APLIKASI METODE STATE FEEDBACK
LINEARIZATION PADA SISTEM KENDALI
GERAK KAPAL
Dosen Pembimbing:
DR. Erna Apriliani M.Si
DWI ARIYANI K – 1209100044 JURUSAN MATEMATIKA ITS
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM INSTITUT TEKNOLOGI SEPULUH NOPEMBER
Abstrak
Pendahuluan Tinjauan Pustaka Metode Penelitian PembahasanAbstrak
Kapal dilengkapi dengan sistem panduan dan kendali yang harus mampu menavigasi dalam misi pengujian dengan baik agar dapat menjaga lintasan yang diinginkan. Kapal memiliki 6 derajat kebebasan (DOF). Pada Tugas Akhir ini menggunakan 3 DOF yaitu surge, sway dan yaw, yang mana dibedakan menjadi dua yaitu kendali kecepatan surge digunakan state feedback linearization dan untuk kendali sudut heading kapal dengan menggunakan PID heading Controller yang ditambahkan dengan menggunakan model reference autopilot dan feedforward term agar kapal dapat bermanuver dengan course-changing dan course-keeping yang baik. Setelah dilakukan analisa kendali selanjutnya dilakukan simulasi dengan menggunakan software Matlab.
Pendahuluan
Abstrak Tinjauan Pustaka Metode Penelitian Pembahasan
Latar Belakang
INDONESIA NEGARA KEPULAUAN
PERLINDUNGAN
SDA LAUT KAPAL PATROLI
3 SUBSISTEM: PANDUAN (GUIDANCE), NAVIGASI DAN KONTROL ATAU KENDALI PENGENDALIAN KECEPATAN DAN HEADING KAPAL STATE FEEDBACK LINEARIZATION DAN PID CONTROLLER MASALAH UTAMA DALAM KENDALI KAPAL ADALAH TRAJECTORY TRACKING DAN PATH FOLLOWING
Pendahuluan
Abstrak Tinjauan Pustaka Metode Penelitian Pembahasan
Rumusan Masalah
Bagaimana aplikasi metode state feedback linearization pada sistem kendali gerak kapal dan simulasi hasilnya
Batasan Masalah
•Model dinamika kapal yang digunakan adalah model kapal tanker “Esso Osaka”
•Data masukan yang digunakan pada simulasi adalah koefisien hidrodinamika kapal tanker Esso Osaka [3].
•Variabel yang dikendalikan adalah surge dan yaw •Simulasi menggunakan software MATLAB
Pendahuluan
Abstrak Tinjauan Pustaka Metode Penelitian Pembahasan
Tujuan
Manfaat
Mengetahui aplikasi metode
state feedback
linearization
pada sistem kendali gerak kapal dan
mengetahui bagaimana hasil dari simulasinya.
•
Menambah wawasan tentang aplikasi dari metode
state feedback linearization
untuk sistem kendali
gerak kapal.
•
Sebagai rujukan untuk sistem navigasi, panduan
Tinjauan Pustaka
Abstrak Pendahuluan Metode Penelitian Pembahasan
Model Dinamika Gerak Kapal
Gerak rotasi terdiri dari: • roll (gerakan maju)
• pitch (gerakan memutar ke depan)
• yaw (gerakan memutar ke samping)
Pada prinsipnya dinamika gerak kapal dibagi dalam enam-derajat kebebasan atau degree of freedom (DOF), yaitu: surge, sway, yaw,
heave, roll, dan pitch. Dan secara umum gerakan yang dialami
sebuah kapal ketika melaju di lautan ada dua macam, yaitu gerakan translasi dan rotasi.
Gerakan translasi terdiri dari:
• surge (maju/mundur)
• sway (kanan/kiri)
DOF Gerakan Gaya/Momen Kecepatan
linear/anguler Posisi/sudut euler 1 Ke arah sumbu- x (surge) X u x
2 Ke arah sumbu- y (sway) Y v y 3 Ke arah sumbu- z (heave) Z w z 4 Pada sumbu- x (roll) K p
5 Pada sumbu- y (pitch) M q 6 Pada sumbu- z (yaw) N r
Tinjauan Pustaka
Tinjauan Pustaka
Abstrak Pendahuluan Metode Penelitian Pembahasan
Gerakan umum dari kendaraan laut di 6 DOF dapat digambarkan sebagai vektor berikut [3]:
vektor posisi dan orientasi (koordinat bumi atau earth-fixed frame) vektor kecepatan linear dan kecepatan anguler (koordinat badan kapal atau body-fixed frame),
gaya dan momen yang bekerja pada kendaraan (koordinat badan kapal atau body-fixed frame)
Tinjauan Pustaka
Abstrak Pendahuluan Metode Penelitian Pembahasan
Pada tugas akhir ini menggunakan model kapal tanker “Esso Osaka”. Berdasarkan Abkowitz, dinamika tanker “Esso Osaka”
digambarkan oleh model yang didasarkan pada gerakan horizontal dengan variabel gerak dari surge, sway dan yaw.
Komponen depan kecepatan relatif dan komponen transversal kecepatan relatif
Tinjauan Pustaka
Abstrak Pendahuluan Metode Penelitian Pembahasan
kecepatan surge u diberikan sebagai berikut:
kecepatan sway dan turunannya terhadap waktu adalah
turunan terhadap waktu dari diberikan oleh persamaan berikut:
Tinjauan Pustaka
Abstrak Pendahuluan Metode Penelitian Pembahasan
Tinjauan Pustaka
Abstrak Pendahuluan Metode Penelitian Pembahasan
Bentuk Tak Berdimensi Persamaan Gerak Kemudi
Kapal
Prime System Percepatan
Kecepatan Posisi
Gaya atau Momen
Pada tugas akhir ini untuk bentuk normalisasi menggunakan Prime-system. Prime-System tidak dapat digunakan pada kecepatan rendah
misalnya pada dinamika posisi kapal, sebab normalisasi kecepatan u, v, w,
yang mana dapat bernilai nol pada dinamika posisi kapal. Oleh karena itu prime system banyak digunakan dalam maneuver kapal.
Tinjauan Pustaka
Abstrak Pendahuluan Metode Penelitian Pembahasan
Pada pendekatan teori slender body strip turunan koefisien hidrodinamika dapat dinyatakan sebagai fungsi dari rasio panjang terhadap lebar dari kapal, dengan dikalikan sebuah konstanta
tertentu. Smitt (1970), Norrbin (1971) dan Inoue (1981) mengembangkan suatu rumusan secara empiris dari beberapa
persamaan turunan koefisien hidrodinamika yang dikemukakan oleh Clarke (1982). Bentuk persamaan regresi tersebut dinyatakan dalam bentuk berikut:
Tinjauan Pustaka
Abstrak Pendahuluan Metode Penelitian Pembahasan
Sistem Pengendalian
Sistem pengendalian adalah suatu sistem yang bekerja dalam proses pengaturan atau pengendalian pada suatu atau beberapa besaran (variabel, parameter) sehingga berada pada suatu harga atau dalam suatu rangkuman harga (range) tertentu.
Berdasarkan jenis operator
Berdasarkan jaringannya Pengendalian secara
manual Pengendalianotomatik
Sistem Lup Tertutup Sistem Lup terbuka
Tinjauan Pustaka
Abstrak Pendahuluan Metode Penelitian Pembahasan
State Feedback Linearization
Ide dasar Freund menggunakan feedback linearization adalah untuk mengubah dinamika sistem nonlinier menjadi sistem linier. Menurut Fossen, metode Feedback linearization mudah diterapkan untuk kapal dan kendaraan bawah air ketika model dasarnya sistem nonlinear
mass-damper-spring yang mana dapat ditransformasikan menjadi sistem linear
dengan menggunakan suatu pemetaan linear. Transformasi tersebut dapat digunakan untuk aplikasi b-frame dan n-frame, dengan aplikasi b-frame dapat diartikan sebagai kontrol lintasan (tracking control) dari kecepatan sementara aplikasi n-frame untuk mengontrol posisi dan letak [5].
Tinjauan Pustaka
Abstrak Pendahuluan Metode Penelitian Pembahasan
Decoupling pada b-frame (Kecepatan)
Objektif kontrol mentransformasi dinamika kapal kedalam suatu sistem linear , dimana dapat diartikan sebagai vektor commanded
acceleration (percepatan perintah).
Dinamika kapal tak linear diberikan sebagai berikut:
dengan dan diasumsikan dapat terukur dan adalah vektor tak linear:
Tinjauan Pustaka
Abstrak Pendahuluan Metode Penelitian Pembahasan
PID Controller
PID controller merupakan algoritma kendali yang banyak
digunakan. Feedback loop atau loop umpan balik dikendalikan dengan algoritma atau salah satu bentuk kecil dari jenis ini. PID terdiri dari tiga bagian yaitu Proporsional, Integral dan
Derivatif.
Suatu bentuk PID controller untuk full state feedback adalah sebagai berikut:
Tinjauan Pustaka
Abstrak Pendahuluan Metode Penelitian Pembahasan
Teori Matematika Sistem
Jika terdapat suatu sistem linear yang berbentuk seperti berikut :
Diberikan persamaan differensial dengan matriks A berukuran nxn dan mempunyai nilai karakteristik yang berbeda . Titik asal z=0 adalah stabil asimtotik jika dan hanya jika bagian real dari untuk i=1,…, k. Titik asal adalah stabil jika bagian real untuk i=1,…,k dan jika banyaknya vektor karakteristik yang bebas linear berkaitan dengan sebanyak rangkapnya
Teorema yang berkaitan dengan kestabilan untuk sistem linear:
Tinjauan Pustaka
Abstrak Pendahuluan Metode Penelitian Pembahasan
Toerema yang berkaitan dengan keterkontrolan adalah:
“Jika diberikan persamaan ruang keadaan dari sistem seperti pada
persamaan sistem linear diatas, maka pernyataan berikut adalah ekuivalen:
1. Sistem (A, B, C, D) terkontrol
2. Matriks keterkontrolan W, yang didefinisikan:
“Jika diberikan persamaan ruang keadaan dari sistem seperti pada persamaan sistem linear diatas, maka pernyataan berikut dikatakan ekivalen:
1. Sistem (A, B, C, D) teramati
2. Matriks keteramatan V, yang didefinisikan :
Mempunyai rank V=n, dengan n adalah ordo dari matriks A”
Teorema yang berkaitan dengan keteramatan adalah:
Tinjauan Pustaka
Metode Penelitian
Abstrak Pendahuluan Tinjauan Pustaka Pembahasan
Studi Literatur
Analisis Kestabilan, Keteramatan dan Keterkontrolan Sistem
Analisis Pengendali heading dengan PID Controller
Penarikan Kesimpulan dan Saran Simulasi dan Analisis Hasil
Analisis Pengendali State Feedback Linearization
Pembahasan
Abstrak Pendahuluan Tinjauan Pustaka Metode Penelitian
Analisis Kontrol Plant dan Kestabilan Model pada Kapal
Pada sub bab ini dibahas mengenai model manuver dari sub sistem
sway-yaw yang hanya terdiri dari sifat fisik. Dengan mengansumsikan
bahwa kecepatan jelajah dari kapal yaitu u dipertahankan tetap atau konstan sedangkan v dan r diasumsikan kecil, sehingga manuver
Pembahasan
Abstrak Pendahuluan Tinjauan Pustaka Metode Penelitian
model pada persamaan (1) dapat dituliskan sebagai berikut:
Pembahasan
Abstrak Pendahuluan Tinjauan Pustaka Metode Penelitian
model pada persamaan (2) dapat dijadikan dalam bentuk:
Pembahasan
Abstrak Pendahuluan Tinjauan Pustaka Metode Penelitian
Kestabilan sistem diperoleh berdasarkan persamaan karakteristik yaitu sebagai berikut:
Didapatkan : Setelah dilakukan perhitungan, didapatkan bahwa nilai dan bernilai negatif yang menunjukkan bahwa sistem adalah stabil asimptotik.
Pembahasan
Abstrak Pendahuluan Tinjauan Pustaka Metode Penelitian
Analisis Keterkontrolan dan Keteramatan Sistem
Analisis keterkontrolan dan keteramatan sistem dilakukan pada sistem yaw dan sudut heading, yang mana model yaw didapatkan dari fungsi transfer yaitu:
Dapat dilakukan pendekatan dengan model Nomoto orde kedua yaitu sebagai berikut:
Pembahasan
Abstrak Pendahuluan Tinjauan Pustaka Metode Penelitian
persamaan dengan pendekatan model Nomoto orde pertama seperti berikut:
pendekatan orde pertama Nomoto yang mendefinisikan konstanta waktu sebagai berikut:
Pembahasan
Abstrak Pendahuluan Tinjauan Pustaka Metode Penelitian
Dengan menggunakan transformasi Laplace balik didapatkan fungsi kontinu sebagai berikut:
dengan
Persamaan tersebut dapat diubah dalam bentuk matriks seperti berikut:
Pembahasan
Abstrak Pendahuluan Tinjauan Pustaka Metode Penelitian
Dengan outputnya yaitu , sehingga dapat dituliskan dalam bentuk state space berikut:
Pembahasan
Abstrak Pendahuluan Tinjauan Pustaka Metode Penelitian
Berdasarkan teori sistem linear, sistem dikatakan terkontrol jika matriks W memiliki rank ≥ n, dimana n adalah orde matriks
Dengan nilai dan , maka didapatkan
nilai determinan matriks W ≠ 0, sehingga dapat disimpulkan bahwa matriks W memiliki rank penuh. Jadi sistem ini adalah sistem yang dapat dikontrol.
Pembahasan
Abstrak Pendahuluan Tinjauan Pustaka Metode Penelitian
Dan untuk mengetahui sistem teramati yaitu menggunakan matriks
V yaitu
jelas bahwa matriks tersebut memiliki rank penuh, sehingga dapat disimpulkan bahwa sistem teramati.
Pembahasan
Abstrak Pendahuluan Tinjauan Pustaka Metode Penelitian
Analisis Pengendali Sistem dengan Menggunakan
Pengontrol PID
Suatu bentuk kendali dengan menggunakan pengendali PID digunakan dalam kendali autopilot yaitu sebagai berikut:
adalah pengontrol momen yaw adalah eror heading
adalah konstanta proporsional gain adalah konstanta turunan waktu adalah konstanta integral waktu
Pembahasan
Abstrak Pendahuluan Tinjauan Pustaka Metode Penelitian
Untuk mengubah persamaan (3) dalam bentuk kontinyu digunakan transformasi Laplace Balik, yang menghasilkan persamaan berikut:
adalah eror yaw
Pengontrol gain dapat ditentukan melalui pole placement pada desain parameter dan melalui:
Pembahasan
Abstrak Pendahuluan Tinjauan Pustaka Metode Penelitian
Pengendalian dengan PID Controller telah didapatkan, untuk mencapai ketelitian perubahan jalur (course-changing) manuver bentuk feedforward dapat ditambahkan ke pengendali. Pengendali PID untuk full state feedback diberikan sebagai berikut:
Dengan menggunakan bentuk feedforward referensinya adalah sebagai berikut:
Sehingga bentuk pengendali PID dengan full state feedback menjadi seperti berikut:
Pembahasan
Abstrak Pendahuluan Tinjauan Pustaka Metode Penelitian
Suatu model autopilot harus mempunyai kemampuan
course-keeping dan berbelok yang baik. Oleh karena itu dibutuhkan model
referensi autopilot yang menggunakan bentuk orde ketiga sebagai berikut:
Pembahasan
Abstrak Pendahuluan Tinjauan Pustaka Metode Penelitian
Analisis Penggunaan Metode State Feedback Linearization untuk Kendali Surge
Pada bagian ini akan dilakukan analisis terhadap model surge kapal yaitu suatu gerakan koordinasi kapal diperoleh melalui
pengendalian dari kecepatan surge. Model surge kapal diberikan sebagai berikut:
Dengan mensubtitusikan
Pembahasan
Abstrak Pendahuluan Tinjauan Pustaka Metode Penelitian
Dengan merupakan suatu gaya yang bekerja pada surge, yaitu:
Pembahasan
Abstrak Pendahuluan Tinjauan Pustaka Metode Penelitian
Dengan demikian model surge pada persamaan
Bentuk tak linear tersebut dapat dihilangkan dengan memilih bentuk pengontrol seperti berikut:
dengan percepatan perintah yang dihitung dari suatu PI-kontroller pada percepatan feedforward:
Pembahasan
Abstrak Pendahuluan Tinjauan Pustaka Metode Penelitian
dinamika eror orde kedua yaitu sebagai berikut:
Dengan demikian pengontrol kecepatan surge dapat dihitung melalui :
penentuan fungsi didasarkan pada fungsi transfer filter orde kedua [3] yang ditentukan oleh:
Pembahasan
Abstrak Pendahuluan Tinjauan Pustaka Metode Penelitian
Fungsi transfer filter tersebut dapat dinyatakan secara kontinyu menggunakan transformasi Laplace balik sebagai berikut:
Persamaan diatas terlihat bahwa persamaan diferensial linear
tingkat-2 yang tak homogen, untuk itu dapat digunakan penyelesaian sebagai berikut:
Persamaan diferensial tereduksi yaitu
Persamaan diferensial lengkap yaitu
Pembahasan
Abstrak Pendahuluan Tinjauan Pustaka Metode Penelitian
Didapatkan penyelesaian PD tereduksi yaitu
Didapatkan penyelesaian PD lengkap yaitu
Dengan demikian, penyelesain umum persamaan diferensial orde kedua dari persamaan (4) adalah
Pembahasan
Abstrak Pendahuluan Tinjauan Pustaka Metode Penelitian
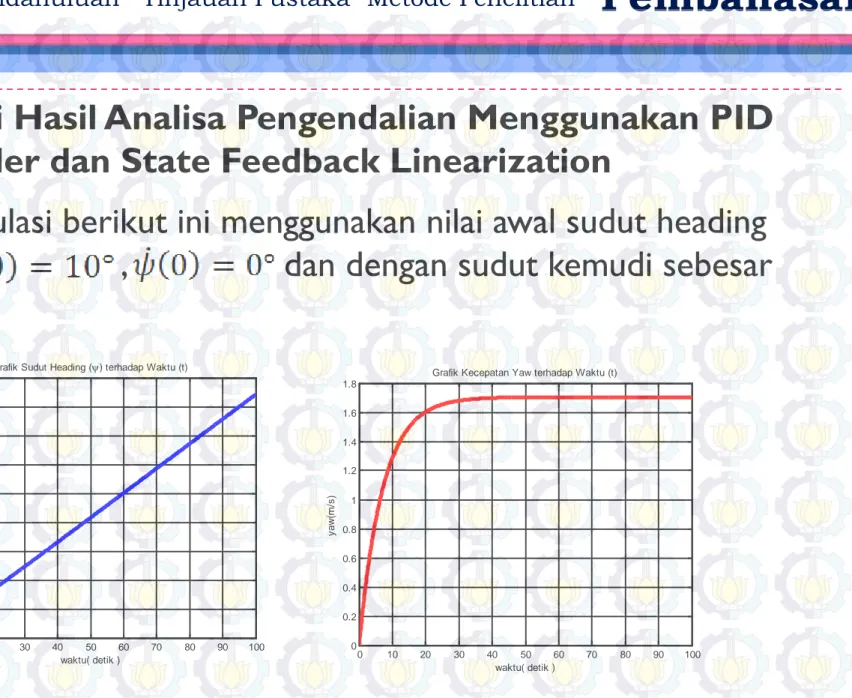
Simulasi Hasil Analisa Pengendalian Menggunakan PID Controller dan State Feedback Linearization
Pada simulasi berikut ini menggunakan nilai awal sudut heading yaitu , dan dengan sudut kemudi sebesar
0 10 20 30 40 50 60 70 80 90 100 0 20 40 60 80 100 120 140 160 180 waktu( detik ) ψ (deg)
Grafik Sudut Heading (ψ) terhadap Waktu (t)
0 10 20 30 40 50 60 70 80 90 100 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 waktu( detik ) y a w (m /s )
Pembahasan
Abstrak Pendahuluan Tinjauan Pustaka Metode Penelitian
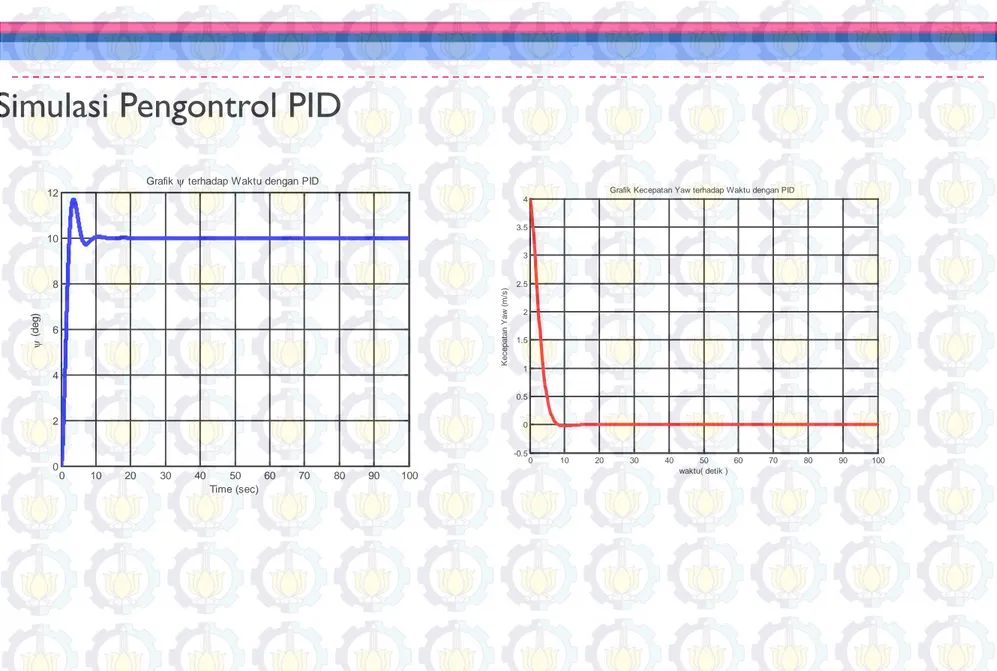
Simulasi Pengontrol PID
0 10 20 30 40 50 60 70 80 90 100 0 2 4 6 8 10 12 Time (sec) ψ ( deg)
Grafik ψ terhadap Waktu dengan PID
0 10 20 30 40 50 60 70 80 90 100 -0.5 0 0.5 1 1.5 2 2.5 3 3.5 4 waktu( detik ) K ec epat an Y aw ( m /s )
Pembahasan
Abstrak Pendahuluan Tinjauan Pustaka Metode Penelitian
Simulasi Pengendalian Kecepatan Surge dengan Menggunakan State Feedback Linearization
Pada simulasi ini juga menggunakan nilai awal dan nilai kecepatan arus 0 10 20 30 40 50 60 70 80 90 100 -0.7 -0.6 -0.5 -0.4 -0.3 -0.2 -0.1 0 waktu( detik ) τ (K g m 2/s )
Grafik τ Tanpa Kendali
0 10 20 30 40 50 60 70 80 90 100 -5 0 5 10 15 20x 10 6 Kendali Torsi Waktu (detik) τ (K g m 2/s )
Kesimpulan
•Model dinamika kapal untuk model sway dan yaw merupakan sistem yang stabil, yang dapat dikontrol dan diamati.
•Model heading kapal yang berasal dari fungsi transfer yaw dapat dikendalikan dengan menggunakan PID Controller dan untuk bentuk tak linear dari model kecepatan surge dikendalikan dengan state feedback linearization.
•Hasil simulasi menunjukkan bahwa sudut heading saat tidak diberi kendali PID, mengalami kenaikan secara terus menerus. Sedangkan kecepatan yaw sudah stabil menuju nilai 1,7 m/s.
•Hasil simulasi menunjukkan bahwa sudut heading ketika diberi kendali PID, dapat tetap menuju nilai yang ditentukan. Sedangkan kecepatan yaw menuju nilai nol ketika diberi pengendali.
•Hasil simulasi juga menunjukkan bahwa kecepatan tanpa pengendali mengalami penurunan, sedangkan setelah menggunakan pengendali State Fedback Linearization, kecepatan stabil menuju ke nol.
Saran
• Pada tugas akhir ini penulis tidak menunjukkan hasil simulasi
dari path following maupun trajectori tracking, sehingga untuk
penelitian selanjutnya bisa ditambahkan.
• Untuk penelitian selanjutnya dapat menggunakan metode State Feedback Linearization untuk penentuan kontrol posisi kapal, dapat juga ditambahkan dengan metode Adaptif State Feedback
DAFTAR PUSTAKA
[1] “Sumberdaya Laut Indonesia Dan Pengelolaannya”.
http://www.indonesia.bg/indonesian/indonesia/index.htm.Diakses tanggal 28 Agustus 2012.
[2] “Nama-Nama Kapal dan Jenis Jenis kapal Di Dunia Pelayaran”.
{http://informasipelaut.blogspot.com/2011/06/nama-nama-kapal-dan-jenis-jenis-kapal.html}. Diakses tanggal 09 Agustus 2012.
[3] Moreira, Lu´cia, Fossen, Thor I., Soares, C. Guedes. (2007). “Path following control system for a tanker ship model”.Ocean Engineering, Vol 34, Hal. 2074–2085.
[4] Sari D. P. (2011). “Perancangan Sistem Pengendalian Dan Monitoring Untuk Menghindari Tabrakan Antar Kapal Di Alur Pelayaran Tanjung Perak Surabaya”. Tugas Akhir, Jurusan Teknik Fisika, ITS.
[5] Fossen, Thor I.(2002). ”Marine Control Systems Guidance Navigation and Control of Ships Rigs and Underwater Vehicles”.
[6] Sholikhah, Siti Aminatus. (2012). “Penerapan Model Predictive Control (Mpc) Pada Kapal Autopilot Dengan Lintasan Tertentu”.Tugas Akhir, Jurusan Matematika, ITS.
[7] Rizkiani, Isti. (2012). “Analisis Dan Simulasi Konversi Energi Angin Menjadi Energi Listrik Menggunakan MetodeFeedback Linearization Control”.Tugas Akhir, Jurusan Matematika, ITS.
[8] McGookin, Euan W., Smith, David J. Murray., Li, Yun., Fossen, Thor I. (1999). “Ship Steering Control System Optimisation using Genetic Algorithms”.Control Engineering Practice 8, Hal. 429-443.
[9] Souza, Carlos Eduardo Silva de., Oshiro, Anderson Takehiro., Morishita, Helio Mitio. (2010). “Cooperative Control Applied to Coordinated Operations of Ships with Dynamic Positioning System”. Department of Naval Architecture and Ocean Engineering University of Sao Paulo.