BAB III. METODOLOGI PENELITIAN
3.1 Waktu dan Tempat Penelitian
Waktu penelitian dimulai pada bulan Maret sampai dengan bulan Juni 2010 dan bulan Juli sampai bulan Agustus 2010 bertempat di Water Tank Labotarium Akustik Kelautan, Departemen Ilmu dan Teknologi Kelautan, Fakultas Perikanan dan Ilmu Kelautan Institut Pertanian Bogor
3.2 Alat
Alat yang digunakan untuk penelitian ini adalah 1set alat PcFF80 PC Fishfinder dan Notebook HP 6350b dilengkapi perangkat lunak seperti Microsoft office, dan MATLAB r2008a
3.2.1 PcFF80 PC Fishfinder
Satu set PcFF80 PC Fishfinder dengan keterangan spesifikasi pada Tabel 1 di bawah ini Tabel 1. Spesifikasi PcFF80 PC
Operating Voltage 9.5 to 16.0 VDC, 0.05 amps nominal, 4.7 amps peak at max power Indicator Front panel LED for Power ON/Off and communications indicator Output Power 2560 watts peak-to-peak (320W RMS). 24KW DSP processed
power (3200 WRMS)
Depth Capability 1000 feet or more at 200kHz, 1500 Feet or more at 50kHz Operating temperature 0 to 50 deg Celsius ( 32 to 122 deg Fahrenheit).
Interface Box 100 x 80 x 50 mm (4 x 3.2 x 2 inch). Powder Coated Aluminum Extrusion
Interface RS-232, 115 KBaud, serial data and USB
Transducer Dual Frequency 50/200kHz, Depth/Temperature (single-beam echosounder
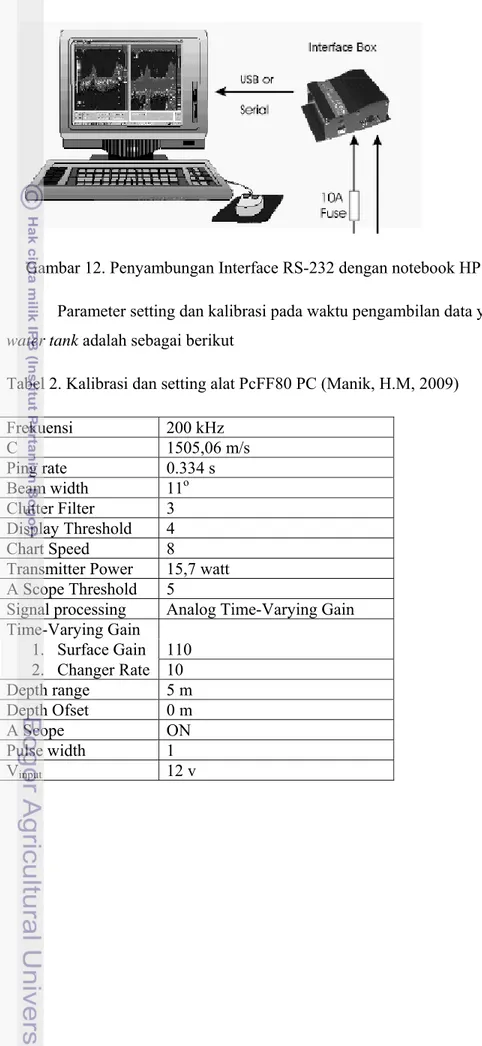
Echosounder tersebut terhubung ke notebook HP 6350b melalui port pararel yang disambungkan terlebih dahulu ke interface RS-232 menggunakan kabel sepanjang 10 m
Gambar 12. Penyambungan Interface RS-232 dengan notebook HP 6350b dan tranducer Parameter setting dan kalibrasi pada waktu pengambilan data yang dilakukan pada
water tank adalah sebagai berikut
Tabel 2. Kalibrasi dan setting alat PcFF80 PC (Manik, H.M, 2009)
Frekuensi 200 kHz C 1505,06 m/s Ping rate 0.334 s Beam width 11o Clutter Filter 3 Display Threshold 4 Chart Speed 8
Transmitter Power 15,7 watt A Scope Threshold 5
Signal processing Analog Time-Varying Gain Time-Varying Gain 110 1. Surface Gain 2. Changer Rate 10 Depth range 5 m Depth Ofset 0 m A Scope ON Pulse width 1 Vinput 12 v
3.2.2 Notebook HP 6350b
Spesifikasi Notebook HP 6350b adalah sebagai berikut
1. Sistem Operasi : Windows Xp Professional 2002 service pack 2 2. Processor : Intel(R) Core(TM)2 Duo CPU
3. RAM : 3 Gb
4. SVGA : 1 Gb Share with RAM 5. HDD : 300 Gb
3.3 CruzPro PC Fishfinder
Perangkat lunak yang digunakan untuk mengambil data primer ikan pada water tank yang dihubungkan dengan single-beam echosounder dual frekuensi.
Sistem-sistem minimal yang dibutuhkan untuk menginstall software ini adalah sebagai berikut:
WIN98 SE, 2000, XP and Vista
500 Mhz Pentium PC (Serial Port (16550 compatible UART) atau USB port 128MB RAM
50MB Hard Drive space
SVGA Graphics (1024 x 768 resolution) Mouse / Keyboard
Output data ini berupa nilai-nilai amplitudo yang direkam oleh echosounder dalam eksistensi file *.I
Perangkat Microsoft Office yang digunakan adalah M.S Excel 2007 untuk membuka file yang bereksistensi *.I yang selanjutnya digunakan untuk merapihkan dan merata-rata kan data amplitude.
3.4 Matlab r2008a
Perangkat ini digunakan untuk mengolah data dengan metode wavelet baik menggunakan toolbox maupun syntax sendiri serta menghasilkan tampilan visual grafik dalam bentuk satu dimensi, dua dimensi dan 3 dimensi dari data amplitudo yang dihasilkan,
serta menghitung nilai-nilai yang dibuthkan dalam pengolahan data akustik, seperti Sv, TS dan sebagainya
3.5 Pengambilan Data Akustik
3.5.1 Ikan Kelompok
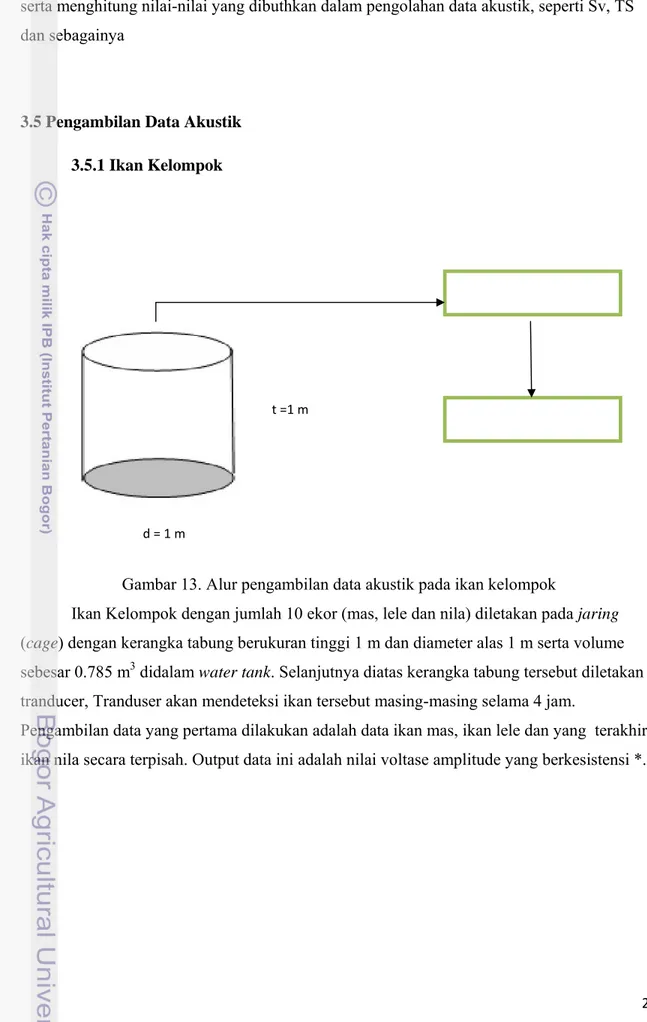
Gambar 13. Alur pengambilan data akustik pada ikan kelompok
Ikan Kelompok dengan jumlah 10 ekor (mas, lele dan nila) diletakan pada jaring (cage) dengan kerangka tabung berukuran tinggi 1 m dan diameter alas 1 m serta volume sebesar 0.785 m3 didalam water tank. Selanjutnya diatas kerangka tabung tersebut diletakan tranducer, Tranduser akan mendeteksi ikan tersebut masing-masing selama 4 jam.
Pengambilan data yang pertama dilakukan adalah data ikan mas, ikan lele dan yang terakhir ikan nila secara terpisah. Output data ini adalah nilai voltase amplitude yang berkesistensi *.I
CruzPro PC Fishfinder
Data bereksistensi *.I
t =1 m
3.5.2 Ikan tunggal
Berikut ini adalah alur pengambilan data ikan tunggal menggunakan tilting
mechanism
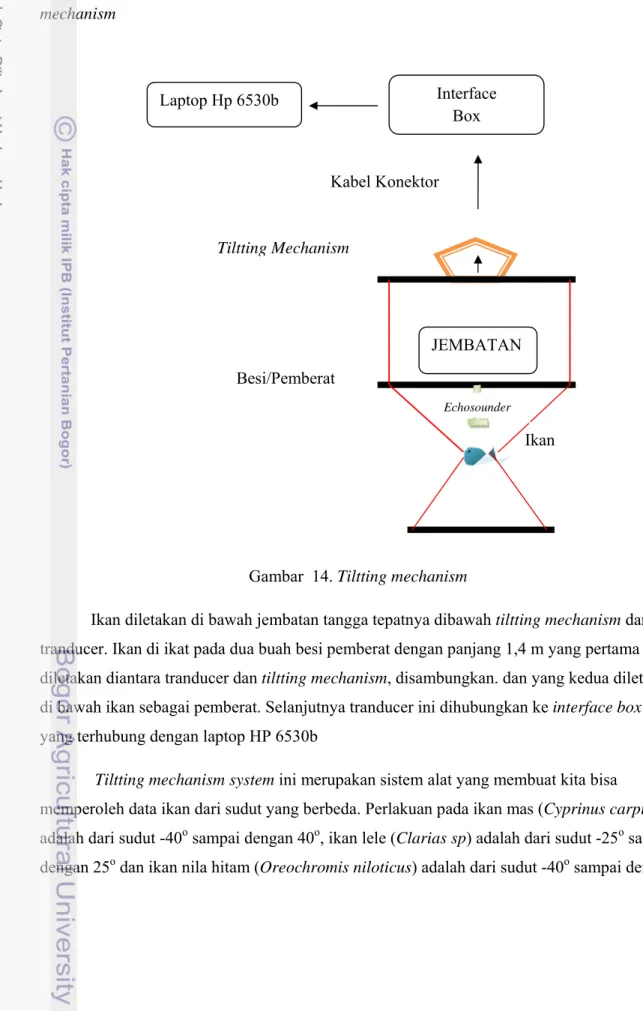
Gambar 14. Tiltting mechanism
Ikan diletakan di bawah jembatan tangga tepatnya dibawah tiltting mechanism dan tranducer. Ikan di ikat pada dua buah besi pemberat dengan panjang 1,4 m yang pertama diletakan diantara tranducer dan tiltting mechanism, disambungkan. dan yang kedua diletakan di bawah ikan sebagai pemberat. Selanjutnya tranducer ini dihubungkan ke interface box yang terhubung dengan laptop HP 6530b
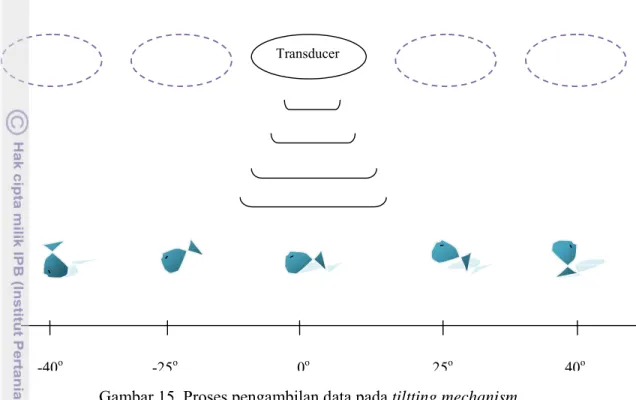
Tiltting mechanism system ini merupakan sistem alat yang membuat kita bisa memperoleh data ikan dari sudut yang berbeda. Perlakuan pada ikan mas (Cyprinus carpio) adalah dari sudut -40o sampai dengan 40o, ikan lele (Clarias sp) adalah dari sudut -25o sampai dengan 25o dan ikan nila hitam (Oreochromis niloticus) adalah dari sudut -40o sampai dengan
JEMBATAN Interface Box Laptop Hp 6530b Kabel Konektor Tiltting Mechanism Besi/Pemberat Echosounder Ikan
40o bisa dilihat pada gambar 15. Data output yang diperoleh berupa nilai voltase amplitudo yang disimpan dalam file bereksistensi *.I
Gambar 15. Proses pengambilan data pada tiltting mechanism. 3.6 Pengolahan Data
3.6.1 Ikan Kelompok
Data yang bereksistensi (*.I) selanjutnya di export ke Microsoft Excel 2007 untuk dirapihkan dan di ambil nilai amplitudonya saja, setelah itu dilakukan pengolahan data kembali dengan matlab untuk diambil nilai Amplitudo, Amplitudo Relatif dan Echo Strength
Gambar 16. Alur Komputasi data
Transducer
-40o -25o 0o 25o 40o
Data (*.I) Excel Matlab r2008a
Amplitudo
Amplitudo Relatif Echo Strength
Nilai Amplitudo di dapat dari rata-rata pantulan pada data (*.I) pada setiap pingnya (Manik, 2010)
∑ ,
………..(19) dimana:
A(i) = Amplitudo pada ping ke-i
X(i,j) = Nilai pantulan ke-j sampai k pada ping ke-i
k = Total pantulan
Selanjutnya untuk nilai amplitudo relatif adalah perbandingan antara nilai amplitudo dengan nilai pantulan yang maximum, secara matematis di tuliskan sebagai berikut
………(20) dimana:
= Amplitudo relatif pada ping ke-i
A(i) = Amplitudo pada ping ke-i
255 = Voltase Amplitudo Dasar Water Tank
Untuk nilai Echo Strength (Es) diperoleh dengan menggunakan rumus
10 log ………(21)
dimana :
Es(i) = Nilai Echo Strength pada ping ke-i
= Amplitudo relatif pada ping ke-i
Nilai Echo Strength ini selanjutnya menjadi nilai input untuk metode Continous
Wavelet Transfrom (CWT). Pada Matlab, syntak yang diberikan adalah sebagai berikut: W = cwt(Ss(i),SCALES,'wname',PLOTMODE) ……….……..(22)
Sumber : Mathworks (2000) dimana :
W = nilai koefisien dari CWT cwt = Continous Wavelet Transfrom Es(i) = Echo Strength pada ping ke-i
SCALES = Parameter dilatasi yang kita inginkan ‘Wname’ = Mother Wavelet
Untuk PLOTMODE deskripsinya ada pada Tabel 3 di bawah ini (Mathworks, 2000) Tabel 3. Syntak PLOTMODE yang digunakan dalam pengolahan wavelet
PLOT MODE Deskripsi
‘lvl’ Pewarnaan berdasarkan scale by scale ‘glb’ Pewarnaan bedasarkan semua scale
‘abslvl’ Pewarnaan berdasarkan scale by scale dengan menggunakan nilai absolute dari koefisien CWT
‘absglb’ Pewarnaan bedasarkan semua scale dengan menggunakan nilai absolute dari koefisien CWT
Grafik yang dibentuk dari nilai koefisen CWT selanjutnya digunakan untuk identifikasi target seperti ukuran-ukuran dari target
3.6.2 Ikan Tunggal
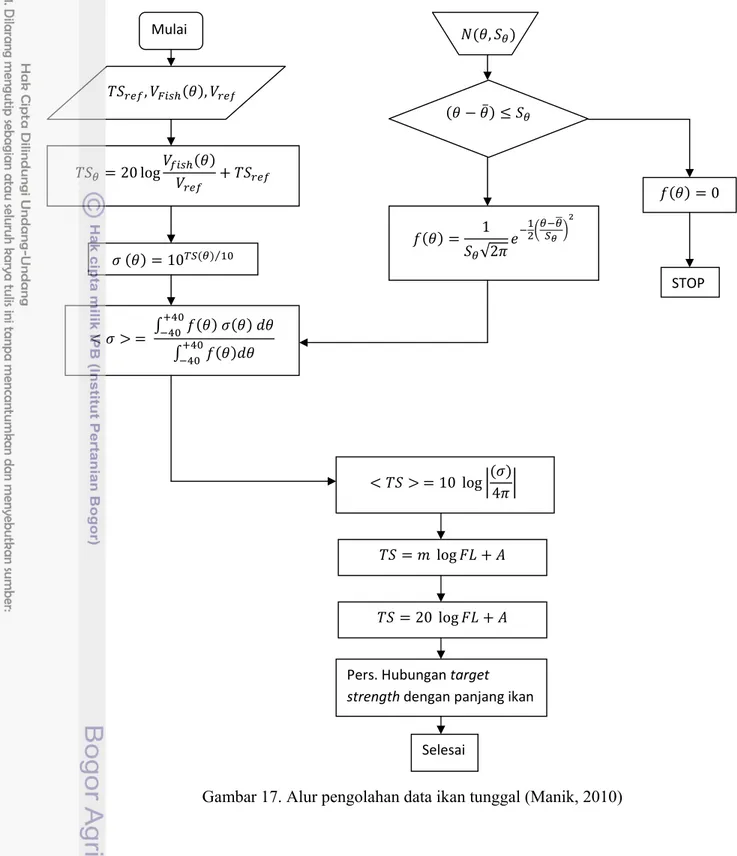
Pengolahan data akustik untuk ikan tunggal berbeda dengan ikan kelompok karena adanya perbedaan perlakuan dalam menentukan posisi sudut ikan yang dilakukan secara manual. Untuk lebih jelasnya perhatikan alur pengolahan data pada Gambar 17.
Gambar 17. Alur pengolahan data ikan tunggal (Manik, 2010) Mulai , , 20 log 10 ⁄ 10 log 4 log 20 log Pers. Hubungan target strength dengan panjang ikan Selesai , 1 √2 0 STOP
Data yang di dapat dalam pengukuran adalah voltase amplitudo setiap perlakuan sudut pada ikan ( ), Voltase pada alat dan nilai pantulan balik bandul pejal sebagai acuan , dimana:
20 log ………. (23)
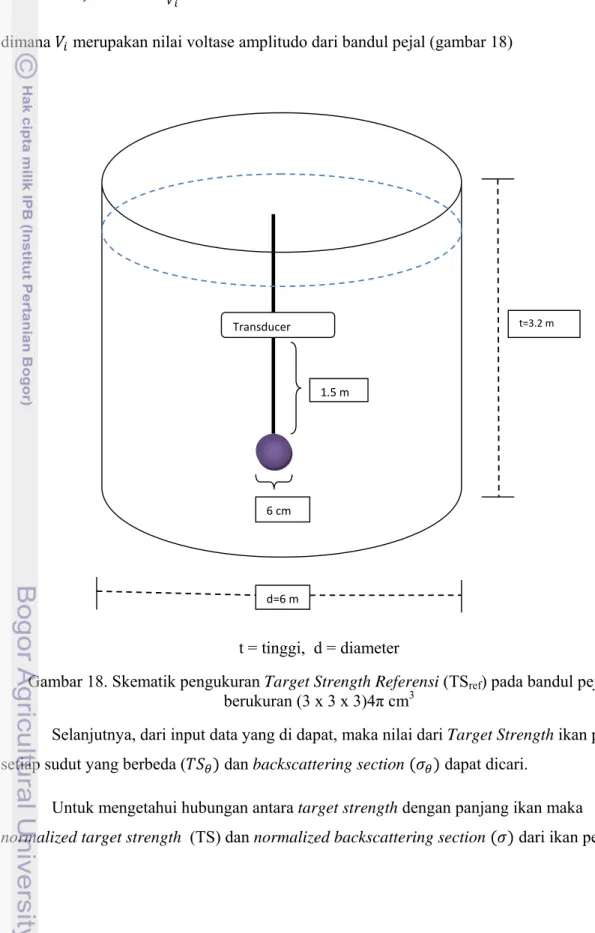
dimana merupakan nilai voltase amplitudo dari bandul pejal (gambar 18)
t = tinggi, d = diameter
Gambar 18. Skematik pengukuran Target Strength Referensi (TSref) pada bandul pejal berukuran (3 x 3 x 3)4π cm3
Selanjutnya, dari input data yang di dapat, maka nilai dari Target Strength ikan pada setiap sudut yang berbeda ( dan backscattering section dapat dicari.
Untuk mengetahui hubungan antara target strength dengan panjang ikan maka normalized target strength (TS) dan normalized backscattering section dari ikan perlu
Transducer
d=6 m 6 cm
1.5 m
dicari. Target strength dan backscattering strength merupakan nilai pantulan keseluruhan dari ikan melalui pendekatan peluang secara statistik dengan menggunakan rumus dari
Probability Density Function (PDF) dalam hal ini dilambangkan .
Karena melalui pendekatan statistik maka ada syarat yang perlu di penuhi yaitu nilai dari hasil pengurangan sudut ikan dengan rata-ratanya harus kurang atau sama dengan dari nilai simpangan bakunya, jika syarat ini tidak dipenuhi maka nilai 0