:00 – ACSE SESSION 3 CONTINUED
Location: Siam C Room
12:00 – LUNCH BREAK
TBA
14:00 – AsiaMIC TUTORIAL SESSION –
“BIOLOGICALLY-INSPIRED COMMUNICATION AND NETWORKING”
Presenter: Asst. Prof. Mohamed Hamdi(Tunisia) Location: Siam B Room
Bio-inspired networking and communication protocols and algorithms are devised by considering biology as source of inspiration, and by adapting behaviors, laws, and dynamics governing biological systems. While the literature related to biologically-inspired computing is abundant, the focusing on the application of biological concepts in networking is still in infancy. In this tutorial, we address the applicability of biological mechanisms and techniques in various communication fields. Particularly, we explore the mechanisms and the challenges in embedded
communication systems with primary focus on recent applications of bio-inspired techniques in communication networks. Nonetheless, the results that have been reached so far show that this area is very promising.
Objectives
The tutorial is at the graduate school level and is accessible to postgraduate level. It is intended to introduce the tutees to the biologically-inspired concepts that are being intensively used by the scientific community in the computer science and communication networks fields.
The content of the tutorial is structured as follows: 1. Social insects and insect colony: The use of insect mobility models to solve optimization algorithms will be illustrated.
2. Epidemic worm spreading: Stochastic models for the propagation of digital worms will be investigated. 3. Artificial immune systems: Security and protection systems that mimic natural immunity systems will be described.
4. Cognitive networks: This new concept, which is becoming very popular in the context of wireless networks and radio communications, will be studied.
5. Homeostatic communication systems: The use of homeostasis in self-organizing ad hoc and sensor networks will be addressed.
6. Firefly synchronization: This nonlinear model for microcontroller design will be illustrated and discussed.
Timeline
Time allocations for the major course topics
1. Overview on biologically-inspired schemes (30 minutes) 2. Social insects and insect colony (30 minutes)
3. Epidemic worm spreading (30 minutes) 4. Artificial immune systems (30 minutes) 5. Cognitive networks (30 minutes)
6. Homeostatic communication systems (30 minutes) 7. Firefly synchronization (30 minutes)
The level of presentation assumes that the attendees have a background knowledge in computer science and
communication network architectures. More precisely, the key pre-requisites relate to algorithms and data structures, network protocols, and communication architectures.
Dr. Mohamed Hamdi (PhD, habilitation) co-authored more than 80 scientific publications published in
international journals and conferences. He has also chaired and co-chaired international conferences and special issues
in international conferences including the ‘Trust, Security, and Privacy’ symposium in the IEEE IWCMC 2012 conference and for the special issue on ‘Web Services in Multimedia Communication’ for the journal on Advances
in Multimedia. He presented multiple tutorials and invited speeches in international conferences such as the GEOSS Forum (Globecom 2011). In addition, Dr. Hamdi has been invited at the ITU World Telecom conference to serve as a panellist in a forum on the security of social networks. He also passed prestigious professional certifications including the CISSP and the CISCO Security certifications. He is conducting research activities in the areas of wireless sensor networks, risk management, algebraic modeling, relational specifications, intrusion detection, and network forensics.
14:00 – ACSE TUTORIAL SESSION –“LATEST APPLICATIONS IN COMPUTER NETWORKS: FROM IPTV TO MOBILE MULTIMEDIA NETWORKS”
Presenter: Prof. Nader F. Mir(USA) Location: Siam Room
We are witnessing the Internet applications such as mobile multimedia over IP network technology being destined to play an increasingly important role in communication systems. With the demand for multimedia applications, there will be a growing interest in identifying suitable network architectures and transmitting facilities for this technology. Communication industry has spent
considerable effort in designing an IP-based media
10
networks that can deliver voice-band telephony with the quality of the telephone networks. The Internet offers phone services less expensive and with numerous additional features such as video conferencing, online directory services, and the Web incorporation.
In this tutorial, we present the fundamentals the latest applications in computer networks. Applications such as Video on Demand (VoD) IPTV, VoIP, and also Multimedia over IP networks schemes. We explain the transportation of real-time signals along with the signaling protocols used in voice over IP (VoIP) telephony and multimedia
networking. The tutorial covers the signaling protocols as H.323 series of protocols, and Session Initiation Protocol (SIP) which are responsible for session signaling. The H.323 protocols interact to provide ideal telephone communication, providing phone numbers to IP address mapping, handling digitized audio streaming in IP
telephony, and providing signaling functions for call setup and call management. The H.323 series support
simultaneous voice and data transmission and can transmit binary messages that are encoded using basic encoding rules. We also review the Session Initiation Protocol (SIP) as one of the most important VoIP signaling protocols operating in the application layer of TCP/IP model. SIP can perform both unicast and multicast sessions and supports user mobility and handles signals and identifies user location, call setup, call termination, and busy signals. SIP can use multicast to support conference calls and uses the Session Description Protocol (SDP) to negotiate
parameters.
The tutorial further covers Compression of multimedia components such as Digital Voice and Video, focusing on data-compression techniques for voice and video to prepare digital voice and video for multimedia networking will be [resented. The topic starts with the analysis of information-source fundamentals, information-source coding, and limits of data compression and explains all the steps of the conversion from raw voice to compressed binary form, such as sampling, quantization, and encoding. The discussion also summarizes the limits of compression and explains typical processes of still-image and video-compression techniques, such as JPEG, MPEG, and MP3.
The tutorial will then present real-time transport protocols, such as Time Transport protocol (RTP) and the Real-Time Control Protocol (RTCP). The next topic is streaming video in a single server, using content distribution networks (CDNs). Also discussed is the Stream Control
Transmission Protocol (SCTP), which provides a general-purpose transport protocol for transporting stream traffic. The tutorial describes detailed streaming source modeling and analysis. In real-time applications, a stream of data is sent at a constant rate. This data must be delivered to the
appropriate application on the destination system, using real-time protocols. The most widely applied protocol for real-time transmission is the Real-Time Transport Protocol (RTP), including its companion version: Real-Time Control Protocol (RTCP). UDP cannot provide any timing
information. RTP is built on top of the existing UDP stack. Real-time applications may use multicasting for data delivery.
We also cover video streaming that presents a significant challenge to network designers. A video in a single server can be streamed from a video server to a client at the client request. The high bit-rate video streaming must sometimes pass through many Internet service providers, leading to the likelihood of significant delay and loss on video. One practical solution to this challenge is to use content distribution networks (CDNs) for distributing stored multimedia content. Video streaming, e-mail, and image packets in the best-effort Internet are mixed in the output queue of the main exit router of a domain. Under such circumstances, a burst of packets, primarily from the image file source, could cause IP video streaming packets to be excessively delayed or lost at the router. One solution in this case is to mark each packet as to which class of traffic it belongs to. This can be done by using the type of-service (ToS) field in IPv4 packets. As seen in the figure,
transmitted packets are first classified in terms of their priorities and are queued in a first in, first out (FIFO) order. The priority of an image file can be equal to or less than the one for video streaming, owing to the arrangement of purchased services.
The Tutorial will then focus on the Stream Control
11
Timeline
Overview of IP Telephony (0.5 hour)
•VoIP Signaling Protocols •H.323 Protocols
•Session Initiation Protocol (SIP) •Softswitch and MGCP
Overview of Digital Voice and Compression (1 hour)
•Signal Sampling
•Quantization and Distortion
•Still Images and JPEG Compression
•Raw-Image Sampling and DCT •Quantization and Encoding
•Moving Images and MPEG Compression •MP3 and Streaming Audio
•Limits of Compression with Loss •Basics of Information Theory •Entropy of Information •Shannon’s Coding Theorem
•Compression Methods Without Loss
•Run-Length Encoding •Huffman Encoding
•Lempel-Ziv Encoding
•FAX Compression for Transmission
Video Streaming Applications and Real-Time Media Transport Protocols (1 hour)
•Real-Time Transport Protocol (RTP)
•Real-Time Control Protocol (RTCP)
•Estimation of Jitter in Real-Time Traffic
•Distributed Multimedia Networking
•Stream Control Transmission Protocol (SCTP) •SCTP Packet Structure
•Self-Similarity and Non-Markovian Streaming Analysis
•Self-Similarity with Batch Arrival Models
•Content Distribution Networks (CDNs)
•CDN Interactions with DNS •Multimedia Security •Providing QoS to Streaming •IPTV
•Video on Demand (VOD) Technology
Mobile multimedia and Voice and Video Streaming over Wireless Networks (1 hour)
•Introduction to WiMAX technology
•Mobile Transport Protocols •Mobile Computing and Mobile IP •TCP and UDP for Mobility •Protocols for Voice over Mobile IP
•Protocols for Video Streaming over Mobile IP
Audience can be from academia or industry. Any
individual with basic knowledge of computer science and engineering can benefit from this tutorial.
Nader F. Mir received a B.Sc. degree with honors in electrical and computer engineering in 1985 and MSc and PhD degrees, both in electrical engineering, from
Washington University in St. Louis, in 1990 and 1994, respectively.
He is currently a Professor and Department Associate Chairman of Electrical Engineering at San Jose State University, California. He is also the Director of the MSE Program in Optical Sensors Networks for Lockheed Martin Space Systems.
His research interests are analysis of computer
communication networks, design and analysis of switching systems, network design for wireless ad hoc, internet and sensor systems, information systems and applications of digital integrated circuits in computer communications.
16:00 – 16:30 COFFEE BREAK
Location: Siam Foyer
16:30 – AsiaMIC TUTORIAL SESSION CONTINUED
Location: Siam B Room
16:30 – ACSE TUTORIAL SESSION CONTINUED
Location: Siam C Room
19:00 – Dinner Banquet
12
Wednesday
,
April 4, 2012
08:30 – AsiaMIC SESSION 4 – MODELLING AND IDENTIFICATION
Chairs: TBA
Location: Siam B Room
769-044
Modelling Dependencies and Couplings in the Design Space of Meshing Gear Sets
Mohammad Rajabalinejad (The Netherlands)
769-030
Internal Model Control of Piezoelectric Actuator based on Sandwich Model with Hysteresis
Yangqiu Xie, Yonghong Tan, Ruili Dong, and Hong He (PR China)
769-086
A Model Reflecting the Changes of ERPs during Repeated Learning of Calculations
Mariko Funada, Yoshihide Igarashi, Tadashi Funada, and Miki Shibukawa (Japan)
769-065
A Bayes Shrinkage Estimation Method for Vector Autoregressive Models
Sung-Ho Kim and Namgil Lee (Korea)
769-027
Linear System Analysis and State Observer Design of Grid Connected Inverter Model based on System Identification
Nopporn Patcharaprakiti, Jatturit Thongprong,
Krissanapong Kirtikara, and Jeerawan Saelao (Thailand)
769-004
A Short Contribution on Efficient Modelling of Parallel Queues
Nader F. Mir (USA)
769-069
3D Modeling of a Class of Objects in Different Engineering Analysis Field
Mei Chen, Fei Zheng, and Na Li (PR China)
769-071
Modeling of a Large Deployable Space Antenna Structure
Fei Zheng, Mei Chen, and Peng Li (PR China)
769-006
The Novel Analytical Probabilistic Model of Random
Variation in the MOSFET’s High Frequency Performance
Rawid Banchuin (Thailand)
769-059
Study on Bird Flu Infection Process within a Poultry Farm with Modeling and Simulation
Masaji Watanabe (Japan) and Tertia Delia Nova (Indonesia)
08:30 – AsiaMIC SESSION 5 – OPTIMIZATION AND CONTROL APPLICATIONS
Chair: TBA
Location: Siam C Room
769-012
Memoryless Solution to the Infinite Horizon Optimal Control of LTI Systems with Delayed Input
Francesco Carravetta, Pasquale Palumbo, and Pierdomenico Pepe (Italy)
769-029
An Optimizing Parameter-Tuning of Multi-Loop Controllers for Boiler Combustion Process
Hong He and Yonghong Tan (PR China)
769-087
Optimal Frequency Regulation of a Single-Area Power System
Sayed Z. Sayed Hassen and Mohamed I. Jahmeerbacus (Mauritius)
769-082
Optimal Vibration Control of a Rectangular Piezothermoelastic Plate
Marwan Abukhaled and Ibrahim Sadek (UAE)
769-028
Local Controllability of Fractional Discrete-Time Semilinear Systems with Multiple Delays in Control
Jerzy Klamka (Poland)
769-083
Enhanced Simplified Decoupling for Multivariable Processes with Multiple Time Delays
Truong Nguyen Luan Vu and Moonyong Lee (Korea)
769-096
Active Noise Control in Large Industrial Halls
Marek Pawelczyk (Poland)
769-005
Applying Posture Identifier and Backstepping Method in the Design of an Adaptive Nonlinear Predictive Controller for Nonholonomic Mobile Robot
13
769-089
Fractional Order Controller and its Applications: A Review
Swati Sondhi and Yogesh V. Hote (India)
769-061
A Cost-Effective, Robust and an Efficient Design of a Motor Controller for UGVs
Soyiba Jawed, Freeha Azmat, and Muhammad Z. Khan (Pakistan)
10:30 – 11:00 COFFEE BREAK
Location: Siam Foyer
11:00 – AsiaMIC SESSION 4 CONTINUED
Location: Siam B Room
11:00 – AsiaMIC SESSION 5 CONTINUED
Location: Siam C Room
12:30 – LUNCH BREAK
TBA
14:00 – AsiaMIC SESSION 6 – RECENT ADVANCES IN MIC AND THEIR APPLICATIONS
Chairs: TBA
Location: Siam C Room
769-031
Firmware for the Receiving and Processing of Meteorological Information from the Space Satellites
“AKTOMIKA”
Alexander V. Liapidevskiy, Vladimir I. Gololobov, Vadim A. Zhmud, Anton V. Zakharov, and Aleksey S. Drozdov (Russia)
769-054
Modelling of a Hobbing Tool Series for Generating Spur Gears with Circular Fillet
Andromachi N. Zouridaki (Greece)
769-010
A Web System that Allows for Decision-Making through Citizen Participation
Mahito Hosoi and Yukio Uchida (Japan)
769-078
Analysis, Evaluation, and Design of an Overlapped Ultrasonic Sensor Ring for Minimal Positional Uncertainty in Obstacle Detection
Sungbok Kim and Hyunbin Kim (Korea)
769-056
Simulation and Comparative Studies of Dead Space Loading for Human Respiratory Control under Exercise and CO<sub>2</sub> Inhalation
Shyan-Lung Lin and Nai-Ren Guo (Taiwan)
769-095
The Application of GPU-based K-Means in Analysis of RFID Data
Huifang Deng, Zhen Liang, and Chunhui Deng (PR China)
769-050
Mold Filling Simulation in the Injection Molding Process with OpenFOAM Software for Non-Isothermal Newtonian Fluid
Farivar Fazelpour, Majid Vafaeipour, Habib Etemadi, Amir Dabbaghian, Raoof Bardestani, and
Mohammadreza Dehghan (Iran)
769-035
Anomaly Detection based on GA&FART Approach of Computer Network Security
Preecha Somwang, Woraphon Lilakiatsakun, and Surat Srinoy (Thailand)
769-051
Causal Impact Price Transmission of the Rice Markets in Thailand
Wanvilai Chulaphan (Taiwan), Chalermpon Jatuporn (Thailand), Shwu-En Chen (Taiwan), and
Pattana Jierwiriyapant (Thailand)
769-033
An Intelligent Flow Measurement Scheme using Ultrasonic Flow Meter
Santhosh K. Venkata and Binoy K. Roy (India)
15:00 – 15:30 COFFEE BREAK
Location: Siam Foyer
15:30 – AsiaMIC SESSION 6 CONTINUED
Location: Siam C Room
************************************************
IASTED would like to thank you for attending AsiaMIC and ACSE 2012. Your participation helped
make this international event a success, and we look forward to seeing you at upcoming IASTED events.
PID CONTROL FOR MICRO-HYDRO POWER PLANTS BASED
ON NEURAL NETWORK
Lie Jasa , Ardyono Priyadi , Mauridhi Hery Purnomo A) B) C)
A)
Electrical Engineering Udayana University, Bali, Indonesia. Email: [email protected]
B)
Electrical Engineering of Institut Teknologi Sepuluh Nopember, Surabaya, Indonesia. Email: [email protected]
C)
Electrical Engineering of Institut Teknologi Sepuluh Nopember, Surabaya, Indonesia. Email: [email protected]
ABSTRACT
Micro-hydro power plants are power plants with small capacity, which is built in specific locations. The main problem of micro-hydro is the voltage generated is not stable at 220 VA and frequency of 50 Hz. A micro-hydro that was constructed by Lie Jasa et al. in Gambuk village at Pupuan sub-district, Tabanan district of Bali province, Indonesia in 2010 is still an open loop system in which spin turbine is stable when it is set from the high water level in reservoirs. This will be problematic when the generator load changes. This study will overcome the problem by proposing to build a closed loop system from the change in output frequency for the control circuit. The control circuit is a circuit constructed neural network-based PID control by using the Brandt-Lin algorithm to control the governor. The governor function is to regulate the amount volume of water running into turbine. By applying Matlab simulation, the result shows that the best output is obtained when the the change in frequency will stabilize at about 40 seconds and using the value of Kp = 0.0637533, Ki=0.00021801 and Kd=0.00301846.
KEY WORDS
PID, Turbine, Neural network, Micro-hydro, Frequency
1. Introduction
There is a growing research related to micro-hydro, such as the advanced control of micro-hydro [1], the simulation of ANN Controller of Automatic Generation Control micro-hydro [2], Artificial Neural Networks to Predict River Flow Rate into Dam of Micro-hydro [3]. Scholars also have studied neural network focused on control sensor base linearization Neural Network [4], and Experimental Study of Neural Network Control System for Micro Turbines [5]. Research on a series of neural-based PID control with a variety of algorithms has also been conducted, such as PID-Neural Controller based on the AVR Atmega 128 [6], the PID-Controller based on BP neural network in the application of wind power generation [7], Application of Neural Network to Load-Frequency Control in Power Systems [8], Automatic
tuning of PID controller using Particle Swarm Optimization (PSO) algorithm [9], and Design for Auto-tuning PID controller based on Genetic Algorithms [10]. The study specifically control systems based on PID neural network with Brandt-Lin algorithm to control the micro-hydro that does not exist. Researchers have also studied micro-hydro using PI controller based on NN- perceptron [1], however, there is no research on PID control system is based Neural Network with Brandt-Lin algorithm. This paper discusses this system to determine the values of Ki, Kp and Kd simulated with a micro-hydro plants, which has already existed [13].
The main purpose of this paper is to build a model-based neural network PID control that is used to control the Micro-Hydro Power (MHP). This control is set to be able to control the turbine rotation to become stable at a certain round when the load changes. The system is a closed loop control using feedback from the output of the generator. By adjusting the volume of water from the spill away through the governor, the turbine rotation can be maintained automatically. With the stability of turbine rotation, the generator will generate a voltage stabilized at 220 VA with a frequency of 50 Hz.
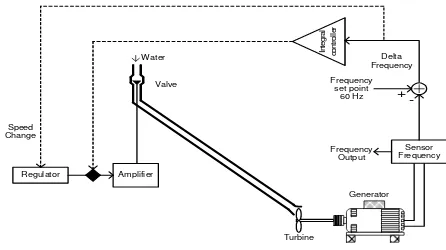
2. Plant Models and Control for MHP Plants
Automatic control system of micro-hydro is built in a closed loop. First some water are flow in the valve, it continue to the spill way and rotate the turbine.
Water
Turbine
Generator Sensor Frequency Frequency
Output Frequency
set point 60 Hz
In
te
g
ra
l
c
o
n
tr
o
lle
r
Amplifier Regulator
Valve
-+
Delta Frequency
Speed Change
Figure 1. System Control of Micro-Hydro
Proceedings of the IASTED Conference
April 2 - 4, 2012 Phuket, Thailand
Modelling, Identification, and Control (AsiaMIC 2012) Asian
The generator will produces electricity in the next step and output it will through on the sensor frequency. The frequency measurement will be compared with the reference frequency. Difference frequency ( f) will be entered into the control integrator. It will used to set and behind the valve. The Illustration it is of control system shown in Fig 1.
Plants models for MHP plant was controlled using a servo motor as governor in the study by M. Hanmandlu [1]. Consists of five blocks: (1). PI control, (2). Governor, (3). Servo motor, (4). Turbine and (5). Generator, Detail of model MHP as shown in Fig 2.
PI 1 / R
1
(1+sT2)
(1-sTw1)
(1+0.5sTw1)
Kp
1+sTp
PL 1
(1+sT3)
Figure 2. Model of MHP using servomotor as a Governor [1]
The transfer function for the servo motor based governor was written like equation 1 as :
)
1
(
1
)
1
(
1
)
(
2
1
sT
sT
s
G
+
+
=
...1)Where T1 = mechanical time constant and T2 = Electronic time constant. In addition, unity gain is applied as a feedback. A PI Controller with the following transfer function is superimposed on the servomotor based governor as :
s
Ki
Kp
s
G
(
)
=
+
...2)Where Kpl = Proportional constant, Ki = Integral sonstant
2.1 Existing Plant Model
Plant models of a micro-hydro that was constructed by Lie Jasa et al. in Gambuk village at Pupuan sub-district, Tabanan district of Bali province, Indonesia in 2010. Existing Plant Model MHP shown in Fig. 3. The part components of the plant were: 1). 2 meters diameter of water turbine; 2). 25 meters of spill away; 3). Tansfer pulley; and 4). generator. The video of this plant can be
watched on
http://www.youtube.com/watch?v=IdyVX_1RQGs. The plant is now capable to generate electrical energy of approximately 1000 VA 5000 VA installed capacity. The amount can be supplied to 10 houses for power at night. The plant, however, has not been yet equipped with the control circuit that can control the governor to produce the
output of generator of the frequency of 50Hz and voltage at 220V. This problem becomes a central focus on this research.
Figure 3. Existing Plant Model MHP at Gambuk, Pupuan, Tabanan, Bali, Indonesia[13]
Figure 4. Existing Turbine Plant Model MHP [13]
a. Spill away
Spill away is used to channel water from top to bottom and direct the water flow onto the turbine. The length of pipe diameter will affect the volume of water that runs. The larger the volume of water passes the bigger water impetus to the turbine. The spill away allows placing micro-hydro in the secure area from flooding during the wet season.
b. Governor
c. Water turbine
Turbines are used to change water energy into mechanical energy. Turbine that is connected with some pulleys is used to turn a generator. Past studies used turbine [13] sizing diameter of 2 meters, width of 30 cm, weight of 300 kg and material of iron. The larger the volume of water turning turbine, the greater mechanical energy produced. Besides the volume of water, water pressure falls on the turbine help to speed the turbine rotation. Overshot water turbines works with the water that falls into the blades of upper side, because of the gravity of water, turbine wheel can spin. Existing of turbine plant model MHP is show Fig. 4.
d. Generator
Generator is used to transform energy mechanic into electric energy. By rotating magnetic field on the rotor, it will cause the magnetic field in the stator. The magnetic field that occurs at the stator with certain patterns will produce electric. The larger the generator is used, the greater the electrical energy generated.
2.2 Neural Network Control for MHP Plants
a. PID Control
A PID-Controller with the following transfer function is superimposed on the servomotor based governor as :
Kds
s
Ki
Kp
s
G
(
)
=
+
+
...3)Where it’s Kp = proportional constant, Ki = integral constant and Kd = derivative constant.
System control close loop with feedback control system is illustrated in Fig. 5; where r, e, u, y are respectively the reference, error controller output and controlled variables. PID-Controller block receives input e (t) and produces output u, where u is the combined output of all components Ki, Kp and Kd such as shown in equation 3.
MHP Plant y(t) e(t) PID Controller + -r(t) u
Figure 5. Micro-hydro power with feedback control [9]
Where is PID-Controller in time described in equation (3) as:
dt
t
de
(
)
K
dt
e(t)
K
e(t)
K
u(t)
=
p+
i+
d .………4)Where u(t) is the controller output, et is the error, and t is the sampling instance.
b. Brandt-Lin Algorithm Neural Network
The Brandt-Lin algorithm which is originated from gradient descent considers a complex system consisting of subsystems, called nodes which interact with each other through connection weights. Fig. 6 shows a typical system, which is decomposed for Brandt-Lin algorithm.
Node 11 Node 21 Node 12 Node 22 Node 31 Input Layer Hiden Layer Output Layer W11 W22 W12 W21 W13 W23 y1 y2 x11 x22 x21 x12 y1 y2 y1 x11 x21 1 1 2 2 2 2 2 2 2 2 2 2 3 3 3 3 3
Figure 6. A typical decomposition of a systems for Brandt-Lin algorithm [6]
Brandt-Lin algorithm is given in the following theorem. Theorem : For the systems with dynamics given by
=
= − p j i i ij i j ij
F
w
y
y
1 1 1
If connections weights are adapted according to
w
y
x
F
y
E
y
w
w
w
ij iIv q
k j j
i jk i jk ij 1 1 1 1 1 1 1 1 1
)
(
1
− = + +∂
∂
−
=
γ
Then the performance index it will decrease monotonically with time.
c. PID-Controller with Neural Network
The controller based on neural network has ability to make the unstable system because of its nonlinearity and input-output mapping. In addition, training procedure enables the controller to adapt changes of plant or noise. Neural control system is shown in Fig.5. The PID-Neural controller has 3 inputs and 1 output. The inputs are created by proportion, integration and derivation of error between reference input and output.
function x x
e
e
x
+
−
=
1
1
)
(
1σ
, gauss-function
2
2
(
)
1
+
−
−
=
x xx x
e
e
e
e
x
σ
, and that of output layer is
linier function
σ
3(
x
)
=
x
.s 1 s MHP PLANTS Ti Td Kp y(t) Neural Network
e (t) u(t)
r(t)
+
-eI eD eP
Figure 7. Training blocks PID Neural Network [6]
W1 11 W1 32 W1 21 tansig Gauss W2 11 W2 21 Purelin ep eD ei U S1 1 S1 2 Z1 1 Z1 2 S2 1
Figure 8. Structure of the neural network [6]
During the period of settling time, ep and eD decrease. At first, ep and eD are large, raising the need of large control step for quick going into settling time state. Then when nearly coming to settling state, ep and eD are smaller and smaller, requiring small control step for accurate control. During the period of settling time ei increases, at first, ei is small, raising the need of large control step for quick going into settling state. Then when nearly coming to settling state, ei is larger and larger, requiring small control step for accurate control.
Calculating output of the neural network is following[6] :
1 1
S
=W
111 . ep + 1 32W
.eD and 1 1Z
= σ1(1 1
S
)1 2
S
=W
211 . ei andZ
21= σ1(S
12)u =
W
111.Z
11 +W
211.Z
12Trained the neural network using Brandt-Lin algorithm is following[6] :
2 11
W
= γZ
11e2 21
W
= γZ
12e1 11
W
= σ1 (1 1
S
) 1 1 1 1 1 1 2 11 2 11 1 1)
(
Z
E
e
S
W
W
z
e
p pσ
σ
γσ
−
2 11 1 1W
e
Z
E
β
δ
δ
−
=
σ1 ( 1 1
S
) =)
1
)(
1
(
2
1 1 1 1 1 1 1 s se
e
s
− −−
+
=
δ
δσ
1 11W
= σ1 (1 1
S
)+
e
Z
W
W
e
p 1γ
1 2 11 2 11
= σ1 ( 1 1
S
)+
e
Z
e
Z
W
e
pγ
γ
1 1 1 1 2 11= 2γ
γσ
1(
S
11)
e
peW
1122 11 1 1 1 1
32
2
(
S
)
e
eW
W
=
γσ
i2 21 1 2 2 1
21
2
(
S
)
e
eW
W
=
γσ
Dσ2 1 2
S
) =+
−
−
+
−
−
=
− − − − 2 1 2 2)
1
)
2
1 2 1 12 1 2 12 1 2 1 12 1 2 12 s s s s s s s se
e
e
e
e
e
e
e
s
δ
δσ
d. Data Simulation of MHP Plants
Data simulation in this paper uses combination data research [1][13], total rate capacity change from 50 KW to 5 KW, the normal operating load of 25 KW was changed to 1 KW. This is done to adjust with the existing MHP plant, detail as shown in Table 1.
Table 1. Data plant MHP simulation
No Data Value
1. Total rated capacity 5 Kw 2. Normal Operating Load 1 Kw
Assumption: Load-frequency dependency is linier. Nominal Load = 48%=0.48; Pd =3%=0.03. The dumping parameter [4,7],
D = p/
Hz
pukW
x
x
f
D
0
.
0016
/
5
60
1
48
.
0
p/
∂
=
=
∂
=
Generator parameter are :
Kp = 1/D = 625 Hz/pu kW
Tp =
onds
xD
f
xH
sec
161,458
2
0=
3. Formulation of Plant Models for MHP
Plant
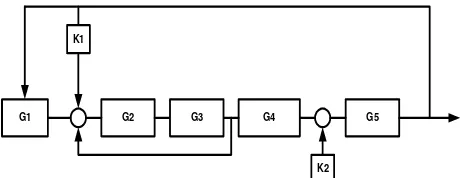
The block diagram of the MHP Plant with PID-Controller is shown in Fig. 9. This plant can be reduced to a simpler transfer function representation as in Fig.10.
Kpi+Ki/s+Kd s 1 / R
1 (1+sT2) (1-sTw1) (1+0.5sTw1) Kp 1+sTp PL 1 (1+sT3) f
XE1 XE2 XE3 Pg f
f
PID Controoler Governor Servo motor Turbin Generator
Figure 9. Models of MHP plant using servomotor as governor with PID-Controller
Each block of Fig. 9 as following equation :
Kds
s
Ki
Kp
G
1=
+
+
,)
1
(
1
2 2sT
G
+
=
,)
1
(
1
3 3sT
G
+
=
,)
1
5
.
0
1
(
)
1
(
2 1 4sT
sTw
G
+
−
=
,)
1
(
5 PsT
Kp
G
+
=
,R
K
1=
1
,Pl
K
2=
∆
G1 G2 G4 G5
K2 G3
K1
Figure 10. Model of micro-hydro power plant with transfer function
With the simplification process of the transfer function, Fig.9 above can be changed to be seen in Fig. 10.
K1.G2.G3.G4.G5 1+G2G3 K2.G5 G1 K1 y u e r
Figure 11. Simplifying the model MHP Plant
The transfer function for plant analysis MHP is:
5 2 3 2 5 4 3 2 1
1
)
(
K
G
G
G
G
G
G
G
K
s
G
c+
+
=
………(5)Equation 5 shows the transfer function of the MHP Plant, while the block G1/K1 is part of the PID-Controller consisting of components of Ki, Kp and Kd as in equation 3. Firstly, the value of Ki, Kp and Kd is counted using trial and error method. Secondly, training process is applied offline employing Brandt-Lin algorithm, in order to calculate the weight of each neuron as in Fig. 8. With Matlab simulation results obtained, each value of Kp = 0.0637533, Ki and Kd = 0.00021801 = 0.00301846. By entering KI, Kp and Kd values into formula (3) is obtained an equation (6) as:
s
s
G
1=
0.0637533
+
0.00021801
+
0.00301846
……….6)
4. Simulation PID-Controller for MHP
Plants
Figure 12. Simulink model of PID-Controller
The Simulink MHP plant (Fig. 13) was the reference of MHP plant Fig. 9, Table 1 and it was of Simulink PID-Controller Fig.12.
Figure 13. Model of MHP Plant using the Servomotor with PID-Controller
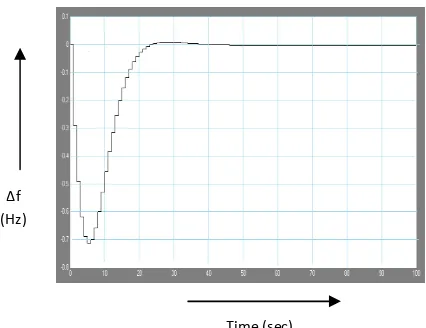
Figure 14. f for one gate schema using servomotor with PID-Controller
To run the simulation model MHP Fig. 13 above, we chose the Following values: Kn = 1, KaKg / Kc = 1; Tf = 0001 second; Kp = 0.0637533, Ki and Kd = 0.00021801 = 0.00301846. The simulation results showed that to make
the MHP plant to be stable, it takes a f of 35 Hz as shown in Fig. 14 and P1 by 40 second as in the Fig. 15
Figure 15. Pl for one gate schema using servomotor with PID-Controller.
In this paper showed that MHP Plant-based PID-Controller using neural network obtained better results. By using the value of Kp = 0.0637533, Ki and Kd = 0.00021801 = 0.00301846. MHP plant will stabilize at about 40 seconds. PID-Controller is able to maintain stability in 35 seconds starting from the beginning of the load changes.
Acknowledgement
The Author to convey gratitude to the Ministry of Education and Culture that has provided scholarships through the BPPS program and the national strategic research fund in 2010.
References
[1] M.Hanmandlu, Himani Goyal, Proposing a new advanced control technique for micro hydro power plants, Journal Electrical Power and Energy System, 30(2008), pages 272-282. [2] J.A. Jaleel, T.P. Imthias Ahammed, Simulation
of Artificial Neural Network Controller for Automatic Generation Control of Hydro Electric Power System IEEE Region 10 Conference Publication, Tencon 2008,, pages 1-4.
[3] K.Ichiyanagi Y.Goto K.Mizuno, Y. Yokomizu T. Matsumura, An Artificial Neural Network to Predict River Flow Rate into a Dam for a Hydro-Power Plant, Proceding IEEE International Publication Neural Network, 1995 Vol. 5, pages 2679-2682.
Time (sec) ∆f
(Hz)
Time (sec) ∆Pl
per uni MW
[4] G.L. Dempsey, N.L Alt, B, A, Olson, and J.S.Alig, Control Sensor Linearization Using a Microcntroller-Based Neural Network, C, IEEE International Conference Computational Cybernetics and Simulation, Vol. 4, 1997, Pages 3087-3083.
[5] Tian-hong ZHANG, Xianghua HUANG and Qiu-hua LI, The Experimental Study of Neural Network Control System for a Micro Turbin Engine, Proceding of the 7th Asian Control Conference, Hongkong, China, 27-29 August 2009, Pages 1264-1267.
[6] Xuan Khanh Phan, Doan Que Anh Vo, Ngoc Hai Nguyen, The Phong Cao, PID-Neural Controller Based on AVR Atmega128, IEEE International on Control Automation, Robotics and Vision, Hanoi, Vietnam, 17-20 December 2008, Pages 1573-1576.
[7] Francoise Beaufays, Youssef Abdel-Magid, Bernard Widrow, Application of Neural Network to Load-Frequency Control in Power Systems, Journal Neural Networks, Vol. 7, No. 1, 1994, Pages 183-194.
[8] KAN Jiangming, LIU Jinhao, Selft-Tuning PID Controller Based on Improved BP Neural
Network, IEEE, International Conference on Intelligent Computation Technology and Automation, 2009, pages 95-98.
[9] S.J. Bassi, M.K. Mishra, E.E. Omizegba, Automatic tuning of Proportional-Integral-Derivative (PID) controller using Particle Swarm Optimization (PSO) Algorithm, International Journal of Artificial Intelligence & Application (IJAIA) Vol. 2, No. 4 October 2011, pages 25-34. [10] Liu Fan, Er Meng Joo, Design for Auto-tuning
PID Controller Based on Genetic Algorithms, IEEE, ICIEA 2009, pages 1924-1927.
[11] Karl J. Astrom, Bjorn Wittenmark, Computer-Controlled Systems Theory and Design, 3th, ( USA : Prentice-Hall,1997).
[12] Richard C.Dorf, Robert H.Bishop, Modern Control System (New Jersey : Prentice-Hall, 2001).
[13] Lie Jasa, Putu Ardana, I Nyoman Setiawan, Usaha Mengatasi Krisis Energi Dengan Memanfaatkan Aliran Pangkung Sebagai Sumber Pembangkit Listrik Alternatif Bagi Masyarakat Dusun Gambuk –Pupuan-Tabanan, Seminar Nasional Teknologi Industri XV, ITS Surabaya, 2011, pages B0377-B0384

![Figure 6. A typical decomposition of a systems for Brandt-Lin algorithm [6]](https://thumb-ap.123doks.com/thumbv2/123dok/697972.282304/17.612.55.281.561.613/figure-typical-decomposition-systems-brandt-lin-algorithm.webp)
![Figure 7. Training blocks PID Neural Network [6]](https://thumb-ap.123doks.com/thumbv2/123dok/697972.282304/18.612.57.281.320.424/figure-training-blocks-pid-neural-network.webp)