KONTROL SUHU PADA RUANGAN SECARA WIRELESS
DENGAN PEMOGRAMAN CODEVISION AVR BERBASIS
ANDROID
TUGAS AKHIR
TENGKU ADETYA NURHALIZA
142408019
PROGRAM STUDI D-III FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
KONTROL SUHU PADA RUANGAN SECARA WIRELESS
DENGAN PEMOGRAMAN CODEVISION AVR BERBASIS
ANDROID
TUGAS AKHIR
Diajukan untuk melengkapi tugas dan memenuhi syarat memperoleh Ahli Madya
TENGKU ADETYA NURHALIZA
142408019
PROGRAM STUDI D-III FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
LEMBAR PERSETUJUAN
Judul : KONTROL SUHU PADA RUANGAN SECARA
WIRELESS DENGAN PEMOGRAMAN CODEVISION AVR BERBASIS ANDROID
Kategori : Tugas Akhir
Nama : TENGKU ADETYA NURHALIZA
Nim : 142408019
Program Studi : Diploma 3 (D-III) Fisika Departemen : Fisika
Fakultas : Matematika Dan IlmuPengetahuan Alam Universitas Sumatera Utara
Disetujui di Medan, Maret 2017
Disetujui Oleh
Ketua Program Studi Pembimbing
PERNYATAAN
KONTROL SUHU PADA RUANGAN SECARA WIRELESSDENGAN PEMOGRAMAN CODEVISION AVR BERBASIS ANDROID
TUGAS AKHIR
Sayamengakuibahwatugasakhiriniadalahhasilkaryasendiri.Kecualibeberapakutipa ndanringkasan yang masing-masingdisebutkansumbernya.
Medan, 30 Maret 2017
ABSTRAK
Telah dilakukan perancangan dan realisasi sistem. Alat ini dapat dimanfaatkan sebagai sistem pemantau serta control otomatis pada temperatur ruangan.Sistem ini terdiri atas Hardware dan software. Hardware terdiri atas sebuah mikrokontroler, sensor LM35,LCD (Liquid Cristal Display),ADC(Analog to Digital Converter),driver kipas,rangkaian keypad. Software pada sistem ini dibuat dengan menggunakan program CodeVisionAVR. Pada Software Codevision AVR memprogram aplikasi ini dan bekerjapada saat dinyalakan maka inisilisasi hardware dilakukan kemudian menampilkan temperatur yang terdeteksi oleh LM35 pada LCD. Memasukkan Setpoint melalui keypad dan proseseksekusi dilakukan oleh mikrokontroler untuk menentukan mati/hidup sistem pendingin ruangan. Setelah setpoint dimasukkan maka nilai setpoint dibandingkan temperatur sebenarnyajika setpoint lebih besar maka kipas akan berputar dan sebaliknya jika setpoint lebih kecil maka kecepatan kipasakan menurun secara otomatis. Temperatur yang bisa dikendalikan oleh alat pengontroltemperatur. Keadaan temperatur lingkungan (±23ºC) sampai dengan 31º Celcius.
KATA PENGHARGAAN
Puji dan Syukur penulis panjatkan kepada Allah SWT,dengandilimpahan
berkatNya penyusunan Tugas Akhir ini dapat diselesaikan.
Ucapan terima kasih penulis sampaikan Kepada berbagai pihak yang telah banyak membantu penulis dalam penyelesaikan Laporan Tugas Akhir ini yaitu
Kepada:
1. Bapak Dr. Kerista Sebayang, MS, selaku Dekan Fakultas Matematika
dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
2. Bapak Drs. Takdir Tamba,M.Eng.Sc selaku Ketua Program Studi D-III Fisika FakultasMIPA Universitas Sumatra Utara .
3. Bapak Prof. Dr. Nasruddin Noer,M.Eng.Sc, selaku Pembimbing yang
telah membimbing dan mengarahkan Kepada Penulis dalam menyelesaikan Laporan Tugas Akhir ini .
4. Seluruh Staf Pengajar/Pegawai Program Studi FakultasMatematika dan Ilmu Pengetahuan Alam Universitas Sumatra Utara .
5. Ayahanda dan Ibunda tercinta yang telah memberikan bantuan berupa
dukungan moril dan material yang sangat membantu dalam menyelesaikan Laporan Tugas Akhir.
6. Senior kami Fatuhrrahman yang telah memberikan bantuan berupa Ilmu dan Motivasi dalam menyelesaikan Laporan Tugas Akhir.
7. Rekan Fisika Instrumentasi D-III yang memberikan bantuan penulisan
Penulis menyadari bahwa penyusunan Laporan Tugas Akhir ini masih terdapat banyak kekurangan dan kelemahan. Untuk itu penulis mengharapkan kritik dan
saran dari semua pihak guna penyempurnaan laporan dimasa yang akan datang. Akhir kata, semoga Laporan ini dapat bermanfaat bagi rekan-rekan Mahasiswa dan pembaca sekalian demi menambah pengetahuan tentang Laporan
Tugas Akhir.
Medan,30Maret 2017
DAFTAR ISI
Halaman
ABSTRAK... i
KATA PENGANTAR... ii
DAFTAR ISI... iv
DAFTAR GAMBAR... vi
DAFTAR TABEL……… vii
BAB I PENDAHULUAN………. 1
1.1.Latar Belakang………. 1
1.2.Rumusan Masalah……… 2
1.3.Tujuan Penelitian………. 2
1.4.Batasan Masalah………. 2
1.5.Metode Penulisan……… 2
1.6.Sistematika Penulisan……… 3
BAB II LANDASAN TEORI……….. 4
2.1.Mikrokontroler AVR Atmega 8……….. 4
2.1.1.Konfigurasi Pin Atmega 8………. 5
2.1.2.Spesifikasi Atmega 8……….. 7
2.1.3.Memori AVR Atmega 8………. 9
2.1.4.Komunikasi Serial Pada Atmega 8……… 10
2.1.5.Sistem Minimum Atmega 8……… 11
2.2.Modul Bluetooth HC-05 ……… 11
2.4Sensor Temperatur LM35……….. 15
2.5 LCD……… 16
BAB III PERANCANGAN DAN PEMBUATAN………. 21
3.1.Diagram Blok Sistem……… 21
3.1.1.Fungsi-Fungsi Diagram Blog………. 21
3.2.Rangkaian Reguler 7805……… 21
3.3.Rangkaian Mikrokontroler Atmega 8……….. 22
3.4.Rangkaian LCD……….... 23
3.5.Rangkaian Sensor LM35 ……….. 24
3.6.Flowchat Sistem ………. 25
BAB IV PENGUJIAN DAN HASIL………. . 26
4.1.Pengujian Rangkaian Regulator 7805………. 26
4.2.Pengujian Rangkaian Mikrokontroler……….. 26
4.3.Pengujian Rangkaian LCD………. 27
4.4.Pengujian Rangkaian Sensor LM35……… 28
4.5Hasil Pengujian Percobaan pada Sensor LM35…… 37
BAB V PENUTUP……….………. 41
5.1.Kesimpulan……… 41
5.2.Saran………... 41
DAFTAR GAMBAR
Halaman
2.1.Konfigurasi Pin Atmega 8……….. 6
2.2. Modul Bluetooth HC- 05……… 13
2.3. LCD………... 17
2.4. Konfigurasi Pin LCD ……….… 18
3.1.Diagram Blok System……….. . 22
3.2.Rangkaian Reguler 7805………... 23
3.3.Rangkaian Mikrokontroler Atmega 8……… .. 24
3.4.Rangkaian LCD………. .. 25
3.5.Rangkaian Sensor LM35 ……… .. 25
3.6.Flowchat Sistem …………..………. .. 26
4.1.Informasi Signatur Mikrokontroler……… .. 27
DAFTAR TABEL
Halaman
2.1.Operasi Dasar LCD……… 19
2.2.Konfigurasi LCD…….……… 19
2.3.Konfigurasi Pin LCD………. 19
BAB I PENDAHULUAN 1.1Latar Belakang
Mengurangi pemakaian energi dan kenyamanan merupakan dua pertimbangan yang saling bertolak belakang. Bagi sebagian orang tidak dapat lepas dari
keberadaan alat pendingin ruangan, terlebih bagi yang bekerja atau tinggal di gedung-gedung yang bertingkat. Pendingin ruangan digunakan untuk membuat
temperatur udara di dalam suatu ruangan menjadi nyaman karena kemampuan alat tersebut yang mampu mengubah suhu (temperatur) udara dan kelembaban sesuai yang kita kehendaki.
Teknologi sekarang sangat memegang peranan penting. teknologi yang modern harus mencakup secara sinergi antara efisiensi biaya, sumber daya alam
serta sumber daya manusianya. Jika salah satu diabaikan akan timbul masalah dikemudian hari.
Pengaturan pengendalian secara otomatis diberbagai bidang pada saat ini
sering dikembangkan diantaranya adalah aplikasi pengendalian temperatur yang banyak ditemui. Tujuan dari Tugas Akhir ini adalah sistem pengontrolan
temperatur di ruangan yang bisa diset dan ditampilkan. Sistem yang dibuat ini memanfaatkan kemampuan mikrokontroler ATMega8 dalam akuisisi data dan mengambil keputusan. Kawasan temperatur yang bisa dikendalikan adalah
keadaan temperatur lingkungan sampai dengan 24º Celcius.
Keuntungan dari sistem ini adalah komponen rangkaian yang banyak
langsung pada layar LCD, penyetingan temperatur sesuai keinginan dengan memasukkan setpoint pada keypad, kemudahan dalam pengoperasian. Sistem
pengontrolan pada alat yang dirancang adalahmenggunakan sistem pengatur ON OFF melalui android dan mikrokontroler digunakan sebagai pusat untuk kontrol proses.
1.2Rumusan Masalah
Berdasarkan permasalahan yang terdapat dalam latar belakang maka pada
penelitian yang ditujukan untuk bagaimana merancang, mengaplikasikan dan mengontrol sistem miktronkontroler ATMega8 untuk pengontrolan temperatur dalam ruangan.
1.3.Tujuan Penelitian
Adapun tujuan dari dibuatnya alat ini adalah :
1. Mengaplikasikan sistem mikrokontroler ATMega8 untuk pengontrolantemperatur udara pada ruangan.
2. Mengembangkan ilmu pengetahuan dan teknologi, khususnya dibidang sistem kendali alat dan mengimplementasikan ilmu yang didapat selama
kuliah agar lebih bermanfaat.
1.4 Batasan Masalah
Batasan masalah yang digunakan dalam tugas akhir ini adalah :
1. Sensor temperatur yang digunakan yaitu menggunakan sensor LM35.
3. Ketika suhu ruangan sudah mencapai 24 0C maka kecepatan kipas akan menurun secara otomatis
4. Program yang digunakan adalah Codevision AVR.
1.5 Metode Penulisan
Adapun metode penulisan yang digunakan dalam menyusun dan menganalisa Tugas Akhir ini adalah:
1. Studi literatur yang berhubungan dengan perancanangan dan pembuatan alat ini.
2. Perencanaan dan pembuatan alat
Merencanakan peralatan yang telah dirancang baik software maupun hardware.
3. Pengujian alat
Peralatan yang telah dibuat kemudian diuji apakah telah sesuai dengan yang telah direncanakan.
1.6 Sistematika Penulisan
Untuk mempermudah penyusunan laporan, maka dalam hal ini penulis membagi dalam beberapa bab, serta memberikan gambaran secara garis besar isi dari tiap-tiap bab.
BAB I : PENDAHULUAN
Bab ini berisikan latar belakang, rumusan masalah, tujuan penelitian, batasan
Bab ini merupakan landasan teori yang membahas tentang teoriteori yang mendukung dalam penyelesaian masalah.
BAB III : METODOLOGI PENELITIAN
Meliputi metode, bahan alat, perancangan dan pengambilan data penelitian.
BAB IV : HASIL dan ANALISA
Meliputi hasil penelitian dan pembahasan. BAB V : KESIMPULAN dan SARAN
BAB II
LANDASAN TEORI 2.1 Mikrokontroler AVR Atmega8
AVR merupakan salah satu jenis mikrokontroler yang di dalamnya terdapat berbagai macam fungsi. Perbedaannya pada mikro yang pada umumnya
digunakan seperti MCS51 adalah pada AVR tidak perlu menggunakan oscillator eksternal karena di dalamnya sudah terdapat internal oscillator. Selain itu
kelebihan dari AVR adalah memiliki Power-On Reset, yaitu tidak perlu ada tombol reset dari luar karena cukup hanya dengan mematikan supply, maka secara otomatis AVR akan melakukan reset. Untuk beberapa jenis AVR terdapat
beberapa fungsi khusus seperti ADC, EEPROM sekitar 128 byte sampai dengan 512 byte. AVR ATmega8 adalah mikrokontroler CMOS 8-bit berarsitektur AVR
RISC yang memiliki 8K byte in-System Programmable Flash. Mikrokontroler dengan konsumsi daya rendah ini mampu mengeksekusi instruksi dengan kecepatan maksimum 16MIPS pada frekuensi 16MHz. Jika dibandingkan dengan
ATmega8L perbedaannya hanya terletak pada besarnya tegangan yang diperlukan untuk bekerja. Untuk ATmega8 tipe L, mikrokontroler ini dapat bekerja dengan
2.1.1. Konfigurasi Pin Atmega8
Gambar 2.1. Konfigurasi Pin ATmega 8
Atmega8 ATmega8 memiliki 28 Pin, yang masing-masing pin nya
memiliki fungsi yang berbeda-beda baik sebagai port maupun fungsi yang lainnya. Berikut akan dijelaskan fungsi dari masing-masing kaki ATmega8.
a. VCC
Merupakan supply tegangan digital. b. GND
Merupakan ground untuk semua komponen yang membutuhkan grounding.
c. Port B (PB7...PB0)
Didalam Port B terdapat XTAL1, XTAL2, TOSC1, TOSC2. Jumlah Port B adalah 8 buah pin, mulai dari pin B.0 sampai dengan B.7. Tiap pin dapat
digunakan sebagai input maupun output. Port B merupakan sebuah 8-bit bi-directional I/O dengan internal pull-up resistor. Sebagai input, pin-pin 7
mengeluarkan arus jika pull-up resistor diaktifkan. Khusus PB6 dapat digunakan sebagai input Kristal (inverting oscillator amplifier) dan input
ke rangkaian clock internal, bergantung pada pengaturan Fuse bit yang digunakan untuk memilih sumber clock. Sedangkan untuk PB7 dapat digunakan sebagai output Kristal (output oscillator amplifier) bergantung
pada pengaturan Fuse bit yang digunakan untuk memilih sumber clock. Jika sumber clock yang dipilih dari oscillator internal, PB7 dan PB6 dapat
digunakan sebagai I/O atau jika menggunakan Asyncronous Timer/Counter2 maka PB6 dan PB7 (TOSC2 dan TOSC1) digunakan untuk saluran input timer.
d. Port C (PC5…PC0)
Port C merupakan sebuah 7-bit bi-directional I/O port yang di dalam
masingmasing pin terdapat pull-up resistor. Jumlah pin nya hanya 7 buah mulai dari pin C.0 sampai dengan pin C.6. Sebagai keluaran/output port C memiliki karakteristik yang sama dalam hal menyerap arus (sink) ataupun
mengeluarkan arus (source). e. RESET/PC6
Jika RSTDISBL Fuse diprogram, maka PC6 akan berfungsi sebagai pin I/O. Pin ini memiliki karakteristik yang berbeda dengan pin-pin yang terdapat pada port C lainnya. Namun jika RSTDISBL Fuse tidak
diprogram, maka pin ini akan berfungsi sebagai input reset. Dan jika level tegangan yang masuk ke pin ini rendah dan pulsa yang ada lebih pendek
f. Port D merupakan 8-bit bi-directional I/O dengan internal pull-up resistor. Fungsi dari port ini sama dengan port-port yang lain. Hanya saja pada port
ini tidak terdapat kegunaan-kegunaan yang lain. Pada port ini hanya berfungsi sebagai masukan dan keluaran saja atau biasa disebut dengan I/O.
g. AVcc
Pin ini berfungsi sebagai supply tegangan untuk ADC. Untuk pin ini harus
dihubungkan secara terpisah dengan VCC karena pin ini digunakan untuk analog saja. Bahkan jika ADC pada AVR tidak digunakan tetap saja disarankan untuk menghubungkannya secara terpisah dengan VCC. Jika
ADC digunakan, maka AVcc harus dihubungkan ke VCC melalui low pass filter.
h. AREF
Merupakan pin referensi jika menggunakan ADC.
2.1.2 SPESIFIKASI Atmega 8
1. Kinerja tinggi, rendah daya Atmel®AVR® 8-bit Microcontroller
2. Advanced RISC Architecture
a. 130 Instruksi Powerfull - Kebanyakan Single-jam Siklus Eksekusi b. 32 × 8 General Purpose Kerja Register
c. Operasi Fully Static
d. Sampai dengan 16MIPS throughput di 16MHz
e. On-chip 2-siklus Multiplier
a. 8Kbytes In-System Self-programmable memori program flash b. 512bytes EEPROM
c. SRAM 1Kbyte internal
d. Menulis / Erase Cycles: 10.000 Flash / 100.000 EEPROM e. Data retensi: 20 tahun pada 85 ° C / 100 tahun pada 25 ° C (1)
f. Opsional Boot Kode Bagian dengan Independent Lock Bits g. In-System Programming secara On-chip Program Boot
h. Benar Operasi Baca-Sementara-Write
i. Kunci Pemrograman untuk Security Software
4. Fitur Peripheral
a. Dua 8-bit Timer / Counter dengan Prescaler terpisah, satu
Bandingkan Modus
b. Satu 16-bit Timer / Counter dengan Prescaler terpisah, Bandingkan Mode, dan Tangkap
c. Mode
d. Real Time Counter dengan Oscillator terpisah
e. Tiga Saluran PWM
f. 8-channel ADC di TQFP dan QFN / MLF paket g. Delapan Saluran 10-bit Akurasi
h. 6-channel ADC dalam paket PDIP i. Enam Saluran 10-bit Akurasi
l. Master / Slave SPI Serial Interface
m. Programmable Watchdog Timer dengan terpisah On-chip
Oscillator
n. On-chip Analog Comparator 5. Fitur Mikrokontroler Khusus
a. Power-on ulang dan Programmable Brown-out Detection b. Internal dikalibrasi RC Oscillator
c. Eksternal dan Sumber Interrupt internal
d. Lima Mode Sleep: Idle, ADC Noise Reduction, Power-save, Power-down, dan
e. Bersiap 6. I / O dan Paket
a. 23 Programmable I / O Garis
b. 28-lead PDIP, 32-lead TQFP, dan 32-pad QFN / MLF 7. Tegangan Operasi
a. 2.7V - 5.5V (ATmega8L) b. 4.5V - 5.5V (ATmega8)
8. Kelas Kecepatan
a. 0 - 8MHz (ATmega8L) b. 0 - 16MHz (ATmega8)
9. Konsumsi Daya di 4Mhz, 3V, 25C
a. Aktif: 3.6mA
2.1.3. Memori AVR Atmega 8
Memori atmega terbagi menjadi tiga yaitu :
1. Memori Flash Memori flash adalah memori ROM tempat kode-kode program berada. Kata flash menunjukan jenis ROM yng dapat ditulis dan dihapus secara elektrik. Memori flash terbagi menjadi dua bagian yaitu
bagian aplikasi dan bagian boot. Bagian aplikasi adalah bagian kode-kode program apikasi berada. Bagian boot adalah bagian yang digunakan
khusus untuk booting awal yang dapat diprogram untuk menulis bagian aplikasi tanpa melalui programmer/downloader, misalnya melalui USART. 32 General purpose registers 64 I/O registers Additional I/O
registers Internal RAM Flash Boot Section EEPROM 13.
2. Memori Data Memori data adalah memori RAM yang digunakan untuk
keperluan program. Memori data terbagi menjadi empat bagian yaitu : 32 GPR (General Purphose Register) adalah register khusus yang bertugas untuk membantu eksekusi program oleh ALU (Arithmatich Logic Unit),
dalam instruksi assembler setiap instruksi harus melibatkan GPR.Dalam istilah processor komputer sahari-hari GPR dikenal sebagai “chace
memory”. I/O register dan Aditional I/O register adalah register yang difungsikan khusus untuk mengendalikan berbagai pheripheral dalam mikrokontroler seperti pin port, timer/counter, usart dan lain-lain. Register
3. EEPROM EEPROM adalah memori data yang dapat mengendap ketika chip mati (off), digunakan untuk keperluan penyimpanan data yang tahan
terhadap gangguan catu daya. 14 2.1.3 Timer/Counter 0 Timer/counter 0 adalah sebuah timer/counter yang dapat mencacah sumber pulsa/clock baik dari dalam chip (timer) ataupun dari luar chip (counter) dengan
kapasitas 8-bit atau 256 cacahan. Timer/counter dapat digunakan untuk : 1. Timer/counter biasa
2. Clear Timer on Compare Match (selain Atmega 8) 3. Generator frekuensi (selain Atmega 8)
4. Counter pulsa eksternal
2.1.4. Komunikasi Serial Pada Atmega 8
Mikrokontroler AVR Atmega 8 memiliki Port USART pada Pin 2 dan Pin3 untuk melakukan komunikasi data antara mikrokontroler dengan mikrokontroler ataupun mikrokontroler dengan komputer. USART dapat
difungsikan sebagai transmisi data sinkron, dan asinkron. Sinkron berarti clock yang digunakan antara transmiter dan receiver satu sumber clock. Sedangkan
asinkron berarti transmiter dab receiver mempunyai sumber clock sendiri-sendiri. USART terdiri dalm tiga blok yaitu clock generator, transmiter, dan receiver.
2.1.5. Sistim Minimum Atmega 8
Dengan menggunakan minimum sistem yang kompatibel dengan
downloader tersebut bisa berupa downloader paralel atau serial dengan tools programmernya menggunakan Ponkemudian sediakan USBASP (Downloader)
yang lain untuk mendownload firmware ke atmega8. (Downloader tidak harus
yang berbasis USBASP bisa yang lain asal kompatibel dengan MOSI,MISO,SCK dan reset mikrokontroler AVR).
2.2 Modul Bluetooth HC-05
Modul bluetooth seri HC memiliki banyak jenis atau varian, yang secara garis besar terbagi menjadi dua yaitu jenis ‘industrial series’ yaitu HC-03 dan HC-04 serta ‘civil series’ yaitu HC-05 dan HC-06. Modul Bluetooth serial,
yang selanjutnya disebut dengan modul BT saja digunakan untuk mengirimkan data serial TTL via bluetooth.Modul BT ini terdiri dari dua jenis
yaitu Master dan Slave.
Seri modul BT HC bisa dikenali dari nomor serinya, jika nomer serinya genap maka modul BT tersebut sudah diset oleh pabrik, bekerja sebagai slave
atau master dan tidak dapat diubah mode kerjanya, contoh adalah HC-06-S. Modul BT ini akan bekerja sebagai BT Slave dan tidak bisa diubah menjadi
Master, demikian juga sebaliknya misalnya HC-04M. Default mode kerja untuk modul BT HC dengan seri genap adalah sebagai Slave.Sedangkan modul BT HC dengan nomer seri ganjil, misalkan HC-05, kondisi default
biasanya diset sebagai Slave mode, tetapi pengguna bisa mengubahnya menjadi mode Master dengan AT Command tertentu.
HC-06 tidak bisa mengganti mode karena sudah diset oleh pabrik, selain itu tidak banyak AT Command dan fungsi yang bisa dilakukan pada modul
tersebut. Diantaranya hanya bisa mengganti nama, baud rate dan password saja, Sedangkan untuk modul HC-05 memiliki kemampuan lebih yaitu bisa diubah mode kerjanya menjadi Master atau Slave serta diakses dengan lebih
banyak AT Command, modul ini sangat direkomendasikan, terutama dengan flexibilitasnya dalam pemilihan mode kerjanya.
Modul HC-05 adalah modul bluetooth yang dapat berfungsi sebagai master atau sebagai slave. modul HC-05 memiliki dua mode kerja yaitu mode AT Command dan mode Data. Modul HC-05 menggunakan mode Data secara
default. Berikut ini adalah keterangan untuk kedua mode tersebut:
• AT Command. Pada mode ini, modul HC-05 akan menerima instruksi
berupa perintah AT Command. Mode ini dapat digunakan untuk mengatur konfigurasi modul HC-05. Perintah AT Command yang dikirimkan ke modul HC-05 menggunakan huruf kapital dan diakhiri dengan karakter
CRLF (\r\n atau 0x0d 0x0a dalam heksadesimal).
• Data. Pada mode ini, modul HC-05 dapat terhubung dengan perangkat
bluetooth lain dan mengirimkan serta menerima data melalui pin TX dan RX. Konfigurasi koneksi serial pada mode ini menggunakan baudrate: 9600 bps, data: 8 bit, stop bits: 1 bit, parity: None, handshake: None.
Gambar 2.2. Modul Bluetooth HC-05
Keterangan pin out di atas adalah sebagai berikut:
• EN fungsinya untuk mengaktifkan mode AT Command Setup pada modul
HC-05. Jika pin ini ditekan sambil ditahan sebelum memberikan tegangan ke modul HC-05, maka modul akan mengaktifkan mode AT Command
Setup. Secara default, modul HC-05 aktif dalam mode Data.
• Vcc adalah pin yang berfungsi sebagai input tegangan. Hubungkan pin ini
dengan sumber tegangan 5V.
• GND adalah pin yang berfungsi sebagai ground. Hubungkan pin ini
dengan ground pada sumber tegangan.
• TX adalah pin yang berfungsi untuk mengirimkan data dari modul ke
perangkat lain (mikrokontroler). Tegangan sinyal pada pin ini adalah 3.3V sehingga dapat langsung dihubungkan dengan pin RX pada arduino karena
tegangan sinyal 3.3V dianggap sebagai sinyal bernilai HIGH pada arduino.
• RX adalah pin yang berfungsi untuk menerima data yang dikirim ke
tegangan jika menghubungkan pin ini dengan arduino yang bekerja pada tegangan 5V. Pembagi tegangan tersebut menggunakan 2 buah resistor.
Resistor yang digunakan sebagai pembagi tegangan pada tutorial ini adalah 1K ohm dan 2K ohm. Untuk lebih jelasnya, dapat dilihat pada bagian implementasi koneksi antara modul HC-05 dan arduino UNO.
• STATE adalah pin yang berfungsi untuk memberikan informasi apakah
modul terhubung atau tidak dengan perangkat lain.
2.3. PWM
PWM ( Pulse Width Modulation) adalah salah satu teknik modulasi
dengan mengubah lebar pulsa (duty cylce) dengan nilai amplitudo dan frekuensi yang tetap. Satu siklus pulsa merupakan kondisi high kemudian berada di zona
transisi ke kondisi low. Lebar pulsa PWM berbanding lurus dengan amplitudo sinyal asli yang belum termodulasi. Duty Cycle merupakan representasi dari kondisi logika high dalam suatu periode sinyal dan di nyatakan dalam bentuk (%)
dengan range 0% sampai 100%, sebagai contoh jika sinyal berada dalam kondisi high terus menerus artinya memiliki duty cycle sebesar 100%. Jika waktu sinyal
keadaan high sama dengan keadaan low maka sinyal mempunyai duty cycle sebesar 50%.
Aplikasi penggunaan PWM biasanya ditemui untuk pengaturan kecepatan
motor dc, pengaturan cerah/redup LED, dan pengendalian sudut pada motor servo. Contoh penggunaan PWM pada pengaturan kecepatan motor dc semakin
putaran motor. Apabila nilai duty cylce-nya kecil maka motor akan bergerak lambat.
Untuk membandingkannya terhadap tegangan DC, PWM memiliki 3 mode operasi yaitu :
1. mode inverted
Pada mode inverted ini jika nilai sinyal lebih besar dari pada titik pembanding (compare level) maka output akan di set high (5v) dan
sebaliknya jika nilai sinyal lebih kecil maka output akan di set low (0v) seperti pada gelombang A pada gambar di atas.
2. Non Inverted Mode
Pada mode non inverted ini output akan bernilai high (5v) jika titik pembanding (compare level) lebih besar dari pada nilai sinyal dan
sebaliknya jika bernilai low (0v) pada saat titik pembanding lebih kecil dari nilai sinyal seperti pada gelombang B pada gambar di atas.
3. Toggle Mode
Pada mode toggle output akan beralih dari nilai high (5v) ke nilai low (0v) jika titik pembanding sesuai dan sebaliknya beralih dari nilai low ke high.
2.4. Sensor Temperatur LM35
Sensor suhu LM35 adalah komponen elektronika yang memiliki fungsi
untuk mengubah besaran suhu menjadi besaran listrik dalam bentuk tegangan. Sensor Suhu LM35 yang dipakai dalam penelitian ini berupa komponen
dengan sensor suhu yang lain, LM35 juga mempunyai keluaran impedansi yang rendah dan linieritas yang tinggi sehingga dapat dengan mudah dihubungkan
dengan rangkaian kendali khusus serta tidak memerlukan penyetelan lanjutan.
Meskipun tegangan sensor ini dapat mencapai 30 volt akan tetapi yang diberikan kesensor adalah sebesar 5 volt, sehingga dapat digunakan dengan catu
daya tunggal dengan ketentuan bahwa LM35 hanya membutuhkan arus sebesar 60 µA hal ini berarti LM35 mempunyai kemampuan menghasilkan panas
(self-heating) dari sensor yang dapat menyebabkan kesalahan pembacaan yang rendah yaitu kurang dari 0,5 ºC pada suhu 25 ºC .
2.5. LCD
LCD merupakan salah satu perangkat penampil yang sekarang ini mulai banyak digunakan.Penampil LCD mulai dirasakan menggantikan fungsi dari
penampil CRT (Cathode Ray Tube), yang sudah berpuluh-puluh tahun digunakan manusia sebagai penampil gambar/text baik monokrom (hitam dan putih), maupun yang berwarna.Teknologi LCD memberikan keuntungan dibandingkan
dengan teknologi CRT, kaena pada dasarnya, CRT adalah tabung triode yang digunakan sebelum transistor ditemukan.
Beberapa keuntungan LCD dibandingkan dengan CRT adalah konsumsi daya yang relative kecil, lebih ringan, tampilan yang lebih bagus, dan ketika berlama-lama di depan monitor, monitor CRT lebih cepat memberikan kejenuhan
Gambar 2.3.LCD
LCD memanfaatkan silicon atau gallium dalam bentuk Kristal cair sebagai
pemendar cahaya.Pada layar LCD, setiap matrik adalah susunan dua dimensi piksel yang dibagi dalam baris dan kolom.Dengan demikian, setiap pertemuan baris dan kolom adalah sebuah LED terdapat sebuah bidang latar (backplane),
yang merupakan lempengan kaca bagian belakang dengan sisi dalam yang ditutupi oleh lapisan elektroda trasparan.Dalam keadaan normal, cairan yang
digunakan memiliki warna cerah. Daerah-daerah tertentu pada cairan akan berubah warnanya menjadi hitam ketika tegangan diterapkan antara bidang latar dan pola elektroda yang terdapat pad sisi dalam lempeng kaca bagian depan.
Keunggulan LCD adalah hanya menarik arus yang kecil (beberapa microampere), sehingga alat atau sistem menjadi portable karena dapat
menggunakan catu daya yang kecil.Keunggulan lainnya adalah tampilan yang diperlihatkan dapat dibaca dengan mudah di bawah terang sinar matahari.Di bawah sinar cahaya yang remang-remang dalam kondisi gelap, sebuah lampu
(berupa LED) harus dipasang dibelakang layar tampilan.
LCD yang digunakan adalah jenis LCD yang mena mpilkan data dengan 2
1. Dapat menampilkan karakter ASCII, sehingga dapat memudahkan untuk membuat program tampilan.
2. Mudah dihubungkan dengan port I/O karena hanya mengunakan 8 bit data dan 3 bit control.
3. Ukuran modul yang proporsional.
4. Daya yang digunakan relative sangat kecil.
LCD 16x2
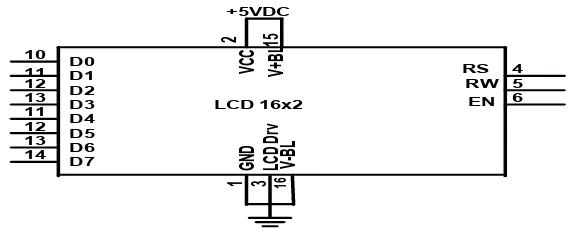
Gambar 2.4. Konfigurasi Pin LCD
Operasi dasar pada LCD terdiri dari empat, yaitu instruksi mengakses
proses internal, instruksi menulis data, instruksi membaca kondisi sibuk, dan instruksi membaca data. ROM pembangkit sebanyak 192 tipe karakter, tiap karakter dengan huruf 5x7 dot matrik.Kapasitas pembangkit RAM 8 tipe karakter
(membaca program), maksimum pembacaan 80x8 bit tampilan data.Perintah utama LCD adalah Display Clear, Cursor Home, Display ON/OFF, Display
Character Blink, Cursor Shift, dan Display Shift. Tabel 2.2. menunjukkan operasi dasar LCD
Tabel 2.1.Operasi Dasar LCD
RS R/W Operasi
0 1 Membaca Status Flag (DB7) dan alamat counter (DB0 ke DB6)
1 0 Menulis Data
1 1 Membaca Data
Tabel 2.2. Konfigurasi LCD
Pin Bilangan biner Keterangan
RS 0 Inisialisasi
1 Data
RW 0 Tulis LCD / W (write)
1 Baca LCD / R (read)
E 0 Pintu data terbuka
1 Pintu data tertutup
Tabel 2.3.Konfigurasi Pin LCD
Pin
No.
Keterangan Konfigurasi Hubung
1 GND Ground
2 VCC Tegangan +5VDC
3 VEE Ground
4 RS Kendali RS
6 E Kendali E/Enable
7 D0 Bit 0
8 D1 Bit 1
9 D2 Bit 2
10 D3 Bit 3
11 D4 Bit 4
12 D5 Bit 5
13 D6 Bit 6
14 D7 Bit 7
15 A Anoda (+5VDC)
16 K Katoda (Ground)
Lapisan film yang berisis Kristal cair diletakkan di antara dua lempeng kaca yang telah ditanami elektroda logam transparan. Saat teganga dicatukan pada beberapa pasang elektroda, molekul – molekul Kristal cair akan menyusun diri
agar cahaya yang mengenainya akan dipantulkan atau diserap. Dari hasil pemantulan atau penyerapan cahaya tersebut akan terbentuk pola huruf, angka,
atau gambar sesuai bagian yang di aktifka.
LCD membutuhkan tegangan dan daya yang kecil sehingga sangat popular untuk aplikasi pada kalkulator, arloji digital, dan instrument elektronika lain
seperti Global Positioning System (GPS), baragraph display dan multimeter digital. LCD umumnya dikemas dalam bentuk Dual In Line Package (DIP) dan
satu panel. Untuk membentuk pola, baik karakter maupun gambar pada kolom dan baris secara bersamaan digunakan metode Screening.
Metode screening adalah mengaktifkan daerah perpotongan suatu kolo dan suatu baris secara bergantian dan cepat sehingga seolah-olah aktif semua.Penggunaan metode ini dimaksudkan untuk menghemat jalur yang digunakan untuk
mengaktifkan panel LCD. Saat ini telah dikembangkan berbagai jenis LCD, mulai jenis LCD biasa, Passive Matrix LCD (PMLCD), hingga Thin-Film Transistor
BAB 3
PERANCANGAN DAN PEMBUATAN
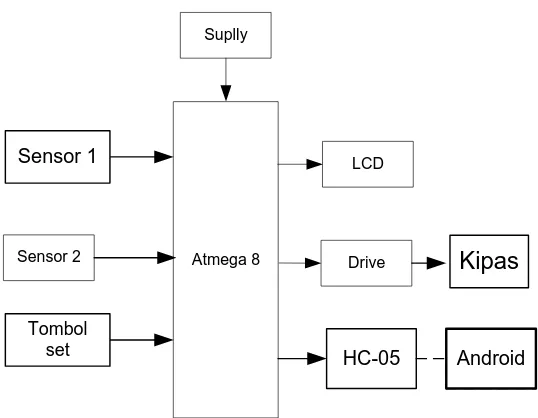
3.1.Diagram Blok Sistem
Atmega 8 Drive
Suplly
LCD
Sensor 2
Tombol set Sensor 1
Kipas
HC-05 AndroidAndroid
Gambar 3.1 Diagram blok system
3.1.1.Fungsi-fungsi diagram blok
1.Blok sensor 1 sebagai pendeteksi suhu atas
2. Blok sensor 2 sebagai input / pendeteksi suhu bawah
3. Blok Tombol set sebagai input / pengatur suhu sesuai yang diinginkan 4.Blok Supply sebagai sumber tegangan.
3.2.Rangkaian Regulator 7805
Gambar 3.2 Rangkaian Regulator 7805
Mikrokontroler, sensor dan komponen komponen elektonika, kebanyakan menggunakan tegangan 5v untuk menstabilkan tegangan dapat menggunakan
ICLM7805, yang berfungsi sebagai penstabil tegangan, dan mempertahankan output tetap 5 volt.
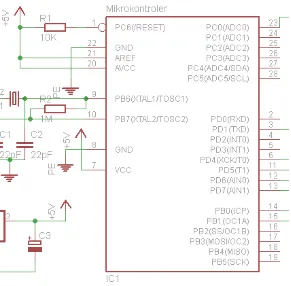
3.3.Rangkaian Mikrokontroler Atmega8
Rangkaian mikrokontroller merupakan pusat pengendalian dari bagian
input dan keluaran serta pengolahan data. Pada sistem ini digunakan mikrokontroller jenis Atmega8 yang memiliki spesifikasi sebagai berikut:
a.Kristal 8 MHz, yang berfungsi sebagai pembangkit clock.
b.Kapasitor 22 pF pada pin XTAL1 dan XTAL2. c.Resistor 10 kΩ dan kapasitor 10 nF pada pin reset. d.Port masukan dan keluaran yang digunakan yaitu :
1.PortC.0 digunakan sebagai Penerima data dari remote (receiver)
2.PortA.1,PortB.1 -PortB.4 digunakan sebagai data input basis transistor
Skema rangkaian sistem minimum mikrokontroller dapat dilihat pada gambar berikut :
Gambar 3.3 Rangkaian Mikrokontroler Atmega8
3.4.Rangkaian LCD
Pada alat ini, display yang digunakan adalah LCD (Liquid Crystal Display) 16 x 2. Untuk blok ini tidak ada komponen tambahan karena
mikrokontroler dapat memberi data langsung ke LCD, pada LCD Hitachi - M1632 sudah terdapat driver untuk mengubah data ASCII output mikrokontroler menjadi tampilan karakter. Pemasangan potensio sebesar 10 KΩ untuk mengatur kontras
Gambar 3.4. Rangkaian LCD
Dari gambar 3.4, rangkaian ini terhubung ke PB.1 - PB.7, yang merupakan pin I/O dua arah dan pin fungsi khusus, yaitu sebagai Timer/Counter, komperator
analog dan SPI mempunyai fungsi khusus sebagai pengiriman data secara serial. Sehingga nilai yang akan tampil pada LCD display akan dapat dikendalikan oleh
Mikrokontroller Atmega8.
3.5.Rangkaian Sensor LM35
Gambar 3.5.Rangkaian Sensor LM35
DZ sehingga range pengukuran hanya berkisar antara 0 – 100°C dengan perubahan sebesar 10mV/1°C. Dengan ketelitian yang dimiliki maka sensor
tersebut dapat diterapkan langsung dengan Mikrokontroller AVR ATmega8535 yang memiliki ADC internal 10 bit. Pada gambar diatas output dari LM35 dapat langsung di koneksikan ke ADC internal Mikrokontroller AVR ATmega8535.
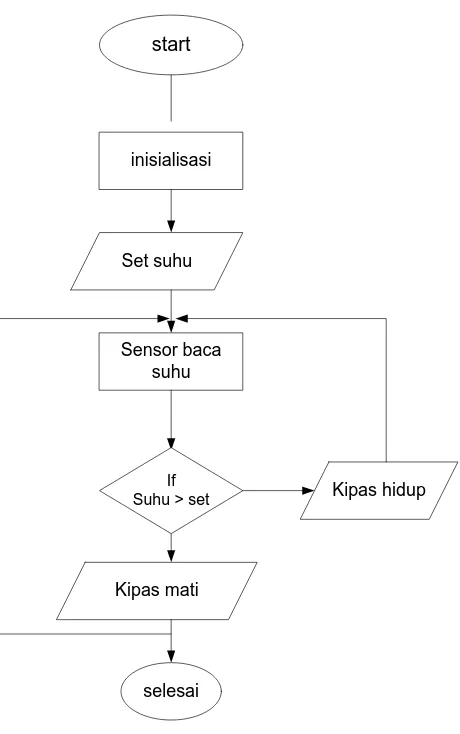
3.6.Flowchat Sistem
start
inisialisasi
Set suhu
Sensor baca suhu
Kipas mati
Kipas hidup
selesai If Suhu > set
BAB 4
PENGUJIAN DAN HASIL
4.1.Pengujian Rangkaian Regulator 7805
Voltage regulator IC adalah IC yang digunakan untuk mengatur tegangan
.IC 7805 adalah Regulator 5V, Voltage yang membatasi output tegangan 5V dan menarik 5V diatur power supply.Pengujian rangkaian regulator ini biasanya
menggunakan volt meter, rangkaian ic7805 ini akan mengeluarkan tegangan 5 volt dengan inputan diatas 6 volt sampai dengan 35 Volt.
4.2.Pengujian Rangkaian Mikrokontroler
Pemrograman menggunakan mode ISP (In System Programming)
mikrokontroler harus dapat diprogram langsung pada papan rangkaian dan rangkaian mikrokontroler harus dapat dikenali oleh program downloader. Pada pengujian ini berhasil dilakukan dengan dikenalinya jenis mikrokontroler
oleh program downloader yaitu Atmega8.
Atmega8 menggunakan kristal dengan frekuensi 8 MHz, apabila Chip Signature sudah dikenali dengan baik dan dalam waktu singkat, bisa dikatakan
rangkaian mikrokontroler bekerja dengan baik dengan mode ISP-nya.
4.3.Pengujian Rangkain LCD
Bagian ini hanya terdiri dari sebuah LCD dot matriks 2 x 16 karakter yang berfungsi sebagai tampilan hasil pengukuran dan tampilan dari beberapa
keterangan. LCD dihubungkan langsung ke Port B dari mikrokontroler yang berfungsi mengirimkan data hasil pengolahan untuk ditampilkan dalam bentuk alfabet dan numerik pada LCD.Display karakter pada LCD diatur oleh pin EN,
RS dan RW: Jalur EN dinamakan Enable. Jalur ini digunakan untuk memberitahu LCD bahwa anda sedang mengirimkan sebuah data. Untuk mengirimkan data ke
LCD, maka melalui program EN harus dibuat logika low “0” dan set ( high ) pada dua jalur kontrol yang lain RS dan RW. Jalur RW adalah jalur kontrol Read/ Write. Ketika RW berlogika low (0), maka informasi pada bus data akan
dituliskan pada layar LCD. Ketika RW berlogika high ”1”, maka program akan melakukan pembacaan memori dari LCD. Sedangkan pada aplikasi umum pin
RW selalu diberi logika low ( 0 )
Berdasarkan keterangan di atas maka kita sudah dapat membuat progam untuk menampilkan karaker pada display LCD. Adapun program yang diisikan ke
#include <LiquidCrystal.h>
LiquidCrystal lcd(8, 7, 6, 4, 3, 2);
Void setup()
{lcd.begin(16, 2);}
Void loop()
{
Lcd.setCursor(0,0);
Lcd.putsf(“tes lcd”);
}
Program di atas akan menampilkan kata “Tes LCD” di baris pertama pada
display LCD 2x16. Pada alat dalam penelitian ini, Saat keseluruhan rangkaian diaktifkan.
4.4. Pengujian Rangkaian Sensor LM35
Sensor ini bekerja dengan sangat baik, sesuai dengan datasheet yang
dikeluarkan pihak pabrikan. Sensor ini sudah menjadi sensor standar internasional karena telah dipakai pada kejuaraan- kejuaraan robot pemadam api tingkat dunia. Tegangan keluarannya linier dengan perubahan sebesar 10mV untuk setiap
kenaikan atau penurunan sebesar 1C.
Melalui pengujian pada suhu ruangan maupun air yang didinginkankan
dengan suhu yang terbaca dari termometer sangatlah akurat. Berikut adalah programnya
#include <mega8.h> #include <delay.h>
#include <mega8.h> #include <stdlib.h>
#define pb1 PINB.2 #define pb2 PINB.4 char data;
int set=30; int get1,get2;
float temp; char buff[20]; int pwm;
int count;
// Alphanumeric LCD functions
#include <alcd.h>
// Declare your global variables here // Standard Input/Output functions
#include <stdio.h>
// Voltage Reference: AREF pin
unsigned int read_adc(unsigned char adc_input) {
ADMUX=adc_input | ADC_VREF_TYPE;
// Delay needed for the stabilization of the ADC input voltage delay_us(10);
// Start the AD conversion ADCSRA|=(1<<ADSC);
// Wait for the AD conversion to complete while ((ADCSRA & (1<<ADIF))==0); ADCSRA|=(1<<ADIF);
return ADCW; }
void main(void) {
// Declare your local variables here
// Input/Output Ports initialization // Port B initialization
// Function: Bit7=In Bit6=In Bit5=In Bit4=In Bit3=In Bit2=In Bit1=Out Bit0=In DDRB=(0<<DDB7) | (0<<DDB6) | (0<<DDB5) | (0<<DDB4) | (0<<DDB3) | (0<<DDB2) | (1<<DDB1) | (0<<DDB0);
// State: Bit7=T Bit6=T Bit5=T Bit4=P Bit3=T Bit2=P Bit1=0 Bit0=T PORTB=(0<<PORTB7) | (0<<PORTB6) | (0<<PORTB5) | (1<<PORTB4) |
// Function: Bit6=In Bit5=In Bit4=In Bit3=In Bit2=In Bit1=In Bit0=In DDRC=(0<<DDC6) | (0<<DDC5) | (0<<DDC4) | (0<<DDC3) | (0<<DDC2) |
(0<<DDC1) | (0<<DDC0);
// State: Bit6=T Bit5=T Bit4=T Bit3=T Bit2=T Bit1=T Bit0=T
PORTC=(0<<PORTC6) | (0<<PORTC5) | (0<<PORTC4) | (0<<PORTC3) |
(0<<PORTC2) | (0<<PORTC1) | (0<<PORTC0); // Port D initialization
// Function: Bit7=In Bit6=In Bit5=In Bit4=In Bit3=In Bit2=In Bit1=In Bit0=In DDRD=(0<<DDD7) | (0<<DDD6) | (0<<DDD5) | (0<<DDD4) | (0<<DDD3) | (0<<DDD2) | (0<<DDD1) | (0<<DDD0);
// State: Bit7=T Bit6=T Bit5=T Bit4=T Bit3=T Bit2=T Bit1=T Bit0=T PORTD=(0<<PORTD7) | (0<<PORTD6) | (0<<PORTD5) | (0<<PORTD4) |
(0<<PORTD3) | (0<<PORTD2) | (0<<PORTD1) | (0<<PORTD0); // Timer/Counter 0 initialization
// Clock source: System Clock
// Clock value: Timer 0 Stopped
TCCR0=(0<<CS02) | (0<<CS01) | (0<<CS00);
TCNT0=0x00;
// Timer/Counter 1 initialization // Clock source: System Clock
// Clock value: 8000,000 kHz // Mode: Fast PWM top=0x00FF
// Noise Canceler: Off
// Input Capture on Falling Edge
// Timer Period: 0,032 ms // Output Pulse(s):
// OC1A Period: 0,032 ms Width: 0 us
// Timer1 Overflow Interrupt: Off // Input Capture Interrupt: Off
// Compare A Match Interrupt: Off // Compare B Match Interrupt: Off
TCCR1A=(1<<COM1A1) | (0<<COM1A0) | (0<<COM1B1) | (0<<COM1B0) |
(0<<WGM11) | (1<<WGM10);
TCCR1B=(0<<ICNC1) | (0<<ICES1) | (0<<WGM13) | (1<<WGM12) |
(0<<CS12) | (0<<CS11) | (1<<CS10); TCNT1H=0x00;
// Timer/Counter 2 initialization
// Mode: Normal top=0xFF // OC2 output: Disconnected
ASSR=0<<AS2;
TCCR2=(0<<PWM2) | (0<<COM21) | (0<<COM20) | (0<<CTC2) | (0<<CS22) | (0<<CS21) | (0<<CS20);
TCNT2=0x00; OCR2=0x00;
// Timer(s)/Counter(s) Interrupt(s) initialization
TIMSK=(0<<OCIE2) | (0<<TOIE2) | (0<<TICIE1) | (0<<OCIE1A) | (0<<OCIE1B) | (0<<TOIE1) | (0<<TOIE0);
// External Interrupt(s) initialization // INT0: Off
// INT1: Off
MCUCR=(0<<ISC11) | (0<<ISC10) | (0<<ISC01) | (0<<ISC00); // USART initialization
// Communication Parameters: 8 Data, 1 Stop, No Parity // USART Receiver: On
// USART Transmitter: On // USART Mode: Asynchronous // USART Baud Rate: 9600
UCSRA=(0<<RXC) | (0<<TXC) | (0<<UDRE) | (0<<FE) | (0<<DOR) | (0<<UPE) | (0<<U2X) | (0<<MPCM);
UCSRC=(1<<URSEL) | (0<<UMSEL) | (0<<UPM1) | (0<<UPM0) | (0<<USBS) | (1<<UCSZ1) | (1<<UCSZ0) | (0<<UCPOL);
UBRRH=0x00; UBRRL=0x33;
// Analog Comparator initialization
// Analog Comparator: Off
// The Analog Comparator's positive input is
// connected to the AIN0 pin
// The Analog Comparator's negative input is // connected to the AIN1 pin
ACSR=(1<<ACD) | (0<<ACBG) | (0<<ACO) | (0<<ACI) | (0<<ACIE) | (0<<ACIC) | (0<<ACIS1) | (0<<ACIS0);
// ADC initialization
// ADC Clock frequency: 1000,000 kHz // ADC Voltage Reference: AREF pin
ADMUX=ADC_VREF_TYPE;
ADCSRA=(1<<ADEN) | (0<<ADSC) | (0<<ADFR) | (0<<ADIF) | (0<<ADIE) |
(0<<ADPS2) | (1<<ADPS1) | (1<<ADPS0); SFIOR=(0<<ACME);
// SPI initialization
// SPI disabled
SPCR=(0<<SPIE) | (0<<SPE) | (0<<DORD) | (0<<MSTR) | (0<<CPOL) |
// TWI disabled
TWCR=(0<<TWEA) | (0<<TWSTA) | (0<<TWSTO) | (0<<TWEN) |
(0<<TWIE);
// Alphanumeric LCD initialization // Connections are specified in the
itoa(set,buff); lcd_puts(buff);
lcd_gotoxy(9,1); lcd_putsf("PWM="); itoa(pwm,buff);
lcd_puts(buff);
if (temp>set){OCR1A=pwm;}
if (temp<=set){OCR1A=0;} delay_ms(200);
}
}
4.5Hasil Pengujian Percobaan pada Sensor LM35 4.1. Tabel Hasil Pengujian Keseluruhan
Waktu (s) Suhu (0C)
0 30
10 30
20 30
30 29
40 29
50 29
60 29
70 29
90 28
100 28
110 28
120 28
130 28
140 28
150 28
160 28
170 27
180 27
190 27
200 27
210 27
220 27
230 27
240 27
250 27
260 27
270 27
280 27
290 27
300 27
320 26
330 26
340 26
350 26
360 26
370 26
380 26
390 26
400 26
410 25
420 25
430 25
440 25
450 25
460 25
470 25
480 25
490 25
500 25
510 25
520 24
530 24
550 24
560 24
570 24
580 24
590 24
BAB V PENUTUP
5.1.Kesimpulan
Setelah melakukan tahap perancangan dan pembuatan sistem yang
kemudian dilanjutkan dengan tahap pengujian dan analisa maka dapat diambil kesimpulan sebagai berikut :
1. Prinsip Kerja pada Sensor LM35 adalah mengubah besaran suhu menjadi besaran tegangan.
2. Dalam aplikasi alat kontrol suhu ruangan ini dapat disimpukan bahwa ketika
sensor mendeteksi perubahan suhu pada ruangan ,Maka Mikrokontroler akan menampilkan data ke LCD, Jika suhu mencapai 24 0C maka kecepatan
kipas akan menurun secara otomatis dan sebaliknya apabila suhu melebihi 240C maka kecepatan kipas akan meningkat secara otomatis yang dikontrol menggunakan android.
5.2.Saran
Dari hasil Tugas Akhir ini masih terdapat beberapa kekurangan dan
dimungkinkan untuk pengembangan lebih lanjut.Oleh karenanya penulis merasa perlu untuk memberi saran sebagai berikut:
1. Pada Tugas Akhir ini dengan menggunakan Alat kontrol suhu ruangan,
Agar lebih teliti lagi dalam mengambil data agar data yang di dapat lebih akurat.