Studi Optimasi Kemiringan Lambung Pontoon PLTGL-SB (Pembangkit Listrik Tenaga
Gelombang Laut-Sistem Bandulan) akibat Beban Gelombang Laut
S
aadillah Akbar
1), Daniel M. Rosyid
2), Mukhtasor
3) 1)Mahasiswa Teknik Kelautan
2,3)Dosen Jurusan Teknik Kelautan
PLTGL-SB adalah sebuah alat konversi energi yang memanfaatkan tenaga gelombang. Untuk memanfaatkan alat ini, sebuah struktur penopang diperlukan untuk mendukung alat ini di laut. Dalam penelitian ini, struktur penopang yang digunakan untuk mendukung PLTGL-SB adalah sebuah ponton dengan panjang, lebar, dan tinggi sarat air 6 m, 3 m, dan 1,5 m secara berturut-turut. Fokus dalam penelitian ini adalah kemiringan lambung ponton. Kemiringan lambung ponton divariasikan menjadi 4 yaitu 0o, 15o, 30o, dan 45o. Untuk mempermudah pengerjaan penelitian ini, digunakan ANSYS 12 dan NUMECA. Langkah pertama yang harus diselesaikan adalah menghitung stabilitas ponton. Kedua, ponton dimodelkan dengan menggunakan ANSYS 12. NUMECA digunakan untuk running model hasil dari pemodelan dengan menggunakan ANSYS 12. Hasil yang dianalisa dalam penelitian ini adalah output NUMECA. Output NUMECA berupa roll, kecepatan sudut ponton, dan distribusi tekanan hidrodinamis pada lambung ponton dengan variasi kemiringan lambung. Pemilihan kemiringan lambung yang optimum menggunakan metode pengambilan keputusan kuantitatif dengan menggunakan tabel keputusan. Variabel keputusan adalah kemiringan lambung dan kriteria keputusan adalah roll, kecepatan sudut, dan distribusi tekanan hidrodinamis pada lambung. Untuk tinggi gelombang 1 m, kemiringan lambung yang dipilih adalah 45o dengan roll 14,896o, kecepatan sudut 12,0321 derajat/detik, tekanan hidrodinamis maksimum 6.326,21 N/m2, dan tekanan hidrodinamis rata-rata 4.317,63 N/m2. Untuk tinggi gelombang 1,5 m, kemiringan lambung yang dipilih adalah 45o dengan roll 16,3866o, kecepatan sudut 12,8342 derajat/detik, tekanan hidrodinamis maksimum 3.668,56 N/m2, dan tekanan hidrodinamis rata-rata 2.589,86 N/m2.
Kata Kunci : Ponton, roll, Kecepatan sudut, Tekanan hidrodinamis, Metode pengambilan keputusan
kuantitatif, Tabel keputusan.
1. PENDAHULUAN
Pioner pengembangan alat konversi energi gelombang modern adalah Yoshi Mashuda sekitar tahun 1940an yang berjenis OWC (Oscillating Water Column). Masuda membuat buoy navigasi bertenaga gelombang laut. Kemudian pada tahun 1976, Masuda mempromosikan alat konversi energi tenaga gelombang yang lebih besar lagi yang bernama Kaimei (80 m x 12 m) yang digunakan sebagai alat penguji terapung beberapa OWC yang dilengkapi dengan berbagai jenis turbin udara (Falcao, 2010).
Pada tahun 1985, alat konversi tenaga gelombang jenis OWC skala penuh dibuat (350 dan 500 kW) di dekat Bergen, Skotlandia. Akan tetapi hingga tahun 1990, pengembangan alat konversi energi tenaga gelombang hanya sebatas
tingkatan akademik saja. Alat yang
dihasilkanpun berskala kecil seperti OWC yang dipasang di Pulau Islay, Skotlandia (75 kW). 2 buah OWC yang dibangun di ASIA: Alat konversi energi gelombang (60 kW) yang dipasang pada pemecah gelombang di Pelabuhan Sakata dan alat konversi dasar laut (125 kW)
yang dipasang di Trivandrum, India (Falcao, 2010).
Ide pembuatan AWS (Archimedes Wave Swing) muncul pada tahun 1994. Setahun kemudian, sebuah model skala 1:20 dibuat dalam sebuah kerjasama yang melibatkan
Netherland Energy Research
Foundation/Energy Research Center of
Netherland (ECN) dan WL Delft Hydraulic (Cruz).
Tahun 2002, Zamrisyaf menemukan alat
konversi energi dengan memanfaatkan
gelombang laut yang dinamakan Pembangkit
Listrik Tenaga Gelombang Laut-Sistem
Bandulan (PLTGL-SB). Alat tersebut
ditempatkan pada pontoon yang dipasang di laut. Ponton yang digunakan sebagai alat penopang PLTGL-SB merupakan hasil kerja sama antara PT. PLN (Persero) dan ITS (Arief dan Zamrisyaf, 2010).
Pembangkit Listrik Tenaga Gelombang Laut – Sistem Bandulan (PLTGL-SB) merupakan salah satu alat konversi energi alternatif untuk mengurangi ketergantungan akan sumber energi
fosil. Untuk bisa memaksimalkan kegunaan dari alat konversi tersebut diperlukan struktur penopang yang baik untuk pemasangan alat tersebut di laut. Struktur penopang yang digunakan untuk menopang alat tersebut adalah ponton.
Penelitian ponton untuk penopang PLTGL-SB telah dilakukan sebelumnya oleh Arif (2010). Dari penelitian tersebut terdapat beberapa bagian yang masih belum diteliti. Pengaruh perbedaan sudur kemiringan lambung terhadap gerakan yang dihasilkan dan distribusi gaya (tekanan) yang terjadi pada lambung ponton merupakan bagian yang masih belum diteliti pada penelitian sebelumnya. Oleh karena itu, dalam penelitian ini kedua hal tersebut menjadi fokus pembahasan. Ukuran ponton yang digunakan sama dengan ukuran ponton yang digunakan pada penelitian sebelumnya yaitu L= 6 m, B= 3 m, dan T= 1 m dengan tinggi total ponton D= 2 m.
Penelitian ini diselesaikan dengan menggunakan bantuan perangkat lunak ANSYS 12 dan NUMECA. Dalam pemilihan lambung ponton yang optimum, digunakan metode pengambilan keputusan dengan menggunakan tabel keputusan. Kemiringan lambung yang optimum akan digunakan sebagai lambung untuk PLTGL-SB.
2. DASAR TEORI 2.1 Gelombang reguler
Pada dasarnya gelombang dilautan bukanlah gelombang reguler melainkan gelombang acak. Perhitungan dengan menggunakan gelombang acak (irregular waves) sangat sulit dilakukan, oleh karena itu pengetahuan mengenai
gelombang reguler diperlukan untuk
mempermudah perhitungan. Gelombang acak sendiri merupakan superposisi dari beberapa gelombang reguler dengan tinggi gelombang, periode gelombang, amplitudo gelombang, serta arah perambatan gelombang yang berbeda-beda seperti yang terlihat pada gambar 1.
Gambar 1 Sebuah penjumlahan dari beberapa gelombang sinusoidal sederhana yang menghasilkan sebuah gelombang acak (Journee
and Massie)
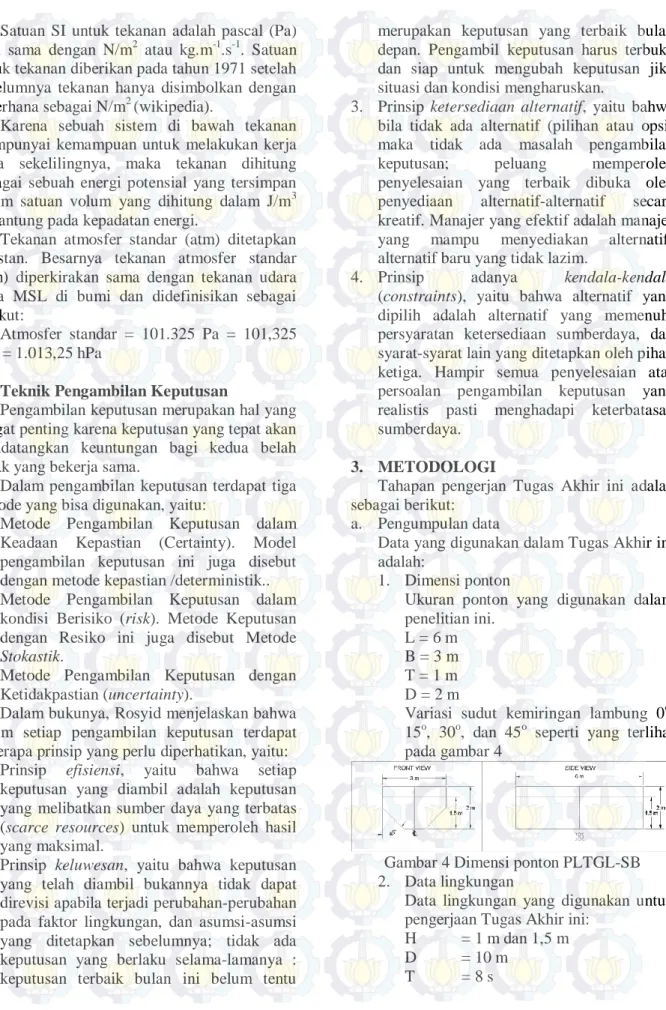
Gambar 2 Definisi gelombang harmonic (Journee and Massie)
dimana:
x = arah perambatan gelombang
positif h = kedalaman perairan = panjang gelombang = amplitudo gelombang H = tinggi gelombang = ( untuk gelombang sinosoidal. T = periode gelombang
= kecuraman gelombang (wave steepness)
Titik tertinggi pada gelombang disebut puncak gelombang (crest) dan titik terendah pada gelombang disebut lembah gelombang (trough).
Karena gelombang sinus dan kosinus diekspresikan dalam sebuah perbedaan sudut angular, maka panjang dan periode gelombang dikonversi menjadi sudut dengan menggunakan:
(2.5)
(2.6)
k = wave number (rad/m)
Kecepatan gelombang atau kecepatan fase untuk bentuk gelombang yang bergerak sepanjang satu panjang gelombang dengan satu periode adalah sebagai berikut:
(2.7)
Jika gelombang bergerak ke arah x positif, profil gelombang – bentuk dari permukaan air – bisa dijelaskan sebagai sebuah fungsi dari x dan t.
(2.8)
Sedangkan untuk gelombang yang bergerak ke arah x negatif diberikan dalam persamaan berikut:
(2.9)
Untuk gelombang dengan rasio tinggi dan panjang gelombangnya adalah 1/50 atau lebih kecil, dapat menggunakan teori gelombang linier yang mempunyai akurasi cukup tepat dalam memprediksi sifat kinematis dari gelombang. Persamaan matematis untuk displasemen permukaan bebas (free – surface displacement) dan periode gelombang adalah sebagai berikut (McCormick 1973).
( ) (2.10)
Dan
* ( )+ ⁄ (2.11)
Dimana tanh ( ) adalah tangen hiperbolic, f adalah frekwensi gelombang, ω adalah frekwensi gelombang circular (2πf), g adalah konstanta gravitasi dan h adalah kedalaman perairan. Periode T normalnya dipertimbangkan terhadap variasi waktu dan kedalaman. Bagaimanapun, hal ini tidaklah benar karena jarak yang ditempuh gelombang. Persamaan (2.11) dapat ditulis ulang untuk memperoleh persamaan dari panjang gelombang sebagai berikut
(
)
2.2 Teori dasar gerak bangunan laut
Pada dasarnya benda yang mengapung mempunyai 6 mode gerakan bebas yang terbagi menjadi dua kelompok, yaitu 3 mode gerakan translasional dan 3 mode gerakan rotasional. Berikut adalah keenam mode gerakan tersebut : 1. Mode gerak translasional
Surge, gerakan transversal arah sumbu x
Sway, gerakan transversal arah sumbu y
Heave, gerakan transversal arah sumbu z
2. Mode gerak rotasional
Roll, gerakan rotasional arah sumbu x Pitch, gerakan rotasional arah sumbu y Yaw, gerakan rotasional arah sumbu z Definisi gerakan bangunan laut dalam enam derajat kebebasan dapat dijelaskan dengan Gambar 3. Dengan memakai konversi sumbu tangan kanan tiga gerakan translasi pada arah sumbu x,y dan z, adalah masing-masing surge (ζ1), sway (ζ2) dan heave (ζ3), sedangkan untuk gerakan rotasi terhadap ketiga sumbu adalah roll (ζ4), pitch (ζ5)dan yaw (ζ6).
Gambar 3 Tanda gerakan translasi dan rotasi kapal
2.3 Tekanan (Pressure)
Tekanan (Pressure) adalah gaya per luasan yang diaplikasikan dalam sebuah garis tegak lurus terhadap permukaan suatu objek.
Secara matematis, persamaan tekanan dirumuskan sebagai berikut:
(2.13)
Dimana:
P adalah tekanan (pressure)
F adalah gaya normal yang bekerja pada suatu objek
A adalah luasan pada suatu permukaan dimana gaya normal bekerja
Satuan SI untuk tekanan adalah pascal (Pa) atau sama dengan N/m2 atau kg.m-1.s-1. Satuan untuk tekanan diberikan pada tahun 1971 setelah sebelumnya tekanan hanya disimbolkan dengan sederhana sebagai N/m2 (wikipedia).
Karena sebuah sistem di bawah tekanan mempunyai kemampuan untuk melakukan kerja pada sekelilingnya, maka tekanan dihitung sebagai sebuah energi potensial yang tersimpan dalam satuan volum yang dihitung dalam J/m3 tergantung pada kepadatan energi.
Tekanan atmosfer standar (atm) ditetapkan konstan. Besarnya tekanan atmosfer standar (atm) diperkirakan sama dengan tekanan udara pada MSL di bumi dan didefinisikan sebagai berikut:
Atmosfer standar = 101.325 Pa = 101,325 kPa = 1.013,25 hPa
2.4 Teknik Pengambilan Keputusan
Pengambilan keputusan merupakan hal yang sangat penting karena keputusan yang tepat akan mendatangkan keuntungan bagi kedua belah pihak yang bekerja sama.
Dalam pengambilan keputusan terdapat tiga metode yang bisa digunakan, yaitu:
1. Metode Pengambilan Keputusan dalam Keadaan Kepastian (Certainty). Model pengambilan keputusan ini juga disebut dengan metode kepastian /deterministik.. 2. Metode Pengambilan Keputusan dalam
kondisi Berisiko (risk). Metode Keputusan dengan Resiko ini juga disebut Metode Stokastik.
3. Metode Pengambilan Keputusan dengan Ketidakpastian (uncertainty).
Dalam bukunya, Rosyid menjelaskan bahwa dalam setiap pengambilan keputusan terdapat beberapa prinsip yang perlu diperhatikan, yaitu: 1. Prinsip efisiensi, yaitu bahwa setiap
keputusan yang diambil adalah keputusan yang melibatkan sumber daya yang terbatas (scarce resources) untuk memperoleh hasil yang maksimal.
2. Prinsip keluwesan, yaitu bahwa keputusan yang telah diambil bukannya tidak dapat direvisi apabila terjadi perubahan-perubahan pada faktor lingkungan, dan asumsi-asumsi yang ditetapkan sebelumnya; tidak ada keputusan yang berlaku selama-lamanya : keputusan terbaik bulan ini belum tentu
merupakan keputusan yang terbaik bulan depan. Pengambil keputusan harus terbuka dan siap untuk mengubah keputusan jika situasi dan kondisi mengharuskan.
3. Prinsip ketersediaan alternatif, yaitu bahwa bila tidak ada alternatif (pilihan atau opsi) maka tidak ada masalah pengambilan
keputusan; peluang memperoleh
penyelesaian yang terbaik dibuka oleh penyediaan alternatif-alternatif secara kreatif. Manajer yang efektif adalah manajer
yang mampu menyediakan
alternatif-alternatif baru yang tidak lazim.
4. Prinsip adanya kendala-kendala
(constraints), yaitu bahwa alternatif yang dipilih adalah alternatif yang memenuhi persyaratan ketersediaan sumberdaya, dan syarat-syarat lain yang ditetapkan oleh pihak ketiga. Hampir semua penyelesaian atas persoalan pengambilan keputusan yang realistis pasti menghadapi keterbatasan sumberdaya.
3. METODOLOGI
Tahapan pengerjan Tugas Akhir ini adalah sebagai berikut:
a. Pengumpulan data
Data yang digunakan dalam Tugas Akhir ini adalah:
1. Dimensi ponton
Ukuran ponton yang digunakan dalam penelitian ini.
L = 6 m B = 3 m T = 1 m D = 2 m
Variasi sudut kemiringan lambung 0o, 15o, 30o, dan 45o seperti yang terlihat pada gambar 4
Gambar 4 Dimensi ponton PLTGL-SB 2. Data lingkungan
Data lingkungan yang digunakan untuk pengerjaan Tugas Akhir ini:
H = 1 m dan 1,5 m
D = 10 m
Pemilihan lokasi tidak ditentukan dalam pemilihan data lingkungan yang digunakan. Lokasi pemasangan ponton
akan disesuaikan dengan hasil
pemodelan dengan menggunakan
bantuan perangkat lunak. 3. Data mooring
Data mooring yang digunakan
berdasarkan data dari Anchor Manual 2010.
D = 64 mm MBL = 3360 kN
Axial Stiffness = 189,4 MN Rope weight = 17,3 kg/m
Submerge rope weight = 15,3 kg/m Torque factor = 4,7 Nm/kN
b. Cek stabilitas ponton
Cek stabilitas dilakukan untuk mengetahui stabilitas ponton dengan variasi kemiringan lambung yang telah ditentukan yaitu ponton pada kemiringan 10o.
c. Pemodelan ponton
Pemodelan ponton dilakukan dengan
menggunakan bantuan perangkat lunak ANSYS 12 dan NUMECA. Dalam proses ini juga dilakukan proses meshing model, penentuan boundary layer, input data baik data lingkungan mau data mooring.
d. Running model
Running model dilakukan dengan
menggunakan bantuan perangkat lunak NUMECA. Hasil yang didapatkan dari running model adalah sudut roll, kecepatan sudut, dan distribusi tekanan yang terjadi pada lambung ponton.
e. Optimasi
Pemilihan kemiringan lambung ponton yang
paling optimum dilakukan dengan
menggunakan metode pengambilan
keputusan kuantitatif dengan menggunakan tabel keputusan. Variabel keputusan adalah variasi kemiringan lambung ponton dan
kriteria keputusan untuk memilih
kemiringan lambung ponton yang optimum adalah sudut roll, kecepatan sudut, dan distribusi tekanan pada lambung ponton.
4. HASIL DAN PEMBAHASAN
Setelah dilakukan running model dengan
menggunakan bantuan perangkat lunak
NUMECA, didapatkan hasil berupa sudut roll,
kecepatan sudut, dan distribusi tekanan yang terjadi pada lambung ponton. Hasil yang didapatkan tersebut berlaku untuk ponton dalam keadaan freefloating maupun ponton yang tertambat serta untuk tinggi gelombang 1,5 dan 1 m.
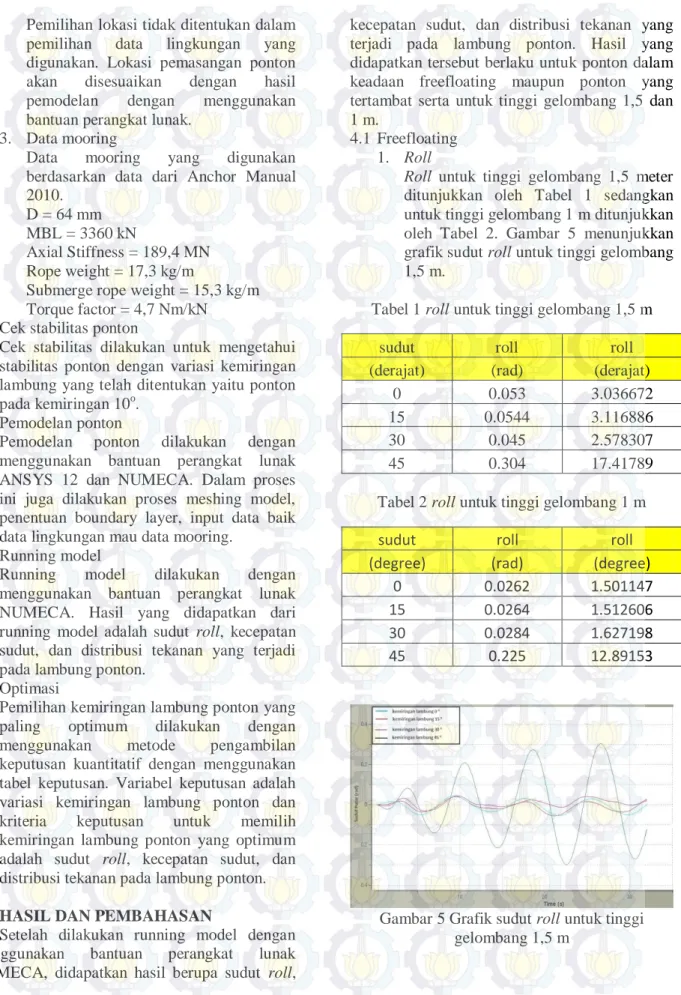
4.1 Freefloating 1. Roll
Roll untuk tinggi gelombang 1,5 meter ditunjukkan oleh Tabel 1 sedangkan untuk tinggi gelombang 1 m ditunjukkan oleh Tabel 2. Gambar 5 menunjukkan grafik sudut roll untuk tinggi gelombang 1,5 m.
Tabel 1 roll untuk tinggi gelombang 1,5 m
sudut roll roll
(derajat) (rad) (derajat)
0 0.053 3.036672
15 0.0544 3.116886
30 0.045 2.578307
45 0.304 17.41789
Tabel 2 roll untuk tinggi gelombang 1 m
sudut roll roll
(degree) (rad) (degree)
0 0.0262 1.501147
15 0.0264 1.512606
30 0.0284 1.627198
45 0.225 12.89153
Gambar 5 Grafik sudut roll untuk tinggi gelombang 1,5 m
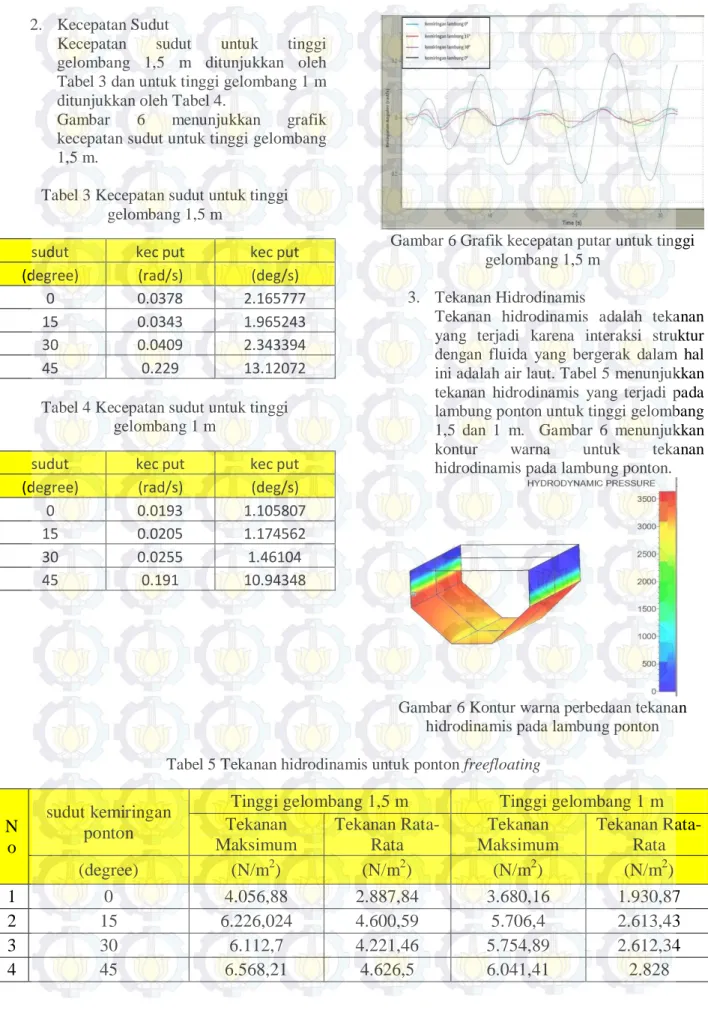
2. Kecepatan Sudut
Kecepatan sudut untuk tinggi
gelombang 1,5 m ditunjukkan oleh Tabel 3 dan untuk tinggi gelombang 1 m ditunjukkan oleh Tabel 4.
Gambar 6 menunjukkan grafik
kecepatan sudut untuk tinggi gelombang 1,5 m.
Tabel 3 Kecepatan sudut untuk tinggi gelombang 1,5 m
sudut kec put kec put
(degree) (rad/s) (deg/s)
0 0.0378 2.165777
15 0.0343 1.965243
30 0.0409 2.343394
45 0.229 13.12072
Tabel 4 Kecepatan sudut untuk tinggi gelombang 1 m
sudut kec put kec put
(degree) (rad/s) (deg/s)
0 0.0193 1.105807
15 0.0205 1.174562
30 0.0255 1.46104
45 0.191 10.94348
Gambar 6 Grafik kecepatan putar untuk tinggi gelombang 1,5 m
3. Tekanan Hidrodinamis
Tekanan hidrodinamis adalah tekanan yang terjadi karena interaksi struktur dengan fluida yang bergerak dalam hal ini adalah air laut. Tabel 5 menunjukkan tekanan hidrodinamis yang terjadi pada lambung ponton untuk tinggi gelombang 1,5 dan 1 m. Gambar 6 menunjukkan
kontur warna untuk tekanan
hidrodinamis pada lambung ponton.
Gambar 6 Kontur warna perbedaan tekanan hidrodinamis pada lambung ponton Tabel 5 Tekanan hidrodinamis untuk ponton freefloating
N
o
sudut kemiringan
ponton
Tinggi gelombang 1,5 m
Tinggi gelombang 1 m
Tekanan
Maksimum
Tekanan
Rata-Rata
Tekanan
Maksimum
Tekanan
Rata-Rata
(degree)
(N/m
2)
(N/m
2)
(N/m
2)
(N/m
2)
1
0
4.056,88
2.887,84
3.680,16
1.930,87
2
15
6.226,024
4.600,59
5.706,4
2.613,43
3
30
6.112,7
4.221,46
5.754,89
2.612,34
4
45
6.568,21
4.626,5
6.041,41
2.828
4.2 Mooring a. Sudut Roll
Sudut putar untuk tinggi gelombang 1,5 meter ditunjukkan oleh Tabel 7 sedangkan untuk tinggi gelombang 1 m ditunjukkan oleh Tabel 8. Gambar 7 menunjukkan grafik sudut putar untuk tinggi gelombang 1,5 m.
Tabel 7 roll untuk tinggi gelombang 1,5 m
sudut roll roll
(degree) (rad) (degree)
0 0.03 1.718871
15 0.0462 2.647061
30 0.03 1.718871
45 0.286 16.38657
Tabel 8 roll untuk tinggi gelombang 1 m
sudut roll roll
(degree) (rad) (degree)
0 0.0258 1.478229
15 0.027 1.546984
30 0.0258 1.478229
45 0.26 14.89688
Gambar 7 Grafik sudut roll untuk tinggi gelombang 1 m
b. Kecepatan Sudut
Kecepatan sudut untuk tinggi
gelombang 1,5 m ditunjukkan oleh Tabel 9 dan untuk tinggi gelombang 1 m ditunjukkan oleh tabel 10.
Gambar 8 menunjukkan grafik
kecepatan sudut untuk tinggi gelombang 1,5 m.
Tabel 9 kecepatan sudut untuk tinggi gelombang 1,5 m
sudut kec put kec put
(degree) (rad/s) (deg/s)
0 0.0374 2.142859
15 0.0345 1.976702
30 0.0375 2.148589
45 0.224 12.83424
Tabel 10 kecepatan sudut untuk tinggi gelombang 1 m
sudut kec put kec put
(degree) (rad/s) (deg/s)
0 0.0256 1.46677
15 0.0179 1.025593
30 0.0255 1.46104
45 0.21 12.0321
Gambar 8 Grafik kecepatan sudut untuk tinggi gelombang 1,5 m
c. Tekanan Hidrodinamis
4.3 Tekanan hidrodinamis adalah tekanan yang terjadi karena interaksi struktur dengan fluida yang bergerak dalam hal ini adalah air laut. Tabel 5 menunjukkan tekanan hidrodinamis yang terjadi pada lambung ponton untuk tinggi gelombang 1,5 dan 1 m. Gambar 6 menunjukkan kontur warna untuk tekanan hidrodinamis pada lambung ponton.
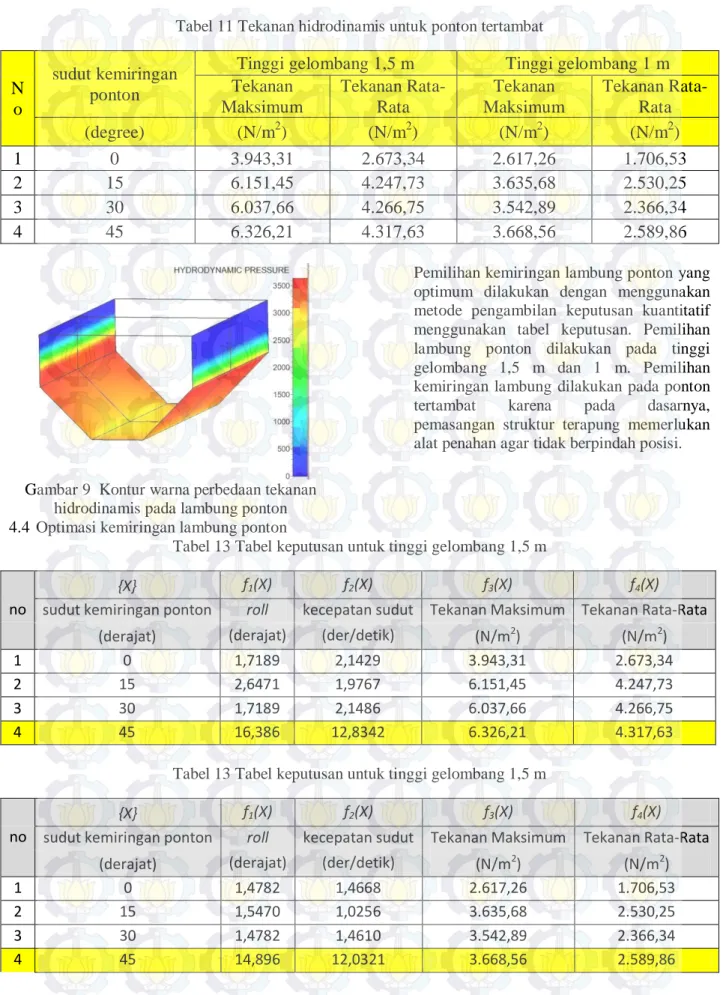
Tabel 11 Tekanan hidrodinamis untuk ponton tertambat
N
o
sudut kemiringan
ponton
Tinggi gelombang 1,5 m
Tinggi gelombang 1 m
Tekanan
Maksimum
Tekanan
Rata-Rata
Tekanan
Maksimum
Tekanan
Rata-Rata
(degree)
(N/m
2)
(N/m
2)
(N/m
2)
(N/m
2)
1
0
3.943,31
2.673,34
2.617,26
1.706,53
2
15
6.151,45
4.247,73
3.635,68
2.530,25
3
30
6.037,66
4.266,75
3.542,89
2.366,34
4
45
6.326,21
4.317,63
3.668,56
2.589,86
Gambar 9 Kontur warna perbedaan tekanan hidrodinamis pada lambung ponton 4.4 Optimasi kemiringan lambung ponton
Pemilihan kemiringan lambung ponton yang optimum dilakukan dengan menggunakan metode pengambilan keputusan kuantitatif menggunakan tabel keputusan. Pemilihan lambung ponton dilakukan pada tinggi gelombang 1,5 m dan 1 m. Pemilihan kemiringan lambung dilakukan pada ponton
tertambat karena pada dasarnya,
pemasangan struktur terapung memerlukan alat penahan agar tidak berpindah posisi.
Tabel 13 Tabel keputusan untuk tinggi gelombang 1,5 m
no
{X} f1(X) f2(X) f3(X) f4(X)
sudut kemiringan ponton roll kecepatan sudut Tekanan Maksimum Tekanan Rata-Rata
(derajat) (derajat) (der/detik) (N/m2) (N/m2)
1 0 1,7189 2,1429 3.943,31 2.673,34
2 15 2,6471 1,9767 6.151,45 4.247,73
3 30 1,7189 2,1486 6.037,66 4.266,75
4 45 16,386 12,8342 6.326,21 4.317,63
Tabel 13 Tabel keputusan untuk tinggi gelombang 1,5 m
no
{X} f1(X) f2(X) f3(X) f4(X)
sudut kemiringan ponton roll kecepatan sudut Tekanan Maksimum Tekanan Rata-Rata
(derajat) (derajat) (der/detik) (N/m2) (N/m2)
1 0 1,4782 1,4668 2.617,26 1.706,53
2 15 1,5470 1,0256 3.635,68 2.530,25
3 30 1,4782 1,4610 3.542,89 2.366,34
Berdasarkan Tabel 13 dan Tabel 14, dapat disimpulkan bahwa lambung ponton dengan kemiringan 45o merupakan kemiringan lambung yang paling pantas dipilih karena sudah memenuhi kriteria yang telah ditentukan untuk pemilihan kemiringan lambung yang paling optimum.
Pemilihan lambung dapat langsung
dilakukan karena tidak adanya batasan (constraint) dalam penentuan kemiringan lambung yang optimum.
5. KESIMPULAN
Berdasarkan rumusan masalah yang telah ditentukan dan hasil dari analisa data yang diperoleh, maka dapat ditarik kesimpulan sebagai berikut:
1. Kemiringan lambung ponton sangat mempengaruhi pola gerak ponton. perbedaan tersebut berlaku baik untuk tinggi gelombang 1,5 m maupun 1 m. Perubahan roll tidak linear berdasarkan perbedaan kemiringan lambung ponton karena pada kemiringan lambung 30o roll ponton menjadi lebih kecil jika
dibandingkan dengan kemiringan
lambung ponton 15o. Kemudian pada saat sudut 45o sudut menjadi sangat besar.
2. Distribusi tekanan hidrodinamis yang ditampilkan dalam penelitian ini hanya untuk bagian lambung ponton saja
karena pada lokasi tersebut
dimungkinkan terjadi tekanan yang besar akibat interaksi dengan gelombang laut. Kemiringan lambung ponton sangat mempengaruhi tekanan yang terjadi pada lambung. Distibusi tekanan hidrodinamis pada lambung ponton mengalami kenaikan seiring bertambah besarnya kemiringan lambung ponton. Akan tetapi, seperti halnya roll, pada saat kemiringan lambung 30o, distribusi
tekanan hidrodinamis mengalami
penurunan kemudian mengalami
kenaikan lagi pada kemiringan lambung 45o.
3. Sudut kemiringan lambung yang paling optimum dari 4 variasi kemiringan
lambung ponton yang dipilih dalam Tugas Akhir ini adalah 45o baik untuk tinggi gelombang 1,5 m maupun 1 m. Kemiringan lambung ponton yang dipilih adalah sudut kemiringan lambung pada ponton yang tertambat sedangkan data-data yang dihasilkan untuk ponton freefloating hanya sebagai pembanding saja.
UCAPAN TERIMA KASIH
Ucapan terima kasih penulis ucapkan kepada Bapak Irfan yang telah membantu dalam proses pemodelan dan running model hingga penelitian ini bisa selesai.
DAFTAR PUSTAKA
Arief, Irfan Syarif dan Zamrisyaf Sy. 2010. Analysis of Barge Models To Capture The Energy From Ocean Waves, Proceeding International ISCOT-The Royal Institution of Naval Architecs (RINA), Surabaya
J.M.J Journee and Massie, W.W. 2001. Offshore Hydromechanic First Edition. Delft University of Technology.
Meisen, P. and Loiseau, A. Ocean Energy Technologies for Renewable Energy Generation. Global Energy Network Institute (GENI) & Research Associate, Global Energy Network Institute. Falcao , Antonio F. De O. Renewable and
Sustainable Energy Reviews. IDMEC, Instituto Superior Tecnico, Technical University of Lisbon, 1049-001 Lisbon, Portugal.