LAPORAN PROYEK AWAL
“KONTROL LAMPU OTOMATIS BERBASIS
MIKROKONTROLER”
Diajukan Sebagai Syarat Kelulusan Mata Kuliah Latihan Proyek Akhir (LPA) Semester V Pada Program Studi Teknik Telekomunikasi Jurusan Teknik Elektro
Politeknik Negeri Ujung Pandang
Disusun Oleh :
Muhammad Ismail Basir Chairil Anam RH 06 36 026 06 36 047
PROGRAM STUDI TEKNIK TELEKOMUNIKASI JURUSAN TEKNIK ELEKTRO
POLITEKNIK NEGERI UJUNG PANDANG MAKASSAR
LEMBAR PENGESAHAN
Laporan Latihan Proyek Awal ini dengan judul “KONTROL LAMPU OTOMATIS BERBASIS MIKROKONTROLER” oleh :
Muhammad Ismail Basir (06 36 026)
Chairil Anam RH (06 36 047)
Telah diterima dan disahkan sebagai syarat kelulusan Mata Kuliah Latihan Proyek Akhir (LPA) pada Program Studi Teknik Telekomunikasi Jurusan Teknik Elektro Politeknik Negeri Ujung Pandang.
Makassar, 23 Maret 2009
Disahkan oleh :
Pembimbing I
Ir. Daniel Kambuno, MT. NIP : 131 835 728 Pembimbing II Umar Katu, S.T. M.T NIP : 132 327 135 Mengetahui,
Ketua Program Studi Teknik Elektro Ibrahim Abduh, S.S.T.,M.T NIP : 132 062 372 Ketua Jurusan Teknik Elektro
Ir. Hafsah Nirwana, MT NIP : 131 884 836
LEMBAR PENGESAHAN PENGUJI
Judul Latihan Proyek Akhir
”KONTROL LAMPU OTOMATIS BERBASIS MIKROKONTROLER”
Laporan Latihan Proyek Akhir ini telah diterima dan disahkan sebagai syarat kelulusan Mata Kuliah Latihan Proyek Akhir (LPA) pada Program Studi Teknik Telekomunikasi Jurusan Teknik Elektro Politeknik Negeri Ujung Pandang.
Makassar, Maret 2009
Disahkan oleh :
Tim Penguji Ujian Sidang LPA
Ketua Ibrahim Abduh, S.S.T.,M.T NIP. 132 062 372 Sekretaris Usman Bauna, S.S.T. NIP. 132 129 452 Anggota, Yuniarti, S.S.T. NIP. 132 299 468
KATA PENGANTAR
Segala puji dan syukur hanya bagi Allah SWT atas limpahan rahmat dan hidayah-Nya sehingga sehingga penulis dapat merampungkan Laporan Latihan Proyek Awal (LPA) ini. Latihan Proyek Awal ini di susun guna memenuhi persyaratan untuk melanjutkan ke semester VI.
Dalam penyelesaian laporan Latihan Proyek Awal ini penulis mengalami banyak tantangan dan hambatan, namun berkat dukungan dan kerja sama yang baik dengan berbagai pihak, hal-hal tersebut dapat teratasi.
Penulisan laporan LPA ini tidak akan terwujud tanpa bantuan dan dukungan dari berbagai pihak. Oleh karena itu melalui kesempatan ini, kami menyampaikan penghargaan dan terima kasih yang sebesar – besarnya kepada :
1. Ibu Ir. Hafsah Nirwana, MT selaku Ketua Jurusan Teknik Elektro Politeknik Negeri Ujung Pandang.
2. Bapak Ibrahim Abduh, S.S.T.,M.T selaku Ketua Program Studi Teknik Telekomunikasi .
3. Bapak Ir. Daniel Kambuno, MT. selaku Pembimbing I dan Bapak Umar Katu, S.T. M.T selaku Pembimbing II yang senantiasa memberikan bimbingan dan arahannya selama pembuatan LPA hingga penyusunan laporan ini selesai. 4. Kedua Orangtua, saudara (i) penulis yang senantiasa mendukung dan
memberikan dorongan kepada penulis baik secara moril maupun material selama penyelesaian Latihan Proyek Awal ini.
5. Seluruh dosen, staf dan instruktur pada Jurusan Teknik Elektro, khususnya Program Studi Teknik Telekomunikasi.
6. Segenap teknisi Laboratorium dan Bengkel Program Studi Teknik Telekomunikasi Politeknik Ujung Pandang.
7. Spesial thank’s kepada Bang Udin, dan rekan-rekan seperjuangan teknik Elektro angkatan 2006 kalian adalah semangat & motivasiku, yang tanpa henti-hentinya memberikan bantuan dan dukungannya selama penulis membuat Latihan Proyek Awal ini.
8. Rekan-rekan mahasiswa, khususnya Kelas IIIB TC 06 yang telah memberikan bantuan dan dukungannya, selama penulis membuat Latihan Proyek Awal ini. Luv U ALL my Friends...
9. Semua pihak yang telah membantu penulis baik secara langsung maupun tidak langsung.
Penulis menyadari bahwa laporan LPA ini masih jauh dari sempurna. Oleh karena itu kritik dan saran yang bersifat membangun sangat penulis harapkan demi kesempurnaan LPA ini. Demikian laporan LPA ini kami buat dengan harapan semoga laporan ini dapat memberikan manfaat bagi pengembangan ilmu pengetahuan pada umumnya dan bidang komunikasi pada khususnya.
Makassar, Maret 2009
DAFTAR ISI Halaman Halaman judul ... Lembar pengesahan ... ii Kata pengantar ... iv Daftar Isi ... vi
Daftar Gambar ... viii
Daftar Tabel ... ix
Abstrak ... x
BAB I PENDAHULUAN 1.1 Latar Belakang ... 1
1.2 Rumusan Masalah ... 3
1.3 Tujuan dan Manfaat ... 3
1.4 Batasan Masalah ... 3
1.5 Sistematika Penulisan ... 3
BAB II TINJAUAN PUSTAKA 2.1 Ide Dasar ... 5
2.2 Light Amplification by Stimulated Emission of Radiation (LASER) 5
2.3 Comparator ... 6
2.3.1 Light Detector Resistor (LDR) ... 6
2.3.2 Potensiometer ... 7 2.3.3 IC LM 324 N ... 7 2.4 IC PIC16F84A ... 9 2.4.1 Osilator Kristal ... 12 2.4.2 Kapasitor ... 13 2.5 Driver ... 14 2.5.1 Transistor ... 14 2.5.2 Relay ... 15
BAB III PERANCANGAN DAN PEMBUATAN ALAT
3.1 Tujuan Perancangan ... 17
3.2 Diagram Blok Sistem ... 17
3.3 Langkah-Langkah Perancangan ... 17
3.3.1 Pengetesan Rangkaian Pada Electronic Workbenk ... 18
3.3.2 Pembuatan Papan Rangkaian Tercetak pada PCB ... 18
3.3.3 Perakitan Alat ... 20
3.3.4 Pembuatan Kotal Alat ... 20
3.4 Alasan Pemilihan Komponen ... 20
3.5 Hasil Perancangan ... 21
3.5.1 Perancangan Rangkaian Komparator ... 21
3.5.2 Perancangan Rangkaian Kontrol Lampu menggunakan PIC 16F84A 23
3.6 Cara Kerja Rangkaian ... 23
3.7 Flow Chart ... 26
3.8 Cara Pengoperasian Alat ... 27
BAB IV PENGUKURAN DAN ANALISA 4.1 Tujuan Pengukuran ... 28
4.2 Alat Yang Digunakan ... 28
4.3 Spesifikasi Alat ... 28
4.4 Pengukuran Pada Sensor Penerima Cahaya ... 28
4.4.1 Data Hasil Pengukuran ... 28
4.4.2 Analisa Hasil Pengukuran ... 29
BAB V PENUTUP 5.1 Kesimpulan ... 32
5.2 Saran ... 32
DAFTAR PUSTAKA ... 20
DAFTAR GAMBAR
Gambar 2.1 Diagram blok sistem kontrol lampu ... 5
Gambar 2.2 Simbol LDR ... 6
Gambar 2.3. Grafik tegangan-tegangan pada komparator terhadap waktu ... 8
Gambar 2.4 Garfik tegangan saat kaki input komparator dibalik ... 8
Gambar 2.5 PIC16F84A ... 11
Gambar 2.6. Konfigurasi Kristal ... 13
Gambar 2.7 a. Rangkaian RC Pengisian kapasitor ... 13
Gambar 2.7 b. Rangkaian RC Pengosongan kapasitor ... 13
Gambar 2.8 a. Transistor NPN ... 14
Gambar 2.8 b. Transistor PNP ... 14
Gambar 2.9 Rangkaian dalam relay ... 15
Gambar 3.1 Diagram blok sistem ... 17
Gambar 3.2 Rangkaian pengetesan pada software Electronic Workbenk ... 18
Gambar 3.3 Layout komponen Rx ... 19
Gambar 3.4 Perancangan rangkaian komparator ... 21
Gambar 3.5 Perancangan rangkaian kontrol lampu menggunakan PIC16F84 ... 22
Gambar 3.6 Flow Chart Rangkaian ... 23
Gambar 3.7 Perancangan rangkaian Driver ... 24
Gambar 3.8 Rangkaian Kontrol Lampu Otomatis Berbasis Mikrokontroler ... 24
Gambar 4.1 Cahaya dari LASER bebas mengenai LDR ... 22
DAFTAR TABEL
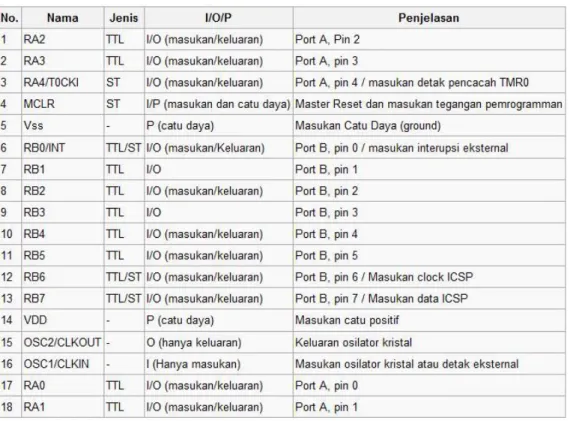
Halaman Tabel 2.1. Pemetaan Pin Pada PIC16F84A ... 12
RINGKASAN
Latihan Proyek Awal ini dibuat untuk mengaplikasikan teori mengenai mikrokontroler yang dapat mengendalikan lampu dengan memanfaatkan cahaya sebagai sumber isyarat. Adapun rangkaian yang digunakan terdiri dari 5 blok diagram, yaitu LASER sebagai sumber isyarat berupa cahaya, komparator sebagai rangkaian pembanding tegangan, PIC16F84A sebagai mikrokontroler, driver sebagai saklar otomatis lampu serta lampu sebagai alat yang dikontrol. Alat ini dicatu dengan tegangan sebesar 9 volt untuk supply komparator dan PIC16F84A serta 12V untuk supply relay pada driver dan tegangan bolak-balik untuk supply lampu. Ketika cahaya LASER pertama pada pintu masuk yang dipancarkan secara kontinyu terhadap detektor cahaya terhalangi, maka lampu akan menyala dan ketika cahaya LASER kedua pada pintu keluar yang dipancarkan secara kontinyu terhadap detektor cahaya terhalangi, maka lampu akan kembali padam.
BAB I PENDAHULUAN 1.1 Latar Belakang
Perkembangan teknologi dan informasi yang semakin mendukung tingkat kenyaman dan efisiensi dalam melakukan aktivitas yang menuntut kita untuk selalu berkembang dan menciptakan sesuatu yang praktis dan efektif, maka penulis terinspirasi untuk merancang sebuah alat pengendali lampu secara otomatis tanpa harus menekan saklar lampu, dengan memanfaatkan sistem mikrokontoler sebagai otak pengendali lampu secara otomatis. Programmable
Integrated Control (PIC) adalah sebuah mikrokontroler yang dapat melakukan
pengaturan berdasarkan program yang diinputkan padanya. Dengan menanamkan program pada PIC, maka dapat melakukan perintah pengendalian pada alat yang kita inginkan. Alat yang akan dikontrol pada kasus ini adalah lampu pada suatu ruangan atau tempat tertentu, tanpa harus menekan saklar jika ingin menyalakan atau mematikan lampu tersebut. Dengan sistem seperti ini juga merupakan bentuk implementasi penghematan listrik mengingat pasokan listrik yang semakin menipis.
Alat pengendali ini terdiri atas rangkaian komparator, rangkaian mikrokontroler menggunakan PIC16F84A dan rangkaian driver. Komparator berfungsi untuk mendeteksi cahaya sebagai sumber isyarat. Mikrokontroller mengolah data dari komparator yang nantinya akan diteruskan ke driver untuk menyalakan lampu.
Secara umum prinsip kerja dari rangkaian kontrol lampu otomatis berbasis mikrokontroler ini adalah memanfaatkan cahaya sebagai sumber isyarat,
dan mikrokontroler sebagai otak pengendali lampu. Sumber cahaya dalam rancangan ini menggunakan Light Amplification by Stimulated Emission of
Radiation (LASER), karena sinar ini mempunyai jarak sinar yang fokus dengan
jangkauan yang jauh sehingga kita dapat memfokuskan sinar LASER ini tepat pada base LDR yang terlalu presisi. Cahaya dari LASER yang ditembakkan langsung ke LDR diterjemahkan sebagai isyarat bahwa ketika cahaya LASER tersebut terhalang oleh sesuatu maka rangkaian penerima akan mengubah sinar LASER menjadi sinyal-sinyal listrik dan seterusnya akan dilewatkan pada rangkaian komparator. Rangkaian komparator ini akan dihubungkan dengan mikrokontroler PIC16F84A yang telah ditanamkan program untuk menyalakan atau mematikan lampu secara otomatis dengan dibantu oleh rangkaian driver dalam hal ini menggunakan relay sebagai saklar otomatisnya.
Oleh karena itu, pada Latihan Proyek Awal (LPA) ini, penulis akan menerapkan ilmu pengetahuan yang penulis dapat di bangku kuliah untuk membuat suatu alat pengontrol otomatis dengan cahaya sebagai sumber isyarat dan mikrokontroler sebagai otak pengendalinya. Alat ini diberi nama “Kontrol Lampu Otomatis Berbasis Mikrokontroler” yang juga merupakan judul dari latihan proyek awal ini, dengan alat ini kita bisa lebih nyaman dalam melakukan aktivitas karena tanpa harus menekan saklar untuk menyalakan atau mematikan lampu dan juga menghemat listrik karena penggunaan daya secara efektif dan efisien sesuai dengan keperluan.
1.2 Rumusan Masalah
Berdasarkan latar belakang, maka yang menjadi rumusan masalah pada pembuatan alat kontrol lampu otomatis ini adalah sebagai berikut :
1. Bagaimana merancang alat kontrol lampu otomatis dengan cahaya sebagai sumber isyarat dan mikrokontroler sebagai otak pengendalinya?
2. Bagaimana membuat program pengendali lampu yang dapat menyalakan dan mematikan lampu secara otomatis berbasis mikrokontroler PIC16F84A.
1.3 Tujuan dan Manfaat
Tujuan yang akan dicapai dalam latihan proyek awal ini adalah merancang alat kontrol lampu otomatis dengan cahaya sebagai sumber isyarat dan mikrokontroler sebagai otak pengendalinya tanpa harus menekan saklar untuk menyalakan atau mematikan lampu sehingga dengan sistem tersebut akan lebih menghemat penggunaan listrik yang biasanya tidak dimanfaatkan seperlunya.
1.4 Batasan Masalah
Dalam penulisan proposal latihan proyek awal ini yaitu : “KONTROL
LAMPU OTOMATIS BERBASIS MIKROKONTROLER”, penulis
menitikberatkan pada perancangan alat pengendali lampu dengan cahaya sebagai sumber isyarat dan pemrograman pada PIC16F84A sebagai sistem kontrolnya.
1.5 Sistematika Penulisan
Agar memudahkan dalam penyusunan dan pemahaman mengenai isi dari latihan proyek awal dengan judul KONTROL LAMPU OTOMATIS BERBASIS
MIKROKONTROLER ini, maka penulis menguraikan secara garis besar mengenai masalah yang akan dibahas. Penulisan latihan proyek awal ini terdiri dari 5 bab, yaitu :
BAB I PENDAHULUAN
Berisi tentang Latar Belakang, Rumusan Masalah, Tujuan Penulisan, Batasan Masalah dan Sistematika Penulisan.
BAB II TINJAUAN PUSTAKA
Bab ini berisi tentang teori-teori dasar yang menunjang dalam pengerjaan proyek awal, yaitu mencakup tentang rangkaian penunjang dan komponen yang digunakan dalam pembuatan alat.
BAB III METODE PERANCANGAN
Merupakan inti dari Latihan Proyek Awal (LPA) ini, yang berisi pembahasan yang berkaitan dengan perancangan subjek laporan Latihan Proyek Awal ini, diagram blok rangkaian secara keseluruhan dan realisasi rangkaian beserta cara kerjanya.
BAB IV PENGUKURAN DAN ANALISA
Berisi tentang : Tujuan Pengukuran, Alat yang Digunakan, Prosedur Pengukuran, Hasil Pengukuran dan Analisa.
BAB V PENUTUP
Pada bab terakhir ini dipaparkan mengenai kesimpulan dan saran untuk pengembangan lebih lanjut.
BAB II
TINJAUAN PUSTAKA 2.1 Ide Dasar
Permasalahan yang akan diulas pada latihan proyek awal ini adalah sistem kontrol lampu secara otomatis dimana sumber isyaratnya berupa cahaya ketika cahaya yang masuk pada rangkaian penerima terhalangi atau tidak. Sehingga dengan demikian cahaya disini dapat dikatakan berfungsi sebagai isyarat.
Isyarat yang diberikan pada sistem merupakan pemicu bagi rangkaian untuk menghasilkan suatu keadaan sebagai identifikasi ada tidaknya sumber isyarat sebagai masukan yang dapat diamati pada LED dan lampu sebagai perangkat yang dikontrol.
Keseluruhan konsep dasar ini terlihat pada blok yang ada pada gambar 2.1 berikut ini :
Gambar 2.1 Blok diagram kontrol lampu
2.2 Light Amplification by Stimulated Emission of Radiation (LASER)
Sumber cahaya dalam rancangan ini menggunakan sinar LASER, karena sinar ini mempunyai jarak sinar yang terfokus, cahaya tidak terhambur dengan jangkauan yang jauh sehingga kita dapat memfokuskan sinar LASER ini tepat pada base LDR yang terlalu presisi.
PIC16F84A
2.3 Light Detector Resistor (LDR)
LDR adalah suatu komponen yang mempunyai perubahan resistansi yang besarnya tergantung pada cahaya. Simbol LDR ini dapat dilihat pada gambar 2.2 berikut.
Gambar 2.2 Simbol LDR
Ketika sebuah LDR dibawa dari sebuah ruangan dengan sinyal kekuatan cahaya tertentu ke dalam suatu ruangan yang gelap sekali, jika kita amati bahwa nilai resistansi dari LDR tidak akan segera berubah resistansinya pada keadaan gelap tersebut, tetapi LDR ini hanya akan bisa mencapai harga di kegelapan setelah mengalami selang waktu tertentu. Harga ini ditulis dalam dalam kOhm/detik (selama 20 menit pertama mulai dari level cahaya 1000 lux) kecepatan ini akan lebih tinggi pada arah sebaliknya, yaitu pergi dari tempat gelap ke tempat terang sekitar 300 lux, hanya menghabiskan waktu kurang dari 10 mili detik untuk mencapai nilai resistansi yang sesuai dengan level cahaya 400 lux.
LDR tidak mempunyai sensitifitas yang sama untuk setiap panjang gelombang yang jatuh padanya. Keterangan ini diberikan oleh setiap pabrik yang membuatnya dalam bentuk karakteristik respon spektral.
2.4 Potensiometer
Jenis-jenis potensiometer yang dikenal yaitu: Potensiometer lilitan tunggal
Potensiometer lilitan ganda, terdiri dari unsur karbon yang banyak dipakai sebagai pengatur volume, bas, tribel dalam penguat, pengatur cerah dan kontras dalam penerima TV. Potensiometer ini dapat diperoleh dengan harga antara 50Ω hingga 5MΩ dengan toleransi 10% hingga 20%, dengan tarif daya 2 dan 3 watt.
Potensiometer lilitan kawat, terbuat dari lilitan kawat pada kartu dari plastik, fenolik, atau bahan lain. Potensiometer ini mampu dioperasikan dalam suhu setinggi 150oC, dengan tarif daya tinggi.
Trimput, memiliki harga hingga 5 MΩ dengan toleransi 10%, dan daya 1 watt. Trimput pada rangkaian berfungsi untuk mengatur sensitifitas komparator agar peka terhadap perubahan cahaya.
2.5 IC LM 324 N
IC LM 324 merupakan sebuah komparator yang bekerja dengan arus yang rendah. IC ini juga didesain dengan tegangan kerja yang beragam, dari standar 15 V dapat dubah ke 5 V saat dioperasikan dalam rangkaian logika, sehingga
outputnya bisa dihubungkan dengan RTL, DTL, TTL ataupun CMOS. Tegangan
referensi (Vref) dari komparator ditentukan oleh tegangan potensiometer geser. Sedangkan tegangan input (Vin) komparator diperoleh dari bagi tegangan sumber (5 V) antara LDR dengan R2.
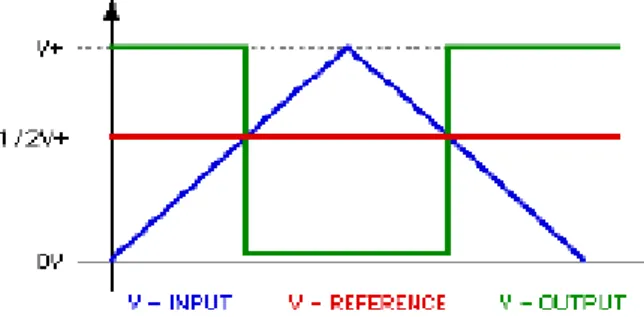
Gambar 2.3 menunjukkan diagram input-ouput terhadap wakttu dari komparator. Saat Vinput < V referensi, output akan sama dengan Vsumber (+) dan saat Vinput > Vreferensi output akan sama dengan 0V.
Gambar 2.3 Grafik tegangan-tegangan pada komparator terhadap waktu
Saat kedua kaki input dibalik maka output karakteristik dari komparator pun akan ikut membalik, seperti ditunjukan oleh gambar berikut ini.
Gambar 2.4 Garfik tegangan saat kaki input komparator dibalik
Jelas bahwa masukan dari komparator dibandingkan dengan suatu nilai acuan tertentu (Vrefferensi dan keluaran di digitalkan menurut dua nilai kemungkinan yaitu: nilai “0” saat Voutput low dan “1” saat Voutput high. Dengan kata lain komparator bertindak sebagai pengubah analog ke digital 1 bit. Tegangan dengan logika “0” atau “1” ini, tentu saja dapat dipertukarkan dengan rangkaian digital seperti IC TTL, ECL ataupun CMOS.
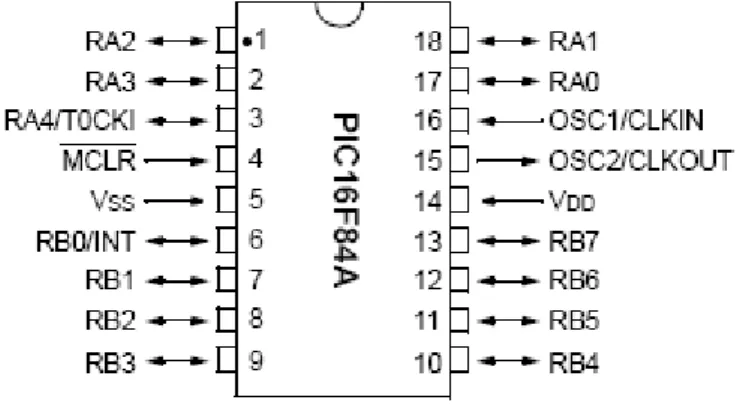
2.6 PIC16F84A
PIC16F84A adalah mikrokontroler keluarga mid-range yang dikeluarkan oleh Microchip Corporation. PIC16F84A dibangun dengan arsitektur RISC atau dikenal juga sebagai Arsitektur Harvard. PIC16F84A memiliki 35 buah set instruksi sehingga mudah dipelajari bagi pemula. Semua instruksi PIC16F84A menggunakan satu siklus operasi, kecuali instruksi percabangan. Satu siklus instruksi terdiri dari 4 siklus kristal, artinya PIC16F84A dapat mencapai kecepatan 1 MIPS (Million Instruction per Second) hanya dengan menggunakan kristal 4 MHz. PIC16F84A dapat dipacu hingga frekwensi kerja 20 MHz dan tegangan kerjanya bervariasi dari 2,0 Volt hingga 5,5 Volt. PIC16F84A hadir dalam kemasan 18 pin PDIP (Plastic Dual In Line Package), 18 pin SOIC (Small Outline
Integrated Circuit) dan 20 pin SSOP (Shrink Small Outline). PIC16F84A dapat
dapat diprogram dengan mudah melalui ICSP™ (In-Circuit Serial
Programming™) tanpa harus membuat rangkaian programmer yang rumit dan
mahal.
PIC16F84A memiliki memori program sebesar 1024 word, RAM sebesar 68 byte dan EEPROM sebesar 64 byte. Setiap word memori program lebarnya 14 bit, digunakan untuk menyimpan opcode dan operand sedangkan setiap byte RAM dan EEPROM lebarnya 8 bit. Perbedaan ukuran RAM dan memori program disebabkan oleh Arsitektur Harvard yang memisahkan memori program dan memori data, hal ini meningkatkan efisiensi memori program. Memori program PIC16F84A berjenis memori flash, secara teoritis dapat dihapus dan diprogram ulang hingga 10 ribu kali dan EEPROM nya dapat dihapus dan ditulis ulang
hingga 10 juta kali. Hal ini membuat PIC16F84A cocok untuk penelitian, pengembangan program maupun aplikasi terapan.
RAM PIC16F84A terbagi menjadi 2 bagian yaitu Special Function
Register (SFR) dan General Purpose Register (GPR). GPR dapat digunakan
secara bebas untuk keperluan umum dan dapat dialamatkan secara langsung (direct addressing) ataupun tidak langsung (indirect addressing). PIC16F84A memiliki 15 buah SFR dengan fungsi spesifik seperti konfigurasi port, flag dan sebagainya.
Sebagaimana umumnya mikrokontroler, PIC16F84A pun menangani interupsi, tepatnya dari pin RB0/INT, overflow pencacah TMR0, perubahan pada PORTB pin 7 hingga pin 4 dan indikator selesainya penulisan EEPROM. PIC16F84A juga memiliki fitur reset otomatis ketika catu daya dinyalakan, fitur ini lebih dikenal dengan sebutan Power on Reset (POR). Fitur lainnya adalah
Power-up Timer (PWRT), Oscillator Start-up Timer (OST) dan Watchdog Timer
(WDT), pengamanan kode program, penghematan daya (modus SLEEP).
Dari sisi perangkat, PIC16F84A dilengkapi 13 buah pin masukan/keluaran (I/O) yang dapat dikendalikan secara individual. Setiap pin tersebut mampu menyuplai dan menyerap arus hingga 25 mA, sehingga dapat digunakan secara langsung untuk mengendalikan LED. Selain itu PIC16F84A dilengkapi pencacah 8 bit yang tersambung dengan preskalar untuk membagi frekuensi masukan pencacah dengan faktor tertentu.
Ringkasan Fitur:
Memori program 1024 byte, masing masing selebar 14 bit. 68 byte RAM, masing-masing selebar 8 bit.
64 byte EEPROM, masing-masing selebar 8 bit. 15 buah register fungsi khusus (SFR)
Stack 8 tingkat.
Interupsi Eksternal
13 buah pin I/O yang dapat dikendalikan secara individual. Pencacah 8 bit.
Watchdog Timer.
Proteksi Kode
Modus penghematan daya.
Tabel 2.1. Pemetaan Pin Pada PIC16F84A
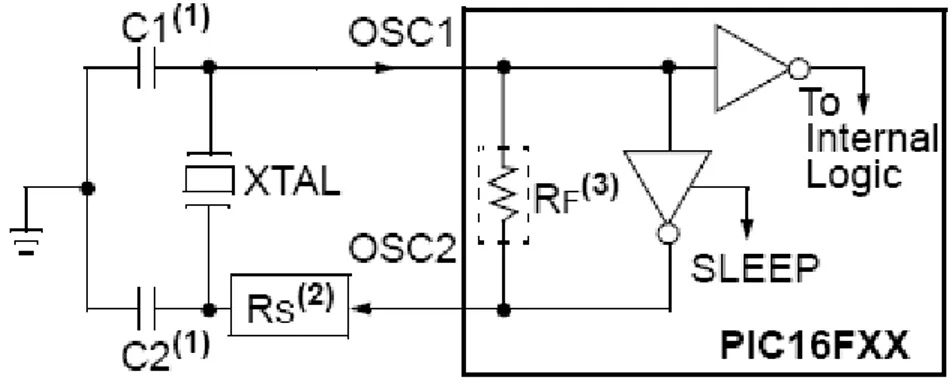
2.7 Osilator Kristal
Pada mikrokontroler PIC16F84A tersedia tiga pilihan osilator yang berbeda dapat digunakan yaitu: Osilator Kristal, Osilator RC, atau Osilator Eksternal, namun yang digunakan adalah konfigurasi rangkaian osilator Kristal. Pada osilator Kristal dapat dipilih osilator Kristal Standard (XT), High Speed
(HS), Low Speed (LS). Osilator ini dibentuk dengan menggunakan kristal atau resonator keramik yang dihubungkan ke pin OSC1 dan OSC2 yang membentuk osilasi. Konfigurasi dari rangkaian osilator dapat dilihat pada gambar dibawah ini.
Gambar 2.6. Konfigurasi Kristal
2.8 Kapasitor
Kemampuan untuk menyimpan muatan disebut kapasitans (C). Semakin besar kapasitansi dari kapasitor, makin banyak muatan yang dapat disimpannya. Kapasitas dapat diukur dalam farad (F). Farad adalah satuan kapasitas besar.
Rangkaian RC merupakan rangkaian yang terdiri dari tahanan dan kapasitor yang dihubung seri sehingga pada saat ada tegangan yang dialirkan maka kapasitor akan mengisi muatan dan setelah mencapai maksimum dari kapasitor maka muatan akan dibuang melalui tahanan (pengosongan muatan kapasitor). Rangkaian RC dapat dilihat pada gambar 2.4 di bawah ini.
(a) (b)
Gambar 2.7 Rangkaian RC (a) Pengisian kapasitor. (b) Pengosongan kapasitor. Pada saat pengisian kapasitor saklar pada posisi I seperti terlihat pada gambar 2.7(a) di atas, sedangkan setelah pengisian kapasitor mencapai
maksimum, posisi saklar dipindahkan ke posisi 2 seperti terlihat pada garnbar 2.7(b) sumber tegangan terputus dan pengosongan muatan terjadi melalui tahanan. Waktu untuk pengisian muatan kapasitor sama dengan waktu untuk pengosongan muatan kapasitor. Besarnya tegangan untuk mengisi muatan kapasitor sama dengan besarnya tegangan yang dibuang (pengosongan muatan kapasitor).
2.9 Transistor
Transistor adalah komponen elektronika yang mempunyai tiga buah terminal. Terminal itu disebut emitor, basis, kolektor. Transistor seakan-akan dibentuk dari penggabungan dua buah dioda. Dioda satu dengan yang lain saling digabungkan dengan cara menyambungkan salah satu sisi dioda yang senama. Dengan cara penggabungan seperti ini diperoleh dua buah dioda sehingga menghasilkan transistor NPN. Gambar 2.4 dibawah memperlihatkan penggabungan dua dioda sehingga menghasilkan transistor NPN dan transistor PNP.
(a) (b)
Gambar 2.8 Transistor, (a) Transistor NPN (b) Transistor PNP Keterangan :
C = kolektor B = Basis E = Emitor
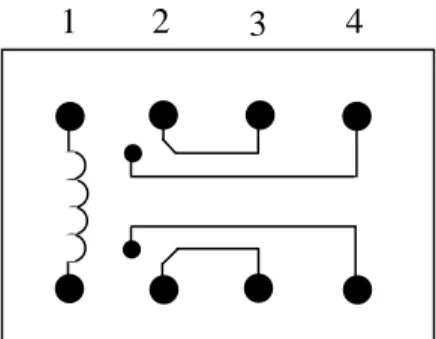
2.10 Relay
Relay adalah suatu komponen yang bekerja secara magnetik apabila diberikan tegangan. Fungsi dari relay adalah untuk memutuskan dan menghubungkan rangkaian kontrol. Relay terdiri dari 2 (dua) kontak yaitu kontak
normal open dan kontak normally close.
Gambar 2.9 Rangkaian dalam relay Keterangan :
1. Kaki kumparan 2. Common 3. Normally open 4. Normally close
Jika gulungan kumparan dialiri listrik, pada inti timbul garis gaya yang juga melalui armature dan badan relay, maka inti menjadi magnet. Medan inilah yang akan menarik saklar metal ke arahnya dan akan menyentuh bagian saklar yang lain. Akibat dari mekanisme ini adalah rangkaian yang sebelumnya rangkaian terbuka menjadi rangkaian tertutup. Sifat relay yang seperti ini (menjadi rangkaian tertutup setelah diberikan tegangan) disebut dengan normally open.
.
.
Dengan demikian, normally closed relay adalah relay yang akan menjadi rangkaian terbuka setelah diberikan tegangan.
Relay digunakan agar keadaan satu sumber (terbuka atau tertutup) energi dapat mengatur keadaan sumber energi (terbuka atau tertutup) lainnya yang biasanya memiliki arus yang lebih besar dan kedua sumber energi ini saling terisolasi satu sama lain (tidak terhubung secara langsung).
BAB III
PERANCANGAN DAN PEMBUATAN ALAT
3.1 Tujuan Perancangan
Tujuan perancangan pada Latihan Proyek Awal ini adalah untuk merancang dan mengembangkan suatu alat yang dapat mengontrol lampu secara otomatis tanpa harus menekan saklar dengan mempertimbangkan efisiensi dan estetika sehingga memberikan fungsi yang maksimal dan dapat diaplikasikan dalam aktivitas sehari-hari.
3.2 Diagram Blok Sistem
Gambar 3.1 Diagram blok sistem
3.3 Langkah-Langkah Perancangan
Langkah-langkah perancangan dari Latihan Proyek Awal ini terdiri dari : 1. Perancangan & pengetesan rangkaian pada software pendukung (Elektronik
workbench)
2. Pembuatan papan rangkaian tercetak pada PCB 3. Perakitan alat
4. Pembuatan kotak alat
PIC16F84A
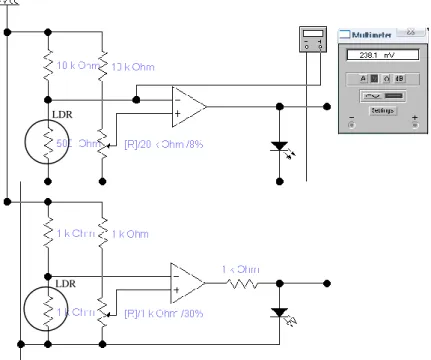
3.3.1 Pengetesan Rangkaian pada software Electronik Workbench
Pengetesan rangkaian pada tahap ini dilakukan untuk mengetahui kinerja alat, sebelum dipindahkan pada Printed Circuit Board (PCB). Berikut gambar pengetesan pada Electronic Workbench.
Gambar 3.2 Rangkaian pengetesan pada software Electronic Workbench
3.3.2 Pembuatan Papan Rangkaian Tercetak pada PCB
Dasar pembuatan rangkaian tercetak pada dasarnya adalah memindahkan gambar rangkaian ke dalam papan PCB dengan menghubungkan tiap-tipa kaki komponen dengan lapisan tembaga sebagai pengganti kabel. Hal-hal yang perlu diperhatikan dalam pembuatan rangkaian tercetak adalah :
- Membuat jalur rangkaian sesederhana mungkin.
- Mengusahakan agar jalur antar komponen tidak terlalu dekat.
LDR
a. Pada pemancar (Tx)
Pada pemancar ini tidak terdapat layout karena rangkaian ini hanya dirangkaikan dengan LASER. sehingga dapat menjadi pemancar yang dapat memancarkan cahaya dari LASER.
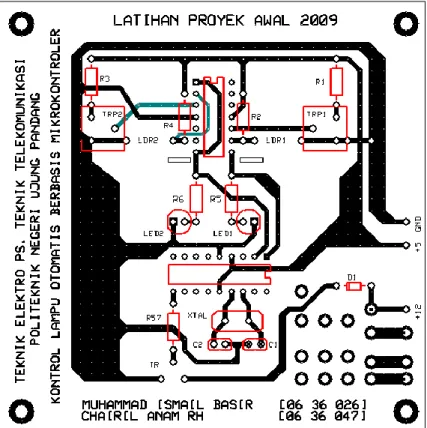
b. Pada Penerima (Rx)
Pada penerima ini terdapat rangkaian yang dapat mendeteksi sinar LASER sebagai fungsi sumber isyarat.
Gambar 3.3 Layout komponen Rx
Proses pembuatan lay-out pada PCB adalah sebagai berikut :
a) Pengaturan tata letak komponen dan jalur pada software pendukung b) Pencetakan hasil layout rangkaian pada papan PCB
3.3.3 Perakitan Alat
Proses perakitan terdiri dari tahap-tahap berikut : a. Pengeboran papan PCB
b. Pembersihan dan pengecekan jalur-jalur layout c. Pemasangan komponen dan penyolderan pada PCB d. Pengawatan
3.3.4 Pembuatan Kotak Alat
Langkah-langkah pembuatan kotak alat sebagai berikut : a. Pengukuran fiber glass sesuai dengan ukuran perangkat b. Pemotongan fiber glass sesuai dengan ukuranya
c. Penyambuangan fiber glass sehingga berbentuk kotak d. Penghalusan Fiber glass
3.4 Alasan Pemilihan Komponen
Secara umum pemilihan komponen dilakukan untuk memperoleh kualitas yang tinggi dan dapat menghasilkan atau menampilkan fungsi sebagaimana diharapkan. Pemilihan komponen dilakukan sesuai dengan spesifikasi alat yang dapat dilihat pada lampiran. Disamping itu juga komponen yang digunakan banyak tersedia sehingga memudahkan dalam perbaikannya jika terjadi kerusakan, serta pada intinya pembuatan latihan proyek awal ini menjadi lancar.
3.5 Hasil Perancangan
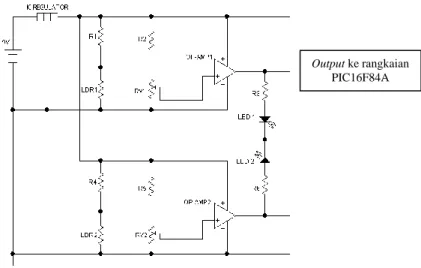
3.5.1 Perancangan Rangkaian Komparator
Pada rangkaian komparator terdapat sebuah detektor yang berfungsi untuk mendeteksi sumber isyarat berupa cahaya. Detektor ini adalah sebuah LDR yang dipasang berhadapan terhadap pancaran cahaya yang dipancarkan LASER secara kontinyu.
Gambar 3.4 Perancangan rangkaian komparator
Komparator merupakan rangkaian elektronik yang akan membandingkan suatu input dengan referensi tertentu untuk menghasilkan output berupa dua nilai (high dan low). Suatu komparator mempunyai dua masukan yang terdiri dari tegangan acuan (Vreference) dan tegangan masukan (Vinput) serta satu tegangan ouput (Voutput).
Dalam operasinya komparator akan mempunyai sebuah keluaran konstan yang bernilai “high” saat Vin lebih besar dari Vrefferensi dan “low” saat Vin lebih kecil dari Vrefferensi atau sebaliknya. Nilai low dan high tersebut akan ditentukan
Output ke rangkaian
oleh desain dari komparator itu sendiri. Keadaan output ini disebut sebagai karakteristik output komparator.
Pada rancangan rangkaian komparator ini menggunakan rangkaian terintegrasi (IC LM324) yang bertindak sebagai komparator terhadap perubahan resistansi pada LDR jika terkena cahaya, maka resistansinya akan berkurang sehingga output komparator akan high sebaliknya jika tidak terkena cahaya maka
output komparator akan low.
3.5.2 Perancangan Rangkaian Kontrol Lampu menggunakan PIC16F84A
Gambar 3.5 Perancangan rangkaian Kontrol Lampu menggunakan PIC16F84A PIC16F84A adalah pengontrol lampu otomatis yang outputnya tergantung dari inputnya. Mikrokontroler ini menggunakan prinsip aktif low, maksudnya data yang diolah adalah data low. data ini akan diolah oleh mikrokontroler agar
outputnya menjadi high atau logika 1.
Output dari Komparator
Adapun flow chart program mikrokontroler ini adalah sebagai berikut :
Gambar 3.6 Flow Chart Rangkaian
Tidak Tidak Y a a Y a a ≠0 =0 Y a a Tidak Tidak SELESAI CEK INPUT 1 CEK INPUT 2 Tambahkan nilai register dengan 1 Keluarkan logika High pada Port B
Kurangkan nilai register dengan 1
Keluarkan logika
Low pada Port B
MULAI INISIALISASI I/O CEK SENSOR 1 CEK SENSOR 2
3.5.3 Perancangan Rangkaian Driver
Gambar 3.7 Perancangan rangkaian Driver
Ketika transistor mendapatkan bias tegangan pada basisnya, maka kolektor dan emitor terhubung sehingga transistor berfungsi menjadi sebuah saklar yang menghubungkan relay dengan ground. Hal ini mengakibatkan lampu terhubung dengan tegangan AC.
3.6 Cara Kerja Rangkaian
Sensor pertama (LASER1) dan LDR1 berfungsi sebagai pendeteksi saat seseorang melewati pintu masuk. Sensor berfungsi untuk memancarkan cahaya sedangkan LDR berfungsi untuk menerima cahaya tersebut. Kedua bagian ini dipasang berhadapan agar pancaran cahaya yang dipancarkan LASER secara konitnyu sehingga dapat diterima pada LDR. Pancaran cahaya dari sensor1 akan ditanggapi oleh LDR1. Saat cahaya mengenai LDR maka keluaran pada komparator1 akan berubah pada keadaan tinggi. Dalam artian Vin lebih besar dari Vrefferensi maka keluarannya akan bernilai “high”. Ketika seseorang melewati pintu maka pancaran cahaya dari pemancar akan terhalang sehingga LDR tidak mendapat pancaran cahaya (off). Dengan kata lain Vin lebih kecil dari Vrefferensi Hal ini akan mengakibatkan keluaran pada komparator1 akan beralih ke keadaan rendah atau bernilai “low”. Sehingga tegangan yang masuk ke rangkaian mikrokontroler sama dengan logika 0, data ini akan diolah oleh mikrokontroler agar outputnya menjadi high atau logika 1. Output dari mikrokontroler ini diteruskan ke transistor yang sebelumnya melewati sebuah resistor agar tegangan yang masuk ke transistor tidak terlalu besar sehingga transistor ini bekerja seperti sebuah saklar karena ketika basis pada transistor mendapat tegangan picu maka kolektor dan emitor terhubung singkat. Dengan demikian relay terhubung dengan ground akibatnya relay menjadi aktif sehingga lampu terhubung dengan tegangan AC.
Ketika pada sensor2 terhalang cahaya dalam artian seseorang melewati pancaran cahaya ke LDR2 yang hal ini mengakibatkan keluaran pada komparator2 akan beralih ke keadaan rendah. Sehingga tegangan yang masuk ke
rangkaian mikrokontroler sama dengan logika 0, data ini akan diolah oleh mikrokontroler agar outputnya menjadi low atau logika 0. Akibatnya transistor tidak bekerja. Dengan demikian relay tidak terhubung dengan ground sehingga relay menjadi tidak aktif yang akan mematikan lampu secara otomatis.
3.7 Cara Pengoperasian Alat
Adapun cara pengoperasian pengendali lampu otomatis ini sebagai berikut:
1. Menghubungkan sistem ke catu daya 5 VDC, 12 VDC dan AC 220V untuk relay.
2. Menekan tombol ON untuk menghidupkan sistem.
3. Memasang LASER sebagai sumber cahaya dan LDR sebagai penerima saling berhadapan pada jarak tertentu.
BAB IV
PENGUKURAN DAN ANALISA
4.1 Tujuan Pengukuran
Tujuan dari pengukuran alat ini adalah :
a. Mengetahui spesifikasi dan cara kerja dari alat yang dibuat.
b. Mengetahui bagian-bagian yang mudah mengalami kerusakan sekaligus pemecahan masalahnya.
4.2 Alat yang digunakan
Alat-alat yang digunakan pada pengukuran ini : a. Multimeter analog.
b. Adaptor 12 volt.
4.3 Spesifikasi Alat
Spesifikasi alat pengendali lampu otomatis ini adalah tegangan catu daya DC sebesar 9v untuk supply komparator dan mikrokontroller, 12v untuk supply relay dan tegangan AC 220 volt untuk supply lampu.
4.4 Pengukuran pada Sensor Penerima Cahaya
Pengukuran dilakukan pada keluaran rangkaian pada dua kondisi yaitu saat LDR menerima cahaya dan saat LDR tidak menerima cahaya.
4.4.1 Data hasil pengukuran
Rangkaian ini dicatu dengan tegangan 9 VDC,12 VDC dan 220 AC dan hasil pengukuran yang diperoleh menunjukkan bahwa tegangan keluar adalah sebesar 3,2 V.
a. Pada saat LDR terkena cahaya
Tegangan Nilai
Output Komparator 1 3,2 Volt
Output Komparator 2 3,2 Volt
Vin1 PIC 3,2 Volt
Vin 2 PIC 3,2 Volt
b. Pada saat LDR tidak terkena cahaya
Tegangan Nilai
Output Komparator 1 0 Volt
Output Komparator 2 0 Volt
Vin 1 PIC 0 Volt
Vin 2 PIC 0 Volt
4.4.2 Analisa hasil pengukuran
Saat LDR terkena cahaya maka hambatan dari LDR menjadi kecil sehingga Vin(non-inverting) menjadi besar dan jika Vin > Vref maka output dari komparator akan menjadi high (+ 3,2 V). Sedangkan saat dalam keadaan gelap hambatan dari LDR menjadi sangat besar sehingga Vin(non-inverting) menjadi kecil, jika tegangan Vin < Vref, maka output komparator akan menjadi low (0 V).
Dengan prinsip kerja ini rangkaian mampu mendeteksi keadaan gelap dan terang dari lingkungan sekitar dengan memberikan output high (+3,2 V) saat keadaan terang dan low ( 0 V) saat keadaan gelap.
Karena kerja dari komparator hanya membandingkan Vin dengan Vref-nya maka dengan mengatur Vin atau Vref, kita sudah mengatur kepekaan sensor terhadap perubahan tingkat intensitas cahaya yang terjadi. Vin tergantung dari pengaturan trimput dan Vref tergantung dari perubahan resistansi dari LDR.
Sesuai dengan rancangan, kami mendesain sebuah sensor yang dapat mendeteksi seseorang yang melewati tempat pendeteksi dipasang. Penjelasan sebagai berikut, ketika tidak ada yang menghalangi atau melewati sensor maka cahaya dari LASER akan bebas ditembakkan langsung menuju LDR sehingga hambatan LDR akan berkurang. Pada kondisi ini komparator akan mengeluarkan tegangan “3,2 Volt” atau sama dengan logika high, seperti pada gambar berikut :
Gambar 4.1 Cahaya dari LASER bebas mengenai LDR
Sebaliknya pada saat terhalang atau dengan orang yang melintas maka orang tersebut bertindak sebagai penghalang seperti pada gambar dibawah. Sehingga intensitas cahaya yang diterima LDR akan berkurang. Hal ini sama saja dengan LDR berada pada tempat gelap. Pada kondisi ini komparator akan mengeluarkan tegangan 0 Volt atau sama dengan logika low.
BAB V PENUTUP
5.1 Kesimpulan
Berdasarkan hasil pengukuran alat ini dapat diambil kesimpulan sebagai berikut :
1. Trimput pada rangkaian berfungsi untuk mengatur sensitifitas komparator agar peka terhadap perubahan intensitas cahaya .
2. Pada alat ini terdiri dari rangkaian komparator sebagai pembanding tegangan, IC PIC16F84A sebagai pengendali lampu dan relay sebagai saklar otomatis.
5.2 Saran
1. Dalam membuat rangkaian Kontrol Lampu Otomatis dengan PIC 16F84A ini harus memperhatikan nilai resistansi yang digunakan serta toleransinya agar diperoleh tegangan output sebagai input pada IC PIC 16F84A.
2. Untuk perangkat yang digunakan sebagai sumber cahaya sebaiknya menggunakan komponen yang memberikan cahaya yang terfokus..
DAFTAR PUSTAKA
______, 1996. PIC16F84, Microchip Technologi Inc. ______, 2008. elka, _______.
http://lionjogja.20m.com/tutorial_pic.html, diakses 2 Maret 2009.
http://id.wikipedia.org/wiki/Transistor, diakses 2 Maret 2009
B. B. Laud. 1998. Laser dan Optik Nonlinear Terjemahan Susanto, Jakarta: Penerbit Universitas Indonesia.
Claton L. Hallmark. 1997. Laser The Light Fantastic, USA: Light Fantastik United States of America.
Hughes W, Frederick. 1994. 36 Panduan OP – AMP, Jakarta: PT Elex Media Komputindo.
DAFTAR KOMPONEN SERTA ALAT DAN BAHAN YANG DIGUNAKAN
1. Resistor 10 kΩ 4 buah 2. Resistor 100 ohm 2 buah 3. Resistor 560 ohm 1 buah 4. Trimpot 20 K 2 buah
5. Kristal 4,433619 MHz 1 buah 6. Kapasitor 15 pF 2 buah 7. Transistor type BC107 1 buah 8. IC LM324N 1 buah
9. IC PIC16F84A 1 buah 10. IC L7805 1 buah
11. Socket IC 14 kaki 1 buah. 12. Socket IC 18 kaki 1 buah. 13. Switch on-off 1 buah 14. LDR 2 buah
15. LED 2 buah 16. Relay 12 VDC 17. Papan PCB 1 buah 18. Konektor Adaptor 1 buah 19. Konektor Baterai 1 buah 20. Baterai 9 V 1 buah 21. Timah 22. Spidol Permanen 23. Kabel / jumper 24. Solder 25. Pengisap Timah 26. Pelarut PCB (FeCl3) 27. Mata Bor
28. Fiber Glass secukupnya 29. Lem Fiber
30. Laser/Pointer 2 buah 31. Dudukan Lampu 1 buah
I II III Jumlah Quantity Nama bagian Port Name No Bagian Port No Bahan Material Ukuran Size Perubahan Revision SKEMATIK RANGKAIAN Skala Digambar Draw Diperiksa Checked POLITEKNIK NEGERI UJUNG PANDANG
PROGRAM MIKROKONTROLER ;=================================== ;LATIHAN PROYEK AWAL
;MUHAMMAD ISMAIL BASIR 06 36 026 ;CHAIRIL ANAM RH 06 36 047 ;=================================== LIST P=16F84A ;MACHINE REGISTERS INDF EQU 000h TIMR0 EQU 001h PCL EQU 002h STATUS EQU 003h FSR EQU 004h PORTA EQU 005h PORTB EQU 006h ; ;USER REGISTER ERIN1 EQU 00Dh
IBE EQU 00Eh
CARH EQU 00Fh MIB EQU 010h ACO EQU 011h OCA EQU 012h ICA EQU 013h ACI EQU 014h ABC EQU 015h ERIN2 EQU 016h
CPORTB EQU 00Ah
; ;MACHINE VALUES W EQU 000h F EQU 001h Z EQU 002h C EQU 000h ;USER VALUES ;=================================== ORG 000h GOTO 0100h ;=================================== ;MAIN PROGRAM ;... ORG 100h MOVLW 01Fh MOVWF PORTA TRIS PORTA CLRW
MOVWF PORTB TRIS PORTB ;... ... MAIL MOVLW D'0' MOVWF ERIN1 MOVLW D'0' MOVWF ERIN2 ;... ... TESIN1 BTFSS PORTA,2 GOTO TESIN1 TESIN2 BTFSS PORTA,3 GOTO TESIN2 CEKSEN1 BTFSC PORTA,2 GOTO CEKSEN2 INCFSZ ERIN1 TEST BTFSS PORTA,2 GOTO TEST GOTO NYALA CEKSEN2 BTFSC PORTA,3 GOTO CEKSEN1 TEST1 BTFSS PORTA,3 GOTO TEST1 DECFSZ ERIN1 GOTO CEKSEN1 GOTO MATI ;... ... NYALA MOVLW D'255' MOVWF PORTB GOTO CEKSEN2 MATI CLRW MOVWF PORTB GOTO CEKSEN1 END
FOTO ALAT
KONTROL LAMPU OTOMATIS BERBASIS MIKROKONTROLER