Prediksi Cuaca Kota Surabaya Menggunakan Autoregressive Integrated Moving Average (Arima) Box Jenkins dan Kalman Filter
Teks penuh
Gambar
Dokumen terkait
menyatakan dengan sesungguhnya bahwa karya ilmiah berupa skripsi yang berjudul: Akurasi Metode Exponential Smoothing dan Metode Autoregressive Integrated Moving
menyatakan dengan sesungguhnya bahwa karya ilmiah berupa skripsi yang berjudul: Akurasi Metode Exponential Smoothing dan Metode Autoregressive Integrated Moving
menyatakan dengan sesungguhnya bahwa karya ilmiah berupa skripsi yang berjudul: Akurasi Metode Exponential Smoothing dan Metode Autoregressive Integrated Moving
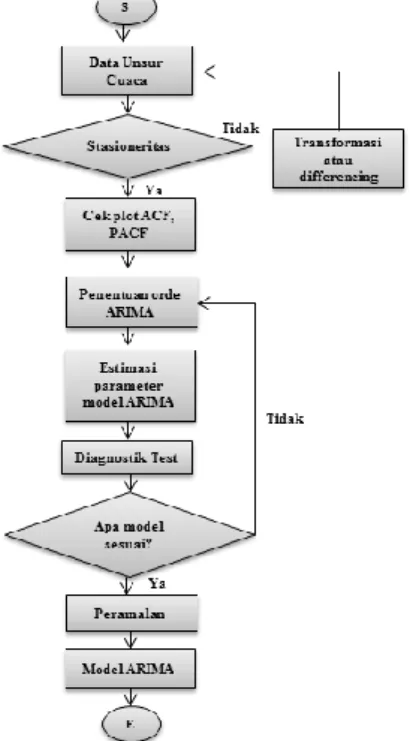
Melakukan peramalan dengan menggunakan metode ARIMA (Autoregressive Integrated Moving Average) di mana hasil peramalan didasarkan pada pengamatan data dari jumlah
Autoregressive Integrated Moving Average (ARIMA) adalah model deret waktu univariat yang sangat berguna untuk peramalan indeks harga saham dengan menggunakan autokorelasi dan
Penelitian ini bertujuan agar mengetahui tingkat akurasi metode ini dan mendapatkan model terbaik dari metode SARIMA Seasonal Autoregressive Integrated Moving Average dalam Prediksi
This study aimed to predict COVID-19 cases in East Java Province using the Autoregressive Integrated Moving Average ARIMA method based on data analysis from March 2020 to January 2022..
Pada penelitian ini diramalkan IHK untuk 6 bulan ke depan dari Januari 2023 sampai dengan Juni 2023 yang menggunakan model Autoregressive Integrated Moving Average ARIMA.. Hasil
