BAB I
PENGENALAN KONSEP SISTEM KONTROL
1.1
Konsep Dasar Sistem KontrolDewasa ini kontrol automatik telah memegang peranan penting dalam perkembangan ilmu pengetahuan. Kemajuan pada teori kontrol dan praktis yang sangat pesat memberikan kemudahan dalam mendapatkan unjuk kerja sistem dinamik, mempertinggi kualitas, menurunkan biaya produksi, mempertinggi laju produksi, dan meniadakan pekerjaan-pekerjaan rutin dan membosankan yang biasa dilakukan manusia maka diperlukan pemahaman yang baik pada bidang ini.
Pada umumnya suatu sistem apapun yang berada di alam ini mempunyai ciri-ciri, diantaranya terdapat tujuan tertentu pada sistem itu. Selain itu, adanya berbagai komponen pada sistem tersebut, pada komponen-komponen tersebut mempunyai fungsi masing-masing yang merupakan suatu kesatuan. Dengan kata lain, sistem terdiri atas komponen-komponen yang mempunyai fungsi masing-masing dan saling bekerja sama untuk mencapai suatu tujuan tertentu yang telah ditetapkan.
Sistem kontrol merupakan proses pengaturan atau pengendalian terhadap satu atau beberapa besaran (variabel, parameter) sehingga didapatkan suatu harga atau didapatkan harga-harga dalam suatu range
(jangkauan ) tertentu.
Sistem kontrol juga merupakan sebuah sistem dimana komponen-komponennya dihubungkan sedemikian rupa sehingga membentuk sebuah konfigurasi sistem. Sistem kontrol tersebut mengatur sistemnya sendiri atau sistem yang lain sehingga didapatkan tanggapan sistem yang diinginkan.
Pemakaian sistem kontrol banyak dijumpai dalam kehidupan sehari-hari baik dalam pemakaian langsung maupun tidak langsung. Sistem kontrol tersebut umumnya merupakan sistem yang pengontrolannya menggunakan cara manual otomatis.
Sistem kontrol otomatis merupakan sistem kontrol loop tertutup dengan acuan masukan atau keluaran yang dikehendaki dapat konstan atau berubah secara perlahan dengan berjalannya waktu. Tugas utama sistem kontrol adalah menjaga keluaran yang sebenarnya pada harga yang diinginkan dengan adanya gangguan dalam sistem. Sebagai contoh sistem kontrol otomatis adalah sebagai berikut:
a. Pengontrolan proses, misalnya pengontrolan temperatur, aliran, tekanan, tinggi permukaan cairan, pH, dan sebagainya.
c. Pengontrolan numerik yaitu pengontrolan operasi yang membutuhkan ketelitian tinggi dalam proses yang berulang-ulang. Misalnya pembuatan lobang, tekstil, pengelasan, dan sebagainya. d. Transportasi, misalnya elevator, eskalator, ban berjalan,
kereta api, pesawat terbang, dan sebagainya. e. Servomekanis
f. Bidang non teknik, misalnya bidang ekonomi, sosiologi, dan biologi.
Sebagai dasar dalam menganalisis dan mendesain sistem kontrol adalah dengan menggunakan teori sistem linier. Plant atau proses yang akan dikontrol dapat direpresentasikan oleh hubungan sebab akibat, hal tersebut dapat dilihat dalam Gambar 1.1. Input merupakan sesuatu yang diinginkan dalam sistem kontrol, sedangkan output merupakan sesuatu yang terjadi atau merupakan tanggapan sistem.
P e n g e n a l a n K o n s e p S i s t e m P e n g a t u r a n
S i s t e m :
- m e m p u n y a i t u j u a n
- t e r d i r i d a r i k o m p o n e n - k o m p o n e n
- k o m p o n e n - k o m p o n e n t e r s e b u t m e m p u n y a i f u n g s i m a s i n g - m a s i n g y a n g m e r u p a k a n s u a t u k e s a t u a n 1 . 1 . K o n s e p D a s a r S i s t e m K o n t r o l
D a s a r u n t u k m e n g a n a l i s i s d a n m e n d e s a i n s i s t e m k o n t r o l a d a l a h t e o r i s i s t e m l i n i e r
P l a n t a t a u p r o s e s y a n g a k a n d i k o n t r o l
d a p a t d i r e p r e s e n t a s i k a n o l e h h u b u n g a n s e b a b a k i b a t
S i s t e m k o n t r o l a d a l a h h u b u n g a n a n t a r a k o m p o n e n - k o m p o n e n y a n g m e m b e n t u k s e b u a h k o n f i g u r a s i s i s t e m u n t u k
m e n d a p a t k a n t a n g g a p a n s i s t e m y a n g d i i n g i n k a n
p l a n t a t a u p r o s e s o u t p u t
i n p u t
1
Gambar 1.1 Hubungan Sebab Akibat dalam Sistem Kontrol.1.2 Klasifikasi Sistem Kontrol
Sistem kontrol dapat diklasifikasikan dengan berbagai cara, diantaranya adalah sebagai berikut.
1.2.1 Sistem Loop Terbuka dan Loop Tertutup
Sistem loop terbuka menggunakan peralatan penggerak untuk mengontrol proses secara langsung tanpa umpan balik. Pada sistem ini harga keluaran sistem tidak dapat dibandingkan terhadap harga masukannya. Dengan kata lain keluaran tidak memberikan efek terhadap besaran masukan atau variabel yang dikontrol tidak dapat dibandingkan terhadap harga yang diinginkan. Umumnya masukan sistem dipilih berdasarkan pengalaman. Sistem loop terbuka mempunyai ciri-ciri, diantaranya sederhana, harganya murah, dapat dipercaya, dapat kurang akurat karena tidak terdapat koreksi terhadap kesalahan, dan berbasis waktu.
digambarkan dalam bentuk diagram balok seperti yang terlihat dalam Gambar 1.2.
C o n t o h L o o p T e r b u k a
i n p u t ( p e n g e s e t a n d a y a 1 K W a t a u 2 K W )
P la n t o u t p u t
( t e m p e r a t u r r u a n g a n ) Gambar 1.2 Diagram Balok Sistem Loop Terbuka Sistem Pengaturan Temperatur Ruangan.
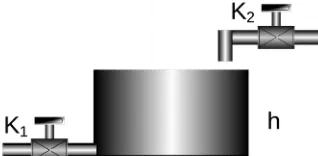
Contoh sistem loop terbuka yang lain adalah sistem pengaturan permukaan cairan dalam tangki (lihat Gambar 1.3). Pada sistem tersebut diinginkan tinggi permukaan cairan, h, tetap walaupun fluida pada katub K1
berubah-ubah. Hal tersebut dapat dicapai dengan pengaturan secara manual pada katub K2 pada waktu tertentu sesuai pengalaman operator.
Gambar 1.3 Sistem Pengaturan Permukaan Cairan dalam Tangki
.
Sistem tersebut dapat digambarkan dengan diagram balok sebagai seperti terlihat dalam Gambar 1.4.P e n g e n a l a n K o n s e p S i s t e m P e n g a t u r a n
S i s t e m P e n g a t u r a n L o o p T e r b u k a c o n t o h :
* s i s t e m p e n g a t u r a n p e r m u k a a n t a n g k i
- h t e t a p w a l a u a l i r a n f l u i d a p a d a k a t u b K 1 b e r u b a h - u b a h - d i c a p a i d e n g a n p e n g a t u r a n s e c a r a m a n u a l p a d a k a t u b K2 p a d a w a k t u t e r t e n t u
D i a g r a m B a l o k : i n p u t
( h y a n g d i i n g i n k a n )
S i s t e m P e n g a t u r a n ( k a t u b K2 d a n o p e r a t o r )
o u t p u t ( h s e s u n g g u h n y a )
7
Gambar 1.4 Diagram Balok Sistem Loop Terbuka Sistem Pengaturan Permukaan Cairan dalam Tangki.Gambar 1.5 Sistem Pengaturan Posisi Sudut Peluncur Rudal.
Sedangkan diagram balok sistem pengaturan posisi sudut peluncur rudal tersebut dapat dilihat dalam Gambar 1.6.
- v
P e n g e n a l a n K o n s e p S i s t e m P e n g a t u r a n
S i s t e m P e n g a t u r a n L o o p T e r b u k a * s i s t e m p e n g a t u r a n p e l u n c u r r u d a l
- p o s i s i s u d u t p e l u n c u r r u d a l d i a t u r
- k o m a n d o ( p o t e n s i o m e t e r ) u n t u k m e n g g e r a k k a n p e l u n c u r r u d a l
i n p u t
( p o s i s i s u d u t y a n g d i k e h e n d a k i )
S i s t e m P e n g a t u r a n ( P e n g u a t d a y a & M o t o r )
o u t p u t
( p o s i s i s u d u t y a n g t e r j a d i )
- s i n y a l k o n t r o l d i p e r k u a t m e n g g e r a k k a n m o t o r y a n g t e r h u b u n g d e n g a n p e l u n c u r
P e n g u a t
D a y a M o t o r s i n y a l
k o n t r o l
l o k a s i r e m o t e + v
8
Gambar 1.6 Diagram Balok Sistem Pengaturan Posisi Sudut Peluncur Rudal.Agar posisi sudut tersebut akurat, maka pada sistem loop terbuka tersebut harus memenuhi syarat-syarat diantaranya adalah sebagai berikut:
a. Peluncur rudal harus dikalibrasi secara tepat dengan referensi posisi sudut potensiometer.
b. Karakteristik potensimeter, penguat, motor harus konstan. Sistem loop tertutup menggunakan pengukuran keluaran dan mengumpanbalikkan sinyal tersebut untuk dibandingkan dengan keluaran yang diinginkan (input atau referensi). Atau dengan kata lain keluaran dapat memberikan efek terhadap besaran masukan atau besaran yang dikontrol dapat dibandingkan terhadap harga yang diinginkan. Sinyal diumpanbalikkan terhadap kontroler yang akan membuat pengubahan terhadap sistem agar keluaran sistem seperti yang diinginkan
Perbandingan sistem loop tertutup terhadap loop terbuka adalah sebagai berikut:
Suatu proses dalam sistem loop tertutup secara fungsional
dapat dinyatakan dalam diagram balok, seperti terlihat dalam Gambar
1.7.
P e n g e n a l a n K o n s e p S i s t e m K o n t r o l
B l o c k D i a g r a m o f a f e e d b a c k c o n t r o l s y s t e m
R e f e r e n c e
I n p u t A c t u a t i n gS i g n a l C o n t r o l E l e m e n t : g 1
F e e d b a c k E l e m e n t s
h
M a n i p u l a t e d
V a r i a b l e C o n t r o l l e dO u t p u t D i s t u r b a n c e
P l a n t g 2
m f o r w a r d p a t h
f e e d b a c k p a t h
r + e=r b
b
c u
1 4
Gambar 1.7 Diagram Balok Sistem Loop Tertutup.Secara umum, komponen sebuah sistem kontrol loop tertutup terdiri dari :
a. Reference Input (masukan acuan, r), merupakan sinyal acuan bagi
sistem kontrol.
b. Actuating Signal (e), merupakan sinyal kesalahan/error. yang
merupakan selisih antara sinyal acuan (r) dan sinyal b.
c. Control Element, (g1) merupakan elemen yang berfungsi untuk
memproses kesalahan/error yang terjadi dan setelah kesalahan tersebut dimasukkan melalui elemen pengontrol.
d. Manipulated Variable (variabel yang dimanipulasi), merupakan
sinyal yang dihasilkan oleh control element yang berfungsi sebagai sinyal pengontrol tanpa adanya gangguan.
e. Plant/proses, merupakan obyek fisik yang dikontrol, dapat berupa
proses mekanis, elektris, hidraulis maupun gabungannya.
f. Disturbance, merupakan sinyal gangguan yang tidak diinginkan.
g. Feedback Element (jalur umpan balik), merupakan bagian sistem
yang mengukur keluaran yang dikontrol dan kemudian mengubahnya menjadi sinyal umpan balik.
h. Forward Path, merupakan bagian sistem tanpa umpan balik.
P e n g e n a l a n K o n s e p S i s t e m P e n g a t u r a n
1 . 1 S i s t e m K o n t r o l L o o p T e r t u t u p
B l o k d i a g r a m s i s t e m k o n t r o l m e n g g u n a k a n f e e d b a c k
i n p u t ( m a s u k a n )
d e t e k s i k e s a l a h a n
s u m b e r d a y a
u m p a n b a l i k
g a n g g u a n
R e s p o n s ( k e l u a r a n )
f o r w a r d p a t h
f e e d b a c k p a t h
A l a t K o n t r o l B e b a n
1 2
Gambar 1.8 Diagram Balok Sistem Kontrol menggunakan Feedback / Umpan Balik.Komponen sistem kontrol loop tertutup tersebut terdiri dari komponen-komponen sebagai berikut:
a. Input (masukan) merupakan rangsangan yang diberikan pada sistem
kontrol, merupakan harga yang diinginkan bagi variabel yang dikontrol selama pengontrolan. Harga ini tidak tergantung pada keluaran sistem.
b. Output (keluaran, respons) merupakan tanggapan pada sistem
kontrol, merupakan harga yang akan dipertahankan bagi variabel yang dikontrol, dan merupakan harga yang ditunjukkan oleh alat pencatat.
c. Beban/plant merupakan sistem fisis yang akan dikontrol (misalnya mekanis, elektris, hidraulik ataupun pneumatik).
d. Alat kontrol/kontroller merupakan peralatan/rangkaian untuk mengontrol beban (sistem). Alat ini bisa digabung dengan penguat. e. Elemen umpan balik menunjukkan atau mengembalikan hasil
pencatatan ke detektor sehingga bisa dibandingkan terhadap harga yang diinginkan (di stel)
f. Error detector (alat deteksi kesalahan) merupakan alat pendeteksi
kesalahan yang menunjukkan selisih antara input (masukan) dan respons melalui umpan balik (feedback path).
g. Gangguan merupakan sinyal-sinyal tambahan yang tidak diinginkan. Gangguan ini cenderung mengakibatkan harga keluaran berbeda dengan harga masukannya. Gangguan ini biasanya disebabkan oleh perubahan beban sistem, misalnya adanya perubahan kondisi lingkungan, getaran ataupun yang lain.
C o n t o h L o o p T e r t u t u p
i n p u t ( t e m p e r a t u r r u a n g a n y a n g d i h a r a p k a n )
o u t p u t
( t e m p e r a t u r r u a n g a n )
K o n t r o l e r P l a n t
P e n g e s e t a n d a y a y a n g d i h a r a p k a n
P e n g u k u r a n T e m p e r a t u r +
-Gambar 1.9 Diagram Balok Sistem Pengaturan Temperatur Ruangan Otomatis.
Sistem pengaturan permukaan cairan dalam tangki secara otomatis juga merupakan sistem loop tertutup seperti terlihat dalam Gambar 1.10. Dalam sistem tersebut diinginkan tinggi permukaan cairan dalam tangki, h, tetap walaupun aliran fluida pada katub K1 berubah-ubah. Jika permukaan
tangki tidak sesuai dengan yang diinginkan, akan terbentuk tegangan error e. Tegangan e diperkuat sehingga dapat memberikan input pada penggerak/ motor untuk membuka/ menutup katub K2.
Gambar 1.10 Sistem Pengaturan Tinggi Permukaan Cairan dalam Tangki Secara Otomatis.
Sedangkan diagram balok sistem pengaturan tinggi permukaan cairan dalam tangki secara otomatis dapat dilihat dalam Gambar 1.11.
Contoh sistem loop tertutup yang lain adalah sistem pengaturan posisi sudut peluncur rudal secara otomatis seperti terlihat dalam Gambar 1.12.
Gambar 1.12
Sistem Pengaturan Posisi Sudut Peluncur Rudal Secara Otomatis.1.2.2 Sistem linier dan tak linier
Kebanyakan sistem fisika merupakan sistem non linier dengan berbagai variasi. Jika range variasi variabel sistem tidak besar, maka sistem tersebut dapat dijadikan linier dalam range variasi variabel yang relatif kecil. Pada sistem linier, berlaku prinsip-prinsip super posisi. Prinsip tersebut tidak berlaku pada sistem non linier. (Bahasan selanjutnya mengenai sistem linier dan tak linier akan dibahas dalam Bab III)
1.2.3
Sistem kontrol berubah terhadap waktu (time-variant) dan sistem kontrol tak berubah terhadap waktu (time-invariant) Sistem kontrol tak berubah terhadap waktu (sistem kontrol koefisien konstan) merupakan sistem yang parameternya tidak berubah terhadap waktu. Tanggapan sistem tergantung pada waktu saat masukan diterapkan. Sistem kontrol berubah terhadap waktu adalah sistem yang satu atau lebih parameternya berubah terhadap waktu. Contoh sistem waktu kontrol berubah terhadap waktu adalah sistem kontrol kendaraan ruang angkasa, di mana massa menurun dengan berjalannya waktu karena bahan bakar digunakan selama penerbangan.1.2.4
Sistem kontrol waktu kontinyu dan sistem kontrol waktu diskrit Sistem kontrol waktu kontinyu jika semua variabel sistem adalah fungsi dari waktu. Sistem kontrol waktu diskrit jika hanya melibatkan satu atau lebih variabel yang hanya diketahui pada saat waktu diskrit.1.2.5 Sistem kontrol masukan tunggal keluaran tunggal (SISO) dan banyak masukan banyak keluaran (MIMO)
sistem kontrol kecepatan, di mana sistem hanya mempunyai satu perintah masukan (kecepatan yang diinginkan) dan satu keluaran yang dikontrol (kecepatan keluaran). Contoh sistem kontrol banyak masukan banyak keluaran adalah misalnya pada sistem kontrol proses Yang mempunyai dua masukan (masukan suhu dan masukan pH) dan dua keluaran (keluaran suhu dan keluaran pH)
1.3 Operasi Penjumlahan dan Pengurangan
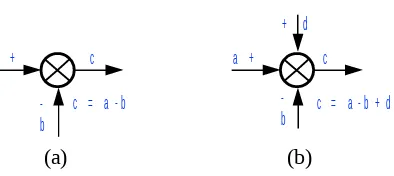
Dalam sistem kontrol, seringkali dibutuhkan operasi penjumlahan dan pengurangan dan biasanya dinyatakan oleh simbol lingkaran kecil dengan tanda panah yang menunjukkan arah proses seperti yang terlihat dalam Gambar 1.13. Dalam gambar tersebut diperlihatkan operasi penjumlahan dan pengurangan. Lambang operasi tersebut seringkali disebut sebagai titik penjumlahan (summing point). Harga variabel yang masuk ke dalam summing point sama dengan harga variabel yang keluar dari summing
point. Sebagai contoh harga c = a – b (Gambar 1.13a) dan harga c = a – b + d
(Gambar 1.13b)
P e n g e n a l a n K o n s e p S i s t e m K o n t r o l
P e n j u m l a h a n d a n P e n g u r a n g a n
D a l a m s i s t e m k o n t r o l , o p e r a s i p e n j u m l a h a n d a n p e n g u r a n g a n
s i m b o l l i n g k a r a n k e c i l d e n g a n t a n d a p a n a h y a n g m e n u n j u k k a n a r a h p r o s e s
d i m a n a a , b d a n c a d a l a h v a r i a b e l T i t i k C a b a n g
D i p e r l u k a n u n t u k m e n g e m b a l i k a n k e l u a r a n k e m a s u k a n / b a g i a n l a i n d a l a m s i s t e m
H a r g a y a n g d i k e m b a l i k a n t e t a p s a m a d e n g a n h a r g a p e n g e m b a l i a n n y a
a +
-b
c
c = a - b
a +
-b
c + d
c = a - b + d
a
z z
z
1 5
(a) (b)Gambar 1.13 Operasi Penjumlahan dan Pengurangan. a, b, c dan d merupakan Variabel.
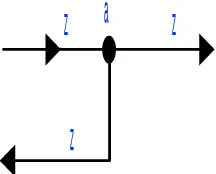
1.4 Titik Cabang
Gambar 1.14 Titik Cabang. Pada titik a terdapat tiga cabang, ketiga cabang tersebut mempunyai nilai yang sama yaitu z
1.5 Komponen Sistem Kontrol
Sesuai dengan fungsi pengontrolan secara menyeluruh, seperti terlihat dalam Gambar 1.15., maka komponen sistem kontrol dapat dibagi menjadi empat kelompok, yaitu:
Gambar 1.15 Komponen Sistem Kontrol dalam Sistem Loop Tertutup.
a.
Sensor/transduser.Sensor digunakan sebagai elemen yang langsung mengadakan kontak dengan obyek yang diukur. Transduser berfungsi untuk mengubah besaran fisis yang diukur menjadi besaran fisis lainnya. Pada umumnya mengubah besaran-besaran tekanan, temperatur, aliran, posisi dan sebagainya menjadi besaran listik.
b. Error Detector
Mengukur kesalahan (error) yang terjadi antara keluaran sesungguhnya dan keluaran yang diinginkan. Beberapa transduser ada yang dilengkapi dengan error detector.
P e n g e n a la n K o n s e p S is te m K o n tro l
P e n ju m la h a n d a n P e n g u ra n g a n
D a la m s is te m k o n tro l, o p e ra s i p e n ju m la h a n d a n p e n g u ra n g a n
s im b o l lin g k a ra n k e c il d e n g a n ta n d a p a n a h y a n g m e n u n ju k k a n a ra h p ro s e s
d im a n a a ,b d a n c a d a la h v a ria b e l
T itik C a b a n g
D ip e rlu k a n u n tu k m e n g e m b a lik a n k e lu a ra n k e
m a s u k a n /b a g ia n la in d a la m s is te m
H a rg a y a n g d ik e m b a lik a n te ta p s a m a d e n g a n
h a rg a p e n g e m b a lia n n y a
a +
-b
c
c = a -b
a +
-b
c
+ d
c = a -b + d
a
z
z
z
c. Penggerak / Power Actuator
Alat ini berfungsi untuk mengontrol aliran energi ke sistem yang dikontrol. Alat ini juga disebut dengan elemen pengontrol akhir
(final control element). Sebagai contoh adalah motor listrik, katub
pengontrol, pompa dan sebagainya. Elemen keluaran ini harus mempunyai kemampuan untuk menggerakkan beban ke suatu harga yang diinginkan.
d. Penguat / Amplifier
Power Amplifier merupakan unit yang dibutuhkan karena daya dari error detector tidak cukup kuat untuk menggerakkan elemen keluaran. Karena fungsi pengontrolan adalah untuk mengendalikan keluaran agar kesalahan mendekati nol, maka diperlukan penguat daya (power amplifier).
BAB II
MATEMATIKA SISTEM KONTROL
2.1 Transformasi LaplaceTransformasi Laplace merupakan metode operasional yang dapat digunakan secara mudah untuk menyelesaikan persamaan diferensial linier. Transformasi tersebut dapat mengubah beberapa fungsi umum seperti sinusoida, sinusoida teredam dan fungsi eksponensial menjadi fungsi aljabar kompleks.
Penggunaan Transformasi Laplace ini memungkinkan penggunaan teknik grafis untuk meramal kinerja sistem. Keuntungan lain penggunaan Transformasi Laplace adalah diperolehnya secara serentak baik komponen peralihan maupun komponen keadaan mantap (steady state) jawaban persamaan pada waktu menyelesaikan persamaan deferensial
f(t)
f(t) dtF(s) st
0
L e
dengan:
F(s) = Transformasi Laplace dari f(t).
f(t) = fungsi waktu t sedemikian rupa sehingga f(t) 0 untuk t<0
s = variabel kompleks (s = j).
f(t)L -1
F(s)
= simbol operasional yangmenunjukkan bahwa besaran
setelah simbol tersebut ditransformasi dengan integral Laplace F(s)
f(t)
f(t) stdt0
L e .
Sebagai contoh pemakaian Transformasi Laplace akan diberikan fungsi-fungsi yang sering dipakai dalam sistem kontrol, yaitu:
a)
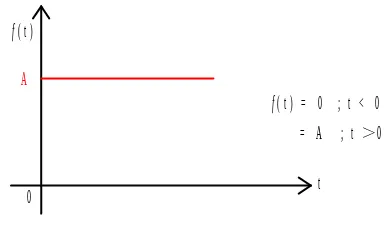
Fungsi tangga (step)Misalkan dalam Gambar 2.1 dapat dilihat suatu fungsi tangga/step dengan
0 untuk t
0
f(t)
0 untuk t A
c o n t o h :
a . T r a n s f o r m a s i L a p l a c e f u n g s i t a n g g a ( s t e p )
f( t ) = 0 u n t u k t < 0 = A u n t u k t 0
F ( s ) =
f
( t )
e
- s td t
h
0
x
A
e
- s td t
h
0
x
=
=
A
s
f( t ) = 0 ; t < 0 = A ; t 0 f( t )
t 0
A
s = + j w
Gambar 2.1 Fungsi Tangga (Step).
Transformasi Laplace fungsi tersebut dapat dicari dengan menggunakan persamaan Transformasi Laplace sebagai berikut:
s A
dt st A
dt st f(t) F(s)
0 0
e e
Jika pada fungsi tersebut, nilai A = 1, maka fungsi tersebut dikenal dengan istilah fungsi unit step/fungsi tangga satuan.
b) Fungsi sinusoida
Dalam Gambar 2.2 dapat dilihat suatu fungsi sinusoida, dimana
At Sin
f(t) .
Gambar 2.2 Fungsi Sinusoida.
c o n t o h :
c) Fungsi pulsa
Dalam Gambar 2.3 dapat dilihat suatu fungsi pulsa, sebagai contoh adalah f(t) = h ; 0 < t < t0
= 0 ; t >t0
Gambar 2.3 Fungsi Pulsa.
Transformasi Laplace fungsi tersebut dapat dicari dengan menggunakan persamaan Transformasi Laplace sebagai berikut:
st0
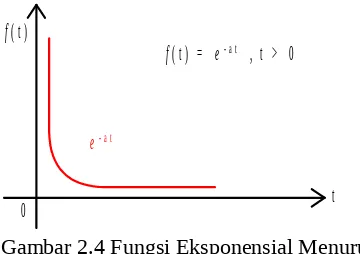
d) Fungsi eksponensial menurun
f( t ) = e- a t , t > 0
f( t )
t 0
e- a t
f( t ) = k t , t > 0 f( t )
Gambar 2.4 Fungsi Eksponensial Menurun.
Transformasi Laplace fungsi tersebut dapat dicari dengan menggunakan persamaan Transformasi Laplace sebagai berikut:
a s
1
dt s)t a (
dt st at
dt st f(t) F(s)
0 0 0
e e e
e
e)
Fungsi tanjak (ramp)Gambar 2.5 Fungsi Tanjak/ramp.
Transformasi Laplace fungsi tersebut dapat dicari dengan menggunakan persamaan Transformasi Laplace sebagai berikut:
2 0
0
s 1
dt st t
dt st f(t) F(s)
e e
Jika nilai k = 1, maka fungsi fungsi tersebut umumnya disebut dengan fungsi
unit ramp.
2.2 Teorema Transformasi Laplace a) Linearitas
k f(t)
kL
f(t)
k F(s)L
b) Superposisi
f
(t)
f
(t)
(s)
F
(s)
F
(t)
f
(t)
f
2 1
2 1
2 1
L
L
L
c) Translasi waktu
Jika F(s) merupakan Transformasi Laplace dari f(t), a merupakan bilangan positif nyata dimana berlaku f(t a) 0 untuk 0ta, maka:
f(t-a)
easF(s)L
Bukti:
0 0 0
dt as st a) f(t
dt a) -s(t a) f(t
dt sτ ) f( F(s)
e e e e
F(s) as
dt st a) f(t as
0
e
e e
Contoh:
Pada fungsi tangga/step seperti terlihat dalam Gambar 2.6, dimana
0 t ; A
0 t ; 0 f(t)
f( t )
t 0
A
Gambar 2.6 Fungsi Tangga/Step.
Transformasi Laplace fungsi tangga tersebut adalah
s A F(s)
sedangkan bila fungsi tersebut bertranslasi waktu sebesar a, seperti
terlihat dalam Gambar 2.7 maka persamaan fungsinya adalah sebagai
berikut
f(t a)A, dimana
Gambar 2.7 Fungsi Tangga/Step yang Bertranslasi Waktu
Sebesar a.
Nilai F(s) fungsi tersebut sesuai dengan teorema Transformasi Laplace
merupakan translasi waktu adalah
as
s A F(s) e
d) Diferensial dalam bentuk kompleks
F(s)ds d f(t)
t L
Contoh
2 at at
a s
1
a s
1 ds
d
ds d t
e
e
L
e) Translasi dalam wawasan s
Jika F(s) merupakan Tranformasi Laplace dari f(t) dan a merupakan bilangan nyata atau kompleks, maka
eat f(t)
F(s a),
f) Diferensiasi (tranformasi fungsi turunan)
f(0)
sedangkan Transformasi Laplace turunan ke-n adalah sebagai berikut
f(0)
f(0)dt merupakan harga awal integralf(0)merupakan harga f(t) untuk t0
h) Nilai akhir
i) Nilai awal
Memberikan harga f(t)pada keadaan awal atau t 0, yaitu
sF(s) lim f(t) lim
s 0
t
CONTOH SOAL:
Tentukan Tranformasi Laplace fungsi-fungsi berikut ini:T e n t u k a n T r a n s f o r m a s i L a p l a c e f u n g s i - f u n g s i :
F ( s ) = [
f
( t )
] =
f
( t )
e
- s td t
h
0 x
f( t ) = 0 , t < t0 = 1 , t t0
f( t )
t
0 t0
1
f( t ) = 1 , 0 < t < A = 0 , t > A
f( t )
t
0 A
1
f( t ) = t , 0 < t 1 = - t + 2 , 1 < t < 2
f( t )
t
0 1
1
2
( 1 ) ( 2 ) ( 3 )
f(t)
f(t) dtF(s) st
0
L e
Penyelesaian nomor (1)
S o l u s i s o a l n o 1 :
F ( s ) =
0
e
- s td t +
t 0
0
x
1
e
- s td t
x
h
t 0
=
x
e
- s td t
h
t0
=
1
s
e
- s tr
h
t0
= s
e
- s t0= -
1
s
( 0 -
e
- s t0)
= s
1
e
- s t0f
( t ) = 0 , t < t
0= 1 , t t
0 f( t )t
0 t0
0
Penyelesaian nomor (2) T e n t u k a n T r a n s f o r m a s i L a p l a c e f u n g s i - f u n g s i :
Dalam menentukan nilai F(s) dari nilai f(t) kita dapat menentukannya dengan menggunakan tabel Transformasi Laplace seperti terlihat dalam tabel 2.1 berikut.
Tabel 2.1 Tabel Transformasi Laplace
14.
2.3 Invers Transformasi Laplace/Transformasi Laplace Balik
Transformasi Laplace balik merupakan proses matematik untuk
Dalam menyelesaikan permasalahan dengan metode transformasi Laplace, yang berarti mendapatkan f(t) dari F(s). Secara matematik, f(t) diperoleh dari F(s) dengan integrasi berikut:
0)
dengan c, suatu absis konvergensi konstanta real dan dipilih lebih besar dari bagian real dari semua titik singular F(s). Artinya lintasan paralel sumbu
jωdan berjarak sejauh c. Lintasan integral ini berada di sebelah kanan
semua titik singular.
Metode yang lebih sederhana untuk menentukan invers Transformasi Laplace dari F(s) ke dalam bentuk fungsi waktu f(t) adalah dengan menggunakan tabel Transformasi Laplace. Dalam hal ini, Transformasi Laplace harus dibawa ke dalam bentuk yang ada dalam Tabel Transformasi Laplace. Seringkali suatu fungsi yang harus diselesaikan tidak terdapat dalam tabel, jika hal ini terjadi maka kita harus mengekspansinya dan menulis F(s) dalam bentuk yang sederhana sehingga dapat dilakukan Transformasi Laplace.
Contoh:
Tentukan Transformasi Laplace balik dari
)
)
dengan a1 dan a2 adalah sebagai berikut
1 2.4 Pemakaian Transformasi Laplace
Transformasi Laplace dapat digunakan dengan mudah untuk menyelesaikan suatu persamaan diferensial. Adapun langkah-langkah dalam menyelesaikan persamaan differensial dengan menggunakan Transformasi Laplace adalah sebagai berikut:
a)
Menuliskan persamaan diferensial sistem yang akan dianalisis.b)
Menuliskan Transformasi Laplace dari persamaan diferensialtersebut.
c)
Menentukan Transformasi Laplace dari tiap suku dalam persamaan diferensial tersebut.Syarat-syarat permulaan (kondisi awal) harus diberikan.
d)
Menyatakan bentuk transformasi dalam daerah (fungsi) s.e)
Jika diinginkan dalam daerah (fungsi) t dapat digunakan tabel Transformasi Laplace.Contoh 1:
c o n t o h :
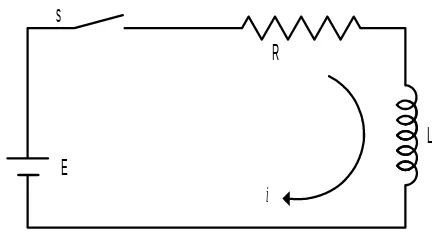
Gambar 2.6 Rangkaian RL Seri. Penyelesaian:
Setelah sakelar s ditutup (t0), maka persamaan untuk arus adalah
e(t) dt
di(t) L
Ri(t)
dan dengan mentransformasikan tiap suku dalam persamaan ini ke daerah s akan diperoleh :
kemudian masukkan syarat awal i(0) = 0, maka
Jika diinginkan nilai arus sebagai fungsi waktu, kita dapat menggunakan tabel Transformasi Laplace, dimana bentuk I(s) merupakan bentuk yang
Invers Transformasi Laplace bentuk s(sAa)adalah (1 ) a
A at
)
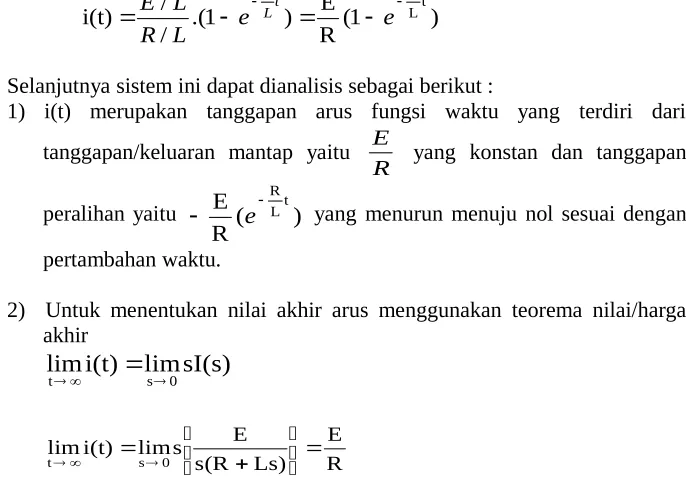
Selanjutnya sistem ini dapat dianalisis sebagai berikut :
1) i(t) merupakan tanggapan arus fungsi waktu yang terdiri dari tanggapan/keluaran mantap yaitu
R
e yang menurun menuju nol sesuai dengan pertambahan waktu.
2) Untuk menentukan nilai akhir arus menggunakan teorema nilai/harga akhir
3) Nilai awal ditentukan dengan menggunakan teorema nilai/harga awal
E = 0 v
Gambar 2.7 Rangkaian RLC Seri.
Mula-mula kapasitor C mempunyai potensial sebesar 1 Volt. Tentukan bentuk arus sebagai fungsi dari t (dimana v0 1V). Penyelesaian:
Jika diinginkan nilai arus sebagai fungsi waktu, kita dapat memperolehnya dengan cara menggunakan tabel Transformasi Laplace, sehingga didapatkan:
BAB III
PEMODELAN
3.1 Fungsi AlihDalam teori sistem kontrol, fungsi alih digunakan untuk mencirikan hubungan masukan dan keluaran dari komponen/sistem yang dapat digambarkan dengan persamaan diferensial linier, invarian waktu. Fungsi alih persamaan diferensial, invarian waktu suatu sistem didefinisikan sebagai perbandingan antara Transformasi Laplace keluaran terhadap Transformasi Laplace masukan dengan anggapan semua syarat awal nol.
dinyatakan dengan persamaan aljabar dalam s. Jika pangkat tertinggi s dalam penyebut fungsi alih sama dengan n, maka sistem disebut sistem orde ke-n. Beberapa Hal mengenai Fungsi AlihKegunaan konsep fungsi alih terbatas pada sistem linear persamaan diferensial, waktu tidak berubah. Namun pendekatan fungsi alih digunakan secara meluas dalam analisis dan desain sistem. Beberapa hal yang penting dalam fungsi alih adalah sebagai berikut:
Fungsi alih sistem adalah model matematika yang merupakan metode operasional dari pernyataan persamaan diferensial yang menghubungkan variabel keluaran dengan masukan.
Fungsi alih sistem adalah sifat sistem tersebut sendiri, tidak tergantung dari besaran dan sifat masukan.
Fungsi alih tidak memberikan informasi mengenai struktur fisik sistem tersebut, atau atau dapat dikatakan fungsi alih sistem yang secara fisik berbeda dapat identik.
Jika fungsi alih sistem tidak diketahui, dapat diadakan secara percobaan dengan menggunakan masukan yang diketahui dan menelaah keluaran sistem
3.2Model Matematika Sistem Dinamik
Pemodelan merupakan pembuatan model matematika sistem dinamik. Model matematika sistem dinamik didefinisikan sebagai sejumlah persamaan yang menggambarkan dinamika sistem secara tepat, paling tidak cukup baik. Sebuah sistem dapat digambarkan dalam banyak cara yang berbeda sehingga mungkin mempunyai banyak model matematika.
Satu model matematika mungkin lebih cocok daripada model matematika yang lain, misalnya :
Gambaran tempat kedudukan (state space) mungkin cocok untuk mengerjakan sistem dengan banyak masukan dan banyak keluaran (MIMO).
Analisis tanggapan transien atau tanggapan frekuensi SISO linear, waktu tidak berubah sehingga gambaran fungsi alih lebih baik dan mudah.
Dinamika sistem mekanik, listrik, panas, ekonomi dan sebagainya mungkin dijelaskan dalam bentuk persamaan diferensial. Persamaan diferensial tersebut dapat diperoleh dengan menggunakan hukum fisika yang mengendalikan sistem tertentu, misalnya Hukum Newton untuk sistem mekanika dan Hukum Kirchoff untuk sistem listrik.
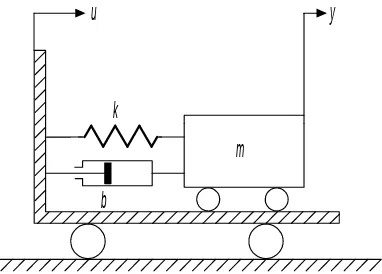
Berikut diberikan contoh pemodelan pada sistem mekanika. Hukum dasar yang mengatur sistem mekanika adalah hukum kedua Newton yang dapat diterapkan pada sistem mekanika apapun.
Sistem translasi mekanika.
Misalnya pada sistem dashpot-massa-pegas
s i s t e m d a s h p o t m a s s a p e g a s y a n g d i p a s a n g p a d a k e r e t a
- S i s t e m t r a n s l a s i m e k a n i k a
H u k u m d a s a r : H u k u m I I N e w t o n
M o d e l m a t e m a t i s
S i s t e m m e k a n i k a
u y
k
m
b
Dianggap pada t < 0 kereta dalam keadaan diam, u(t) merupakan perpindahan kereta (masukan sistem).
Pada t = 0 kereta digerakkan dengan kecepatan tetap (
u tetap)
Perpindahan y(t) dari massa adalah keluaran (perpindahan adalah relatif terhadap tanah), dimana:
m = massa
b = koefisien gesekan liat /redaman / damping k = konstanta pegas
dianggap gaya gesekan dash pot sebanding dengan y u dan pegas
adalah pegas linier, yaitu gaya pegas sebanding dengan y – u. Untuk sistem translasi, hukum Newton II menyatakan bahwa:
F
ma
m = massa, kg a = percepatan, m/dt2
F = gaya, N
persamaan tersebut merupakan model matematika sistem. Model Fungsi Alih
Model fungsi alih merupakan salah satu cara untuk memberikan gambaran model matematika sistem linier, waktu tidak berubah (time invariant). Untuk mendapatkan fungsi alih sistem dengan model matematika berikut model matematika tersebut, sehingga didapat:
ku k U(s)u(0) U(s) s b dt du b
L L
jika ditetapkan keadaan awal adalah 0, maka y(0) = 0, y (0) = 0, dan u(0) =
0, sehingga Transformasi Laplacenya adalah sebagai berikut:
U(s) k) (bs k)Y(s) bs
(ms2
Sehingga didapatkan fungsi alihnya, yaitu:
k bs ms
k bs U(s)
Y(s) G(s)
alih
Fungsi 2
Sistem rotasi mekanika
Misalnya pada sistem
yang terdiri dari inersia beban dan
peredaran gesekan liat dalam Gambar 3.2.
Hukum Newton II menyatakan bahwa:
J
α Jd
ττ ω b ω
J
Jωbωτ
dimana:
J = momen inersia beban, kg-m2
α = percepatan sudut beban, rad/dt2
τ = torsi yang diterapkan ke sistem, N-m b = koefisien gesekan liat, Nm/rad/dt ω = kecepatan sudut, rad/dt
Gambar 3.2 Sistem Rotasi Mekanika.
awal nol dan menulis rasio keluaran (kecepatan sudut ω) dengan masukan (torsi T) yang ditetapkan sebagai berikut:
Js b,1 s
T s Ω
Ω
s L
ω
t
, T
s L
t
Sistem listrik
Misalnya pada rangkaian RLC seri dalam Gambar 3.3 bisa
didapatkan model matematika dan model fungsi alihnya.
L R
C
ei e0
i
Gambar 3.3 Rangkaian RLC seri.
Model matematika rangkaian RLC seri dalam Gambar 3.3 adalah sebagai berikut:
idt i
C 1 Ri dt di
L e
0
dt i C
1
e
Model fungsi alihnya dapat kita dapatkan dengan mentransformasi Laplace model matematika tersebut yang merupakan persamaan diferensial dan dengan menganggap syarat awal nol, diperoleh :
(s) E (s) I Cs
1 (s) I R I(s) s
L i
(s) E (s) I Cs
1
0
Jika ei dianggap sebagai masukan dan e0 sebagai keluaran, maka fungsi
alih sistem adalah
1 RCs LCs
1 (s)
E (s) E
2 i
0
R
C
v1 v3
i1
i2 i3
v2
Gambar 3.4 Penguat pembalik (inverting amplifier).
Penguat pembalik dalam Gambar 3.4 mempunyai model
matematika dan model fungsi alih sebagai berikut:
2 0 2
1 1 1
R
e
e'
i
,
R
e'
e
i
i
1=i
2, e
’=0
2 0 1
1
R e e' R
e'
e
1 2 0
1 2 0
R R e
e
e R R e
i
i
Rangkaian RC seri
v
1: masukan
v
3: keluaran
Model matematisnya rangkaian RC seri dalam Gambar 3.5 adalah
Model fungsi alihnya bisa didapat dari fungsi alih diagram baloknya yaitu:
1
Model fungsi alih bila dicari dengan menggunakan hukum Kirchhof :
R C
Rangkaian RC paralel
i1 : masukan
v3 : keluaran
Gambar 3.6 Rangkaian RC paralel.
Model matematis rangkaian RC paralel Gambar 3.6 adalah sebagai berikut:
2
Model fungsi alihnya :
1
3.3 Sistem linier
1) Pada sistem tersebut mempunyai persamaan diferensial linier (jika koefisiennya konstanta atau hanya merupakan fungsi variabel bebasnya). 2) Berlaku prinsip super posisi (tanggapan terhadap beberapa masukan dapat dihitung dengan mengerjakan masukan satu persatu dan menjumlahkan hasilnya).
S L
r ( t )
c ( t )
Gambar 3.7 Sistem Linier (SL) dengan r(t) sebagai Masukan dan c(t) sebagai Keluaran.
Pada sistem linier dalam Gambar 3.7, jika sistem diberi masukan r1(t), maka akan memberikan keluaran c1(t). Apabila sistem diberi masukan
r2(t) maka akan memberikan keluaran c2(t). Pada sistem linier, jika pada
sistem diberikan masukan r1(t) + r2(t) maka akan memberikan keluaran
sebesar c1(t) + c2(t).
Sebagai contoh persamaan pada sistem linier adalah sebagai berikut: misalnya pada suatu sistem yang mempunyai persamaany2x, dengan x sebagai variabel masukan dan y sebagai variabel keluaran. Apabila sistem diberi masukan x1(t)=1, maka akan menghasilkan keluaran y1(t)=2. Apabila
sistem diberi masukan x2(t)=4, maka akan menghasilkan keluaran y2(t)=8.
Apabila sistem diberi masukan x1(t)x2(t)=1+4=5, maka akan menghasilkan keluaran y1(t)y2(t)=2+8=10.
8 (t) y 4 (t) x
2 (t) y 1 (t) x
2 2
1 1
(t) y (t) y (t) x (t)
x1 2 1 2
5 (t) x (t)
x1 2
(linier)
Sebagai contoh persamaan pada sistem tak linier adalah sebagai berikut:
misalnya pada suatu sistem yang mempunyai persamaan yx2, dengan x
sebagai variabel masukan dan y sebagai variabel keluaran. Apabila sistem diberi masukan x1(t)=1, maka akan menghasilkan keluaran y1(t)=1. Apabila
Apabila sistem diberi masukan x1(t)x2(t)=1+4=5, maka akan menghasilkan keluaran y1(t)y2(t)=1+16=17, sehingga sistem yang mempunyai persamaan yx2merupakan sistem tak linier.
16 (t) y 4 (t) x
1 (t) y 1 (t) x
2 2
1 1
(t) y (t) y (t) x (t)
x1 2 1 2
5 (t) x (t)
x1 2
(tak linier)
Persamaan pada sistem yang juga merupakan sistem tak linier adalah:
sin x,
y zx2y2
3.4 Diagram balok
Seperti kita ketahui, suatu sistem kontrol dapat terdiri dari beberapa komponen. Untuk menunjukkan fungsi yang dilakukan oleh tiap komponen, dalam sistem kontrol biasanya digunakan suatu diagram yang biasa disebut diagram balok. Diagram balok suatu sistem adalah suatu penyajian bergambar dari fungsi yang dilakukan oleh tiap komponen dan aliran sinyalnya. Diagram balok mengandung informasi perilaku dinamik, tetapi tidak mengandung informasi mengenai konstruksi fisik sistem.
Dalam suatu diagram balok, semua variabel sistem saling dihubungkan dengan menggunakan balok fungsional, yang merupakan suatu simbol operasi matematik pada sinyal masukan balok yang menghasilkan keluaran. Fungsi alih komponen biasanya ditulis di dalam balok, yang dihubungkan dengan anak panah untuk menunjukkan arah aliran sinyal.
Fungsi alih sistem kaskade seperti terlihat dalam Gambar 3.8 adalah sebagai berikut
E1(s) E2(s) E3(s) E4(s) E5(s)
G 1(s) G 2(s) G 3(s) G 4(s)
(s)
dimana E1 merupakan masukan sistem dan E5 merupakan keluaran sistem.
Fungsi alih sistem yang berumpan balik negatif seperti terlihat dalam Gambar 3.9 adalah sebagai berikut
E(s)
Gambar 3.9 Sistem Berumpan Balik Negatif.
C(s)
Gambar 3.10 Penyederhanaan Diagram Balok Sistem Berumpan Balik Negatif.
Jika sistem berumpan balik positif, maka diagram baloknya seperti terlihat dalam Gambar 3.11.
G (s) C (s)
R (s)
1 - G (s)H (s)
Gambar 3.11 Penyederhanaan Diagram Balok Sistem Berumpan Balik Positif.
Penyederhanaan diagram balok
Suatu diagram balok yang terdiri dari beberapa loop umpan balik dapat disederhanakan dengan cara menyusun kembali langkah demi langkah menggunakan aturan aljabar diagram balok. Beberapa aturan aljabar diagram balok dapat dilihat dalam Tabel 3.1 yang diperoleh dengan menulis persamaan yang sama dengan cara yang berbeda.
Tabel 3.1 Aturan Aljabar Diagram Balok
Diagram Balok Asal Diagram Balok Ekivalen
e1
e1
e2
G e1
e1
e2
G
1 / G e1
e2
e2
G e1
e2
e2
G
G
e3
+
-e1 e2
G e1 G e2
e1 e2
G
e3 1 / G
e3
+
-e1 e2
G
H +
-R C
G
Penyederhanaan diagram balok dengan penyusunan kembali dan substitusi memungkinkan untuk memudahkan analisis matematik. Dalam menyederhanakan suatu diagram balok maka fungsi alih dalam diagram balok yang baru menjadi lebih kompleks karena adanya penambahan pole-pole baru dan zero baru terbentuk.
Dalam menyederhanakan suatu diagram balok perlu diperhatikan beberapa hal sebagai berikut:
(1) Hasil fungsi alih dalam arah jalur maju harus tetap sama. (2) Hasil fungsi alih sekitar loop harus tetap sama.
3.5
Signal Flow Graph (Grafik Aliran Sinyal)Manipulasi diagram balok umumnya digunakan untuk menentukan fungsi alih suatu sistem yang sederhana, sedangkan untuk sistem yang lebih rumit digunakan grafik aliran sinyal.
Grafik aliran sinyal merupakan suatu diagram yang mewakili seperangkat persamaan aljabar linear. Grafik aliran sinyal berisi kerangka kerja dengan suatu simpul yang dihubungkan secara langsung dengan cabang. Tiap simpul menyatakan variabel sistem dan tiap cabang yang dihubungkan antara dua simpul berfungsi sebagai penguat sinyal. Arah aliran sinyal hanya dalam satu arah yang ditunjukkan dengan tanda panah yang berada pada cabang dan faktor pengali ditunjukkan sepanjang cabang.
3 . 1 F u n g s i A l i h S i s t e m
2 . S i g n a l F l o w G r a p h
z
=
a b
x
x
z
a b
y
=
a
x
z
=
b y = a b
x
P e n y e d e r h a n a a n d i a g r a m a l i r a n k o m p l e k s a . J a l u r b e r d e r e t ( s i m p u l b e r t i n g k a t )
x
z
a
b
y
3 . 1 F u n g s i A l i h S i s t e m
2 . S i g n a l F l o w G r a p h d i a g r a m a l i r a n s i n y a l b l o k d i a g r a m s i s t e m k o n t r o l s e d e r h a n a
d i a g r a m a l i r a n s i s t e m k o n t r o l y a n g l e b i h k o m p l e k s
b e r b e n t u k s u a t u j a r i n g a n (n e t w o r k) - s i m p u l (n o d e ) v a r i a b e l - p e r c a b a n g a n (b r a n c h) p r o s e s ( g a r i s ) y a n g m e n g h u b u n g k a n d u a b u a h v a r i a b e l
a , b , c = p e r c a b a n g a n
x
1 ,x
2 ,x
3 ,x
4= s i m p u l
x1 x2 x3
x4
a b
c
Gambar 3.11 Grafik Aliran Sinyal.
Simpul berfungsi sebagai titik penjumlahan dan sebagai titik permulaan atau titik tujuan. Hal tersebut dapat dilihat dalam Gambar 3.12.
3 . 1 F u n g s i A l i h S i s t e m
2 .
S i g n a l F l o w G r a p h
x
2=
a
x
1x1 x2
a
x1
x2
a
b
c
d
x3
x4
x5
x
3=
a
x
1+
b
x
2x
4=
c
x
3x
5=
d
x
3x1
x2
a b c
d
x3
x4 x5
x
4=
a
x
1+
b
x
2+
c
x
3x
5=
d
x
4Gambar 3.12 Fungsi Simpul sebagai Titik Permulaan, Tujuan, dan Penjumlahan
Penyederhanaan grafik aliran kompleks
Pada grafik aliran sinyal yang kompleks bisa dilakukan penyederhanaan diantaranya adalah sebagai berikut
a. Jalur berderet (simpul bertingkat)
3 . 1 F u n g s i A l i h S i s t e m
2 . S i g n a l F l o w G r a p h
z
=
a b
x
x
z
a b
y
=
a
x
z
=
b y = a b
x
P e n y e d e r h a n a a n d i a g r a m a l i r a n k o m p l e k s a . J a l u r b e r d e r e t ( s i m p u l b e r t i n g k a t )
x
z
a
b
y
c. Absorbsi simpul
3 . 1 F u n g s i A l i h S i s t e m
2 . S i g n a l F l o w G r a p h
z
=
a c x + b c y
z
=
a c
x
+
b c y
c . A b s o r b s i s i m p u l
x
a
b
y
c
z
x
a c
b c
y
z
d. Eliminasi loop
3 . 1 F u n g s i A l i h S i s t e m
2 . S i g n a l F l o w G r a p h
z
=
b ( a x + c z )
c . E l i m i n a s i l o o px
z
a b
1 - b c
z
=
b y
x
z
a
b
y
c
y
=
a
x
+
c z
z
=
a b x + b c z
x
z
a b
b c
z
=
a b
x
1 - b c
Tabel 3.2 Diagram Balok dan Grafik Aliran Sinyal Ekivalennya
G 1 1( s )
R1( s )
+
+ R2( s )
G 2 1( s )
G 1 2( s )
G 2 2( s )
+
C 1( s )
C 2( s )
+
G 1 1( s )
R 1( s )
R2( s )
G 2 1( s )
G 1 2( s )
G 2 2( s )
C 1( s )
C2( s )
Grafik aliran sinyal memberikan informasi yang sama dengan diagram balok. Penggunaan grafik aliran sinyal untuk menyajikan suatu sistem kontrol, digunakan rumus/cara Mason untuk memperoleh hubungan antara variabel sistem tanpa harus menyederhanakan grafik. Cara Mason digunakan untuk menentukan fungsi alih sistem pada grafik aliran sinyal. Cara Mason diformulasikan sebagai berikut
Δ Δ P =
T n
n n
dimana:
T : fungsi alih sistem Pn : lintasan maju
: 1 L1L2 L3 ...
1
mLm ΣL1: loop-loop umpan balikL2 : perkalian 2 buah loop yang saling tidak menyentuh
L3 : perkalian 3 buah loop yang saling tidak menyentuh
n : sama dengan nilai
, tetapi loop yang tidak menyentuh Pn: 1 jumlah loopyang tidak menyentuh Pn
Contoh menentukan fungsi alih sistem dari grafik aliran sinyal adalah sebagai berikut
1 . a b c
1 1
1 1
bd abc P
sehingga fungsi alihnya adalah:
bd abc T
1
2 .
a
b
c
d
e
f
g
bcdf cg abcde P
1
1
1
1
sehingga fungsi alihnya adalah :
bcdf cg
abcde T
1
3 . a b c d e f
g
h
i
j
P1 = a b c d e f
P2 = a g d e f
P3 = a g j f
P4 = a b c j f
= 1 1
= 1 - i 2
= 1 - i 3
= 1 4
= 1 - ( i + c d h )
T = a b c d e f + a g d e f ( 1 - i ) + a g j f ( 1 - i ) + a b c j f
1 - ( i + c d h )
bidjfk djfk)
bifk (bidj bcdefgl) fk
dj (bi 1
abcdefgh T
bidjfk djfk)
bifk (bidj bcdefgl)
fk dj (bi 1 Δ
1 Δ abcdefgh
P1 1
Contoh:
Tentukan fungsi alih sistem di bawah dengan menggunakan metode penyelesaian
1) Manipulasi diagram balok
2)
Signal flow graph (grafik aliran sinyal)G1 G 2 G 3 G 4
H 1
H 3
H 2
C(s)
R ( s )
+
- +
-+ +
? C (s)
R( s )
Penyelesaian
1) Mencari fungsi alih dengan menggunakan manipulasi diagram balok
G 1 G2 G3 G 4
H 1
H 3
H2
C(s)
R( s )
+
- +
-+ +
G 1 G 2 G 3G 4
H 1
H 3
H 2 /G 4
C (s) R( s )
+
- +
sehingga fungsi alih sistem tersebut adalah
3
1
P G1G2 G3G4
1
1
1 (G2G3H2 G3G4 H1 G1G2 G3G4 H3)
1G2G3H2 G3G4H1G1G2G3G4H3sehingga fungsi alihnya adalah:
T
P1Δ1
3 4 3 2 1 1 4 3 2 3 2
4 3 2 1
H G G G G H G G H G G 1
G G G G
BAB IV
KRITERIA PERFORMANSI
4.1 Spesifikasi Performansi.
Sistem kontrol dirancang untuk menyelesaikan suatu pekerjaan tertentu. Biasanya spesifikasi performansi tidak boleh lebih tinggi dari yang dibutuhkan untuk melakukan suatu pekerjaan yang diinginkan. Jika ketelitian pada operasi keadaan mantap dari sistem kontrol yang diinginkan menempati urutan yang pertama, maka kita tidak boleh menginginkan spesifikasi performansi yang tinggi tetapi tidak begitu diperlukan pada respon transien, karena spesifikasi tersebut akan memerlukan komponen yang mahal.
Syarat-syarat yang harus dipenuhi sistem kontrol umumnya disebut dengan spesifikasi performansi. Hal tersebut berkaitan dengan kestabilan, ketelitian, kepekaan, kesalahan keadaan mantap dan spesifikasi respon transien.
stabilitas (kestabilan) sensitivitas (kepekaan) akurasi (ketelitian)
transient response (tanggapan peralihan)
4.2 Stabilitas/kestabilan
Sistem loop tertutup seharusnya stabil bahkan ketika sistem diberikan sinyal perintah, diberikan input tambahan di berbagai tempat dalam loop, diberikan power supply yang bervariasi, dan adanya perubahan parameter-parameter dalam loop umpan balik
Sistem tidak stabil
Sebuah sistem dikatakan tidak stabil jika responnya terhadap suatu masukan menghasilkan osilasi yang keras atau bergetar pada suatu amplitudo/ harga tertentu.
Sistem stabil
Sebuah sistem dikatakan stabil jika sistem tersebut akan tetap dalam keadaan diam/ berhenti kecuali jika dirangsang oleh suatu fungsi masukan, dan akan kembali dalam keadaan diam jika rangsangan tersebut dihilangkan. Ketidakstabilan merupakan hal yang tidak menguntungkan bagi suatu sistem loop tertutup, sedangkan pada sistem loop terbuka sistem harus stabil.
Masukan sistem tidak mempengaruhi kestabilan suatu sistem, sehingga jika sistem tersebut stabil terhadap suatu masukan maka dia akan stabil untuk masukan yang ada, sebaliknya stabilitas hanya bergantung pada karakteristik sistem itu sendiri.
Respon suatu sistem yang stabil dapat dikenali dari adanya peralihan yang menurun menuju nol terhadap pertambahan waktu, sehingga sistem yang stabil koefisien suku eksponensial yang terdapat dalam respon transiennya harus merupakan bilangan-bilangan nyata yang negatif atau bilangan kompleks dimana bagian nyatanya harus negatif.
i ( A ) 1
1
0 t ( d t )
Gambar 4.1 Respon Peralihan Sistem Stabil.
Pendekatan untuk menentukan kestabilan sistem yaitu setelah mengubah persamaan sistem ke dalam fungsi s melalui Transformasi Laplace. Kestabilan tersebut didapatkan diantaranya adalah dengan menggunakan persamaan karakteristik, menggunakan kriteria Routh -Hurwitz, analisis tempat kedudukan akar-akar persamaan karakteristik (root locus), atau dengan menggunakan kriteria Nyquist.
4.2.1 Persamaan Karakteristik
Stabilitas sistem umpan balik secara umum didapat dari fungsi alih sistem, dimana fungsi alih sistem secara umum adalah
C ( s ) R ( s )
G ( s ) 1 + G ( s ) H ( s )
=
dimana R(s) merupakan masukan sistem, C(s) merupakan keluaran sistem, G(s) merupakan penguatan sistem, dan H(s) merupakan umpan balik sistem seperti terlihat dalam Gambar 4.2. Dengan membuat penyebut fungsi alih sistem yaitu 1 + G(s)H(s) = 0, yang merupakan persamaan karakteristik sistem dan dapat memberikan informasi mengenai kestabilan sistem.
C ( s ) R ( s )
G ( s ) 1 + G ( s ) H ( s )
=
1 + G ( s ) + H ( s ) = 0
s e h i n g g a G ( s ) H ( s ) = N ( s )
D ( s ) 1 + G ( s ) + H ( s ) = 1 + = = 0 N ( s )
D ( s )
D ( s ) + N ( s ) D ( s ) D ( s ) + N ( s ) = 0 = ( s + r1) ( s + r2) . . . . ( s + rn)
G ( s )
H ( s )
R ( s ) +
-C ( s )
Gambar 4.2 Diagram Balok Sistem dengan Jalur Maju G(s) dan Umpan Balik H(s).
C ( s ) R ( s )
G ( s ) 1 + G ( s ) H ( s )
)
-r1, -r2 merupakan akar-akar persamaan karakteristik.
Sistem tersebut akan stabil jika semua bagian nyata akar-akar tersebut negatif
contoh :
Tentukan apakah sistem merupakan sistem yang stabil/tidak pada sistem di bawah ini
persamaan karakteristiknya :
0 karakteristiknya harus negatif.
Karena r1 dan r2 negatif maka sistem tersebut merupakan sistem yang
stabil.
2. Jika loop tertutup dengan
1
1 + = 0 s ( 0 . 0 1 s + 1 ) ( 0 . 0 2 s + 1 ) + 2 1 1 = 0 0 . 0 0 2 s3 + 0 . 0 3 s2 + s + 2 1 1 = 0
s3 + 1 5 0 s2 + 5 0 0 0 s + 1 , 0 5 6 . 1 0 6 = 0
( s + 1 6 0 ) ( s - 5 - 8 1 j ) ( s - 5 + 8 1 j ) = 0 2 1 1
s ( 0 . 0 1 s + 1 ) ( 0 . 0 2 s + 1 ) 1 + G ( s ) + H ( s ) = 0
Akar-akarnya adalah r1,= -160; r2 = 5 + j 81; r3 = 5 -j 81
Karena r2 dan r3 bagian nyatanya positif maka sistem merupakan sistem
yang tidak stabil.
4.2.2 Kriteria Routh - Hurwitz Bentuk umum persamaan karakteristik :
B
1s
m+ B
2s
m - 1+ B
3s
m - 2+ . . . . + B
m + 1= 0
Koefisien persamaannya disusun dalam 2 baris
s
mB
1B
3B
5B
7. . .
s
m - 1B
2
B
4B
6B
8. . .
Semua koefisien diasumsikan bernilai real dan positif. Penambahan baris-baris koefisien selanjutnya adalah sebagai berikut :
s
mB
1B
3B
5B
7. . .
s
m - 1B
2B
4B
6B
8. . .
s
m - 2U
1U
3U
5U
7. . .
s
m - 3U
2U
4U
6U
8. . .
s
m - 4V
1V
3V
5V
7. . .
s
m - 5V
2V
4V
6V
8. . .
. . . . .
. . . . .
. . . . .
s
0Z
1dimana:
U 1 = B 2B 3 - B 1B 4
B 2
U 2 = U 1B 4 - B 2U 3
U 1
U 3 = B 2B 5 - B 1B 6
B 2
U 4 = U 1B 6 - B 2U 5
U 1
Pada kriteria kestabilan dengan menggunakan Routh Hurwitz, baris pertama tabulasi adalah sm dan baris terakhirnya adalah s0. Jumlah baris adalah
sebanyak m +1 (dimana m adalah orde persamaan karakteristik) Kriteria kestabilan Routh Hurwitz adalah sebagai berikut
Dengan memeriksa apakah semua bagian pada kolom paling kiri (B1, B2, U1, U2, V1, V2, ...) mempunyai tanda yang sama , hal ini menandakan tidak ada akar pada bidang s sebelah kanan sehingga sistem merupakan sistem yang stabil.
Jika ada perubahan tanda sebanyak x, maka akan terdapat akar sebanyak x pada bidang s sebelah kanan
Misalnya diketahui suatu persamaan karakteristik 1 + G(s) H(s) = s3 + 4s2 + 100s + 500 = 0
baris yang dihasilkan dari persamaan karakteristik adalah baris pertama dan kedua, baris selanjutnya didapatkan dari kedua baris tersebut dengan aturan yang telah ada.
s
31 1 0 0
s
24 5 0 0
s
- 2 5 0
s
05 0 0 0
Ada 2 perubahan tanda pada kolom pertama, yaitu 4 ke -25 dan -25 ke 500 sehingga ada 2 akar pada bidang s sebelah kanan, maka sistem merupakan sistem yang tidak stabil.
Atau dengan menggunakan akar persamaan karakteristik, dimana akarnya adalah -4,8; (0,4+j10); (0,4-j10), maka sistem tidak stabil.
1) Jika pada suatu baris (sebelum s0), kolom paling kiri berharga 0
sedangkan kolom yang lain tidak berharga 0, maka kolom paling kiri yang berharga 0 digantikan konstanta positif yang cukup kecil (ε) Misalnya diketahui persamaan karakteristik sistem adalah
1 + G(s) H(s) = s5 + s4 + 4s3 + 4s2 + 2s + 1 = 0
baris yang dihasilkan :
s5 1 4 2 s4 1 4 1 s3 ( 0 1 0 )
0 s2 4- 1 1 0
s -+ 4- 1 0 0
4- 1 s0 1 0 0
d i g a n t i k a n
Nilai ε
1 4ε
pada kolom paling kiri, baris ke 4 berharga negatif,
nilai
1 4ε
1 4ε ε2