MODUL TRAINING
MIKROKONTROLER AVR
BIDANG KEPROFESIAN
BADAN PENGURUS HME ITB
2009/2010
PENDAHULUAN
Mikrokontroller AVR memiliki arsitektur RISC 8 bit, dimana semua instruksi dikemas dalam kode 16-bit (16-bits word) dan sebagian besar instruksi dieksekusi dalam satu siklus clock, berbeda dengan instruksi MCS51 yang membutuhkan 12 siklus clock. Hal ini terjadi karena perbedaan arsitektur yang dipakai. AVR menggunakan arsitektur RISC (Reduced Instruction Set Computing) sedangkan MCS51 menggunakan arsitektur CISC (Complex Instruction Set Computing).
AVR secara umum dapat dibagi menjadi empat kategori antara lain; ATtiny, AT90Sxx, ATmega, dan AT86RFxx. Yang membedakan keempat kategori diatas secara mendasar ialah ukuran memori, peripheral, dan fungsinya.
Skematik sistem minimum dari AVR versi DIP (Dual Inline Package) 40 pin disajikan pada gambar dibawah ini:
Skematik ISP dongle STK200 yang dihubungkan ke port parallel pada komputer untuk mendownload program dari komputer ke mikrokontroler AVR:
CodeVisionAVR C Compiler
PendahuluanPada Kontes Robot Cerdas Indonesia (KRCI) bahasa pemrograman yang umum dipakai ialah bahasa C. Bahasa ini dipakai karena lebih dekat dan mudah dimengerti oleh manusia. Namun bahasa ini kurang machine friendly. Sehingga untuk beberapa akses membutuhkan code dalam bahasa assembly. Kelebihan yang dimiliki bahasa C adalah dapat dimasukkannya code assembly dalam code C.
Program CodeVisionAVR ini tidaklah gratis. Namun banyak versi evaluasi yang tersedia. Versi evaluasi ini hanya mengijinkan sebagian kecil code dari total code yang bisa di burn ke dalam mikrokontroler. Misal kapasitas flash mikrokontroler sebesar 8KB maka total code yang bisa di compile sekitar 1 KB. Sebenarnya terdapat alternatif lain untuk pemrograman dalam bahasa C dengan menggunakan software WinAVR yang gratis.
Sebagai permulaan maka penulis akan sedikit mencoba memprogram AVR dengan menggunakan CodeVisionAVR karena source code-nya telah tersedia. Selain itu penulis telah mendapatkan beberapa sample hasil pengalaman dan percobaan dari code sendiri serta code gratis yang disediakan di internet. Semua code yang terlampir disini sebagian besar merupakan program robot otaku. Robot ini diperlombakan pada KRCI 2006 di balairung UI. Penulis menggunakan program CodeVisionAVR C Compiler v1.24.7e
Fitur-fitur yang dimiliki CodeVisionAVR terbilang lengkap. Program ini menyediakan interface hyperterminal didalamnya. Hyperterminal ini dapat digunakan untuk berkomunikasi antara mikrokontroler dengan komputer. Untuk proses pembakaran atau pengisian program ke dalam mikrokontroler terdapat tool tersendiri.
Untuk proses debugger program ini akan menyediakan link pada AVR studio 4 yang memang telah memiliki fitur tersebut. Atau jika ingin, sesudah program C di compile oleh CodeVisionAVR maka akan dihasilkan file *.cof yang dapat disimulasikan langsung di AVR studio 4.
Project Management
Setiap akan membuat program baru pada CodeVisionAVR, kita akan diarahkan untuk membuat project terlebih dahulu.
CodeVisionAVR akan menanyakan apakah anda akan menggunakan fasilitas CodeWizardAVR.
Fasilitas ini sangatlah berguna jika anda tidak ingin bersusah payah melakukan settingan dengan mengetik code-code tertentu yang banyak dan kompleks. Intinya terdapat tab-tab yang tinggal klik dan anda akan langsung disajikan contoh kodenya.
Contohnya jika anda ingin membuat program yang memakai eksternal interrupt maka tinggal pilih tab External IRQ pada tampilan CodeWizard. Klik pada INT 0 Enabled untuk memilih external interrupt 0 dan pilih mode
pembangkitan interrupt yang ingin digunakan.
Lihat pada code:
// External Interrupt 0 service routine interrupt [EXT_INT0] void ext_int0_isr(void) {
// Place your code here }
Jika terdapat code diatas maka anda telah mendapatkan header program yang akan dieksekusi jika terjadi trigger eksternal interrupt.
Sebaliknya jika pada pertanyaan apakah akan digunakan CodeWizard anda menjawab tidak (NO), maka akan muncul window Create New Project seperti dibawah ini:
File code yang memiliki ekstensi *.c yang akan dibuat nantinya disave pada suatu tempat dan di masukkan ke dalam project dengan mengklik Add pada tab File seperti diatas. Pada tab C Compiler akan ditemukan tab lagi didalamnya. Tab yang sering digunakan ialah tab Code Generation. Pada tab ini anda akan menentukan mikrokontroler apa dan kecepatan (speed dalam MHz) yang nantinya akan digunakan. Pilih ATmega8535 dan speed yang sesuai dengan frekuensi crystal yang akan digunakan lalu klik OK.
Proses coding menggunakan bahasa C belum dapat dimulai setelah mengkonfigurasi project yang dibuat. Untuk membuat file *.c klik pada menu File dan pilih source dan klik OK.
Selanjutnya akan tampil window utama dengan tampilan dibawah ini. Ingat, file masih dalam bentuk untitled.c dan belum disave. Untuk mengetahuinya dapat dilihat pada sisi kiri dimana file untitled.c terletak pada Other Files. Hal ini meyatakan pula bahwa file untitled.c belum masuk dalam project. Save dulu file untitled.c pada folder yang sama dengan file project dan beri nama yang sama.
Anda akan dihadapkan kembali pada window seperti pada Configure Project diatas. Klik Add dan akan tampil window yang menayakan file *.c mana yang akan dimasukkan kedalam project. Klik OK.
Jika file *.c telah dimasukkan ke dalam project maka statusnya dapat dilihat pada bagian kiri window utama dimana file *.c terdapat pada tree project.
Kini anda siap melakukan coding dalam bahasa C di CodeVisionAVR.
Melakukan proses compiling terhadap sourcecode yang sudah jadi
Klik pada tombol yang ditunjukkan pada gambar dibawah. Tombol tersebut selain melakukan compiling akan mengenerate beberapa file termasuk *.hex yang akan diburn ke mikrokontroler dan file *.coff yang dapat disimulasikan pada AVR studio
Window ini berisi informasi-informasi penting mengenai jenis mikrokontroller, speed, ukuran program, sisa space EEPROM dan FLASH, jumlah error dari code dan sebagainya. Jika terdapat error pada code yang kita buat, maka klik OK dan anda akan kembali pada window utama dengan tampilan seperti dibawah ini:
Untuk mengetahui letak kesalahan pada code anda, tinggal klik pada tab navigator bagian Errors. Atau anda dapat mengklik pada tab Messages untuk mengetahui letak kesalahan pada code. Pada contoh diatas dapat dilihat sintaks #include <mega32.h akan diblok dengan warna biru yang menunjukkan kesalahan terletak pada sintaks tersebut.
Memprogram Chip dengan menggunakan Chip Programmer
Proses compiling yang sukses akan menghasilkan file *.hex pada folder dimana file project disimpan. File *.hex ini telah siap untuk diburn ke dalam mikrokontroler dengan menggunakan tool yang telah tersedia pada CodeVisionAVR yaitu CodeVisionAVR Chip Programmer. Untuk membuka window ini klik pada tombol seperti di bawah ini:
Sebelum mulai memprogram chip, anda harus melakukan setup terhadap programming dongle yang akan digunakan. Pada window utama klik pada menu Settings dan pilih Programmer.
Tampilan window Programmer Settings:
Tipe dongle yang dipakai diatas ialah STK200 yang menggunakan port printer (LPT). Kolom Delay Multiplier berisi pengali yang akan memperlambat proses programming terhadap chip. Penulis sering memakai dongle ini karena simple. Kelemahannya ialah proses programming yang lebih lama jika dibandingkan dengan dongle STK500. Dongle yang dipakai baik STK200 atau STK500 ialah dongle dengan sirkuit pengganti. Karena jika harus membeli maka harga programming dongle itu sangatlah mahal. Tampilan untuk dongle STK500 yang menggunakan port serial (COM):
MEMBUAT PROGRAM SEDERHANA PADA ATMEGA8535
Konfigurasi port I/O pada ATmega8535 dapat dilakukan dengan melakukan settingan:
Port I/O sebagai output:
DDR diset high atau bit 1 dengan mengetikkan DDRx =1; x bisa berarti A,B,C,D (port). Penyettingan ini dilakukan dengan akses per byte pada satu port dengan delapan pin sekaligus. Misal kita ingin menjadikan PA0 menjadi port output, contoh kodenya:
DDRA = 0x01; //menjadikan porta.0 menjadi port output (hex)
DDRA = 0b00000001; //sama dengan diatas namun dengan bilangan bit,
//kedua perintah diatas membuat port selain //porta.0 menjadi port input
Untuk melakukan penyettingan terhadap satu pin saja maka dapat dilakukan dengan DDRx.y = 1; y bisa terdiri angka 0,1,...,7 (8 bit). Contoh kodenya:
DDRA.0 = 1; //menjadikan porta.0 menjadi port output
Memberikan keluaran high pada PA0 dilakukan dengan mengetikan kode: PORTA = 1; //porta.0 diberi logic high ‘1’
Jika ingin memberikan logic high pada lebih dari satu port ketikkan kode:
PORTA = 0xAA; //porta.1,3,5,7 diberi logic high atau PORTA = 0b10101010;
Penyettingan hanya terhadap satu pin saja dari satu port dapat menggunakan kode:
PORTA.2 = 1; //porta.2 memiliki logic high
Port output pada ATmega8535 dapat memberikan arus source sebesar 20 mA. Arus ini cukup untuk menyalakan LED sedang. Arus ini dapat terjadi karena AVR telah memiliki internal pull up resistor di dalamnya untuk setiap pin-nya.
Port I/O sebagai input:
Untuk menjadikan port I/O menjadi port output DDR diset low atau ‘0’. Ketikkan kode
DDRA.0 = 0; //porta.0 menjadi port input
if (PINA.0 == 1) {
PORTA.2 = 1;
} // jika pin A0 = 1, maka port A2 diberi logic high
Port input dapat di pullup dengan menambahkan perintah PORT setelah DDR seperti pada contoh dibawah ini:
DDRA.0 = 0;
PORTA.0 = 1; //membuat porta.0 sebagai input dan di pullup
Contoh program kecil:
#include <mega8535.h> void main()
{
INTERRUPT / INTERUPSI
Interrupt/Interupsi ialah suatu kondisi dimana CPU (Central Processing Unit) mikrokontroler berhenti dari rutinitas yang sedang dikerjakan dan mengerjakan rutinitas lain yang ditunjuk oleh interupsi tersebut. Ketika rutinitas yang ditunjuk interupsi telah selesai dieksekusi, maka CPU akan mulai mengekseskusi rutinitas awal sebelum adanya interupsi yang terhenti dari tempat terakhir.
Pada AVR ATmega8535 terdapat 21 buah interrupt yang ditunjukkan pada tabel dibawah ini:
Pada bagian ini jenis interrupt yang akan dibahas ialah external interrupt. ATmega8535 memiliki tiga buah eksternal interrupt yaitu INT0, INT1, dan INT2. Ketiga interrupt ini yaitu INT0 s.d INT2 akan tertrigger walaupun portnya dikonfigurasi sebagai output. Fitur ini memungkinkan interrupt yang dikondisikan oleh software. Semua interrupt akan tertrigger jika terdapat perubahan rising edge atau falling edge. Mode any change tidak dimiliki INT2, sedangkan INT0 dan INT1 memilikinya. Mode any change memungkinkan interrupt terpanggil baik ketika rising dan falling edge.
Register-register yang harus di setting untuk mengaktifkan eksternal interupsi ialah GICR (General Interrupt Control Register), GIFR (General Interrupt Flag Register), MCUCR (MCU Control Register), dan MCUCSR (MCU Control and Status Register).
GICR (General Interrupt Control Register)
• Bit 7 – INT1: External Interrupt Request 1 Enable Untuk meng-enable kan External Interrupt 1
• Bit 6 – INT0: External Interrupt Request 0 Enable Untuk meng-enable kan External Interrupt 0
• Bit 5 – INT2: External Interrupt Request 2 Enable Untuk meng-enable kan External Interrupt 2
• Bit 7 – INTF1: External Interrupt Flag 1
Ketika terjadi eksternal interrupt pada INT1, maka Flag INTF1 diset 1. Setelah routine eksternal interrupt selesai di eksekusi maka Flag INTF1 diset 0.
• Bit 6 – INTF0: External Interrupt Flag 0
Ketika terjadi eksternal interrupt pada INT0, maka Flag INTF0 diset 1. Setelah routine eksternal interrupt selesai di eksekusi maka Flag INTF0 diset 0.
• Bit 5 – INTF2: External Interrupt Flag 2
Ketika terjadi eksternal interrupt pada INT2, maka Flag INTF2 diset 1. Setelah routine eksternal interrupt selesai di eksekusi maka Flag INTF2 diset 0.
MCUCR (MCU Control Register)
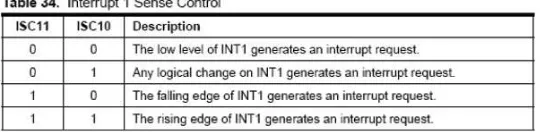
• Bit 3, 2 – ISC11, ISC10: Interrupt Sense Control 1 Bit 1 and Bit 0
Bit ini mengatur sensitifitas yang akan dimiliki oleh port eksternal interrupt 1. pilihan sensitifitas dapat dilihat pada tabel dibawah:
• Bit 1, 0 – ISC01, ISC00: Interrupt Sense Control 0 Bit 1 and Bit 0
Bit ini mengatur sensitifitas yang akan dimiliki oleh port eksternal interrupt 0. pilihan sensitifitas dapat dilihat pada tabel dibawah:
MCUCSR (MCU Control and Status Register)
• Bit 6 – ISC2: Interrupt Sense Control 2
Jika ISC2 ditulis 0 maka falling edge pada INT2 akan mengaktifasi interupsi. Jika ISC2 ditulis 1, maka rising edge pada INT2 akan mengaktifasi interupsi.
Contoh program yang menggunakan ketiga eksternal interrupt diatas:
#include <mega32.h>
// External Interrupt 0 service routine interrupt [EXT_INT0] void ext_int0_isr(void) {
PORTA.0 = 1; }
// External Interrupt 1 service routine interrupt [EXT_INT1] void ext_int1_isr(void) {
}
// External Interrupt 2 service routine interrupt [EXT_INT2] void ext_int2_isr(void) {
PORTA.2 = 1; }
void main() {
DDRD.2 = 0; //pind.2 INT0 (input) DDRD.3 = 0; //pind.3 INT1 (input) DDRB.2 = 0; //pinb.2 INT2 (input) DDRA.0 = 1; //output
DDRA.1 = 1; //output DDRA.2 = 1; //output
// External Interrupt(s) initialization // INT0: On
// INT0 Mode: Rising Edge // INT1: On
// INT1 Mode: Rising Edge // INT2: On
// INT2 Mode: Rising Edge
GICR |=0xE0; // GICR |=0b11100000 MCUCR =0x0F; // MCUCR =0b00001111 MCUCSR=0x40; // MCUCSR=0b01000000 GIFR =0xE0; // GIFR =0b11100000
#asm("sei") //global enable interrupts (SREG) While(1)
TIMER / COUNTER
Timer/Counter pada mikrokontroler AVR dapat digunakan untuk melakukan pencacahan waktu seperti pada jam digital maupun untuk menghasilkan sinyal PWM (Pulse Width Modulation) yakni sinyal kotak dengan frekuensi dan duty cycle yang nilainya bisa diatur. Atmega8535 memiliki tiga unit Timer/Counter yaitu Timer/Counter 0 (8 bit), Timer/Counter 1 (16 bit), dan Timer/Counter 2 (8 bit).
1. TIMER/COUNTER 0 Fitur-fitur yang dimiliki:
• Satu buah unit Compare Counter (Unit ini akan meng-count dan meng-compare) • Clear timer pada saat compare match (Auto reload)
• Phase Correct PWM yang bebas glitch • Frequency generator
• External event counter • Prescaler clock hingga 10 bit
• Source interrupt overflow dan compare match (TOV0 dan OCF0)
Definisi timer:
Timer/Counter adalah sebuah unit yang dapat menghitung (Counter) dan melakukan timing dengan menggunakan frekuensi kristal sebagai sumber clock counternya internal atau sumber eksternal melalui pin T0.
Berikut blok diagram Timer/Counter 0:
Register
Timer/Counter (TCNT0) dan Output Compare Register (OCR0) adalah register 8 bit. Sinyal permintaan interrupt dapat dilihat pada TIFR (Timer Interrupt Flag Register). Semua interrupt secara individual terlindungi oleh Timer Interrupt Mask Register (TIMSK). TIMSK dan TIFR tidak diperlihatkan pada gambar diatas karena penggunaannya di-share dengan unit timer yang lain.
Timer/Counter dapat diberi sumber clock secara internal dan dapat diatur frekuensinya dengan prescaler bit (bit pembagi) atau diberi sumber clock eksternal melalui pin T0. Blok Clock Select Logic akan menentukan sumber clock mana yang digunakan untuk menambah atau mengurangi nilai yang terdapat pada register timernya. Timer/Counter akan tidak aktif ketika tidak ada sumber clock yang dipilih.
Nilai yang ada pada Output Compare Register (OCR) akan di bandingkan dengan nilai yang ada pada Timer/Counter setiap saat. Hasil dari proses pembandingan ini dapat digunakan waveform generation untuk menghasilkan PWM (Pulse Width Modulation) atau output yang memiliki frekuensi yang berubah pada pin Output Compare (OC0). Kejadian pembandingan output yang sesuai nilainya antara OCR dan nilai pada Timer/Counter akan mengeset nilai pada Output Compare Flag (OCF0) yang dapat digunakan untuk menghasilkan permintaan output compare interrupt.
Definisi
BOTTOM Counter akan mencapai BOTTOM ketika bernilai 0x00
MAX Counter akan mencapai MAX ketika bernilai 0xFF (dalam decimal 255)
TOP Counter akan mencapai TOP ketika bernilai sama dengan nilai tertinggi dalam urutan penghitungan. Nilai TOP ini dapat ditetapkan dari nilai fix seperti 0xFF (MAX) atau nilai yang terdapat pada register OCR0. Penetapan nilai TOP ini bergantung pada mode operasi yang sedang dijalankan
Unit Counter
Bagian utama dari Timer/Counter 8-bit ialah unit counter yang dapat diprogram secara bi-directional. Gambar dibawah ini memperlihatkan blok diagram dari unit counter dan lingkungannya.
Deskripsi sinyal:
Count Increment (menambah) atau decrement (mengurangi) TCNT0 dengan nilai 1 Direction Untuk memilih antara menambah atau mengurangi
Clear Clear TCNT0 (mengeset semua nilai menjadi 0)
TOP Memberi sinyal bahwa TCNT0 telah mencapai nilai maksimum BOTTOM Memberi sinyal bahwa TCNT0 telah mencapai nilai minimum (nol)
Unit Output Compare
Komparator 8 bit secara kontinu membandingkan nilai TCNT0 dengan nilai register Output Compare (OCR0). Ketika TCNT0 sama dengan OCR0, maka komparator akan memberi sinyal bahwa terjadi kesamaan. Kesamaan ini akan mengeset Output Compare Flag (OCF0) pada saat clock cycle timer selanjutnya. Jika OCIE0 = 1 dan Global Interrupt Flag di SREG di set, maka Output Compare Flag akan menghasilkan interupsi output compare. Flag OCF0 akan secara otomatis di clear kan ketika interupsi dieksekusi. Gambar dibawah ini memperlihatkan blok diagram unit Output Compare.
Mode Operasi
Untuk mode yang non-PWM maka bit-bit COM01:0 akan mengontrol output akan di set, di clear, atau di balik (toggle) saat terjadi compare match.
Mode-mode yang terdapat antara lain:
• Mode Normal
Mode operasi yang paling simpel ialah mode normal (WGM01:0 = 0). Pada mode ini arah penghitungan selalu naik (incrementing), dan tidak terdapat clear terhadap counter yang dilaksanakan. Counter akan mengalami overrun ketika telah mencapai nilai maksimumnya yaitu 8 bit (TOP = 0xFF) dan direstart dari bawah (0x00). Pada operasi normal, Flag Overflow Timer/Counter (TOV0) akan di set pada saat clock cycle timer yang sama ketika TCNT0 menjadi nol. Flag TOV0 ini jika digabungkan dengan dengan interupsi timer overflow yang akan secara otomatis mengclearkan flag TOV0, maka resolusi timer akan dapat ditingkatkan melalui software.
• Mode Clear Timer on Compare (CTC) match
Pada mode CTC ini (WGM01:0 = 2), register OCR0 digunakan untuk memanipulasi resolusi counter. Pada mode ini counter akan di clear menjadi nol ketika nilai counter (TCNT0) mengalami nilai yang sama dengan OCR0. OCR0 mendefinisikan nilai TOP dari counter dan juga resolusi dari counter tersebut. Mode ini memberikan kontrol yang lebih besar pada frekuensi output compare match. Hal ini pula mempermudah operasi penghitungan event eksternal. Diagram timing untuk mode CTC ditunjukkan pada gambar. Nilai counter (TCNT0) naik terus hingga terjadi compare match antara TCNT0 dan OCR0, lalu counter (TCNT0) di clear kan (di nol kan).
Interupsi dapat dibangkitkan setiap kali nilai counter mencapai TOP dengan menggunakan flag OCF0. Jika interupsi diaktifkan, maka interrupt handler routine (rutinitas yang akan dieksekusi ketika terjadi interupsi) dapat digunakan untuk mengupdate nilai TOP. Bagaimanapun, mengubah nilai TOP dengan nilai yang dekat dengan nilai BOTTOM ketika counter sedang berjalan dengan nilai prescaler yang rendah atau nol harus dilakukan dengan ekstra hati-hati karena mode CTC tidak memiliki fitur double buffering. Jika nilai yang dimasukkan ke dalam OCR0 lebih rendah daripada nilai saat itu yang terdapat pada TCNT0, maka counter akan kehilangan event compare match. Counter akan menghitung hingga nilai maksimum (0xFF) lalu mulai kembali dari 0x00 sebelum event compare match terjadi.
Untuk menghasilkan output yang berupa gelombang pada mode CTC, output OC0 dapat diset untuk mentoggle logic level output tersebut setiap terjadi event compare match dengan mensetting mode Compare Output menjadi mode toggle (COM01:0 = 1). Nilai OC0 tidak akan muncul pada port pin hingga data direction untuk pin di set menjadi output. Baca kembali bagian Basic Input Output diatas pada seksi Port I/O sebagai output. Frekuensi dari gelombang yang dibangkitkan akan memiliki frekuensi maksimum f
OC0 = fclk_I/O/2 ketika OCR0
diset bernilai nol (0x00). Frekuensi dari gelombang didefinisikan melalui persamaan sebagai berikut:
Variabel N merepresentasikan faktor nilai prescaler (1, 8, 64, 256, atau 1024)
• Mode Fast PWM
Mode fast Pulse Width Modulation atau mode fast PWM (WGM01:0 = 3) memberikan opsi untuk membangkitkan gelombang PWM yang berfrekuensi tinggi. Operasi fast PWM ini berbeda dengan dengan opsi PWM lain yang ditandai dengan operasi kemiringan tunggalnya (single slope operation). Counter akan menghitung mulai dari BOTTOM hingga MAX lalu restart kembali dari BOTTOM. Pada mode non-inverting Compare Output, Output Compare (OC0) akan di clear kan (0) ketika terjadi event compare match antara TCNT0 dan OCR0, dan di set (1) pada nilai BOTTOM. Pada mode inverting Compare Output, output di set ketika terjadi event compare match dan di clear kan pada BOTTOM. Karena operasinya yang single slope, maka frekuensi operasinya fast PWM dapat mencapai dua kali lebih tinggi dari frekuensi operasi mode phase correct PWM yang menggunakan operasi dual slope. Frekuensi yang tinggi ini membuat mode fast PWM cocok digunakan untuk aplikasi power regulation, rectification, dan aplikasi DAC (Digital to Analog Converter). Frekuensi yang tinggi membolehkan penggunaan komponen fisik eksternal seperti kapasitor dan induktor yang kecil yang dapat mengurangi biaya total sistem.
Pada mode fast PWM, counter akan menghitung secara naik (incremented) hingga nilai counter mencapai nilai MAX. Counter kemudian di clear kan pada saat clock cycle timer selanjutnya. Diagram timing untuk mode fast PWM ditunjukkan pada gambar. Nilai TCNT0 pada diagram ditunjukkan dengan setengah segitiga histogram untuk mengilustrasikan operasi single slope. Garis panah horizontal kecil yang menandai kemiringan TCNT0 merepresentasikan event compare match antara TCNT0 dan OCR0.
Flag overflow Timer/Counter (TOV0) akan di set setiap kali counter mencapai nilai MAX. Jika interupsi diaktifkan, maka interrupt handler routine dapat digunakan untuk mengupdate nilai compare.
Pada mode fast PWM, unit compare dapat digunakan untuk membangkitkan gelombang PWM pada pin OC0. Mengeset bit-bit COM01:0 menjadi 2 akan menghasilkan non-inverted PWM dan inverted PWM dapat dihasilkan dengan mengeset bit-bit tersebut menjadi 3. Nilai OC0 yang aktual akan dapat didapat pada port pin jika data direction pada port pin di set sebagai ouput. Gelombang PWM dibangkitkan dengan mengeset (atau mengclearkan) register OC0 pada saat terjadi compare match antara TCNT0 dan OCR0, dan mengclearkan (atau mengeset) register OC0 pada clock cycle timer saat counter di clearkan (perubahan ketika MAX menuju BOTTOM).
Frekuensi PWM dari output dapat dihitung melalui persamaan berikut ini:
Variabel N merepresentasikan nilai faktor prescaler (1, 8, 64, 256, 1024).
• Mode Phase Correct PWM
Mode phase correct PWM (WGM01:0 = 1) memberikan opsi untuk membangkitkan gelombang phase correct PWM yang memiliki resolusi tinggi. Mode phase correct PWM ini berdasarkan pada operasi dual slope (dua kemiringan yaitu kemiringan naik dan turun). Counter akan menghitung secara berulang-ulang dari BOTTOM menuju MAX lalu dari MAX menuju BOTTOM. Pada mode non-inverting Compare Output, Output Compare (OC0) akan di clear kan ketika terjadi event compare match antara TCNT0 dan OCR0 ketika penghitungan naik (upcounting), dan di set ketika terjadi event compare match pada saat penghitungan mundur (downcounting). Pada mode inverting Output Compare, operasinya di invert atau dibalik. Operasi dual slope memiliki frekuensi maksimum yang lebih rendah daripada operasi single slope. Bagaimanapun, karena fitur kesimetrisan dari mode PWM dual slope ini menjadikannya cocok untuk aplikasi kontrol motor.
arah penghitungan dibalik yaitu mundur atau berkurang. Nilai TCNT0 akan sama dengan nilai MAX dalam waktu satu clock cycle timer. Diagram timing untuk mode phase correct PWM ini diperlihatkan pada gambar. Nilai TCNT0 pada diagram menunjukkan bentuk histogram segitiga penuh untuk mengilustrasikan operasi dual slope. Diagram ini memberikan ilustrasi output inverting dan non inverting. Garis panah horizon yang menandai kemiringan TCNT0 merepresentasikan event compare match antara TCNT0 dan OCR0.
Flag overflow Timer/Counter (TOV0) akan di set setiap kali counter mencapai BOTTOM. Flag interupsi dapat digunakan untuk membangkitkan interupsi setiap kali counter mencapai nilai BOTTOM.
Pada mode phase correct PWM, unit compare dapat digunakan untuk membangkitkan gelombang PWM pada pin OC0. Dengan mengeset bit-bit COM01:0 menjadi 2 akan menghasilkan PWM non-inverting. Output PWM inverting dapat dihasilkan dengan mengeset bit-bit COM01:0 menjadi 3. Nilai aktual OC0 akan terlihat pada port pin jika data direction untuk port pin diset menjadi output. Gelombang PWM dibangkitkan dengan mengclearkan (atau mengeset) register OC0 pada saat compare match antara TCNT0 dan OCR0 ketika counter menghitung naik (increment), dan mengeset (atau mengclearkan) register OC0 pada saat compare match antara TCNT0 dan OCR0 ketika counter melakukan penghitungan mundur (decrement). Frekuensi output PWM ketika menggunakan phase correct PWM dapat dihitung melalui persamaan:
Variabel N merepresentasikan nilai faktor prescaler (1, 8, 64, 256, atau 1024)
Nilai ekstrim untuk register OCR0 merepresentasikan kasus spesial ketika membangkitkan output gelombang PWM pada mode phase correct PWM. Jika OCR0 di set sama dengan BOTTOM, maka output akan secara kontinyu bernilai low atau 0 dan jika OCR0 diset sama dengan MAX maka output akan secara kontinyu bernilai high atau 1. untuk PWM inverted nilainya akan memiliki logika yang berkebalikan.
Pada permulaan perioda 2 pada gambar OCn memiliki transisi dari high menuju low walaupun tidak terdapat compare match. Poin penting dari kejadian ini adalah untuk menjamin kesimetrisan di sekitar BOTTOM. Terdapat dua kasus yang yang dapat menghasilkan transisi walaupun pada keadaan aslinya tidak terdapat compare match:
Nilai OCR0A berubah dari nilai MAX seperti pada gambar. Ketika nilai OCR0A ialah MAX maka nilai pin OCn akan sama dengan hasil compare match ketika down counting. Untu memastikan kesimetrian disekitas BOTTOM maka nilai OCn ketika MAX berkorespondensi dengan hasil compare match ketika up counting. Timer mulai menghitung pada nilai yang lebih besar dari OCR0A, dan untuk alasan itu akan mengalami
Deskripsi register timer/counter 8 bit Timer/Counter Control Register (TCCR0)
• Bit 7 – FOC0 : Force Output Compare
Bit FOC0 hanya aktif ketika bit WGM00 menspesifikasikan mode non-PWM. Bagaimanapun, untuk memastikan kompatibilitas dengan peralatan masa depan, bit ini harus diset nol ketika TCCR0 ditulis ketika beroperasi pada mode PWM.
• Bit 6, 3 – WGM01:0 : Waveform Generation Mode
Bit ini mengontrol urutan penghitungan dari counter, sumber bagi nilai counter maksimum (TOP), dan tipe apa dari Waveform Generation yang akan digunakan. Mode operasi yang disupport oleh unit Timer/Counter ialah: mode Normal, mode Clear Timer on Compare Match (CTC), dan dua tipe mode PWM.
• Bit 5, 4 – COM01:0 : Compare Match Output Mode
Bit ini mengontrol kelakuan pin Output Compare (OC0). Jika satu atau lebih bit pada COM01:0 di set, maka output OC0 akan mengesampingkan fungsionalitas normal port dari pin I/O yang terhubung padanya. Bagaimanapun, harus dicatat bahwa bit Data Direction Register (DDR) yang berhubungan dengan pin OC0 harus di set dalam rangka untuk mengaktifkan driver output.
Ketika OC0 terhubung pada pin, fungsi dari bit-bit COM01:0 bergantung kepada settingan bit WGM01:0. Tabel memperlihatkan fungsionalitas dari tiap-tiap bit COM01:0 ketika bit-bit WGM01:0 di set ke mode Normal atau mode CTC (non-PWM).
Tabel 41 memperlihatkan fungsionalitas dari tiap-tiap bit COM01:0 ketika bit-bit WGM01:0 di set ke mode phase correct PWM.
• Bit 2:0 - CS02:0 : Clock Select
Tiga buah bit Clock Select akan memilih sumber clock yang akan dipakai oleh Timer/Counter.
Jika mode pin eksternal digunakan untuk Timer/Counter0, transisi pada pin T0 akan memberi clock pada counter walaupun pin tersebut dikonfigurasi sebagai pin output. Fitur ini memberikan kesempatan untuk mengontrol clock secara software.
Timer/Counter Register - TCNT0
Register Timer/Counter memberikan akses langsung, baik untuk operasi baca dan tulis ke unit counter 8-bit Timer/Counter0. Memodifikasi counter (TCNT0) ketika counter sedang berjalan, akan menampilkan resiko kehilangan compare match antara register TCNT0 dan OCR0.
Output Compare Register - OCR0
Output Compare Register memiliki 8 bit nilai yang secara kontinyu dibandingkan dengan nilai counter (TCNT0). Sebuah match atau kesamaan dapat digunakan untuk menghasilkan interupsi output compare, atau untuk membangkitkan output berupa gelombang pada pin OC0.
Timer/Counter Interrupt Mask Register - TIMSK
Ketika bit OCIE0 di tulis 1, dan bit-I pada Status Register di set (1), maka interupsi compare match Timer/Counter0 diaktifkan. Interupsi yang bersangkutan akan dieksekusi jika compare match pada Timer/Counter0 terjadi atau dengan kata lain bit OCF0 diset di Timer/Counter Interrupt Flag Register - TIFR. • Bit 0 - TOIE0: Timer/Counter0 Overflow Interrupt Enable
Ketika bit TOIE0 di tulis 1, dan bit-I pada Status Register di set (1), maka interupsi overflow Timer/Counter0 diaktifkan. Interupsi yang bersangkutan akan dieksekusi jika overflow pada Timer/Counter0 terjadi atau dengan kata lain bit TOV0 diset di Timer/Counter Interrupt Flag Register - TIFR.
Timer/Counter Interrupt Flag Register – TIFR
• Bit 1 - OCF0: Output Compare Flag 0
Bit OCF0 akan di set (1) ketika terjadi compare match antara Timer/Counter0 dan data pada OCR0 - Output Compare Register. OCF0 akan di clearkan oleh hardware ketika mengeksekusi interrupt handling vektor yang berkaitan.
• Bit 0 - TOV0: Timer/Counter0 Overflow Flag
Bit TOV akan di set (1) ketika terjadi overflow pada Timer/Counter0. TOV akan di clear kan oleh hardware ketika mengeksekusi interrupt handling vektor yang berkaitan.
2. TIMER/COUNTER1 (16-BIT)
Unit Timer/Counter 16-bit mengijinkan timing eksekusi program yang akurat (event management), pembangkitan gelombang, dan mengukur timing sinyal. Fitur utama unit ini adalah:
• Desain 16 bit yang sesungguhnya • Dua unit independen Output Compare • Double buffered Output Compare Register • Satu buah unit Input Capture
• Clear Timer ketika terjadi Compare Match (Auto Reload) • Phase Correct PWM yang bebas glitch
• Periode PWM yang variabel • Generator Frekuensi • External Event Counter
• Empat buah sumber Interupsi independen (TOV1, OCF1A, OCF1B, dan ICF1)
Register
Register Timer/Counter (TCNT1), Output Compare Register (OCR1A/B), dan Input Capture Register (ICR1) ialah register 16-bit.
Untuk melakukan penulisan 16-bit, high byte harus dituliskan terlebih dahulu sebelum low byte. Untuk melakukan pembacaan 16-bit, pembacaan low byte dilakukan terlebih dahulu sebelum pembacaan high byte.
Definisi
BOTTOM Counter akan mencapai BOTTOM ketika bernilai 0x0000.
MAX Counter akan mencapai MAXimum ketika bernilai 0xFFFF (desimal 65535).
TOP Counter akan mencapai TOP ketika mencapai nilai tertinggi dalam alur penghitungan. Nilai TOP dapat dimasukkan ke dalam salah satu nilai fix: 0x00FF, 0x01FF, atau 0x03FF atau pada nilai yang tersimpan pada register OCR1A atau ICR1. Pemasukan nilai TOP ini bergantung pada mode operasi yang dijalankan.
Unit Counter
Deskripsi sinyal (sinyal internal):
Count Increment atau decrement TCNT dengan nilai 1. Direction Pilih antara increment dan decrement
Clear Clear TCNT1 (mengeset semua bit menjadi nol)
TOP Memberi sinyal bahwa TCNT1 telah mencapai nilai maksimum BOTTOM Memberi sinyal bahwa TCNT1 telah mencapai nilai minimum (nol)
Counter 16-bit dipetakan ke dalam dua buah lokasi I/O memori 8-bit: Counter High (TCNT1H) mengandung delapan bit paling atas dari counter, dan Counter Low (TCNT1L) mengandung delapan bit yang bawah. Register TCNT1H hanya dapat diakses secara indirect oleh CPU. Ketika CPU mengakses lokasi I/O TCNT1H, CPU akan mengakses high byte register temporary (TEMP). Register temporary ini diupdate dengan nilai TCNT1H ketika TCNT1L dibaca, dan TCNT1H diupdate dengan nilai pada register temporary ketika TCNT1L ditulis.
Bergantung pada mode operasi yang digunakan, counter akan di clear kan, di increment, atau di decrement setiap clock timer. Sumber clock timer ini dapat dibangkitkan dari sumber internal atau eksternal, yang dipilih melalui bit Clock Select (CS12:0). Ketika tidak ada sumber clock yang dipilih (CS12:0 = 0) maka timer akan berhenti. Alur penghitungan ditentukan dengan mengeset bit-bit Waveform Generation Mode (WGM13:0) yang berlokasi di Timer/Counter Control Register A dan B (TCCR1A dan TCCR1B).
Mode Operasi
Mode operasi ialah kelakuan dari Timer/Counter dan pin output compare yang didefinisikan melalui kombinasi bit-bit yang ada pada Waveform Generation mode (WGM13:0) dan bit-bit-bit-bit pada Compare Output mode (COM1x1:0). Bit-bit mode Compare Output tidak mempengaruhi alur penghitungan, sedangkan bit-bit mode Waveform Generation mempengaruhi. Bit-bit COM1x1:0 mengontrol apakah output PWM yang dibangkitkan akan di invert atau tidak (inverted atau non-inverted PWM). Untuk mode non-PWM, bit-bit COM1x1:0 mengontrol apakah output akan di set, di clear atau di toggle ketika terjadi compare match.
• Mode Normal
KOMUNIKASI MIKROKONTROLER ATMEGA32 DAN PC DENGAN METODE USART
Pada bagian ini akan dibahas sedikit mengenai salah satu fitur mikrokontroler AVR yakni ATMega32 untuk berkomunikasi dengan komputer melalui port serial / DB9 dengan 9 buah pin yang dapat dijumpai di belakang CPU komputer desktop. Untuk menyesuaikan level tegangan dari mikrokontroler ke port serial diperlukan IC MAX232 seperti terlihat pada gambar di bawah
Pada IC MAX232, pin nomor 11 (TXD) dihubungkan ke pin 14 (RXD) dari ATMega32. Sedangkan pin nomor 12 pada IC MAX232 (RXD) dihubungkan ke pin 15 (TXD) dari ATMega32.
Berikut adalah source code yang dipergunakan untuk melakukan komunikasi secara serial:
#include <mega32.h>
//************************** Global Variable Declaration *************************** char Str[16];
char slave_data='0'; //variabel u/ memastikan slave telah selesai melakukan tugasnya //************************** USART Routine ***************************
bit rx_buffer_overflow;
// USART Receiver interrupt service routine
interrupt [USART_RXC] void usart_rx_isr(void) //untuk melakukan aksi setelah menerima data masuk {
char status,data; status=UCSRA; data=UDR;
if ((status & (FRAMING_ERROR | PARITY_ERROR | DATA_OVERRUN))==0) {
//bagian ini mengambil data kiriman dan menampilkannya ke lcd slave_data = data;
// Get a character from the USART Receiver buffer #define _ALTERNATE_GETCHAR_
// USART Transmitter interrupt service routine interrupt [USART_TXC] void usart_tx_isr(void)
// Write a character to the USART Transmitter buffer #define _ALTERNATE_PUTCHAR_
{
tx_buffer[tx_wr_index]=c;
if (++tx_wr_index == TX_BUFFER_SIZE) tx_wr_index=0; ++tx_counter;
} else UDR=c; #asm("sei") }
#pragma used- #endif void main() {
lcd_init(16); lcd_clear(); lcd_gotoxy(0,0);
sprintf(Str,"Agfa keren bgt!!"); lcd_puts(Str);
delay_ms(1000);
//perintah printf dibawah ini digunakan untuk mengirim data melalui serial printf("1");
while(slave_data != 'x' ) {};
ANALOG TO DIGITAL CONVERTER (ADC)
Pada mikrokontroler AVR terdapat fitur ADC yang dapat digunakan untuk melakukan pembacaan tegangan analog ke dalam bentuk digital sehingga ADC banyak digunakan dalam perancangan alat ukur digital. Secara umum, proses inisialisasi ADC meliputi proses penentuan clock, tegangan referensi, format output data, dan mode pembacaan.
Register ADMUX
Register yang perlu diset nilainya adalah ADMUX (ADC Multiplexer Selection Register), ADCSRA (ADC Control and Status Register), dan SFIOR (Special Function IO Register). ADMUX merupakan register 8 bit yang berfungsi menentukan tegangan referensi ADC, format data output, dan saluran ADC yang digunakan.
Untuk memilih channel ADC yang digunakan (single ended atau diferensial), dilakukan dengan mengatur nilai MUX4 :0. Misalnya channel ADC0 sebagai input ADC, maka MUX4 :0 diberi nilai 00000B. Informasi lebih lengkap dapat dilihat pada datasheet mikrokontroler yang dipakai.
Konfigurasi ADC
Tegangan referensi ADC dapat ditentukan antara lain dari pin AREF, pin AVCC atau menggunakan tegangan referensi internal mikrokontroler sebesar 2.56V. Agar fitur ADC mikrokontroler dapat digunakan maka ADEN (ADC Enable, dalam I/O register ADCSRA) harus diberi nilai 1.
Setelah konversi selesai (ADIF high), hasil konversi dapat diperoleh pada register hasil (ADCL, ADCH).Untuk konversi single ended, hasilnya ialah :
Di mana VIN ialah tegangan pada input yang dipilih dan VREF merupakan tegangan referensi. Jika hasil ADC =000H, maka menunjukkan tegangan input sebesar 0V, jika hasil ADC=3FFH menunjukkan tegangan input sebesar tegangan referensi dikurangi 1 LSB.
Sebagai contoh, jika diberikan VIN sebesar 0.2V dengan VREF 5V, maka hasil konversi ADC ialah 41. Jika menggunakan differensial channel, hasilnya ialah 40.96, yang bila digenapkan bisa sekitar 39,40,41 karena ketelitian ADC ATmega 16 sebesar +- 2LSB. Jika yang digunakan saluran diferensial, maka hasilnya ialah :
Melakukan setting penggunaan ADC dengan CodeWizardAVR
Dengan mencentang ADC Enabled akan mengaktifkan on-chip ADC. Dengan mencentang Use 8 bits, maka hanya 8 bit terpenting yang digunakan. Hasil konversi 10 bit dapat dibaca pada ADC Data Registers ADCH dan ADCL. Misalnya, jika hasil konversi ADC bernilai 54(36H), dalam 10 bit biner ditulis dengan 00 0011 0110B. Jika dalam format right adjusted (ADLAR=0), maka I/O register ADCH berisi 0000 0000B(00H) dan I/O register ADCL berisi 0011 0110B (36H).
Penerapan ADC untuk pengukuran suhu
Salah satu aplikasi ADC pada mikrokontroler AVR (di sini digunakan ATMega16) adalah untuk melakukan pengukuran suhu. Dalam hal ini, transduser / pengubah suhu ke dalam bentuk tegangan yang digunakan adalah IC LM35.
Menerima data ADC
Langkah-langkah:
1. Siapkan Smart AVR ATmega 16 ver. 2.0, dan hubungkan dengan kabel AVR ISP Programmer ke PC. Hubungkan juga kabel serial dari mikrokontroler ke PC. Hubungan keluaran sensor suhu LM35 di PA.0, dengan susunan sensor sebagai berikut:
Sensor suhu LM35
Konfigurasi ADC dan Serial
Berikut adalah source code pengukuran suhu menggunakan ADC untuk ATMega16 (Nama file ADC.c)
// Percobaan 7.1, percobaan terima data ADC dari sensor LM35 // LED terhubung di Port B
#include <mega16.h> #include <stdio.h> #include <delay.h>
#define ADC_VREF_TYPE 0x60
flash unsigned char string1[]={"data adc: %d; "}; // Baca 8 bit terpenting
unsigned char read_adc(unsigned char adc_input) { ADMUX=adc_input | (ADC_VREF_TYPE & 0xff);
// Delay needed for the stabilization of the ADC input voltage delay_us(10);
// Mulai konversi ADC ADCSRA|=0x40;
// Tunggu konversi ADC selesai while ((ADCSRA & 0x10)==0); ADCSRA|=0x10;
return ADCH; }
// Inisialisasi Port B PORTB=0xFF;
DDRB=0xFF;
// Timer/Counter 0 initialization // Clock source: System Clock // Clock value: Timer 0 Stopped // Mode: Normal top=FFh
// Communication Parameters: 8 Data, 1 Stop, No Parity // USART Receiver: On
// Analog Comparator Input Capture by Timer/Counter 1: Off ACSR=0x80;
SFIOR=0x00;
// ADC initialization
// ADC Auto Trigger Source: Free Running // Only the 8 most significant bits of // the AD conversion result are used ADMUX=ADC_VREF_TYPE & 0xff;
ADCSRA=0xA7; SFIOR&=0x1F; while (1) {
//Panggil fungsi baca adc di sini };
}
3. Lakukan kompilasi dan jalankan. Sambil memanaskan LM35, lihat perubahan nyala LED di port B atau di Hyperterminal.