ABSTRACT
In the previous studies, laparoscopic myomectomy provided several advantages. Postoperative ad-hesion is one of potential negative risk of this procedure. Recently, robot-assited laparoscopic my-omectomy is performed to minimize postoperative complications of conventional mymy-omectomy. The robotic system is called da Vinci myomectomy. Da Vinci myomectomy offers some potential ben-efits compared to conventional myomectomy.
This technique may improve efficiency, accuracy, ease, and comfort associated with the performance of laparoscopy.
Keywords: laparoscopic, myomectomy, robotic techniques, da Vinci, conventional laparoscopy.
Miomektomi dengan Teknik
Laparoskopi Konvensional
dan Laparoskopi Robotik
Denny KhusenDivisi Onkologi Departemen Ilmu Kebidanan Dan Kandungan Fakultas Kedokteran Universitas Indonesia / RS Cipto Mangunkusumo, Jakarta, Indonesia
PENDAHULUAN
Laparoskopik miomektomi (LM) adalah prose-dur yang kurang invasif untuk tatalaksana mi-oma. Tindakan ini membutuhkan ahli bedah dengan ketrampilan yang khusus dan sudah terlatih. Dari penelitian yang sudah dilakukan, LM memberikan beberapa keuntungan seperti perawatan di rumah sakit yang lebih singkat, penyembuhan post-operative yang lebih cepat, dan kehilangan darah lebih sedikit daripada ab-dominal miomektomi.
Namun, kerugian besar yang dapat ditimbulkan oleh miomektomi adalah risiko terjadinya perle-katan pasca-operasi. Perleperle-katan ini dapat mem-pengaruhi fertilitas, meningkatkan rasa sakit, dan meningkatkan risiko kehamilan ektopik. Sekarang ini terdapat operasi yang diasistensi oleh robot dan merupakan salah satu inovasi terbaru dengan tindakan invasif minimal.
Peng-gunaan sistem robotik pada operasi ginekologi ini baru digunakan di Amerika pada tahun 2005. Nama sistem robotik ini adalah da Vinci. Banyak dokter bedah menggunakan teknologi da Vinci ini untuk menggantikan laparoskopi konven-sional karena keuntungan pada instrumentasi pergelangan tangan pada teknologi ini. Selain itu, penggunakan gambar 3 dimensi, ergono-mik, dan kontrol kamera otomatis menjadi ke-unggulan lain dari teknologi da Vinci ini. Lagi pula banyak dokter bedah dengan kemampuan laparoskopi yang terbatas dapat dengan sukses mengganti laparotomi dengan operasi invasif minimal dengan sistem da Vinci ini.
A. Miomektomi dengan teknik laparoskopik
Laparoskopik miomektomi, walaupun mu-dah dikerjakan tapi adalah prosedur yang me-nyebabkan banyak perdarahan, terutama pada kasus dimana mioma sangat besar. Oleh karena
itu, kontrol perdarahan sangatlah penting. Pem-berian obat-obatan sebelum miomektomi se-perti, gonadotropin-releasing hormone agonist, infiltrasi miometrium dengan vasopresin, dan ligasi arteri miometrial terbukti efektif mengu-rangi kehilangan darah saat operasi.1
Dengan cara-cara diatas akan dibutuhkan pengeluaran yang besar. Oleh karena itu, Lee menyarankan metode pre-operatif yang lebih efektif untuk mengontrol perdarahan, yaitu: 2 ampul oksitosin (10 IU/ml/ampul) dimasuk-kan ke larutan saline (1000 ml), yang diberidimasuk-kan dengan kecepatan 40 mIU/menit. Oksitosin langsung berfungsi pada myometrium melalui reseptor pada sel otot polos, yang menyebab-kan kontraksi uterus dan menurunmenyebab-kan perfusi uterus.2
B. Kontraindikasi dari Laparoskopik Miome-ktomi
Kontraindikasinya, antara lain: leiomioma yang difus; fibroid dengan jumlah lebih dari 3 dan masing-masing berukuran lebih dari 7 cm; uku-ran uterus yang lebih dari 20 minggu; adanya 1 fibroid yang lebih dari 15 cm; dan wanita yang menginginkan histerektomi; serta kondisi me-dis yang tidak cocok untuk anestesia umum.2
C. Keuntungan dan kerugian
Laparoskopik miomektomi (LM) adalah prose-dur yang kurang invasif untuk tatalaksana mi-oma. Tindakan ini membutuhkan ahli bedah dengan ketrampilan yang khusus dan sudah terlatih. Dari penelitian yang sudah dilakukan, LM memberikan beberapa keuntungan seperti perawatan di rumah sakit yang lebih singkat, penyembuhan post-operative yang lebih cepat, dan kehilangan darah lebih sedikit daripada ab-dominal miomektomi.3 Waktu yang dibutuhkan untuk operasi ini bervariasi. Fibroid bertangkai dengan ukuran 8-10 cm dapat diangkat dalam waktu beberapa menit, sedangkan fibroid in-tramural yang besar dapat menghabiskan be-berapa jam untuk mengangkat dan memper-baiki uterus. Hasil penelitian menunjukkan LM memerlukan waktu operasi rata-rata yang lebih lama. Peningkatan waktu operasi ini terutama
pada fibroid dengan konsistensi yang lunak, jumlah yang lebih dari 4 dan ukuran yang lebih dari 6 cm. Penelitian lain menunjukkan bahwa waktu operasi yang lebih lama dan perubahan operasi ke laparotomi yang lebih banyak ber-hubungan dengan penggunaan GnRH pada LM disebabkan oleh kesulitan dalam bidang pem-bedahan (cleavage planes).4 Penelitian yang dilakukan oleh Trivedi et al memberikan hasil bahwa risiko konversi ke laparotomi meningkat hampir tiga kali lipat jika ukuran fibroid lebih dari sebelas sentimeter atau terletak di anterior.5 Terdapat keterbatasan dalam LM dan sebagian besar adalah masalah teknik. Mioma yang ter-letak pada lokasi tertentu sulit untuk diangkat. Ketika mioma ukurannya besar atau multipel, atau keduanya, waktu operasi dan jumlah darah yang hilang mungkin tidak bisa diterima. Jika mioma tertanam secara mendalam pada mio-metrium, perbaikan yang rapi terhadap dinding uterus akan sulit dan ruptur uterus dapat terjadi pada kehamilan selanjutnya. Oleh karena ruptur uterus pernah dilaporkan pada pasien-pasien yang dilakukan LM, kehamilan harus dimonitor sama seperti pasien yang dilakukan abdominal miomektomi.4
Kerugian besar yang dapat ditimbulkan oleh miomektomi adalah risiko terjadinya perlekatan pasca-operasi. Perlekatan ini dapat mempen-garuhi fertilitas, meningkatkan rasa sakit, dan meningkatkan risiko kehamilan ektopik. Bebera-pa penelitian mendemonstrasikan penurunan risiko perlekatan ketika laparoskopik menggan-tikan laparotomi. Tinjauan literatur menunjuk-kan bahwa angka rata-rata perlekatan pasca operasi setelah LM adalah 41% dan lebih dari 90% pada laparotomi.4 Barrier dianggap dapat mencegah atau secara bermakna mengurangi insiden terjadinya perlekatan pasca-operasi.5 LM dapat menjadi pilihan bagi wanita dengan fibroid dan infertilitas. Trivedi et al melapor-kan peningkatan angka kehamilan pada wanita yang sebelumnya infertil dengan mioma yang dilakukan operasi menggunakan LM. Peningka-tan sampai 50% kehamilan dicapai dengan fer-tilisasi invitro dengan cara donor oosit. Dari se-mua kehamilan, 64% dilakukan operasi caesar,
31% dilahirkan secara normal, dan 5% abortus. Tidak ada kasus ruptur uterus yang dilaporkan pada penelitian tersebut.5
D. Miomektomi dengan teknik robotik Laparoskopi Robotik
Pada tahun 1992, sistem robotik pertama kali dipasarkan untuk penggunaan komersial, yaitu ROBODOC. Ini adalah sebuah desain lengan robot dan digunakan pada operasi ortopedik panggul. ROBODOC mampu membuat irisan dengan ketepatan yang tinggi pada os. femur untuk menyisipkan implan berdasarkan memori 3 dimensi foto CT.6
Namun penggunaan sistem robotik pada ope-rasi ginekologi ini baru digunakan di Amerika pada tahun 2005.7 Operasi yang diasistensi oleh robot ini merupakan salah satu inovasi terbaru dengan tindakan invasif minimal.8 Nama sistem robotik ini adalah da Vinci. Banyak dokter be-dah menggunakan teknologi da Vinci ini un-tuk menggantikan laparoskopi konvensional karena keuntungan pada instrumentasi per-gelangan tangan pada teknologi ini. Selain itu, penggunaan gambar 3 dimensi, ergonomik, dan kontrol kamera otomatis menjadi keunggulan lain dari teknologi da Vinci ini. Lagi pula banyak dokter bedah dengan kemampuan laparoskopi yang terbatas dapat dengan sukses mengganti laparotomi dengan operasi invasif minimal den-gan sistem da Vinci ini.7
Sebenarnya keuntungan yang paling bermak-na pada sistem robotik ini adalah visualisasi 3 dimensi, keakuratan yang baik, dan gerakan seperti pergelangan tangan pada lengan robot ini yang memberikan gerakan yang cakap.6 Ka-rena tindakan invasif yang minimal maka dapat terjadi pemulihan yang lebih cepat dengan rasa sakit yang lebih minimal, kehilangan darah yang lebih minimal, dan perawatan rawat inap post-operative menjadi lebih singkat.
Namun laparoskopi yang diasistensi robot ini membutuhkan ketrampilan khusus dan tidak mudah untuk dilakukan dalam waktu yang sing-kat, apalagi pada mioma uteri yang besar dan multiple.9
Di Amerika, sistem da Vinci ini digunakan pada berbagai macam bidang diantaranya ginekolo-gi, urologinekolo-gi, operasi general, dan bedah thoraks. Lebih dari 645 sistem da Vinci digunakan di se-luruh dunia dan diantaranya sekitar 41 sistem da Vinci digunakan di Asia. Di Korea, sistem da Vinci pertama kali digunakan di Universitas Yonsei pada tahun 2005 untuk berbagai macam bidang seperti ginekologi, urologi, operasi general, dan bedah thoraks. Untuk bidang ginekologi sendiri sistem da Vinci ini digunakan untuk berbagai spesialisasi diantaranya operasi pada kanker endometrium, mioma uteri, adenomyosis, hi-perplasia endometrium, neoplasia servikal in-traepitelial.6
Laparoskopi Robotik dengan Sistem da Vinci
Sistem da Vinci adalah alat bantu pada operasi laparoskopi yang terdiri dari tiga komponen utama, yaitu:10
1. Tempat Operator (Surgeon Console)
Komponen ini terletak agak jauh, sekitar be-berapa kaki dari tempat tidur pasien. Bahkan menurut teori, komponen ini diletakkan di ruangan lain yang berdampingan dengan ru-angan operasi. Operator yang duduk di tem-pat tersebut akan mampu untuk mengontrol alat-alat robotik, sebuah kamera, dan sebuah sumber energi yang terdapat di pasien dengan bantuan alat penglihatan stereoskopik, mani-pulator tangan, dan pedal kaki.
2. Sistem Penglihatan (InSite® Vision System)
Komponen ini menyediakan gambaran tiga dimensi melalui endoskop berukuran 12 mm. Sebuah endoskop berukuran 5 mm juga terse-dia tapi hanya menyeterse-diakan gambaran dua di-mensi. Oleh karena itu biasanya yang diapakai adalah endoskop ukuran 12 mm.
3. Patient-side Cart: Lengan Robotik dan Endo Wrist® Instrument
Komponen ini terletak di dekat pasien. Saat ini sistemnya tersedia baik dengan tiga lengan atau empat lengan. Satu lengan berguna
un-tuk memegang endoskop sedangkan dua atau tiga tangan lainnya berguna unun-tuk memegang EndoWrist® Instruments, yang berukuran 5 mm atau 8 mm. EndoWrist® Instruments ini merupakan alat yang unik karena kurang memberikan rangsang balik taktil pada operator. Namun, instrument tersebut mempunyai mekanisme gerakan menyerupai pergelangan tangan yang memungkinkan gerakan ke tujuh sudut yang berbeda, sehingga dapat menirukan gerakan-gerakan tangan opera-tor. Selain itu, juga dapat mengeliminasi efek titik tumpu yang ditemukan pada operasi laparoskopi konvensional.
EndoWrist® Instruments
Alat–alat EndoWrist® yang multifungsional ini terdiri dari forsep disektor (dissecting forceps), gun-ting panas (hot shear), tenakulum (tenaculum), dan penggerak jarum (mega needle driver). Alat-alat ini memungkinkan dilakukannya teknik miomektomi yang aman dan efisien dengan pergantian alat minimal. Keuntungan forsep disektor adalah kemampuannya untuk memfasilitasi proses enukleasi sambil menyediakan kontrol balik secara aktif selama pengaliran tenaga keluaran sedang berlang-sung. Pada akhirnya, penggunaan alat-alat tersebut dapat meningkatkan homeostasis dengan pe-nyebaran panas minimal, perlengketan jaringan minimal, dan juga pemanasan alat yang minimal.10
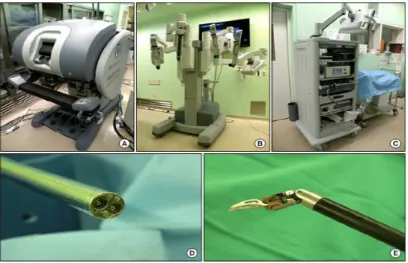
Gambar 1. (A) Tempat operator/Surgical console (B) Lengan robotic/Robotic arms (C) Sistem penglihatan/Visual cart (D) Endoskop 3 dimensi (E) EndoWrist® Instruments.
Gambar 2. (Kiri) Gerakan EndoWrist® Instruments yang menyerupai gerakan pergelangan tangan. (Kanan) EndoWrist® Instruments yang terdiri dari : 1. tenakulum (tenaculum), 2. forsep disektor (dis-secting forceps), 3. penggerak jarum (mega needle driver), 4. gunting panas (hot shear).
Ada satu penelitian yang dilakukan oleh Bedient dkk. untuk membandingkan pasien yang dioperasi miomektomi dengan teknik robotik dan pasien yang dioperasi dengan teknik laparoskopi konven-sional. Teknik robotik yang dimaksud adalah sistem da Vinci. Ada 81 pasien yang diteliti secara re-trospektif, dimana 40 pasien menjalani operasi robotik dan sisanya 41 orang menjalani operasi lapa-roskopi konvensional. Data-data yang dikumpulkan termasuk usia, indeks berat badan, gejala gejala yang timbul, karakteristik fibroid (jumlah, berat, lokasi, dan temuan patologis), lama operasi, per-darahan, komplikasi, dan lama perawatan setelah operasi. Pasien-pasien yang menjalani laparoskopi konvensional mempunyai ukuran uterus dan fibroid yang lebih besar serta jumlah fibroid yang lebih banyak. Dari hasil penelitian tersebut, ada perbedaan yang signifikan bahwa komplikasi intraoper-atif lebih sedikit pada pasien yang dioperasi dengan teknik robotik. Namun, bila disesuaikan dengan ukuran uterus, ukuran fibroid, dan jumlah fibroid, maka tidak ada perbedaan yang signifikan antara kelompok pasien miomektomi yang dioperasi dengan teknik robotik dan teknik laparoskopi konven-sional dalam hal lama operasi, perdarahan, komplikasi intraoperatif dan setelah operasi dan rawat inap lebih dari 2 hari.11
Akan tetapi, penelitian tersebut hanya memberikan gambaran hasil dalam jangka pendek saja. Dampak yang terjadi setelah jangka waktu yang lama, seperti jumlah kehamilan, ruptur uterus, dan komplikasi-komplikasi dari adhesi/perlengketan tidak dapat diteliti karena jumlah pasien yang menginginkan kehamilan sedikit dan durasi follow-up yang pendek. Meskipun komplikasi setelah operasi lebih sedikit pada pasien miomektomi robotik, namun perbedaan tersebut tidak signifikan secara statistik.11
KESIMPULAN
Walaupun teknik robotik lebih baik daripada laparotomi, tapi tidak demikian bila dibandingkan de-ngan laparoskopi konvensional. Teknik robotik mungkin mempunyai beberapa keuntude-ngan diban-dingkan dengan laparoskopi konvensional untuk pasien-pasien yang menjalani operasi histerektomi yang sederhana dan radikal. Teknik robotik ini dapat mengatasi kesulitan-kesulitan pada operasi mi-omektomi dengan teknik laparoskopi konvensional, seperti penggunaan alat-alat yang kaku untuk melepaskan pseudokapsul dan kesulitan dalam melakukan penjahitan yang kuat lapis demi lapis pada insisi uterus. Selain itu, dengan adanya teknik robotik, beberapa keterbatasan pada teknik lapa-roskopi konvensional, seperti tremor, gambaran 2 dimensi, dan posisi berdiri operator yang lebih lama dapat diatasi.
1. Wang CJ, Yuen LT, Han CM, Kay N, Lee CL, Soong YK. A tran-sient blocking uterine perfusion procedure to decrease operative blood loss in laparoscopic myomectomy. Chang Gung Med J 2008;31:463–8.
2. CL Lee, CJ Wang. Laparoscopic Myomectomy. Taiwan Jour-nal Obstetric and Gynecologic 2009 Des; 48(4):335-341 3. HJ Yoon, MS Kyung, US Joong, JS Choi. Laparoscopic
Momectomy for Large Myomas. J Korean Med Sci 2007; 22: 706-12
4. Rock JA, Jones HW. Te Linde’s Operatif Gynecology. Tenth edition. Philadelphia: Lippincott Williams & Wilkins, a Wolters Kluwer Business; 2008.
5. Trivedi P, Abreo M. Predisposising Factors for Fbroids and Outcome of Laparoscopic Myomectomy in Infertility. Jour-nal of Gynecological Endoscopy and Surgery 2010 Jan-Jun; 1(1):47-56
6. YT Kim, SW Kim, YW Jung. Robotic Surgery in Gynecologic Field. Yonsei Med J 2008;49(6):886-890
daftar pustaka
7. Holloway RW, Patel SD, Ahmad S. Robotic Surgery in Gy-necology. Scandinavian journal of Surgery 2009;98:96-109
8. Nezhat C, Saberi NS, Shahmohamady B, Nezhat F. Ro-botic-Assisted Laparoscopy in Gynecological Surgery. Journal of the Society of Laparoendoscopic Surgeons 2006;10:317-320
9. SP Mao, HC Lai, FW Chang, MH Yu, CC Chang.Laparos-copy-Assisted Robotic Myomectomy Using the Da Vinci System. Taiwan J Obstetric Gynecology 2007;46(2):174-176
10. Senapati S, Advincula AP. Surgical techniques : robot-assisted laparoscopic myomectomy with the da Vinci surgical system. J Robotic Surgery 2007; 1:69-74. 11. Bedient CE, Magrina JF, Noble BN, Kho RM. Comparison
of robotic and laparoscopic myomectomy. American Journal of Obstetric and Gynecology. December 2009; 201:566-627.