1
PROPOSAL
PENELITIAN UNGGULAN
DANA ITS TAHUN 2020
Desain Kontroller Motor BLDC 5 kW untuk Aplikasi
Kendaraan Listrik
Tim Peneliti:
Feby Agung Pamuji, ST., MT. Ph.D.(Teknik Elektro/FTE/ITS)
Dimas Anton Asfani, S.T, M.T, Ph.D(Teknik Elektro/FTE/ITS)
Dr. Dimas Fajar Uman Putra, S.T, M.T (Teknik Elektro/FTE/ITS)
Dedet Candra Riawan, ST., M.Eng., Ph.D.(Teknik Elektro/FTE/ITS)
DIREKTORAT PENELITIAN DAN PENGABDIAN KEPADA MASYARAKAT
INSTITUT TEKNOLOGI SEPULUH NOPEMBER 2020
2 DAFTAR ISI DAFTAR ISI………. 2 RINGKASAN……… 3 BAB I PENDAHULUAN………. 4 1.1 Latar Belakang... 4
1.2 Rumusan dan Batasan Masalah………... 5
1.3 Tujuan Penelitian………. 5
1.4 Relevansi……….. 5
1.5 Target Luaran………... 5
BAB II TINJAUAN PUSTAKA………... 6
2.1 Motor BLDC………... 6
2.2 Karakteristik Torsi/Kecepatan……… 9
2.3 Pengaturan Kecepatan Motor BLDC……….. 10
2.4 Metode Kontrol Tegangan dengan PWM………... 12
2.5 Sistem Kontrol Kecepatan Motor BLDC……… 12
2.5.1 PID ... 12
2.5.2 Fuzzy Logic Controler ... 13
2.6 Karakteristik Respon………... 14
BAB III METODE PENELITIAN……… 15
BAB IV ORGANISASI TIM, JADWAL DAN BIAYA PENELITIAN……….. 19
4.1 Organisasi Tim………. 19
4.2 Jadwal Penelitian………. 21
4.3 Anggaran Biaya………... 22
3
RINGKASAN
Harga minyak sebagai bahan bakar kendaraan pada era sekarang ini adalah tidak stabil dan cenderung mengalami kenaikan. Selain itu desain dari kendaraan bermotor konvensional yang tidak ramah lingkungan dan memiliki effisiensi yang jelek semakin memperkuat penyebab untuk beralih menggunakan kendaraan listrik. Institut Teknologi Sepuluh Nopember turut ambil alih dalam pengembangan kendaraan listrik dengan produknya yaitu GESITS yang merupakan sepeda motor listrik. Motor yang digunakan pada GESITS adalah motor BLDC. Untuk memaksimalkan kinerja motor BLDC dibutuhkan kontrol kecepatan yang baik. Salah satu jenis metode kontrol kecepatan pada motor BLDC adalah metode kontrol tegangan dengan menggunakan metode PWM. Pada penelitian ini akan didesain sistem kontrol kecepatan dengan metode PWM berbasis kontroler Fuzzy.
Pada perancangan sistem kontrol dengan menggunakan logika fuzzy terdapat tiga proses, yaitu fuzzifikasi, logika pengambilan keputusan / evaluasi rule dan defuzzifikasi. Masing-masing proses tersebut akan mempengaruhi respon sistem yang dikendalikan. Defuzzifikasi merupakan langkah terakhir dalam suatu sistem logika fuzzy dengan bertujuan mengkonversi setiap hasil dari inference engine yang diekspresikan dalam bentuk fuzzy set ke suatu bilangan real. Hasil konversi tersebut merupakan aksi yang diambil oleh sistem kendali logika fuzzy. Oleh karena itu pada penelitian ini di desain sistem kontrol kecepatan motor BLDC berbasis Fuzzy Logic Controller untuk mengetahui bagaimana respon kecepatan dari motor BLDC.
4
BAB I PENDAHULUAN 1.1 Latar Belakang
Pada era seakarang ini harga minyak sebagai bahan bakar yang umum digunakan dalam kendaraan bermotor adalah cenderung naik. Selain itu desain kendaraan bermotor konvensional adalah tergolong lama, sehingga menimbulkan kecenderungan untuk mencari kendaraan yang lebih efisien dan berbasis sumber ramah lingkungan [1]. Kondisi tersebut akan mengarah pada pengembangan kendaraan listrik. Institut Teknologi Sepuluh Nopember (ITS) mempunyai peran alih dalam pengembangan kendaraan listrik di indonesia yaitu dengan salah satu produknya adalah Garasindo Electric Scooter (GESITS). GESITS merupakan sepeda motor litrik. Jenis motor yang digunakan pada kendaraan GESITS adalah motor BLDC dengan daya 5 kW.
Motor DC Brushless atau BLDC merupakan jenis motor DC dengan komutasi elektrik. Motor jenis ini mempunyai beberapa sifat diantaranya adalah nilai effisiensi tinggi, range kecepatan yang besar, respon dinamik yang cepat, umur operasai yang lama, tingkat keandalan tinggi, dan dapat dikontrol secara akurat [1, 2]. Karena sifat – sifat tersebut motor BLDC banyak digunakan dalam berbagai bidang, salah satunya digunakan pada sepeda motor listrik.
Pada motor BLDC proses komutasi dilakukan secara elektrik. Salah satu metode untuk megatur kecepatan motor BLDC adalah dengan cara mengatur tegangan pada sisi stator dengan metode PWM. Metode tersebut adalah mempunyai struktur yang tidak rumit dan sudah umum diaplikasian pada motor BLDC [3]. Variasi kecepatan didapatkan dengan mengatur duty cylce pada PWM. Diperlukan sistem kontrol untuk mengatur duty cycle pada PWM. Sistem kontrol yang umum digunakan pada BLDC adalah PID [1]. Namun PID mempunyai beberapa kekurangan. Salah satu kekurangan PID adalah perubahan secara tiba – tiba pada set-point dan variasi pada parameter plant yang dikontrol, membuat respon dari PID menjadi buruk [4]. Kontroler Fuzzy mempunyai respon yang baik dalam melakukan kontrol pada sistem yang kompleks dan tidak linear, jika dibandingkan dengan PID [5]. Pada perancangan sistem kontrol dengan menggunakan logika fuzzy terdapat tiga proses, yaitu fuzzifikasi, logika pengambilan keputusan / evaluasi rule dan defuzzifikasi. Masing-masing proses tersebut akan mempengaruhi respon sistem yang dikendalikan. Defuzzifikasi merupakan langkah terakhir dalam suatu sistem logika fuzzy dengan bertujuan mengkonversi setiap hasil dari inference engine yang diekspresikan dalam bentuk fuzzy set ke suatu bilangan real. Hasil konversi tersebut merupakan aksi yang diambil oleh sistem kendali logika fuzzy. Oleh karena itu pada penelitian ini di desain sistem kontrol kecepatan motor BLDC berbasis Fuzzy Controller untuk mengetahui bagaimana respon kecepatan dari motor BLDC.
5
1.2 Rumusan dan Batasan Masalah
1. Mendesain skema pengaturan tegangan motor BLDC menggunakan metode PWM
2. Mendesain sistem kontrol kecepatan motor BLDC berbasis Fuzzy Logic Controller.
3. Menganalisis hasil respon kecepatan pada sistem kontrol kecepatan berbasis Fuzzy Logic Controller.
1.3 Tujuan Penelitian
1. Mendapatkan skema pengaturan tegangan motor BLDC menggunakan metode PWM.
2. Mendapatkan parameter-parameter dari sistem kontrol kecepatan motor BLDC berbasis Fuzzy Logic Controller.
3. Memperoleh kriteria respon kecepatan pada sistem kontrol berbasis Fuzzy Logic Controller.
1.4 Relevansi
1. Sebagai referensi bagi peneliti lain yang ingin melakukan penelitian tentang sistem kontrol kecepatan motor BLDC berbasis Fuzzy Logic Controller. 2. Sebagai referensi untuk pengembangan sistem kontrol kecepatan motor
BLDC pada kendaraan GESITS.
1.5 Target Luaran
1. Terciptanya prototipe kontrol kecepatan motor DC brushless berbasis Fuzzy Logic Controller.
2. Artikel ilmiah yang dipublikasikan di jurnal Internasional Terindeks Scopus.
6
BAB II
TINJAUAN PUSTAKA
2.1 Motor BLDC
Bagian utama motor BLDC diantaranya adalah stator dan rotor. Pada motor BLDC 3 fasa, mempunya 3 kumparan pada pada bagian stator. Terdapat 2 tipe kumparan stator yaitu sinusoidal dan trapezoidal [2]. Kedua tipe tersebut dikategorikan berdasarkan bentuk dari sinyal BEMF (Back Electromotive Force). Bentuk dari sinyal BEMF ditentukan oleh perbedaan hubungan kumparan dan jarak dari celah udara [2]. Motor dengan bentuk sinyal BEMF sinusoidal menghasilkan torsi elektromagnetik yang lebih halus jika dibandingkan dengan motor dengan bentuk sinyal trapezoidal, namun harganya akan menjadi lebih mahal karena dibutuhkan komponen tambahan seperti chopper windings [2]. Pada motor BLDC jenis kumparan statornya adalah trapezoidal. Pada rotor terdapat shaft dan permanent maghnet. Prinsip kerja motor BLDC adalah berdasarkan gaya tarik dan gaya lawan antara kutub maghnet [8]. Arus melewati salah satu dari kumparan stator, dan menghasilkan kutub magnet yang akan menarik kutub yang berlawanan dari magnet permanent yang terdekat. dengan secara bergantian mengalirkan arus pada kumpara stator, maka akan menyebabkan rotor akan berputar [2].
Gambar 2. 1 Skema Rotasi Rotor [2].
Persamaan diferensial dari motor BLDC 3 fasa dengan hubungan stator wye, jenis kumparan full-pitch , mempunyan jenis rotor salient dan hall sensor adalah terpisah sebesar 120˚ elektrik dapat diturunkan sebagai berikut [9]:
Tegangan tiap fasa pada kumparan motor BLDC dapat dituliskan dalam
𝑢𝑥 = 𝑅𝑥𝑖𝑥+ 𝑒𝜓𝑥 (2.1)
Dimana 𝑢, i,dan R adalah tegangan, arus, dan resistansi pada fasa x (fasa A, B, dan C). Sementara 𝑒𝜓 adalah emf yang terinduksi pada fasa x. Besar emf yang
terinduksi adalah sebanding dengan laju perubahan fluks. 𝑒𝜓𝑥 = 𝑑𝜓𝑥
𝑑𝑡 (2.2)
Kemudian besar fluks pada fasa A adalah :
𝜓𝐴 = 𝐿𝐴𝑖𝐴 + 𝑀𝐴𝐵𝑖𝐵+ 𝑀𝐴𝐶𝑖𝐶+ 𝜓𝑃𝑀(𝜃), (2.3)
Dimana 𝜓𝑃𝑀 adalah flux linkage yang disebabkan oleh permanent magnet pada fasa
A, 𝜃 adalah sudut yang menyatakan posisi rotor, 𝐿𝐴 adalah induktasi diri, 𝑀𝐴𝐵 dan
𝑀𝐴𝐶 adalah induktansi bersama fasa A dengan fasa B dan C. Besar dari 𝜓𝑃𝑀(𝜃) bergantung pada distribusi medan magnet dari magnet permanen pada celah udara. Komponen radial dari medan magnet pada celah udara yang ditimbulkan oleh
7
magnet permanen tedistribusi secara trapezoidal sepanjang permukaan dalam dari stator seperti yang ditunjukkan gambar 2.2.
Gambar 2. 2 Distribusi Fluks pada Fasa A [9].
Seperti yang ditunjukkan oleh gambar 2.2, ketika rotor berputar berlawanan arah jarum jam, kumparan AX bergerak searah sepanjang sumbu 𝜃. Lalu nilai efektif dari fluks pada fasa A akan berubah sejalan dengan perubahan posisi rotor. Besarnya flux linkage pada fasa A karena magnet permanen adalah sebanding dengan banyaknya lilitan (N) dan nilai fluks pada fasa A yang ditimbulkan karena magnet permanen. Apabila rotor sedang berada pada posisi 𝑎, maka besarnya fluks linkage pada fasa A adalah:
𝜓𝑃𝑀(𝑎) = 𝑁𝑆 ∫ 𝐵(𝜃)𝑑𝜃
𝜋 2+𝑎
−𝜋2+𝑎 (2.4)
Dengan 𝐵(𝜃) adalah kerapatan fluks radial pada celah udara yang disebabkan oleh magnet permanen pada rotor,
Dengan mensubsitusikan persamaan (2.2)- (2.4) ke dalam (2.1) maka didapatkan persamaan: 𝑢𝐴 = 𝑅𝑖𝐴+ 𝑑 𝑑𝑡 (𝐿𝐴𝑖𝐴 + 𝑀𝐴𝐵𝑖𝐵+ 𝑀𝐴𝐶𝑖𝐶+ 𝜓𝑃𝑀(𝜃)) = 𝑅𝑖𝐴 + 𝑑 𝑑𝑡(𝐿𝐴𝑖𝐴 + 𝑀𝐴𝐵𝑖𝐵+ 𝑀𝐴𝐶𝑖𝐶) + 𝑑 𝑑𝑡( 𝑁𝑆 ∫ 𝐵(𝜃)𝑑𝜃 𝜋 2+𝑎 −𝜋2+𝑎 ) = 𝑅𝑖𝐴+ 𝑑 𝑑𝑡(𝐿𝐴𝑖𝐴 + 𝑀𝐴𝐵𝑖𝐵+ 𝑀𝐴𝐶𝑖𝐶) + 𝑒𝐴 (2.5)
Apabila jenis rotor dari motor BLDC ada non salient, maka nilai induktansi diri dan bersama adalah tetap dan tidak tergantung pada posisi rotor. Hal tersebut dikarenakan pada magnet permanen jenis non salient fluks yang ditimbulkan adalah bersifat isotropic. Kemudian apabila kumparan fasa stator adalah simetris maka 𝐿𝐴 = 𝐿𝐵 = 𝐿𝐶 = 𝐿 dan 𝑀𝐴𝐵 = 𝑀𝐵𝐴 = 𝑀𝐵𝐶 = 𝑀𝐶𝐵 = 𝑀𝐴𝐶 = 𝑀𝐶𝐴 = 𝑀. Sehingga persamaan (2.5) dapat dituliskan menjadi :
𝑢𝐴 = 𝑅𝑖𝐴+ 𝐿𝑑𝑖𝐴 𝑑𝑡 + 𝑀 𝑑𝑖𝐵 𝑑𝑡 + 𝑀 𝑑𝑖𝐶 𝑑𝑡 + 𝑒𝐴 (2.6)
8 Dengan, 𝑒𝐴 = 𝑑 𝑑𝑡( 𝑁𝑆 ∫ 𝐵(𝑥)𝑑𝑥 𝜋 2+𝜃 −𝜋2+𝜃 ) = 𝑁𝑆 [𝐵 (𝜋 2+ 𝜃) − 𝐵 (− 𝜋 2+ 𝜃)] 𝑑𝜃 𝑑𝑡 = 𝑁𝑆𝜔[𝐵 (𝜋 2+ 𝜃) − 𝐵 (− 𝜋 2 + 𝜃)] (2.7)
Besaran 𝜔 adalah kecepatan sudut dari motor. Pada gambar 2.2 Terlihat bahwa 𝐵(𝜃) memiliki periode sebesar 2𝜋 dan 𝐵(𝜃 + 1)=−𝐵(𝜃) maka :
𝑒𝐴 = 𝑁𝑆𝜔[𝐵 (𝜋 2+ 𝜃) − 𝐵 ( 𝜋 2+ 𝜃 + 𝜋 − 2𝜋)] = 2𝑁𝑆𝜔[𝐵 (𝜋 2+ 𝜃) (2.8)
Nilai back-EMF adalah mendahukui sebesar 90˚ elektrik dari kerapatan medan pada celah udara, dan 𝑒𝐴 dapat dinyatakan sebagai :
𝑒𝐴 = 2𝑁𝑆𝜔𝐵𝑚𝑓𝐴(𝜃) = 𝜔𝜓𝑚𝑓𝐴(𝜃) (2.9)
Dimana 𝐵𝑚 dan 𝜓𝑚 adalah nilai maksimum dari kerapatan medan pada celah udara dan nilai maksimum dari flux linkage pada tiap fasa stator. Kemudian 𝑓𝐴(𝜃) adalah fungsi dari gelombang back-EMF dari fasa A dan memiliki nilai minimum dan maksimum adalah -1 dan 1. Pada motor BLDC 3 fasa dengan kumparan stator adalah simetris maka untuk fasa B dan C
𝑓𝐵(𝜃) = 𝑓𝐴(𝜃 −2𝜋
3) (2.10)
𝑓𝐶(𝜃) = 𝑓𝐴(𝜃 + 2𝜋
3) (2.11)
Pada motor BLDC 3 fasa memiliki rangkaian eqivalen pada sisi stator adalah sebagai berikut:
Gambar 2. 3 Rangkaian Ekivalen Motor BLDC 3 Fasa [9] .
9
𝑖𝐴+ 𝑖𝐵+ 𝑖𝐶 = 0 (2.12)
Maka persamaan dapat diserdehanakan menjadi, 𝑢𝐴 = 𝑅𝑖𝐴+ (𝐿 − 𝑀)
𝑑𝑖𝐴
𝑑𝑡 + 𝑒𝐴 (2.13)
Sehingga persamaan matriks tegangan fasa pada tiap kumparan stator motor BLDC adalah sebagai berikut :
[ 𝑢𝐴 𝑢𝐴 𝑢𝐴 ] = [ 𝑅 0 0 0 𝑅 0 0 0 𝑅 ] [ 𝑖𝐴 𝑖𝐴 𝑖𝐴 ] + [ 𝐿 − 𝑀 0 0 0 𝐿 − 𝑀 0 0 0 𝐿 − 𝑀 ] 𝑑 𝑑𝑥[ 𝑖𝐴 𝑖𝐴 𝑖𝐴 ] + [ 𝑒𝐴 𝑒𝐴 𝑒𝐴 ] (2.12)
Sedangkan persamaan matriks untuk tegangan antar fasanya didapatkan dari pengurangan tegangan antar fasa dan didapatkan :
[ 𝑢𝐴𝐵 𝑢𝐴𝐶 𝑢𝐶𝐴 ] = [ 𝑅 −𝑅 0 0 𝑅 −𝑅 −𝑅0 0 𝑅 ] [ 𝑖𝐴 𝑖𝐴 𝑖𝐴 ] + [ 𝐿 − 𝑀 𝑀 − 𝐿 0 0 𝐿 − 𝑀 𝑀 − 𝐿 𝑀 − 𝐿 0 𝐿 − 𝑀 ] 𝑑 𝑑𝑥[ 𝑖𝐴 𝑖𝐴 𝑖𝐴 ] + [ 𝑒𝐴− 𝑒𝐵 𝑒𝐵− 𝑒𝐶 𝑒𝐶− 𝑒𝐴 ] (2.13)
Sementara torsi elektromagnetik dapat dirumuskan [6] : 𝑇𝑒𝑚 = 𝐽𝑑𝜔𝑡
𝑑𝑡 + 𝐵𝜔𝑟 +TL (2.14)
Dimana J, B, 𝜔𝑟 dan TL masing – masing adalah momen Inersia, koefisien
gesek, kecepatan sudut, dan torsi beban dari motor.
2.2 Karakteristik Torsi/Kecepatan
Gambar 2. 4 Kurva Karakteristik Torsi/Kecepatan motor BLDC [10].
Pada gambar 2.4 merupakan karakterisitik torsi/kecepatan dari motor BLDC secara umum. Terdapat dua jenis torsi pada motor BLDC yaitu peak torque dan rated torque. Parameter tersebut dijadikan acuan didalam menentukan spesifikasi
10
motor BLDC. Pada saat operasi secara kontinyu motor dapat diberi beban hingga menacapai nilai dari rated torque. Apabila motor dioeprasikan dalam range diam hingga kecepatan ratingnya maka torsi yang dihasilkan adalah dapat bernilai konstan. Motor BLDC dapat dioperasikan dengan kecepatan bernilai 150 % dari rating kecepatannya, namun torsi yang dihasilkan akan mulai menurun [10]. Terdapat dua zona dala kurva torsi/kecepatan motor BLDC yaitu intermittent torque zone dan continuous torque zone. Pada zona intermittent motor dapat menghasilkan torsi dengan nilai diatas rating torsi namun dalam jangka waktu yang cepat dan tidak kontinyu, Sedangkan pada zona continuous motor dapat dioperasikan dengan torsi sama dengan atau dibawah nilai ratingnya secara kontinyu dan terus menerus. Motor akan bekerja pada zona intermittent adalah pada saat keadaan starting. Pada saat ini motor akan berputar menuju kecepatan referensi dari keadaan diam dengan percepatan tertentu. Dengan demikian akan dibutuhkan torsi tambahan untuk mengkompensasi inersia dari beban dan rotor dari motor itu sendiri.
2.3 Pengaturan Kecepatan Motor BLDC
Motor BLDC menggunakan saklar elektrik untuk melakukan proses komutasi. Untuk motor BLDC 3 fasa, saklar elektrik tersusun dengan konfigurasi jembatan 3 fasa.
Gambar 2. 5 Konfigurasi Saklar Elektrik [2].
Motor BLDC 3 fasa memerlukan 3 hall sensor (Ha, Hb, dan Hc) untuk mendeksi posisi rotor [9]. Hall sensor mempunyai 2 tipe output yaitu 60˚dan 120˚, berdasarkan posis dari hall sensor [2]. Dengan menggabungkan 3 hall sensor tersebut, maka akan dapat ditentukan urutan komutasi dari motor dan akan didapatkan 8 keadaan dari 3 hall sensor mula dari 000 hingga 111. Namun karena batasan dari perangkat, kondisi 000 dan 111 tidak mungkin muncul [8]. Sehingga hanya terdapat 6 status dari kombinasi hall sensor. Butuh 6 langkah untuk menyelesaikan 1 siklus elektrik. Pada setiap langkah, satu terminal dialari arus dan satu terminal lainnya dilairi arus dengan arah berlawanan. Sementara terminal ketiga dibiarkan tidak dialiri arus. Pada setiap keadaan komutasi hanya 1 hall sensor yang berubah nilainya. Apabila diringkas menjadi tabel, berikut adalah tabel komutasi pada keadaan tiap langkah :
Tabel 2. 1 Keadaan Hall Sensor pada Proses Komutasi [2].
11 A B c A B V 0 1 1 open - + 0 0 1 + - open 1 0 1 + open - 1 0 0 open + - 1 1 0 - + open 0 1 0 - open +
Kemudia sinya hall tersebut nantinya akan menentukan IGBT/MOSFET mana yang akan mengalami konduksi pada proses komutasi. Apabila digambarkan maka skemas proses komutasi adalah :
Gambar 2. 6 Skema Proses Komutasi [2].
Pada gambar 2.6 menunjukan kumparan stator dari motor BLDC dengan fasa U, V, dan W adalah mengalami konduksi atau tidak konduksi (floated) adalah berdasarkan sinyal hall a, b, dan c. Pada contoh ini motor berputar dengan arah berlawanan jarum jam.
Besar tegangan pada kumparan stator dari motor BLDC akan mempengaruhi kecepatan motor BLDC, sehingga dengan mengatur tegangan pada kumparan stator sama dengan mengatur kecepatan motor. Variasi dari tegangan
12
stator dapat didapatkan dari pengaturan duty cycle dari sinyal PWM yang mencacah gating signal [1].
2.4 Metode Kontrol Tegangan dengan PWM
Sinyal PWM berperan sebagai pengatur MOSFET/IGBT pada inverter. Inverter dikontrol dengan dengan sinyal PWM yang mengatur proses komutasi dengan cara membuat 2 dari 3 fasa adalah dalam keadaan konduksi dan 1 dalam keadaan floating. Dengan demikian maka akan terbentuk rotasi fluks pada stator.
Gambar 2. 7 Metode Kontrol dengan PWM Konvensional [3].
Pada gambar 2.7 merupakan salah satu metode kontrol PWM konvensional yang disebut sebagai metode PWM 120˚. Metode ini menimbulkan switching losses yang kecil pada sisi inverter dengan konten harmonik besar sehingga menyebabkan losses yang besar pada sisi motor [3]. Frekuensi sinyal PWM yang mencacah gating signal harus lebih besar daripada frekuensi putaran motor. Secara umum, frekuensi sinyal PWM minimal 10 kali lebih besar dari frekuensi maksimum putaran motor[2].
2.5 Sistem Kontrol Kecepatan Motor BLDC
2.5.1 PID
Kontroler PID adalah jenis kontroler yang umum digunakan pada dunia industri dikarenakan sifatnya yang simpel, robust, dan memiliki keandalan tinggi. Fungsi transfer dari kontroller PID yang dinyatakan dalam domain s adalah [4]:
𝐾(𝑆) = 𝐾𝑝+ 𝐾𝑖
𝑆 + 𝐾𝑑𝑆 (2.3)
Dimana 𝐾𝑝, 𝐾𝑖, 𝐾𝑑 adalah proportional, integral, dan derivative gain. Kontroler
PID menghitung nilai deviasi error antara nilai referensi dan nilai aktual. Lalu keluaran dari kontroler PID adalah sinyal kontrol dengan kombinasi linear dari parameter proportional, integral, dan derivative gain yang mengatur suatu plant. Salah satu contoh metode untuk tuning parameter PID adalah trial and error. Pada umunya tuning parameter proportional dilakukan terlebih dahulu sementara parameter integral dan derivative adalah dibuat menjadi 0. Kemudian setelah itu
13
dilakukan tuning pada paramaeter integral dan terakhir adalah parameter derivative [10]. Efek yang ditimbulkan dari pengaturan 𝐾𝑝, 𝐾𝑖, 𝐾𝑑 pada sistem closed loop adalah nilai 𝐾𝑝 yang besar akan membuat mempercepat rise time dari respon sistem dan mengurangi steady state error. Kemudian pada pengaturan 𝐾𝑖, akan memperkecil nilai steady state error namun akan membuat respon menjadi buruk. Pada saat tuning parameter 𝐾𝑖 adalah dimulai dengan nilai yang kecil. Lalu parameter 𝐾𝑑 akan meningkatkan stabilitas dari sistem, mengurangi overshoot, dan membuat respon transient menjadi lebih baik. Kontroler PID merupakan penjumlahan dari keluaran kontroler P, Kontroler I, dan Kontroler D.
2.5.2 Fuzzy Logic Controler
FLC (Fuzzy Logic Controller) Adalah algoritma kontrol berdasarkan linguistik yang mewakili pengetahuan manusia untuk mengkontrol sistem tanpa harus mengetahui model matematika [11]. Fuzzy Logic Controller atau dapat disebut Fuzzy Inference System (FIS) terdiri dari 5 blok utama yaitu Rule Base, Database, Decision-Making Unit, Fuzzification Interface, dan Defuzzification Interface [7]. Pada Rule Base terdiri dari jumlah fuzzy if-then rules yang digunakan. Lalu pada blok database merupakan fungsi keanggotaan dari fuzzy sets yang digunakan pada fuzzy rules. Fungsi keanggotaan adalah representasi grafik dari besar nilai partisipasi tiap input. Ada beberapa jenis fungsi keanggotaan diantaranya adalah fungsi berbentuk lonceng dan gauss. Rule base dan database dapat disebut juga sebagai knowledge base. Pada decision making unit adalah blok dimana dilakukan operasi inferensi pada rules. Proses untuk merubah variabel numerik (crisp variables) menjadi variabel linguistik disebut sebagai fuzzifikasi. Kebalikan dari fuzzifikasi adalah defuzzifikasi. Langkah dari operasi inferensi pada fuzzy if-then rules yang dijalankan oleh Fuzzy Inference Systems (FIS) adalah sebagai berikut [7]:
1. Membandingkan variabel input dengan fungsi keanggotaan pada bagian premis untuk mendapatkan nilai derajat keanggotaan pada setiap label linguistik. Proses ini juga disebut sebgai fuzzification.
2. Menggabungkan (dengan operasi T-norm, umunya multipication atau min.) nilai derajat keanggotaan pada bagian premise untuk mendapatkan firing streghth atau bobot dari setiap rule.
3. Menetapkan bagian konsekuen dari tiap rule berdasarkan dari bobot. 4. Melakukan agregasi pada bagian konsekuen untuk mendapatkan nilai yang
14
2.6 Karakteristik Respon
Karakteristik respon yang dianalisis dalam penelitian ini diantaranya adalah :
Rise Time : Merupakan besaran waktu yang menyatakan lamanya respon sistem mencapai nilai dari 10 % hingga 90% respon steady state.
Time Constant : Merupakan besaran waktu yang menyatakan lamanya respon mencapai nilai 63.2 % dari respon steady state.
Error Steady State : Merupakan nilai error pada saat keadaan steady state. Besarnya adalah selisih antara nilai rata - rata keluaran sistem pada saat steady state dan nilai referensi dibagi dengan nilai referensi kemudian dinyatakan dalam persen.
15
BAB III
METODE PENELITIAN
Dalam mewujudkan gagasan penelitian unggulan perguraun tinggi ini, penelitian dibedakan menjadi 2 perangkat, yaitu
1. Perangkat-keras (hardware)
Perangkat keras yang digunanakan dalam penelitian ini adalah satu unit personal computer dengan spesifikasi RAM 4GB dan prosesor Intel Core 7.
2. Perangkat-lunak (software)
Perangkat lunak yang digunakan dalam penelitian ini meliputi:
a. Software simulink MATLAB untuk mensimulasikan kontrol kecepatan motor BLDC menggunakan metode Fuzzy Logic Controller. Di dalam model simulink yang telah didesain tersusun atas beberapa bagian diantaranya adalah Inverter dan Suplai DC, Motor BLDC, Decoder, PWM Generator dan Logika Pensaklaran. 3. Perangkat Komponen Elektronika
Komponen elektronika yang digunakan meliputi : a. Switching (MOSFET)
b. Resistor
c. Microcontroller d. Kapasitor
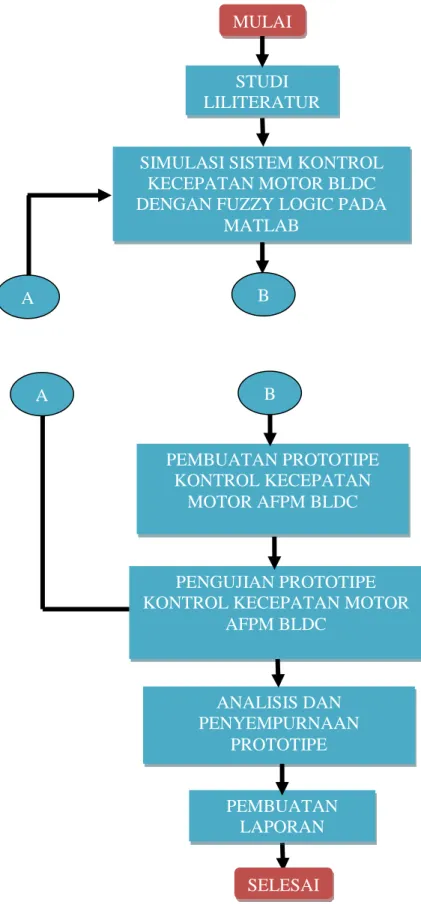
Berikut adalah langkah – langkah untuk membuat prototipe sampai pembuatan proposal:
16
Gambar 8. Flow Chart metode penelitian
PEMBUATAN PROTOTIPE KONTROL KECEPATAN
MOTOR AFPM BLDC
PENGUJIAN PROTOTIPE KONTROL KECEPATAN MOTOR
AFPM BLDC ANALISIS DAN PENYEMPURNAAN PROTOTIPE PEMBUATAN LAPORAN SELESAI B A MULAI I STUDI LILITERATUR
SIMULASI SISTEM KONTROL KECEPATAN MOTOR BLDC DENGAN FUZZY LOGIC PADA
MATLAB
B A
17
1. Studi Literatur
Pada tahap ini dilakukan studi literatur dengan mengumpulkan sumber, fakta, dan teori pendukung. Studi literatur berfokus pada desain kontrol kecepatan motor BLDC dengan metode Fuzzy Logic Controller.
2. Simulasi Desain Kontrol Kecepatan Motor BLDC dengan Metode Fuzzy
Logic Controller
Setelah melakukan studi literatur, tahap selanjutnya adalah perancangan sistem melalui simulasi untuk mendapatkan nilai teroptimal sebelum direalisasikan dalam bentuk prototipe. Perancangan model sistem kontrol kecepatan motor BLDC dilakukan menggunakan software simulink MATLAB. Di dalam model simulink yang telah didesain tersusun atas beberapa bagian diantaranya adalah Inverter dan Suplai DC, Motor BLDC, Decoder, PWM Generator dan Logika Pensaklaran.
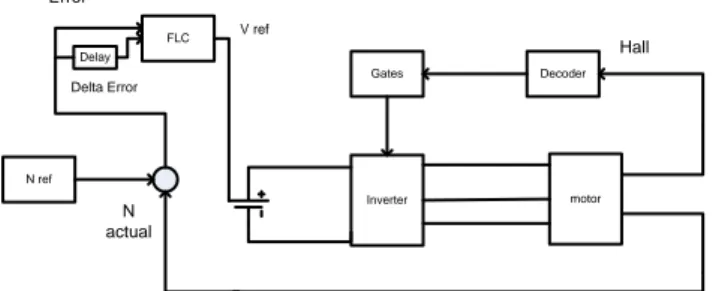
Inverter Hall motor Decoder Gates N ref N actual FLC Delay Error Delta Error V ref
Gambar 9. Diagram Keseluruhan Sistem Pengaturan Kecepatan motor BLDC dengan Fuzzy Logic Controller.
Posisi rotor dan kecepatan motor akan didapatkan dari hall sensor dan tachogenerator. Output kecepatan aktual motor akan dibandingkan dengan kecepatan referensi untuk menghasilkan error dan laju perubahan error. Laju perubahan error didapat dengan melakukan operasi diferensial pada sinyal error. Error dan laju perubahan error akan menjadi input dari kontroler Fuzzy Logic. Output dari kontroler adalah sinyal kontrol yang terhubung dengan PWM Generator. Sinyal kontrol tersebut mengatu besar duty cycle dari sinyal PWM yang dibangkitkan. Sinyal PWM akan dihubungkan secara AND dengan gating signal yang dihasilkan oleh logika pensaklaran. sehingga gating signal akan tercacah dan nilai tegangan dari stator akan dapat divariasi [1]. Sebelum gating signal masuk ke
18
inverter, terlebih dahulu akan dibandingkan dengan emf dan sinyal hall supaya menghasilkan skema sinyal PWM sesuai dengan yang diinginkan.
3. Pembuatan Prototipe Kontrol Kecepatan Motor AFPM BLDC dengan Metode Fuzzy Logic Controller
Setelah melakukan simulasi sistem melalui software, dilakukan realisasi pembuatan alat menggunakan beard board serta device elektronika lainnya. Pembuatan prototipe dimulai dengan merangkai rangkaian kontrol kecepatan, di mana kontrol kecepatan merupakan perpaduan dari solid state converter dan inverter. Setelah itu dilakukan desain kontrol logika Fuzzy Logic Controller dan kemudian diintegrasikan menjadi suatu prototipe desain kontrol kecepatan motor BLDC pada sepeda listrik.
4. Pengujian Prototipe
Dalam tahap ini dilakukan pengujian prototipe dengan membandingkan hasil pengujian dengan hasil ekspetasi melalui simulasi. Apabila hasil pengujian telah mencapai efisiensi dan nilai optimal yang diinginkan maka penelitian dapat lanjut ke tahap analisis dan proses penyempurnaan. Namun, apabila hasil yang didapatkan kurang optimal dilakukan looping atau pengecekan sistem pada simulasi.
5. Analisis dan Penyempurnaan Prototipe
Setelah dilakukan pengujian prototipe, dilakukan proses analisis dan penyempurnaan alat, dapat berupa penyempurnaan bagian elektronik, package, atau lainnya. Analisis yang didapatkan akan sangat berguna untuk menjadi bahan dalam pembuatan laporan
6. Pembuatan Laporan
Tahap terakhir adalah pembuatan laporan. Pada tahap ini, semua proses mulai dari studi literatur hingga analisis dimasukkan dalam laporan akhir secara lengkap.
19
BAB IV
ORGANISASI TIM, JADWAL DAN BIAYA PENELITIAN 4.1 Organisasi Tim
Penelitian ini diketuai Feby Agung Pamuji, ST., MT., Ph.D dengan anggota Dimas Anton Asfani, S.T, M.T, Ph.D, Dr. Dimas Fajar Uman Putra, S.T, M.T, Dedet Candra Riawan, ST., M.Eng., Ph.D.
Susunan organisasi tim peneliti dan pembagian tugasnya adalah:
No. Nama/NIDN/
Jabatan
Instans
i Asal Bidang Ilmu
Alokasi Waktu (jam/minggu) Uraian Tugas 1 Feby Agung Pamuji, ST., MT., Ph.D (0006028701/ Ketua Peneliti) ITS Teknik Elektro (Teknik Sistem Tenaga) 17 1. Merancang kontrol Fuzzy menggunakan MATLAB. 2. Menyusun Laporan Penelitian. 3. Menulis makalah hasil penelitian untuk disubmit ke Jurnal Internasional. 4. Mengorganisasi jalannya penelitian. 2 Dr. Dimas Fajar Uman Putra, S.T, M.T ITS Teknik Elektro (Teknik Sistem Tenaga) 13,5 1. Membuat prototype kontrol kecepatan BLDC. 2. Membantu menyusun Laporan Penelitian. Membantu menulis makalah hasil penelitian untuk disubmit ke Jurnal Internasional.
20 3 Dimas Anton Asfani, S.T, M.T, Ph.D (0005098101/ Anggota Peneliti) ITS Teknik Elektro (Teknik Sistem Tenaga) 13,5 1. Membuat prototype kontrol kecepatan BLDC. 2. Membantu menyusun Laporan Penelitian. Membantu menulis makalah hasil penelitian untuk disubmit ke Jurnal Internasional. 4 Dedet Candra Riawan, ST., M.Eng., Ph.D. ITS Teknik Elektro (Teknik Sistem Tenaga) 13,5 3. Membuat prototype kontrol kecepatan BLDC. 4. Membantu menyusun Laporan Penelitian. Membantu menulis makalah hasil penelitian untuk disubmit ke Jurnal Internasional.
21
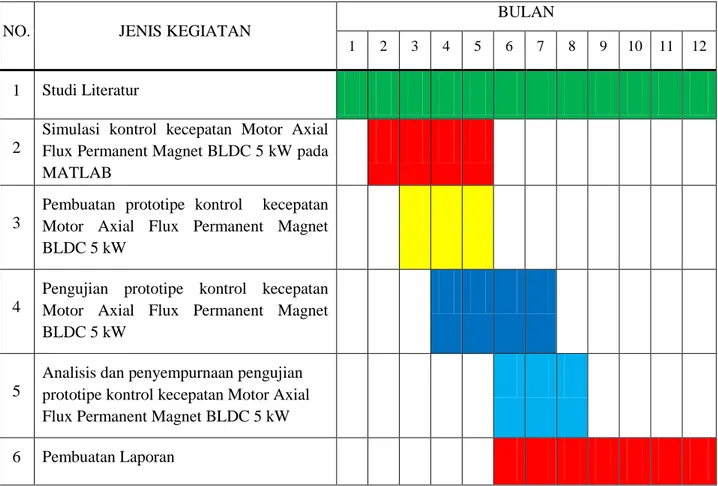
4.2 Jadwal Penelitian
Tabel 2. Jadwal pelaksanaan penelitian
NO. JENIS KEGIATAN
BULAN
1 2 3 4 5 6 7 8 9 10 11 12
1 Studi Literatur
2
Simulasi kontrol kecepatan Motor Axial Flux Permanent Magnet BLDC 5 kW pada MATLAB
3
Pembuatan prototipe kontrol kecepatan Motor Axial Flux Permanent Magnet BLDC 5 kW
4
Pengujian prototipe kontrol kecepatan Motor Axial Flux Permanent Magnet BLDC 5 kW
5
Analisis dan penyempurnaan pengujian prototipe kontrol kecepatan Motor Axial Flux Permanent Magnet BLDC 5 kW
22
4.3 Anggaran Biaya
Biaya yang diperlukan dalam penelitian ini pada tahun 1 adalah sebagai berikut :
Tabel 3. Anggaran Biaya Penelitian tahun 1.
4.4. Roadmap Penelitian di Laboratorium Konversi Energi Listrik
23
DAFTAR PUSTAKA
[1] J. N. Ansari dan S. L, "Speed Control of BLDC Motor for Electric Vehicle," International Journal of Engineering Research &Technology (IJERT), vol. 3, pp. 1666 - 1671, 2014.
[2] J. Zhao dan Y. Yu. 2011, Brushless DC Motor Fundamentals.
[3] L. Yen-Shin, S. Fu-San, dan C. Yung-Hsin, "Novel Loss Reduction Pulsewidth Modulation Technique for Bushless DC Motor Drives Fed by MOSFET Inverter," IEEE Transactions on Power Electronics, vol. 19, pp. 1646-1652, 2004.
[4] M. A. Shamseldin dan A. A. E.-. Samahy, "Speed Control of BLDC Motor by Using PID Control and Self-Tuning Fuzzy PID Controller," in 15th International Workshop on Research and Education in Mechatronics (REM), 2014, pp. 1-9.
[5] R. Arulmozhiyal dan R. Kandiban, "Design of Fuzzy PID Controller for Brushless DC Motor," in 2012 International Conference on Computer Communication and Informatics, 2012, pp. 1-7.
[6] K. Premkumar dan B. V. Manikandan, "Adaptive Neuro-Fuzzy Inference System based Speed Controller for Brushless DC Motor," ELSEVIER Neurocomputing, vol. 138, pp. 260-270, 2014.
[7] J. S. R. Jang, "ANFIS: Adaptive-Network-Based Fuzzy Inference System," IEEE Transactions on Systems, Man, and Cybernetics, vol. 23, pp. 665-685, 1993.
[8] X. Gao. 2013, BLDC Motor Control with Hall Sensors Based on FRDM-KE02Z Applicarion Note.
[9] C.-L. Xia, Permanent Magnet Brushless DC Motor Drives and Controls: John Wiley & Sons Singapore Pte. Ltd., 2012.
[10] P. Yedamale dan M. T. Inc. 2003, Brushless DC (BLDC) Motor Fundementals. 20.
[11] H. Mohan, R. K. P, dan G. S, "Speed Control of Brushless DC Motor Using Fuzzy Based Controllers," IRJET, vol. 2, pp. 875-881, 2015.
[12] Hartono, "Optimization of Tsukamoto Fuzzy Inference System using Fuzzy Grid Partition," International Journal of Computer Science and Network, vol. 5, p. 6, 5 October 2016.
24
Lampiran
BIODATA KETUA
A. IDENTITAS DIRI
1 Nama Lengkap (dengan gelar) Feby Agung Pamuji ST., MT. Ph.D (L)
2 Jabatan Fungsional Asisten Ahli
3 Jabatan Struktural -
4 NIP 198702062012121002
5 NIDN 0006028701
6 Tempat dan Tanggal Lahir Tulungagung, 6 Februari 1987
7 Alamat Rumah Puri Tambak Rejo B2, Waru, Sidoarjo
8 Nomor HP 081335221316
9 Alamat Kantor Jurusan Teknik Elektro Fakultas Teknologi Industri
Institut Teknologi Sepuluh Nopember Kampus Sukolilo ITS Surabaya 60111
10 Nomor Telepon/Faks (031) 594 7302, 593 5525/(031) 593 1237
11 Alamat e-mail
12 Lulusan yang Telah Dihasilkan S-1 = 10 orang
13 Mata Kuliah yang Diampu
Konversi Tenaga Listrik (3 sks) Teknik Tenaga Listrik (2 sks) Elektronika Daya (3 sks)
B. RIWAYAT PENDIDIKAN
Program : S1 S2 S3
Nama PT Institut Teknologi
Sepuluh Nopember
Institut Teknologi Sepuluh Nopember
Kumamoto University
Bidang Ilmu Teknik Elektro Teknik Elektro Computer Science and
Electrical Engineering
Tahun Masuk-Lulus 2005 -2009 2010 - 2012 2015 - 2018
Judul
Skripsi/Thesis/Disertasi
Studi sambaran petir dengan metode bola bergulir
Desain hybrid selsurya dengan turbin angin
Maksimum Power Point tracking pada hybrid PV/WTG system dengan memperhatikan
kenaikan tegangan sistem grid
25
Nama Pembimbing Ir. Syarifuddin M, M.Eng.
IGN. Satriyadi ST., MT.
Prof Mochammad Ashari Dr. Heri Suryoatmojo
Prof. Hajime Miyauchi
PENGALAMAN PENELITIAN
Tahun Topik/Judul Penelitian Sumber Dana
2013 Anggota peneliti, “Desain Control Hybrid system Photovoltaic,
Wind Turbine and Diesel” Penelitian JICA predict 2 th. 2013, Surabaya, INDONESIA.
LPPM ITS
2015
Ketua Peneliti, Desain Kontrol Multi – Input DC – DC Converter Sistem Hibrid Turbin Angin dan Sel Surya Menggunakan Kontrol
Fuzzy Logic untuk Tegangan Rendah LPPM ITS
2019
Ketua Peneliti, Prediksi Duty Cycle dari Maximum Power Point Tracking berdasarkan pada Metode Artificial Neural Network dan
Bootstrap untuk Hybrid Photovoltaic/ Turbin Angin dengan
Mempertimbangkan Pembatasan Tegangan Pada Grid LPPM ITS
PELATIHAN PROFESIONAL
Tahun Jenis Pelatihan Penyelenggara Jangka waktu
2012 Pelatihan Audit Energi BPPT 1 week
2013 P3AI (pelatihan dosen muda) ITS 1 minggu
KARYA ILMIAH A. Buku/Bab Buku/Jurnal
1. Soedibyo, Feby Agung Pamuji and Mochamad Ashari, Grid Quality Hybrid Power System Control of Microhydro, Wind Turbine and Fuel Cell Using Fuzzy Logic, International Review on Modelling and Simulations (I.RE.MO.S), Vol 6, No 4, Agust 2013, pp 1271-1278, Indexed in Scopus, ISSN 1974-9821.
2. Feby Agung Pamuji, Hajime Miyauchi, Maximum Power Point Tracking of Multi-input Inverter for connected Hybrid PV/Wind Power System Considering Voltage Limitation in Grid, International Review on Modelling
26
and Simulations (I.REMOS), Journal, Vol.11, No.3,Published in the Journal issued on 30/June /2018.
B. Seminar Internasional
1. Feby Agung Pamuji, Hajime Miyauchi , A New Control Design of Maximum Power Point Tracking for Wind Turbine Connected to Low Voltage Grid,International Seminar on Intelligent Technology and Its Application(ISITIA) 2016, Indonesia.
2. Feby Agung Pamuji, Hajime Miyauchi ,Control Design of Solar Cell for Maximum Power Point Tracking Using Fuzzy Logic Controller to supply 380 V Grid, Institute of Electrical Engineering, Japan, National Conference 2016, Tohoku University, Sendai, Japan.
3. Feby Agung Pamuji, Hajime Miyauchi, Control Design of Hybrid Photovoltaic/Fuel Cell for Maximum Power Point Tracking Using Multi Input DC/DC converter Based on Artificial Neural Network, Institute of Electrical Engineering, Japan, National Conference 2017, Meiji University, Tokyo, Japan.
1. Anggota I
1. Biodata
Nama : Dimas Anton Asfani, S.T, M.T, Ph.D
NIDN : 0005098101
Unit Kerja : Institut Teknologi Sepuluh Nopember
Program Studi : Teknik Elektro
Jabatan Akademik : Lektor
Jenjang Pendidikan : S-3
Tertinggi
H-Index Scopus : 5
Gelar Akademik Depan : -
Gelar Akademik Belakang : S.T, M.T, Ph.D
No. KTP : 20060005098101
Alamat : JL Bulak Cumpat Barat 2/32 Surabaya
No. Handphone : 081231469020
Email : [email protected]
Web Personal :
27
Bidang Keahlian : Teknik Sistem Tenaga Listrik, Diagnosa Mesin
Listrik 2. Riwayat Penelitian No. Tahun Jabatan Judul Skema Sumber Dana 1. 2013 Ketua Pengusul
Perencanaan Modul Virtual Laboratory untuk Percobaan Jarak Jauh Pengoperasian dan Diagnosis Mesin Listrik
Ipteks DIKTI 2. 2013-2014 Anggota Pengusul
Analisa Dan Pemodelan Kegagalan Isolasi Pada Mesin Listrik : Eksperimen Dan Analisa Pengaruh Kelembaban Dan Kontaminan Pada Kegagalan Isolasi Mesin Listrik
PTUPT DIKTI 3. 2014-2016 Ketua Pengusul
Analisa Kegagalan dan Desain Sistem Monitoring Isolasi Mesin Listrik PTUPT DIKTI 4. 2015 Anggota Pengusul
Rancang Bangun Hybrid Power Generation Untuk Charging Station Mobil Sebagai Pengembangan Energi Terbarukan Masa Depan
PTUPT DIKTI
5. 2015-2016
Anggota Pengusul
Pengaruh Jenis Material dan Cara Potong Inti Besi Transformator terhadap Arus Inrush Transformator
PTUPT DIKTI
6. 2015-2017 Ketua
Pengusul
Analisa Karakteristik Dan Deteksi Bunga
Api Listrik Pada Instalasi Tegangan Rendah
Berbasis Mikrokontroller Dengan Haar Wavelet
PTUPT DIKTI
7. 2017-2019
Anggota Pengusul
Analisis Ketahanan Trafo Pengukuran Tegangan di Gardu Induk Tegangan Tinggi terhadap Tegangan Lebih Transien Feroresonansi
PTUPT DIKTI
8. 2018-2019 Ketua
Pengusul
Rancang Bangun Peralatan Deteksi Bencana Kebakaran Akibat Hubung Singkat PTUPT Dikti Listrik Secara Online Berbasis Smart Phone
PTUPT DIKTI
28
9. 2018-2019
Ketua Pengusul
Rancang Bangun Peralatan Online Monitoring dan Offline Diagnostic untuk Skuter Listrik Berbasis Tegangan Impuls dan Spektrum Arus PTUPT DIKTI 10. 2019 Anggota Pengusul
Deteksi Partial Discharge pada Isolasi Peralatan Tegangan Tinggi berbasis Teknik Ultra High Frequency (UHF)
PTUPT DIKTI 3. Riwayat Pengabdian 4. Riwayat Publikasi No. Tahun/Jenis Publikasi/Status
Nama Judul dan Jurnal Quartile
1. Tahun Publikasi : 2018 Status Penulis : Jenis Publikasi : Jurnal Internasional
Judul Artikel : Investigation of Transformer Oil Characteristics by The Effect of Rapid Temperature Fluctuation
Nama Jurnal : International Journal on Energy Conversion (I.R.E.CON.), Vol. 6, No. 5, pp. 160-167, September 2018 Penulis : Daniar Fahmi, I Made Yulistya Negara, Dimas Anton Asfani, I Gusti Ngurah Satriyadi, M. Wahyudi, Novia Andriani Terindex Scopus 2. Tahun Publikasi : 2018 Status Penulis : Jenis Publikasi : Jurnal Internasional
Judul Artikel : The Modelling of Low Voltage Arc Flash Based on Artificial Neural Network
Nama Jurnal : International Journal of Innovative Computing Information and Control (IJICIC), Vol. 14, No. 4, pp. 1389-1405, August 2018
Penulis: D.A. Asfani, A.F. Ilman, NWA Sanjaya, IMY Negara, Daniar Fahmi, DR Sawitri, M Wahyudi, HL Al-Azmi
Q1 3. Tahun Publikasi : 2018 Status Penulis : Jenis Publikasi : Jurnal Internasional
Judul Artikel : Impact of Winding Configuration of Three Phases Power Distribution Transformer on
Ferroresonance
Nama Jurnal : International Journal on Energy Conversion (I.R.E.CON.), Vol. 6, No. 1, pp. 0-16, May 2018
Penulis: I Gusti Ngurah Satriyadi, I Made Yulistya Negara, Adi Soeprijanto, Dimas
Terindex Scopus
29
Anton Asfani, Daniar Fahmi, Mochammad Wahyudi, Dio Randa Damara 4. Tahun Publikasi : 2017 Status Penulis : Jenis Publikasi : Jurnal Internasional
Judul Artikel : Effect of void shape in polymeric insulator on the electric field distribution
Nama Jurnal : International Journal on Energy Conversion (I.R.E.CON.), Vol. 5, No. 3, pp. 96-99, May 2017
Penulis: I Made Yulistya Negara, D.A.
Asfani, Daniar Fahmi, Yusrizal Afif
Terindex Scopus 5. Tahun Publikasi : 2016 Status Penulis : Jenis Publikasi : Jurnal Internasional
Judul Artikel : Ferroresonance characteristics on capacitive voltage transformer under lightning impulse voltage
Nama Jurnal : International Review on Modelling and Simulations, Vol.9, No.4, August, 2016
Penulis: I Gusti Ngurah Satriyadi, I Made Yulistya Negara, Daniar Fahmi, N Wijayanto, M. Wahyudi, Dimas A.
Asfani, Adi S Q2 6. Tahun Publikasi : 2016 Status Penulis : Jenis Publikasi : Jurnal Internasional
Judul Artikel : Effect of biological pollutant on outdoor polymer insulator under acceleration environment condition
Nama Jurnal : International Review of Electrical Engineering, Vol. 11, No. 4, September 2016
Penulis: I Made Yulistya Negara, Dimas
Anton Asfani, Daniar Fahmi, Teguh Aryo
Nugroho Q1 7. Tahun Publikasi : 2016 Status Penulis : Jenis Publikasi : Jurnal Internasional
Judul artikel : Effect of Core Cutting Topology and Material of Three Phase Transformer on Magnetization Curve and Inrush Current: Experimental Approach
Nama Jurnal : ASEAN Engineering Journal (AEJ), Vol. 6, No. 2, July – December 2016
Penulis : I Made Yulistya Negara, Daniar Fahmi, Dimas A. Asfani, Rahman Cahyadiputra
30 8. Tahun Publikasi : 2015 Status Penulis : Jenis Publikasi : Jurnal Internasional
Judul artikel : Design of High Ratio DC-DC Converter Applied to PV-Grid Connected Electric Vehicle Charging Station
Nama Jurnal : International Journal on Electrical Engineering and Informatics, Vol. 7, No. 3, pp. 489, September 2015, Indonesia
Penulis : Dimas Anton Asfani, Daniar Fahmi, Edi Wibowo, Heri Suryoatmojo, Dedet C Riawan Q3 9. Tahun Publikasi : 2015 Status Penulis : Jenis Publikasi : Jurnal Internasional
Judul artikel : Material and Cutting Method Effects of Three Phase Transformer-Core on Magnetization Curve and Inrush Current: Simulation Approach
Nama Jurnal : International Review on Modeling and Simulations (IREMOS), Vol.8, No.3, June, 2015.
Penulis : IMY Negara, Dimas A Asfani, D Fahmi, S Baskoro Q2 10. Tahun Publikasi : 2015 Status Penulis : Jenis Publikasi : Jurnal Internasional
Judul Artikel : Performance Analysis of Hybrid Electric Vehicle with Electric Double Layer Capacitor under Short Circuit Fault
Nama Jurnal : International Journal of Innovative Computing, Information and Control (IJICIC), ISSN 1349-4198, Vol.11, Issue 1, Feb 2015
Penulis : Ibrahim Sefik and Dimas Anton
Asfani Q1 11. Tahun Publikasi : 2014 Status Penulis : Jenis Publikasi : Jurnal Internasional
Judul Artikel : Neural Network Based Real Time Detection of Temporary Short Circuit Fault on Induction Motor
Winding through Wavelet Transformation
Nama Jurnal : International Journal of Innovative Computing, Information and Control (IJICIC), ISSN 1349-4198, Vol.10, Issue 6, Dec 2014.
Penulis : D. A. Asfani, Syafaruddin, Mauridhi H. Purnomo, T.Hiyama
Q1 12. Tahun Publikasi : 2013 Status Penulis : Jenis Publikasi : Jurnal
Judul Artikel : Fuzzy logic controller based maximum power point Tracking for Total Cross Tied Photovoltaic Under Partial Shading
31
Internasional Nama Jurnal : Price worthy International Review of Automatic Control (IREACO),vol 6 No.3. May 2013. Penulis : Donny Radianto, Dimas Anton
Asfani, Syaffaruddin, Takashi Hiyama
13. Tahun Publikasi : 2012 Status Penulis : Jenis Publikasi : Jurnal Internasional
Judul Artikel : Temporary short circuit detection in induction motor winding using combination of wavelet transform and neural network
Nama Jurnal : Elsevier Internatinal Journal Expert Systems with
Applications, Volume 39, Issue 5, April 2012, Pages 5367–5375, 2012
Penulis : Dimas Anton Asfani, Abdul Kadir bin Muhammad, Syafaruddin, Mauridhi Heri Purnomo, Takashi Hiyama Q1 14. Tahun Publikasi : 2011 Status Penulis : Jenis Publikasi : Jurnal Internasional
Judul Artikel : Temporary Short Circuit Detection in Induction Motor Winding Using Second Level Haar-Wavelet Transform
Nama Jurnal : IEEJ Transactions on Industry Applications, Volume 131, Issue 9, pp. 1093-1102, 2011 Penulis : Dimas Anton Asfani;
Syafaruddin, Mauridhi Heri Purnomo, Takashi Hiyama
Q3
2. Anggota II
Dedet Candra Riawan, ST., M.Eng., PhD.
Electrical Engineering Departement Institut Teknologi Sepuluh NopemberSukolilo-Surabaya, Indonesia 60111. Phone: +62 31 5947302, Fax.+62 31 5931237
32 EDUCATION
August 2011, Doctor of Philosophy, Department of Electrical & Computer Engineering, Curtin University of Technology, Australia.
December 2006, Master of Engineering, Department of Electrical & Computer Engineering, Curtin University of Technology, Australia.
February 1999, Bachelor of Engineerin in Electrical Engineering, Institut Teknologi Sepuluh Nopember (ITS) Surabaya, Indonesia.
ACADEMIC TEACHING & EXPERIENCE
Joined Electrical Engineering Department (EED), Institut Teknologi Sepuluh Nopember (ITS) since 2003.
Postgraduate Program Coordinator in EED-ITS 2014-2017 Undergraduate Progam Coordinator in EED-ITS 2017-Now
PUBLICATION (2015-2018)
1. Antonius Rajagukguk, Dedet Candra Riawan, Mochamad Ashari ,
“Performance Characteristics of Miniature Photovoltaic Farm Under Dynamic Partial Shading”, Indonesian Journal of Electrical Engineering and Computer Science, Vol. 11, No. 1, 2018.
2. Dedet C Riawan, Sjamsjul Anam, Heri Suryoatmojo ,“Output Filter
Sizing of Grid Connected Buck-Boost Inverter Using Graphical Approach”, ASEAN Engineering Journal Part A, Vol 7 No 1, 2017.
3. Dimas Anton Asfani, Dedet Candra Riawan, I Made Yulistya Negara,
Daniar Fahmi, Muhammad Farid Anshori, Mochammad Wahyudi,
“Evaluation of Rotor Position Effect on Stator Diagnostic Based on Surge Voltage Test”, International Seminar on Application for Technology of Information and Communication (iSemantic), 2017.
33
4. Mohamad Ridwan, Dedet Candra Riawan, Heri Suryoatmojo, “Particle
Swarm Optimization-Based BLDC Motor Speed Controller With Response Speed Consideration”, International Seminar on Intelligent Technology and Its Applications (ISITIA), 2017.
5. H Suryoatmojo, NR Arsya, R Mardiyanto, DC Riawan, S Anam M
Ashari, “Design of electronic speed controller for BLDC motor based on single ended primary inductance converter (SEPIC)”, International Seminar on Intelligent Technology and Its Applications (ISITIA), 2017.
6. Antonious Rajagukguk, Ciptian Weried Priananda, Dedet Candra
Riawan, Mochamad Ashari, “Novel derivative cluster area methods (DCAM) for power optimization of PV farm under dinamically shading effect”, 15th International Conference on Quality in Research (QiR): International Symposium on Electrical and Computer Engineering, 2017.
7. Ciptian Weried Priananda, Antonious Rajagukguk, Dedet Candra
Riawan, Mochamad Ashari, “New approach of maximum power point tracking for static miniature photovoltaic farm under partially shaded condition based on new cluster topology”, 15th
International Conference on Quality in Research (QiR):
International Symposium on Electrical and Computer Engineering, 2017.
8. I Made Yulistya Negara, Dicky Wahyu Darmawan, Ryan Nurdianto,
Dedet Candra Riawan, Arif Musthofa, Dimas Anton Asfani, Mochammad Wahyudi, Daniar Fahmi, “Demagnetization Method for Reducing Inrush Current of Single Phase 1 kVA Transformer”, Journal on Advanced Research in Electrical Engineering, Vol. 1, No. 1, 2017.
9. Ainur Rachmad Hidayat, Dedet Candra Riawan, Mochamad Ashari,
“Back to Back Voltage Source Inverter for Control of Self Excited Induction Generator”, Jurnal Teknik ITS, Vol. 5, No.2, 2016.
34
10. Riny Sulistyowati, Dedet Candra Riawan, Mochamad Ashari, “PV
farm placement and sizing using GA for area development plan of distribution network”, International Seminar on Intelligent Technology and Its Applications (ISITIA), 2016.
11. Antonius Rajagukguk, Dedet Candra Riawan, Mochamad Ashari,
“Optimization of photovoltaic farm under partial shading effects using artificial intelligent based matrix switch controller”, 2nd International Conference on Information Technology, Computer, and Electrical Engineering (ICITACEE), 2015.
12. Dedet C Riawan, Heri Suryatmojo, Nita I Pertiwi, “Capacitor
Sizing of Self-Excited Three-Phase Induction Generator for Single-Phase Operation using Particle Swarm Optimization”, 8th AUN/SEED-Net Regional Conference on Electrical and Electronics Engineering, 2015.
![Gambar 2. 1 Skema Rotasi Rotor [2].](https://thumb-ap.123doks.com/thumbv2/123dok/4232186.3117915/6.892.181.731.562.720/gambar-skema-rotasi-rotor.webp)
![Gambar 2. 3 Rangkaian Ekivalen Motor BLDC 3 Fasa [9] .](https://thumb-ap.123doks.com/thumbv2/123dok/4232186.3117915/8.892.173.708.123.1057/gambar-rangkaian-ekivalen-motor-bldc-fasa.webp)
![Gambar 2. 4 Kurva Karakteristik Torsi/Kecepatan motor BLDC [10].](https://thumb-ap.123doks.com/thumbv2/123dok/4232186.3117915/9.892.173.684.217.995/gambar-kurva-karakteristik-torsi-kecepatan-motor-bldc.webp)
![Gambar 2. 5 Konfigurasi Saklar Elektrik [2].](https://thumb-ap.123doks.com/thumbv2/123dok/4232186.3117915/10.892.263.689.560.762/gambar-konfigurasi-saklar-elektrik.webp)
![Gambar 2. 6 Skema Proses Komutasi [2].](https://thumb-ap.123doks.com/thumbv2/123dok/4232186.3117915/11.892.273.664.125.365/gambar-skema-proses-komutasi.webp)
![Gambar 2. 7 Metode Kontrol dengan PWM Konvensional [3].](https://thumb-ap.123doks.com/thumbv2/123dok/4232186.3117915/12.892.319.618.309.577/gambar-metode-kontrol-dengan-pwm-konvensional.webp)