Perancangan Kontroler Fuzzy untuk Tracking Control
Robot Soccer
Gunawan Wibisono
Jurusan Teknik Elektro ITS, Surabaya 60111, email: [email protected]
Abstract – Beberapa tahun terakhir ini
perkembangan teknologi di bidang robotika telah menjadi perhatian yang cukup serius. Masalah utama bagi suatu aplikasi robot soccer adalah kemampuan navigasi yang otomatis dan handal. Oleh karena itu, pada makalah ini disajikan implementasi kendali logika fuzzy pada sistem navigasi untuk proses pencarian suatu target tertentu.
Sebagai masukan dari sistem fuzzy adalah jarak robot soccer ke tujuan dan posisi sudut robot soccer terhadap target dalam bentuk jarak dan sudut terhadap target. Keluaran sistem fuzzy adalah posisi kemudi robot soccer dan kecepatan maju atau mundur dari robot soccer. Dalam sistem ini digunakan kamera untuk mengetahui posisi dan orientasi dari robot soccer dan musuh serta arena yang digunakan.
Salah satu konsep yang berkembang adalah fuzzy logic. Hal yang ingin diperoleh dari perancangan kontroler menggunakan fuzzy adalah mendapatkan mobilitas yang baik dari robot soccer dalam hal pencarian suatu target serta keakuratan terhadap jarak yang dicapai pada saat proses tracking sebesar lebih dari 90%.
Kata Kunci: robot soccer, fuzzy logic, tracking
I PENDAHULUAN
Robot berasal dari bahasa Cekoslowakia "robota" yang berarti pelayan atau tenaga kasar, di mana pengertiannya adalah mesin yang dapat bekerja sendiri tanpa kendali atau campur tangan manusia dan biasanya pergerakannya meniru pergerakan sendi-sendi manusia [7]. Robot dibuat untuk melakukan pekerjaan yang bersifat berulang (repetitif), membosankan, kotor, berbahaya dan memerlukan ketekunan yang tinggi. Dalam perkembangannya, robot dewasa ini bukan hanya mesin yang melakukan gerakan- gerakan berulang tetapi telah melibatkan kecerdasan dan keluwesan. Perkembangan teknik kendali dan otomatisasi yang didukung oleh teknologi informatika dan mikro- elektronika telah melahirkan robot sebagai suatu perangkat industri yang dapat meningkatkan produktivitas, standar mutu, efisiensi dan dapat menyelesaikan pekerjaan yang tidak dapat dilakukan sebelumnya oleh manusia, seperti robot untuk dekontaminasi radiasi atau robot untuk menjelajah permukaan planet Mars (Rover).
Mobile robot otonom adalah suatu jenis robot cerdas yang mempunyai kemampuan untuk membuat keputusan sendiri, memiliki sistem kendali dan catu daya yang terintegrasi dan mempunyai kemampuan navigasi yaitu sejumlah operasi yang
memungkinkan robot mencapai tujuan yang diharapkan. Ada dua jenis mobile robot yaitu robot yang berjalan dengan menggunakan kaki-kaki mekanik dan robot yang berjalan dengan roda.
Penggunaan teknologi fuzzy logic telah cukup meluas pada berbagai aplikasi mulai dari kendali proses industri, peralatan elektronika ,rumah tangga, elektronik medika dan lain-lain [1]. Demikian juga penerapan logika fuzzy pada kendali robot. Pada makalah ini akan menyajikan implementasi kendali logika fuzzy pada sistem navigasi dari sebuah robot mobil. Tujuan dari penelitian ini adalah mengimplementasikan sistem logika fuzzy pada sistem navigasi dari robot soccer .Dengan dapat diterapkannya sebuah konsep pada sebuah robot, maka akan memberikan kemudahan dalam menentukan kaidah kendali yang dipergunakan untuk membawa proses tersebut keperformansi yang dikehendaki.
Beberapa penerapan konsep pada robot telah berkembang. Salah satu konsep yang berkembang adalah penggunaan konsep fuzzy . Konsep ini muncul dari kenyataan bahwa permasalahan yang komplek memerlukan sistem yang cerdas dalam menggabungkan pengetahuan, teknik dan metoda dari berbagai sumber. Sistem kendali fuzzy adalah sistem berbasis pengetahuan yang dirumuskan dalam bentuk aturan-aturan (rules base) sebagai akumulasi dari suatu pengalaman. Logika fuzzy dikembangkan pertama kali oleh Dr. Lotti A. Zadeh [2] untuk merumuskan secara matematik konsep ketidak pastian atau kesamaran sehingga dapat diproses oleh komputer. Dengan menerapkan logika fuzzy pada program komputer, sistem kendali dapat memutuskan seperti cara manusia berpikir. Kemampuan inilah yang disebut sebagai kecerdasan buatan pada sistem kepakaran fuzzy.
Sistem cerdas ini diharapkan memiliki kemampuan seperti manusia, beradaptasi dan belajar lebih baik dari perubahan lingkungan dan menjelaskan dasar pengambilan keputusan. Salah satu konsep yang berkembang adalah fuzzy, Sistem kendali fuzzy adalah sistem berbasis pengetahuan yang dirumuskan dalam bentuk aturan-aturan (rules base) sebagai akumulasi dari suatu pengalaman Dalam tugas akhir ini akan dibahas penggunaan fuzzy logic untuk melakukan penanaman alogaritma pada sebuah robot soccer.
Pada makalah ini terdapat lima bagian penting. Bagian 1 merupakan pendahuluan. Bagian 2 adalah pendiskripsian mengenai sistem robot soccer. Bagian 3 menjelaskan perancangan sistem. Bagian 4 membahas mengenai implementasi dan analisis. Bagian 5 menjelaskan beberapa kesimpulan dan saran.
II PENDISKRIPSIAN SISTEM ROBOT SOCCER Pada robot sering digunakan istilah-istilah untuk menunjukkan geometri dan spesifikasi robot seperti "poros gerakan" dan "derajat kebebasan". Setiap benda bergerak berarti menempuh jarak dari satu titik ke titik lain yang berada pada satu bidang. Pergerakan ini mempunyai garis sumbu atau titik yang tidak berubah yang disebut poros. Jadi poros gerakan merupakan titik atau pusat terjadinya gerakan. Derajat kebebasan adalah jumlah arab bebas (independent) dari suatu robot (end effector) yang menentukan arah dari pergerakannya. Parameter-parameter yang bertindak sebagai variabel masukan dari robot soccer adalah koordinat posisi (x, y) yaitu titik pusat robot dan sudut arah (Φ) yaitu sudut antara sumbu x dengan poros robot. Sebagai variabel keluarannya adalah sinyal sudut-pengarah (θ) yaitu sudut antara poros dengan arah roda. Pada Gambar 2.1 ditunjukan diagram simulasi dari posisi dan sudut arah robot.
Gambar 2.1 Simulasi dari posisi dan sudut robot Setiap langkah dari sistem kendali memberikan sinyal berupa besar sudut pengarah (θ) yang menuntun robot menuju target dari suatu posisi awal. Keberhasilan dari pengendalian adalah: pertama dapat mencapai tujuan yang diinginkan dan kedua memberikan jalur lintasan yang optimal, yaitu tidak adanya langkah-langkah yang tidak perlu dan tidak berputar-putar secara tidak beraturan. Untuk prinsip pengendalian langkah robot ditunjukan pada Gambar 2.2
Gambar 2.2 Prinsip pengendalian langkah robot Struktur model robot banyak sekali diteliti oleh berbagai pihak, model hexapod, model bipedal, model beroda dan masih banyak lagi. Tetapi jenis model yang cocok diimplementasikan pada robot soccer adalah jenis robot beroda yang relatif stabil dan umum
digunakan pada aplikasi robot soccer [5]. Secara keseluruhan tampilan konstruksi perangkat keras yang membangun plant dapat dilihat pada Gambar 2.3. Pemilihan dan peletakan roda sebagai penyeimbang telah didesain sedemikian rupa, sehingga fungsi dari plant dapat berjalan dengan baik.
Gambar 2.3 Tampilan mobile robot secara lengkap
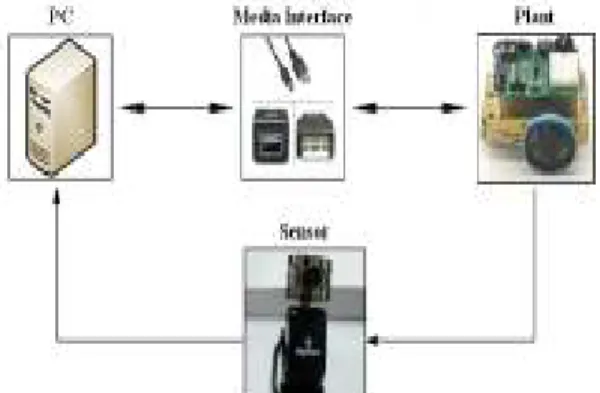
2.1 Arsitektur sistem tracking pada robot soccer Sistem tracking pada robot soccer dengan menggunakan image prosessing mempunyai bentuk diagram blok seperti Gambar 2.4. Kontroler yang digunakan pada kinerja sistem adalah PC. Untuk proses penanaman kecerdasan pada robot serta pengolahan pengenalan citra diolah seluruhnya oleh PC dengan mengintegrasikan kedua apilasi tersebut. Untuk menghubungkan PC dengan plant dan webcam dibutuhkan media interface berupa kabel penghubung. Pada diagram blok sistem tracking robot soccer tampak bahwa data hasil pengolahan webcam berupa titik koordinat (x,y) yang ditampilkan dan dimonitoring pada PC, data – data tersebut dibaca dan diolah sedemikin rupa sehingga menjadi titik acuan yang dijadikan masukan pada kontroler untuk memberikan sinyal kontrol terhadap plant [4]. Untuk sinyal umpan baliknya digunakan sensor yang membaca koordinat terbaru dari obyek yang diamati.
Gambar 2.4 Diagram blok sistem tracking robot soccer
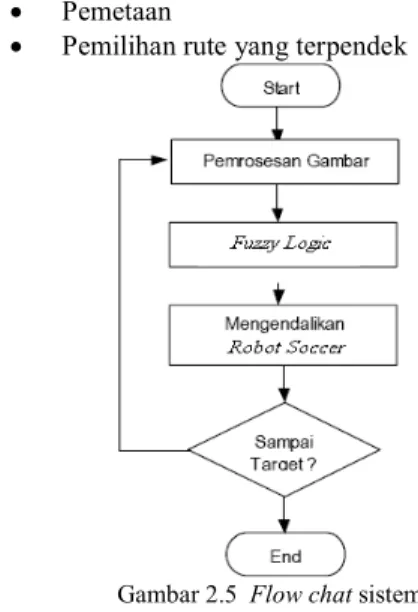
Diagram alir kinerja tracking robot soccer dapat dilihat pada Gambar 2.5 Perancangan dapat dikembangkan untuk mencari solusi yang paling rasional. Cara pengembangan alternatif bisa melalui ketentuan natural sistem, analogi atau kemiripan, dan pengulangan fungsi. Proses pemilihan alternatif dilakukan berdasarkan parameter dan sasaran yang telah ditentukan sebelumnya.
2.2 Tracking robot soccer
Proses tracking merupakan proses navigasi dari suatu robot soccer yang digunakan dalam penentuan arah gerak robot menuju suatu tujuan tertentu [3]. Secara garis besar tracking pada sebuah robot soccer menurut lintasannya dibedakan menjadi 2 bagian yaitu:
1. Lintasan tetap (Lintasan yang telah dirancang sedemikian rupa).
2. Lintasan bebas
Lintasan bebas pada tracking sebuah robot adalah lintasan yang arah lintasannya tidak memiliki pola lintasan yang tetap atau dapat disimpulkan bahwa lintasan bebas adalah lintasan yang pola lintasannya dapat berubah – ubah sesuai dengan objek yang akan dituju. Fitur dasar yang diterapkan pada proses tracking robot soccer dibedakan menjadi dua bagian :
• Pemetaan
• Pemilihan rute yang terpendek
Gambar 2.5 Flow chat sistem
III PERANCANGAN SISTEM
Dalam sistem logika fuzzy, sebagai crisp masukan adalah jarak antara robot soccer dan tujuan, serta sudut orientasi robot soccer. Crisp keluaran dari sistem logika fuzzy adalah posisi sudut kemudi dari robot soccer dan kecepatan robot soccer..
3.1 Intelegent robot soccer
Logika fuzzy merupakan representasi suatu pengetahuan yang dikonstruksikan dengan perintah if-then rules [6]. Karakteristik dari metode ini adalah:
• Pemecahan masalah dilakukan dengan menjelaskan sistem bukan lewat angka-angka, melainkan secara linguistik, atau variabel-variabel yang mengandung ketakpastian / ketidaktegasan.
• Pemakaian perintah if-then rules untuk menjelaskan kaitan antara satu variabel dengan yang lain.
Pada perancangan logika fuzzy ditetapkan jenis metode fuzzy Mamdani. Metode Mamdani sering juga dikenal dengan nama Metode Max-Min. Metode ini
diperkenalkan oleh Ebrahim Mamdani pada tahun 1975. Untuk memperoleh output, diperlukan 4 tahapan yaitu :
1. Pembentukan himpunan fuzzy
Pada metoda mamdani, baik variabel input maupun variabel output dibagi menjadi satu atau lebih himpunan fuzzy.
2. Aplikasi fungsi implikasi (aturan)
pada metode Mamdani, fungsi implikasi yang digunakan adalah MIN
3. Komponen aturan
Pada tahapan ini sistem terdiri dari
beberapa
aturan, maka inferensi diperoleh dari kumpulan dan korelasi antar aturan. Ada 3 metode yang digunakan dalam melakukan inferensi sistem fuzzy, yaitu : max, additive dan probabilistik OR. Pada metode max, solusi himpunan fuzzy diperoleh dengan cara mengambil nilai maksimum aturan, kemudian menggunakannya untuk memodifikasi daerah fuzzy, dan mengaplikasikanya ke output dengan menggunakan operator OR (union).4. Penegasan (defuzzifikasi)
Input dari proses defuzzifikasi adalah suatu himpunan fuzzy yang diperoleh dari komposisi aturan-aturan fuzzy, sedangkan output yang dihasilkan merupakan suatu bilangan pada domain himpunan fuzzy tersebut. Jika diberikan suatu himpunan fuzzy dalam range tertentu, maka harus dapat di ambil suatu nilai crisp tertentu sebagai output.
Gambar 3.1 Sistem kendali fuzzy robot soccer Pada Gambar 3.1 diperlihatkan bagan dasar dari suatu sistem kendali fuzzy yang terdiri darii tiga lapis dasar yaitu: fuzzifikasi, mekanisme menarik kesimpulan dan defuzzifikasi. Fuzzifikasi adalah mengubah atribut-atribut basil pengukuran fisik ke dalam konsep fuzzy. Konsep fuzzy tidak bekerja secara biner (himpunan crips) tetapi berupa himpunan fuzzy di mana elemen-elemennya dinyatakan dengan pasangan
Dalam sistem logika fuzzy,sebagai crisp masukan adalah jarak antara robot mobil dan tujuan, sudut orientasi robot mobil terhadap target. Crisp keluaran dari sistem logika fuzzy adalah posisi sudut kemudi dari robot soccer. Pada penentuan posisi robot soccer terhadap tujuan yang akan dicapai terbagi menjadi
lima sub-himpunan fuzzy yaitu : LE (Left), LC (Left Center), CE (Center), RC (Right Center), RI (Right). Pada Gambar 3.2 dapat dilihat fungsi keanggotaan fuzzy dalam penentuan posisi robot soccer terhadap tujuan yang akan dicapai
Gambar 3.2 Fungsi keanggotaan fuzzy posisi (X) Pada penentuan sudut orientasi relatif dengan tujuan dibagi menjadi tujuh sub-himpunan fuzzy : RB (Right Below), RV (Right Upper), RV (Right Vertical), VE (Vertical), LV (Left Vertical), LV (Left Upper), dan LB (Left Below). Pada Gambar 3.3 dapat dilihat fungsi keanggotaan fuzzy dalam penentuan sudut antara poros sumbu x dengan poros robot
.
Gambar 3.3 Fungsi keanggotaan fuzzy sudut (Φ) Sebagai variabel keluarannya adalah sinyal sudut pengarah θ yaitu sudut antara poros dengan arah roda. Variabel keluaran dibagi menjadi tujuh sub-himpunan fuzzy : NB
(Negative Big), NM (Negative Medium), NS (Negative Small), ZE (Zero), PS (Positive Small), PM (Positive Medium), dan PB (Positive Big).
Gambar 3.4 dapat dilihat fungsi keanggotaan fuzzy dalam penentuan sudut antara poros dengan arah roda.
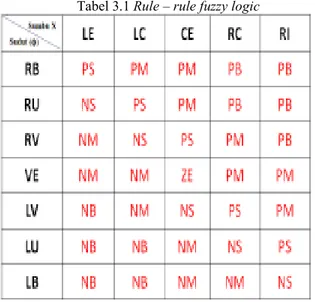
Gambar 3.4 Fungsi keanggotaan fuzzy sudut (θ) Terdapat 35 rule (aturan main) yang digunakan pada penerapan logika fuzzy, adapun rule yang digunakan pada penerapan logika fuzzy ditunjukan pada Tabel 3.1
Tabel 3.1 Rule – rule fuzzy logic
Pada rule 1 dapat diartikan apabila kondisi x berada pada sebelah kiri dan ф berada pada kanan bawah maka sinyal sudut pengarahnya ө harus positif kecil. Pada rule 17 dapat diartikan apabila kondisi x berada pada sebelah kiri tepat dan ф berada pada keadaan vertikal maka sinyal sudut pengarahnya ө harus negatif sedang .Sedangkan pada rule 35 dapat diartikan apabila kondisi x berada pada sebelah kanan dan ф berada pada kiri bawah maka sinyal sudut pengarahnya ө harus negatif kecil.
IV IMPLEMENTASI DAN ANALISA Pada bagian ini akan dibahas mengenai data – data hasil pengujian terhadap sistem, mulai dari pengujian webcam sebagai indra penglihatan robot, tampilan pemrograman pada perangkat lunak Delphi yang akan diintegrasikan dengan plant serta penganalisaan terhadap data- data hasil proses tracking
4.1 Pengujian webcam untuk pengenalan arena robot soccer
Pada pengujian ini ketinggian kamera diatur sedemkian rupa sehingga tangkapan kamera sebagai indra penglihatan dari robot mampu mendeteksi seluruh kondisi lapangan. Dari hasil capture webcam akan disampaikan pada robot soccer melalui pemrograman komputer untuk mendapatkan informasi mengenai keadaan disekitarnya. Dari proses pengujian webcam didapatkan letak dan ukuran lapangan yang telah diolah dalam satuan piksel. Gambar 4.1 menunjukkan tangkapan lapangan yang telah diolah oleh webcam. Ukuran lapangan yang terjangkau dalam capture webcam adalah sebesar 320 x 240 piksel, dengan ketinggian kamera 250 cm dari alas lapangan.
Gambar 4.1 Tampilan lapangan pada PC
4.2 Tampilan pemrograman sistem
Pemrograman yang dibuat untuk penerapan logika fuzzy pada proses tracking robot soccer menggunakan dua perangkat lunak yaitu Delphi dan Basic Stamp. Semua rule yang didapatkan dari aturan – aturan fuzzy diterapkan dengan menggunakan pemrograman Delphi, setelah itu perintah dari kontroler akan diolah terlebih dahulu oleh pemrograman Basic Stamp dalam menggerakkan roda penggerak pada robot soccer. Tampilan pemrograman secara keseluruhan dapat dilihat pada Gambar 4.2
Gambar 4.2 Tampilan sistem secara keseluruhan
4.3 Proses tracking robot soccer
Setelah mendapatkan rule – rule fuzzy pada Bagian ketiga maka penerapan dan pengimplementasian aturan –aturan tersebut coba diterapkan pada kinerja robot soccer. Pada Gambar 4.3. merupakan penerpan dari rule – rule fuzzy dimana kondisi bola berada pada pada sebelah kiri dan posisi bola terhadap lapangan berada pada kondisi negatif big, pada kondisi awal posisi robot soccer berada pada koordinat (29,17) sedangkan koordinat bola berada pada (166,205) maka robot soccer akan melakukan pergerakan tracking membentuk kurva ekponensial dengan sudut pengarah negatif big.
Gambar 4.3 Proses tracking rule pertama Pada Gambar 4.4. merupakan penerpan dari rule – rule fuzzy dimana kondisi bola berada pada pada sebelah kiri dan posisi bola terhadap lapangan berada pada kondisi negatif small, pada kondisi awal posisi robot soccer berada pada koordinat (29,17) sedangkan koordinat bola berada pada (161,132) maka robot soccer akan melakukan pergerakan tracking membentuk kurva ekponensial dengan sudut pengarah negatif small ( membentuk kurva lengkung).
Gambar 4.4 Proses tracking rule kedua
Pada Gambar 4.5. merupakan penerpan dari rule – rule fuzzy dimana kondisi bola berada pada pada
sebelah kiri dan posisi bola terhadap lapangan berada pada kondisi positif small, pada kondisi awal posisi robot soccer berada pada koordinat (21,203) sedangkan koordinat bola berada pada (168,62) maka robot soccer akan melakukan pergerakan tracking membentuk kurva ekponensial dengan sudut pengarah positif small ( membentuk kurva tajam). Arah dari putaran sudut dikatakan negatif apabila berlawanan dengan jarum jam dan dikatakan positif apabila searah dengan jarum jam.
4.4 Keakuratan tracking robot soccer
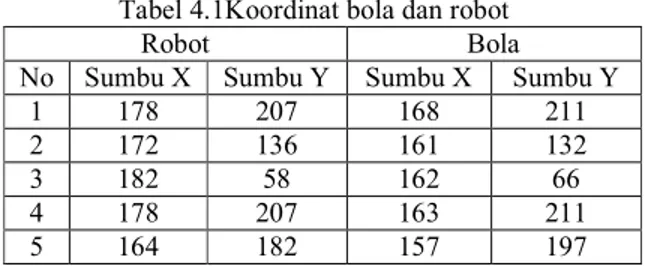
Dari hasil penelitian yang dilakukan pada saat proses tracking robot soccer, maka didapatkan beberapa data titik koordinat bola dan titik koordinat robot soccer yang ditunjukkan pada Tabel 4.1
Tabel 4.1Koordinat bola dan robot
Robot Bola
No Sumbu X Sumbu Y Sumbu X Sumbu Y
1 178 207 168 211
2 172 136 161 132
3 182 58 162 66
4 178 207 163 211
5 164 182 157 197
Dari data pada Tabel 4.1 didapatkan keakuratan dari proses tracking robot soccer sebesar 91%. Hal ini dipengaruhi oleh daerah luasan yang terlingkupi oleh gripper yang terpasang pada robot.
V KESIMPULAN
Dari percobaan-percobaan yang telah dilakukan pada pengerjaan tugas akhir ini, maka dapat diambil beberapa kesimpulan bahwa penerapan sistem logika fuzzy dapat diimplementasikan dalam sistem navigasi untuk sebuah robot soccer.
Sistem logika fuzzy dapat meningkatkan kualitas pergerakan dari robot soccer dalam hal pencarian suatu target (tracking obyek) dan mendapatkan keakuratan pada proses tracking robot soccer sebesar lebih dari 90% . Selain bermanfaat untuk meminimalisasikan waktu pada sistem navigasi sebuah robot soccer,penerapan logika fuzzy juga bermanfaat untuk mendapatkan keefektifan gerak yang dilakukan oleh robot tersebut.
REFERENSI
[1] Klir, George J dan Yuan Bo. “Fuzzy Setsand Fuzzy Logics : Theory and Applications”, New Jersey: Prentice- Hall Inc., 1995.
[2] LX Wang, adaptive Fuzzy System and Control, Prentice Hall Inc, 1994
[3] Thiang, Irwan Kristanto Julistiono, dan Hendra Widjaja Robot Mobil dengan Kendali Logika Fuzzy,Petra University,2000.
[4] Park, Jae Seok, Ryoo, Jung Rae, Myung Jin.,
“Visual Tracking for a Manipulator using Fuzzy Rule-Based System”, IEEE International Fuzzy System Conference Proceedings, Agustus 1999. [5] M.W. Spong and M. Vidyasagar, Robot
Dynamics and Control, New York, NY: John Wiley and Sons, 1989.
[6] Pirjanian, P.(1999) ,“Behavior coordination mechanisms—State-of-the-art”, Techical Report IRIS (Institute of Robotics and Intelligent Systems),University of Southern California, hal 99- 375.
[7] Syamsa Ardisasmita “Pengembangan Robot Mobil Otonom Menggunakan Sistem Kendall Fuzzy Dan Jaringan Syaraf Tiruan” Pusat Pengembangan Teknologi Informasi dan Komputasi,2003.
RIWAYAT HIDUP
Gunawan Wibisono, akrab dipanggil Gunawan, lahir di Surabaya pada tanggal 6 Nopember 1986. Merupakan anak kedua dari 2 bersaudara pasangan Bapak Tan Alex dan Ibu Enny Kusuma Winoto. Pada masa anak – anak penulis sempat mengenyam pendidikan di taman kanak – kanak dan di sekolah dasar Baptis Pengharapan Pandegiling – Surabaya, kemudian penulis melanjutkan studinya di SMPK Stella Maris. Setelah lulus dari Sekolah Menengah Umum Katolik (SMUK) Stella Maris – Surabaya, penulis melanjutkan pendidikan tingkat tinggi di Jurusan Teknik Elektro ITS dengan cara lintas jalur dari Diploma III Teknik Elektro ITS. Penulis memfokuskan konsentrasinya pada bidang studi Teknik Sistem Pengaturan (TSP). Pada bulan Juni 2010 penulis mengikuti seminar dan ujian tugas akhir pada bidang studi Teknik Sistem Pengaturan (TSP), Jurusan Teknik Elektro, FTI – ITS sebagai salah satu persyaratan untuk mempeeroleh gelar sarjana Teknik.