PENGENDALI KECEPATAN ANGIN DENGAN METODE
PROPORSIONAL
TUGAS AKHIR
Diajukan Untuk Memenuhi Salah Satu Syarat Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
Oleh:
Nama : Hari Wibowo NIM : 025114060
PROGRAM STUDI TEKNIK ELEKTRO
JURUSAN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
WIND VELOCITY CONTROLLER WITH
PROPORTIONAL METHOD
Presented as Partial Fulfillment of the Requirements To Obtain the Sarjana Teknik Degree
In Electrical Engineering Study Program
By:
Name : Hari Wibowo Student Number : 025114060
ELECTRICAL ENGINEERING STUDY PROGRAM
DEPARTMENT OF ELECTRICAL ENGINEERING
FACULTY OF ENGINEERING
SANATA DHARMA UNIVERSITY
YOGYAKARTA
2007
HALAMAN PERNYATAAN KEASLIAN KARYA
“Saya menyatakan dengan sesungguhnya bahwa tugas akhir yang saya tulis ini tidak memuat karya atau bagian karya orang lain,
kecuali yang telah disebutkan dalam kutipan dan daftar pustaka, sebagaimana layaknya karya ilmiah.”
Yogyakarta,……Juli 2007
HALAMAN PERSEMBAHAN
Kupersembahkan karya tulis ini kepada :
Allah Swt,
yang selalu melindungi dirikuBapak dan Ibu
Tercinta atas semangat, doa, serta dukungan secara moril maupun materiilSaudara dan saudariku tercinta
Bayu, Beni
danAnnisa
Almamaterku TeknikElektro
, khususnya angkatan2002
HALAMAN MOTTO
Orang melupakan secepat apa anda menyelesaikan pekerjaan, tetapi mereka akan mengingat sebaik apa anda melakukannya.
Rintangan adalah hal-hal yang kita lihat ketika kita mengalihkan mata kita dari tujuan kita.
Segala yang telah terjadi adalah suatu pembelajaran dan jangan berhenti belajar hingga ajalmu tiba.
Tataplah besok adalah awal dari hari – hari kesuksesan kamu dan segera songsong masamu.
Pengendali Kecepatan Angin Berbasis Proporsional Nama : Hari Wibowo
NIM : 025114060
INTISARI
Tugas akhir ini mendeskripsikan tentang Pengendali Kecepatan Angin Berbasis Proporsional yang menggunakan motor DC yang dimodifikasi untuk memperoleh kecepatan angin yang stabil.
Pengendali Kecepatan Angin Berbasis Proporsional diimplementasikan dengan menggunakan metode Ziegler-Nichols. Masukan dari pengendali Proporsional adalah selisih tegangan antara set point dengan feedback ( sensor ). Dari hasil selisih itu kemudian digunakan untuk mengendalikan kecepatan motor DC yang akan berakibat pada angin yang dihasilkan. Pada implementasi, terdapat 2 nilai level tegangan ( Set
Point ) dengan besar tegangan yang berbeda-beda. Pemilihan level tegangan dilakukan
dengan menekan tombol pemilih.
Pengendali Kecepatan Angin Berbasis Proporsional telah diimplementasikan dan dilakukan pengujian. Hasil yang diperoleh adalah jika pengujian pada malam hari dan siang hari mengalami perbedaan yaitu, nilai resistansi pada rangkaian sensor dan waktu untuk memperoleh Td, Tr, Ts. Selain itu diperoleh jika system ini sangat terpengaruh oleh adanya gangguan dari faktor luar, yaitu cahaya ( baik lampu maupun matahari ) dan angin.
Kata kunci : Pengendali Kecepatan Angin Berbasis Proporsional, level tegangan, terkendali Proporsional kalang tertutup
WIND VELOCITY CONTROLLER WITH PROPORTIONAL METHOD Name: Hari Wibowo
NIM: 025114060
ABSTRACT
This final project describes “ Wind Velocity Controller With Proportional Method
” using modified DC motor to get stable wind velocity. Wind Velocity Controller With Proportional Method is implemented by using Ziegler-Nichols method. Input of
proportional control is the difference between set point and feedback (censor). The difference is used to control DC motor velocity which result in the wind produced. In the implementation, there are 2 different voltage level. The selection of voltage level is done by pressing the selection button.
Wind Velocity Controller With Proportional Method has been implemented and tested. The result, testing in the night is different from testing taken in the day light. The different is at the resistance value on censor circuit and the time to get td, tr, ts. Besides that, this system is highly affected by the distraction of external factors such as light ( the light of a lamp or even sunlight ) and wind.
Key word : Wind Velocity Controller With Proportional Method, voltage level, Proportional Controled close loop
KATA PENGANTAR
Puji syukur penulis panjatkan kepada Allaw Swt, karena atas rahmat dan hidayah-Nya penulis akhirnya dapat menyelesaikan tugas akhir ini dengan baik dan lancar.
Dalam proses penulisan tugas akhir ini penulis menyadari bahwa ada begitu banyak pihak yang telah memberikan perhatian dan bantuan dengan caranya masing-masing sehingga tugas akhir ini dapat terselesaikan. Oleh karena itu penulis ingin mengucapkan terima kasih antara lain kepada :
1. Allah Swt, karena lindunganNya hingga hari ini penulis dapat menikmati segala bentuk ciptaanNya
2. Bapak dan Ibu serta saudara saudariku tercinta atas semangat, doa serta dukungan secara moril maupun materiil.
3. Bapak Ir. Greg. Heliarko, S.J., S.S., B.S.T., M.A., M.Sc., selaku dekan fakultas teknik.
4. Bapak Bayu Primawan, S.T., M.Eng., selaku ketua jurusan teknik elektro
5. Ibu B. Wuri Harini, S.T., M.T., selaku pembimbing I atas ide-ide yang berguna, bimbingan, dukungan, saran dan kesabaran bagi penulis dari awal sampai tugas akhir ini bisa selesai.
6. Bapak Ir. Tjendro, selaku pembimbing II yang telah bersedia meluangkan waktu serta memberikan bimbingan dan saran yang tentunya sangat berguna untuk tugas akhir ini.
7. Seluruh dosen Teknik Elektro atas ilmu yang telah diberikan selama penulis menimba ilmu di Universitas Sanata Dharma.
8. M. Kristina Kurniati, S.T., Pacarq yang selalu memberikan dukungan dan support moril walau sering kali lewat sms saja karena keberadaan kamu yang jauh dari sisiq. 9. Dominicus Yoga “ Tcus “ Kristawan yang selama pengerjaan TA selalu memberi ide
– ide dan pemecahan masalah serta terima kasih atas kerja samanya.
10. Teman-teman satu bimbingan TA: Lele, Dani, Yoga, Sinung , Deri, Plentonk, Andek, Widi, Clement, Gepeng, Cino.
11. Teman-teman elektro’02 : Dika, Robi, Pandu, Oscar, Wuri, Andis, serta teman-teman angkatan ’02 lainnya yang selalu berbagi cerita dan bersama dalam kuliah. 12. Mas Sur, Mas Mardi, Mas Broto selaku laboran yang telah mengizinkan membuka
Lab sewaktu-waktu jika diperlukan untuk mengambil data
13. Dan seluruh pihak yang telah ambil bagian dalam proses penulisan tugas akhir ini yang terlalu banyak jika disebutkan satu-persatu.
Dengan rendah hati penulis menyadari bahwa tugas akhir ini masih jauh dari sempurna, oleh karena itu berbagai kritik dan saran untuk perbaikan tugas akhir ini sangat diharapkan. Akhir kata, semoga tugas akhir ini dapat bermanfaat bagi semua pihak. Terima kasih.
Yogyakarta, 18 Desember 2006
DAFTAR ISI
Halaman
JUDUL…………....I
HALAMAN PERSETUJUAN………...III
HALAMAN PENGESAHAN………....IV
HALAMAN PERNYATAAN KEASLIAN KARYA………...V
HALAMAN PERSEMBAHAN……….VI
HALAMAN MOTTO………....VII
INTISARI………...VIII
ABSTRACT………...IX
KATA PENGANTAR………....X
DAFTAR ISI………...XII
DAFTAR GAMBAR………...XV
DAFTAR TABEL………...XVI
BAB 1 PENDAHULUAN
1.1 Latar Belakang ………1
1.2 Tujuan dan Manfaat……….2
1.3 Batasan Masalah………..2
1.4 Metodologi Penelitian………..3
1.5 Sistematika Penulisan...4
BAB II. DASAR TEORI 2.1 Definisi – Definisi………...6 2.2 Pengendali………...6 2.3 Resistor……….…...10 2.4 IC ( Integrated Circuit )……….…...….10 2.4.1 Konstruksi IC………..11 2.4.2 Bentuk IC………...….11 2.4.3 Jenis IC………...…….12
2.6 Set Point………...……..13
2.7 Pendeteksi Error………...14
2.8 Penggerak Motor………..……..14
2.9 Sensor………...15
2.9.1 Fototransistor………..….15
2.9.2 Led Infra Red………...16
2.11 Aktuator……….……...17
2.12 Umpan Balik……….18
2.13 Metode Ziegler Nichols………19
2.14 Tanggapan Sistem...22
BAB III. RANCANGAN PENELITIAN 3.1 Rancang Bangun Plant……….……..24
3.2 Perancangan………....26 3.2.1 Set Point……….…..26 3.2.2 Pengendali Proporsional………...28 3.2.3 Penggerak Motor………..31 3.2.4 Pendeteksi error………...32 3.2.5 Umpan Balik………32
BAB IV. HASIL PENGAMATAN DAN PEMBAHASAN 4.1 Kinerja Plant………..….34
4.2 Data Pengamatan dan Analisis………35
4.2.1 Analisis Data Pada Malam Hari………...35
4.2.1.1 Analisis pada level tegangan 1………..36
4.2.1.2 Analisis pada level tegangan 2………..38
4.2.2 Analisis Data Pada Siang Hari………...41
4.2.2.2 Analisis pada level tegangan 2………..44 4.2.3 Analisis Data Berdasar Perbedaan Intensitas Cahaya...48
BAB V. PENUTUP
5.1. Kesimpulan………...………49 5.2. Saran……….………49
DAFTAR PUSTAKA LAMPIRAN
DAFTAR GAMBAR
Halaman
Gambar 2.1 Diagram blok Pengendali Proporsional………7
Gambar 2.2 Proportional Band dari kontroler proporsional tergantung pada penguatan………...8
Gambar 2.3 Rangkaian Pengendali Proposional……….…...9
Gambar 2.4 Rangkaian Pembagi Tegangan ………..13
Gambar 2.5 Rangkaian Penguat Beda………....14
Gambar 2.6 Rangkaian Penguat Arus………15
Gambar 2.7 Fototransistor………..………...16
Gambar 2.8 Led Infra Red………..………....17
Gambar 2.9 Bentuk Fisik Aktuator………..………..17
Gambar 2.10 Rangkaian penjumlah………..………...18
Gambar 2.11 Kurva respons tangga satuan yang memperlihatkan 25 % lonjakan maksimum………..………19
Gambar 2.12 Respon tangga satuan system………..…….……….20
Gambar 2.13 Kurva Respons berbentuk S………..……..…..20
Gambar 2.14 Kurva Respon ………..……….22
Gambar 3.1 Rancang Bangun Plant………...…..………..………..25
Gambar 3.2: Diagram Blok Perancangan………..……….26
Gambar 3.3 Set Point level tegangan 1………....……….28
Gambar 3.4 Set Point level tegangan 2……...………..……...28
Gambar 3.6 Rangkaian Proporsional Penguatan 8 Kali……….…...…31
Gambar 3.7 Rangkaian Penguat Arus……….………..………31
Gambar 3.8 Rangkaian Pendeteksi Error……….……….…....…32
Gambar 4.1 Grafik level tegangan 1 pada intensitas 27 lux....……….37
Gambar 4.2 Respon pada data malam level tegangan 1……….….….38
Gambar 4.3 Grafik level tegangan 2 pada intensitas 27 lux.…...…....40
Gambar 4.4 Respon pada data malam level tegangan 2……….……..…41
Gambar 4.5 Grafik level tegangan 1 pada intensitas 235 lux.……….……43
Gambar 4.6 Respon pada data siang level tegangan 1……….………44
Gambar 4.7 Grafik level tegangan 2 pada intensitas 235 lux………...46
DAFTAR TABEL
Halaman
Tabel 2.1. Penalaan paramater PID dengan metode kurva reaksi………....21
Tabel 2.2. Penalaan paramater PID dengan metode osilasi………...22
Tabel 3.1. Data Plant dengan T = 60s……….……….…26
Tabel 3.2. Data kecepatan berbanding waktu pada tegangan masukan 3Volt……..29
Tabel 4.1. Data pada level tegangan 1 malam hari..………..………..…….36
Tabel 4.2. Data pada level tegangan 2 malam hari...…………..………39
Tabel 4.3. Data pada level tegangan 1 siang hari……….………42
Tabel 4.4. Data pada level tegangan 2 siang hari……….………45
BAB I
PENDAHULUAN
1.1 Latar Belakang
Dalam keseharian sering ditemukan suatu sistem yang menggunakan pengendali, terlebih di dunia Industri. Di dalam dunia industri yang berperan penting adalah sistem kontrol yang mempunyai kontribusi yang besar terhadap perilaku sistem. Pada umumnya para manusia atau operator pada sistem kendali hanya dapat mengetahui beberapa tombol – tombol yang berfungsi sebagai set point, padahal jika mau mengkaji lebih dalam lagi sistem yang dioperasikan tersebut merupakan suatu sistem yang selalu didasari atas tinjauan terhadap karakteristik yang diatur ( Plant ).
Di dunia industri banyak ditemui mesin – mesin yang berdaya besar. Salah satu kesulitan yang dihadapi adalah mengendalikan laju kecepatan angin, contohnya blower. Mesin – mesin yang menggunakan angin biasanya dalam pengaturan kecepatan menggunakan cara manual seperti pada bagian masukan angin diberi penghalang yang berefek suplai masukan menjadi berkurang sehingga keluaran angin menjadi berkurang pula. Maka saat ini penulis mencoba merancang dan membuat alat yang dapat menunjukkan pengendali kecepatan angin secara DC.
Pengendali feedback yang biasa dipakai adalah pengendali kontinyu PID (Proporsional Integral Diferensial). Salah satu metode perancangan pengendali PID adalah metode Ziegler-Nichols yaitu metode yang didasarkan pada reaksi plant yang dikenai perubahan. Demikian juga dengan Tugas Akhir yang akan ditempuh oleh penulis menggunakan metode penalaan P ( Proporsional ) berdasarkan eksperimen.
1.2 Tujuan dan Manfaat
Tujuan dari penulisan skripsi ini adalah mengatur kecepatan angin pada kipas dengan pengendali P yang dirancang berdasarkan eksperimen.
Manfaat yang dapat dicapai dalam penelitian ini yaitu diperoleh kecepatan angin yang konstan.
1.3 Batasan Masalah
Agar tidak meluas dalam pembahasan,maka penulisan skripsi ini dibatasi pada masalah – masalah yang berhubungan dengan alat yang dibuat yang meliputi :
a. Dasar – dasar kerja perangkat penimbul angin 1. Aktuator dapat menghasilkan angin
2. Nilai – nilai kecepatan angin pada tegangan tertentu b. Rangkaian dari pengendali kecepatan angin
1. Cara kerja dari rangkaian yang digunakan 2. Masalah yang terjadi dalam rangkaian 3. Komponen penunjang proses pembuatan alat
a. Resistansi
b. Integrated Circuit ( IC ) c. Motor DC 12V
d. Penalaan Proporsional berdasar eksperimen dan kurva reaksi dari
plant
1.4 Metodologi Penelitian
Sistem pembahasan tidak jauh berbeda dengan metodologi yang digunakan dan penulis membagi menurut urutan kejadian dan waktunya menjadi langkah – langkah :
1.4.1 Mengumpulkan Referensi
Pada bagian ini penulis mencari gambaran dan gagasan yang akan dibuat dalam pengajuan judul TA. Dalam penelitian ini penulis menentukan judul selalu konsultasi dengan dosen pembimbing dan teman - teman kuliah.
1.4.2 Mengajukan Judul
Penulis mengajukan judul pada bulan Oktober dan disetujui dengan rentang penulisan proposal selama 6 bulan.
1.4.3 Membuat Plant
Dikarenakan Tugas Akhir menggunakan sistem penalaan eksperimen maka penulis membuat Plant terlebih dahulu agar diketahui karakteristik dari Plant dan menjadikan acuan dalam pembuatan pengendalinya.
1.4.4 Mengambil Data Plant
Penulis akan mengambil data sementara dari Plant dengan menggunakan masukan dari adaptor.
1.4.5 Merancang Pengendali
Pada bagian ini akan dibuat perancangan dari rangkaian – rangkaian yang akan digunakan dalam sistem dengan nilai komponen yang akan digunakan.
1.4.6 Implementasi Pengendali
Setelah diuji dan layak untuk dilanjutkan, maka pada bagian ini penulis akan mengimplementasikan rancangan yang sudah dibuat ketika penulisan proposal.
1.4.8 Menguji Alat
Penulis akan menguji dari hasil implementasi perancangan dan membandingkan antara hasil perancangan dengan hasil implementasi.
1.4.9 Menganalisa dan Mengambil Kesimpulan
Penulis akan menganalisa dari data yang sudah diperoleh ketika melakukan uji alat kemudian dari analis tersebut akan diambil kesimpulan mengenai alat yang sudah dibuat.
1.4.10 Menulis Laporan
Setelah diperoleh hasil dari alat yang dibuat maka penulis akan menulis laporan yang berisi mengenai hasil keseluruhan dari tugas akhir.
1.5 Sistematika Penulisan
Sistem pembahasan tidak jauh berbeda dengan metodologi yang digunakan dan penulis membagi pembahasan menurut metodologinya seperti berikut :
BAB I. Pendahuluan
Pada bab ini berisikan mengenai penjelasan latar belakang masalah, maksud dan tujuan, batasan masalah, yang menjelaska tentang rancangan system yang akan dibuat, serta menjelaskan sistematika pembahasan
BAB II. Dasar Teori
Pada bab ini berisi tentang teori dan pemilihan komponen yang nantinya digunakan dalam implementasi alat yang akan dikerjakan.
BAB III. Rancangan Penelitian
Pada bab ini berisikan mengenai bagaimana memperoleh nilai – nilai komponen yang akan digunakan dan pertimbangan dari pemilihan komponen tersebut.
BAB IV. Hasil Pengamatan dan Pembahasan
Berisi mengenai bagaimana hasil dari kerja alat yang dibuat dan menganalisis data yang diperoleh.
BAB V. Kesimpulan dan Saran
Pada bab ini berisikan kesimpulan dari hasil perancangan dan implementasinya serta saran agar baik kedepannya.
BAB II
DASAR TEORI
2.1 Definisi – Definisi
Sebelum masuk ke hal yang lebih mendalam, perlu diketahui beberapa istilah – istilah yang perlukan untuk menjelaskan sistem kontrol tersebut.
“Plant”. Plant adalah seperangkat peralatan yang digunakan untuk melakukan suatu operasi atau kontrol tertentu .
“Proses”. Proses adalah operasi atau perkembangan alamiah yang berlangsung secara terus menerus yang ditandai oleh suatu deretan perubahan kecil yang berurutan dengan cara yang relatif tetap dan menuju ke suatu hasil atau keadaan akhir tertentu [ 1 ].
“Sistem”. Sistem adalah kombinasi dari beberapa komponen yang bekerja bersama – sama dan melakukan suatu sasaran tertentu [ 2 ].
“Gangguan”. Gangguan adalah suatu sinyal yang cenderung mempunyai pengaruh yang merugikan pada harga keluaran sistem.
“Sistem Kontrol Berumpan Balik”. Berumpan balik adalah sistem kontrol yang cenderung menjaga hubungan yang telah ditentukan antara keluaran dan masukan acuan dengan membandingkannya dan menggunakan selisihnya sebagai alat pengontrolan.
2.2 Pengendali
Pengendali adalah elemen yang mendeteksi perbedaan antara keluaran dengan nilai input, sedangkan pengendali automatik membandingkan harga yang sebenarnya dari keluaran “ plant “ dengan harga yang diinginkan, menentukan deviasi, dan menghasilkan suatu sinyal kontrol yang akan memperkecil deviasi sampai nol atau harga yang kecil.
Di dalam Pengendali automatik di industri dapat diklasifikasikan sesuai dengan aksi pengontrolannya sebagai berikut :
1. Pengendali Proporsional 2. Pengendali Integral
3. Pengendali Proporsional dan Integral 4. Pengendali Proporsional dan Diferensial
5. Pengendali Proporsional, Integral, dan Diferensial
Disini penulis akan menggunakan metode Pengendali Proporsional. Pengendali Proporsional memiliki keluaran yang sebanding dengan besarnya sinyal kesalahan (selisih antara besaran yang diinginkan dengan harga keluarannya) [ 1 ]. Secara lebih sederhana dapat dikatakan, bahwa keluaran Pengendali Proporsional merupakan perkalian antara konstanta Proporsional dengan masukannya. Perubahan pada sinyal masukan akan segera menyebabkan sistem secara langsung mengubah keluarannya sebesar konstanta pengalinya.
Dalam gambar 2.1 ditunjukkan blok diagram yang menggambarkan hubungan antara besaran setting, besaran aktual dengan besaran keluaran Pengendali Proporsional.
Gambar 2.1 Diagram blok Pengendali Proporsional
Sinyal kesalahan (error) merupakan selisih antara besaran setting dengan besaran aktual. Selisih ini akan mempengaruhi pengendali, untuk mengeluarkan sinyal positif (mempercepat pencapaian harga setting) atau negatif (memperlambat tercapainya harga yang diinginkan).
Pengendali Proporsional memiliki 2 parameter, Pita Proporsional (Proportional
Band) dan Konstanta Proporsional. Daerah kerja pengendali efektif dicerminkan oleh
Pita Proporsional [1], sedangkan Konstanta Proporsional menunjukkan nilai faktor penguatan terhadap sinyal kesalahan, Kp.
Hubungan antara Pita Proporsional (PB) dengan Konstanta Proporsional (Kp)
ditunjukkan secara prosentase oleh persamaan berikut: % 100 1 x Kp PB= ………. (2.1)
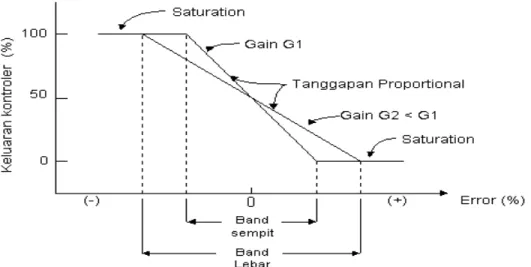
Dalam gambar 2.2 ditunjukkan grafik hubungan antara PB, keluaran kontroler dan kesalahan yang merupakan masukan pengendali.
Gambar 2.2 : Proportional Band dari kontroler proporsional tergantung pada penguatan.
Ketika Konstanta Proporsional bertambah semakin tinggi, Pita Proporsional menunjukkan penurunan yang semakin kecil, sehingga lingkup kerja yang dikuatkan akan semakin sempit [ 1 ].
Ciri-ciri pengendali Proporsional harus diperhatikan ketika pengendali tersebut diterapkan pada suatu sistem. Secara eksperimen, pengguna pengendali Proporsional harus memperhatikan ketentuan-ketentuan berikut ini:
1 Jika nilai Kp kecil, pengendali Proporsional hanya mampu melakukan koreksi
kesalahan yang kecil, sehingga akan menghasilkan respon sistem yang lambat.
2. Jika nilai Kp dinaikkan, tanggapan sistem menunjukkan semakin cepat
mencapai keadaan mantapnya.
3. Namun jika nilai Kp diperbesar sehingga mencapai harga yang berlebihan,
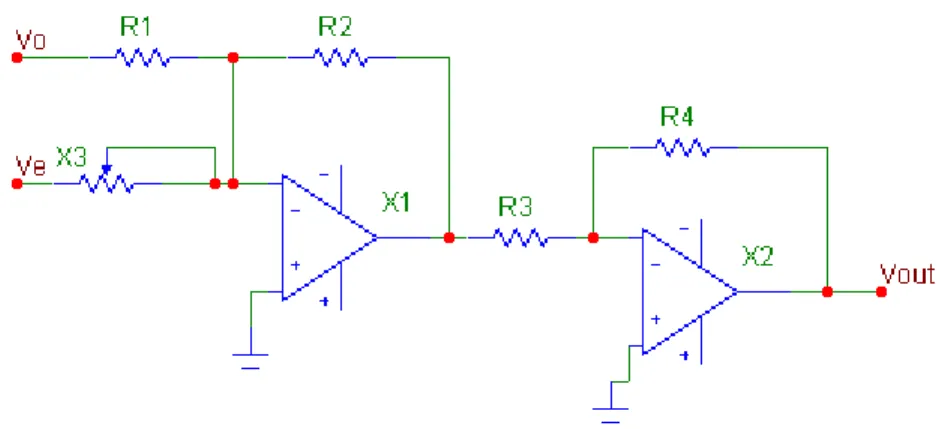
akan mengakibatkan sistem bekerja tidak stabil, atau respon sistem akan berosilasi [ 1 ]. Gambar 2.3 merupakan rangkaian inverting yang diinvertingkan yang dapat digunakan menjadi rangkaian pengendali Proporsional.
Gambar 2.3 : Rangkaian Pengendali Proposional
Dari gambar 2.3 diatas diperoleh persamaan
Vo Ve Gp
Vout= . + ….……. (2.2) Dengan
Vout = Tegangan output Ve = Error Voltage
Vo = Keluaran Tanpa error Gp = R2 / R1
2.3 Resistor
Resistor adalah komponen elektronika yang sering dijumpai karena komponen ini berguna untuk menahan sejumlah arus dan tegangan listrik baik AC maupun DC. Satuan untuk resistor dinyatakan dalam Ohm dengan simbol ( Ω ).
Efek seperti desah ditimbulkan oleh gerak acak elektron dalam material resistor. Resistor dapat diukur sebagai tegangan dengan dinyatakan dalam volt.
Resistor ada 2 jenis yaitu resistor yang mempunyai harga mati ( tetap ) dan resistor yang dapat diubah – ubah ( variable ).
Resistor dapat dikelompokkan berdasarkan toleransinya : 1. keperluan umum bertoleransi 5% atau lebih 2. setengah presisi bertoleransi antara 1% hingga 5% 3. presisi bertoleransi 0.5% hingga 1%
4. ultra presisi bertoleransi kurang dari 0.5%
2.4 IC ( Integrated Circuit )
Komponen IC termasuk kelompok semikonduktor [5]. Integrated circuit atau yang lebih dikenal sebagai IC, kemajuannya sangat pesat. Hal ini tidak mengherankan, karena IC adalah salah satu jenis komponen semikonduktor yang penggunaannya sangat luas sekali. Rangkaian terpadu IC merupakan gabungan dari beberapa rangkaian elektronika yang disusun dalam kemasan semikonduktor yang kecil dan ringan. Jadi di dalam sebuah IC terdapat ribuan dioda, resistor, transistor, dan kapasitor.
2.4.1 Konstruksi IC
a. IC Monolitik
IC ini dibuat dari keping semikonduktor yang tipis. Kaki – kaki IC disambung dengan menggunakan ultrasonic dan dikontrol dengan mikroskop.
b. IC Hibrid
Bentuk IC ini lebih besar dari IC monolitik. IC ini terbuat dari PCB yang disketsa dengan sistem fotografimikro, yang kemudian dipasang semikonduktor atau komponen lain pada PCB tersebut.
2.4.2 Bentuk IC
Rangkaian terpadu IC dikemas dengan berbagai macam bahan dan bentuk, ada yang dimasukkan dalam silinder kaleng atau plastik. Biasanya IC memiliki kaki 10 atau 12 buah.
Pada umumnya IC modern dibentuk dari kemasan DIP (Dual Inline Package) dan berbentuk persegi. Kemasan ini memiliki kaki – kaki dua baris sejajar. Umumnya DIP memiliki 8, 14, atau 16 bahkan ada yang 40 kaki.
2.4.3 Jenis IC
Dilihat dari fungsinya,rangkaian terpadu atau IC dibagi atas tiga jenis, yaitu : a. IC Linier
IC linier berfungsi sebagai penguat daya. Ciri – ciri IC linier adalah pada kode huruf yang terdapat pada badan IC, biasanya didahului dengan huruf – huruf FSA, AN, BA, CA, LM, STK dan sebagainya.
b. IC TTL ( Transistor Transtor Logic )
pengukuran Digital. Ciri – ciri IC TTL adalah pada angka yang terdapat pada badan IC, biasanya didahului dengan angka 74, 78, atau 54.
c. IC CMOS
IC CMOS memiliki fungsi yang sama dengan IC TTL, namun dalam prakteknya IC CMOS lebih baik dibandingkan IC TTL. Ciri – ciri IC CMOS adalah didahului oleh angka seperti 26, 40, 41, 44, atau 48
2.5 Penguat Operasional ( OP Amp )
Penguat operasional yang ideal mempunyai karakteristik sebagai berikut : 1. Resistansi masukan = ∞
2. Resistansi keluaran = 0 3. Perolehan tegangan Av = -∞ 4. Lebar bidang frekuensi = ∞
5.Tegangan keluaran Vo = 0, jika kedua masukan pada ujung inverting dan non inverting sama
6. Tidak hanyut (drift) oleh perubahan suhu
Di dalam penulisan tugas akhir ini penulis menggunakan penguat operasional dengan seri LM324. Penulis memilih LM324 karena didalam 1 bentuk IC terdapat 4 penguat operasional sehingga akan lebih praktis tempat dan pada LM324 ini sumber yang digunakan hanya Vcc sedangkan Vee dapat ditanahkan.
2.6 Set Point
Fungsi dari set point pada penelitian ini adalah sebagai pengeset kecepatan angin yang diinginkan sehingga kipas atau fan akan bergerak sesuai kecepatan yang diinginkan dengan menggunakan nilai keluaran berupa tegangan
Gambar 2.4 merupakan rangkaian Set Point
Gambar 2.4 : Rangkaian Pembagi Tegangan
Dari gambar 2.4 diatas diperoleh persamaan
Vcc R R R Vout . 1 2 2 + = ………. (2.3) 2.7 Pendeteksi Error
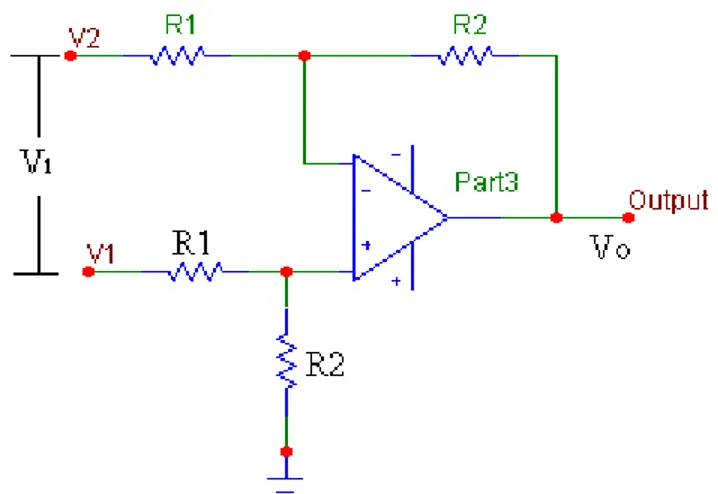
Pendeteksi error yang digunakan adalah penguat beda. Penguat beda memiliki 2 masukan yang berasal dari set point dan dari nilai feedback sistem.
Gambar 2.5 menunjukkan rangkaian penguat beda
Dari gambar 2.5 diatas diperoleh persamaan 2 1 V V Vi= − ……… (2.4) dengan Vi = Tegangan Masukan Maka Vi R R Vo 1 2 = ……….. (2.5) 2.8 Penggerak Motor
Penggerak motor diperlukan untuk menggerakkan motor DC. Penggerak motor yang digunakan adalah penguat arus karena arus yang keluar dari pengendali Proposional hanya kecil dan kurang kuat untuk memutar motor DC pada tegangan yang relatif kecil.
Gambar 2.6 : Rangkaian Penguat Arus
Dari gambar 2.6 diatas diperoleh persamaan
... ... ... ... 0 . = − − Vce IERmotor Vcc (2.6) Maka Rmotor Vce Vcc IE= − ...………. (2.7)
2.9 Sensor
Sensor adalah bagian yang pertama kali menerima tenaga dari media yang diukur dan menghasilkan perubahan keluaran yang bergantung pada atau memiliki hubungan tertentu dengan besaran yang diukur.
Sensor yang digunakan dalam tugas akhir ini adalah Led Infra Red sebagai pemancar dan fototransistor sebagai penerima.
2.9.1 Fototransistor
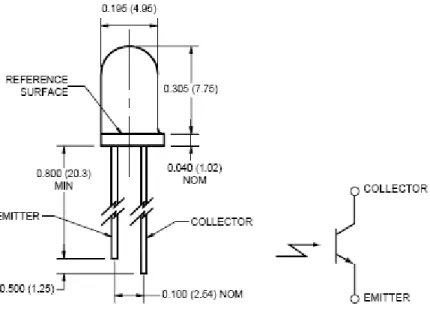
Fototransistor yang paling sering dijumpai adalah transistor bipolar NPN dengan sambungan kolektor – basis PN yang peka terhadap cahaya. Apabila sambungan dikenai cahaya melalui lensa yang membuka pada bungkus transistor, maka timbul aliran arus kendali yang menghidupkan transistor ON. Gambar 2.7 menunjukkan bentuk fisik dari Fototransistor.
Gambar 2.7 : Fototransistor
2.9.2 Led Infra Merah
Led Infra Merah merupakan bagian dari pemancar atau sebagai sumber cahaya bagi Fototansistor. Led Infra merah memiliki banyak jenis terutama jika dibedakan dari
bahan dasar pembentuknya. Fototransistor akan aktif apabila terkena cahaya dari Led Infra Merah.
Antara Led dan foto transistor dipisahkan oleh jarak. Jauh dekatnya jarak mempengaruhi besar intensitas cahaya yang diterima oleh Fototransistor. Gambar 2.8 menunjukkan bentuk fisik dari Led Infra Merah.
Gambar 2.8: Led Infra Merah
2.11 Aktuator
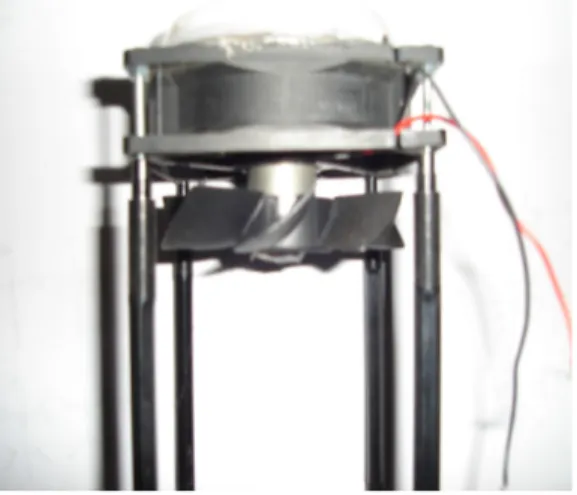
Aktuator adalah alat yang mengolah tegangan keluaran dari penggerak motor menjadi energi tertentu. Aktuator yang digunakan adalah motor DC yang kemudian di modifikasi dengan cara dipasang baling – baling, digunakan aktuator ini karena angin yang dihasilkan lebih kuat dibandingkan Fan DC. Gambar 2.9 menunjukkan bentuk fisik dari aktuator yang akan digunakan dalam penelitian.
2.12 Umpan Balik
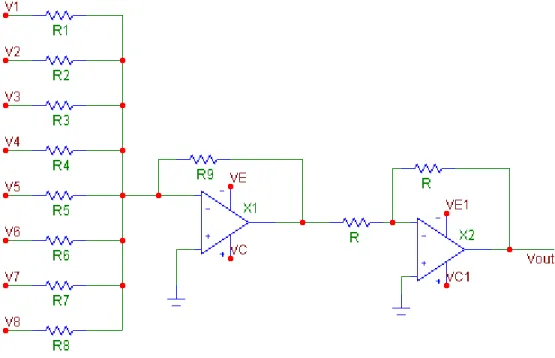
Dikarenakan keluaran sensor yang berbeda antara sensor satu dengan sensor yang lainnya maka digunakan rangkaian penjumlah yang akan menjadikan nilai umpan balik.Gambar 2.10 menunjukkan rangkaian penjumlah
Gambar 2.10 : Rangkaian penjumlah
Dari gambar 2.10 di atas diperoleh persamaan
8 8 9 7 7 9 6 6 9 5 5 9 4 4 9 3 3 9 2 2 9 1 1 9 V R R V R R V R R V R R V R R V R R V R R V R R Vo= − − − − − − − − ……...(2.8) Dengan R1 = R2 = R3 = R4 = R5 = R6 = R7 = R8 = R9 Maka ) 8 7 6 5 4 3 2 1 (V V V V V V V V Vo= − + + + + + + + ………...…... (2.9)
Dari nilai Vo kemudian masuk kedalam rangkaian Inverting yang akan menyebabkan nilai menjadi
) 8 7 6 5 4 3 2 1 (V V V V V V V V Vo= + + + + + + + ……….(2.10)
2.13 Metode Ziegler Nichols
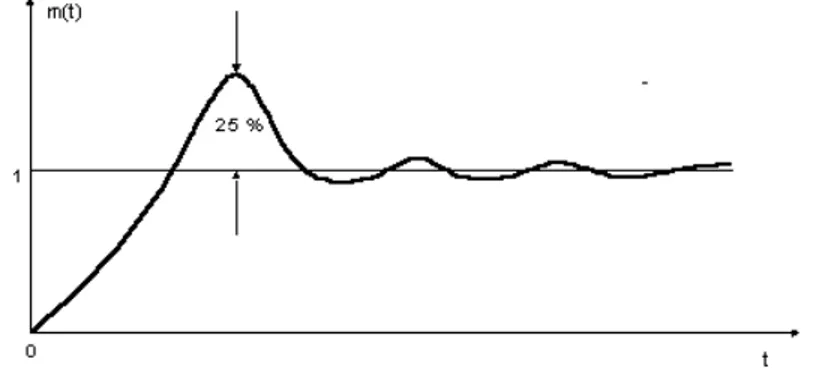
Ziegler-Nichols pertama kali memperkenalkan metodenya pada tahun 1942 [1]. Metode ini memiliki dua cara, metode osilasi dan kurva reaksi. Kedua metode ditujukan untuk menghasilkan respon sistem dengan lonjakan maksimum sebesar 25%. Gambar 2.11 memperlihatkan kurva dengan lonjakan 25%.
Gambar 2.11 : Kurva respons tangga satuan yang memperlihatkan 25 % lonjakan maksimum
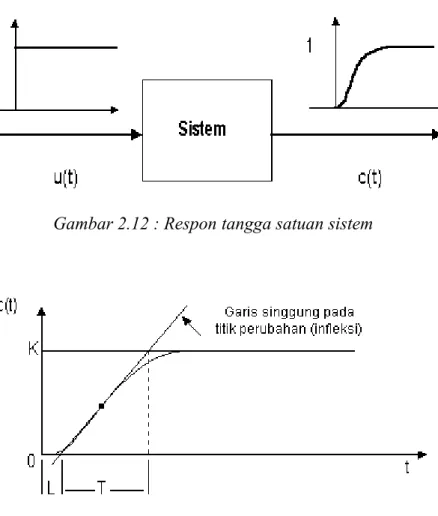
Pada penulisan Tugas Akhir penulis menggunakan metode kurva reaksi. Metode ini didasarkan terhadap reaksi sistem untaian terbuka. Plant sebagai untaian terbuka dikenai sinyal fungsi tangga satuan (gambar 2.12). Kalau plant minimal tidak mengandung unsur integrator ataupun pole-pole kompleks, reaksi sistem akan berbentuk S. Gambar 2.13 menunjukkan kurva berbentuk S tersebut.
Kelemahan metode ini terletak pada ketidakmampuannya untuk plant integrator maupun plant yang memiliki pole kompleks.
Gambar 2.12 : Respon tangga satuan sistem
Gambar 2.13 : Kurva Respons berbentuk S.
Kurva berbentuk-s mempunyai dua konstanta, waktu mati (dead time) L dan waktu tunda T. Dari gambar 2.13 terlihat bahwa kurva reaksi berubah naik, setelah selang waktu L. Sedangkan waktu tunda menggambarkan perubahan kurva setelah mencapai 66% dari keadaan mantapnya. Pada kurva dibuat suatu garis yang bersinggungan dengan garis kurva. Garis singgung itu akan memotong dengan sumbu absis dan garis maksimum. Perpotongan garis singgung dengan sumbu absis merupakan ukuran waktu mati, dan perpotongan dengan garis maksimum merupakan waktu tunda yang diukur dari titik waktu L.
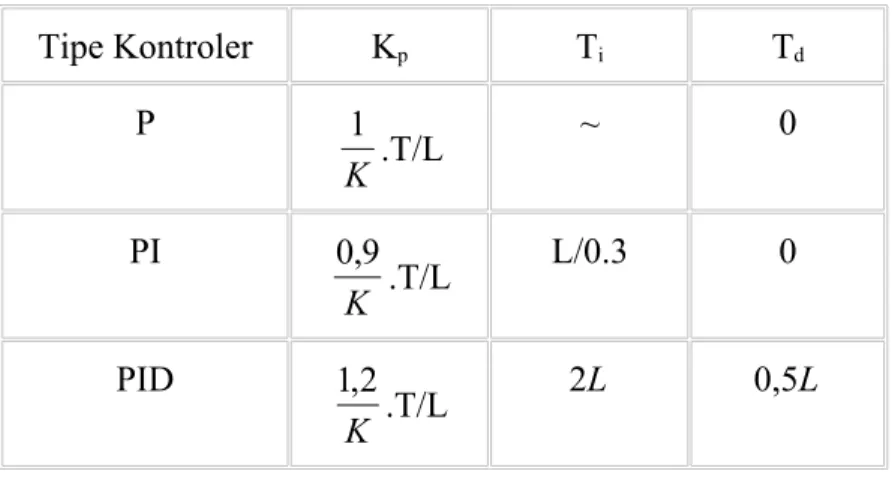
Penalaan parameter PID didasarkan perolehan kedua konstanta itu. Zeigler dan Nichols melakukan eksperimen dan menyarankan parameter penyetelan nilai Kp, Ti, dan
Td dengan didasarkan pada kedua parameter tersebut. Tabel 2.1 merupakan rumusan penalaan parameter PID berdasarkan cara kurva reaksi.
Tabel 2.1.Penalaan paramater PID dengan metode kurva reaksi
Tipe Kontroler Kp Ti Td P K 1 .T/L ~ 0 PI K 9 , 0 .T/L L/0.3 0 PID K 2 , 1 .T/L 2L 0,5L
Sedangkan pada metode osilasi didasarkan pada reaksi sistem untaian tertutup. Penalaan parameter PID didasarkan terhadap kedua konstanta hasil eksperimen, Ku dan Pu. Ziegler dan Nichols menyarankan penyetelan nilai parameter Kp, Ti, dan Td
berdasarkan rumus yang diperlihatkan pada Tabel 2.2.
Tabel 2.2 Penalaan paramater PID dengan metode osilasi
Tipe Kontroler Kp Ti Td
P 0,5.Ku
PI 0,45.Ku 1/2 Pu
Gambar 2.14 menggambarkan kurva reaksi untaian tertutup ketika berosilasi.
Gambar 2.14 : Kurva Respon
2.14 Tanggapan Sistem
Tanggapan sistem kontrol sering menunjukkan osilasi teredam sebelum mencapai keadaan tunak. Dalam menentukan karakteristik tanggapan system control terhadap masukan tanggan satuan, biasanya dicari parameter berikut :
1. Waktu Tunda ( Delay Time ), td
Yaitu waktu yang diperlukan tanggapan mencapai setengah harga akhir yang pertama kali.
2. Waktu Naik ( Rise Time ), tr
Yaitu waktu yang diperlukan tanggapan untuk naik dari 10% hingga 90%. 3. Waktu Penetapan ( Settling Time ), ts
Yaitu waktu yang diperlukan kurva tanggapan dan menetap dalam daerah disekitar harga akhir yang ukurannya ditentukan dengan persentase mutlak dari harga akhir ( biasanya 98% ).
BAB III
RANCANGAN PENELITIAN
Pada bab ini berisi tinjauan komponen yang akan digunakan dalam pembuatan alat, diagram blok dari rancangan yang akan dibuat disertai penjelasan umum dari blok tersebut dan persamaan matematis yang mendukung.
Rangkaian elektronika yang digunakan merupakan rangkaian elektronika biasa yang menggunakan komponen elektronika seperti Resistor, IC, Dioda, Led Infra merah,
Fototransistor dll. Komponen ini dirangkai sedemikian rupa sehingga membentuk suatu
rangkaian yang dapat berfungsi sebagai saklar yang mampu meng-ON-kan aktuator.
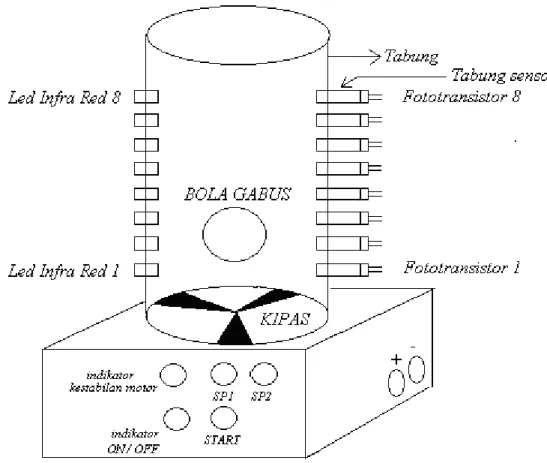
3.1 Rancang Bangun Plant
Gambar 3.1 menunjukkan rancang bangun Plant yang akan dibuat dalam penelitian ini dan cara kerjanya adalah Plant akan berfungsi jika pada tombol start di ON kan, kemudian kita dapat memilih berapa kecepatan yang diinginkan pada SP1 / SP2. Kipas akan berputar dengan kecepatan sesuai set point dan angin yang ditimbulkan akan menyebabkan bola gabus akan bergerak ke atas yang dijadikan sebagai penghalang pada sensor, dalam gerakannya bola gabus akan menutupi 1 sensor yang jika nilai keluaran dari sensor belum sama dengan set point maka bola gabus akan terus naik ke atas hingga mencapai ketinggian yang sesuai dengan sensor yang memiliki keluaran yang sama dengan set point.
Gambar 3.1: Rancang Bangun Plant
Dalam Plant digunakan bola gabus yang mempunyai diameter bola 7Cm yang dibuat dari dasar gabus. Jarak antara sensor satu dengan yang lainnya adalah 10Cm, dan terdapat 8 sensor Led Infra Merah dan 8 sensor Fototransistor. Jarak antar sensor 10 Cm karena selain mengguakan tabung juga di pasang srubung pada fototransistor. Pemasangan sensor pertama pada ketinggian 21Cm, selanjutnya jarak antara sensor satu dengan yang lain berjarak 8 Cm.
Di dalam Plant juga terdapat 2 led yang digunakan sebagai indikator. Indikator yang pertama adalah indikator ON / OFF, led akan menunjukkan jika ada sudah terhubung dengan jala – jala PLN maka led akan ON. Sedangkan indikator kedua adalah indikator kestabilan motor, led indikator kedua akan menunjukkan jika tegangan yang diinginkan belum tercapai maka led akan ON begitu sebaliknya dan jika tegangan motor sudah sama dengan tegangan yang diinginkan maka led akan ON.
3.2 Perancangan
Gambar 3.2 menunjukkan diagram blok dari perancangan alat yang hendak dikerjakan.
Gambar 3.2: Diagram Blok Perancangan
3.2.1 Set Point
Fungsi dari set point adalah sebagai pengeset pada kecepatan berapa angin yang diinginkan sehingga kipas fan akan bergerak sesuai kecepatan yang diinginkan. Pada tabel 3.1 menunjukkan data yang diperoleh dari plant dengan masukan adaptor, dengan masukan yang berubah – ubah pada tegangan masukan kipas berbanding lurus dengan kecepatan angin yang di ukur dengan anemometer.
Tabel 3.1: Data Plant dengan T = 60s
Tegangan (V) 2,4 2,5 2,6 2,7 2,8 2,9 3,0 3,1 3,2 3,3 3,4 Kecepatan angin (m/s) 1,9 2 2,1 2,1 2,2 2,3 2,4 2,4 2,5 2,6 2,6 Penulis menginginkan kecepatan angin pada kecepatan 2,2 m/s yang ditunjukkan dengan level tegangan sebesar 2,8 Volt ( level tegangan 1 ) dan kecepatan 2,5 m/s yang ditunjukkan dengan level tegangan 3,2 Volt ( level tegangan 2 ) dan kecepatan tersebut dapat dipilih pada SP1 untuk kecepatan 2,2m/s dan SP2 untuk kecepatan 2,5m/s, maka
dengan menggunakan persamaan (2.3) diperoleh persamaan Vcc R R R Vout . 1 2 2 + = dengan
masukan nilai Vcc = 12 Volt maka didapat : - Untuk set point : 2,8 Volt
12 . 1 2 2 8 , 2 R R R + = ; dipilih R2 = 1KΩ 12 . 1 1 1 8 , 2 R K K + = K R K 2.8 1 12 8 , 2 + = 8 , 2 8 , 2 12 1 K K R = − K R1= 3,2857 Ω
Karena tidak ada di pasaran maka nilai R1 digunakan trimpot yang diukur resistansinya sesuai dengan nilai di atas.
- Untuk set point : 3.2 Volt 12 . 1 2 2 2 , 3 R R R + = ; dipilih R2 = 1KΩ 12 . 1 1 1 2 , 3 R K K + = K R K 3,2 1 12 2 , 3 + = 2 , 3 2 , 3 12 1 K K R = − K R1= 2,75 Ω
Karena tidak ada di pasaran maka nilai R1 digunakan trimpot yang diukur resistansinya sesuai dengan nilai di atas.
Dari perhitungan maka dapat digambarkan rangkaian set point yang ditunjukkan pada gambar 3.3 untuk nilai 2,8 Volt dan gambar 3.4 untuk nilai 3,2 Volt
Gambar 3.3 : Set Point level tegangan 1
Gambar 3.4 : Set Point level tegangan 2
3.2.2 Pengendali Proporsional
Penulis dalam melakukan perancangan berdasarkan kurva reaksi pada Gambar 3.5 yang didapat dari data Plant dan ditunjukkan pada tabel 3.2.
Nilai penguatan diperoleh dengan cara menggunakan tabel penalaan parameter PID metode kurva reaksi yang di temukan oleh Ziegler-Nichols.
Tabel 3.2 : Data kecepatan berbanding waktu pada tegangan masukan 3Volt
m/s 0,2 0,4 0,6 0,7 0,9 1,1 1,2 1,4 Waktu (s) 1,78 2 2,62 3,12 3,65 3,90 4,32 4,81 m/s 1,6 1,7 1,9 2 2,1 2,2 2,3 2,4 2,4 Waktu (s) 5,06 5,68 6 7,31 8,57 9,62 10,84 30,53 60
Gambar 3.5 : Kurva reaksi pada tegangan masukan 3Volt
Dengan mengacu pada gambar 2.14 maka didapatkan rumus untuk pengendali Proporsional : 0 3 t t T = − = 7,4s – 1s = 6,4s 0 0− = t L = 1s – 0 = 1s L T K Kp= 1 . m Cs K ∆ ∆ = Cs∆ = 2,4 m/s – 0 m/s = 2,4 m/s m ∆ = 3 V – 0 V = 3 V Dengan Cs
∆ = perubahan nilai pada kurva
m
Dari persamaan tabel 2.1 ( baris 2 kolom 2 ) dan data pada kurva reaksi maka didapatkan 3 4 , 2 = K 8 , 0 = K 1 4 , 6 . 8 , 0 1 = Kp ; T = 6,4s dan L = 1s 8 = Kp
maka dengan menggunakan persamaan Kp = R2 / R1, dengan Gp = 8 didapat :
1 2 R R Kp= ; dipilih R1 = 1KΩ K R 1 2 8= K R2= 8 Ω
Gambar 3.6 menunjukkan pengendali Proporsional dengan penguatan 8 kali
Gambar 3.6 : Rangkaian Proporsional Penguatan 8 Kali
3.2.3 Penggerak Motor
Pada penggerak motor transistor yang digunakan di rangkaian penguat arus oleh penulis digunakan transistor BD139, karena BD139 merupakan transistor jenis NPN dengan nilai rentang HFE yang relatif besar yaitu antara 40 hingga 250.
Dari persamaan ( 2.7 ) maka diperoleh
5 , 16 5 , 0 12− = IE = 0,697 A
Jadi dengan arus pada motor DC sebesar 0,697 A dan sudah dapat untuk menggerakkan motor dc tersebut
Gambar 3.7 : Rangkaian Penguat Arus
3.2.4 Pendeteksi error
Pada penguat beda diinginkan agar terjadi penguatan sebesar 1 maka
dengan persamaan (2.5) diperoleh persamaan Vi R R Vo 1 2 = dengan Av = 1 maka Av = 1 Av = 1 2 R R 1 = 1 2 R R ; dipilih R1 = 1KΩ R1 = R2 = R3 = R4 = 1KΩ
Dari perhitungan diatas maka dapat digambarkan rangkaian penguat beda yang ditunjukkan pada gambar 3.8
Gambar 3.8 : Rangkaian Pendeteksi Error
3.2.5 Umpan Balik
Karena plant menggunakan 1 sensor yang akan terkena penghalang dan mengeluarkan nilai sebagai masukan rangkaian penjumlah dan mempunyai jarak pasang antara Led Infra Red dan Fototransistor sejauh 10cm maka dengan menggunakan data dari lampiran 1. Untuk menentukan nilai resistansi pada nilai 2,8Volt dan 3,2Volt digunakan persamaan (2.9)
- Pada 2,8Volt
Sensor yang aktif adalah sensor 3
) 8 7 6 5 4 3 2 1 (V V V V V V V V Vo= − + + + + + + + ) 0 0 0 0 0 8 . 2 0 0 ( + + + + + + + − = Vo 8 , 2 − = Vo Volt
Dengan persamaan (2.10) maka nilai yang didapat adalah 2,8 Volt - Pada 3,2Volt
Sensor yang aktif adalah sensor 7
) 8 7 6 5 4 3 2 1 (V V V V V V V V Vo= − + + + + + + + ) 0 2 , 3 0 0 0 0 0 0 ( + + + + + + + − = Vo
2 , 3 − = Vo Volt
Dengan persamaan (2.10) maka nilai yang didapat adalah 3,2 Volt
Jika bola gabus menghalangi sensor yang lain maka nilai keluaran dari umpan balik adalah nilai – nilai tegangan keluaran sensor yang terhalang tersebut, dan jika bola gabus tidak menghalangi sensor manapun maka nilai tegangan keluaran adalah 0 Volt. Nilai – nilai tegangan keluaran tiap sensor dapat diketahui pada lampiran 1.
BAB IV
HASIL PENGAMATAN DAN PEMBAHASAN
Pada bab ini akan ditunjukkan hasil pengamatan dan pembahasan dari Pengendali Kecepatan Angin dengan metode Proporsional. Pengujian dilakukan dengan cara memilih level kecepatan yang sudah ditentukan melalui set point. Pada level kecepatan 1 adalah tegangan 2,8 Volt dan pada level kecepatan 2 adalah tegangan 3,2 Volt. Pada hardware terdapat indikator jika motor DC sudah stabil.
Pengambilan data yang digunakan oleh penulis adalah dengan cara merekam perubahan tegangan dari Plant yang diukur dengan multimeter digital, kemudian dengan menggunakan windows media player dapat dilihat perubahan tegangan pada multimeter digital setiap detiknya, karena pencatatan data dengan melihat setiap detiknya pada windows media player dan dari multi yang juga dilihat pada rekaman. Cara pengambilan data tersebut dilakukan karena perubahan yang terjadi sangat cepat dan akan sangat susah jika pengukuran dilakukan secara manual.
4.1 Kinerja Plant
Pada Plant yang dibuat terdapat 8 sensor yang terdiri dari 8 Led Infra Merah dan 8 Fototransistor. Tiap – tiap sensor memiliki nilai output yang berbeda karena sensor digunakan untuk nilai umpan balik. Nilai tegangan dari sensor 1 ke sensor selanjutnya semakin meningkat / membesar. Semua nilai tegangan sensor akan dijumlah pada blok rangkaian umpan balik. Jika sensor tidak terhalang maka sensor tidak mengeluarkan nilai tegangan.
Tabung pada Fototransistor digunakan sebagai alat yang memfokuskan cahaya dari Led Infra Merah dan digunakan untuk mengurangi gangguan cahaya dari luar, seperti cahaya matahari dan cahaya lampu.
Kecepatan motor DC diatur sehingga sesuai dengan nilai set point yang diinginkan. Pada sistem ini, jika keluaran plant sama dengan set point, yang berarti
error nol, kecepatan motor akan dipertahankan. Hal ini berarti bahwa pada saat error nol
motor DC memperoleh masukan tegangan tertentu (bukan nol). Oleh karena itu, error perlu ditambah dengan offset yang kemudian dikalikan dengan penguatan Kp. Kecepatan motor akan menjadi cepat jika nilai yang dihasilkan oleh sensor masih lebih kecil daripada nilai set point dan bola gabus yang digunakan sebagai penghalang sensor akan naik. Semakin mendekati nilai set point, kecepatan motor semakin lambat. Jika nilai tegangan sensor lebih besar maka motor akan mati dan bola gabus akan turun. Kejadian itu akan terus berlanjut hingga bola gabus stabil pada level tegangan yang diharapkan dan motor akan mempunyai kecepatan yang menghasilkan angin secara stabil.
4.2 Data Pengamatan dan Analisis
Pada bagian ini akan ditunjukkan data pengamatan dan analisis dari sistem yang bekerja ketika kondisi malam hari dengan intensitas cahaya sebesar 27 lux dan pada kondisi siang hari dengan intensitas cahaya sebesar 235 lux.
4.2.1 Analisis Data Pada Malam Hari
Analisis pada malam hari diperoleh dari data ketika intensitas cahaya sebesar 27 lux. Terdiri dari 2 level tegangan, yaitu level tegangan 1 dan level tegangan 2.
4.2.1.1 Analisis pada level tegangan 1
Pada level tegangan 1 yang ditunjukkan dengan tegangan 2,8 Volt diperoleh nilai data yang mengalami gangguan pada waktu tertentu ketika terjadi gangguan dari faktor luar. Tabel 4.1 menunjukkan data yang diperoleh pada level tegangan 1.
Tabel 4.1 Data pada level tegangan 1 malam hari
Dari data diatas dapat diperoleh Gambar 4.1 yang menunjukkan grafik antara tegangan keluaran sensor berbanding waktu selama 60 detik.
Waktu ( s ) Tegangan sensor ( Volt ) Waktu ( s ) Tegangan sensor ( Volt ) Waktu ( s ) Tegangan sensor ( Volt ) 1 0.01 21 2.53 41 2.56 2 0.02 22 2.43 42 2.56 3 1.46 23 2.89 43 2.58 4 1.83 24 2.54 44 2.58 5 2.85 25 2.55 45 2.58 6 2.64 26 2.75 46 2.58 7 1.86 27 2.88 47 2.58 8 2.88 28 2.38 48 2.59 9 2.50 29 2.56 49 2.55 10 2.53 30 2.56 50 2.57 11 2.84 31 2.56 51 2.54 12 2.39 32 2.56 52 2.58 13 2.53 33 2.75 53 2.58 14 2.88 34 2.47 54 2.58 15 2.53 35 2.76 55 2.58 16 2.56 36 2.59 56 2.58 17 2.37 37 2.81 57 2.58 18 2.28 38 2.55 58 2.58 19 2.54 39 2.57 59 2.58 20 2.55 40 2.56 60 2.58
data malam level tegangan 1 0 1 2 3 0 5 10 15 20 25 30 35 40 45 50 55 60 waktu ( s ) te g an g an s en so r ( V o lt )
Gambar 4.1 : Grafik level tegangan 1 pada intensitas 27 lux
Dari grafik gambar 4.1 dapat diketahui, bahwa sistem akan mulai stabil setelah 44 detik, tetapi disini sistem mengalami gangguan pada waktu tertentu.
Pada level tegangan 1 dapat dikatakan stabil pada tegangan 2,68 Volt dan bola gabus bergerak stabil pada sensor ke 3. Tegangan yang seharusnya diperoleh pada level tegangan 1 adalah 2,8 Volt, karena pengaruh dari sifat pengendali Proporsional, yaitu memiliki kemungkinan terjadi efek stady state yang menyebabkan adanya error pada
nilai yang seharusnya dicapai. Error yang terjadi sebesar 100% 7,86% 8 , 2 58 , 2 8 , 2 − x =
Dari gambar 4.1 diambil bagian awal digunakan untuk mendapatkan gambar 4.2 yaitu gambar yang digunakan untuk perhitungan mencari rise time, delay time dan
gambar 4.2 : Respon pada data malam level tegangan 1
dari gambar 4.2 diperoleh nilai :
98 % terletak pada 2,56284 Volt dan 38,2 s 90 % terletak pada 2,322 Voltdan 4,5 s 50 % terletak pada 1,29 Volt dan 2,9 s 10 % terletak pada 0,258 Volt dan 2,3 s Maka di peroleh
Delay Time ( td ) = 2,9 s Rise Time ( tr ) = 2,2 s Settling Time ( ts ) = 38,2 s
4.2.1.2 Analisis pada level tegangan 2
Pada level tegangan 2 yang ditunjukkan dengan tegangan 3,2 Volt diperoleh nilai data yang mengalami gangguan pada waktu tertentu ketika terjadi gangguan dari faktor luar.
Pada data level tegangan 2 data yang diambil ketika malam hari untuk mencapai nilai kestabilan lebih cepat daripada ketika level tegangan 1 data yang diambil pada malam hari, pada level ini sistem akan mulai stabil setelah 39 detik. Pada data ini juga mengalami gangguan pada nilai kestabilan, ketika mengalami intensitas cahaya yang berbeda maka nilai keluaran sensor akan berbeda sehingga mengalami gangguan.
Intensitas cahaya sangat berpengaruh, ketika fototransistor terkena cahaya maka nilai
tegangan keluaran menjadi lebih kecil jika dibandingkan ketika fototransistor hanya memperoleh cahaya yang minimal. Tabel 4.2 menunjukkan data yang diperoleh pada level tegangan 2.
Tabel 4.2 Data pada level tegangan 2 malam hari
Dari data diatas dapat diperoleh Gambar 4.3 menunjukkan grafik antara tegangan keluaran sensor berbanding waktu selama 60 detik.
data malam level tegangan 2
0 1 2 3 4 5 6 7 0 5 10 15 20 25 30 35 40 45 50 55 60 waktu ( s ) te g an g an s en so r ( V o lt )
Gambar 4.3 : Grafik level tegangan 2 pada intensitas 27 lux
Dari data pada level tegangan 2 dapat dikatakan stabil ketika tegangan 3,12 Volt dan bola gabus bergerak stabil pada sensor ke 7. Tegangan yang seharusnya dicapai ketika level tegangan 2 adalah 3,2 Volt, tetapi pada data ini tidak tercapai karena cara pengambilan data open loop tegangan 3,2 Volt yang sama dengan 2,5 m/s angin yang
Waktu ( s ) Tegangan sensor ( Volt ) Waktu ( s ) Tegangan sensor ( Volt ) Waktu ( s ) Tegangan sensor ( Volt ) 1 0.02 21 3.1 41 3.42 2 1.18 22 3.1 42 3.11 3 2.68 23 3.09 43 3.19 4 2.8 24 5.17 44 3.14 5 2.39 25 4.14 45 3.12 6 5.28 26 3.14 46 3.11 7 2.34 27 2.56 47 3.12 8 2.79 28 6.18 48 3.11 9 2.51 29 2.02 49 3.1 10 3.14 30 6.81 50 3.1 11 3.09 31 2.76 51 3.12 12 3.08 32 2.75 52 3.13 13 3.09 33 2.91 53 3.13 14 3.09 34 2.83 54 3.13 15 3.1 35 3.06 55 3.12 16 3.1 36 3.3 56 3.12 17 3.09 37 3.1 57 3.12 18 3.09 38 3.11 58 3.13 19 3.09 39 3.12 59 2.82 20 3.09 40 3.12 60 3.14
dihasilkan oleh motor DC tidak terbebani oleh bola gabus. Error yang terjadi sebesar % 5 , 2 % 100 2 , 3 12 , 3 2 , 3 = − x
Dari gambar 4.3 diambil bagian awal yang digunakan untuk mendapatkan gambar 4.4 yaitu gambar yang digunakan untuk perhitungan mencari rise time, delay
time dan settling time
dari gambar 4.4 diperoleh nilai :
98 % terletak pada 3,0576 Volt dan 36,9 s 90 % terletak pada 2,808 Volt dan 3,3 s 50 % terletak pada 1,56 Volt dan 2,25 s 10 % terletak pada 0,312 Volt dan 1,3 s
Gambar 4.4 : Respon pada data malam level tegangan 2
Maka di peroleh
Delay time ( td ) = 2,25 s
Rise Time ( tr ) = 2 s Settling Time ( ts ) = 36,9 s
4.2.2 Analisis Data Pada Siang Hari
Analisis pada siang hari diperoleh dari data ketika intensitas cahaya sebesar 235 lux. Terdiri dari level tegangan 1 dan level tegangan 2.
4.2.2.1 Analisis pada level tegangan 1
Pada level tegangan 1 yang ditunjukkan dengan tegangan 2,8 Volt diperoleh nilai data yang mengalami gangguan pada waktu tertentu ketika terjadi gangguan dari faktor luar.
Pada kondisi siang hari sistem mengalami lebih banyak gangguan dari pada ketika sistem berkerja pada kondisi malam hari karena faktor dari intensitas cahaya paling besar mempengaruhi. Pada level tegangan 1 siang hari sistem mulai mengalami kestabilan setelah berkerja selama 27 detik, tetapi pada data yang penulis ambil ini mengalami lebih banyak gangguan dari pada data level tegangan 1 malam hari.
Tabel 4.3 menunjukkan data yang diperoleh pada level tegangan 1.
Tabel 4.3 Data pada level tegangan 1 siang hari Waktu ( s ) Tegangan sensor ( Volt ) Waktu ( s ) Tegangan sensor ( Volt ) Waktu ( s ) Tegangan sensor ( Volt ) 1 0.03 21 2.57 41 2.59 2 0.02 22 2.57 42 2.59 3 2.04 23 2.6 43 2.58 4 2.99 24 2.6 44 2.58 5 2.39 25 2.61 45 2.59 6 2.9 26 2.6 46 2.59 7 1.97 27 2.58 47 2.59 8 2.47 28 2.58 48 2.6 9 2.65 29 2.25 49 2.61 10 2.65 30 1.89 50 2.59 11 2.62 31 2.28 51 2.56 12 2.64 32 2.59 52 2.61 13 1.74 33 2.59 53 2.61 14 2.63 34 2.58 54 2.59 15 2.61 35 2.56 55 2.59 16 5.58 36 2.56 56 2.58 17 2.6 37 1.97 57 2.57 18 2.6 38 2.39 58 2.64 19 1.87 39 2.51 59 2.64 20 2.54 40 2.61 60 2.62
Dari data diatas dapat diperoleh Gambar 4.5 menunjukkan grafik antara tegangan keluaran sensor berbanding waktu selama 60 detik.
data siang level tegangan 1
0 1 2 3 4 5 6 0 5 10 15 20 25 30 35 40 45 50 55 60 waktu ( s ) te g an g an s en so r ( V o lt )
Gambar 4.5 : Grafik level tegangan 1 pada intensitas 235 lux
Dari data pada level tegangan 1 siang hari dapat dikatakan stabil ketika tegangan 2,58 Volt dan bola gabus bergerak stabil pada sensor ke 3. nilai tegangan tidak sama karena adanya gaya tekan dari bola gabus, sehingga bola gabus dapat bergerak stabil pada level tegangan 1 siang hari atau sensor ke 3 dengan tegangan sebesar itu. Selain karena gaya tekan juga disebabkan nilai tegangan 2,8 Volt diperoleh dari pengambilan data secara open loop, sedangkan sistem berjalan secara close loop. Error yang terjadi
sebesar 100% 7,86% 8 , 2 58 , 2 8 , 2 − = x
Dari gambar 4.5 diambil bagian awal digunakan untuk mendapatkan gambar 4.6 yaitu gambar yang digunakan untuk perhitungan mencari rise time, delay time dan
settling time
dari gambar 4.6 diperoleh nilai :
98 % terletak pada 2,5284Volt dan 31,8 s 90 % terletak pada 2,322 Volt dan 3,2 s 50 % terletak pada 1,29 Volt dan 2,6 s 10 % terletak pada 0,258 Volt dan 2,15 s
Gambar 4.6 : Respon pada data siang level tegangan 1
Maka di peroleh
Delay time ( td ) = 2,6 s
Rise Time ( tr ) = 1,05 s Settling Time ( ts ) = 31,8 s
4.2.2.2 Analisis pada level tegangan 2
Pada level tegangan 2 yang ditunjukkan dengan tegangan 3,2 Volt diperoleh nilai data yang mengalami gangguan pada waktu tertentu ketika terjadi gangguan dari faktor luar.
Dari data siang yang diperoleh, kondisi lebih tidak konstan daripada ketika pengambilan data di waktu malam hari, terlebih data pada level tegangan 2 kondisi agar konstan lebih lama didapat. Pada data ini kondisi stabil baru diperoleh setelah 37 detik, tapi ketika detik 12 sudah mencapai nilai stabil yaitu pada tegangan 3,11 Volt. Kondisi stabil level tegangan lebih susah diperoleh karena selain gangguan dari cahaya lampu dan matahari, angin, juga karena letak sensor posisi level tegangan 2 berada pada tabung
Plant yang atas sehingga lebih mudah terkena gangguan. Error yang terjadi sebesar
% 81 , 2 % 100 2 , 3 11 , 3 2 , 3 = − x
Tabel 4.4 menunjukkan data yang diperoleh pada level tegangan 1.
Tabel 4.4 Data pada level tegangan 2 siang hari
Dari data diatas dapat diperoleh Gambar 4.7 menunjukkan grafik antara tegangan keluaran sensor berbanding waktu selama 60 detik.
data siang level tegangan 2
0 1 2 3 4 5 0 5 10 15 20 25 30 35 40 45 50 55 60 waktu ( s ) te g an g an s en so r ( V o lt )
Gambar 4.7 : Grafik level tegangan 2 pada intensitas 235 lux
Dari gambar 4.7 diambil bagian awal yang digunakan untuk mendapatkan gambar 4.8 yaitu gambar yang digunakan untuk perhitungan mencari rise time, delay
time dan settling time Waktu ( s ) Tegangan sensor ( Volt ) Waktu ( s ) Tegangan sensor ( Volt ) Waktu ( s ) Tegangan sensor ( Volt ) 1 0.01 21 2.84 41 3.16 2 0.05 22 3.4 42 3.15 3 2.53 23 3.07 43 3.12 4 2.94 24 2.82 44 3.12 5 3.01 25 2.87 45 3.06 6 3.03 26 2.84 46 3.17 7 2.97 27 2.39 47 3.18 8 2.09 28 3.31 48 3.16 9 2.95 29 2.91 49 3.16 10 2.79 30 2.7 50 3.13 11 2.77 31 4.62 51 3.09 12 3.11 32 3.13 52 3.12 13 2.75 33 4.47 53 3.08 14 3.13 34 4.49 54 2.82 15 2.86 35 3.08 55 3.02 16 4.47 36 3.03 56 3.06 17 2.78 37 3.12 57 3.07 18 2.83 38 3.11 58 3.07 19 2.87 39 3.12 59 3.10 20 2.79 40 3.14 60 3.11
Gambar 4.8 : Respon pada data siang level tegangan 2
dari gambar 4.8 di atas diperoleh nilai : 98 % terletak pada 3,0478 Volt dan 36,25 s 90 % terletak pada 2,799Volt dan 3,6 s 50 % terletak pada 1,555Volt dan 2,25 s 10 % terletak pada 0,311Volt dan 2,1 s Maka di peroleh
Delay Time ( td ) = 2,25 s
Rise Time ( tr ) = 1,5 s Settling Time ( ts ) = 36,25 s
Tabel 4.5 menunjukkan data mengenai Delay Time, Rise Time, dan
Settling Time dari empat data yang sudah diambil.
Tabel 4.5 Data Delay Time, Rise Time, dan Settling Time
Td ( s ) Tr ( s ) Ts ( s ) Level Tegangan 1 ( malam) 2,25 2,2 36,25 Level Tegangan 2 ( malam) 2,25 2 35,1
Level Tegangan 1 ( siang ) 2,6 1,05 31,8 Level Tegangan 2 ( siang ) 2,25 1,5 36,25
Untuk Delay Time antara level 1 dan level 2 baik itu data pada siang hari maupun malam relatif sama yaitu 2,25 s hanya pada level tegangan 1 siang saja yang membutuhkan waktu lebih lama.
Rise Time yang diperlukan pada waktu malam hari antara level 1 dan level 2
mengalami perbedaan yang lebih besar, jika dibandingkan perbandingan Rise Time pada data siang. Waktu yang diperlukan pada data malam hari lebih lama daripada data siang.
Settling Time antara data siang dan malam relatif sama hanya ketika data siang
level tegangan 1 memiliki waktu yang lebih cepat tercapai daripada data yang lain.
4.2.3 Analisis Data Berdasar Perbedaan Intensitas Cahaya
Hardware yang dibuat oleh penulis menggunakan sensor led infra merah dan fototransistor yang dalam cara kerja sangat terpengaruh oleh intensitas cahaya. Dari lampiran 1 pada rangkaian sensor diperoleh:
1.data dengan intensitas cahaya yang lebih besar memiliki nilai resistansi yang lebih besar dibandingkan dengan data dengan intensitas cahaya yang lebih kecil
2.fototransistor terkena cahaya dengan intensitas lebih besar maka dari rangkaian sensor akan memiliki nilai tegangan keluaran yang lebih kecil dibandingkan dengan fototransistor yang terkena cahaya dengan intensitas yang lebih kecil.
BAB V
PENUTUP
5.1 KesimpulanBerdasarkan perancangan dan pengamatan yang telah dilakukan, maka diperoleh beberapa kesimpulan sebagai berikut :
1. Sistem yang dikerjakan dapat berjalan sesuai dengan tujuan dan manfaat, yaitu dapat dicapainya kecepatan angin yang stabil.
2. Dari nilai level tegangan yang diperoleh mengalami perbedaan nilai tegangan atau error. Ini disebabkan karena pengendali Proporsional yang cenderung memiliki sifat
stady state error.
3. Sistem mengalami ganguan yang diakibatkan faktor – faktor luar seperti perubahan intensitas cahaya dan perubahan masukan angin. Perubahan input angin dapat disebabkan oleh hembusan dari angin (alam) dan dari efek orang yang lewat didekat
Plant ( mengakibatkan perubahan cahaya dan angin masukan ).
5.2. Saran
Beberapa saran bagi pengembangan penelitian ini untuk menuju ke arah yang lebih baik dan sempurna diantaranya adalah sebagai berikut :
1.Lebih mengkondisikan pada waktu dan lokasi yang sama sehingga gangguan dari faktor luar lebih kecil.
2. membuat media Plant yang lebih baik dalam hal untuk mengurangi gangguan dari cahaya maupun angin.
DAFTAR PUSTAKA
[ 1 ] WWW.Elektro Indonesia.com, Pengenalan Metode Ziegler-Nichols pada
Perancangan Kontroler pada PID, Edisi Ke Dua Belas, Maret 1998. Tanggal 13
Desember 2006
[ 2 ] Ogata.K, 1996 , Teknik Kontrol Automatik , Edisi Kedua, Erlangga [ 3 ] Ogata.K, 1985 , Teknik Kontrol Automatik , Jilid 1, Erlangga [ 4 ] http://pdf1.alldatasheet.com/datasheet-pdf
[ 5 ] Sugiri, A.Md., S.Pd, 2004, Elektroniks Dasar dan Peripheral Komputer, Andi [ 6 ] Wasito.S, 2004, Vademekum Elektronika, Edisi Kedua, Gramedia Pustaka Utama
LAMPIRAN 1
Data percobaan sensor Infra Red dan Fototransistor
Dengan kondisi :
Intensitas cahaya sebesar 235 lux Cahaya ruang lampu 20W
Tidak terkena cahaya matahari
Ketika tidak terhalang diperoleh nilai tegangan = 0 Volt Tabel Percobaan Sensor 1 Sensor 2 Sensor 3 Sensor 4 Sensor 5 Sensor 6 Sensor 7 Sensor 8 Tegangan ( Volt ) 2,6 2,7 2,8 2,9 3 3,1 3,2 5 Resistansi ( Ω ) 1,43 k 1,51 k 1,6 k 1,7 k 1,77 k 1,88 k 1,96 k 4,58 k Dengan kondisi :
Intensitas cahaya sebesar 21 lux Cahaya ruang lampu 20W
Terkena cahaya matahari seminimal mungkin
Ketika tidak terhalang diperoleh nilai tegangan = 0 Volt Tabel Percobaan Sensor 1 Sensor 2 Sensor 3 Sensor 4 Sensor 5 Sensor 6 Sensor 7 Sensor 8 Tegangan ( Volt ) 2,6 2,7 2,8 2,9 3 3,1 3,2 5 Resistansi ( Ω ) 1,3 k 1,39 k 1,49 k 1,61 k 1,69 k 1,78 k 1,87 k 4,48 k Gambar rangkaian yang digunakan pada sensor
Lampiran 2
Data pengamatan dan pengukuran intensitas caya menggunakan Lux Meter
A. Waktu 10.00 Wib cuaca cerah Lokasi : Lab TA lantai 4 Kondisi :
1. Lampu menyala diperoleh intensitas sebesar : 86 lux 2. Dekat jendela diperoleh intensitas sebesar : 880 lux 3. Luar ruangan diperoleh intensitas sebesar : 2000 lux
B. Waktu 10.10 Wib cuaca cerah Lokasi : Lab Perancangan Kondisi :
1. Lampu nyala jendela tertutup diperoleh intensitas sebesar : 54 lux
C. Waktu 10.15 Wib cuaca cerah Lokasi : Lab Telkom Kondisi :
1.Lampu mati jendela tertutup diperoleh intensitas sebesar : 21 lux 2.Lampu nyala jendela tertutup diperoleh intensitas sebesar : 235 lux
D. Waktu 10.20 Wib cuaca cerah Lokasi : Ruang Ujian TE Kondisi :
1. Lampu nyala diperoleh intensitas sebesar : 450 lux 2. lampu mati diperoleh intensitas sebesar : 27 lux E. Waktu 19.00 WIB cuaca cerah
Kondisi :
LAMPIRAN 3