TUGAS AKHIR
Diajukan Untuk Memenuhi Salah Satu Syarat
Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
Oleh:
Yustina Novita Puspitawati
NIM : 045114034
PROGRAM STUDI TEKNIK ELEKTRO
JURUSAN TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
ii
Presented as Partial Fulfillment of the Requirements
To Obtain the Sarjana Teknik Degree
In Electrical Engineering Study Program
By:
Yustina Novita Puspitawati
Student Number: 045114034
ELECTRICAL ENGINEERING STUDY PROGRAM
DEPARTMENT OF ELECTRICAL ENGINEERING
FACULTY OF SCIENCE AND TECHNOLOGY
SANATA DHARMA UNIVERSITY
KENDALI SUDUT PADA MODEL IIELIKOPTER BERBASIS PD
DIGITAL
f u . . , - "
B. Wuri
Pembimbing II
vi
Karya ini ku persembahan kepada :
•
Yesus Kristus atas nafas yang Kau berikan
selama ini.
•
Kedua Orang Tua ku (Yustinus Siswanto dan
Yovita Murtini) atas kepercayaan yang telah
diberikan slama ini.
•
Kakak (Veronika Ika Puspita Kusumawati), Adikku (Fredes
Winda Oktaviani Puspitaningrum) dan Ponakanku
(Ferdinant Vincent Yoga Kusuma Pandya).
•
Seseorang yang kukasihi dan mengasihiku.
Tetaplah Bertahan walaupun keadaan Tertekan,,,
Kemarin adalah Sejarah,,,,
Besok adalah Misteri,,,
Hari ini adalah Hadiah,,,
viii
derajat model helikopter tersebut berubah. Untuk mempertahankan sudut yang
diinginkan, pengguna biasanya mempertahankan
key
pada
remote control
tersebut.
Untuk memudahkan pengguna mengetahui berapa derajat model
helikopter itu berubah dan untuk mempertahankan posisi keadaan tersebut, maka
penulis merancang pemodelan helikopter yang dapat mempertahankan keadaan
sudut yang diinginkan dengan perubahan sudut 15
°
. Pengaturan gerak
horizontal
pada model helikopter ini menggunakan mikrokontroler berbasis algoritma PD
digital. Pengaturan gerakan sudut pada heli berdasarkan atas masukan yang
berasal dari PC, terdapat LCD untuk mengetahui berapa perubahan sudut yang
terjadi.
Dari hasil pengujian dan analisa alat ini dapat mengendalikan sudut gerak
horizontal
helikopter dengan tingkat kesalahan yang tidak terlalu besar, yaitu
kurang dari 5%.
ix
change. The user usually hold key on the remote control to preserve the degrees
that he wants.
To make easier the user know how many degrees the model changing and
to hold the position, writer make a helicopter modeling that can hold the wanted
degrees position with change 15
°
. The arrangement of horizontal movement on
the helicopter model is use microcontroller based on digital PD algorithm. T
hearrangement of angel movements on the helicopter based on input from pc, LCD
to know how many angel change that happen.
x
Syukur kepada Tuhan Yang Maha Esa karena penyertaan dan
hikmatnya sehingga Penulis dapat menyelesaiakan penulisan karya tugas akhir ini.
Penulis berharap agar karya tulis ini dapat berguna bagi perkembangan ilmu
pengetahuan pada bidang kendali elektronika di Universitas Sanata Dharma pada
khususnya dan di Indonesia pada umumnya.
Tugas akhir ini ditulis untuk memenuhi salah satu syarat dalam
memperoleh gelar sarjana teknik pada program studi Teknik Elektro Universitas
Sanata Dharma. Penulisan ini didasarkan pada hasil-hasil yang penulis peroleh
pada saat perancangan alat, pembuatan alat, sampai pada hasil pengujian alat.
Penulis ingin mengucapkan terima kasih kepada beberapa pihak yang
telah memberikan banyak bimbingan, bantuan, dan arahan sehingga tulisan ini
dapat terselesaikan, diantaranya :
1.
Tuhan Yesus Kristus, untuk semua perlindungan dan hikmat
pengetahuanNya, terutama untuk nafas yang Engkau berikan
kepada penulis.
2.
Kedua Orang Tua Penulis (Yustinus Siswanto dan Yovita
Murtini), yang tak henti-hentinya memberi didikan sehingga
penulis bisa menyelesaikan di bangku kuliah ini.
3.
Kakak dan adik penulis (Ika dan Winda).
xi
membimbing penulis hingga dapat berhasil.
6.
Bapak dan Ibu dosen pengajar di Prodi Teknik Elektro Universitas
Sanata Dharma untuk bimbingan dan pengajarannya selama
penulis menuntut ilmu dan segenap Staf Sekretariat Jurusan Sains
dan Teknologi yang membantu dalam bidang administrasi dan
akademis.
7.
Teman tim TA, Ni Made Juliartuti dan Sevryadi yang telah
membantu dalam keadaan suka maupun duka.
8.
Teman-teman Teknik Elektro angkatan 2004.
9.
Semua pihak yang terlibat yang tidak dapat penulis sebutkan satu
demi satu, terima kasih atas dukungannya.
Penulis menyadari bahwa tulisan ini masi banyak terdapat kekurangan.
Sehingga keritik dan saran dari berbagai pihak penulis terima untuk perkembagan
selanjutnya. Semoga tulisan ini dapat bermanfaat bagi pembaca.
Yogyakarta, 2009
xii
HALAMAN PERSETUJUAN ... iii
HALAMAN PENGESAHAN ... iv
HALAMAN PERNYATAAN KEASLIAN KARYA ... v
HALAMAN PERSEMBAHAN DAN MOTTO ... vi
LEMBAR PERNYATAAN PERSETUJUAN PUBLIKASI KARYA
ILMIAH UNTUK KEPENTINGAN AKADEMIS ... vii
INTISARI ... viii
ABSTRACT ... ix
KATA PENGANTAR ... x
DAFTAR ISI ... xii
DAFTAR GAMBAR ... xv
DAFTAR TABEL ... xviii
BAB I PENDAHULUAN ... 1
1.1.
Judul ... 1
1.2.
Latar Belakang ... 1
1.3.
Tujuan dan Manfaat Penelitian ... 2
1.4.
Batasan Masalah ... 2
1.5.
Metodologi Penelitian ... 3
xiii
2.1.1. Sejarah singkat helikopter ... 6
2.1.2. Prinsip aerodinamik ... 6
2.1.3. Gaya – gaya yang berkerja pada helicopter saat terbang ... 14
2.1.4. Kesetimbangan dalam membelok ... 15
2.1.5.
Tail
boom
(Bagian belakang helikopter) ... 16
2.2.
PID Digital (
Proportional-Integral-Derivative
) ... 17
2.2.1. Metode Kurva Reaksi ... 18
2.2.2. Metode Osilasi ... 21
2.2.3. Definisi Penggolongan Tanggapan Transient ... 23
2.3.
Mikrokontroler ATMega 8535 ... 24
2.3.1
ADC (
Analog to Digital Converter
) ... 28
2.4.
Hall Effect
Sensor
... 30
2.5.
Potensiometer
... 33
2.6.
Teori Mekanik ... 35
2.5.1. Konversi
Gear
dan Perbandingan Kecepatan………... 35
2.5.2. Relay ... 35
BAB III PERANCANGAN
... 37
3.1.
Perancangan Plant ... 39
3.2.
Perancangan Set point ... 40
xiv
BAB IV HASIL DAN PEMBAHASAN ... 51
4.1. Model
Helikopter
...
51
4.2. Prinsip dan Cara Kerja Alat Keseluruhan ... 52
4.3. Pembahasan
Perubahan
Perancangan
...
55
4.3.1. Potensiometer Sebagai Sensor ... 55
4.3.2. Perubahan Nilai
Set Point
... 58
4.3.3 Perubahan Parameter ... 59
4.3.3.1 Cara Memperoleh Nilai Kp dan Kd ... 60
4.4. Analisa Perangkat Lunak ... 61
4.5. Hasil Pengujian Gerakan Sudut ... 64
4.5.1. Pengujian Terhadap Panjang Kabel Serial 1,5 Meter ... 65
4.5.2. Pengujian Terhadap Panjang Kabel Serial 3 Meter ... 67
4.5.3. Pengujian Terhadap Panjang Kabel Serial 10 Meter ... 69
4.6. Grafik Hasil Pengujian
Set Point
... 70
BAB V KESIMPULAN DAN SARAN ... 76
5.1. Kesimpulan ... 76
5.2. Saran ... 76
DAFTAR PUSTAKA ... 77
xv
dengan airfoilnya ... 7
Gambar 2.2. Tekanan statik dan tekanan dinamik pada suatu objek ... 9
Gambar 2.3. Tabung
venturi
... 10
Gambar 2.4. Garis arus
(streamlines)
di dalam tabung venturi ... 11
Gambar 2.5. Garis arus
(streamlines)
disekitar
airfoil
... 11
Gambar 2.6. Permukaan atas sayap ... 12
Gambar 2.7 Total tekanan pada permukaan atas sayap dan pada permukaan
bawah sayap ... 13
Gambar 2.8. Tekanan statik dan dinamik ... 13
Gambar 2.9. Tekanan dan aliran udara pada bidang angkat ... 14
Gambar 2.10. Pola aliran di sekitar
airfoil
... 14
Gambar 2.11. Kesetimbangan dalam membelok ... 15
Gambar 2.12. Bagian belakang helikopter ... 17
Gambar 2.13.
Block diagram
sistem dengan
feedback
... 17
Gambar 2.14. Respon tangga satuan (
step
) sistem... 18
Gambar 2.15. Kurva respon berbentuk S ... 19
Gambar 2.16 Sistem loop tertutp dengan alat kontrol roporsional ... 21
Gambar 2.17 Osilasi berkesinambungan dari periode P
cr... 22
xvi
Gambar 2.22. Hall Effect
Sensor
... 31
Gambar 2.23.
Pin out
Hall Effect
Sensor UGN3503U
... 33
Gambar 2.24.
Blok Diagram Rangkaian Internal UGN3503U
... 33
Gambar 2.25. Rangkaian pembagi tegangan ... 34
Gambar 2.26 Potensiometer ... 34
Gambar 2.27. Hubungan seri resistansi pada potensiometer ... 34
Gambar 3.1. Diagram Blok Perancangan Alat Secara Umum ... 37
Gambar 3.2.
Flow Chart
secara umum ... 39
Gambar 3.3.
Plant
yang digunakan ... 40
Gambar 3.4. Diagram alir pengecekan pilihan sudut ... 41
Gambar 3.5. Fungsional blok diagram efek hall ... 41
Gambar 3.6. Sensor sudut dengan efek hall ... 42
Gambar 3.7.
Flow chart
pembacaan keluaran sensor yang masuk pada
mikro ... 43
Gambar 3.8. Rangkaian driver motor... 44
Gambar 3.9. Rangkaian osilator ... 45
Gambar 3.10. Rangkaian sistem kendali ... 46
Gambar 3.11. Diagram alir proses mikro ... 46
Gambar 3.12. Diagram alir PID Digital ... 47
xvii
sudut yang terjadi, (c) Tampilan PC terhadap perubahan ... 53
Gambar 4.4. Perubahan Sudut (a) Set point putar kanan (CW),
(b) Set point putar kiri (CCW) ... 54
Gambar 4.5. Rangkaian Sensor
... 56
Gambar 4.6 perubahan tegangan dan posisi yang terjadi pada potensiometer 58
Gambar 4.7. Grafik pengujian pada
set point
45
°
ke kanan ... 70
Gambar 4.8. Grafik hasil pengujain pada
set point
90
°
ke kanan ... 71
Gambar 4.9. Grafik hasil pengujian pada
set point
135
°
ke kanan ... 72
Gambar 4.10. Grafik hasil pengujian pada
set point
45
°
ke kiri ... 73
Gambar 4.11. Grafik hasil pengujian pada pada
set point
90
°
ke kiri ... 73
xviii
Tabel 2.2. Aturan penyetelan Ziegler-Nicols Didasarkan pada penguatan
K
crdan periode P
crKritis (metode kedua) ... 22
Tabel 3.1. Karakteristik Ta = +25°C, Vcc = 5 V ... 42
Tabel 3.2. Mode operasi osilator kristal ... 45
Tabel 4.1. Tegangan yang dihasilkan sensor ... 56
Tabel 4.2 Hubungan sudut - tegangan... 57
Tabel 4.3
Data yang dihasilkan pada gerakan ke kanan dengan menggunakan
parameter PID ... 59
Tabel 4.4. Data yang dihasilkan pada gerakan ke kiri dengan menggunakan
parameter PID ... 60
Tabel 4.5. Data nilai Kp dan Kd dengan asumsi nilai Kp awal 0,4 ... 60
Tabel 4.6. Data yang dihasilkan pada gerakan ke kanan pada panjang kabel
serial 1,5 meter ... 65
Tabel 4.7. Data yang dihasilkan pada gerakan ke kiri pada panjang kabel
serial 1,5 meter ... 66
Tabel 4.8. Data yang dihasilkan pada gerakan ke kanan pada panjang kabel
serial 3 meter ... 67
Tabel 4.9. Data yang dihasilkan pada gerakan ke kiri pada panjang kabel
serial 3 meter ... 68
xix
1
1.1
Judul
Kendali Sudut Pada Model Helikopter Berbasis PD Digital
1.2
Latar Belakang
Dewasa ini, perkembangan teknologi sudah sangat pesat. Begitu pula pada
suatu mainan. Saat ini banyak mainan untuk anak – anak yang memiliki peralatan
yang praktis, canggih serta memiliki nilai kegunaan yang tinggi. Salah satu
kecanggihan mainan tersebut yaitu adanya suatu sistem pengendali jarak jauh
pada mainan helikopter.
Pada penelitian kali ini, untuk pengendalian helikopter digunakan kontrol
PD digital. Program untuk mengendalikan helikopter yang penulis buat
merupakan gerakan sudut pada helikopter.
Diharapkan alat yang dibuat ini dapat dijadikan salah satu alternatif pilihan
dalam banyak proses yang membutuhkan pengendalian jarak jauh tanpa kabel
dengan kemampuan pemantauan status beban.
1.3 Tujuan
Tujuan dari penelitian ini adalah:
1.
Mengaplikasikan pemrograman mikrokontroler 8535 dengan bahasa C untuk
mengendalikan gerakan sudut pada model helikopter.
2.
Dapat menghasilkan Model pengontrol gerak horisontal pada helikopter
dengan pengendali PD digital.
1.4 Manfaat
Manfaat yang dapat dicapai dari penelitian ini yaitu :
1.
Dapat mengetahui cara helikopter terbang secara umum dan perubahan sudut
secara khusus.
2.
Dapat memanfaatkan adanya medan magnet bumi untuk mengetahui arah
mata angin dan sudut yang dihasilkan oleh perubahan helikopter.
3.
Dapat mengetahui dan menggunakan program dari mikrokontroler 8535
4.
Tersedianya program untuk mengendalikan helikopter dengan
mikrokontroler berbasis PD digital.
1.5
Batasan Masalah
tidak berkembang menjadi lebih luas, maka perlu adanya batasan terhadap
permasalahannya. Batasan permasalahannya adalah sebagai berikut :
1.
Gerakan yang dibuat adalah gerakan sudut ketika helikopter sudah berada
pada ketinggian yang diinginkan di udara.
2.
Gerakan sudut yang digunakan adalah kanan (45˚, 90˚, 135˚) dan kiri (45˚,
90˚, 135˚).
3.
Digunakan sebuah potensiometer untuk mengetahui berapa derajat helikopter
bergerak.
4.
Proses pengendalian ini dapat dilakukan dengan jarak yang pendek, hal ini
dikarenakan efek dari sensor pemancar dan penerima.
5.
Proses pengendalian dan pemantauan menggunakan pemrograman
mikrokontroler 8535 dengan basis PD Digital.
1.6 Metodologi
Penelitian
Agar dapat melakukan perancangan alat dengan baik, maka penulis
membutuhkan masukan serta referensi yang didapatkan dengan metode :
1.
Studi kepustakaan yang mencakup literatur-literatur, gambar-gambar dan
manual.
2.
Mencari informasi dari berbagai media termasuk dari dunia maya (internet)
tentang sensor sudut.
3.
Melakukan dialog secara langsung dengan pembimbing tugas akhir.
4.
Melakukan penelitian, pengambilan data dan pengujian di laboraturium.
5.
Melakukan kunjungan ke perpustakaan dan toko – toko buku untuk bahasan
6.
Melakukan kunjungan langsung ke perpustakaan SMK Penerbangan
Angkasa Ardhya Garini Adisucipto Yogyakarta.
7.
Mencari informasi baik tentang helikopter maupun tentang teori –teori ke
teman – teman seperjuangan.
8.
Membuat perangkat keras berdasarkan perhitungan rangkaian yang telah
dibuat maupun rangkaian yang didapat dari
data sheet
. Sedangkan untuk
perangkat lunak didapat dari data – data yang diperoleh dengan
menggunakan program AVR.
9.
Melakukan pengetesan dari program yang telah dibuat.
10.
Pengambilan data baik pada motor maupun pada sensor.
11.
Pembuatan laporan, berdasarkan data – data yang sudah diperoleh dari proses
pengetesan program dengan
hardware
dan berdasarkan data yang sudah
diperoleh.
1.7 Sistematika
Penulisan
Sistematika penulisan laporan tugas akhir ini adalah sebagai berikut :
BAB I
: PENDAHULUAN
Bab ini berisi judul, latar belakang masalah, tujuan dan manfaat dari penelitian,
batasan masalah, metodologi penelitian, dan sistematika penulisan.
BAB II
: DASAR TEORI
BAB III : PERANCANGAN
Bab ini berisi perancangan dari kendali yang dibuat untuk memecahkan
permasalahan yang ada.
BAB IV : HASIL DAN PEMBAHASAN
Bab ini berisi hasil dari perancangan
hardware
dan
software
, pengambilan data,
penampilan data, pembahasan dan analisis hasil penelitian yang telah
dilaksanakan.
BAB V
: KESIMPULAN DAN SARAN
6
“
KENDALI SUDUT PADA MODEL HELIKOPTER BERBASIS
PID DIGITAL
” digunakan untuk mengendalikan helikopter pada jarak yang
sudah ditentukan. Dalam pengendalian helikopter ini, tentunya harus terlebih
dahulu mengetahui prinsip kerja dasar dan piranti atau komponen yang akan
digunakan.
2.1 Helikopter
[1]
2.1.1 Sejarah Singkat Helikopter
Helikopter adalah sebuah pesawat yang mengangkat dan terdorong oleh
satu atau lebih rotor (
propeller
) horizontal besar. Helikopter diklasifikasikan
sebagai
pesawat sayap-berputar
untuk membedakannya dari pesawat sayap-tetap
biasa lainnya. Kata helikopter berasal dari bahasa Yunani
helix
(spiral) dan
pteron
(sayap). Helikopter yang dijalankan oleh mesin diciptakan oleh penemu Slovakia
Jan Bahyl.
2.1.2 Prinsip – prinsip Aerodinamik
.
Pesawat terbang memerlukan suatu gaya angkat (
lift
) yang mampu
mengimbangi berat (
weight)
pesawat agar dapat mengudara. Gaya angkat tersebut
dihasilkan melalui suatu bidang angkat (
lifting surface
) yang dirancang
a.
Bidang Angkat.
Pesawat terbang bersayap tetap bidang angkatnya lebih di kenal
dengan sayap. Pada helikopter tidak dilihat adanya sayap seperti yang
terdapat pada pesawat bersayap tetap, tetapi bagian yang berputar lebih
dikenal dengan rotor yang berfungsi sebagai bidang angkatnya. Rotor
helikopter terdiri atas daun-daun rotor (
blades
).
Sayap maupun daun-daun rotor mempunyai penampang lintang
yang khas disebut
airfoil
. Bentuk seperti ini dimaksudkan agar bila
bidang angkat dilintasi udara dengan kecepatan tertentu akan mudah
menghasilkan reaksi aerodinamik berupa gaya angkat. Lihat gambar 2.1 :
Gambar 2.1 bidang angkat pesawat sayap tetap dan helikopter dengan airfoilnya.
b.
Gerak dan Kecepatan
Airfoil
Sayap maupun daun-daun rotor dengan penampang lintangnya
tidak begitu saja menghasilkan gaya angkat. Diperlukan suatu gerak
sekaligus kecepatan (v) bagi
airfoil
. Dengan demikian akan ada aliran
menjadi media bagi
airfoil
atau bidang angkat untuk mengembangkan
gaya-gaya aerodinamik.
Pada pesawat-pesawat bersayap tetap, diperlukan gerak maju
untuk menghasilkan kecepatan udara bagi bidang angkatnya. Gerak maju
tersebut umumnya dihasilkan melalui aksi
propeller
atau sistem propulsi
yang menghasilkan
thrust
(daya dorong).
Pada helikopter, rotornya tidak memerlukan gerak maju untuk
mendapatkan kecepatan, tetapi diperlukan suatu gerak putar bagi
rotornya sehingga didapat suatu kecepatan putar (U).
c.
Gerak Benda dan Udara
Di dalam aerodinamika terdapat gerak relatif, karena
kenyataannya dalam mempelajari sifat-sifat aerodinamik suatu benda
(objek) yang bergerak di udara, gerakannya bukan terhadap tanah
(
ground
), karena merupakan gerak absolut, tetapi gerak benda tersebut
adalah terhadap udara yang disebut dengan gerak relatif. Dengan
demikian, akan ada pula kecepatan relatif (
Relative velocities
).
Kecepatan relatif adalah kecepatan benda (objek) terhadap udara
atau kecepatan udara terhadap benda. Keduanya mempunyai besaran
yang sama tetapi berlawanan arah.
d.
Prinsip – prinsip Aliran Udara.
Prinsip – prinsip aliran udara meliputi 4 unsur, yaitu:
1.
Tekanan Statik
2.
Tekanan te
menimbulk
adalah sam
tidak ada re
Tekanan D
Uda
tambahan.
bergerak di
menyebabk
yang mem
besarnya
permukaan
Tekanan di
udara (v).
Tekanan di
Gam
ersebut diseb
kan tekanan
ma, jadi gaya
esultan gaya
Dinamik
ara yang
Hal ini d
itahan pada
kan suatu ta
maksanya terh
di atas te
n bidang kar
inamik terga
inamik :
mbar 2.2 Tekan
but tekanan s
n statik. Tek
anya untuk s
a.
bergerak a
dikarenakan
suatu bidang
ambahan tek
henti, sehin
ekanan atm
rena kecepat
antung pada
nan statik dan t
statik. Misal
kanan ini ak
setiap benda
akan memb
kecepatann
g permukaan
kanan terhad
gga tekanan
osfer. Tam
an udara dis
kerapatan u
tekanan dinam
lnya udara y
ksinya ke s
a adalah setim
berikan sua
nya. Jika u
n, maka ener
dap permuka
n pada bidan
mbahan teka
sebut tekana
udara (
ρ
) dan
ik pada suatu o
yang tenang
segala arah
mbang dan
atu energi
udara yang
rgi ini akan
3.
4.
Garis – gar
Dal
konsep aru
arus yang m
Aliran di d
Beb
suatu zat c
tabung.
Den
mengalir m
yang melin
tabung. Ma
A, dan kec
Prin
konstan. Pr
bentuk tabu
Massa alir
ris Arus Uda
lam banyak
us udara (
st
menggambar
dalam Tabun
berapa hal
air atau fluid
ngan prinsip
melalui tabun
ntas di setia
assa alir di
epatan alir a
nsip aliran
rinsip massa
ungnya.
= konstan, m
Gamba
ara.
k aspek a
treamlines
).
rkan lintasan
ng
yang pentin
da, dapat dia
p suatu aliran
ng pipa ada
ap bagian a
dalam tabun
adalah :
kontinyu in
a alir yang ko
maka
ar 2.3 Tabung v
erodinamik
Streamlines
n satu partik
ng yang be
amati dengan
n yang kontin
alah konstan
adalah sama
ng dengan lu
ni menyatak
onstan ini da
venturi
biasanya
s
adalah ga
el dari aliran
erkaitan den
n suatu alira
nyu, massa a
. Artinya m
a di setiap t
uas penampa
kan bahwa
apat diterapk
digunakan
aris – garis
n udara.
ngan aliran
an di dalam
aliran yang
massa fluida
titik dalam
ang tabung
(2-2)
A
vadalah
kan apapun
Jika dibuat garis – garis arus di dalam tabung venturi, akan
didapatkan bentuk seperti gambar 2-4:
Gambar 2.4 Garis arus (streamlines) di dalam tabung venture
Dari gambar di atas dapat di lihat bahwa di mana kecepatan
alirnya meningkat, maka garis arusnya adalah rapat. Prinsip inipun
dapat diterapkan jika aliran udara bukan di dalam tabung, tetapi
mengalir bebas di sekitar sayap. Dapat dilihat pada gambar 2.5.
Perhatikan pada bagian garis – garis yang arusnya merapat yang
terjadi pada bagian atas dari penampang sayap
(airfoil)
tersebut, hal
ini menunjukkan adanya peningkatan aliran pada daerah tersebut.
Gambar 2.5 Garis arus (streamlines) disekitar airfoil
Setiap aliran subsonik digambarkan dengan garis-garis arus,
daerah di mana garis arusnya makin merapat berarti pada daerah
tersebut terjadi kenaikan kecepatan, dan daerah di mana garis – garis
e.
Prin
dim
sehi
ditin
sesu
sepa
kece
teka
sepa
deng
ρ
ad
adal
Ketentuan
supersonik
nsip Bernoul
Bentuk
maksudkan u
ingga mengh
ngkatkan, m
uai dengan p
Prinsip
anjang arus
epatan udar
anan statik
anjang aliran
gan persama
Nilai y
dalah tekana
lah tekanan
ini tidak b
k.
lli
sayap ya
untuk mend
hasilkan teka
maka tekanan
prinsip Berno
p Bernoulli m
s alir tekan
a disuatu te
udara”. Kec
n udara pada
aan sebagai b
yang konstan
an statik (da
dinamis (dal
Gambar 2.
berlaku untu
ang cembu
dapatkan kec
anan udara r
n udara stat
oulli.
menyatakan
nan totalnya
empat selalu
cepatan dan
a permukaan
berikut:
n tersebut ad
alam hal in
lam hal ini =
.6 Permukaan a
uk aliran ud
ung pada
cepatan uda
rendah. Bila
tis akan men
bahwa, “pa
a akan teta
u akan diser
n tekanan u
n sayap atau
dalah tekana
i = energi p
= energi kine
atas sayap
dara dengan
permukaan
ara lokal y
a kecepatan u
njadi lebih
ada suatu al
ap, maka p
rtai dengan
udara pada s
blade
yang
an total (
tota
potensial) d
etik)
kecepatan
n atasnya
yang tinggi
udara lokal
kecil yaitu
iran udara,
eningkatan
penurunan
setiap titik
dinyatakan
(2-4)
al presure
),
an
Di sepanjang aliran jumlah energi potensial dan energi kinetik
adalah konstan. Ini berarti, semakin tinggi energi kinetik atau semakin
cepat sejumlah massa udara dipindahkan (mengalir) dari depan
kebelakang, maka akan semakin rendah energi potensialnya. Hal tersebut
berlaku pada permukaan atas maupun bawah dari sayap.
Gambar 2.7 Total tekanan pada permukaan atas sayap dan pada permukaan bawah sayap
Gambar 2.8 Tekanan statik dan dinamik
Rendahnya energi potensial di bawah tekanan atmosfer ini
merupakan suatu tekanan negatif, sehingga dapat memperbesar konstribusi
terjadinya gaya angkat.
Semakin cepat mengalirnya sejumlah massa udara dipermukaan
atas
airfoil
sayap, maka akan semakin besar gaya angkat yang terjadi.
Tekanan negatif statik yang besar dihasilkan pada permukaan. Bidang
bidang angkat
(lift).
Sedangkan sisanya dihasilkan oleh tekanan dinamik
pada permukaan tekanan sayap.
Berikut ini adalah gambaran aliran udara dan tekanan udara yang
terjadi pada bidang angkat ketika pesawat sedang terbang.
Gambar 2.9 Tekanan dan aliran udara pada bidang angkat
f.
Pola Aliran Udara di Sekitar
Airfoil
Pola aliran di sekitar
airfoil
dapat dilihat pada gambar – gambar
berikut ini:
Gambar 2.10 Pola aliran di sekitar airfoil
2.1.3 Gaya – gaya yang bekerja pada helikopter saat terbang
Helikopter tidak membutuhkan landasan pacu seperti pesawat terbang
karena helikopter dapat terangkat lurus ke atas dan mendarat kembali ke titik yang
sama. Cara terbang helikopter sama dengan pesawat terbang, tetapi helikopter
b
2
s
s
d
b
g
b
Ada
bekerja pada
1
2
3
2.1.4 Keseti
Di d
sentrifugal F
side slipping
disc
dimirin
belokan (gam
Kom
gaya sentrifu
belokannya
tiga gaya ya
a saat heliko
1.
Berat hel
2.
Resultant
gerakan
(
aerodyn
3.
Lift
F
Nrotation p
imbangan d
dalam kond
Fc. Jika tida
g
(menggese
gkan dengan
mbar 2.11)
mponen gaya
fugal Fc. Sem
(R).
ang bekerja p
pter terbang
likopter ,
m
t gaya hamb
pesawat.
amic center
)
yang menan
plane
dalam Memb
disi membe
ak diimbang
er ke sampin
n cara memi
a
(hasil
makin tinggi
pada saat he
g, yaitu:
menangkap d
bat (
drag
) F
F
xmena
) helikopter.
ngkap di p
belok
elok, gaya
gi akan men
ng). Untuk m
iringkan
roto
l dari memi
i kecepatan
elikopter terb
di titik berat
F
xyang ber
angkap di
pusat rotor,
baru akan
ngakibatkan
mengimbang
or disc
secar
iringkan
roto
maju v akan
bang. Ketiga
;
rlawanan ar
pusat ae
tegak luru
muncul, y
helikopter m
gi Fc, sekali
ra lateral kea
or disc
) me
n semakin b
a gaya yang
rah dengan
erodinamik
s terhadap
yaitu gaya
mengalami
i lagi
rotor
arah dalam
engimbangi
d
t
2
h
b
D
D
P
J
Deng
dengan pang
terbalik deng
2.1.5
Tail B
Tail
helikopter b
barang-baran
Dari keseimb
Dari kesetim
Perbandingan
Jadi
gan demikia
gkat dua ke
gan besar ra
oom
(Bagia
boom merup
besar ruanga
ng.
Gambar 2bangan gaya
mbangan gaya
n
dan
an, sudut ke
ecepatan hel
dius belokan
an Belakang
pakan bagian
an di dalam
.11 Kesetimba
a-gaya vertik
a-gaya horiz
diperoleh :
emiringan l
licopter pad
n.
g Helikopter
n utama dar
tail boom
d
angan dalam m
kal :
zontal :
ateral disc
da saat mem
r)
ri bagian bel
dimanfaatkan
membelok
( ) berban
mbelok dan b
akang heliko
n untuk peny
Salah satu komponen yang dipasang pada
tail boom
adalah batang kemudi
rotor belakang (
Tail Rotor Kontrol Rod
). Batang kemudi rotor belakang (
tail
rotor
) dibuat dari pipa alumunium paduan yang berfungsi untuk menghubungkan
pedal kemudi yang selalu diinjak oleh penerbang dengan rotor belakang. Apabila
penerbang menginjak pedal kemudi, tenaga ini oleh batang kemudi diteruskan ke
rotor belakang dan ini berarti mengubah sudut
pitch rotor
belakang yang
fungsinya untuk mengubah arah penerbangan yaitu belok ke kanan atau ke kiri.
Gambar 2.12 Bagian belakang helikopter
2.2
PID Digital (
Proportional-Integral-Derivative
)
[2]
Masukan blok proses dalam sebuah sistem adalah keluaran dari blok
kontrol sedangkan untuk faktor koreksi dilakukan umpan balik (
feedback
) nilai
output
. Secara sederhana,
block diagram
untuk sebuah sistem dengan umpan balik
digambarkan pada gambar 2.13.
Gambar 2.13 Block diagram sistem dengan feedback
Mode Kontrol
proses
feedback
Set point
e (t)
u (t)
Output
k
n
a
p
s
o
k
s
2
d
t
d
k
s
s
I
kontrol adal
nilai yang di
adalah sebag
O
plant.
Peran
satunya ada
oleh pada ta
kurva reaks
sistem untai
2.2.1 Metod
D
dari sistem t
tidak menca
dominan, m
kurva berbe
sistem diber
sistem ini ak
Input
blok k
ah
manipula
iinginkan. Ji
gai berikut:
Output
dari
ncangan kon
alah metode
ahun 1942. M
i dan meto
terbuka (
op
de Kurva Re
Dalam meto
terhadap mas
akup integra
maka kurva
entuk-S, sep
ri masukan
kan berbentu
Gamkontrol meru
ated variable
ika dalam ha
kontroler ak
ntroler PID d
Ziegler-Nic
Metode Zieg
de osilasi. M
en-loop
).
eaksi
[3]
de pertama,
sukan tangg
ator maupun
respon sebu
perti diperlih
sinyal u(t)
uk S.
mbar 2.14 Res
upakan
kontr
e u(t)
yang t
al ini dipakai
kan dihubun
dapat dibagi
chols. Metod
gler-Nichols
Metode kur
,secara eksp
a-satuan, sep
n nilai – nila
uah tangga
hatkan pada
berupa fun
spon tangga sat
Sistem
rol error
ata
telah mengo
i kontroler P
ngkan pada p
i menjadi b
de ini diperk
s memiliki d
rva reaksi d
perimental r
perti pada ga
ai kutub pas
satuan mun
gambar 2.1
ngsi tangga
tuan (step) sist
au
e(t).
Kel
lah nilai
err
PID maka alg
peralatan ya
eberapa met
kenalkan pe
dua cara, ya
didasarkan p
respons dapa
ambar 2.14.
sangan komp
ngkin keliha
15. Pada m
satuan (
step
tem
uaran blok
ror
menjadi
goritmanya
(2-14)
ang disebut
tode, salah
ertama kali
aitu metode
pada reaksi
at diproleh
jika sistem
pleks yang
atan seperti
metode ini,
Kurva output dari sistem ini kemudian akan digunakan untuk mencari
konstanta-konstanta yang akan dipakai untuk penalaan parameter PID. Konstanta
yang dibutuhkan adalah
dead time
(waktu mati) dan waktu tunda. Waktu mati
disimbolkan dengan L dan waktu tunda disimbolkan dengan T. Penentuan kedua
konstanta tersebut digambarkan pada gambar 2.15.
Gambar 2.15 Kurva respon berbentuk S
Dari gambar 2.15 terlihat bahwa kurva reaksi berubah naik setelah
selang waktu L. Sedangkan, waktu tunda menggambarkan perubahan kurva
setelah mencapai 66% dari keadaan mantapnya. Pada kurva dibuat suatu garis
yang bersinggungan dengan garis kurva. Garis singgung itu akan memotong
sumbu absis dan garis maksimum. Perpotongan garis singgung dengan sumbu
absis ini merupakan ukuran waktu mati dan perpotongan dengan garis maksimum
merupakan ukuran waktu tunda.
L T
66%
t
K
p
m
w
d
d
d
b
Z
penalaan par
merupakan r
Tabel 2.1 Pe
Tipe alat k
P
PI
PID
Kara
waktu tunda
dengan men
dan menent
,
dengan siste
Z
berdasarkan
Ziegler dan
rameter PID
rumusan pen
enalaan paramekontrol
akteristik kur
a
L
dan ko
nggambarkan
tukan perpo
seperti dipe
em orde perta
Ziegler dan
rumus yang
n Nichols
D berdasarka
nalaan param
eter PID denga
K
prva berbentu
nstanta wak
n garis singg
otongan gari
erlihatkan pa
ama dengan
Nichols m
g diperlihatk
melakukan
an pada pero
meter PID de
an metode kurv
uk-S dapat d
ktu tunda
T
gung pada t
is singgung
ada gambar
keterlambat
menyarankan
an pada tabe
eksperime
olehan kostan
engan metod
va reaksiT
i∞
2L
diberikan ole
T
dan konsta
titik perubah
dengan sum
2.15.
tan transport
penyetelan
el 2.1.
en dan me
nta
T
dan
L
de kurva reak
T
0
0
0,5
eh dua konst
anta waktu
han kurva b
mbu waktu
dap
t
n nlai K
p, T
enyarankan
. Tabel 2.1
ksi.
T
d0
0
5L
anta, yakni
ditentukan
erbentuk-S
dan garis
at didekati
(2-15)
Z
S
n
2
A
Ziegler-Nich
17)
Sehingga, al
nol pada
2.2.2 Metod
M
Dalam m
menggun
menamb
memiiki
berkesin
ini tidak
ditentuka
Nichols
rumus ya
r(t
Alat kontrol
hols member
lat kontrol P
.
de Osilasi
Metode kedu
metode kedu
nakan tindak
bahkan K
pda
osilasi yan
nambungan u
k berlaku).
an secara ek
menyaranka
ang diperliha
+
-
t)
l PID yang
rikan:
PID memilik
ua dari met
ua ini, mula
kan kontrol
ari 0 ke suat
g berkesinam
untuk nilai K
Jadi, pengu
ksperimen, (
an penyetela
atkan pada t
K
pu
g disepadank
ki suatu nilai
tode Nikols
a – mula di
proporsiona
tu nilai kriti
mbungan (ji
K
pmaupun y
uatan kritis
(dapat diliha
an nilai para
tabel 2.2.
u(t)
kan oleh m
kutub pada
– Ziegler a
set
T
i=
∞
al (ditunjukk
s K
cr, disini
ika keluaran
yang boleh
K
crdan per
at pada gam
ameter K
p, T
Sistem
metode perta
titik asal da
adalah meto
∞
dan T
d=
kan pada gam
mula – mul
n tidak mem
diambil, ma
riode Pcr y
mbar 2.17). Z
T
i, dan T
db
c(t)
ama aturan
(2-16)
(2-18)
an dua nilai
d
d
b
m
s
i
l
Tabel 2.2 Kritis (meTipe
Semu
diferensial d
dinaikkan b
berosilasi. M
memiliki res
K
sistem diskr
interval pad
langsung dip
Gamb G Aturan penye etode kedua)alat kontrol
P
PI
PID
ula parame
diatur nol (
bertahap hin
Metode osi
spon cepat.
Kontroler di
rit. Pada ko
da pengamb
proses untuk
c(t)
0
bar 2.16 Sistem
Gambar 2.17 O etelan Ziegler-N
K
peter integra
(Ti = ~ ;
ngga mencap
ilasi sering
igital bukan
ontroler digi
bilan
sampl
k mendapatk
m loop tertutup
Osilasi berkesin Nicols Didasar
ator diatur
Td = 0). P
pai harga y
digunakan
n mengguna
ital ukuran
le
. Setiap
an keluaran
dengan alat ko
nambungan da rkan pada pen
T
i∞
tak berhi
Parameter p
ang mengak
untuk me
akan sistem
error hanya
perubahan
yang diingin
P
cr ontrol proporsiari periode Pcr
guatan Kcr da
T
d0
0
ngga dan
proporsional
kibatkan rea
erancang sis
m kontinyu,
a terukur set
yang diper
nkan.
t
ional
an periode Pcr
p
a
D
M
2
t
2
K
perhitungan
adalah untuk
Dengan :
Untu
Menjadi :
2.2.3 Defini
Kara
tangga satua
1.
Waktu t
mencapa
2.
Waktu n
dari 10%
akhir ya
biasa dig
Karena data
data yang
k setiap
samp
uk menyeder
isi Penggolo
akteristik tan
an (gambar 2
tunda (Td) m
ai setengah n
naik (Tr) me
% menjadi 9
ang biasa di
gunakan 10%
E(n+1) adal
akan datang
ple
waktu m
rhanakan nila
ongan Tangg
nggapan tran
2.18), dapat d
merupakan w
nilai akhir un
erupakan wa
90%, 5% me
igunakan. U
% menjadi90
lah data yang
g digunakan
maka persama
ai sigma :
gapan Tran
nsient suatu
dikelompokk
waktu yang
ntuk waktu p
aktu yang dip
enjadi 95%,
Untuk sistem
0%.
g berikutnya
n data yang
aan diskrit d
nsient
[3]
sistem kon
kan sebagai
diperlukan
pertama.
perlukan ole
atau 0% m
m atas renda
a belum ters
g saat ini E(
dapat ditulis
ntrol terhadap
berikut :
oleh tangga
eh taggapan
enjadi 100%
aman waktu
edia, maka
(n). Jika n
:
p masukan
apan untuk
untuk naik
% dari nilai
3
4
5
2
d
b
3.
Waktu p
mencapa
4.
Maksimu
diukur d
satu bias
Besarnya
5.
Waktu tu
mencapa
disederh
Waktu tu
G2.3 Mikroko
M
dan memor
beberapa je
C
puncak (Tp
ai puncak pe
um (persen)
dari satuan. A
sanya diguna
a
overshoot
urun (Ts) w
ai dan tet
hanakan deng
urun tadi dih
ambar 2.18 K
ontroler AT
Mikrokontro
ri program
enis mikroko
C (t)
Mp
1
0,5
0
Tr
Tp
Ts
p) merupaka
ertama
oversh
)
overshoot,
Apabila nilai
akan persen
t
maksimum
aktu yang d
tap berada
gan presenta
hubungkan d
Kurva tanggapan
TMega 8535
ler adalah su
(ROM) ser
ontroler yan
Toleran
an waktu y
hoot.
Mp merupa
i akhir kead
overshoot
m
m menunjukk
diperlukan un
dalam gu
asi mutlak ha
dengan tetap
n tangga satuan
5
[8]
uatu keping
rta memori
ng memiliki
nsi yang diperb
yang diperlu
akn nilai pu
daan tunak t
maksimum d
kan kestabila
ntuk menang
ugus nilai
arga akhir (b
pan waktu te
n menunjukkan
IC dimana t
serbaguna
i fasilitas A
bolehkan
ukan tangga
uncak kurva
tanggapanny
dan didefinis
an relatif dar
ggapi kurva
akhir uku
biasanya 2%
erbesar sistem
n td, tr, tp, Mp, d
terdapat mik
(RAM), b
ADC, PLL,
t
0,05 atau 0,02apan untuk
tanggapan
ya jauh dari
sikan oleh:
ri sistem.
agar dapat
uran yang
% atau 5%).
m kontrol.
dan ts
kroprosesor
ahkan ada
dalam satu kemasan. Penggunaan mikrokontroler dalam bidang kontrol sangat
luas dan populer.Ada beberapa vendor yang membuat mikrokontroler diantaranya
Intel, Microchip, Winbond, Atmel, Philips, Xemics dan lain - lain. Dari beberapa
vendor tersebut, yang paling populer digunakan adalah mikrokontroler buatan
Atmel.
Mikrokontroler AVR (Alf and Vegard’s Risc prosesor) memiliki
arsitektur RISC 8 bit, di mana semua instruksi dikemas dalam kode 16-bit (16-bits
word) dan sebagian besar instruksi dieksekusi dalam 1 (satu) siklus clock, berbeda
dengan instruksi MCS 51 yang membutuhkan 12 siklus clock. Tentu saja itu
terjadi karena kedua jenis mikrokontroler tersebut memiliki arsitektur yang
berbeda. AVR berteknologi RISC (Reduced Instruction Set Computing),
sedangkan seri MCS 51 berteknologi CISC (Complex Instruction Set Computing).
Secara umum, AVR dapat dikelompokkan menjadi 4 kelas, yaitu keluarga ATtiny,
keluarga AT90Sxx, keluarga ATMega dan AT86RFxx. Pada dasarnya yang
membedakan masing – masing kelas adalah memori, peripheral, dan fungsinya.
Dari segi arsitektur dan instruksi yang digunakan, mereka bias dikatakan hampir
sama. Oleh karena itu, dipergunakan salah satu AVR produk Atmel, yaitu
ATMega8535. Selain mudah didapatkan dan lebih murah ATMega8535 juga
memiliki fasilitas yang lengkap. Untuk tipe AVR ada 3 jenis yaitu AT Tiny, AVR
klasik, AT Mega. Perbedaannya hanya pada fasilitas dan I/O yang tersedia serta
fasilitas lain seperti ADC,EEPROM dan lain sebagainya. Salah satu contohnya
adalah AT Mega 8535. Memiliki teknologi RISC dengan kecepatan maksimal 16
51. Dengan fasilitas yang lengkap tersebut menjadikan ATMega8535 sebagai
mikrokontroler yang powerfull. Adapun blok diagramnya adalah sebagai berikut.
Gambar 2.19 Blok Diagram ATMega8535
Dari gambar 2.19 dapat dilihat bahwa ATMega8535 memiliki bagian
sebagai berikut:
1. Saluran I/O sebanyak 32 buah, yaitu Port A, Port B, Port C, dan Port D.
2. ADC 10 bit sebanyak 8 saluran.
3. Tiga buah Timer/Counter dengan kemampuan pembandingan.
4. CPU yang terdiri atas 32 buah register.
5. Watchdog Timer dengan osilator internal.
6. SRAM sebesar 512 byte.
7. Memori Flash sebesar 8 kb dengan kemampuan Read While Write.
8. Unit interupsi internal dan eksternal.
9. Port antarmuka SPI.
11. Antarmuka komparator analog.
12. Port USART untuk komunikasi serial.Fitur ATMega8535
Kapabilitas detail dari ATMega8535 adalah sebagai berikut:
1. Sistem mikroprosesor 8 bit berbasis RISC dengan kecepatan maksimal 16 Mhz.
2. Kapabilitas memory flash 8KB,SRAM sebesar 512 byte,dan
EEPROM(Electrically Erasable Programmable Read Only Memory) sebesar
512 byte.
3. ADC internal dengan fidelitas 10 bit sebanyak 8 channel.
4. Portal komunikasi serial (USART) dengan kecepatan maksimal 2,5 Mbps.
5. Enam pilihan mode sleep menghemat penggunaan daya listrik.
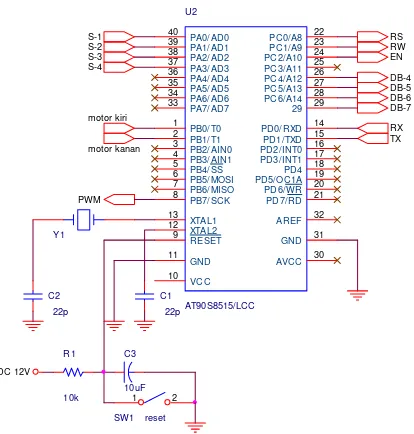
Konfigurasi Pin ATMega8535 Konfigurasi pin ATMega8535 bisa
dilihat pada gambar. Dari gambar tersebut dapat dijelaskan secara fungsional
konfigurasi pinATMega8535 sebagai berikut:
1. VCC merupakan pin yang berfungsi sebagai pin masukan catu daya.
2. GND merupakan pin ground.
3. Port A (PA0..PA7) merupakan pin I/O dua arah dan pin masukan ADC.
4. Port B (PB0..PB7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu
Timer/Counter, komparator analog, dan SPI.
5. Port C (PC0..PC7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu
TWI, komparator analog dan Timer Oscillator.
6. Port D (PD0..PD7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu
komparator analog, interupsi eksternal, dan komunikasi serial.
8. XTAL1 dan XTAL2 merupakan pin masukan clock ekstenal.
9. AVCC merupakan pin masukan tegangan untuk ADC.
10. AREF merupakan pin masukan tegangan referensi ADC.
Untuk memprogram mikrokontroler dapat menggunakan bahasa assembler
atau bahasa tingkat tinggi yaitu bahasa C. Bahasa yang digunakan memiliki
keunggulan tersendiri, untuk bahasa assembler dapat diminimalisasi penggunaan
memori program sedangkan dengan bahasa C menawarkan kecepatan dalam
pembuatan program. Untuk bahasa assembler dapat ditulis dengan menggunakan
text editor setelah itu dapat dikompilasi dengan tool tertentu misalnya asm51
untuk MCS51 dan AVR Studio untuk AVR.
2.3.2 ADC (
Analog to Digital Converter
)
Pada mikrokontroler ini telah disediakan ADC internal dengan fitur:
1.
Resolusi 10-bit
2.
0.5 LSB Integral tidak linier.
3.
Ketepatan mutlak ±2 LSN
4.
Waktu konversi 65-260 µs.
5.
Delapan kanal masukan.
6.
Selang tegangan masukan dari 0 sampai VCC.
7.
Memiliki tegangan referensi internal sebesar 2.56V.
8.
Dapat bekerja secara
free running
atau saat diperlukan saja.
9.
Mulai mengkonversi dengan trigger otomatis pada sumber
interupsi.
Proses inisialisasi ADC meliputi proses penentuan
clock
ADC,
pemilihan saluran tegangan referensi, fomat keluaran data dan mode pembacaan.
Register yang menangani ADC internal adalah register ADMUX (
ADC
Multiplexer Selection Registetr
) berfungsi menentukan tegangan referensi ADC,
format data keluaran, dan pemilihan jalur masukan, komponen register ini dapat
dilihat pada gambar 2.20. Register SFIOR (
Special Function IO Register
)
berfungsi untuk mengatur sumber picu konversi ADC, komponen register ini dapa
dilihat pada gambar 2.21. Register ADCSRA (
ADC Kontrol and Status Register
A
) berfungsi melakukan menajemen sinyal
kontrol
dan status dari ADC.
Gambar 2.20 Komponen register ADMUX
REFS(1:0) (
Reference Selection Bits
) digunakan sebagai pemilih
sumber tegangan referensi dari ADC, ADLAR (
ADC Left Adjust Result
)
digunakan untuk menentukan konfigurasi isi dari register ADCH dan ADCl
sebagai tempat menyimpan hasil konversi.
ADTS(2:0) (ADC
Auto Trigger Source
) untuk menentukan mode dari
ADC yang digunakan. ADEN (ADC
Enable
) berfungsi untuk mengaktifkan ADC
jika bernilai satu jika ingin memulai konversi. ADATE (ADC
Auto Trigger
Enable
), berhubungan dengan bit (ADTS) pada register SFIOR. Jika bernilai satu
menyebabkan
trigger
otomatis akan aktif. ADIF (ADC
Interrupt Flag
) bit ini
akan aktif, jika konversi telah selesai dan dapat memicu interupsi, selama fasilitas
Jika ADIE (
ADC Interrupt Enable
) berniali 1 dan bit I pada SREG 1
dan terjadi picuan dari bit ADIF, maka rutin interupsi ADC akan dilanjutkan.
ADPS(2:0) (
ADC Prescalar Select Bits
) mendefenisikan factor pambagi dari
sumber clock ADC.
Resolusi untuk 10-bit ADC dapat di hitung dengan persamaan :
; n= resolusi ADC
Pemilihan konfigurasi ADLR :
Gambar 2.21 Komponen register SFIOR
2.4
Hall Effect
Sensor
[6]
Hall effect
sensor merupakan sensor yang digunakan untuk mendeteksi
medan magnet.
Hall Effect
sensor akan menghasilkan sebuah tegangan yang
proporsional dengan kekuatan medan magnet yang diterima oleh sensor tersebut.
Pendeteksian perubahan kekuatan medan magnet cukup mudah dan
tidak memerlukan apapun selain sebuah induktor yang berfungsi sebagai sensor.
Kelemahan dari detektor dengan menggunakan induktor adalah kekuatan medan
magnet yang statis (kekuatan medan magnet yang tidak berubah) tidak dapat
dideteksi.
Oleh sebab itu diperlukan cara yang lain untuk mendeteksi kuat medan
magnet statis yaitu dengan sensor yang dinamakan dengan ‘
hall effect
’ sensor.
Sensor ini terdiri dari sebuah lapisan silikon yang berfungsi untuk mengalirkan
arus listrik.
Gambar 2.22 Hall Effect Sensor
Sensor
hall effect
ini hanya terdiri dari sebuah lapisan silikon dan dua
buah elektroda pada masing-masing sisi silikon. Hal ini akan menghasilkan
perbedaan tegangan pada output ketika lapisan silikon ini dialiri oleh arus listrik.
Tanpa adanya pengaruh dari medan magnet maka arus yang mengalir pada silikon
tersebut akan tepat di tengah-tengah silikon dan menghasilkan tegangan yang
sama antara elektrode sebelah kiri dan elektrode sebelah kanan sehingga
menghasilkan beda tegangan 0 volt pada output.
Ketika terdapat medan magnet mempengaruhi sensor ini maka elektron
yang mengalir akan berbelok mendekati/menjauhi sisi yang dipengaruhi oleh
kanan
medan magnet. Ketika elektron yang melalui lapisan silikon tersebut mendekati
sisi silikon sebelah kiri maka terjadi ketidakseimbangan tegangan output dan hal
ini akan menghasilkan sebuah beda tegangan.
Semakin besar kekuatan medan magnet yang mempengaruhi sensor ini
akan menyebabkan pembelokan elektron di dalam lapisan silikon ini akan
semakin besar dan semakin besar pula ketidakseimbangan tegangan antara kedua
sisi lapisan silikon pada sensor. Semakin besar ketidakseimbangan tegangan ini
akan menghasilkan beda tegangan yang semakin besar pada output sensor ini.
Arah pembelokan arah arus pada lapisan silikon ini dapat digunakan
untuk mengetahui polaritas kutub medan
hall effect
sensor ini. Sensor
hall effect
ini dapat bekerja jika hanya salah satu sisi yang dipengaruhi oleh medan magnet.
Jika kedua sisi silikon dipengaruhi oleh medan magnet maka arah arus tidak akan
dipengaruhi oleh medan magnet itu. Oleh sebab itu jika kedua sisi silikon
dipengaruhi oleh medan magnet yang mempengaruhi magnet maka tegangan
outputnya tidak akan berubah.
Sensor yang digunakan di dalam proyek ini adalah sensor UGN3503U.
Sensor ini akan menghasilkan tegangan yang proporsional dengan kekuatan
medan magnet yang dideteksi oleh sesnor ini. Selain itu komponen ini dipilih
karena relatif murah, mudah digunakan dan mempunyai performa yang cukup
baik. Sensor UGN3503 ini mempunyai 3 pin antara lain :
Pin 1 : VCC, pin tegangan suplai
Pin 2 : GND, pin ground
Gambar 2.23 Pin outHall Effect Sensor UGN3503U
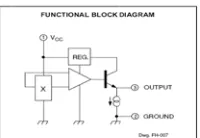
Di dalam sensor ini sudah dibangun sebuah penguat yang memperkuat
sinyal dari rangkaian sensor dan menghasilkan tegangan output di tengah-tengah
tegangan suplai.Pada sensor ini jika mendapat pengaruh medan magnet dengan
polaritas kutub utara maka akan menghasilkan pengurangan pada tegangan output
sebaliknya jika terdapat pengaruh medan magnet dengan polaritas kutub selatan
maka akan menghasilkan peningkatan tegangan pada outputnya. Sensor ini dapat
merespon perubahan kekuatan medan magnet mulai kekuatan medan magnet yang
statis maupun kekuatan medan magnet yang berubah-ubah dengan frekuensi
sampai 20KHz.
Gambar 2.24 Blok Diagram Rangkaian Internal UGN3503U
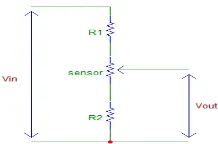
2.5 POTENSIOMETER
[4]
Dalam kontrol posisi, letak suatu obyek diterjemahkan menjadi besaran
listrik yang dapat dimengerti oleh sistem. Rangkaian yang sering dipakai adalah
rangkaian pembagi tegangan (
voltage divider
). Rangkaian ini memiliki keluaran
berupa tegangan. Rangkaian pembagi tegangan yang sederhana dapat
Pada
pembagian
resistansi.
pada saat
tidak dapa
Secara sed
yang disu
maksimum
gambar 2.2
Ga gambar 2
n tegangan
R1 dan R2
Rsensor me
at bekerja d
derhana, pote
sun secara
m. Pada gam
26 menunjuk
Gambar
Gambar 2.25 R
2.25, nilai
input (Vin
2 merupaka
encapai nilai
dengan baik
ensiometer d
seri. Hasil j
mbar 2.26 d
kkan hubung
Gambar
2.27 Hubunga
Rangkaian pem
tegangan k
n) yang did
an resistansi
i ekstrim. D
maka yang
dapat dianalo
jumlahan re
digambarkan
gan seri resis
r 2.26 Potensi
an seri resistan
mbagi tegangan
keluaran (Vo
dasarkan pad
pengaman
alam hal ini
digunakan
ogikan seba
esistansi ters
bentuk
pot
stansi pada
p
ometer
nsi pada potens n
out) merup
da perbandi
yang memb
i, apabila se
adalah pote
gai dua buah
sebut merup
tensiometer
potensiomete
siometerakan hasil
ingan nilai
batasi arus
ensor sudut
ensiometer.
h resistansi
pakan nilai
sedangkan
Berdasarkan gambar 2.27, dapat diketahui persamaan nilai tegangan
keluaran (Vout) dari perbandingan nilai resistansi RL dan RH, yaitu :
Vout =
RH
RL
RL
+
x Vin
(2-26)
2.6 TEORI MEKANIK
[7]
Yang dimaksud dengan teori mekanik pada alat ini adalah teori
mekanika yang ditunjang oleh elektronika dan berhubungan dengan alat ini.
Pembahasan teori mekanik ini dibatasi hanya seputar konversi
gear
dan
perbandingan kecepatan saja.
2.5.1 Konversi
Gear
dan Perbandingan Kecepatan
Dalam desain konversi antara dua buah
gear
, maka hal yang perlu
diperhatikan adalah persamaan (rumus) yang melandasinya. Dalam persamaan
konversi gear dan perbandingan kecepatan yang dihasilkan terdapat 2 (dua)
parameter yang harus diketahui, yaitu kecepatan putar roda utama (obyek yang
digerakkan) yang diinginkan dan rpm (rotasi per menit) dari motor yang
digunakan.
2.5.2 Relay
Relay merupakan rangkaian yang bersifat elektronis sederhana dan
tersusun oleh :
•
saklar
•
poros besi
Cara kerja komponen ini dimulai pada saat mengalirnya arus listrik
melalui koil,lalu membuat medan magnet sekitarnya merubah posisi saklar
komponen sederhana ini yaitu dengan bentuknya yang minimal bisa menghasilkan
arus yang lebih besar
Komponen sederhana ini dalam perkembangannya digunakan (
atau
pernah digunakan) sebagai komponen dasar berbagai perangkat elektronika,lampu
kendaraan bermotor,jaringan elektronik, televisi, radio, bahkan pada tahun 1930an
pernah digunakan sebagai perangkat dasar komputer yang keberadaannya kini
digantikan oleh mikroprosesor seperti IntelCorp.dan AMD. Semua itu karena
pemakaian relay mempunyai Keuntungan yaitu ;
•
Dapat mengontrol sendiri arus serta tegangan listrik yang diinginkan
•
Dapat memaksimalkan besarnya tegangan listrik hingga mencapai batas
maksimalnya
•
Dapat menggunakan baik saklar maupun koil lebih dari satu, disesuaikan
37
Secara garis besar pengendalian sudut
pada model helikopter terdiri
dari 2 bagian, yaitu bagian perangkat keras dan bagian perangkat lunak. Bagian
perangkat keras terdiri atas
interfacing
mikrokontroler ATMega8535 dengan
input
dan
output
serta mekanik pada model helikopter. Bagian perangkat lunak berupa
program di dalam ATMega8535 dengan kontrol PID Digital untuk menangani
input
dan
output
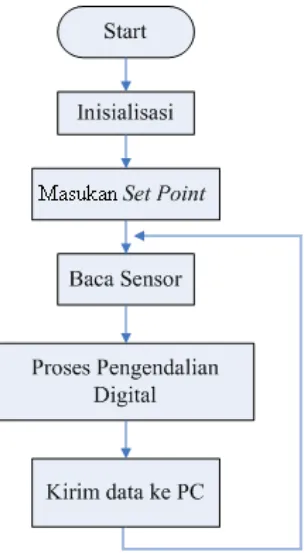
. Diagram blok perancangan alat secara umum ditunjukkan pada
gambar 3.1
Gambar 3.1 Diagram Blok Perancangan Alat Secara Umum
Pada gambar 3.1, dapat dilihat terdapat dua bagian yaitu, bagian 1
dikerjakan oleh Ni Made Juliartuti. Sehingga pada perancangan ini hanya akan
dibahas pada bagian 2 saja.
Mikrokontroler
Atmega8535
Set
Point
Rx
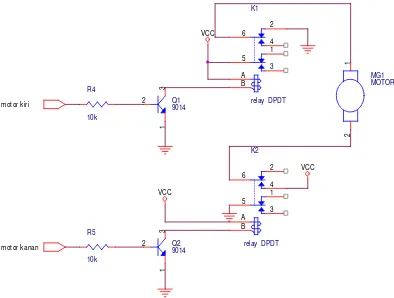
Driver
Motor
Potensiometer
Tx
Plant
PC
Cara kerja blok diagram di atas adalah :
1.
Pada PC (
Personal Computer
) terlebih dahulu sistem diaktifkan,
dengan demikian model helikopter mengirim data tentang
keberadaan posisi helikopter itu sendiri.
Set Point
yang diterima
oleh Rx akan diterima oleh mikro yang nantinya akan dikendalikan
oleh PID Digital.
2.
Data akan diolah oleh mikrokontroler ATMega 8535 pada setiap
interupsi yang diterima. Keluaran dari mikro akan masuk ke
driver
motor. Rangkaian
driver
menggunakan rangkaian transistor dan
relay 5V agar terhindar dari terbakarnya motor jika menggunakan
driver
motor DC. Dengan demikian model helikopter mulai bekerja
sesuai perintah yang diinginkan.
3.
Sensor akan mengecek apakah data yang dihasilkan sudah sesuai
dengan
set point
. Ketika data sama dengan
set point
, sensor akan
mengirim interupsi ke mikrokontroler yang kemudian motor akan
mengembalikan gerakan motor pada keadaan semula.
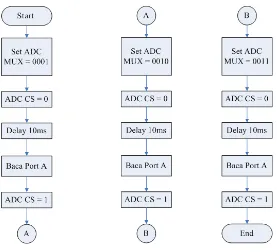
Keluaran sudut masih berupa analog yang nantinya akan dimasukkan
ke dalam ADC yang sudah terdap