Direktorat Riset dan Pengabdian Masyarakat Direktorat Jenderal Riset dan Pengembangan Kementerian Riset, Teknologi, dan Pendidikan Tinggi
Gedung BPPT II Lantai 19, Jl. MH. Thamrin No. 8 Jakarta Pusat http://simlitabmas.ristekdikti.go.id/
PROTEKSI ISI PROPOSAL
Dilarang menyalin, menyimpan, memperbanyak sebagian atau seluruh isi proposal ini dalam bentuk apapun kecuali oleh pengusul dan pengelola administrasi penelitian
PROPOSAL PENELITIAN 2018
ID Proposal: f484e013-abcd-4bda-9edd-758f7f8277ee Rencana Pelaksanaan Penelitian: tahun 2019 s.d. tahun 2021
1. JUDUL PENELITIAN
Transformasi Mobile Robot Menggunakan Multi Sensor
Bidang Fokus RIRN / Bidang
Unggulan Perguruan Tinggi Tema Topik (jika ada)
Rumpun Bidang Ilmu
RIP-06 Industri, transportasi,
dan teknologi informasi
-06.09 Studi dan pemetaan teknologi
sensor dan Big Data menuju Internet of Things. Teknik Kendali (Atau Instrumentasi dan Kontrol) Kategori (Kompetitif Nasional/ Desentralisasi/ Penugasan) Skema Penelitian Strata (Dasar/ Terapan/ Pengembangan) SBK (Dasar, Terapan, Pengembangan) Target Akhir TKT Lama Penelitian (Tahun) Penelitian Desentralisasi Penelitian Dasar Unggulan Perguruan Tinggi
SBK Riset Dasar SBK Riset Dasar 2 3
2. IDENTITAS PENGUSUL
Nama, Peran Perguruan
Tinggi/ Institusi
Program Studi/
Bagian Bidang Tugas ID Sinta H-Index
NURYANTO Ketua Pengusul Universitas Muhammadiyah Magelang Teknik Informatika 5974640 0 OESMAN RALIBY AL MANAN S.T, M.Eng Anggota Pengusul 2 Universitas Muhammadiyah Magelang Teknik Industri 4509 0 ROCHIM WIDARYANTO S.T, M.T Anggota Pengusul 3 Universitas Muhammadiyah Magelang Teknik Informatika 6643531 0
WIDIYANTO S.Kom, M.Kom Anggota Pengusul 1 Muhammadiyah Magelang Informatika
3. MITRA KERJASAMA PENELITIAN (JIKA ADA)
Pelaksanaan penelitian dapat melibatkan mitra kerjasama, yaitu mitra kerjasama dalam melaksanakan penelitian, mitra sebagai calon pengguna hasil penelitian, atau mitra investor
Mitra Nama Mitra
4. LUARAN DAN TARGET CAPAIAN Luaran Wajib
Tahun
Luaran Jenis Luaran
Status target capaian (
accepted, published, terdaftar atau granted, atau status
lainnya)
Keterangan (url dan nama
jurnal, penerbit, url paten, keterangan sejenis lainnya)
2 Publikasi Ilmiah Jurnal
Internasional accepted/published
Journal of Automation, Mobile Robotics & Intelligent Systems
3 Publikasi Ilmiah Jurnal
Internasional accepted/published Jurnal Teknologi
Luaran Tambahan
Tahun
Luaran Jenis Luaran
Status target capaian (accepted,
published, terdaftar atau granted, atau status lainnya)
Keterangan (url dan nama jurnal,
penerbit, url paten, keterangan sejenis lainnya)
2
Prosiding dalam pertemuan ilmiah Internasional
sudah terbit/sudah dilaksanakan eecsi 2019
3 Paten Sederhana terdaftar
-5. ANGGARAN
Rencana anggaran biaya penelitian mengacu pada PMK yang berlaku dengan besaran minimum dan maksimum sebagaimana diatur pada buku Panduan Penelitian dan Pengabdian kepada Masyarakat Edisi 12.
Total RAB 3 Tahun Rp. 134,360,000 Tahun 1 Total Rp. 0
Tahun 2 Total Rp. 76,780,000
Jenis Pembelanjaan Item Satuan Vol. Biaya
Satuan Total
HONOR Pengolah data penelitian artikel 2.00 1,540,000 3,080,000
HONOR
Upah bulanan teknisi laboratorium (25.000 OJ x 8 jam/minggu x 10 bulan x 2 orang)
orang 1.00 8,000,000 8,000,000
HONOR Upah bulanan tenaga administrasi
(300.000 OB x 10 bulan) orang 1.00 3,000,000 3,000,000
BELANJA BARANG NON OPERASIONAL LAINNYA
Biaya engish editing service
Jenis Pembelanjaan Item Satuan Vol. Biaya
Satuan Total
BELANJA BARANG NON OPERASIONAL LAINNYA
Biaya pengujian gerak kaki dan
roda kali 3.00 2,000,000 6,000,000
BELANJA BARANG NON OPERASIONAL LAINNYA
Biaya penyususnan artikel lembar 20.00 200,000 4,000,000
BELANJA BARANG NON OPERASIONAL LAINNYA
Biaya seminar hasil dan publikasi artikel 1.00 5,000,000 5,000,000
BELANJA BARANG NON OPERASIONAL LAINNYA
Biaya uji Transformasi kali 1.00 2,000,000 2,000,000
BELANJA BARANG NON OPERASIONAL LAINNYA
manufaktur bodi mobil robot paket 1.00 2,000,000 2,000,000
BELANJA BARANG NON OPERASIONAL LAINNYA
pemasangan sencor dan kamera
pada mobil robot kali 1.00 2,000,000 2,000,000
BELANJA BARANG NON OPERASIONAL LAINNYA
Pembuatan Program Mobil Robot paket 1.00 2,500,000 2,500,000
BELANJA BARANG NON OPERASIONAL LAINNYA
Sinkronisasi Sub Komponen
Mobil Robot paket 1.00 2,500,000 2,500,000
BELANJA BAHAN Article Processing Charge pcs 1.00 5,000,000 5,000,000
BELANJA BAHAN ATK, fotocopy, dan materai untuk
pelaporan paket 10.00 150,000 1,500,000
BELANJA BAHAN camera USB logitech HD buah 1.00 1,200,000 1,200,000
BELANJA BAHAN
GP2Y0A21YK0F Sharp IR Analog Distance Sensor 10-80cm + Cable, Arduino Compatible
buah 1.00 100,000 100,000
BELANJA BAHAN Konsumsi Rapat paket 40.00 50,000 2,000,000
BELANJA BAHAN
Motor Controller, 4 Channel, 4.5A, 4.5-12V - For Rover 5 Chassis (Supports Encoder Mixing)
buah 1.00 300,000 300,000
BELANJA BAHAN Motor Driver 2A Dual L298
H-Bridge buah 1.00 500,000 500,000
BELANJA BAHAN
MS5540-CM MS5540C MS5540CM MS5540 Pressure Sensor, Waterproof And Accurate Height Module
buah 1.00 300,000 300,000
BELANJA BAHAN Prusa i4 withx-real unit 1.00 10,000,000 10,000,000
BELANJA BAHAN Raspberry Pi 3 model B buah 1.00 1,200,000 1,200,000
BELANJA BAHAN Rover 5 Robot Platform buah 1.00 800,000 800,000
BELANJA BAHAN Servo Control untuk Robot
Hexapod - Delta Hex Engine buah 1.00 900,000 900,000
Jenis Pembelanjaan Item Satuan Vol. Biaya Satuan Total PERJALANAN LAINNYA material (semarang) BELANJA PERJALANAN LAINNYA
Pengganti biaya perjalanan ke Semarang (pengujian di Lab Teknik Mesin Undip)
orang 2.00 400,000 800,000
BELANJA PERJALANAN LAINNYA
Perjalanan seminar orang 4.00 1,200,000 4,800,000
Tahun 3 Total Rp. 57,580,000
Jenis Pembelanjaan Item Satuan Vol. Biaya
Satuan Total
HONOR Pengolah data penelitian artikel 2.00 1,540,000 3,080,000
HONOR
Upah bulanan teknisi laboratorium (25.000 OJ x 8 jam/minggu x 10 bulan x 2 orang)
orang 1.00 8,000,000 8,000,000
HONOR
Upah bulanan tenaga
administrasi (300.000 OB x 10 bulan) orang 1.00 3,000,000 3,000,000 BELANJA BARANG NON OPERASIONAL LAINNYA
Biaya engish editing service
(webshop elsevier) artikel 1.00 6,500,000 6,500,000
BELANJA BARANG NON OPERASIONAL LAINNYA
Biaya penyususnan artikel lembar 20.00 200,000 4,000,000
BELANJA BARANG NON OPERASIONAL LAINNYA
Biaya seminar hasil dan
publikasi artikel 1.00 5,000,000 5,000,000
BELANJA BARANG NON OPERASIONAL LAINNYA
Biaya uji Transformasi kali 1.00 1,000,000 1,000,000
BELANJA BARANG NON OPERASIONAL LAINNYA
pemasangan sencor dan
kamera pada mobil robot kali 1.00 2,000,000 2,000,000
BELANJA BARANG NON OPERASIONAL LAINNYA
pendaftaran paten paket 1.00 10,000,000 10,000,000
BELANJA BARANG NON OPERASIONAL LAINNYA
Penyusunan draft paten kali 1.00 2,500,000 2,500,000
BELANJA BAHAN Article Processing Charge pcs 1.00 5,000,000 5,000,000
BELANJA BAHAN ATK, fotocopy, dan materai
untuk pelaporan paket 10.00 150,000 1,500,000
BELANJA BAHAN camera USB logitech HD buah 1.00 1,200,000 1,200,000
BELANJA BAHAN Konsumsi Rapat paket 40.00 50,000 2,000,000
Jenis Pembelanjaan Item Satuan Vol. Biaya
Satuan Total
BELANJA PERJALANAN LAINNYA
Biaya perjalanan pengadaan
material (semarang) kali 2.00 400,000 800,000
BELANJA PERJALANAN LAINNYA
Pengganti biaya perjalanan ke Semarang (pengujian di Lab Teknik Mesin Undip)
RINGKASAN
Proses eksplorasi daerah yang tidak memungkinkan dilakukan oleh manusia membutuhkan alat khusus seperti mobile robot. Untuk bergerak mobile robot menggunakan roda (wheel robot) atau kaki (legged robot) dengan keunggulan masing-masing. Penelitian selama ini fokus pada perubahan bentuk dari roda-kaki (hybrid robot), sehingga yang tidak sebaik model sesungguhnya. Pada penelitian ini mobile robot memiliki kaki dan roda yang berfungsi salah satunya saja. Berdasarkan pada Rencana Induk Penelitian (RIP) yang ditetapkan Univeristas Muhammadiyah Magelang dan rekam jejak tim peneliti, maka usulan penelitian ini fokus pada
mobile robot dan sensor yang mengacu pada RIP-06 Bidang Industri, Transportasi dan Teknologi Informasi.
Penelitian ini direncanakan tiga tahun dengan metode prototype. Tiap tahun menghasilkan prototipe mobile robot dengan titik berat yang berbeda yaitu tahun pertama fokus pada bentuk mekanis (TKT I), tahun kedua lebih ke kontrol transformasinya (TKT 2) dan tahun ketiga adalah prototipe mobile robot berkaki dan beroda yang dapat bertransformasi otomatis sesuai dengan medan yang akan dilalui (TKT 3). Publikasi pada Jurnal Internasional dengan target meningkat tiap tahunnya.
Mobile Robot, Wheel,Legged, Hybrid robot, transformasi
LATAR BELAKANG
Untuk proses eksplorasi untuk meneliti suatu daerah yang bersifat khusus dan tidak memungkinkan dilakukan oleh manusia membutuhkan alat tertentu. Daerah dengan kondisi ektrim misalnya kawah gunung, lorong sempit, luar angkasa memerlukan sebuah robot yang dilengkapi berbagai sensor untuk merekam, menyimpan, dan mengirimkan data.
Mobile robot adalah sebuah robot yang dapat berpindah tempat. Jenis mobile robot berdasarkan cara bergeraknya dibedakan menjadi 2 yaitu robot beroda (wheel robot) dan robot berkaki (legged robot) [1]. Robot beroda digunakan untuk melewati jalan yang datar sedangkan robot berkaki untuk area yang bergelombang tidak menentu.
Pada permukaan datar robot beroda, desainnya lebih mudah, murah dan hemat energi dibanding robot kaki karena memiliki bagian yang jauh lebih sedikit. Robot berkaki Ringkasan penelitian tidak lebih dari 500 kata yang berisi latarbelakang penelitian, tujuan dan tahapan metode penelitian, luaran yang ditargetkan, serta uraian TKT penelitian yang diusulkan.
Kata kunci maksimal 5 kata
Latar belakang penelitian tidak lebih dari 500 kata yang berisi latar belakang dan permasalahan yang akan diteliti, tujuan khusus, dan urgensi penelitian. Pada bagian ini perlu dijelaskan uraian tentang spesifikasi khusus terkait dengan skema.
memungkinkan dapat melewati medan terlalu lunak, licin, bahkan berbatuan yang tidak dapat dilewati robot beroda [2]
Penelitian transformasi mobile robot berkaki-beroda selama ini focus pada perubahan bentuk dari kaki menjadi sebuah roda dan sebaliknya. Salah satu kelebihan robot beroda dibanding dengan robot berkaki adalah dari sisi kestabilan dan kecepatan. Pada saat kaki berubah menjadi roda atau roda menjadi kaki karena memang didesain supaya dapat mengakomodir keduanya sehingga akan mengorbankan salah satu fitur yang menjadi keunggulan model masing-masing, misalnya saja dari sisi kecepatan pada saat menjadi roda tidak akan sebaik seperti roda sesungguhnya.
Pada penelitian ini transformasi yang dilakukan bukan pada model kaki/roda akan tetapi sebuah mobile robot yang memiliki kaki dan roda sebenarnya yang dapat berubah model menjadi robot berkaki atau robot beroda sesuai dengan medan yang akan dilalui. Sensor yang dipasang akan mendeteksi jenis area yang kan dilalui, microcontroller akan menentukan menjadi robot berkaki atau robot beroda.
Metode penelitian yang dilakukan dengan model prototype yaitu rancang bangun mobile robot berdasarkan kajian kemudian dilakukan pengujian rancang bangun dan pengujian lagi sampai didapatkan model sesuai dengan yang diharapkan. Penelitian ini diharapkan menghasilkan prototype mobil robot berkaki dan beroda yang dapat bertransformasi otomatis sesuai dengan medan yang akan dilalui.
1.1. Capaian riset tahun pertama (2018)
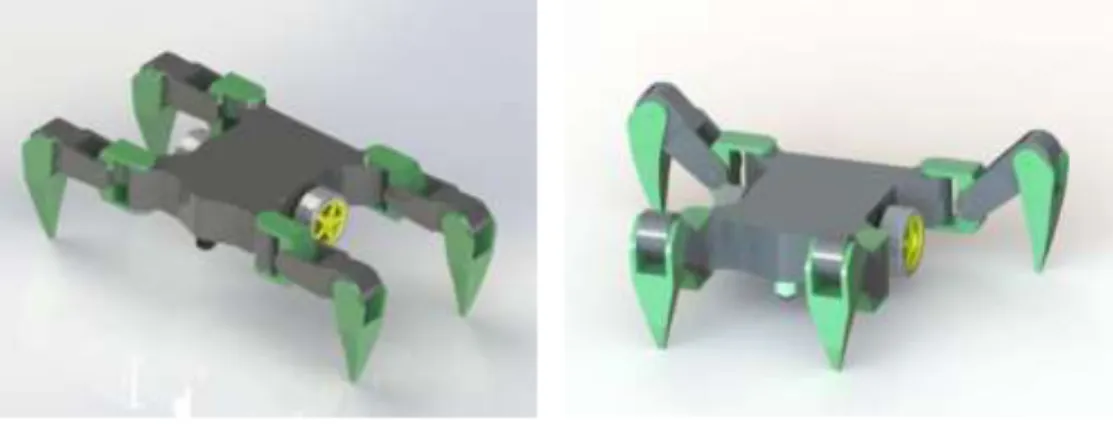
Pada penelitian tahun pertama, telah menghasilkan sebuah model transformasi robot kaki ke robot beroda (KAROT) bersama dengan perhitungan matematisnya. Rancangan model dan hasil simulasi KAROT telah dipresentasikan pada International Conference on Information System Computer Science and Engineering (ICONISCSE) 2018 dan akan dipublikasikan pada Journal of Physics : Conference Series(JPCS). Model robot dibuat menggunakan Solidworks, lalu diexport ke SimMechanic pada Simulink untuk disimulasikan dengan menggunakan MATLAB seperti pada Gambar 1.1.
(a) (b)
Gambar 1.1 Model KAROT 3D (a) mode kaki (b) mode roda
1.2. Masalah dan alternatif solusi
Hasil penelitin ini dapat berkontribusi terhadap pencapaian Agenda Riset Nasional tema 3: Riset Pengembangan teknologi untuk peningkatan konten TIK (DRN, 2016) dan Rencana Induk Penelitian Universitas Muhammadiyah Magelang bidang Industri, transportasi, dan teknologi informasi [RIP-06] pada topik 06.09 Studi dan pemetaan teknologi sensor dan Big Data menuju Internet of Things [4].
1.3. Tujuan khusus dan urgensi penelitian tahun kedua
Tujuan khusus penelitian Urgensi (keutamaan) penelitian
menghasilkan sebuah prototype model mobile robotberkaki-beroda yangdapat berubah secara otomatis menyesuaikan medan yang akan dilalui.
Hasil penelitian ini dapat diimplementasikan menjadi mobile robot yang dipasangi berbagai macam sensor untuk mengeksplorasi suatu tempat dan mengirimkan datanya ke server untuk mendukung bidang riset lainnya.
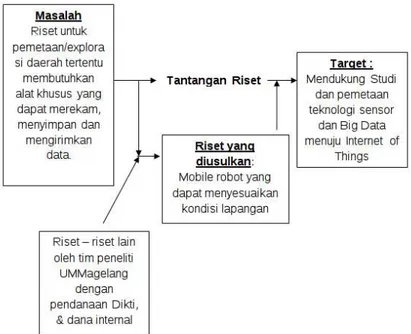
1.4. Kontribusi penelitian terhadap pencapaian Rencana Induk Penelitian (RIP)
Gambar 1.2 Kontribusi Riset yang diusulkan terhadap pencapaian RIP-UMMagelang
TINJAUAN PUSTAKA
2.1. State of The Art Riset Mobil Robot
Pada permukaan datar robot beroda, desainnya lebih mudah, murah dan hemat energi dibanding robot kaki karena memiliki bagian yang jauh lebih sedikit. Robot berkaki memungkinkan dapat melewati medan terlalu lunak, licin, bahkan berbatuan yang tidak dapat dilewati robot beroda [2]
Berdasarkan kelemahan dan kelebihan masing-masing robot berkaki dan beroda maka muncul berbagai penelitian yang menggabungkan keduanya. Hylos (gambar 2.1) merupakan robot yang memiliki 4 wheel-legs, yang masing-masing dihubungkan dengan 2 suspensi Degree of Freedom (DOF) untuk melewati medan yang tidak rata [5].
Tinjauan pustaka tidak lebih dari 1000 kata dengan mengemukakan state of the art dan peta jalan (road map) dalam bidang yang diteliti. Bagan dan road map dibuat dalam bentuk JPG/PNG yang kemudian disisipkan dalam isian ini. Sumber pustaka/referensi primer yang relevan dan dengan mengutamakan hasil penelitian pada jurnal ilmiah dan/atau paten yang terkini. Disarankan penggunaan sumber pustaka 10 tahun terakhir.
Gambar 2.1. Gambar prototype Hylos
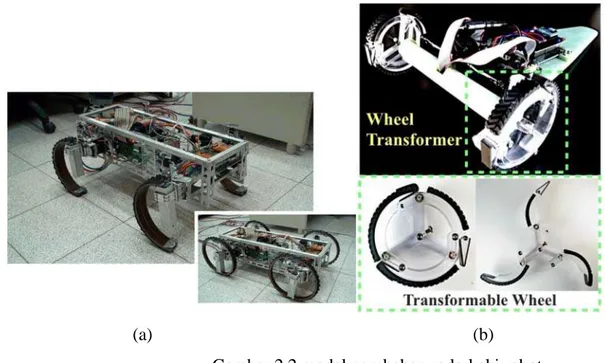
Penelitian selanjutnya berusaha mengubah roda yang dapat berubah menjadi kaki seperti Quattroped memiliki 4 buah roda lingkaran penuh yang dapat berubah menjadi 4 buah separuh lingkaran sebagai kaki robot (gambar 2.2a) [6] dan transformable wheel (gambar 2.2b) [7]. Pada tahun 2006 telah di patentkan model perubahan bentuk roda-kaki robot ‘Reconfigurable Articulated Leg And Wheel’ di Amerika Serikat oleh Jacobsen dkk. [8].
(a) (b)
Gambar 2.2 model perubahan roda-kaki robot
2.2. Rekam Jejak (Footprint) Penelitian
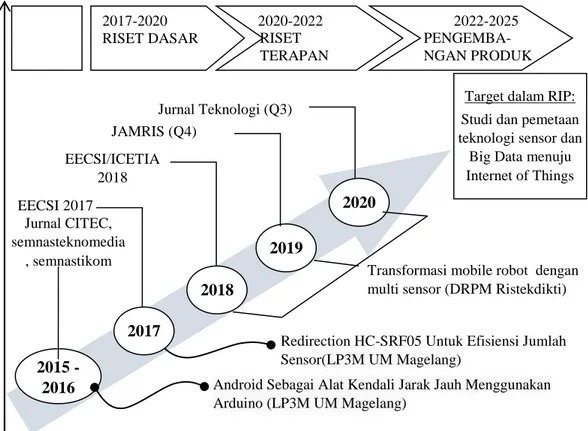
Rekam jejak penelitian dan rencana penelitian Fakultas Teknik Universitas Muhammadiyah Magelang telah melakukan penelitian dan pengembangan dengan yang dilakukan oleh tim peneliti yang berhubungan dengan topik riset yang diusulkan seperti gambar 2.3.
Gambar 2.3. Rekam jejak penelitian
2.3. Peta Rencana Pencapaian RIP
Clean and green production mampu mengurangi emisi karbon dari sektor industri. Ketersediaan infrastruktur transportasi merupakan salah satu aspek dalam meningkatkan daya saing bangsa. TIK menawarkan potensi yang luar biasa dalam semua aspek. TIK mampu mendukung cara-cara baru dalam melakukan sesuatu dengan lebih produktif, efektif, efisien, aman, dan akurat.
Berdasarkan rumusan pemecahan masalah yang telah dirumuskan, topik-topik penelitian juga telah dirumuskan sebagai berikut:
Target dalam RIP: Studi dan pemetaan teknologi sensor dan
Big Data menuju Internet of Things 2017-2020 RISET DASAR 2020-2022 RISET TERAPAN 2022-2025 PENGEMBA-NGAN PRODUK Jurnal CITEC, semnasteknomedia , semnastikom 2019 2020 EECSI 2017 JAMRIS (Q4) Jurnal Teknologi (Q3) EECSI/ICETIA 2018 2015 -
2016 Android Sebagai Alat Kendali Jarak Jauh Menggunakan Arduino (LP3M UM Magelang)
2017
2018
Redirection HC-SRF05 Untuk Efisiensi Jumlah Sensor(LP3M UM Magelang)
Transformasi mobile robot dengan multi sensor (DRPM Ristekdikti)
Gambar 2.4. Rencana sinergi antar kelompok peneliti dalam mencapai bidang unggulan Riset Universitas Muhammadiyah Magelang
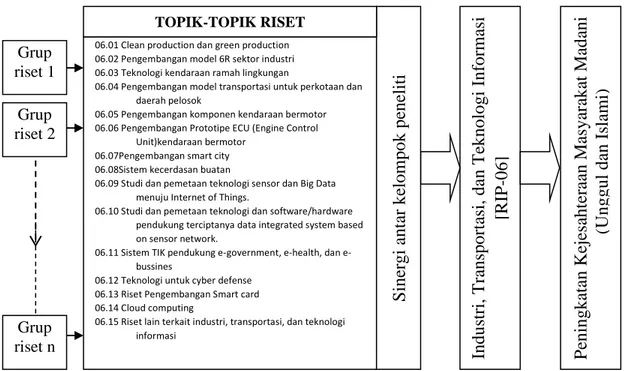
Berdasar pada RIP yang ditetapkan Univeristas dan rekam jejak tim peneliti, maka usulan penelitian ini fokus pada mobile robot dan sensor yang mengacu pada RIP-06 Bidang Industri, transportasi dan Teknologi Informasi. Hasil riset iniakan mendukung kegiatan topik riset lain seperti : Sistem kecerdasan buatan [06.08], Studi dan pemetaan teknologi sensor dan Big Data menuju Internet of Things [06.09], Studi dan pemetaan teknologi dan software/hardware pendukung terciptanya data integrated system based on sensor network [06.10].
Target dari tujuan penelitian ini adalah untuk mendukung Studi dan pemetaan teknologi sensor dan Big Data menuju Internet of Things. Pada sebuah riset untuk pemetaan/explorasi daerah tertentu membutuhkan alat khusus misalnya rungan sempit, kondisi extreme dibutuhkan sebuah alat yang dapat merekam, menyimpan dan mengirimkan data misalnya robot. Riset-riset yang telah dilakukan oleh tim peneliti yang telah didanai oleh Dikti dan Internal Universitas sudah mengarah pada teknologi sensor dan mobile robot.
06.01 Clean production dan green production 06.02 Pengembangan model 6R sektor industri 06.03 Teknologi kendaraan ramah lingkungan
06.04 Pengembangan model transportasi untuk perkotaan dan daerah pelosok
06.05 Pengembangan komponen kendaraan bermotor 06.06 Pengembangan Prototipe ECU (Engine Control
Unit)kendaraan bermotor 06.07Pengembangan smart city 06.08Sistem kecerdasan buatan
06.09 Studi dan pemetaan teknologi sensor dan Big Data menuju Internet of Things.
06.10 Studi dan pemetaan teknologi dan software/hardware pendukung terciptanya data integrated system based on sensor network.
06.11 Sistem TIK pendukung government, health, dan e-bussines
06.12 Teknologi untuk cyber defense 06.13 Riset Pengembangan Smart card 06.14 Cloud computing
06.15 Riset lain terkait industri, transportasi, dan teknologi informasi Industr i, Tra nsporta si, da n Te knologi Inf orma si [RIP -06] P enin gka tan K ejesa ht era an Ma sya ra ka t Mad ani (U nggul dan I slami) S iner gi anta r ke lom pok p ene li ti Grup riset 1 Grup riset 2 Grup riset n TOPIK-TOPIK RISET
METODE
3.1.Lingkup, target, dan target luaran penelitian
Pelaksanaan penelitian direncanakan tiga tahun dengan menggunakan metode protoype yang didasarkan pada studi literatur. Konsep prototype merupakan siklus dari 3 proses yaitu : proses pengumpulan kebutuhan/ perancangan, proses pembuatan & pengujian dan proses evaluasi. Hasil evaluasi akan digunakan untuk proses awal lagi sampai dihasilkan produk yang diinginkan.
Pada tahun pertama telah dihasilkan jenis model yang tepat untuk dapat ditransformasikan yaitu Jenis mobile robot beroda 2WD (Wheel Drive) dan jumlah 4 kaki robot berkaki (quadpod). Tahun kedua rancang bangun mobile robot yang dapat bertransformasi secara otomatis setelah mendapatkan data dari sensor yang mendeteksi medan yang akan dilalui. Pada tahun ketiga prototipe yang dihasilkan pada tahun kedua diuji dilapangan,Tahap penelitian, target capaian dan outcome seperti pada gambar 3.2.
Metode atau cara untuk mencapai tujuan yang telah ditetapkan ditulis tidak melebihi 600 kata. Bagian ini dilengkapi dengan diagram alir penelitian yang menggambarkan apa yang sudah dilaksanakan dan yang akan dikerjakan selama waktu yang diusulkan. Format diagram alir dapat berupa file JPG/PNG. Bagan penelitian harus dibuat secara utuh dengan penahapan yang jelas, mulai dari awal bagaimana proses dan luarannya, dan indikator capaian yang ditargetkan. Di bagian ini harus juga mengisi tugas masing-masing anggota pengusul sesuai tahapan penelitian yang diusulkan.
Tahap penelitia
n
Tujuan dan Lingkup
kegiatan Target capaian
Investigasi transformasi model mobile robot
beroda - berkaki
Model robot berkaki & beroda yang dapat disatukan Tahun 1 Outcome Draf jurnal nasional & internasional Rancang bangun transformasi mobile robot
Tahun 2
Prototype transformasi mobile robot berkaki -beroda untuk skala laboratotium Publikasi pada jurnal nasional & submitted jurnal internasional TRL level 1 Pengujian prototipe Tahun 3 Prototype transformasi mobile robot berkaki -beroda Publikasi pada jurnal internasional & draf paten TRL level 3 TRL level 2
Gambar 3.2. Kerangka penelitian
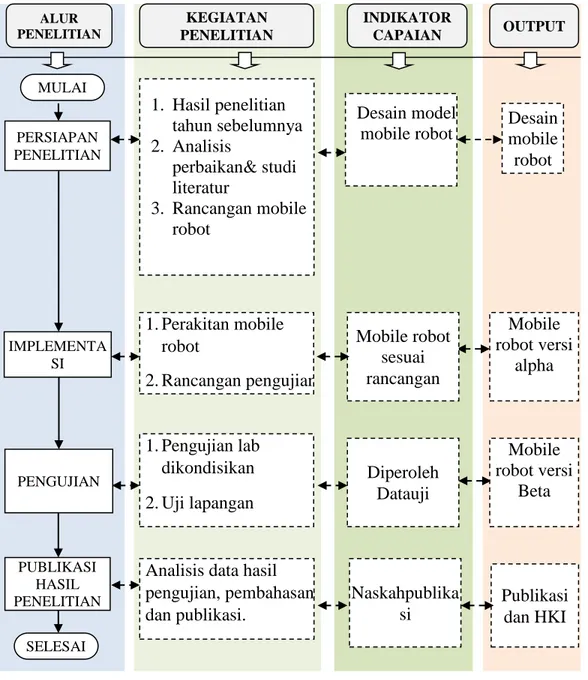
Penjabaran dari kegiatan penelitian yang dilakukan dalam tiap tahun secara garis besar sama dengan output menyesuaikan fokus utama pada tahun yang dimaksud (gambar 3.3). Tiap tahun menghasilkan prototipe mobile robot dengan titik berat yang berbeda.Tahun pertama lebih ke bentuk mekanis, tahun kedua lebih ke kontrol transformasinya dan tahun ketiga adalah prototipe yang sudah jadi.
MULAI 1. Hasil penelitian tahun sebelumnya 2. Analisis perbaikan& studi literatur 3. Rancangan mobile robot Desain mobile robot PERSIAPAN PENELITIAN IMPLEMENTA SI 1.Perakitan mobile robot 2.Rancangan pengujian 1.Pengujian lab dikondisikan 2.Uji lapangan PENGUJIAN PUBLIKASI HASIL PENELITIAN
Analisis data hasil pengujian, pembahasan, dan publikasi. SELESAI ALUR PENELITIAN KEGIATAN PENELITIAN OUTPUT Mobile robot versi alpha Publikasi dan HKI INDIKATOR CAPAIAN Desain model mobile robot Mobile robot sesuai rancangan Diperoleh Datauji Mobile robot versi Beta Naskahpublika si
3.2.Susunan Peneliti dan Tugas pokoknya (Personal in Charge)
No Nama/NIDN Prodi asal Bidang
Ilmu Alokasi Waktu Per-minggu Uraian Tugas
1 Nuryanto T. Informatika (S1) Mobile Robot
8 Merancang model mobile robot , menyusun draft paten
2 Andi Widiyanto T. Informatika (D3) Kontrol otomatis( Microcontr oller) 8 Membuat system microcontroller. Menyusun Artikel
3 Oesman Raliby T. Industri (S1) Manufaktu r 8 Assembling Mobil Robot, Menyusun Draft Paten 4 Rochim Widaryanto T. Informatika (D3) Desain Gambar 8 Menggambar Desain robot dan 3D menggunakan CAD, Membuat Gambar Alat dalam Paten
Jadwalpenelitiandisusundengan mengisi langsung tabel berikut dengan memperbolehkan penambahan baris sesuai banyaknya kegiatan.
JADWAL
Tahun ke-1
Tahun ke-2
No Nama Kegiatan Bulan
1 2 3 4 5 6 7 8 9 10 11 12
1
Persiapan Penelitian (analisis tahun sebelumnya
2 Rancangan mobile robot 3 Pembuatan mobile robot 4 Pengujian
5 Evaluasi dan Penyusunan Artikel 6 Laporan akjhir dan Publikasi
Tahun ke-3
No Nama Kegiatan Bulan
1 2 3 4 5 6 7 8 9 10 11 12
1
Persiapan Penelitian (analisis tahun sebelumnya
2 Pengujian gerak mobile robot 3 Pengujian lapangan mobile robot 4 Evaluasi hasil
5 Penyusunan Draft Paten 6 Laporan akjhir dan Publikasi
DAFTAR PUSTAKA
[1] A. Rahmawan and T. Prahasto, “Optimasi Gripper Dua Lengan dengan Menggunakan
Metode Genetic Algorithm pada Simulator Arm Robot 5 DOF (Degree of Freedom),” J. Tek. Mesin S-1, vol. 1, no. 2, pp. 9–16, 2013.
[2] N. B. Ignell, N. Rasmusson, and J. Matsson, “An overview of legged and wheeled robotic locomotion,” 2012.
Daftar pustaka disusun dan ditulis berdasarkan sistem nomor sesuai dengan urutan pengutipan. Hanya pustaka yang disitasi pada usulan penelitian yang dicantumkan dalam Daftar Pustaka.
[3] DRN, Agenda Riset Nasional 2016-2019. 2016.
[4] LP3M-UMMagelang, RENCANA INDUK PENELITIAN UMMagelang 2016-2020. 2016.
[5] C. Grand, F. Benamar, F. Plumet, and P. Bidaud, “Stability and Traction Optimization of a Reconfigurable Wheel-Legged Robot,” Int. J. Rob. Res., vol. 23, no. 10–11, pp. 1041– 1058, Oct. 2004.
[6] S.-Y. Shen, Cheng-Hsin Li, C.-C. Cheng, J.-C. Lu, S.-F. Wang, and P.-C. Lin, “Design of a leg-wheel hybrid mobile platform,” in 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2009, pp. 4682–4687.
[7] Y.-S. Kim, G.-P. Jung, H. Kim, K.-J. Cho, and C.-N. Chu, “Wheel Transformer: A Wheel-Leg Hybrid Robot With Passive Transformable Wheels,” IEEE Trans. Robot., vol. 30, no. 6, pp. 1487–1498, Dec. 2014.
[8] S. Jacobsen, F. M. Smith, M. Olivier, and C. S. Maggio, “(12) United States Patent,” US 7,017,687 B1, 2006.
LAMPIRAN 1. BIODATA PENGUSUL A. BIODATA KETUA PENGUSUL
Nama NURYANTO S.T, M.Kom
NIDN/NIDK 0605037002
Pangkat/Jabatan -/Lektor
E-mail [email protected]
ID Sinta 5974640
h-Index 0
Publikasi di Jurnal Internasional terindeks
No Judul Artikel Peran (First author, Corresponding author, atau co-author)
Nama Jurnal, Tahun terbit, Volume, Nomor,
P-ISSN/E-ISSN
URL artikel (jika ada)
1
The Concept of Wheeled-Legged Robot
Transformation
first author
Journal of Physics Conference Series (JPCS), 2019, 1196, 012036, 1742-6596
https://iopscience.i
Publikasi di Jurnal Nasional Terakreditasi Peringkat 1 dan 2
No Judul Artikel Peran (First author, Corresponding author, atau co-author)
Nama Jurnal, Tahun terbit, Volume, Nomor,
P-ISSN/E-ISSN
URL artikel (jika ada)
Prosiding seminar/konverensi internasional terindeks
No Judul Artikel Peran (First author, Corresponding author, atau co-author)
Nama Jurnal, Tahun terbit, Volume, Nomor,
P-ISSN/E-ISSN
URL artikel (jika ada)
Buku
No Judul Buku Tahun
Penerbitan ISBN Penerbit URL (jika ada)
Perolehan KI
No Judul KI Tahun
Perolehan Jenis KI Nomor
Status KI
(terdaftar/granted) URL (jika ada)
1 SENSOR ULTRASONIC MENYILANG PADA MOBILE ROBOT 2018 Paten Sederhana Terdaftar -BUKU: Eviews untuk Analisis Ekonometrika Dasar: Aplikasi
dan Interpretasi
Riwayat penelitian didanai Kemenristekdikti
No Judul Tahun Dana Disetujui
1 Transformasi Mobile Robot Menggunakan Multi Sensor 2019-2020 40,995,000
2 Transformasi Mobile Robot Menggunakan Multi Sensor 2018-2019 68,685,000
B. ANGGOTA PENGUSUL 1
Nama ANDI WIDIYANTO S.Kom, M.Kom
NIDN/NIDK 0623087901
Pangkat/Jabatan -/Lektor
E-mail [email protected]
ID Sinta 4551
h-Index 1
Publikasi di Jurnal Internasional terindeks
No Judul Artikel Peran (First author, Corresponding author, atau co-author)
Nama Jurnal, Tahun terbit, Volume, Nomor,
P-ISSN/E-ISSN
URL artikel (jika ada)
1
Prototype of NFC Reader as a Attendance Sign at The Presence System first author Journal of Physics: Conference Series, 2018, 1196, 012042, 1742-6588 https://iopscience.i 2
The Concept of Wheeled-Legged Robot Transformation corresponding author Journal of Physics: Conference Series, 2018, 1196, 012036, 1742-6596 https://iopscience.i
Publikasi di Jurnal Nasional Terakreditasi Peringkat 1 dan 2
No Judul Artikel Peran (First author, Corresponding author, atau co-author)
Nama Jurnal, Tahun terbit, Volume, Nomor,
P-ISSN/E-ISSN
URL artikel (jika ada)
Prosiding seminar/konverensi internasional terindeks
No Judul Artikel Peran (First author, Corresponding author, atau co-author)
Nama Jurnal, Tahun terbit, Volume, Nomor,
P-ISSN/E-ISSN
URL artikel (jika ada)
1
COMPACT ANDROID APPLICATION UNTUK MENGONTROL BLUETOOTH RC-CAR YANG DILENGKAPI IP CAM
first author SEMNASTIKOM 2016, 2016, 1,
1, 1412-9612 https://journal.univ
2
Redirection Concept of Autonomous Mobile Robot HY-SRF05 Sensor to Reduce The Number of Sensors
co-author
International Conference on Electrical Engineering, Computer Science and Informatics , 2017, , , 978-1-5386-0548-6
https://ieeexplore.i
3
Key-less Automatic Lock System using RFID & Smartphone
first author ICETIA 2016, 2016, , ,
1412-9612 https://printorders.
4
User Manual With Augmented Reality To Support Packaging Products
first author ICETIA 2014, 2014, , ,
5 Sistem Mobile Dakwah (M
Dakwah) co-author
SNIK 2013, 2013, , ,
978-602-14724-4-6 https://ilkom.unnes.
6
Rancang Bangun Mobile Robot 2WD Dengan 2 Sensor HC-SRF05 Untuk Menentukan Arah Belokan
co-author SEMNASTEKNOMEDIA 2016,
2016, 4, 1, 2302-3805 https://ojs.amikom.a
7
Sistem Portable untuk Aplikasi Web Menggunakan Batch File Programming
first author SEMNASTEKNOMEDIA 2014,
2014, 2, 1, 2302-3805 https://ojs.amikom.a
8
Rancang Bangun Rekomendasi Pengisian Borang Program Studi Sarjana Dengan Objective Matrix
first author SEMNASTEKNOMEDIA 2013,
2013, 1, 1, 2302-3805 https://ojs.amikom.a
Buku
No Judul Buku Tahun
Penerbitan ISBN Penerbit URL (jika ada)
Perolehan KI
No Judul KI Tahun
Perolehan Jenis KI Nomor
Status KI
(terdaftar/granted) URL (jika ada)
1 PENGATUR TEGANGAN YANG DIKENDALIKAN DENGAN REMOTE CONTROL 2018 Paten Sederhana Terdaftar -2 SENSOR ULTRASONIC MENYILANG PADA MOBILE ROBOT 2019 Paten Terdaftar
-C. ANGGOTA PENGUSUL 2
Nama OESMAN RALIBY AL MANAN S.T, M.Eng
NIDN/NIDK 0603046801
Pangkat/Jabatan -/Lektor Kepala
E-mail [email protected]
ID Sinta 4509
h-Index 0
Publikasi di Jurnal Internasional terindeks
No Judul Artikel Peran (First author, Corresponding author, atau co-author)
Nama Jurnal, Tahun terbit, Volume, Nomor,
P-ISSN/E-ISSN
URL artikel (jika ada)
Publikasi di Jurnal Nasional Terakreditasi Peringkat 1 dan 2
No Judul Artikel Peran (First author, Corresponding author, atau co-author)
Nama Jurnal, Tahun terbit, Volume, Nomor,
P-ISSN/E-ISSN
URL artikel (jika ada)
Prosiding seminar/konverensi internasional terindeks
No Judul Artikel Peran (First author, Corresponding author, atau co-author)
Nama Jurnal, Tahun terbit, Volume, Nomor,
P-ISSN/E-ISSN
URL artikel (jika ada)
1
PENYUSUNAN MODEL INTEGRATED RADIAL CYCLE (IRC) GUNA PENINGKATAN DAYA SAING INDUSTRI MAKANAN OLAHAN DI KABUPATEN CIAMIS, KOTA MAGELANG, DAN
KABUPATEN SIDOARJO
co-author
Prosiding Seminar Nasional Dies Natalis ke-52 Fakultas Pertanian Universitas Sriwijaya, Palembang, 2015, -, -, ISBN 978-979-8389-21-4 http://eprints.unsri 2 ANALISIS PENERAPAN METODE 5R PADA INDUSTRI KERAJINAN SERAT ALAM MENUJU PENCAPAIAN SERTIFIKASI CE MARK
first author
Seminar Nasional IENACO – 2014, 2014, , -, ISSN 2337-4349
https://publikasiilm
3
The Concept of Wheeled-Legged Robot Transformation corresponding author The 1st International Conference on Information System Computer Science and Engineering (ICONISCSE) 2018, 2018, , -, PaperID:1570496017 http://publikasiilmi PERANCANGAN ALAT PENGERING KERUPUK DENGAN MEMANFAATKAN
Prosiding Seminar Nasional Sains Dan Teknologi 2010, 2010, Vol 1, No 1 (2010), -,
GAS BUANG DARI PROSES PRODUKSI PADA INDUSTRI PEMBUATAN KERUPUK ISBN: 978-602-8273-25-1 5 INOVASI TEKNOLOGI MELALUI DIVERSIFIKASI PRODUK GULA KELAPA INDUSTRI RUMAHAN MENUJU USAHA KECIL DINAMIS (Small Dynamic Enterprise) first author IENACO (Industrial Engineering National Conference) 2015, 2016, -, -, ISSN: 2337 – 4349 https://publikasiilm 6
Analisis Perilaku Selamat Karyawan Sabila Craft dengan Metode Behaviour Based Safety guna Mendukung Perolehan Penghargaan SNI Award
co-author IENACO (Industrial Engineering National Conference) 2016, 2016, -, -, ISSN: 2337 – 4349 https://publikasiilm 7 ANALISIS POTENSI UNGGULAN DAERAH KABUPATEN MAGELANG MENUJU ONE VILAGE ONE PRODUCT first author IENACO (Industrial Engineering National Conference) 2015, 2016, -, -, ISSN: 2337 – 4349 https://publikasiilm 8 Optimalisasi Pemanfaatan Pekarangan Rumah Melalui Budidaya Tanaman Herbal Sesuai Good Agriculture Practices di Desa Growong, Kecamatan Tempuran, Kabupaten Magelang co-author Proceeding 6th University Research Colloquium 2017, 2017, -, -, ISSN 2407-9189 http://journal.ummgl 9 FORMULASI KEBERLANJUTAN INDUSTRI KECIL
MENENGAH OLAHAN GULA KELAPA MENUJU
INDUSTRI KECIL DINAMIS
first author
Prosiding Seminar Nasional seri 7 “Menuju Masyarakat Madani dan Lestari”, 2017, , , e-ISBN: 978-602-450-211-9 p-ISBN: 978-602-450-210-2
https://dspace.uii.a
10
Pengembangan Model Inovasi Teknologi Bagi Produk Gula Kelapa Industri Rumahan (Livelihood Activity) Menuju Usaha Industri Berkelanjutan
first author
Prosiding Temu Ilmiah Nasional 'Peran Iptek dalam Mewujudkan Nawa Cita", 2016, , , ISBN : 978-602-449-011-9
http://disperpusip.j
Buku
No Judul Buku Tahun
Penerbitan ISBN Penerbit URL (jika ada)
Perolehan KI
No Judul KI Tahun
Perolehan Jenis KI Nomor
Status KI
(terdaftar/granted) URL (jika ada)
1 MESIN PEMBELAH TAHU 2012 Paten Sederhana Terdaftar https://pdki-indones
D. ANGGOTA PENGUSUL 3
Nama ROCHIM WIDARYANTO S.T, M.T
NIDN/NIDK 0628078503
Pangkat/Jabatan -/Tidak Punya
ID Sinta 6643531
h-Index 0
Publikasi di Jurnal Internasional terindeks
No Judul Artikel Peran (First author, Corresponding author, atau co-author)
Nama Jurnal, Tahun terbit, Volume, Nomor,
P-ISSN/E-ISSN
URL artikel (jika ada)
Publikasi di Jurnal Nasional Terakreditasi Peringkat 1 dan 2
No Judul Artikel Peran (First author, Corresponding author, atau co-author)
Nama Jurnal, Tahun terbit, Volume, Nomor,
P-ISSN/E-ISSN
URL artikel (jika ada)
Prosiding seminar/konverensi internasional terindeks
No Judul Artikel Peran (First author, Corresponding author, atau co-author)
Nama Jurnal, Tahun terbit, Volume, Nomor,
P-ISSN/E-ISSN
URL artikel (jika ada)
Buku
No Judul Buku Tahun
Penerbitan ISBN Penerbit URL (jika ada)
Perolehan KI
No Judul KI Tahun
Perolehan Jenis KI Nomor
Status KI
REPUBLIK INDONESIA
KEMENTERIAN HUKUM DAN HAK ASASI MANUSIA
SURAT PENCATATAN
CIPTAAN
Dalam rangka pelindungan ciptaan di bidang ilmu pengetahuan, seni dan sastra berdasarkan Undang-Undang Nomor 28 Tahun 2014 tentang Hak Cipta, dengan ini menerangkan:
Nomor dan tanggal permohonan : EC00201814382, 4 Juni 2018
Pencipta
Nama : Nuryanto, ST., M.Kom, Zulfikar Bagus Pambuko, SEI.,
MEK,
Alamat : Dusun Gejayan RT 01 RW 06 Polengan, Srumbung,
Magelang, Jawa Tengah, 56483
Kewarganegaraan : Indonesia
Pemegang Hak Cipta
Nama : Universitas Muhammadiyah Magelang
Alamat : Jl. Mayjend Bambang Soegeng KM 5 Mertoyudan Magelang,
Magelang, Jawa Tengah, 56172
Kewarganegaraan : Indonesia
Jenis Ciptaan : Buku
Judul Ciptaan : Eviews Untuk Analisis Dasar : Aplikasi Dan Interpretasi
Tanggal dan tempat diumumkan untuk pertama kali di wilayah Indonesia atau di luar wilayah Indonesia
: 14 April 2018, di Magelang
Jangka waktu pelindungan : Berlaku selama 50 (lima puluh) tahun sejak Ciptaan tersebut
pertama kali dilakukan Pengumuman.
Nomor pencatatan : 000109774
adalah benar berdasarkan keterangan yang diberikan oleh Pemohon.
Surat Pencatatan Hak Cipta atau produk Hak terkait ini sesuai dengan Pasal 72 Undang-Undang Nomor 28 Tahun 2014 tentang Hak Cipta.
a.n. MENTERI HUKUM DAN HAK ASASI MANUSIA DIREKTUR JENDERAL KEKAYAAN INTELEKTUAL
Dr. Freddy Harris, S.H., LL.M., ACCS. NIP. 196611181994031001
LAMPIRAN PENCIPTA
No Nama Alamat
1 Nuryanto, ST., M.Kom Dusun Gejayan RT 01 RW 06 Polengan, Srumbung
2 Zulfikar Bagus Pambuko, SEI.,
MEK
Nitikan Kranon UH 6/576C RT.044/RW.011, Sorosutan, Umbulharjo, Kota Yogyakarta, DI.Yogyakarta
(20) RI Permohonan Paten
(19) ID (11) - (13) A
(51) IPC : A23P 1/00, B26D 5/08
(21) No. Permohonan Paten : S00201200112 (22) Tanggal Penerimaan Permohonan Paten :
25 Jun 2012
(30) Data Prioritas :
(31) Nomor (32) Tanggal (33) Negara
(43) Tanggal Pengumuman Paten :
27 Sep 2012
(71) Nama dan Alamat yang Mengajukan Permohonan Paten :
1) DRA. RETNO RUSDJIJATI, M.KES 2)OESMAN RALIBY, ST.M.ENG 3)BAGIYO CONDRO PURNOMO,ST 4) MUJI SETIYO, ST, Tegakarum Rt. 02 Rw. 15 No. 60 Banjarnegoro Mertoyudan Magelang, ID
(72) Nama Inventor :
Oesman Raliby, ST, M.Eng, ID Bagiyo Condro Purnomo, S, ID Muji Setiyo, ST, ID
Dra. Retno Rusdjijati, M.Kes, ID
(74) Nama dan Alamat Konsultan Paten :
-(54) Judul Invensi : MESIN PEMBELAH TAHU (57) Abstrak :
Kerupuk atau keripik tahu merupakan salah satu olahan pangan yang khas di Kota Magelang. Industri pengolahnya tersentra di Kampung Trunan Kota Magelang, dengan jumlah industri dari mikro hingga menengah kurang lebih 10 industri. Industri ini yang selanjutnya disebut IKM (Industri Kecil Menengah), umumnya bersifat padat karya karena banyak membutuhkan tenaga kerja terutama kaum wanita pada proses produksi pembelahan tahu pong yang sudah digoreng. Pada proses pembelahan tahu tersebut hanya digunakan gunting untuk membelah tahu menjadi dua. Berdasarkan hasil wawancara dengan sejumlah tenaga kerja, mereka mampu membelah tahu per orang per menitnya rata-rata 50-70 biji tahu. Namun mereka juga menyatakan bahwa sering muncul rasa nyeri dan ngapal pada tangan, cepat lelah, dan nyeri pada pinggang. Hal ini disebabkan karena alat dan posisi kerjanya tidak ergonomis (duduk lesehan di lantai, di atas tikar, atau dingklik). Di sisi lain ditinjau dari pihak pengusaha, proses tersebut membutuhkan biaya produksi yang cukup besar, karena membutuhkan banyak tenaga kerja dengan kapasitas kerja yang tidak optimal. Oleh karena itu jika dibiarkan, maka perusahaan akan mengalami kerugian. Sehubungan dengan hal tersebut, maka tim dari Fakultas Teknik Universitas Muhammadiyah Magelang bermaksud membantu para pekerja dan IKM nya sendiri untuk memecahkan permasalahan yang dihadapi melalui
perancangan atat pembelah tahu mekanis. Alat pembelah tahu pong ini dirancang dengan menggunakan prinsip-prinsip ergonomis artinya mampu meningkatkan kapasitas produksi, kenyamanan kerja, dan produktivitas kerja. Dengan menggunakan daya motor sebesar ¾ hp, kecepatan putar motor 1430 rpm, putaran roller 50 rpm, putaran pisau 50 rpm, jumlah pisau 4 buah, mampu membelah tahu pong sebanyak 200-400 buah per menit. Alat pembelah tahu tersebut dirancang dengan bahan-bahan yang murah dan mudah diperoleh, sehingga harganya cukup terjangkau bagi IKM. Di samping itu dapat pula digunakan untuk membelah bahan pangan yang teksturnya mirip dengan tahu seperti tempe, kentang, kue, atau roti. Dengan modifikasi pisau, dapat juga digunakan untuk membelah singkong. ketela rambat, atau talas.
PERSETUJUAN USULAN
Tanggal Pengiriman Tanggal Persetujuan Nama Pimpinan
Pemberi Persetujuan Sebutan Jabatan Unit
Nama Unit Lembaga Pengusul
25 Oktober 2018 27 Oktober 2018 Dr HENI SETYOWATI
ESTI RAHAYU M.Kes Ketua LP3M
Lembaga Penelitian, Pengembangan, dan Pengabdian Kepada Masyarakat (LP3M)