BÖLÜM I
1.1 GİRİŞ
Günümüzde bütün dünya memleketleri , yer üstü ve yer altı enerji kaynaklarının en ekonomik şekilde harcama yollarını ararken , kurulmuş enerji kaynaklarının da en verimli kullanılmasına çalışılmaktadır.
Elektrik enerjisinin , ürettiği santralden en küçük alıcıya kadar dağıtımda en az kayıpla taşınması çok önemlidir.
Dünyamızda elektrik enerjisine ihtiyacın her geçen gün biraz daha artması , enerji üretiminin gittikçe pahalaşması , taşınan enerjininde kaliteli , ucuz ve hakiki iş gören aktif enerji olmasını daha zorunlu kılmaktadır.
Bilindiği gibi , şebekeye bağlı bir alıcı , eğer bir motor , bir transformatör , bir floresant lamba ise , bunlar manyetik alanların temini için bağlı oldukları şebekeden reaktif güç çekerler. Bu çekilen reaktif güç aktif işe dönüşmediği gibi , gereksiz yere hatları yükler , hem ilave gerilim düşümüne ve zayiata sebep olur hemde böylelikle hattın taşıma kapasitesinin düşmesine yol açar. Reaktif güç çekilimi başı boş bırakılırsa güç katsayısı çok düşer. Güç katsayısı reaktif güç için bir ölçüdür. Bunun için güç katsayısı belli bir sınırda tutulmalıdır. Böylece reaktif güç çekilimi kontrol altına alınmış olacaktır.
1.2 GÜÇ KATSAYISI VE COSϕ ’ NİN TARİHÇESİ
Elektrik enerjisinin keşfinde büyük rolleri olan Franklin , Volta , Orsted gibi bilginler doğru akım tekniğinde büyük buluşlar yapmışlar. Alternatif akım mevzusunda Faraday 1831 tarihinde endüksiyonu açıklamış , birçok bilginler arkasından jeneratörü keşfetmeye uğraşmışlardır.
Max Well’in alternatif akım mevzusunda matematiksel açıklamaları , “Faz Farkı” nı bulmasıyla , gelişmeler yavaş yavaş ilerlemiş , hatta 1881 tarihinde Amerika’da patent dairesi transformatörü bulan kişinin patent müracaatını böyle bir buluş olmaz diye geriye çevirmiştir.
Daha sonraları alternatif ve trifaze sistemde gelişmeler olmuş , 1891 senesinde Frankfurt’ta elektroteknik kongresinde Dolio – Dobrowolski akımının komponentlerini “güçlü akım” , “güçsüz akım” diye ortaya atmıştır.
Bu tarihlerde akımın komponentlrine çeşitli isimler de konmak istenmiştir.
1907 senesinde Alman – İsviçre , Avusturya elektroteknik daireleri müşterek olarak “AEF” adı atında bir oda kurmuş , 1909 senesinde bu oda ilk defa alternatif akım terimlerini açıklamıştır.Ve akımın komponentlrini “Leistungsstrom” (güç akımı) , “Ouerstrom” (çapraz ters akım) diye belirlemiştir.
1913 senesinde yeni açıklamada ise bu komponentlere “Wirkstrom” (aktif akım) ve “Blindstrom” (kör akım , reaktif akım) diye isim verilmiştir. Bu deneyimler günümüze kadar kullanılmakta devam edegelmiştir. 1879 ile 1891 seneleri arasında çok fazlı sistemin bulunuşunda TESLA (Avusturya) , Ferrais (İtalya) , Bradley (Usa) , Dobrowolski (Almanya) gibi bilginlerin ayrı ayrı veya müştereken çalışmaları neticesi aktif güç mevhumunu 1922 senesinde de Buchholz “Görünür Güç”ü yeniden izah etmiş , W. Ouade ile 1934 ile 1939 seneleri arasında “güç” ile ilgili açıklamaları toplamıştır.
Son 15 yıl içersinde de “Görünür Güç” ile ilgili terimler , açıklamalar , teklifler tartışılmaya bırakılmıştır.
Bugün IEC ‘de dahi kati açıklıkta tabirler henüz bulunmamaktadır. Bucholz akım , gerilim , güç değerlerinin ortalaması ile ilgili ortalama güç katsayısı terimini ortaya atmış , fakat bu düşünce tutulmamıştır. Daha sonra zamanla değişen ortalama değerlerden bahsedilmiş , ancak 1963 senesinde “Blindleistung” (kör güç) (reaktif güç) ve bununla ilgili problemler VDE – Tagung’ta görüşülmüş , harmoniklerin yarattığı kör güç’e “Nodulationleistung” denilmesi teklif edilmiştir.
Görülüyor ki bütün bu çalışmalar sadece yeni yeni terimler bulmak için yapılmamış , pratikteki eksiklere , sorulara bir cevap vermek düşüncesiyle ortaya çıkarılmıştır.
BÖLÜM II
GÜÇ KATSAYISI VE REAKTİF GÜÇ
2.1 EMPEDANS,DİRENÇ,ENDÜKTANS VE KAPASİTANSBu devrenin empedansı ohm kanuna göre , bu devreye tatbik edilen gerilim ve geçen akıma göre bulunmaktadır. Alternatif akımda empedans (Z)’nin bir aktif (R), birde reaktif (X) bileşeni bulunmaktadır.(Şekil.2.1) Z X Z = I U ohm = Amper volt (2.1) R
Şekil2.1.Empedansın aktif ve reaktif bileşeni.
Burada Z empedansın R ve X’e göre tatbik edilen U geriliminin de UR ve UB
komponentlerinin arasındaki bağıntısı aynıdır. Tatbik edilen U geriliminin aktif ve reaktif komponentleri bunlara ait dirençlerin seri bağlanmasına tekabül etmektedir.(Şekil.2.2)
U UR UB I R = I UR X = I UB (2.2)
Şekil 2.2 Seri RL devresi. Z= ( R2 + X2 )1/2 (2.3) Z , R , X (Ohm)
Bir elektrik devresinin içersindeki cihazlar empedans teşkil ederler ve akımın gerilime göre faz durumunu temin ederler. Bunun için üç hal mümkündür.
1.Devredeki cihazlar sadece omik değerdedir. (Akkor flemanlı lambalar )(Şekil.2.3) X = 0’dır. Z = ( R2 + O2 )1/2 = R
Şekil.2.3 Omik durum.
2. Devredeki cihazlar indüktüf karakteristiktedir. Akım vektörel olarak tatbik edilen gerilime göre ϕ açısı kadar geridedir. (Transformatörler , motorlar , bobinler)(Şekil.2.4)
Endüktif reaktans = XL Şekil.2.4 Endüktif durum.
3. Devredeki cihazlar genellikle kapasitif karakteristiktedir. Akım vektörel olarak gerilime göre ϕ açısı kadar ileridedir.(Kondansatörler) (Şekil.2.5)
2.2 GÖRÜNÜR , AKTİF VE REAKTİF GÜÇ
Elektrik enerjisi bugün artık yalnız alternatif akım enerjisi olarak üretilip dağıtılmaktadır. Tüketiciler ise , şebekeden I gibi bir görünür akım çekmektedir. Fiziksel ve matematiksel açıdan kolaylık sağlamak için , tüketicilerin çektiği bu akım , teorik bakımdan biri aktif diğeri ise reaktif akım olmak üzere iki bileşeni olduğu kabul edilmektedir.
Tüketicinin çektiği akımın meydana getirdiği aktif güç , tüketici tarafından faydalı hale getirilir. Örneğin ısı harcayan cihazlarda aktif güç termik güce , motorlarda mekanik güce , lambalarda ise aydınlatma gücüne dönüşür. Yani aktif akımın meydana getirdiği aktif güç , faydalı güce çevrilebilir. Ancak reaktif akımın meydana getirdiği reaktif güç ise faydalı güce çevrilemez. Reaktif güç ,yalnız alternatif akıma bağlı bir özellik olup , elektrik tesislerinde istenmeyen bir şekilde etki yapar. Bu etki ; generatörlerin , transformatörlerin , hatları lüzumsuz yere işgal edilmesi , gereksiz yükler , ilave ısı kayıpları ve gerilim düşümleri şeklinde görülür.
Aktif güç enerjisi normal sayaçlarda tespit edildiği halde reaktif enerji böyle bir sayaçla kontrol edilemez. Bunu kaydetmek için ayrı bir reaktif güç sayacına ihtiyaç vardır.
Reaktif güç , faydalı güce çevrilemez ise de , bundan tamamen vazgeçilemez. Zira generatör , transformatör , bobin ve motor gibi bütün işletme araçlarının normal çalışmaları için gerekli olan manyetik alan , reaktif akım tarafından meydana getirilir. Bilindiği gibi , endüksiyon prensibine göre çalışan bütün makineler ve cihazlar , manyetik alanın meydana getirilmesi bir mıknatıslanma akımı çekerler ; işte bu mıknatıslanma akımı , reaktif akımdır. Onun için reaktif güçten vazgeçilmez. Mıknatıslanma akımı , endüktif karakterli bir akımdır. Magnetik alan oluşması esnasında şebekeden çekilir ve alan ortadan kalkarken , bu akım tekrar şebekeye iade edilir. Bu yüzden reaktif güç , üretici ve tüketici arasında devamlı olarak şebeke frekansının iki katı bir frekansla salınır.
Bir tüketicinin şebekeden çektiği görünür güç : S = 3 Uf . If = 3Uh. Ih
dir. Burada Uf faz gerilimi , Uh hat grilimi , yani iki faz arası gerilimdir. Aktif güç ile aktif akım ,
gerilimle aynı faz olmasına rağmen , çekilen gücün endüktif olması halinde , S görünür gücü ve I hat akımı , gerilimden ϕ açısı kadar geride kalırlar. Buna göre aktif akım ;
aktif güç ; P = S . cos ϕ ( 2.6 ) reaktif akım ; Iq = I . sin ϕ ( 2.7 ) reaktif güç Q = S . sin ϕ ( 2,8 )
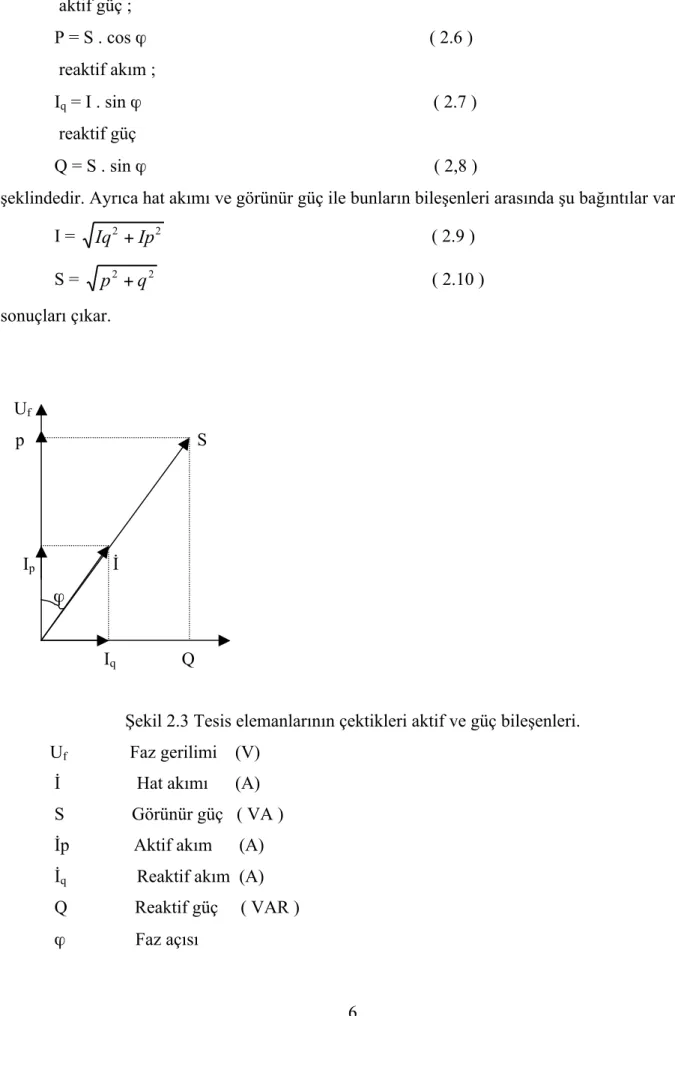
şeklindedir. Ayrıca hat akımı ve görünür güç ile bunların bileşenleri arasında şu bağıntılar vardır. I = 2 Ip2 Iq + ( 2.9 ) S = p +2 q2 ( 2.10 ) sonuçları çıkar. Uf p S Ip İ ϕ Iq Q
Şekil 2.3 Tesis elemanlarının çektikleri aktif ve güç bileşenleri. Uf Faz gerilimi (V)
İ Hat akımı (A) S Görünür güç ( VA ) İp Aktif akım (A)
İq Reaktif akım (A)
Q Reaktif güç ( VAR ) ϕ Faz açısı
Şekil 2.3’ de , akım ve güç fazörlerinin birbirlerine göre durumları gösterilmiştir. Burada reaktif akımın ve reaktif gücün safi endüktif karakterde oldukları kabul edilmiş ve gerilime göre 90° geri fazda çizilmişlerdir.
2.3 GÜÇ KATSAYISI
faz gerilimi doğrultusundaki Ip akımı ( veya p aktif gücü ) ile I hat akımı ( veya s görünür
gücü ) arasındaki ϕ açısına faz açısı ve bunun kosinüsüne güç katsayısı denir. Aktif güçle görünür gücün oranı güç katsayısını verir ;
λ =
S P
( 2.11 ) akım ve gerilim sinüzoidal olması halinde ;
λ = cos ϕ ( 2.12 ) cos ϕ = 1 ( sadece aktif güç mevcuttur. Yani ϕ = 0º ) cos ϕ = 0 ( sadece reaktif güç mevcuttur. Yani ϕ = 90º )
Sinüzoidal olmayan bir gerilimin ve akımın efektif değeri , harmonik değerlerinin karesel ortalamasına eşittir. Buna göre gerilimin efektif değeri ;
U =
∑
∞ 12
Uv ( 2.13 )
Ve akımın efektif değeri ; I =
∑
∞1 2
Iv ( 2.14 ) dir.
Harmonikli akımda temel dalganın içeriği ; g = I I1 =
∑
∞ 1 2 1 Iv I ( 2.15 )K = I I Iv
∑
∞ − 1 2 1 2 = I I I 2 1 2 − = 1 g2 − ( 2.16 ) ifadesi ile verilmiştir.Gerilimin sinüs şeklinde ve buna karşılık herhangi eğri şeklinde olması halinde , çekilen aktif güç için sadece akımın temel dalga bileşeni için geçerlidir ;
P = U . I1 . cos ϕ1 ( 2.17 )
I1 = Akımın temel harmoniğininefektif değeri ,
ϕ1 = bu akımın gerilime göre faz açısıdır.
Görünür güç ve reaktif güç de aynı şekilde akımın temel dalga bileşenine göre hesaplanabilirler :
Temel harmoniğin görünür gücü ;
S1 = U . I1 = g .S ( 2.18 )
Temel harmoniğin reaktif gücü ;
Q1 = U . I1 . sin ϕ1 = g . S sin ϕ1 ( 2.19 )
Temel harmoniğin aktif gücü ;
P1 = U . I1 . cos ϕ1 = g .S .cos ϕ1 = λ . S ( 2.20 )
Ve en son olarak temel harmoniğin güç faktörü ;
λ = g . cos ϕ1 ( 2.21 )
λ = I I1
. cos ϕ1 ( 2.22 )
Görüldüğü gibi akım ve gerilim sinüzoidal olması halindeki güç katsayısı ile , akım ve gerilimin nonsinüzoidal olmasındaki güç katsayısı birbirinden farklıdır.
BÖLÜM III
DÜŞÜK GÜÇ KATSAYISININ SEBEPLERİ VE ETKİLERİ
3.1 DÜŞÜK GÜÇ KATSAYISININ BAŞLICA NEDENLERİ1-) Elektrik tesislerinin en önemli işletme araçları olan genaratörler , transformatörler ve hatlar , sanayi işletmelerindeki her tür motorlar , fırınlar ve kaynak makineleri ve bir balast
yardımı ile çalışan flüoresan lambalar , civa ve sodyum buharlı lambalar gibi deşarj lambaları , çektikleri aktif güçlerin yanında oldukça önemli miktarda reaktif güç çekerler. Reaktif güç üretiminin santrallerde bir ham enerji maddesi sarfiyatına bağlı olmadığı gerekçesinden hareket edilerek , reaktif güç sarfiyatı kontrolsüz ve başı boş bırakılırsa güç katsayısı düşer.
2-) Elektrik tesislerinindeki elektrik makineleri ve cihazların güçleri bakımından gereğinden fazla büyük seçilmiş olmaları güç katsayısını düşüren sebeplerdir.
3-) Elektrik tesislerinindeki bu makinelerin uzun süre , düşük yükte ve boşta çalışmaları da birim aktif güç başına çekilen reaktif gücü ( veya enerjiyi ) daha da arttırmaktadır. Dolayısıyla şebeke güç katsayısı da düşük olmalıdır.
4-) Anahtarlamalı güç kaynakları , girişinde alçak geçirgen filtrelerden ötürü kapasitif giriş özelliği gösterirler. Bu durum , şebekeden oldukça dar periyoda sahip harmonik dağılımı yüksek darbe akımlarının çekilmesine ve sonuçta giriş güç katsayısının düşmesine neden olur.[Bülbül,1999]
5-) Yarıiletken teknolojisindeki gelişmelere paralel olarak , tristör , triyak , GTO(Gate Turn-Off), IGBT( Insulated Gate Bipolar Transisitor) gibi yarı-iletken güç elektroniği elemanlarının elektrik güç sistemlerinde kullanımı her geçen gün artmaktadır. Yine güç sistemlerinde transformatörler , motor kontrol devreleri , gaz deşarjlı aydınlatma cihazları ( örneğin ; fluoresant , neon , civa buharlı lambalar vb. )vazgeçilmez elemanlardır. Bu elemanlar nonlineer akım gerilim karakteristiğine sahiptirler. Nonlineer akım gerilim karakteristikli elemanlar ise bağlı oldukları devrede akım ve gerilim sinüsoidal dalga şekillerini bozdukları için elektrik güç sistemlerinde non sinüsoidal dalgaların dolaşmasına neden olurlar. [Kocatepe,1995 ]
Elektrik devrelerinde akımın ve gerilimin non sinüsoidal biçimde olması , akımın veya geriliminin temel bileşenin yanı sıra (temel bileşenin tam katı frekanslara sahip ) harmonik bileşenlerinin de ortaya çıkmasına neden olur. Reaktif güç kompanzasyonu bakımından harmoniklerin oluşturduğu en büyük problemlerden biride sinüsoidal dalga şeklinin bozulmasıyla güç katsayısının da düşmesidir.[Kocatepe,1999]
6-) Şunu bilmek gerekir ki ; güç konvertör cihazlarında oluşan düşük güç katsayısı, endüktif motor yüklerinde görülen zayıf güç katsayısından tamimiyle farklıdır.
En basit şekliyle , reaktif lineer devre elemanlarından kaynaklanan düşük güç katsayısı yükün endüktif veya kapasitif olmasına bağlı olarak akım ve gerilim arasındaki faz kayması şeklinde ortaya çıkar. Bu durum şekil 3.1’ de gösterilmiştir.
Şekil 3.1 Geleneksel tip düşük güç katsayısı.
Öte yandan , tipik olarak ekonomik güç konvektör cihazıyla bağlantılı makul düzeyden düşük güç katsayısına non-lineer devre elemanları neden olmaktadır. Güç kaynaklarında akımın yükselme ve düşme oranı hat geriliminden büyüktür ve akım süreksiz olduğu için bir takım harmonikler ( üçüncü , beşinci , yedinci vb. )üretilir. Güç dağıtım sistemlerinde bu harmonikler sorunlara yol açar. ( şekil 3.2 )
3.2 REAKTİF GÜÇ TÜKETİCİLERİ
Reaktif güç sarfiyatı bakımından tüketicileri iki gruba ayırmak gerekir. Bunlardan birincisi , elektrik enerjisinden yararlanarak ısı enerjisi üreten tüketiciler ile akkor flemanlı lambalar , elektroliz ve galvonaplasti tesisleridir. Bunlar sadece aktif güç tüketirler , reaktif güç çekmezler. İkinci gruba ise , elektrik tesislerinde kullanılan magnetik veya statik alanla çalışan bütün elektrikli araçlar şebekeden aktif güç yanında reaktif güç çeker ; bazı koşullar altında reaktif güç verir.
Bunların en önemlileri şunlardır;
• Düşük uyarmalı senkron makineler • Transformatörler
• Bobinler , • Havai hatlar ,
• Asenkron makineler , • Redrösörler ,
• Endüksiyon fırınları , ark fırınları , • Kaynak makineleri ,
• Flüoresan lamba balastları ,
• Sodyum ve civa buharlı lamba balastları , • Neon lamba transformatörleri ,
3.2.1 Asenkron Motorlar
Asenkron motor , magnetik alanın üretilmesi için endüktif reaktif güç çeker. Motorların ektikleri reaktif güç , motorun nominal gücüne ve dönme sayısına bağlıdır ; yani verilen belirli bir güçte , düşük devirli motorlar daha yüksek mıknatıslanma akımı çekerler. Boşta çalışan motor ise , şebekeden hemen hemen yalnız mıknatıslanma akımı çeker. Buna göre düşük devirli motorların güç katsayısıda daha düşüktür.düşük devirli çalışmanın en önemli nedeni , “motorların gereğinden büyük güçte” seçilmiş olmalarıdır.
Şekil 3.3 : Orta büyüklükteki tipik bir asenkron motor karakteristikleri.
Şekil 3.3’ deki grafik incelendiğinde , motorun boşta çalışması ile tam yükte çalışması arasında çekilen aktif güç : boşta kayıplarından ( Demir kayıpları , sürtünme kayıpları ) tam yüküne kadar yüke bağlı olarak değiştiği halde , çekilen reaktif güç : Tam yükünde , boşta çektiği reaktif gücün ancak 1,6 katı civarına kadar yükselebilmektedir.
Tablo : 3.1
Bu tablo incelendiğinde güç katsayısının motorun yüküne ( çektiği aktif güce bağlı olarak değiştiği görülmektedir. )
3.2.2 Transformatörler
Alternatif akım makinelerinin en önemlilerinden biri olan ve en çok kullanılan transformatörler de bağlı bulundukları üst gerilim şebekesinden endüktif reaktif güç çekerler. Transformatörler reaktif gücü , primer ile sekonder sargıları arasındaki enerji transferlerini sağlayabilmek için gerekli olan manyetik alanın oluşmasında kullanılır. “Dağıtım tipi transformatörlerde reaktif akım , toplam akımın %3’ üne ulaşabilmektedir.” [Özay,1983]
3.2.3 Deşarj Lambalar
Flüoresan lambalar , halojen , maden buharlı , civa buharlı , yüksek ve alçak basınçlı sodyum buharlı lambalar ve neon lambaları gibi bütün deşarj lambaları , akımın sınırlayıcı bir düzen aracılığı ile çalışırlar. Bu lambaların akım ve gerilim karakteristikleri yüzünden böyle bir sınırlamaya ihtiyaç vardır. Böylece akımın müsaade edilmeyecek kadar büyük değerlere çıkması ve lambanın zarar görmesi önlenir. Bugün kullanılan en uygun sınırlayıcı düzen , balasttır. Balast demir çekirdekli bir bobinden ibaret olup reaktif bir direnci vardır ve şebekeden reaktif akım çekerek güç katsayısının düşmesine sebep olur.
3.2.4 Ark Fırınları
Ark fırının en önemli özelliği , büyük fırın güçleri sebebi ile elektrot akımının çok büyük olmasıdır. Bu akım , elektrot ile hurda demir arasında deşarj olayı sonucu , gaz ortamda ark şeklinde geçmeğe devam eder. Alternatif akımın tabii olarak her sıfırdan geçmesi esnasında ark söner ve bunu takip eden yarım periyotla arkın yeniden tutuşabilmesi için elektrot aralığında yeteri kadar bir alan şiddeti hüküm sürmesi gerekir. Onun içinde akım ile gerilim arasında belli bir faz farkı olmalıdır. Bu yüzden ark fırının 0,7 gibi oldukça düşük bir güç katsayısı ile çalışması gerekir. Ark fırını işletmesinde “ergitme safhası” adı verilen ve oldukça kararsız olan birinci bölümde stabil bir işletme sağlayabilmek için güç katsayısı düşük olması büyük önem taşır.
Ark fırının çektiği reaktif güç ;
Q = 3. I2 .Xf ( 3.1 )
olup burada I hat akımı ve Xf , faz başına , transformatör dahil , fırının reaktansıdır. Büyük hat
akımlarında reaktif gücün makul sınırlar içinde kalması için reaktansın küçük tutulması gerekir. Bu maksatla ilk tedbir olarak transformatör ile fırın arasındaki iletkenler özel bir şekilde düzenlenirler.
Şekil 3.4’ de ark fırınına ait karakteristik büyüklülerin yük akımına bağlı olarak değişmesi gösterilmiştir.
Şekil 3.4 Ark fırının karakteristikleri. S Görünür güç
P Aktif güç Q Reaktif güç cosϕ Güç katsayısı
Ergitme safhasında güç katsayısı cosϕ = 0,7 olduğundan , fırın tarafından çekilen aktif güç ile reaktif güç yaklaşık birbirine eşittir. Ergitme esnasında mümkün olduğu kadar kararlı bir ark teşekkülü için böyle bir güç katsayısı seçilmesine rağmen , akım hiçbir zaman sabit kalmaz ve reaktif güçte büyük değişmeler baş gösterir. Bunlar 50 Hz’ lik normal periyodik titreşimler dışında tesadüfi titreşimlerden , salınımlardan ve ani değişimlerden oluşurlar. Bunun sebebi de şöyle açıklanabilir: özellikle ergitme safhalarında elektrotlar ile hurda demir arasında sık sık tekrar eden kısa devreler baş gösterir. Bunlar ekseriya iki faz arasında meydana gelirken üçüncü fazda akım kesilir. Nadir hallerde ise her üç fazda da akım kesilebilir. İşte bu gibi olaylar sürekli
yük değişimlerine ve fazların dengesiz yüklenmelerine yol açar. Şekil 3.5’de ark fırının bir fazından çekilen reaktif gücün zaman göre tipik değişimi gösterilmiştir. Burada Q0 , ergitme
safhasında tam yüke stasyoner reaktif gücü ve ΔQ , söz konusu stasyoner reaktif güç etrafında salınım yapan reaktif gücü gösterir.
Şekil 3.5 Ark fırının bir fazından çekilen reaktif gücün zaman göre tipik değişimi. Q0 Ortalama reaktif güç
ΔQ Reaktif güç değişimi
3.2.5 İletim Hatları
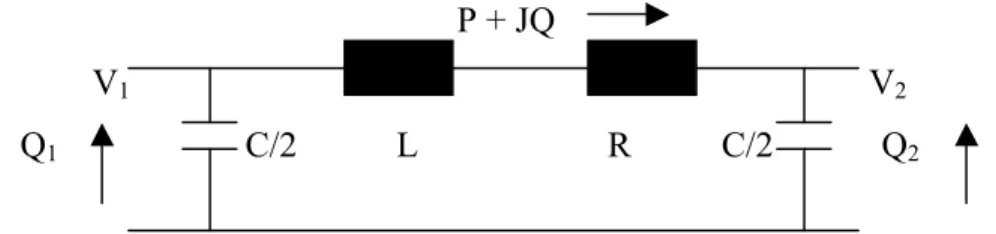
İletim hatları yükün durumuna bağlı olarak reaktif enerjiyi hem üretebilir hemde tüketebilirler. Alıcı ve verici uçlarda gerilim sabit olduğu sayılırsa , hat kapasitansından dolayı üretilen reaktif güç taşınan yükten hemen hemen bağımsızdır. Buna karşı , hattın seri endüktansında tüketilen reaktif enerji taşınan yükün bir fonksiyonudur.
P + JQ
V1 V2
Q1 C/2 L R C/2 Q2
Yükün her an için değişebileceği düşünüldüğünden , hatların reaktif güç dengesi oldukça büyük farklılıklar gösterebilir. Belirli bir yük değeri için , hatların ürettiği reaktif enerji tükettiği reaktif enerjiye eşit olur.
Bu durumu matematiksel olarak incelersek ; Eğer şekil 3.6’ da verilen hattın direnci ihmal edilir ve hat endüktans ve kapasitansları ( ı/m ve c/m ) gösterilirse , alıcı uç da YL yükünü
bağlanmış bir hattın verici uçta görülen admitansı YİN, şöyle ifade edilebilmektedir ;
YİN =YL 2 2 0 0 2 ) (cot ) / ( )) / / ( (cot ) (cot 1 γ γ γ − − − − Y Y Y Y Y Y J L o L L Burada Y0 = l c
= hattın doğal admitansı , ( 3.3 )
γ = l. = hattın propagasyon sabiti , ( 3.4 ) c λ = hat uzunluğu ,
verir. Bu denklem incelendiğinde şu üç durum oluşur.
1-) Yük adimtansı hattın doğal adimtansına eşit olduğunda YİN = Y0 olmakta , ve sanal kısım yok
olduğunda , hattım hiçbir reaktif enerji gereksinimi olmamaktadır.
2-) Yükün düşük olduğu durumlarda ( Y0 > YL ) , alıcı uçta görülen eşdeğer admitans kapasitif
olmakta ve hat reaktif enerji üretmektedir.
3-) Yükün büyük olduğu durumda ise (YL > Y0 ) , eşdeğer admitans endüktif olmakta ve reaktif
enerji tüketilmektedir.
3.3 REAKTİF GÜÇ ÜRETEN ARAÇLAR
Reaktif güç ihtiyacını karşılamak için reaktif gücün bir yerde üretilmesi gerekir. Bunun için en eski ve en klasik yol , aktif güç gibi reaktif gücün de senkron genaratör tarafından üretilmesidir. Reaktif güç üretimi , aktif güç gibi , santrallerde su kuvveti , akar yakıt ,kömür ve benzeri ham enerji maddesinin sarfını gerektirmez ; sadece genaratör uyarmasının arttırılması ile genaratör endüktif reaktif güç verecek duruma getirilir. Böylece santrallerde üretilen reaktif güç , genaratör , transformatör ve enerji nakil hattı üzerinden geçerek tüketiciye ulaşır. Bu esnada elektrik tesisleri reaktif güç tarafından gereksiz işgal edileceklerinden aktif güç bakımından
bunların kapasitelerinden tam olarak yaralanmak mümkün olmaz ve işletme ekonomik olmaktan çıkar.onun için tesisleri reaktif güçten kurtarmak , tesis elemanlarının kapasitelerinden tam olarak faydalanmak ve ekonomik bir işletme sağlamak maksadı ile reaktif gücün santrallerde değilde tüketim merkezlerinde üretilmesi en ekonomik yoldur.
Reaktif güç üretimi için iki işletme aracından yararlanılabilir :
1-) Dinamik faz kaydırıcılar , aşırı ikaz edilmiş senkron makinelerdir. ( Senkron Kompansatörler) 2-) Statik Faz Kaydırıcılar , Kondansatörler
3.3.1 Dinamik Faz Kaydırıcılar
• Senkron Kompansatörler • Senkron Makineler
• Senkronlaştırılmış Asenkron Makineler
Reaktif güç üretiminde kullanılan dinamik faz kaydırıcıların başında aşırı uyarılmış senkron makineler gelir. Genel olarak santrallerden enerji nakil hatlarının sonunda ve tüketim merkezlerinin başında şebekeye bir senkron makine paralel bağlanır ve bölgenin reaktif güç ihtiyacını bu makine tarafından sağlanır. Şebekeye bağlanan senkron makine , şebekeden boşta çalışma kayıplarını karşılayacak kadar az bir aktif güç çeker ve şebekeye istenen reaktif gücü vererek bir reaktif güç üretici ( genaratörü ) olarak çalışır ve bu esnada bunun artıca tahrik edilmesine de gerek yoktur.
Senkron makineler , senkron kompansatörlere göre : Yatak ve milleri daha güçlü olarak yapılırlar. Kompansatörlerin ise kayıpları daha az olup uyartım donanımlarının ayar sınırları daha geniştir.
Nominal uyarlandığında güç katsayıları “cosϕ = 1” dir. Çok yada az uyarlandıklarında reaktif enerji üretirler yada tüketirler. Senkron kompansatörler reaktif enerji üretici olmakla beraber , hattın yüksüz olması halinde hat sonu geriliminin yükselmesine engel olmak için reaktif enerjide çekerler , böylece gerilim regülasyonu da sürekli kontrol altında bulundururlar.
3.3.2 Statik Faz Kaydırıcılar
• Kondansatörler
Dielektrik olarak ; kağıt , polipropilen film yada bunların karışığı kullanılır, işletme gerilimine göre bunların kalınlığı ( katları ) arttırılır. Dielektrik şeritlerin iki tarafı alüminyum şeritle kaplanır. Yuvarlak veya yassı şekilde şekillendirilen bu kondansatör elemanlardan biri veya birkaçı paralel bağlanır ve bir saç kutu içersine yerleştirirler. Kutunun içi maneni veya yanmaz sentetik bir yağ ile doldurulur.
Senkron kompansatörlerle , statik kondansatörlerin karşılaştırılması ;
• Kondansatörler sadece reaktif enerji üretirler , senkron kompansatörler gerilim regülasyonunu düzenlerler ve reaktif enerji üretir ve tüketirler.
• Senkron kompansatörler geçici olarak aşırı yüklenebildikleri halde , kondansatörler için bu durum % 10-15’i aşamayacak şekilde sınırlıdr.
• Kondansatörler sadece gerilim düşmelerini kademeli olarak etkili olabilir.
• Gerilim çökmelerinde kondansatörlerin reaktif üretimleri azdır , senkron kompansatörlerde artar.
• Senkron kompansatörler kısa devre akımlarını beslerler.
• Devre açılıp kapanmalarında kondansatörlerde gerilim ve akım darbeleri olduğu halde senkron kompansatörlerde sorun yoktur.
• Senkron kompansatörlerin kayıpları ortalama %2 civarında bulunduğu halde , kondansatörlerde % 0,5’in altındadır
• Senkron kompansatörler büyük güçler dışında ekonomik değildirler, kondansatörler ekonomiktir.
• Senkron kompansatörlerin işletme ve bakım güçleri vardır.
• Kondansatörler , fazla yer kaplamaları , herhengibi yere yerleştirilmelerinin sorun olmayışı , istenilen büyüklük ve gerilimde ( Bataryalar teşkiliyle ) kullanılabilmeleri , bakıma gereksinim duyulmaması , işletme güçlüklerinin bulunmayışı , her geçen gün kalitelerinin artarak maliyetlerinin düşmeleri ve ömürlerinin uzun oluşu gibi özellikleri sebebiyle enerji üretiminde en çok kullanılan elemanlardır
3.4 DÜŞÜK GÜÇ KATSAYISININ DOĞURDUĞU SORUNLAR VE SONUÇLAR Tüketicilerin güç katsayısı belirli limitlerin altında kaldığı sürece besleme sisteminin ortalama güç katsayısı da düşük olur. Düşük güç katsayısının etkileri tüketici ve üretici yönünden aşağıda özetlenmiştir.
Üretici Yönünden : Kurulacak Bir Tesiste :
• Genaratör ve transformatörlerin daha büyük güçte seçilmesine , • İletkenlerin daha kalın kesitli olmasına ,
• Kumanda kontrol ve koruma cihazlarının daha büyük ve hassas olmasına neden olur. Kurulu Bir Tesiste :
• Üretim , iletim ve dağıtımda kapasite ve verimin düşmesine , • İletkenlerde kayıpların ve gerilimin düşümünün artmasına , • Gerilim regülasyonu ve işletmeciliğin zorlaşmasına neden olur Sonuç olarak; üretim maliyeti artar.
Tüketici Yönünden : Kurulacak Bir Tesiste :
• Alıcı transformatörünün , ( varsa ) kumanda , koruma ve kontrol donanımının daha büyük olmasına ,
• Tesisat iletkenlerinin daha kalın kesitli seçilmesine , neden olur. Kurulu Bir Tesiste :
• Transformatör ( varsa ) o tesisatın kapasite ve veriminin düşmesine , • Şebekeden daha çok reaktif enerji çekilmesine ,
• Kayıpların ve gerilim düşümünün artmasına , neden olur. Sonuç olarak ; Görülen hizmet ve üretilen ürünün maliyeti artar.
Bütün bunların yanında gereksiz yatırımlar yapılması ile milli ekonomiye zarar verilmiş olur.
BÖLÜM IV
DÜŞÜK GÜÇ KATSAYISINI İYİLEŞTİRME
4.1 DÜŞÜK GÜÇ KATSAYISININ DÜZELTİLMESİNİN YARARLARIGüç katsayısının düzeltilmesi , elektrik tesislerinde çeşitli yaralar sağlar : bunların en önemlileri şunlardır.
1-) Genaratörlerin , transformatörlerin ve enerji nakil hatlarının yükleri düşer ve yeni yükler için imkan sağlanır ,
2-) Tesisteki toplam gerilim düşümü küçülür ve 3-) Tesisteki toplam kayıplar azalır,
4-) Tüketici yönünden elektrik faturasında azalma: • Reaktif enerjide azalma
• Aktif enerji tüketiminde azalma
Düşük güç katsayısının düzeltilmesinin şebeke ve tüketici bakımından yararlarını hesaplama ile şu şekilde gösterebiliriz :
Hesaplamalarda omik (R) direnci , reaktif drenci (X) olan besleme hattı ele alınacak ve bunun sonunda bir tüketicinin besleneceği kabul edilecektir.
U1 R , X U2
S , cos ϕ Şekil 4.1 Bir besleme hattı ve tüketici. R Hattın omik direnci X Hattın Reaktif direnci
U1 Hattın başındaki faz gerilimi
U2 Hattın sonundaki faz gerilimi
cos ϕ Güç katsayısı
4.1.1 Şebekedeki Yaraları
Güç katsayısın düzeltilmesi ile , üretim , iletim ve dağıtım tesislerinde sağlanan faydalar , üç madde halinde özetlenebilir ;
1-) Şebekenin güç kapasitesinin artması :
İlk önce hat sonundan çekilen ( p) aktif güç sabit olsun ; Kompanzasyondan önce çekilen görünür güç : S1 = 1 1 cosϕ P ( 4.1 )
Kompanzasyondan sonra çekilen görünür güç : S2 =
2 1 cosϕ
P ( 4.2 )
olduğuna göre ikisi arasındaki fark :
ΔS = S1 – S2 ( 4.3 )
kompanzasyondan önceki değere oranı %S = 1 S S Δ .100 = 100 . (1 - 2 1 cos cos ϕ ϕ ) ( 4.4 )
kompanzasyonun yapılması ile tesisin yükü %ΔS oranında azalır veya tesis aşırı zorlanmaksızın % ΔS oranında yüklenebilinir.
Şimdide hat sonundan çekilen görünür güç (s) sabit olsun ; Kompanzasyondan önce çekilen aktif güç :
P1 = S1 cos ϕ1 ( 4.5 )
Kompanzasyondan sonra çekilen aktif güç :
P2 = S1 cos ϕ2 ( 4.6 )
arasındaki fark :
ΔP = P1 – P2 ( 4.7 )
%ΔP = 100 . 1 P P Δ = 100 . ( 1 2 cos cos ϕ ϕ - 1) ( 4.8 )
oranında artması tekabül eder.
2 – Şebekede Isı Kayıpları Azalması :
Hat sonundan çekilen aktif gücün sabit kaldığı kabul edilirse , kompanzasyondan önceki ısı kaybı : PZ1 = 1 2 2 2 1 cos . . ϕ U P R ( 4.9 )
Kompanzasyondan sonraki ısı kaybı : PZ2 = 2 2 2 2 1 cos . . ϕ U P R ( 4.10 )
Güç katsayısının düzeltilmesi ile bağıl ısı kaybı cinsinden elde edilen kazanç , % Z = 100 . 1 2 1 Z Z Z P P P − = 100 . ( 1 2 2 2 cos cos ϕ ϕ -1) ( 4.11 ) dır.
Tam kompanzasyon halinde ( cosϕ2 = 1 ) göre , çeşitli güç katsayıları için , şebeke ısı
kayıplarının hangi oranda azalacağı cetvel 1’ de verilmiştir
Cetvel 4.1 : cosϕ2 = 1 haline göre , çeşitli güç katsayısı için şebeke ısı kayıplarındaki kazançlar.
cosϕ2 % Z 1.0 0 0.9 19 0.8 36 0.7 21 0.6 64 0.5 75
3 - Gerilim Dönüşüm Azalması:
Şekil 4.1’ de gösterilen besleme hattının başındaki gerilim U1 ve sonundaki gerilim U2 ise
, hat üzerindeki boyuna gerilim düşümü ΔU ile ifade edilir. Buna göre ; ΔU = ΔUR + ΔUX ( 4.12 )
ΔU = R . I cos ϕ + X . I sin ϕ ( 4.13 ) ΔU = R . Ip + X . Iq ( 4.14 )
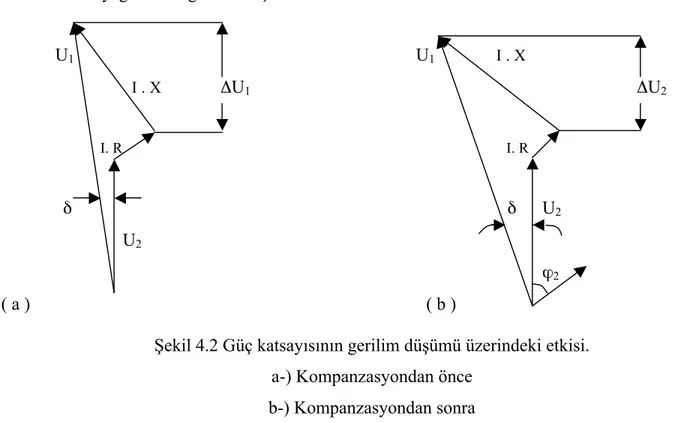
dir. Güç katsayısının cos ϕ1’ den cos ϕ2’ ye çıkarıldığında gerilim düşümünün aldığı değer, şekil
4.2’ de fazör diyagramı ile gösterilmiştir.
U1 U1 I . X I . X ΔU1 ΔU2 I. R I. R δ δ U2 U2 ϕ2 ( a ) ( b )
Şekil 4.2 Güç katsayısının gerilim düşümü üzerindeki etkisi. a-) Kompanzasyondan önce
b-) Kompanzasyondan sonra
hat üzerinden çekilen P aktif gücünün sabit kaldığı kabul edilirse , hat üzerinden müsaade edilen bağıl zayiat gücü ;
% Pz = 100 .
P R I2
3 ( 4.15 )
olduğuna göre denklem ( 4-13 ) yerine bağıl gerilim düşümü cinsinden ; % ε = 100.( Pz . cos2ϕ + . 2 N U X P . tan ϕ) ( 4.16 ) elde edilir.
Gerekirse boyuna gerilim düşümü sıfır olacak şekilde bir enerji nakli yapılırsa , bu durumda denklem ( 4-13 )’ e göre reaktif akım değeri ;
Iq = - Ip . X R ( 4.17) veya tan ϕ = - X R ( 4.18 )
olmalıdır; burada eksi işareti reaktif akımın kapasitif karakterde , yani faz açısının negatif olması gerektiğini gösterir.
Alçak gerilim şebekelerinde reaktif direnç ihmal edildiğinden , gerilim düşümü , hat akımın aktif bileşeni ile hattın omik direncinin çarpımına eşit , yani ;
ΔU = Ip . R ( 4-19 )
olduğundan burada reaktif akımın tesiri görülmez.
4.1.2 Tüketici Yaraları
Tüketici tesisi kurarken güç katsayısını düzeltecek önlemleri alırsa veya mevcut tesisin güç katsayısını düzeltirse ,
• Gereksiz yatırım yapmamış olur , • Kayıpları azalır ,
• Gerilim düşümü azalır ,
• En önemlisi , reaktif enerji ücreti ödemez.
4.1.3 Güç Kaynağındaki Yaraları
Güç akımım harmoniklerinin azaltılması ve yüksek değerde güç faktörü elde edilmesi , güç kaynakları için giderek büyük önem kazanmaktadır. Özellikle yeni oluşturulan standartlar , Avrupa ülkeleri için IEC 1000-2 standardı bu konuda önemli yaptırımlar gerektirmektedir. [Bülbül,1999]
AC şebeke girişinde ölçülen güç , yükün güç faktörüne ( pf ) ve toplam verime ( η ) bağlıdır. Giriş ( Pin ) ve çıkış ( P0 ) gücü arasındaki ilişki şöyle ifade edilir.
Pin =
(
xpf)
P
η
Girişten çekilen gücün azaltılması ve aynı yük değerlerinde şebekenin daha verimli kullanılabilmesi için güç faktörünün ve verimin yükseltilmesi gerekmektedir.
4.2 DÜŞÜK GÜÇ KATSAYISINI DÜZELTME YÖNTEMLERİ Düşük güç katsayısını düzeltme iki yöntemle yapılmaktadır. Bu yöntemler ;
• Pasif yöntem • Aktif yöntem olmak üzere ikiye ayrılır.
1-) Pasif Yöntem
Önce düşük güç katsayısının nedenleri araştırılır. Elde edilen veriler göre : • Güç katsayısının düşük olmasının nedenleri ortadan kaldırılır.
• Makine ve cihazlara güç katsayısını “optimum” noktaya kadar getirecek düzenekler eklenir. Bu düzenekler ;
_ Kondansatörler
_ Senkron kompansatör veya senkron motorlar , _ Tristörlü statik var kompansatör ;
dir.
Tesislerde bu elemanlar reaktif güç üretimi için kullanılır. Bu sayede tesislerin şebekeden çektiği reaktif enerji azaltılmış güç katsayısı yükseltilmiş olur.
Güç kaynaklarında ; alçak geçirgen filtreler kullanılarak akım harmonikleri azaltılmaya , faz kaydırıcı bobin ve kondansatör yardımıyla akım , gerilim dalga şekilleri aynı faza getirilmeye çalışılır.
Pasif elemanlarla yapılan güç katsayısı düzeltme işlemine pasif yöntem denilmektedir. Pasif yöntem işletmelerde yaygın olarak kullanılan bir yöntemdir. “Fakat ağır elemanlar içermesi , elemanların geniş hacim kaplaması ve yüksek güç uygulamaları için pahalı bir yöntem olması nedeniyle güç kaynaklarında yaygın olarak kullanılmamaktadır.” [Bülbül,1999]
2-) Aktif Yöntem
Bu yöntem genellikle besleme kaynağının nonsinüsoidal olması veya elemanların nonlineer karakterde olması durumunda kullanılır.
Nonsinüsoidal büyükleri içeren devrelerde güç katsayısının düzeltilmesi için harmonik bileşenlerin göz önüne alınması gerekmektedir.
Aktif yöntemde kullanılan elemanlar güç elektroniği elemanlarıdır. Bunlar MOSFET ( Metal Oxside Schottky Field Effect Transistor) , IGBT ve GTO gibi elemanlardır.
Aktif güç düzelticinin amacı , giriş akımını rezistif yüklerde olduğu gibi mümkün olduğunca giriş gerilimine benzetmektir. Bunun için anahtarlamalı regülatör tekniği kullanılır.
4.3 PASİF YÖNTEM
4.3.1 Elektirik Makine ve Cihazların Güç Katsayılarının “Optimum Çalışma Noktasındaki” Değerlerine Yükseltilmesi
• Tesisin trafosu varsa ve uzun süre az yükte ve boşta çalışması söz konusu ise : trafonun hiç olmazsa boşta ve çok düşük yükte çakışması önlenmelidir. Tesis trafosunun aydınlatma ve bazı nedenlerle gerilim altında bulunması zorunlu olduğu hallerde , küçük enerji gereksinimleri karşılanmak üzere tesise küçük bir trafo yerleştirilir. Vetesis çalışmadığı zamanlarda büyük trafo gerilim altında tutulmamalıdır.
• Yeni yapılacak bir tesise trafo gerektiriyorsa ve tesisin uzun süre düşük yükte ve boşta çalışması söz konusu ise : bir trafo yerine yarı güçte ( veya belirli güç oranlarında ) 2 trafo konulması daha uygun olur. Düşük yük periyotlarında trafonun sadece birisi devrede bulunur. Diğeri ise enerjisiz kalır.
• Güç katsayıları bilhassa az yüklenmeleri halinde çok düşen asenkron motorlar , çok yaygın olarak kullanırlar , bu nedenle asenkron motorlara “endüstri motorları” da denir. Kurulu bir tesisteki “endüstri motorları” ihtiyaçtan büyük güçte seçilmiş iseler , mümkünse daha küçük güçteki motorlarla değiştirilmelidir. Yeni kurulacak bir tesiste motorların uygun güçte seçilmesine dikkat edilmelidir.
• Uzun süre düşük yükte çalışan transmisyon tesislerinde motor gücü birden fazla motor tarafından sağlanıyor ise : düşük yük periyotlarında , motorların bazıları devre dışı edilebilir. Bu durumda sistemden çekilen aktif güçte düşer. Motorlar daha yüklü çalışır verimleri artar ve birim aktif güç başına gerekli reaktif güçte düşer. (Güç katsayısı yükselir.) _Yıldız_Üçgen şalterle yol verilen motorlar çok düşük yüklerde ve boşta iken
şalter otomatik olarak yıldız konumuna alınabilir. Oto trafosu ile yol verilen motorlar ise aynı durumlarda trafoları alt gerilim kademesine düşürülebilir
Bu yöntemlerle güç katsayısını düzeltmeyi , işletme ve kumanda güçlükleri nedeniyle işletmeler pek kullanılmaz.
4.3.2 Dolaylı Olarak Güç Katsayısını Düzeltme Çareleri “cos ϕ” yi iyileştirmek için ( tan ϕ küçülür ) iki yöntem kullanılır.
4.3.2.1 Şebekeden Çekilen Aktif Enerji Arttırılarak
Sistemden çekilen aktif enerji arttırılacak birim aktif güç başına düşen reaktif enerji azaltılmış olur. Sisteme bağlanacak yeni yükler termik cihazlar ve kızaran telli lambalardır , yada güç katsayısı cos ≅ 1 olan yüklerdir
Po ΔP1 ΔP2 P ϕ1 ϕ0 Qo So ΔS1 S0 ΔP1 S1 ΔQ2 ΔS2 ΔS3 S2 Q
Belirli bir güç katsayısına ulaşabilmek için :
a- Sistemden çekilen So görünür gücüne ΔP1 kadar aktif güç eklendiğinde :
Görünür güç So S1’ e ulaşır.
S1 = So + ΔP1 ( 4.21 )
olur. Yada sistemden çekilen görünür güç :
S1 = So + ΔS1 ( 4.22 )
bulunur. Reaktif güç sabit kaldığı halde aktif güç ΔP1 , görünür güç ΔS1 kadar büyür.
b- Sistemden çekilen So görünür gücüne ΔS2 kadar aktif güç eklendiğinde :
Görünür güç So S2’ e ulaşır.
S2 = So + ΔS2 ( 4.23 )
olur , veya sistemden çekilen görünür güç :
S2 = So + ( ΔS1 + ΔS3 ) ( 4.24 )
bulunur. Reaktif güç : ΔQ2 , aktif güç : ( ΔP1 + ΔP2 ) , görünür güçte : ( ΔS1 + ΔS3 ) kadar
büyür.
Bu yöntem ile :
a - da , reaktif güç tüketimini azaltmadan birim aktif güç başına reaktif güç küçültülmüş olur. tan ϕ = 1 1 P P Qo Δ + ( 4.25 )
b - de , reaktif gücü aktif güce oranla daha az bir miktar arttıracak birim aktif güç başına reaktif güç küçültülmüş olur. tan ϕ = ) ( 1 2 1 2 P P P Q Qo Δ + Δ + Δ + ( 4.26 )
dolayısıyla cos ϕ’ de iyileştirilmiş olur.
Bu ifadelerden görüldüğü gibi aktif tüketim artması , görünür gücüde büyütecektir. Bu yöntemle güç katsayısının iyileştirilmesi ancak , üretim ve tesis kapasitelerinin yeterli olduğu yada , görünür gücün talep edilen güçten büyük olduğu hallerde mümkün olur.
4.3.2.2 Şebekeden Çekilen Reaktif Enerji Azaltılarak
Bir tesisin reaktif enerji gereksiniminin bir bölümü , reaktif güç üreten dinamik ve statik faz kaydırıcılarla giderilmesiyle , şebekeden çekilen reaktif enerjide azalır.
Reaktif enerjinin azalmasıyla birim aktif güç başına düşecek reaktif güçte azalmış olacaktır. tan ϕ = o P Q Q0 −Δ 1 ( 4.27 )
bulunur. Dolayısıyla “cos ϕ” de iyileştirilmiş olur.
Aktif güç sabit kaldığı halde , reaktif gücün küçülmesi görünür gücü de küçültecektir. (şekil 4.4 ) Böylece sistemde teni güç katsayısında görünür gücü kadar bir kapasite boşalmış olacaktır.
Şekil.4.4 Sabit aktif güç, küçülen görünür ve reaktif güç.
Güç katsayısının şebekeden çekilen reaktif enerji azaltılarak düzeltilmesi kompanzasyon bölümünde ayrıntılı bir şekilde açıklanacaktır.
4.4 KOMPANZASYON
Genaratörlerde üretilen elektrik enerjisi , iletmekte , dağıtılmakta ve son aşamada yükler tarafından kullanılmaktadır. Güç sistemlerinde aktif güç akışının yanında yükün ve sistemin gereksinimi karşılayabilmek için reaktif güç akışında olmaktadır.Aktif güç kuşkusuz generatörlerden yüklere itilecektir , oysa reaktif güç için böyle bir zorunluluk yoktur. Reaktif gücün gereksinim duyulan noktaya en yakın yerde üretilmesinde elektrik sisteminin en iyi koşullarda çalıştırılması açısından büyük yararları vardır. Elektrik sisteminin ve yüklerin reaktif güç gereksinimlerinin belirli teknikler kullanılarak karşılanması “Kompanzasyon” olarak adlandırılır. Bu işlemin doğal sonucu olarak sistemin belli noktalarında gözüken güç katsayısı ( cos ϕ ) düzeltilecek , diğer bir değişle 1’e yaklaştırılacaktır.
Başlangıçta a.a. dağıtım sistemlerinde genaratörlerin yüklere çok yakın olmalarından dolayı herhangi kompanzasyona gerek duyulmamıştır. Güç sistemleri geliştikçe reaktif enerji senkron motorlar veya küçük senkron kapasitörlerce karşılanmış ve senkron kapasitörleri büyüklükleri zamanla artmıştır. Ekonomik ve verimliliği yüksek kapasitörlerin geliştirilmesi ile , kondansatörler bilhassa dağıtım sistemlerinde reaktif güç üretiminde hızla gelişen bir kullanım sahası bulmuşlardır. Bu alanda en son gelişme statik ( VAR) kompansatörlerdir.
4.4.1 Reaktif Güç İhtiyacının Tespiti
Bir tüketicinin veya tesisin reaktif güç ihtiyacının tespiti için ilk önce söz konusu tüketicinin veya tesisin şebekeden çektiği S1 görünür gücün , buna ait cos ϕ1 güç katsayısının ve
bundan sonra güç katsayısının çıkarılması istenen cos ϕ2 değerinin bilinmesi gereklidir. Güç
katsayısının cos ϕ2 değerine çıkartmak için gerekli reaktif gücü veya kondansatör gücünü tayin
etmek için iki yol vardır :
a-) P1 gücünün sabit kalması :
Bu durumda cos ϕ1 güç katsayısı ile çekilen P1 aktif gücü sabit tutulduğunda cos ϕ2 güç
katsayısı ile çekilen S2 görünür gücü azalır.
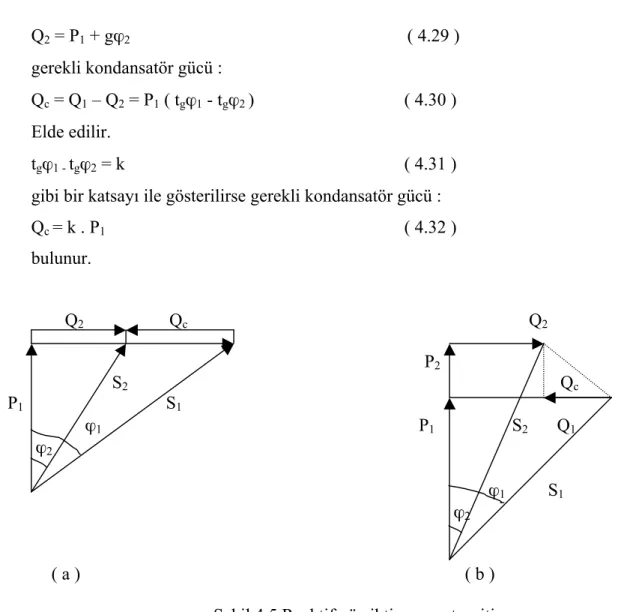
Şekil 4.5 (a)’ ya göre kompanzasyondan önceki reaktif güç : Q1 = P1 + gϕ1 ( 4.28 )
Q2 = P1 + gϕ2 ( 4.29 )
gerekli kondansatör gücü :
Qc = Q1 – Q2 = P1 ( tgϕ1 - tgϕ2 ) ( 4.30 )
Elde edilir.
tgϕ1 - tgϕ2 = k ( 4.31 )
gibi bir katsayı ile gösterilirse gerekli kondansatör gücü :
Qc = k . P1 ( 4.32 ) bulunur. Q2 Qc Q2 P2 S2 Qc P1 S1 ϕ1 P1 S2 Q1 ϕ2 ϕ1 S1 ϕ2 ( a ) ( b )
Şekil 4.5 Reaktif güç ihtiyacının tespiti.
(ilk durumda büyüklükler 1 indisi ile ve güç katsayısı düzeltildikten sonrakiler 2 indisi ile ifade edilir.)
a – Taşınan görünür gücünün azaltılması , aktif güç sabit b - Taşınan aktif gücünün arttırılması , görünür güç sabit
S Görünür güç P Aktif güç Q Reaktif güç
Qc Kondansatör gücü , Qc = Q1 – Q2
b-) S1 görünür gücünün sabit kalması :
Bu durumda cos ϕ1 ile çekilen S1 görünür gücü sabit tutulduğundan cos ϕ2 ile çekilen P2
aktif gücü artar.
Sekil 4.5 (b)’ ye göre , kompanzasyondan önceki reaktif güç :
Q1 = S1 . sin ϕ1 ( 4.33 )
kompanzasyondan sonraki reaktif güç
Q2 = S1 . sin ϕ2 ( 4.34 )
Gerekli kondansatör gücü
Qc = Q1 – Q2 = S1 (sin ϕ1 - sin ϕ2 ) ( 4.35 )
Denklem ( 4.30 )’ daki tan ϕ1 ve tan ϕ2
tan ϕ = ϕ ϕ cos cos 1 2 − ( 4.36 ) bağıntısından yaralanarak cos ϕ1 ve cos ϕ2 den hesaplanabilir.
cos ϕ1 ve cos ϕ2 ise ;
cos ϕ = ϕ 2 1 1 tg + ( 4.37 )
bağıntısından yaralanılarak tan ϕ1 ve tan ϕ2 den hesaplanabilir.
4.4.2 Kompanzasyon Tesislerinin Düzenlenmesi
Kondansatör tesislerinden en büyük yararlanmayı sağlamak maksadiyle , bunların yapacakları göreve göre tesis terinin ve bağlanma şeklinin uygun bir tarzda seçilmesi gerekir.
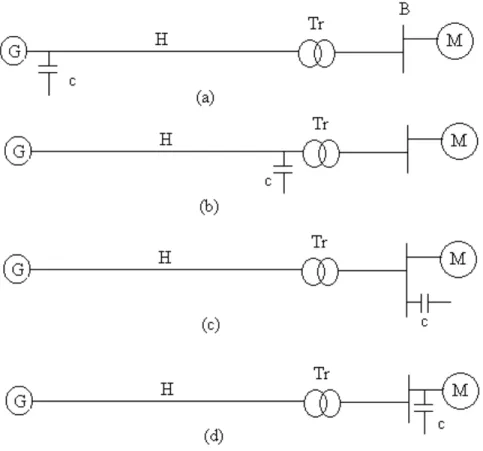
Kompanzasyon için kullanılan kondansatörlerin yerleştirilmesi bakımından en uygun yerin seçilmesi için şekil 4.6’ da bir örnek verilmiştir.
Şekil 4.6 Kompanzasyon tesisi için en uygun yerin seçilmesi. a- Kompanzsayon tesisi yoktur
b- Kondansatör yüksek gerilim tarafına bağlanmıştır. c- Kondansatör alçak gerilim tarafına bağlanmıştır. d- Kondansatör tüketicinin uçlarına bağlanmıştır.
G Genaratör H Besleme hattı Tr Transformatör B Alçak gerilim barası M Motor
C Kondansatör
Burada bir B barasına bağlı bir M kuvvet tüketicisinin , tr transformatörü ve H besleme hattı üzerinden bir santraldeki G genaratörü tarafından beslendiği kabul edilmiştir.
Şekil 4.6 a’da hiçbir kompanzsyon tesisi yoktur. Tüketicinin ihtiyacı olan P aktif gücü ( düz çizgi ) ile Q reaktif gücü (kesikli çizgi ) genaratör tarafından üretilir. Reaktif gücün santralde üretildiğini göstermek için genaratörün yanına bir kondansatör paralel bağlanmıştır.
Şekil 4.6 b’ de kompanzasyon tesisi transformatörün yüksek gerilim tarafına bağlanmıştır; bu durumu her ne kadar genaratör ve besleme hattı reaktif güçten kurtulmuş ise de transformatör hala reaktif akımla yüklenmektedir.
Şekil 4.6 c’de kondansatör alçak gerilim barasına yerleştirilmiştir.
Şekil 4.6 d’de kondansatör doğrudan doğruya tüketici uçlarına bağlanarak tesis reaktif akımdan kurtarılmıştır.
Buradan anlaşılacağı gibi , kondansatörün bağlanacağı en uygun yer , kompanzasyonu yapılacak tüketicinin hemen yanıdır.
Belirli bir kompanzasyon işini yapacak olan kondansatörler üç şekilde düzenlenir. Bunar aşağıda anlatılacaktı.
4.4.2.1 Bireysel Kompanzasyon
Bu kompanzasyon çeşidine , kondansatörler , kompanzasyonu yapılacak olan indüktüf yüklerin ( motorun , trafo , balast ) şalterine bağlanır. En etkili kompanzasyon yöntemidir. Sürekli olarak işletmede bulunan oldukça büyük güçlü tüketicilerin reaktif güç ihtiyacını karşılamak maksadıyla kondansatörler tüketicinin uçlarına doğrudan doğruya paralel bağlanırlar ve müşterek bir anahtar üzerinden tüketici ile işletmeye alınıp çıkarılırlar. [Bayram,2000]
Asenkron motorların kompanzasyonu için kondansatörler , motora paralel bağlanırlar. Şekil_4.7’ de asenkron motorun bireysel kompanzasyonu görülmektedir.
Yıldız Üçgen anahtar ile yol verilen asenkron motorlara kondansatör motor sargılarının uçlarına ( u-x , v-y , w-z uçları ) paralel bağlanırlar. Bu şekilde kondansatörler , motor sargıları ile birlikte devreye alınıp çıkarılırlar.
Yıldız_Üçgen anahtar ile yol verilen asenkron ve sargı uçlarına kompanzasyon yapılan motorlarda , yol verme sırasında tehlikeli bir olay meydana gelebilir. Yıldız bağlama halinde şebekeye bağlanan motorun uçlarındaki kondansatörler dolmuş durumdayken , üçgen bağlama sırasında çok kısa süreli olarak şebekeden ayrılırlar ve üçgen durumda fazları ters olarak yeniden şebekeye bağlanırlar. Bunun sonucunda büyük dengeleme akımları geçer. Bu da motorun ,
kondansatörlerin ve bağlama elemanlarının aşırı zorlanmasına yol açar. Uygun kontaktör kombinasyonları ile bu durum giderilebilir. [Bayram,1983]
Şekil 4.7 Doğrudan şebekeye bağlanan bir asenkron motorun bireysel kompanzasyonu. A Motor koruma anahtarı
M Motor C Kondansatör
Transformatörlerde de bireysel kompanzayon yapmak mümkündür. Transformatörlerin üzerindeki yük sürekli olara değiştiğinden , kompanzayon maksadıyla ihtiyaç duyulan kondansatör gücü , en büyük reaktif güç talebine uygun olarak seçilmez. Tersi bir durumda , düşük yük ihtiyacının olduğu saatlerde aşırı kompanzasyon hali meydana gelebilir. Diğer yandan, şebeke geriliminde harmonikler oluşması durumunda , kondansatör şebekeden aşırı yük çekebilir ve trafoyu aşırı yükleyebilir. Eğer kondansatör gücü , trafonun reaktif güç ihtiyacından büyükse , o zamanda kapasitif yüklemeye maruz kalan trafonun sekonder uçlarında gerilim yüklemeleri meydana gelebilir. Bu da hem trafo , hem de tüketici açısından tehlikelidir. Bu yüzden , elektrik idareleri , trafonun yüküne bağlı olamadan , nominal gücün %5 - %10 değerinde sabit bir kondansatör bağlanmasını önerirler. [Bayram,1983]
Kompanzasyon tesislerinde dikkat edilmesi gereken bir diğer hususta , harmoniklerin meydana geldiği şebekelerde , transformatör ile kondansatörlerin bir seri rezonans devresi
meydana getirmemelidir. Bu sebepten , transformatörlerin kaçak reaktansı ile kondansatörün kapasitif reaktansı rezonans frekansından farklı bir değerde olmalıdır. Şebekelerde , 5. ve 7. harmoniklere sık rastlanır. Ayrıca , 11. ve 13. harmoniklerde söz konusu olabilir.
Deşarj lambaları için de bireysel kompanzasyon yapmak uygun olur. cosϕ’ yi düzeltmek için lambaya seri ve paralel olarak kompanzasyon kondansatörleri bağlanırlar. Kondansatör gücü , lambanın gücüne bağlı olarak seçilir. Ancak alçak basınçlı sodyum buharlı lambalarla neon lambalarda akım sınırlayıcı direnç olarak kaçak akılı transformatörler kullanılır. Bunlarda balastlar gibi indüktüf karakterlidir. Bunların güç katsayıları ortalama 0,3 iken balastlarınki, tiplerine göre 0,4 – 0,6 arasında değişir.
Bireysel kompanzasyonun, sisteme olan faydaları dışında, bir takım dezavantajları da söz konusudur. Bu kompanzasyon tipi pahalıdır. Herhangi bir ayarlama için uygun değildir. Sadece sabit güçte devamlı çalışan tüketiciler için ekonomik ve uygundur. [Köksal,1993]
4.4.2.2 Grup Kompanzasyon
Bu kompanzasyon metodunda, kondansatörler, toplu haldeki indüktif yükleri devreye sokan sistemlere bağlanırlar. Kumanda panosu içinden ışık linyeleri veya motor gurupları buna örnektir.
Birçok tüketicinin bulunduğu tesiste her tüketicinin ayrı ayrı kondansatörler ile donatılacağı yerde bunların müşterek bir kompanzasyon tesisi tarafından daha pratik ve ekonomik sonuçlar verir.
Şekil 4.8’ de gurup kompanzasyonu yapılmış bir tesis görülmektedir. Burada kondansatörler , açma ve kapama sırasında meydana gelen arkları ortadan kaldırmak amacıyla , özel anahtarlar ile donatılmışlardır. Anahtarlar açıldığında , kontak , bir deşarj direnci üzerinden topraklanır.
Bu tür kompanzasyon tesislerinde , tesisi kısa devreye karşı korumak amacıyla , her bir kondansatör , bir sigorta üzerinden barayla irtibatlandırılır. [Köksal,1993]
Bazı durumlarda kondansatörler toplu bir motor koruma anahtarı veya yüksek gerilim güç anahtarı üzerinden şebekeye bağlanırlar. Şekil 4.9’ da gösterilen bu tesiste kademeli bir kompanzasyon imkanı yoktur.
Şekil 4.8 Gurup kompanzasyonu.
Şekil 4.9 Sabit kondansatörlü gurup kompanzasyonu .
Şekilden de görüldüğü gibi , böyle bir tesis , akım ve gerilim ölçme cihazları ile de donatılabilir.
İşletmelerin büyük harcamalardan kurtulması , ayrıca çıkabilecek arızalardan en az derecede etkilenmesi , anca gurup kompanzasyonu yapmakla mümkün olacaktır.
4.4.2.3 Merkezi Kompanzasyon
Bu kompanzasyon şekil , değişken yük şartlarında otomatik olarak uygunluk sağlayabilen, gurup kompanzasyonun daha gelişmiş bir haldir.
Merkezi kompanzasyonda , tüketici birim sayısı fazladır. Fakat bunların hepsinin sabit güçte ve sürekli olarak devrede bulunamaz. Bu yüzden , kondansatör gücünü , değişken kompanzasyon uydurmak gerekir. Bu amaçla , merkezi kompanzasyonda bir ayar düzeni kullanılır. Böylece , gerek düşük ve gerekse aşırı kompanzasyona sebebiyet verilmez. Şekil 4.10’ da bir merkez kompanzasyon tesisi görülmektedir. Burada güç katsayısını devamlı olarak kontrol eden bir cihaz yardımı ile ihtiyaca göre kondansatör gurupları devreye sokulup çıkarılırlar.
Şekil 4.10 Merkezi kompanzasyon.
4.4.2.4 Aşırı Kompanzasyon
Bireysel kompanzasyonda kondansatör , tüketicinin ihtiyacını tam olarak karşılayacak şekilde seçildiğinden ve tüketiciye paralel bağlanarak onunla birlikte devreye sokulup çıkarıldığından , burada reaktif güç ihtiyacı ile üretin birbirini tam olarak karşılar ve güç katsayısı istenen değerde sabit tutulur. Halbuki gurup ve özellikle merkezi kompanzasyonda durum
farklıdır ; reaktif güç ihtiyacı devamlı olarak değişir. Eğer kompanzasyon için öngörülmüş kondansatör gücü sabit kalırsa , reaktif güç ihtiyacının arttığı zamanlarda , kompanzasyon kondansatörleri ihtiyacı karşılayamaz , eksik kalan reaktif güç ihtiyacı şebekeden çekilir. Bu durumda güç katsayısı ( cosϕ ) düşer ve kompanzasyon görevi yerine getirilmemiş olur.
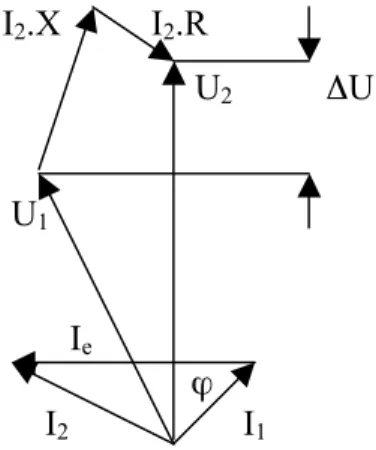
Düşük yükle çalıştığı zamanlarda ise , paralel bağlı kondansatör gücü ihtiyacı karşıladıktan sonra, başka reaktif güç fazlası baş gösterir ve şebekeye reaktif güç pompalanır. Bu durumda , tesisin bağlı bulunduğu transformatör. İstasyonunda gerilim yükselir , buna aşırı kompanzasyon denir. Bu aşırı kompanzasyon durumunda ,tüketici geriliminde önemli bir artış olur. Şekil 4.11’ de aşırı kompanzasyon etkisi fazör diyagramı ile gösterilmiştir.
I2.X I2.R U2 ΔU U1 Ie ϕ I2 I1
Şekil 4.11 Aşırı kompanzasyon fazör diyagramı. I1 Yük akımı
Ic Kondansatör akımı
I2 Şebeke akımı
U1 Besleme gerilimi
U2 Tüketici gerilimi
R Hat ve trafo direnci X Hat ve trafo reaktansı ΔU Tüketici gerilim yüklenmesi
Aşırı kompanzasyonda ΔU gerilimi , kondansatör gücü ile transformatör oranına bağlıdır. Gerilim artışının yüzde cinsinden değeri , büyük bir yaklaşıkla
( % ) U U Δ = 100 x U . T c S Q ( 4.38 )
ifadesine göre hesaplanır. Burada Qc , kVAR cinsinden kondansatör gücü , St , kVA cinsinden
trafo gücü ve Ux , yüzde cinsinden kondansatör yerine bağlı olarak trafo akımına indirgenmiş
reaktans üzerindeki gerilim düşümüdür.
Aşırı kompanzasyon sonucu meydana gelen gerilim artışı o kadar büyük boyutlara ulaşır ki , kurulu tesisler bundan büyük zarar görebilir. Bu durumu önlemek için , kondansatör bataryasının şebekeye reaktif akım verilmeyecek ayarlanması gerekir. Bunun için kompanzasyon için kullanılan kondansatörlerin , çeşitli sayılarda gruplandırılması ve ihtiyaca göre devreye alınıp çıkarılması gerekir.
Büyük tesislerde , bu işleri yapmak amacıya , bir ayar düzeni kullanılır. Bu şekilde , otomatik olarak , çok hassa ve güvenilir bir şekilde ayar yapılması sağlanmış olur.
4.4.3 Döner Makineler ile Kompanzasyon
Döner makinelerde kompanzasyon eski bir yöntemdir. Bu yöntemde iki metottan faydalanılır ; senkron motorlar ve iki makine metodu.
4.4.3.1 Senkron Motorlar
Güç katsayısının düzeltilmesi ile aktif gücün artması sağlamak için senkron motorlar kullanılır. Bu amaçla kullanılan senkron motorlara senkron kompansatör veya senkron kondansatör adı verilir. şekil 4.12’ de üç fazlı bir şebekeye bağlanmış geri güç katsayılı (endüktif) bir alıcı ile aynı şebekeye bağlanmış üç fazlı bir senkron motor görülüyor. [Peşint,1996]
Şekil 4.12 Senkron motor ile güç katsayısının düzeltilmesi.
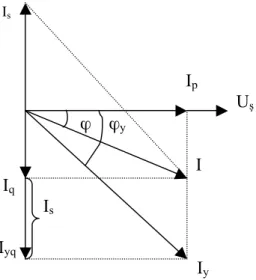
Senkron motorun boşta fazla uyartımlı çalıştığı ve kayıpların olmadığını düşünelim. Bu durumda senkron motorun akımı gerilimden 90o ilerdedir. Şekil 4.13’ de yük akımı Iy , şebeke
gerilimi Uş den ϕy kadar geride gösterilmiştir. Senkron motorun akımı Is ise , gerilimden 90o
ilerdedir. Devreye senkron motor bağlamadan önce şebekeden çekilen akım Iy kadar iken ,
senkron motor bağlandıktan sonra çekilen akım I kadar olmaktadır. Is Ip Uş ϕ ϕy I Iq Is Iyq Iy
Şekil 4.13 Senkron kompansatör.
Iy akımının iki bileşeni Iyp aktif , Iyq ise reaktif bileşen olarak tanımlanır. I akımının aktif
Ip = Iyp olduğuna göre , senkron motor bağlandıktan sonra da çekilen güç aynı kalmıştır.
Çünkü senkron motorun aktif gücü sıfırdır.
Iyp = Iy cosϕy ; Ip = Ip . cosϕ ; Ip = Iyp ( 4.39 )
olduğundan ,
Iy . cosϕy = I cosϕ dir. Iy > I ( 4.40 )
Olması bize senkron motor bağlandıktan sonra şebekeden çekilen akımın azaldığını gösterir. Senkron motorların en önemli sakıncası , dengesiz yükü karşılayamamasıdır. Bilindiği , gibi uyarma ayarı ile her üç fazda da gerilim aynı zamanda değiştirilir ; halbuki ark fırınında baş gösteren dengesizlikler her üç fazın ayrı ayrı işlem görmesini gerektirir. Bu yüzden senkron motorlar haddehaneler için daha everişlidir. [Bayram,1983]
Senkron motorlarının kayıplarının yüksek ve tesisi masraflarının büyük olması bir sakınca olarak görülebilir. Ayrıca makinede bir hatanın olması halinde kompanzasyon imkanın tamamı birden ortadan kalkar.
4.4.3.2 İki Makine Metodu
Dengesiz reaktif gücü kompanze etmek ve dengesiz aktif gücü dengelemek için seri bağlı iki makine montajından faydalanılır. Bunun için senkron kapasitöre seri bir asenkron makine bağlanır. Bu asenkron makine , senkron kapasitörü tahrik eder ve tüketici akımının hemen hemen tamamı bunun üzerinden geçer ( şekil 4.14 )
7a Senkron kompansatör 7b Asenkron motor QL Reaktif güç
I2 Ters akım bileşeni
Asenkron motorun reaktansı büyük olduğundan , tüketicinin ters akım bileşenin şebekeden çekilmesin önler. Bu akım bileşeni senkron faz kaydırıcının küçük olan ters reaktansı üzerinden geçer. Tüketicinin reaktif güç ihtiyacını senkron makine ve ters akım bileşenini de asenkron makine sağlar.
İki makine metodunun başka bir şekli ise birbirine mekanik olarak birleştirilmiş ve elektiriki olarak seri bağlanmış iki senkron makineden oluşur. Makinelerden ilki senkron faz kaydırıcı diğeri ise ters akım genaratörü olarak çalışır. Senkron faz kaydırıcı normal bir uyarma sargısı ile donatılmış olduğu halde ikinci makinede , birbirinden 900 faz farkı ile iki uyarma
sargısı vardır. İkinci makinede statör sargıları , birincidekine göre ters sırada bağlamıştır. Bu makine grubunun prensip bağlanma şeması şekil 4.15 de gösterilmiştir.
Şekil 4.15 İki senkron makineden oluşan iki makine sistemi. 7a Senkron faz kaydırıcı
7b Ters senkron makine QL Reaktif güç
Ters senkron makine , birbirine göre 900 düzenlenen uyarma sargısı ve statör sargılarının faz sıralarının değişik olması sebebi ile , amplitüd ve faz açısı bakımından her türlü ters akım bileşenini üretecek durumdadır. Burada da birinci makine tüketicinin reaktif güç ihtiyacını ve ikincisi ters akım bileşenini karşılar. Bu sayede alternatif tüketicisini kompoze etmek ve dengelemek mümkündür.
4.4.4 Ayarlanabilen Kombine Kompanzasyon Tesisleri
Bu yöntem daha çok ark fırınlarının , hadde makinelerinin kompanzasyonun da bir yöntemdir. Herhagi bir sabit kondansatör bataryası ile kompanzasyon sağlandığı gibi , kondansatörlerin ve reaktörlerin kombine edilmesi ve bunlardan ya birinin veya ikisinin güçlerinin ihtiyaca göre ayar edilmesi ile ideal bir kompanzasyon sağlanabilir.
Şebeke meydana gelen güç , genellikle endüktif karakterdedir ve bunu kompanze etmek için , kapasitif güç üreten cihazlardan , yani kondansatörlerden , gelişmiş statik var sistemlerden yararlanılır. Sürekli olarak değişim gösteren var ( voltamper reaktif ) üretimi ve tüketimi , önceleri aşırı veya düşük uyarlanmış senkron makinelerle , sonraları reaktörler ve bunlara bağlı kondansatörlerle yapılmıştır. Son yıllarda , reaktif gücün kontrolünde , yüksek güçlü yarı iletkenlerin kullanılması yaygınlaşmıştır. Yarı iletkenlerin kullanılmasıyla yapılan kompanzasyon sistemlerine “statik VAR Kompansatörleri” adı verilir.
Bir statik VAR kompansatörü ( SVK ) , kapasitör , rektör , transformatör , ve statik anahtar gibi elemanların hızlı , sürekli ve denetlenebilir bir şönt reaktif güç kompanzasyonunu sağlamak amacıyla bir araya getirilmesinden oluşan sistemdir. [Ermiş,1983] Çok çeşitli statik VAR kompansatörü olmasına karşın bunların en yaygın kullanılan belli başlıları şöyle sıralanabilir.
• Tristör anahtarlamalı kapasitör ( TAK ) • Tristör anahtarlamalı reaktörler ( TAR ) • Tristör denetimli reaktör ( TDR )
• Sabit kapasitör - tristör denetimli reaktör ( SK / TDR )
• Tristör anahtarlamalı kapasitörler - tristör denetimli reaktörler ( TAK / TDR )
• Tristör anahtarlamalı kapasitörler - tristör anahtarlamalı reaktörler - tristör denetimli reaktör ( TAK / TAR / TDR )
Tristörlü statik reaktif güç kompansatörlerinin çok kısa zamanda tepki gösterme yeteneği ( yarım çevrim ) , her fazın ayrı ayrı denetlenebilirliği özelliği ve dolayısıyla dengesiz yükleri kompaze etme yeteneği vardır.
Başta da belirtildiği gibi , statik var kompansatörleri , ark ocağı gibi endüstriyel yüklerin sebep olduğu olumsuzlukları ( gerilim dalgalanmaları vb. ) önlemek maksadıyla kullanılır. Bilindiği gibi ark ocakları , reaktif güçte hızlı bir değişmeye sebep olur üç faz arasında yük dengesizliği meydana getirir. Bunu gidermek için , bu tip cihazlardan faydalınır. Ayrıca statik var kompansatörleri , iki AC sistem arasındaki bağlantının karalılığını arttırmak için , gerilim regülasyonuda yaparlar.
Ana yük barasının , üretim yerinden uzak mesafede bulunması halinde , yük ucunda yeterli bir gerilim desteği bulunmadığı sürece , bu uçta gerilim karasızlığı sorunu meydana gelir. Yükün reaktif güç talebini , uygun miktarda reaktif güç üreterek karşılayacak bir eleman kullanıldığında , gerilim yetersizliği sorunu çözülecektir. Bu gerilim desteği sağlamada kullanılan statik var kompansatörleri , hatların daha verimli işletilmesi mümkün olmaktadır. [İnan,1993]
Statik reaktif güç kompansatörlerinin iletim sistemlerinde kullanılmasıyla şu yararlar sağlanabilecektir.
• İletim hatlarını kararlı durumda aktif güç iletim kapasitelerini arttırmak ,
• İletim hattının geçici durum karalılığını iyileştirmek ( kısa devre , yükün devre dışı kalması , hattın devreye alınması vb. geçici durumlarda ) ,
• Değişen yük , az yük , hattın devreye alınması , gibi çalışma kurallarında gerilim düzenlemesi sağlamak.
İstenilen bir sistem için uygun olan kompansatörün seçimi , çeşitli kriterlere bağlıdır. Bunlar ; kayıp karakteristiği , reaktif güç gereksinimini , harmonik üretimi ve maliyetidir. Bunlar göz önüne alınarak , statik var sistemleri , şu başlıklar altında işlenebilir ;
4.4.4.1 Tristör Anahtarlamalı Reaktörle Dengelenen Sabit Kondansatörle Kompanzasyon Bu kompanzasyon sistemi , reaktif güç değişimi çok hızlı olan yüklerde mesela ark ocaklarında kullanılabilir. Bunda amaç , ocağın reaktif gücünün ani değerini ölçmek ve buna göre gerekli endüktif gücü , gerekli sayıda reaktörü devreye sokup çıkarmakla sağlamaktır. Bu şekilde her an ocak gücüyle reaktör gücünün toplamı sabit tutulur ve sabit kondansatör tarafından