34
BAB 4
HASIL DAN PEMBAHASAN
4.1 Data-data Umum Jembatan Beton Prategang-I Bentang 21,95 Meter
Gambar 4.1 Spesifikasi jembatan beton prategang-I bentang 21,95 m
a. Spesifikasi umum
Tebal lantai jembatan ts = 0,23 m
Jarak antar girder prategang dalam S1 = 2,5 m
Jarak antar girder prategang tepi S2 = 2,325 m
Lebar trotoar S3 = 1,155 m
Lebar jalur lalu lintas B1 = 23,559 m
Tebal sandaran B2 = 0,45 m
Lebar total jembatan B = 24,459 m
b. Beton
Mutu beton saat servis f’c = 42 MPa
Mutu beton saat stressing (80%) f’c = 33,6 MPa
Modulus Elastisitas (4700√f’c) Ec = 30459,48 MPa
c. Penulangan
Diameter > 13 mm = U-39
Diameter < 13 mm = U-24
Selimut beton badan = 25 mm
Selimut beton atas/bawah = 40 mm
d. Penulangan Prestress
∅ PC Strand (ASTM A-416) = 12,7 mm
UTS = 1860 MPa
e. Pelat Lantai dan Diafragma
Mutu beton saat servis f’c = 28 MPa
Tebal = 230 mm
Alcadeck 890
Diafragma cor setempat
4.1.1 Geometri Jembatan
Pada penelitian ini, jembatan yang digunakan memiliki 10 gelagar jembatan dengan dua jalur, enam lajur, dan dua arah. Akan tetapi pada pengujian beban di lapangan yang digunakan adalah dua jalur pada masing-masing arah yang berbeda.
Terdapat nilai kemiringan (skew) pada jembatan akibat adanya perbedaan sumbu utama struktur bawah jembatan yang tidak tegak lurus dengan sumbu arah memanjang pada struktur atas jembatan karena kondisi geometri jalan di lapangan yang tidak memungkinkan untuk dibangunnya suatu struktur bawah yang tegak lurus
dengan struktur atas pada jembatan . Sehingga posisi pilar jembatan akibat kondisi jalan mengakibatkan terjadinya kemiringan (skew) pada geometri struktur atas jembatan, dimana nilai kemiringan yang dihasilkan sebesar 20°.
Gambar 4.2 Posisi Lajur beban (Sumber : PT. Struktur Pintar Indonesia)
4.1.2 Pemeriksaan Nilai Momen Inersia Penampang
Gambar 4.3 Tampak samping profil I-girder
Terdapat tiga tipe penampang gelagar yang dimodelkan pada jembatan beton prategang-I dilapangan,dimana terdapat peralihan bentuk geometri dari penampang potongan A ke potongan B. Untuk detail ukuran penampang girder, akan dijelaskan sebagai berikut :
a. Penampang 1
Gambar 4.4 Penampang 1 (Potongan A) Tabel 4.1 Perhitungan momen inersia penampang 1
NO DIMENSI Luas Tampang A (mm2) Jarak thd alas y (mm) Statis Momen A*y (mm3) Titik Berat y' (mm) Momen Inersia Iy (mm4) Lebar b (mm) Tinggi h (mm) 1 600 1400 840000 700 588000000 701.18 1.37E+11 2 100 130 13000 1265 16445000 4.15E+09 3 100 130 13000 1265 16445000 4.15E+09 4 50 250 12500 125 1562500 4.21E+09 5 50 250 12500 125 1562500 4.21E+09 6 100 40 2000 1156.67 2313333.33 4.15E+08 7 100 40 2000 1156.67 2313333.33 4.15E+08 8 50 50 1250 266.67 333333.33 2.36E+08 9 50 50 1250 266.67 333333.33 2.36E+08 TOTAL 1.5524E+11
b. Penampang 2
Gambar 4.5 Penampang 2 (Potongan B) Tabel 4.2 Perhitungan momen inersia penampang 2
NO DIMENSI Luas Tampang A (mm) Jarak thd alas y (mm) Statis Momen A*y (mm) Titik Berat y' (mm) Momen Inersia Iy (mm) Lebar b (mm) Tinggi h (mm) 1 600 70 42000 1365 57330000 689,45 1,92E+10 2 800 130 104000 1265 131560000 3,46E+10 3 200 950 190000 790 150100000 1,62E+10 4 700 250 175000 125 21875000 5,67E+10 5 300 120 18000 1070 19260000 2,62E+09 6 300 120 18000 1070 19260000 2,62E+09 7 250 250 31250 333,33 10416666,7 4,07E+09 8 250 250 31250 333,33 10416666,7 4,07E+09 TOTAL 1,4005E+11
c. Penampang 3
Gambar 4.6 Penampang 3 (Potongan C) Tabel 4.3 Perhitungan momen inersia penampang 3
NO DIMENSI Luas Tampang A (mm2) Jarak thd alas y (mm) Statis Momen A*y (mm3) Titik Berat y' (mm) Momen Inersia Iy (mm4) Lebar b (mm) Tinggi h (mm) 1 600 700 420000 350 147000000 363.52 1.72E+10 2 100 130 13000 565 7345000 5.46E+08 3 100 130 13000 565 7345000 5.46E+08 4 100 40 2000 473.33 946666.67 2.43E+07 5 100 40 2000 473.33 946666.67 2.43E+07 TOTAL 1.8367E+10 4.2 Aksi pembebanan
Beban yang diberikan saat pelaksanaan konstruksi selesai baik pada saat beton girder sudah mengalami gaya prategang adalah beban hidup berjalan. Pembebanan statik yang diaplikasikan dengan beban hidup berjalan yang digunakan dalam penelitian ini adalah beban truk dengan dua as roda yang berjalan di sepanjang bentang gelagar sebesar 270 kN. Beban truk telah disesuaikan dengan standar pembebanan menurut RSNI T-02-2005, dimana beban maksimal yang diijinkan adalah 500 kN dan ditempatkan minimal pada satu lajur rencana setiap arah. Distribusi pembebanan truk akan dijelaskan pada gambar berikut.
Gambar 4.7 Beban truk 4.2.1 Tributary Area
Daerah pembebanan pada jembatan ini dibagi menjadi dua daerah bagian yang menerima beban terpusat dari roda truk.
Daerah yang diarsir warna merah merupakan besarnya luas daerah pembebanan dengan panjang sesuai dengan bentang jembatan dan lebar yang mempunyai nilai sama dengan jarak antar girder.
4.2.2 Penempatan Beban Truk
Beban truk ditempatkan di empat titik lokasi arah lateral (sumbu Y) pada jembatan yang telah disesuaikan dengan keadaan di lapangan, antara lain :
a. Y1 = 3.5 m (sisi kiri as roda) b. Y2 = 8 m (sisi kiri as roda) c. Y3 = 15.55 m (sisi kanan as roda) d. Y4 = 20.2 m (sisi kanan as roda)
Gambar 4.9 Posisi beban Y1
Gambar 4.11 Posisi beban Y3
Gambar 4.12 Posisi beban Y4
Sedangkan untuk penempatan beban truk arah memanjang (sumbu X) yang akan dianalisa dalam penelitian ini sebanyak 10 titik pembebanan dimana beban terpusat dari as roda depan sebagai titik awal acuan, yang akan dijelaskan pada tabel berikut.
Tabel 4.4 Posisi beban arah sumbu X
Posisi Beban Jarak As Depan dari Titik [0,0] (m) Beban As Depan (kN) Beban AS Belakang (kN) X1 1,0975 70 0 X2 5,3675 70 200 X3 5,4875 70 200 X4 9,7575 70 200 X5 10,975 70 200 X6 15,245 70 200 X7 16,4625 70 200 X8 20,7325 70 200 X9 20,8525 70 200 X10 25,1225 0 200
4.3 Perhitungan Lendutan dan Putaran Sudut Secara Manual
Dalam melakukan analisa perbandingan diperlukan analisa perhitungan secara manual untuk lebih meningkatkan keakuratan hasil perhitungan dengan menggunakan program. Analisa perhitungan lendutan dan putaran sudut menggunakan dua metode bertahap dimana saat beban terpusat mewakili beban as roda bagian depan dan pada saat beban terpusat mewakili beban as roda bagian belakang truk. Untuk perhitungan manual, kondisi penampang girder yang digunakan adalah penampang girder yang bersifat komposit dengan plat lantai jembatan.
Berikut salah satu contoh perhitungan saat variasi posisi beban truk berada di tengah bentang dengan titik acuan awal beban roda berada di tengah bentang :
L
A C B
35 kN
Gambar 4.13 Posisi beban terpusat di tengah bentang
Diketahui : P = 35 kN L = 21950 mm E = 30459,48 Mpa I = 3,302× 1011 mm4
44 a. Lendutan
mm
b. Putaran sudut
rad
Untuk contoh posisi beban as roda belakang pada jarak tertentu (4,27 m dari tengah bentang), adalah sebagai berikut :
a b
L
A C B
100 kN
Gambar 4.14 Posisi beban berada pada jarak tertentu
Diketahui : P = 100 kN L = 21150 mm a = 6305 mm b = 14845 mm E = 30459,48 Mpa I = 3,3 × 1011 mm4
a. Lendutan (a < b)
b. Putaran sudut
rad
Dari dua tahap perhitungan yang telah dilakukan, maka kedua hasil tersebut dijumlahkan sehingga mendapatkan nilai total lendutan dan putaran sudut akibat dua beban terpusat yang berbeda.
b. Putaran sudut
rad
Tabel 4.5 Perhitungan lendutan dan putaran sudut secara manual JARAK AS DEPAN DARI TITIK [0,0] (m) LENDUTAN (mm) PUTARAN SUDUT (rad) PUTARAN SUDUT (deg) 1,098 -0,068 4,65E-05 2,66E-03 5,368 -0,641 1,29E-04 7,38E-03 5,488 -0,684 1,37E-04 7,87E-03 9,758 -1,978 3,38E-04 1,94E-02 10,975 -2,231 3,61E-04 2,07E-02 15,245 -2,501 3,75E-04 2,15E-02 16,463 -2,379 3,23E-04 1,85E-02 20,733 -1,385 1,78E-04 1,02E-02 20,853 -1,347 1,73E-04 9,92E-03 25,123 -0,194 2,44E-05 1,40E-03
Perbandingan analisa perhitungan manual dengan analisa program terhadap hasil sensor pengujian dilapangan hanya bisa dilakukan pada girder yang memiliki sensor sesuai dengan pengujian di lapangan. Hal tersebut dikarenakan analisa hanya menggunakan perhitungan sederhana secara dua dimensi.
a. Analisa Lendutan
• Girder 4 (akibat beban Y2)
• Girder 5 (akibat beban Y2)
b. Analisa Lendutan
• Girder 4 (akibat beban Y2)
• Girder 7 (akibat beban Y3)
• Girder 9 (akibat beban Y4.)
4.4 Pengolahan Data Alat Sensor
Data yang dihasilkan oleh alat sensor di lapangan merupakan nilai lendutan dan putaran sudut hasil pembebanan statik berdasarkan fungsi waktu selama beban truk melewati jembatan tersebut. Pada penelitian ini akan mengolah data yang dihasilkan dari alat sensor menjadi nilai lendutan dan putaran sudut akibat pembebanan truk di sepuluh titik pada bentang jembatan yang sudah ditentukan.
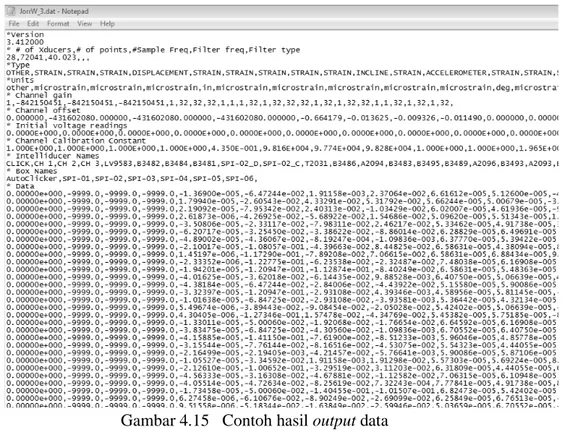
Untuk setiap variasi pembebanan dengan 4 kali siklus pembebanan (Y1,Y 2,Y 3,Y 4), data yang terukur pada LVDT dan Tiltmeter disimpan dalam satu judul file notepad. Contoh notepad data yang tersimpan sebagai berikut:
Gambar 4.15 Contoh hasil output data
4.4.1 Interpretasi Data
Alat sensor pada lapangan mempunyai nilai frekuensi 40 Hz, yang berarti setiap 1 detik menghasilkan 40 siklus data yang berbeda. Oleh karena itu, dari 40 siklus data akan dilakukan pengambilan sampel yang mempunyai nilai maksimum, sehingga didapatkan nilai data di setiap detik. Dari hasil tersebut maka diperoleh waktu yang dibutuhkan oleh truk untuk melewati jembatan. Tahapan selanjutnya adalah menghitung jarak yang ditempuh truk dalam waktu satu detik, dan langkah terakhir adalah menyesuaikan jarak yang dibutuhkan truk untuk melewati titik pembebanan yang telah ditentukan dengan hasil pembagian segmen jarak terhadap waktu, contoh sebagai berikut :
• Data file notepad = 1478 data 1478 data = 36 detik
• Nilai t = 36 detik, maka :
Tabel dan grafik hasil pengolahan nilai lendutan dan putaran sudut/rotasi terhadap waktu dilampirkan pada halaman lampiran.
4.4.2 Hasil pengolahan data
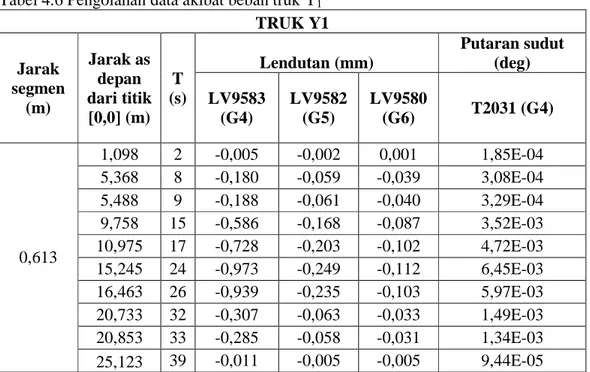
Hasil data perhitungan waktu kemudian disesuaikan dengan sampel data maksimum per detik yang sudah diolah sebelumnya. Dari pengolahan data yang telah dilakukan, maka akan didapatkan nilai lendutan pada LVDT yang terletak di tengah bentang dan tiltmeter yang terletak di tumpuan pada jarak 50 cm akibat pembebanan statik di 10 titik pada jembatan.
Tabel 4.6 Pengolahan data akibat beban truk Y1 TRUK Y1 Jarak segmen (m) Jarak as depan dari titik [0,0] (m) T (s) Lendutan (mm) Putaran sudut (deg) LV9583 (G4) LV9582 (G5) LV9580 (G6) T2031 (G4) 0,613 1,098 2 -0,005 -0,002 0,001 1,85E-04 5,368 8 -0,180 -0,059 -0,039 3,08E-04 5,488 9 -0,188 -0,061 -0,040 3,29E-04 9,758 15 -0,586 -0,168 -0,087 3,52E-03 10,975 17 -0,728 -0,203 -0,102 4,72E-03 15,245 24 -0,973 -0,249 -0,112 6,45E-03 16,463 26 -0,939 -0,235 -0,103 5,97E-03 20,733 32 -0,307 -0,063 -0,033 1,49E-03 20,853 33 -0,285 -0,058 -0,031 1,34E-03 25,123 39 -0,011 -0,005 -0,005 9,44E-05
Tabel 4.7 Pengolahan data akibat beban truk Y2 TRUK Y2 Jarak segmen (m) Jarak as depan dari titik [0,0] (m) T (s) Lendutan (mm) Putaran sudut (deg) LV9583 (G4) LV9582 (G5) LV9580 (G6) T2031 (G4) 0,698 1,098 2 -0,002 -0,002 0,000 5,46E-03 5,368 8 -0,104 -0,081 -0,053 5,69E-03 5,488 9 -0,111 -0,087 -0,056 5,96E-03 9,758 14 -0,759 -0,536 -0,330 1,18E-02 10,975 16 -0,999 -0,690 -0,418 1,44E-02 15,245 21 -1,449 -0,914 -0,538 1,61E-02 16,463 23 -1,359 -0,858 -0,504 1,44E-02 20,733 29 -0,411 -0,262 -0,159 7,53E-03 20,853 29 -0,382 -0,241 -0,147 7,37E-03 25,123 35 -0,019 -0,005 -0,012 5,34E-03
Tabel 4.8 Pengolahan data akibat beban truk Y3 TRUK Y3 Jarak segmen (m) Jarak as depan dari titik [0,0] (m) T (s)
Lendutan (mm) Putaran sudut (deg) LV9583 (G4) LV9582 (G5) LV9580 (G6) T2034 (G7) T2033 (G9) 0,761 1,098 1 -0,005 -0,007 -0,007 2,93E-05 3,13E-04 5,368 6 -0,076 -0,164 -0,181 9,48E-04 9,93E-05 5,488 7 -0,081 -0,173 -0,191 1,05E-03 1,38E-05 9,758 12 -0,344 -0,943 -1,027 7,46E-03 1,12E-03 10,975 13 -0,431 -1,209 -1,265 8,78E-03 2,11E-03 15,245 18 -0,503 -1,482 -1,499 9,72E-03 2,15E-03 16,463 20 -0,459 -1,299 -1,285 7,55E-03 1,99E-03 20,733 25 -0,076 -0,160 -0,146 8,33E-04 1,11E-04 20,853 25 -0,067 -0,138 -0,127 2,02E-04 5,17E-04 25,123 31 -0,013 -0,013 -0,022 2,33E-04 1,42E-04
Tabel 4.9 Pengolahan data akibat beban truk Y4 TRUK Y4 Jarak segmen (m) Jarak as depan dari titik [0,0] (m) T (s)
Lendutan (mm) Putaran sudut (deg) LV9583 (G4) LV9582 (G5) LV9580 (G6) T2034 (G7) T2033 (G9) 0,718 1,098 1 0,000 -0,002 -0,003 2,27E-04 5,29E-04 5,368 6 -0,019 -0,060 -0,098 3,41E-04 4,21E-04 5,488 7 -0,022 -0,065 -0,108 1,49E-04 5,91E-04 9,758 12 -0,090 -0,363 -0,638 5,01E-03 6,00E-03 10,975 13 -0,103 -0,452 -0,797 6,08E-03 7,27E-03 15,245 18 -0,121 -0,571 -1,018 7,79E-03 8,24E-03 16,463 20 -0,119 -0,551 -0,975 7,25E-03 7,36E-03 20,733 25 -0,058 -0,234 -0,400 2,79E-03 2,22E-03 20,853 25 -0,056 -0,226 -0,385 2,75E-03 2,16E-03 25,123 30 -0,006 -0,009 -0,026 7,52E-04 1,77E-05
Terdapat perbedaan antara hasil interpretasi data lendutan dengan putaran sudut terhadap waktu dimana hasil grafik pada sensor LVDT menghasilkan garis yang lurus sedangkan hasil grafik sensor tiltmeter menghasilkan garis yang naik turun. Hal tersebut disebabkan karena pengaruh kerja alat pada tiltmeter yang sangat sensitif terhadap getaran dalam pengukuran serta data nilai yang didapatkan sangat kecil, sehingga terlihat jelas perubahan nilai data pada tiltmeter.
4.5 Pemodelan Struktur Jembatan Dengan Midas-Civil
Ada sejumlah tahapan dalam pemodelan jembatan beton prategang-I dalam program Midas-Civil yang akan dijelaskan pada sub bab selanjutnya.
4.5.1 Pemodelan Geometri
Pemodelan girder jembatan pada program Midas-Civil didefiniskan sabagai elemen. Geometri elemen disesuaikan dengan geometri jembatan pada gambar rencana. Pada pembuatan elemen jembatan perlu diperhatikan jenis penampang gelagar jembatan yang dipilih. Penempatan penampang gelagar jembatan yang tepat mengikuti gambar 4.2 tentang penempatan lokasi penampang gelagar jembatan.
Gambar 4.16 Elemen Geometri Jembatan
(Sumber : Data Proyek Jembatan Kebon Jeruk STA. 8+462.038 Jorr W2 Utara)
4.5.2 Assign Material
Terdapat dua jenis material yang digunakan sesuai dengan data jembatan yang ada, antara lain untuk beton girder dan beton diafragma jembatan.
Gambar 4.17 Material Data Beton Girder dan Beton Diafragma
4.5.3 Assign Section Properties
Penampang yang digunakan dalam program disesuaikan dengan penampang girder yang ada. Dan pada program pemodelan penampang yang digunakan adalah penampang komposit, dimana penampang girder dengan pelat pada jembatan merupakan satu kesatuan struktur.
Gambar 4.19 Section 3 4.5.4 Assign Truck Load
Pemodelan beban truk yang diterapkan pada program Midas-Civil yaitu dengan memasukkan nilai beban roda yang diaplikasikan menjadi beban terpusat pada girder tertentu sesuai dengan daerah pembebanan jembatan yang telah ditentukan.
Gambar 4.21 Assign Static Point Load 4.5.5 Hasil Analisa Program
Setelah semua tahapan pemodelan telah dilakukan, dilanjutkan dengan menjalankan analisa program dari pemodelan. Hasil yang ditampilkan dalam pemodelan ini adalah hasil analisa lendutan (DX,DY,DZ) dan putaran sudut (RX,RY,RZ) akibat beban-beban yang bekerja pada jembatan.
Gambar 4.22 Hasil Lendutan pada Pemodelan
Nilai hasil lendutan dan putaran sudut akibat setiap variasi pembebanan yang diambil pada node dari pemodelan jembatan yang telah dilakukan disesuaikan dengan letak sensor yang ada pada kondisi di lapangan saat pengujian.
4.6 Perbandingan Perhitungan Manual dan Midas-Civil Terhadap Pengukuran di Lapangan
Dari hasil data yang telah diolah, maka dilakukan perbandingan antara data hasil lendutan dan putaran sudut pada program Midas-Civil, data hasil pengujian di lapangan, beserta hasil perhitungan manual.
4.6.1 Lendutan
Nilai lendutan yang diambil dari hasil analisa program Midas-Civil adalah nilai lendutan arah sumbu z (DZ) pada tengah bentang yang telah disesuaikan dengan alat sensor pengujian di lapangan.
Tabel 4.10 Perbandingan nilai lendutan akibat beban truk Y1
TRUK Y1 Beban Posisi As Depan Dari Titik [0,0] (m) Lendutan (mm)
Girder 4 Girder 5 Girder 6
Midas (DZ) Sensor LVDT %* Midas (DZ) Sensor LVDT %* Midas (DZ) Sensor LVDT %* Y1-1 1,0975 -0,013 -0,005 59 -0,008 -0,002 72 -0,004 -0,001 82 Y1-7 5,3675 -0,179 -0,180 0 -0,107 -0,059 45 -0,052 -0,039 25 Y1-2 5,4875 -0,191 -0,188 2 -0,115 -0,061 47 -0,055 -0,040 28 Y1-8 9,7575 -0,667 -0,586 12 -0,384 -0,168 56 -0,179 -0,087 52 Y1-3 10,975 -0,784 -0,728 7 -0,446 -0,203 55 -0,205 -0,102 50 Y1-6 15,245 -0,914 -0,973 6 -0,505 -0,249 51 -0,227 -0,112 51 Y1-4 16,4625 -0,860 -0,939 8 -0,478 -0,235 51 -0,216 -0,103 52 Y1-9 20,7325 -0,433 -0,307 29 -0,257 -0,063 75 -0,123 -0,033 73 Y1-5 20,8525 -0,419 -0,285 32 -0,249 -0,058 77 -0,119 -0,031 74 Y1-10 25,1225 -0,037 -0,011 69 -0,023 -0,005 77 -0,012 -0,005 61 *) Perbedaan terhadap hasil pengukuran sensor
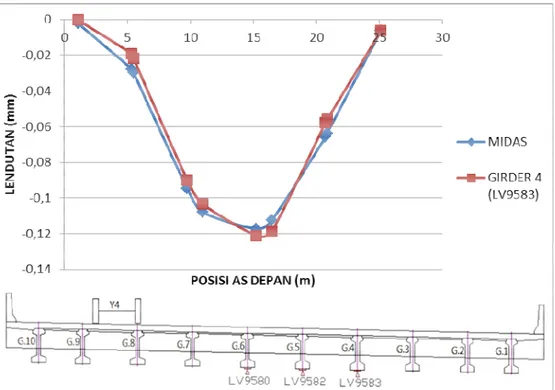
Gambar 4.23 Perbandingan nilai lendutan pada girder 4 akibat beban Y1
Gambar 4.25 Perbandingan nilai lendutan pada girder 6 akibat beban Y1
Tabel 4.11 Perbandingan nilai lendutan akibat beban truk Y2
TRUK Y2 Beban Posisi As Depan Dari Titik [0,0] (m) Lendutan (mm)
Girder 4 Girder 5 Girder 6
Midas (DZ) Sensor LVDT %* Midas (DZ) Sensor LVDT %* Midas (DZ) Sensor LVDT %* Y2-1 1,0975 -0,016 -0,002 88 -0,015 -0,002 87 -0,011 0,000 98 Y2-7 5,3675 -0,230 -0,104 55 -0,214 -0,081 62 -0,163 -0,053 68 Y2-2 5,4875 -0,246 -0,111 55 -0,229 -0,087 62 -0,175 -0,056 68 Y2-8 9,7575 -0,920 -0,759 17 -0,841 -0,536 36 -0,611 -0,330 46 Y2-3 10,975 -1,106 -0,999 10 -1,004 -0,690 31 -0,718 -0,418 42 Y2-6 15,245 -1,379 -1,449 5 -1,223 -0,914 25 -0,836 -0,538 36 Y2-4 16,4625 -1,258 -1,359 7 -1,131 -0,858 24 -0,787 -0,504 36 Y2-9 20,7325 -0,566 -0,411 27 -0,526 -0,262 50 -0,397 -0,159 60 Y2-5 20,8525 -0,546 -0,382 30 -0,507 -0,241 52 -0,384 -0,147 62 Y2-10 25,1225 -0,045 -0,019 58 -0,042 -0,005 88 -0,033 -0,012 63 *) Perbedaan terhadap hasil pengukuran sensor
Gambar 4.26 Perbandingan nilai lendutan pada girder 4 akibat beban Y2
Gambar 4.28 Perbandingan nilai lendutan pada girder 6 akibat beban Y2
Tabel 4.12 Perbandingan nilai lendutan akibat beban truk Y3
TRUK Y3 Beban Posisi As Depan Dari Titik [0,0] (m) Lendutan (mm)
Girder 4 Girder 5 Girder 6
Midas (DZ) Sensor LVDT %* Midas (DZ) Sensor LVDT %* Midas (DZ) Sensor LVDT %* Y3-1 1,0975 -0,009 -0,005 43 -0,013 -0,007 49 -0,015 -0,007 54 Y3-7 5,3675 -0,124 -0,076 38 -0,186 -0,164 12 -0,227 -0,181 21 Y3-2 5,4875 -0,132 -0,081 39 -0,199 -0,173 13 -0,243 -0,191 21 Y3-8 9,7575 -0,451 -0,344 24 -0,707 -0,943 33 -0,906 -1,027 13 Y3-3 10,975 -0,525 -0,431 18 -0,834 -1,209 45 -1,088 -1,265 16 Y3-6 15,245 -0,596 -0,503 16 -0,983 -1,482 51 -1,353 -1,499 11 Y3-4 16,4625 -0,564 -0,459 19 -0,923 -1,299 41 -1,237 -1,285 4 Y3-9 20,7325 -0,300 -0,076 75 -0,454 -0,160 65 -0,558 -0,146 74 Y3-5 20,8525 -0,290 -0,067 77 -0,438 -0,138 69 -0,539 -0,127 76 Y3-10 25,1225 -0,025 -0,013 48 -0,037 -0,013 64 -0,044 -0,022 50 *) Perbedaan terhadap hasil pengukuran sensor
Gambar 4.29 Perbandingan nilai lendutan pada girder 4 akibat beban Y3
Gambar 4.31 Perbandingan nilai lendutan pada girder 6 akibat beban Y3
Tabel 4.13 Perbandingan nilai lendutan akibat beban truk Y4
TRUK Y4 Beban Posisi As Depan Dari Titik [0,0] (m) Lendutan (mm)
Girder 4 Girder 5 Girder 6
Midas (DZ) Sensor LVDT %* Midas (DZ) Sensor LVDT %* Midas (DZ) Sensor LVDT %* Y4-1 1,0975 -0,002 0,000 88 -0,005 -0,002 66 -0,009 -0,003 64 Y4-7 5,3675 -0,028 -0,019 31 -0,069 -0,060 14 -0,129 -0,098 24 Y4-2 5,4875 -0,030 -0,022 27 -0,074 -0,065 12 -0,138 -0,108 22 Y4-8 9,7575 -0,095 -0,090 5 -0,244 -0,363 49 -0,468 -0,638 36 Y4-3 10,975 -0,108 -0,103 4 -0,281 -0,452 61 -0,546 -0,797 46 Y4-6 15,245 -0,117 -0,121 3 -0,313 -0,571 83 -0,624 -1,018 63 Y4-4 16,4625 -0,112 -0,119 5 -0,298 -0,551 85 -0,589 -0,975 65 Y4-9 20,7325 -0,066 -0,058 12 -0,165 -0,234 42 -0,310 -0,400 29 Y4-5 20,8525 -0,064 -0,056 12 -0,160 -0,226 41 -0,300 -0,385 28 Y4-10 25,1225 -0,006 -0,006 1 -0,015 -0,009 39 -0,027 -0,026 4 *) Perbedaan terhadap hasil pengukuran sensor
Gambar 4.32 Perbandingan nilai lendutan pada girder 4 akibat beban Y4
Gambar 4.34 Perbandingan nilai lendutan pada girder 6 akibat beban Y4
Berdasarkan hasil perbandingan nilai lendutan dengan pemodelan Midas-Civil dan perhitungan manual terhadap hasil pengukuran di lapangan, dapat diketahui bahwa :
a. Pada Gambar 4.23, Gambar 4.26 , Gambar 4.27, Gambar 4.29, Gambar 4.31, Gambar 4.32, perhitungan dengan program Midas Civil rata-rata menghasilkan nilai yang mendekati hasil pengukuran sensor di lapangan. Sedangkan pada Gambar 4.24, Gambar 4.25, Gambar 4.28, Gambar 4.30, Gambar 4.33, Gambar 4.42, terdapat selisih nilai yang cukup signifikan antara perhitungan dengan program terhadap hasil sensor di lapangan. Hal ini menunjukan adanya perbedaan analisa pemodelan jembatan dengan kondisi jembatan sebenarnya di lapangan, dikarenakan adanya perbedaan nilai modulus elastisitas beton pada pemodelan dengan kondisi di lapangan. Perbedaan tersebut dikarenakan waktu proses pengecoran beton yang berbeda pada setiap girder di lapangan, sehingga kuat tekan beton girder di lapangan menjadi berbeda dengan kondisi pemodelan
dengan Midas Civil yang menganggap nilai kuat tekan pada setiap girder adalah sama dengan nilai kuat tekan rencana.
b. Terdapat perbedaan selisih nilai lendutan pada setiap kondisi beban yang berbeda. Dari hasil pada Gambar 4.26, Gambar 4.27, Gambar 4.29, dapat dilihat bahwa perbandingan hasil pemodelan saat posisi beban mendekati girder yang terdapat sensor,mempunyai selisih nilai yang kecil dan mendekati dibandingkan saat posisi beban menjauhi girder yang terdapat sensor (Gambar 4.24, Gambar 4.25, Gambar 4.30, Gambar 4.33, Gambar 4.34). Hal tersebut dikarenakan akibat pemodelan diafragma yang berbeda dengan kondisi lapangan, dimana kemungkinan adanya geometri diafragma yang tidak presisi dengan kondisi geometri rencana, sehingga distribusi beban pada girder yang terdapat sensor tidak mewakili pada girder lainnya yang tidak terdapat sensor.
c. Pada Gambar 4.26, Gambar 4.27, Gambar 4.31, menunjukan analisa perhitungan nilai lendutan secara manual mempunyai perbedaan nilai yang cukup signifikan dibandingkan dengan hasil program dan sensor di lapangan. Hal tersebut dikarenakan konsep perhitungan manual dilakukan secara 2D, dimana hanya diterapkan pada girder terdapat sensor yang menerima beban secara langsung, sedangkan pada kondisi sebenarnya beban terdistribusi secara merata ke seluruh girder akibat adanya pengaruh diafragma pada jembatan yang menyebabkan nilai lendutan yang dihasilkan lebih kecil.
4.6.2 Putaran Sudut
Untuk nilai putaran sudut/rotasi yang diambil dari hasil analisa program Midas-Civil adalah nilai putaran sudut terhadap arah sumbu y (RY) pada tumpuan yang telah disesuaikan dengan alat sensor pengujian di lapangan.
Tabel 4.14 Perbandingan nilai putaran sudut akibat beban truk Y1 TRUK Y1 BEBAN JARAK AS DEPAN DARI TITIK [0,0] (m)
PUTARAN SUDUT (deg) GIRDER 4 Midas
(RY)
Sensor
TILT %*
Y1-1 1,098 1,15,E-04 1,85,E-04 62 Y1-7 5,368 1,43,E-03 3,08,E-04 79 Y1-2 5,488 1,55,E-03 3,29,E-04 79 Y1-8 9,758 4,58,E-03 3,52,E-03 23 Y1-3 10,975 5,21,E-03 4,72,E-03 10 Y1-6 15,245 5,56,E-03 6,45,E-03 16 Y1-4 16,463 5,10,E-03 5,97,E-03 17 Y1-9 20,733 2,41,E-03 1,49,E-03 38 Y1-5 20,853 2,29,E-03 1,34,E-03 42 Y1-10 25,123 1,72,E-04 9,44,E-05 45 *)Perbedaan terhadap hasil pengukuran sensor
Gambar 4.35 Perbandingan nilai rotasi pada girder 4 akibat beban Y1
Tabel 4.15 Perbandingan nilai putaran sudut akibat beban truk Y2
TRUK Y2
DEPAN DARI TITIK [0,0] (m) GIRDER 4 Midas (RY) Sensor TILT %*
Y2-1 1,098 3,44,E-04 5,46,E-03 94 Y2-7 5,368 3,44,E-03 5,69,E-03 40 Y2-2 5,488 3,67,E-03 5,96,E-03 38 Y2-8 9,758 1,20,E-02 1,18,E-02 2 Y2-3 10,975 1,38,E-02 1,44,E-02 5 Y2-6 15,245 1,54,E-02 1,61,E-02 5 Y2-4 16,463 1,38,E-02 1,44,E-02 5 Y2-9 20,733 6,07,E-03 7,53,E-03 19 Y2-5 20,853 5,84,E-03 7,37,E-03 21 Y2-10 25,123 4,58,E-04 5,34,E-03 91 *) Perbedaan terhadap hasil pengukuran sensor
Gambar 4.36 Perbandingan nilai rotasi pada girder 4 akibat beban Y2
Tabel 4.16 Perbandingan nilai putaran sudut akibat beban truk Y3
TRUK Y3 BEBAN JARAK AS DEPAN DARI TITIK [0,0] (m)
PUTARAN SUDUT (deg)
GIRDER 7 GIRDER 9 Midas (RY) Sensor TILT %* Midas (RY) Sensor TILT %*
Y3-7 5,368 1,72,E-03 9,48,E-04 45 1,72,E-03 9,93,E-05 94 Y3-2 5,488 1,83,E-03 1,05,E-03 43 1,83,E-03 1,38,E-05 99 Y3-8 9,758 5,84,E-03 7,46,E-03 28 5,84,E-03 1,12,E-03 81 Y3-3 10,975 6,70,E-03 8,78,E-03 31 6,70,E-03 2,11,E-03 69 Y3-6 15,245 7,45,E-03 9,72,E-03 30 7,45,E-03 2,15,E-03 71 Y3-4 16,463 6,70,E-03 7,55,E-03 13 6,70,E-03 1,99,E-03 70 Y3-9 20,733 2,98,E-03 8,33,E-04 72 2,98,E-03 1,11,E-04 96 Y3-5 20,853 2,87,E-03 2,02,E-04 93 2,87,E-03 5,17,E-04 82 Y3-10 25,123 2,29,E-04 2,33,E-04 0 2,29,E-04 1,42,E-04 0 *) Perbedaan terhadap hasil pengukuran sensor
Gambar 4.38 Perbandingan nilai rotasi pada girder 9 akibat beban Y3
Tabel 4.17 Perbandingan nilai putaran sudut akibat beban truk Y4
TRUK Y4 BEBAN JARAK AS DEPAN DARI TITIK [0,0] (m)
PUTARAN SUDUT (deg)
GIRDER 7 GIRDER 9 Midas (RY) Sensor TILT %* Midas (RY) Sensor TILT %*
Y4-1 1,098 1,72,E-04 2,27,E-04 0 1,72,E-04 5,29,E-04 0 Y4-7 5,368 1,55,E-03 3,41,E-04 78 1,55,E-03 4,21,E-04 73 Y4-2 5,488 1,66,E-03 1,49,E-04 91 1,66,E-03 5,91,E-04 64 Y4-8 9,758 5,04,E-03 5,01,E-03 1 5,04,E-03 6,00,E-03 19 Y4-3 10,975 5,73,E-03 6,08,E-03 6 5,73,E-03 7,27,E-03 27 Y4-6 15,245 6,25,E-03 7,79,E-03 20 6,25,E-03 8,24,E-03 32 Y4-4 16,463 5,67,E-03 7,25,E-03 22 5,67,E-03 7,36,E-03 30 Y4-9 20,733 2,58,E-03 2,79,E-03 8 2,58,E-03 2,22,E-03 14 Y4-5 20,853 2,52,E-03 2,75,E-03 9 2,52,E-03 2,16,E-03 14 Y4-10 25,123 1,72,E-04 7,52,E-04 77 1,72,E-04 1,77,E-05 0 *)Perbedaan terhadap hasil pengukuran sensor
Gambar 4.39 Perbandingan nilai rotasi pada girder 7 akibat beban Y4
Gambar 4.40 Perbandingan nilai rotasi girder 9 akibat beban Y4
Berdasarkan hasil perbandingan nilai putaran sudut dengan pemodelan Midas-Civil dan perhitungan manual terhadap hasil pengukuran di lapangan, dapat diketahui bahwa :
a. Dari dua belas hasil analisa sensor pada putaran sudut, hanya terdapat enam analisa yang bisa dibandingkan dengan program Midas Civil dan perhitungan secara manual. Hal tersebut dikarenakan alat sensor untuk putaran sudut tidak bekerja dengan baik saat kondisi pembebanan menjauhi girder yang terdapat sensor, sehingga data yang dihasilkan tidak akurat.
b. Pada Gambar 4.35, Gambar 4.36 , Gambar 4.37, Gambar 4.39, Gambar 4.40, hasil analisa menunjukan bahwa nilai putaran sudut menggunakan program Midas-civil mendekati nilai hasil sensor pengujian dilapangan. Sedangkan pada Gambar 4.38, terdapat selisih nilai yang cukup signifikan antara perhitungan dengan program terhadap hasil sensor di lapangan. Hal ini menunjukan adanya perbedaan nilai modulus elastisitas beton, dimana nilai modulus elastisitas beton di lapangan lebih besar dari pemodelan. Perbedaan tersebut dikarenakan waktu proses pengecoran beton yang berbeda pada setiap girder di lapangan, sehingga kuat tekan beton girder di lapangan menjadi berbeda dengan kondisi pemodelan dengan Midas Civil yang menganggap nilai kuat tekan pada setiap girder adalah sama dengan nilai kuat tekan rencana.
c. Pada Gambar 4.36, Gambar 4.37, Gambar 4.40, menunjukan analisa perhitungan nilai putaran sudut secara manual mempunyai perbedaan nilai yang cukup signifikan dibandingkan dengan hasil program dan sensor di lapangan. Hal tersebut dikarenakan konsep perhitungan manual hanya diterapkan pada girder terdapat sensor yang menerima beban secara langsung, sedangkan pada kondisi sebenarnya beban terdistribusi secara merata ke seluruh girder akibat adanya pengaruh diafragma pada jembatan yang menyebabkan nilai putaran sudut yang dihasilkan lebih kecil.
4.7 Pengaruh Nilai Modulus Elastisitas Pada Pemodelan Jembatan
Nilai modulus elastisitas pada suatu material beton pada girder dapat mempengaruhi besarnya nilai lendutan dan putaran sudut. Pada sub bab ini akan dilakukan suatu studi pengaruh perubahan parameter pada program Midas-civil terhadap hasil lendutan dan putaran sudut dibandingkan dengan hasil sensor pengujian di lapangan. Hal tersebut dikarenakan nilai modulus elastisitas pada kondisi jembatan sebenarnya di lapangan yang berbeda dengan nilai modulus elastisitas rencana, sehingga dapat menghasilkan nilai lendutan putaran sudut yang berbeda. Analisa ini dilakukan hanya pada posisi beban berada diatas girder yang memiliki sensor dan posisi beban menjauhi girder yang memiliki sensor. Variasi peningkatan modulus elastisitas yang digunakan yaitu +5%, +10%, dan +15%.
4.7.1 Pengaruh Terhadap Lendutan
Tabel 4.18 Pengaruh nilai modulus elastisitas terhadap nilai lendutan pada girder 4 akibat beban Y2 TRUK Y2 (GIRDER 4) BEBAN JARAK AS DEPAN DARI TITIK [0,0] (m) LENDUTAN (mm) SENSOR LVDT MIDAS E (MPa) 42 MPa + 5% + 10% + 15% Y2-1 1,0975 -0,002 -0,016 -0,015 -0,015 -0,015 Y2-7 5,3675 -0,104 -0,230 -0,224 -0,218 -0,213 Y2-2 5,4875 -0,111 -0,246 -0,240 -0,234 -0,228 Y2-8 9,7575 -0,759 -0,920 -0,892 -0,866 -0,842 Y2-3 10,975 -0,999 -1,106 -1,072 -1,041 -1,012 Y2-6 15,245 -1,449 -1,379 -1,337 -1,298 -1,262 Y2-4 16,4625 -1,359 -1,258 -1,220 -1,184 -1,151 Y2-9 20,7325 -0,411 -0,566 -0,549 -0,533 -0,519 Y2-5 20,8525 -0,382 -0,546 -0,530 -0,515 -0,501 Y2-10 25,1225 -0,019 -0,045 -0,044 -0,043 -0,043
Gambar 4.41 Perbandingan nilai lendutan akibat pengaruh nilai E terhadap hasil sensor pada girder 4 akibat beban Y2
Tabel 4.19 Pengaruh nilai modulus elastisitas terhadap nilai lendutan pada girder 4 akibat beban Y4 TRUK Y4 (GIRDER 4) BEBAN JARAK AS DEPAN DARI TITIK [0,0] (m) LENDUTAN (mm) SENSOR LVDT MIDAS E (MPa) 42 MPa + 5% + 10% + 15% Y4-1 1,0975 0,000 -0,002 -0,002 -0,002 -0,002 Y4-7 5,3675 -0,019 -0,028 -0,026 -0,025 -0,024 Y4-2 5,4875 -0,022 -0,030 -0,028 -0,027 -0,026 Y4-8 9,7575 -0,090 -0,095 -0,089 -0,084 -0,080 Y4-3 10,975 -0,103 -0,108 -0,101 -0,095 -0,090 Y4-6 15,245 -0,121 -0,117 -0,110 -0,103 -0,096 Y4-4 16,4625 -0,119 -0,112 -0,105 -0,099 -0,093 Y4-9 20,7325 -0,058 -0,066 -0,062 -0,059 -0,056 Y4-5 20,8525 -0,056 -0,064 -0,060 -0,057 -0,054 Y4-10 25,1225 -0,006 -0,006 -0,006 -0,006 -0,006
Gambar 4.42 Perbandingan nilai lendutan akibat pengaruh nilai E terhadap hasil sensor pada girder 4 akibat beban Y4
4.7.2 Pengaruh Terhadap Putaran Sudut
Tabel 4.20 Pengaruh nilai modulus elastisitas terhadap nilai putaran sudut pada girder 7 akibat beban Y3
TRUK Y3 (GIRDER 7) BEBAN JARAK AS DEPAN DARI TITIK [0,0] (m) ROTASI (deg) SENSOR TILT-METER MIDAS E (MPa) 42 MPa + 5% + 10% + 15% Y3-1 1,098 0,0000 0,0002 0,0002 0,0002 0,0001 Y3-7 5,368 0,0009 0,0017 0,0016 0,0015 0,0014 Y3-2 5,488 0,0011 0,0018 0,0017 0,0016 0,0015 Y3-8 9,758 0,0075 0,0058 0,0055 0,0051 0,0047 Y3-3 10,975 0,0088 0,0067 0,0062 0,0058 0,0054 Y3-6 15,245 0,0097 0,0074 0,0069 0,0065 0,0060 Y3-4 16,463 0,0076 0,0067 0,0062 0,0058 0,0054 Y3-9 20,733 0,0008 0,0030 0,0027 0,0026 0,0024 Y3-5 20,853 0,0002 0,0029 0,0027 0,0025 0,0023 Y3-10 25,123 0,0002 0,0002 0,0002 0,0002 0,0002
Gambar 4.43 Perbandingan nilai putaran sudut akibat pengaruh nilai E terhadap hasil sensor pada girder 4 akibat beban Y2
Tabel 4.21 Pengaruh nilai modulus elastisitas terhadap nilai putaran sudut pada girder 7 akibat beban Y4
TRUK Y4 (GIRDER 7) BEBAN POSISI AS DEPAN DARI TITIK [0,0] (m) ROTASI (deg) SENSOR TILT-METER MIDAS E (MPa) 42 MPa + 5% + 10% + 15% Y4-1 1,098 0,0002 0,0002 0,0002 0,0001 0,0001 Y4-7 5,368 0,0003 0,0015 0,0014 0,0014 0,0012 Y4-2 5,488 0,0001 0,0017 0,0015 0,0014 0,0013 Y4-8 9,758 0,0050 0,0050 0,0047 0,0044 0,0039 Y4-3 10,975 0,0061 0,0057 0,0053 0,0049 0,0044 Y4-6 15,245 0,0078 0,0062 0,0058 0,0054 0,0048 Y4-4 16,463 0,0073 0,0057 0,0052 0,0049 0,0043 Y4-9 20,733 0,0028 0,0026 0,0024 0,0022 0,0020 Y4-5 20,853 0,0027 0,0025 0,0023 0,0022 0,0020 Y4-10 25,123 0,0008 0,0002 0,0002 0,0002 0,0001
Gambar 4.44 Perbandingan nilai putaran sudut akibat pengaruh nilai E terhadap hasil sensor pada girder 7 akibat beban Y4
Dari hasil studi parameter pengaruh nilai modulus elastisitas terhadap lendutan dan putaran sudut, dapat diketahui bahwa semakin besar nilai modulus elastisitas beton maka semakin kecil nilai lendutan dan putaran sudut yang dihasilkan. Hal tersebut menunjukan bahwa perbedaan nilai modulus elastisitas rencana pada pemodelan dengan kondisi sebenarnya di lapangan mempengaruhi nilai lendutan dan putaran sudut yang terjadi pada girder jembatan. Kondisi ini dapat dilihat dari konsep perhitungan nilai lendutan dan putaran sudut secara teoritis yang berbanding terbalik dengan nilai modulus elastisitas.
4.8 Pengaruh Pemodelan Dengan Diafragma dan Tanpa Diafragma
Diafragma yang berfungsi sebagai pengaku pada struktur jembatan dapat berpengaruh terhadap nilai lendutan dan putaran sudut pada masing-masing girder yang ada, di karenakan struktur diafragma lah yang membuat beban terdistribusi
secara merata ke seluruh girder pada jembatan. Pada penelitian ini, akan dijelaskan pengaruh pemodelan jembatan apabila menggunakan diafragma dan tanpa menggunakan difragma. Sama halnya dengan sub bab sebelumnya, analisa ini dilakukan hanya pada posisi beban berada diatas girder yang memiliki sensor dan posisi beban menjauhi girder yang memiliki sensor.
4.8.1 Pengaruh Terhadap Lendutan
Tabel 4.22 Perbandingan nilai lendutan akibat pengaruh pemodelan dengan dan tanpa diafragma pada girder 4 akibat beban Y2
TRUK Y2 (GIRDER 4) BEBAN JARAK AS DEPAN DARI TITIK [0,0] (m) LENDUTAN (mm) SENSOR LVDT MIDAS Dengan Diafragma Tanpa Diafragma Y2-1 1,098 -0,002 -0,016 -0,019 Y2-7 5,368 -0,104 -0,230 -0,287 Y2-2 5,488 -0,111 -0,246 -0,307 Y2-8 9,758 -0,759 -0,920 -1,202 Y2-3 10,975 -0,999 -1,106 -1,472 Y2-6 15,245 -1,449 -1,379 -1,932 Y2-4 16,463 -1,359 -1,258 -1,720 Y2-9 20,733 -0,411 -0,566 -0,707 Y2-5 20,853 -0,382 -0,546 -0,682 Y2-10 25,123 -0,019 -0,045 -0,055
Gambar 4.45 Perbandingan nilai lendutan akibat pengaruh pemodelan dengan dan tanpa diafragma pada girder 4 akibat beban Y2
Tabel 4.23 Perbandingan nilai lendutan akibat pengaruh pemodelan dengan dan tanpa diafragma pada girder 4 akibat beban Y3
TRUK Y3 (GIRDER 4) BEBAN JARAK AS DEPAN DARI TITIK [0,0] (m) LENDUTAN (mm) SENSOR LVDT MIDAS Dengan Diafragma Tanpa Diafragma Y3-1 1,098 -0,005 -0,009 -0,008 Y3-7 5,368 -0,076 -0,124 -0,104 Y3-2 5,488 -0,081 -0,132 -0,111 Y3-8 9,758 -0,344 -0,451 -0,334 Y3-3 10,975 -0,431 -0,525 -0,372 Y3-6 15,245 -0,503 -0,596 -0,361 Y3-4 16,463 -0,459 -0,564 -0,360 Y3-9 20,733 -0,076 -0,300 -0,247 Y3-5 20,853 -0,067 -0,290 -0,240 Y3-10 25,123 -0,013 -0,025 -0,023
Gambar 4.46 Perbandingan nilai lendutan akibat pengaruh pemodelan dengan dan tanpa diafragma pada girder 4 akibat beban Y3
4.8.2 Pengaruh Terhadap Putaran sudut
Tabel 4.24 Perbandingan nilai putaran sudut akibat pengaruh pemodelan dengan dan tanpa diafragma pada girder 7 akibat beban Y3
TRUK Y3 (GIRDER 7) BEBAN JARAK AS DEPAN DARI TITIK [0,0] (m)
PUTARAN SUDUT (deg) SENSOR TILT-METER MIDAS Dengan Diafragma Tanpa Diafragma Y3-1 1,098 0,0000 0,0002 0,0002 Y3-7 5,368 0,0009 0,0017 0,0021 Y3-2 5,488 0,0011 0,0018 0,0023 Y3-8 9,758 0,0075 0,0058 0,0079 Y3-3 10,975 0,0088 0,0067 0,0093 Y3-6 15,245 0,0097 0,0074 0,0109 Y3-4 16,463 0,0076 0,0067 0,0097 Y3-9 20,733 0,0008 0,0030 0,0040 Y3-5 20,853 0,0002 0,0029 0,0038 Y3-10 25,123 0,0002 0,0002 0,0003
Gambar 4.47 Perbandingan nilai putaran sudut akibat pengaruh pemodelan dengan dan tanpa diafragma pada girder 7 akibat beban Y3
Tabel 4.25 Perbandingan nilai putaran sudut akibat pengaruh pemodelan dengan dan tanpa diafragma pada girder 7 akibat beban Y4
TRUK Y4 (GIRDER 7) BEBAN POSISI AS DEPAN DARI TITIK [0,0] (m)
PUTARAN SUDUT (deg) SENSOR TILT-METER MIDAS Dengan Diafragma Tanpa Diafragma Y4-1 1,098 0,0002 0,0002 0,0001 Y4-7 5,368 0,0003 0,0015 0,0015 Y4-2 5,488 0,0001 0,0017 0,0016 Y4-8 9,758 0,0050 0,0050 0,0049 Y4-3 10,975 0,0061 0,0057 0,0055 Y4-6 15,245 0,0078 0,0062 0,0059 Y4-4 16,463 0,0073 0,0057 0,0055 Y4-9 20,733 0,0028 0,0026 0,0026 Y4-5 20,853 0,0027 0,0025 0,0025 Y4-10 25,123 0,0008 0,0002 0,0002
Gambar 4.48 Perbandingan nilai lendutan akibat pengaruh pemodelan dengan dan tanpa diafragma pada girder 4 akibat beban Y3
Dari hasil analisa pengaruh pemodelan dengan dan tanpa diafragma terhadap nilai lendutan dan putaran sudut, dapat diketahui bahwa :
a. Pada Gambar 4.45 dan Gambar 4.47, dimana saat posisi beban mendekati girder yang terdapat sensor, pemodelan tanpa menggunakan diafragma menghasilkan nilai lendutan dan putaran sudut yang lebih besar daripada pemodelan menggunakan diafragma. Kondisi tersebut terjadi dikarenakan beban terdistribusi paling besar hanya pada girder yang menerima beban secara langsung diatasnya.
b. Pada Gambar 4.46 dan Gambar 4.48, dimana saat posisi beban menjauhi girder yang terdapat sensor, pemodelan tanpa menggunakan diafragma menghasilkan nilai lendutan dan putaran sudut yang lebih kecil daripada pemodelan menggunakan diafragma. Kondisi tersebut terjadi dikarenakan kekakuan struktur jembatan yang berkurang akibat tidak
adanya diafragma, sehingga girder yang tidak menerima beban secara langsung diatasnya tidak mewakili distribusi beban yang terjadi.
![Tabel 4.5 Perhitungan lendutan dan putaran sudut secara manual JARAK AS DEPAN DARI TITIK [0,0] (m) LENDUTAN (mm) PUTARAN SUDUT (rad) PUTARAN SUDUT (deg) 1,098 -0,068 4,65E-05 2,66E-03 5,368 -0,641 1,29E-04 7,38E-03 5,488 -0,684 1,37E-04](https://thumb-ap.123doks.com/thumbv2/123dok/2517822.2226018/13.918.203.618.430.753/perhitungan-lendutan-putaran-titik-lendutan-putaran-sudut-putaran.webp)
![Tabel 4.7 Pengolahan data akibat beban truk Y2 TRUK Y2 Jarak segmen (m) Jarak as depan dari titik [0,0] (m) T (s) Lendutan (mm) Putaran sudut (deg) LV9583 (G4) LV9582 (G5) LV9580 (G6) T2031 (G4) 0,698 1,098 2 -0,002 -0,](https://thumb-ap.123doks.com/thumbv2/123dok/2517822.2226018/17.918.201.793.143.548/tabel-pengolahan-akibat-jarak-segmen-jarak-lendutan-putaran.webp)
![Tabel 4.9 Pengolahan data akibat beban truk Y4 TRUK Y4 Jarak segmen (m) Jarak as depan dari titik [0,0] (m) T (s)](https://thumb-ap.123doks.com/thumbv2/123dok/2517822.2226018/18.918.139.749.170.539/tabel-pengolahan-akibat-beban-truk-jarak-segmen-jarak.webp)
![Tabel 4.10 Perbandingan nilai lendutan akibat beban truk Y1 TRUK Y1 Beban Posisi As Depan Dari Titik [0,0] (m) Lendutan (mm)](https://thumb-ap.123doks.com/thumbv2/123dok/2517822.2226018/23.918.191.786.489.850/tabel-perbandingan-lendutan-akibat-beban-posisi-titik-lendutan.webp)
![Tabel 4.11 Perbandingan nilai lendutan akibat beban truk Y2 TRUK Y2 Beban Posisi As Depan Dari Titik [0,0] (m) Lendutan (mm)](https://thumb-ap.123doks.com/thumbv2/123dok/2517822.2226018/25.918.191.787.625.958/tabel-perbandingan-lendutan-akibat-beban-posisi-titik-lendutan.webp)
![Tabel 4.12 Perbandingan nilai lendutan akibat beban truk Y3 TRUK Y3 Beban Posisi As Depan Dari Titik [0,0] (m) Lendutan (mm)](https://thumb-ap.123doks.com/thumbv2/123dok/2517822.2226018/27.918.195.797.637.969/tabel-perbandingan-lendutan-akibat-beban-posisi-titik-lendutan.webp)
![Tabel 4.13 Perbandingan nilai lendutan akibat beban truk Y4 TRUK Y4 Beban Posisi As Depan Dari Titik [0,0] (m) Lendutan (mm)](https://thumb-ap.123doks.com/thumbv2/123dok/2517822.2226018/29.918.193.787.631.977/tabel-perbandingan-lendutan-akibat-beban-posisi-titik-lendutan.webp)