BAB II
DASAR TEORI
Pada bab ini akan dibahas teori-teori pendukung yang digunakan sebagai acuan
dalam merancang sistem.
2.1. Kajian Pustaka
2.1.1. Perancangan Sistem Kontrol dan Algoritma Untuk Optimalisasi Gerakan dan Kestabilan pada Robot Humanoid (Yonas Aditya Darmawan, 2014)[1] Pada tugas akhir ini juga dirancang algoritma cut motion untuk robot Kondo KHR
3 HV. Sistem kontrol pada robot dibagi menjadi 2 bagian, yaitu kontrol aktuator dan
kontrol utama. Kontrol aktuator berupa servo controller yang mengatur sistem gerak
robot. Kontroller utama bertugas mensinkronisasi gerak robot dengan perintah dari
smartphone yang telah diolah melalui mikrokontroler.
Keberhasilan proses cut motion saat robot melakukan pergantian gerakan tanpa
adanya delay dari program sudah mencapai 95,3% untuk semua kemungkinan
perpindahan motion yang biasa dilakukan robot. Dan kecepatan rata-rata yang dicapai
robot adalah 14,53 cm/detik. Robot banyak mengalami kegagalan saat peralihan antara
gerakan maju kecil ke gerakan maju kurva dikarenakan pertambahan kecepatan yang
terlalu drastis.
2.1.2. Perancangan Algoritma dan sistem gerakan pada RoboSoccer R2C R9 (Robotis GP) (Kurnia Sanjaya 2015)[2]
Pada perancangan tugas akhir ini, penulis membuat sebuah algoritma pemotongan
siklus gerakan robot dalam melangkah atau cut motion untuk menciptakan pergerakan
robot yang lebih dinamis dan respon robot yang lebih cepat pada robot humanoid Robotis
GP.
Algoritma cut motion merupakan algoritma memotong gerakan di mana robot
diperintah untuk mengganti gerakan sebelum pose gerakan selesai dengan cara memberi
nilai pada setiap pose gerakan robot, sehingga robot dapat mengetahui posisi terakhir
robot. Ketika robot mengetahui posisi terakhirnya maka robot dapat mengetahui langkah
Robot dapat melakukan cut motion dengan keberhasilan 100% dan peralihan
motion berulang dengan keberhasilan mencapai lebih dari 75%. Rata-rata kecepatan robot
dalam merespon perintah adalah 356,67 mili detik. Kecepatan gerakan robot untuk
gerakan maju 10,59 cm/detik, mundur 10,51 cm/detik, geser kanan 3,6 cm/detik, geser
kiri 3,5 cm/detik, putar kanan 22,67 °/detik, dan putar kiri 26,06 °/detik.
2.1.3. Online Walking Pattern Generation and Its Application to a Biped Humanoid Robot —KHR-3 (HUBO) (Ill-Woo Park, et. al. 2008 )[3]
Penulis dari jurnal ini mengusulkan sebuah metode pembangkitan gerakan berjalan
yang sederhana untuk robot humanoid KHR-3 (HUBO). Permasalahan dari realisasi
gerakan berjalan pada robot humanoid meliputi dua hal: pembangkitan pola gerakan
berjalan dasar dan kompensasi yang dibutuhkan untuk menjaga keseimbangan robot.
Pola gerakan berjalan KHR-3 memiliki empat mode: maju/mundur, kiri/kanan,
berjalan kurva, dan berputar arah. Pola berjalan pada jurnal ini memungkinkan variasi
pada pola, waktu, dan jarak untuk tiap langkah berjalan. Pola gerakan berjalan dihasilkan
berdasarkan bentuk matematis sederhana dari kurva lintasan, terutama kurva sinus,
cosinus, linear, dan polinomial orde tiga, dan superposisi dari kurva-kurva tersebut
digunakan untuk mengurangi kompleksitas dan beban komputasi.
Penulis menggunakan polinomial orde tiga untuk menghasilkan lintasan panggul
robot. Dengan bantuan persamaan zero-moment point (ZMP) sederhana, lintasan panggul
dapat dibentuk sehingga memiliki hubungan langsung dengan lintasan ZMP.
2.2. Konsep Gerakan Berjalan Humanoid
Humanoid memiliki sistem berjalan bipedal, atau memiliki dua tungkai. Hal
tersebut menimbulkan berbagai tantangan dalam mewujudkan sebuah robot atau mesin
yang dapat berjalan hanya dengan dua tungkai, karena gerakan berjalan bipedal
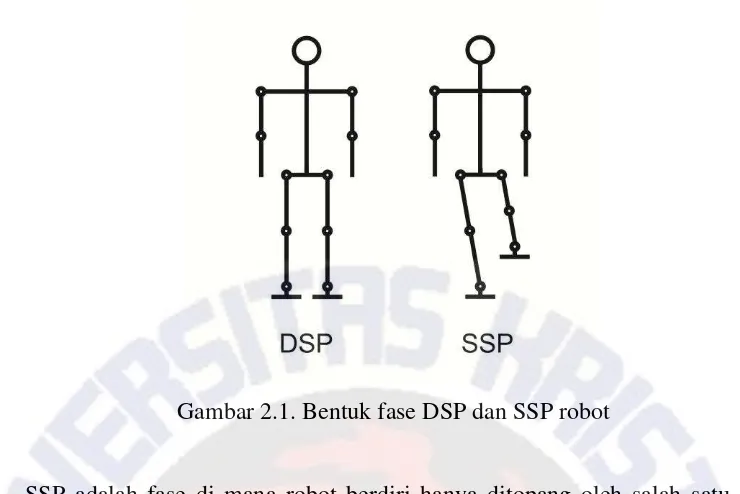
membutuhkan dua fase saat berjalan atau melangkah: fase penunjang tunggal atau single
support phase (SSP) dan fase penunjang ganda atau double support phase (DSP) (Gambar
Gambar 2.1. Bentuk fase DSP dan SSP robot
SSP adalah fase di mana robot berdiri hanya ditopang oleh salah satu tungkai,
sedangkan DSP adalah fase ketika robot berdiri ditopang oleh kedua tungkai[4]. Siklus
pergantian dari kedua fase tersebut yang membentuk sebuah pola gerakan berjalan, di
mana dibutuhkan bentuk fase yang memungkinkan robot untuk tetap tegak atau
seimbang. Keseimbangan robot pada kedua fase tersebut ditentukan oleh proyeksi pusat
massa robot pada bidang transversal terhadap support polygon. Support polygon adalah
daerah yang terbentuk dari kontak telapak kaki pada permukaan lapangan yang
membentuk bentuk polygon seperti pada Gambar 2.2[4]. Supaya keseimbangan robot
tercapai maka proyeksi pusat masa harus berada di dalam area support polygon.
Gambar 2.2. Support Polygon dengan warna abu-abu: (a) Double Support Polygon, (b)
Sistem gerakan berjalan robot dapat dibedakan menjadi dua berdasarkan kriteria
kestabilannya :
1. Static Walking
Static walking adalah cara berjalan robot di mana titik pusat masa atau
center of mass (CoM) robot selalu berada di dalam area support polygon pada
setiap waktu (Gambar 2.3)[4]. Dengan kata lain, robot seimbang secara statis,
di mana bila gerakan berjalan dihentikan pada posisi apapun robot akan tetap
stabil atau dalam posisi berdiri. Hal tersebut mencakup fase DSP maupun fase
SSP. Sistem berjalan seperti ini memerlukan telapak kaki yang cukup luas
dan sendi engkel yang kuat. Selain itu kecepatan berjalan robot harus rendah
supaya gaya inersia robot tidak mempengaruhi keseimbangan.
Gambar 2.3 Posisi CoM terhadap support polygon untuk static walking
2. Dynamic Walking
Dynamic walking adalah cara berjalan yang memungkinkan pusat masa atau
center of mass (CoM) robot keluar dari area support polygon (Gambar
2.4)[4]. Tidak ada kriteria absolut yang menyatakan apakah dynamic walking
stabil atau tidak, tetapi apabila robot memiliki sendi engkel aktif dan selalu
memiliki minimal satu kaki yang menyentuh tanah maka ZMP atau
zero-moment point dapat dijadikan kriteria keseimbangan. ZMP adalah titik di
mana momentum sudut total pada telapak kaki sama dengan nol. Selama ZMP
dinamis. Dynamic walking memungkinkan robot untuk memiliki ukuran
telapak kaki yang lebih kecil dan gerakan berjalan yang lebih cepat.
Gambar 2.4 Posisi CoM terhadap support polygon untuk dynamic walking
2.3. Ruang Kartesian Tiga Dimensi
Dalam matematika, sistem koordinat kartesius digunakan untuk menentukan posisi
sebuah titik dalam ruang tiga dimensi dengan menggunakan tiga buah bilangan yang
disebut koordinat x, koordinat y, dan koordinat z. Dalam tugas akhir ini titik yang
diproyeksikan dalam ruang kartesian adalah titik pada pergelangan kaki atau engkel, dan
titik pada panggul atau pelvis.
Proyeksi titik engkel dan panggul dilihat dari tiga bidang anatomis manusia, di
mana postur dilihat dari tiga bidang sisi seperti pada Gambar 2.5. Yang pertama adalah
bidang sagital, bidang ini membagi tubuh menjadi kiri dan kanan, atau dalam bidang
kartesian adalah bidang XY. Yang kedua adalah bidang frontal/coronal, yang membagi
tubuh menjadi depan dan belakang. Bidang tersebut merupakan bidang YZ. Dan yang
terakhir adalah bidang transversal, yaitu bidang XZ[4].
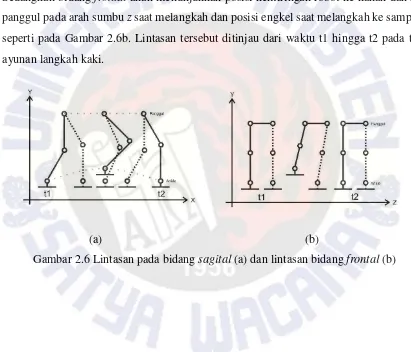
Laju robot ke depan atau belakang akan dilihat berdasarkan proyeksi laju engkel
dan panggul pada bidang sagital atau arah koordinat x dan y seperti pada Gambar 2.6a.
Sedangkan bidang frontal akan menunjukkan posisi kemiringan robot ke kanan dan kiri
panggul pada arah sumbu z saat melangkah dan posisi engkel saat melangkah ke samping
seperti pada Gambar 2.6b. Lintasan tersebut ditinjau dari waktu t1 hingga t2 pada tiap
ayunan langkah kaki.
(a) (b)