28
BAB III
METODOLOGI PENELITIAN
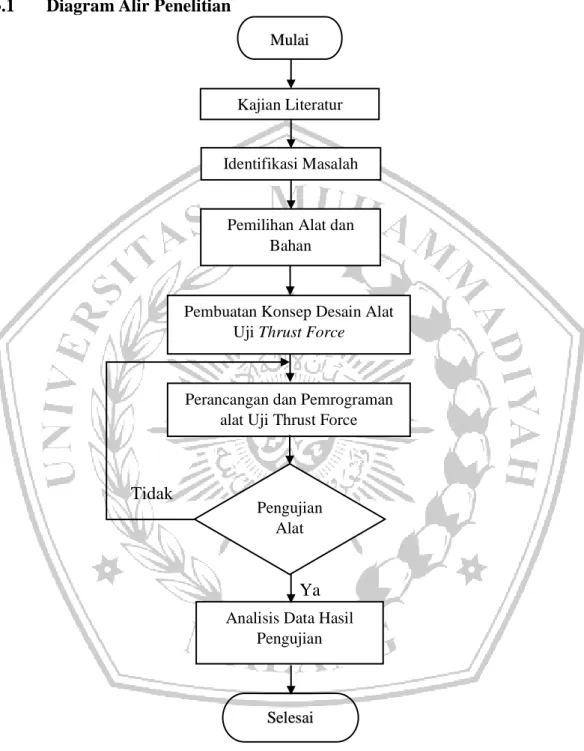
3.1 Diagram Alir PenelitianGambar 3. 1 Diagram Alir Penelitian
Penelitian yang dilakukan pada tugas akhir ini menggunakan True experimental research (Metode Eksperimental Sesungguhnya) yang mana dilakukan pengujian dengan menentukan perancangan pengembangan alat uji thrust
Mulai
Kajian Literatur
Identifikasi Masalah
Pemilihan Alat dan Bahan
Perancangan dan Pemrograman alat Uji Thrust Force
Pengujian Alat
Analisis Data Hasil Pengujian
Selesai
Pembuatan Konsep Desain Alat Uji Thrust Force
Tidak
force digital untuk UAV berbasis arduino uno sebagai mikrokontroler. Setelah dilakukan pengujian terdapat 2 alur perintah yaitu alur “Ya” dan “Tidak”. Alur “Ya” bila di dalam pengujian telah mendapatkan hasil pengujian yang diinginkan yaitu hasil tidak jauh beda dengan nilai pembanding. Alur “Tidak” apabila hasil pengujian terdapat masalah di dalam pengujian yaitu nilai dan program coding tidak sesuai.
3.1.1 Daftar Persyaratan Desain Alat Uji
Agar dapat dikembangkan lebih lanjut, maka dibuatlah daftar persyaratan desain untuk menjelaskan spesifikasi dan memudahkan pengembangan dari alat uji. Adapaun tabel 3.1 sebagai Daftar Persyaratan sebagai berikut :
Tabel 3. 1 Daftar Persyaratan Desain Alat Uji
Sifat
Daftar Persyaratan Tanggal : Pengembangan Alat Uji Thrust Force Digital
Untuk Multicopter Berbasis Mikrokontroler
Halaman : 1
W/S Persyaratan
A. Geometri
W Digunakan untuk Uji Thrust Force Multicopter
B. Energi
S
W W
S
Menggunakan power supply untuk energi Electric Speed Control (ESC)
Menggunakan energi mekanik (force)
Menggunakan load cell sensor sebagai pengukur gaya dorong (thrust force).
Menggunakan sensor ACS712 sebagai pengukur aliran arus DC Menggunakan arduino uno sebagai Mikrokontroler
C. Kinematik S
W
Menggunakan IR proximity sensor untuk mengetahui kecepatan RPM.
Menggunakan load cell sensor sebagai pengukur gaya dorong.
Teknik
Daftar Persyaratan Tanggal : Pengembangan Alat Uji Thrust Force Digital
Untuk Multicopter Berbasis Mikrokontroler
Halaman : 2
W/S Persyaratan
A. Pemrograman
S Menggunakan software arduino IDE untuk membuat sketch coding alat.
B. Material
S Konstruksi pada rangka alat uji thrust force dari bahan material Alumunium dan PLA.
C. Diplay
W Data ditampilkan pada layar LCD 20x4 character.
D. Ergonomis
W
W
Mudah untuk dioperasikan.
Mempunyai bobot yang ringan hingga mudah untuk dibawa (flexsibel).
Pada tabel diatas mempunyai salah satu syarat berupa wajib dipenuhi (W) dan saran untuk dipenuhi (S). Dengan keterangan pada tabel 3.1 maka dapat memudahkan customer untuk merancang suatu alat. (Riadi, Muhammad Sugeng, 2009).
3.1.2 Identifikasi Masalah
Penulis memiliki tujuan untuk mengerucutkan permasalahan yang mempunyai pesyaratan desain. Dengan menajamkan/mengerucutkan akar masalah dari desain persyaratan maka dilakukan tahap identifikasi. Dengan melakukan tahapan pengambilan data secara kuantitatif dan kualitatif penulis mengharapkan dapat memperoleh data yang sesuai. Tahapan – tahapan yang dilakukan sebagai berikut:
1. Data kuantitatif, dengan penelitian secara kuantitatif penulis mengharapkan dapat menemukan hasil dari kriteria daftar persyaratan yang dapat dilihat langsung dari tabel 3.1. Hasil dari kriteria tersebut sebagai berikut :
a. single point load cell sensor Alat Uji thrust force digital untuk multicopter berbasis mikrokontroler arduino uno menggunakan load cell, IR proximity sensor, ACS712 30A, Voltage Sensor b. Membaca nilai perubahan thrust force / gaya dorong secara real
time.
c. Membaca besaran RPM dari BLDC motor dan propeller secara real time.
d. Membaca nilai besaran arus secara real time. e. Membaca nilai besaran tegangan secara real time. f. Menggunakan IR proximity sensor Sebagai tachometer.
g. Menggunakan driver modul HX 711 sebagai penguat sinyal. h. Menggunakan power supply AC to DC 12v 30A.
i. Menggunakan 2 variasi propeller yaitu 2 blades (1045) dan 4 blades (5040).
j. Menggunakan LCD 20x4 character k. Instalasi Pemasangan mudah. l. Biaya produksi yang murah.
m. Dapat memperoleh data secara realtime. n. Mudah dalam pengoperasian alat.
2. Data kualitatif, Mengubah data kuantitatif dan menyatakannya dalam kalimat yang sederhana yang mewakili. Dari kriteria tersebut didapatkan hasil sebagai berikut:
a. Alat uji thrust force multicopter menggunakan load cell & IR proximity sensor.
b. Menggunakan 2 variasi BLDC Motor.
c. Untuk membaca perubahan gaya dorong dan RPM. d. Nilai Resistansi sensor tergantung pada objek material. e. Mikrokontroler sebagai konverter sinyal analog to digital.
f. Menggunakan software arduino IDE untuk memprogram dan menampilkan Serial monitor data.
g. Menggunakan LCD 20x4 untuk tampilan data. h. Dapat memperoleh data secara realtime.
i. Data yang dihasilkan berbentuk nilai angka untuk tujuan pengarsipan.
j. Instalasi pemasangan yang mudah dan biaya produksi yang terjangkau.
3. Kemudian menggeneralisir data kuantitatif. Dari kriteria tersebut didapatkan hasil sebagai berikut:
a. Pengembangan Alat uji thrust force Digital untuk multicopter Berbasis Mikrokontroler.
b. Membaca perubahan gaya dorong, RPM, Arus, Daya, dan Tegangan secara real time.
c. Mikrokontroler sebagai pengolah sinyal input/output.
d. Menggunakan serial port arduino uno dan LCD 20x4 untuk tampilan.
e. Bentuk nilai angka untuk tujuan pengarsipan (Laksono 2019).
3.1.3 Kombinasi dan Susunan Konsep
Dengan Mentabelkan Sub-fungsi dari diagram blok sub-fungsi maka akan memudahkan untuk pemilihan alat yang dapat untuk digunakan. Jika ditabelkan sub-fungsi terlihat pada tabel 3.2 sebagai berikut.
Tabel 3. 2 kombinasi sub-fungsi yang didasarkan pada diagram blok sub-fungsi
No Prinsip Solusi/Sub
Fungsi 1 2 3
1 Energi Mekanik
3 Arduino IDE Sketch 4 Pengukur Daya Dorong Single Point Load Cell S-Beam Load Cell 5 Penguat Instrumental IC L293B Module HX711 6 Pengukur Kecepatan Hall Effect
Sensor A3144 IR Proximity LM393
7 Perangkat
Setelah melihat tabel diatas maka akan terlihat berbagai macam kemungkinan kombinasi sub – fungsi yang mungkin dapat digunakan.
3.1.4 Analisis Biaya
Dengan menampilkan pengeluaran biaya yang digunakan untuk mengembangkan alat dapat menjadi tolak ukur untuk melakukan pengembangan lebih lanjut apabila penelitian ini dilakukan penyempurnaan alat uji.
No Komponen Harga
(Satuan) Jumlah Total Ket
1. 1 Set Frame Alat Uji - 1 -
Diambil dari Penelitian sebelumnya 2. Power Supply 12V 30A 275.000 1 275.000 3. BLDC 1000 Kv + ESC 30A + Propeller 1045 200.000 1 200.000 4. Turnigy 2300 Kv - 1 - Diambil dari Penelitian sebelumnya 5. Propeller 5040 4 Blades - 1 - Diambil dari Penelitian sebelumnya 6. ACS712 30A 35.000 1 35.000 7. Voltage Sensor 10.000 1 10.000 8. IR Proximity 15.000 1 15.000 9. LCD 20x4 H 55.000 1 55.000 10. I2C 15.000 1 15.000
11. Box Hitam 14.000 1 14.000 12. HX711 Driver Load Cell 15.000 1 15.000 13. Arduino Uno R3 87.500 1 87.500 14. K. Jumper F to M 20 cm 7.500 2 15.000 15. K. Jumper F to F 20 cm 7.500 1 7.500 16. Breadboard Sedang 20. 1 20.000 17. XT60 1 12.500 18. Kabel 1 6.000 19. Solder Viper 1 15.000 20. Timah 1 14.500 Jumlah Total 812.000 1.1.5 Prinsip Kerja
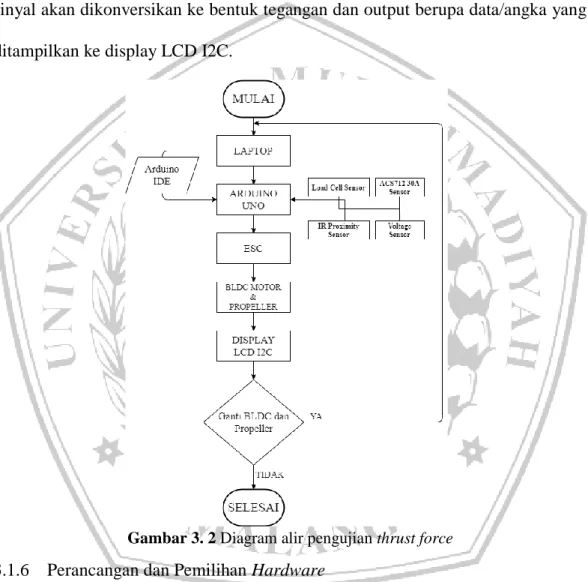
Prinsip kerja alat uji thrust force berbasis pada load cell sensor dan IR proximity sensor yaitu dengan mengatur besaran bukaan throttle yang di input melalui perangkat laptop/CCPM servotester diteruskan ke mikrokontroler berupa arduino uno melalui komunikasi serial. Setelah diproses dibagian unit pengolah diteruskan ke ESC dengan mengatur besaran jumlah energi yang dibutuhkan. Dimana sinyal yang diterima ESC melalui mikrokontroler tersebut akan diubah menjadi tegangan listrik dan arus listrik yang akan menyuplai ke brushless motor DC yang kemudian menyebabkan motor berputar. Untuk mengetahui gaya dorong atau thrust force digunakan load cell sensor yang dimana memanfaatkan regangan
pada sensor tersebut yang akan diterima oleh mikrokontroler kemudian mengirimkan data berupa angka ke display LCD I2C. Dalam pengukuran kecepatan RPM menggunakan IR proximity sensor yang dimana data yang dikirimkan ke mikrokontroler berupa sinyal akan diteruskan ke dispay LCD I2C berupa angka. Untuk mengetahui arus yang digunakan dipilih modul ACS712 30A yang mana sinyal akan dikonversikan ke bentuk tegangan dan output berupa data/angka yang ditampilkan ke display LCD I2C.
Gambar 3. 2 Diagram alir pengujian thrust force 3.1.6 Perancangan dan Pemilihan Hardware
Pada penelitian ini menggunakan beberapa komponen yang di gunakan yaitu terdiri dari:
1. Alumunium 2. 3D Printing PLA
4. Power Supply DC 12V 30A
5. Modul Load Cell sensor kapasitas 10kg 6. Modul IR proximity sensor
7. Voltage sensor 8. Sensor ACS712 30A 9. ESC 30A
10. Brushless motor DC Outrunner 1000 KV 11. Brushless motor DC Turnigy 2300 KV 12. Propeller 1045 2 blades
13. Propeller 5040 4 blades
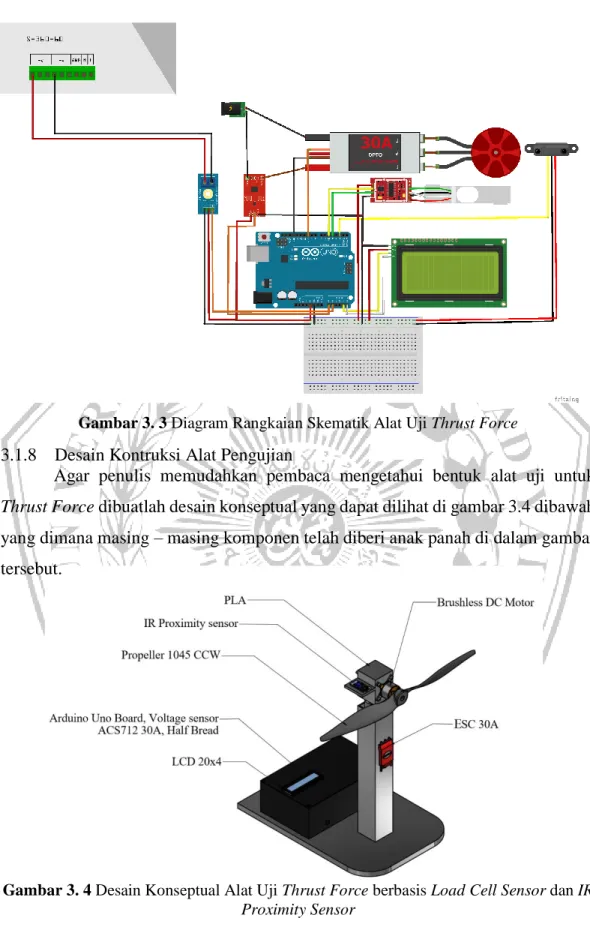
3.1.7 Diagram Skematik Rangkaian Alat Uji Thrust Force berbasis Load Cell sensor, ACS712 30A, Voltage Sensor, dan Infrared Proximity Sensor. Rangkaian skematik pada alat uji thrust force berbasis load cell sensor, ACS712 30A, voltage sensor dan infrared proximity sensor terlihat pada gambar 3.3 dibawah, pada rangkaian skematik ini merupakan gabungan dari arduino uno sebagai mikrokontroler, brushless motor DC, ESC 30A, load cell sensor, HX711, infrared proximity Sensor, volateg sensor, ACS712 30A, project board, LCD display with I2C, kabel jumper, dan CCPM servo tester. Dengan adanya diagram skematik ini lebih memudahkan untuk mengetahui tata letak dari satu komponen dengan komponen lainnya yang terhubung.
Gambar 3. 3 Diagram Rangkaian Skematik Alat Uji Thrust Force 3.1.8 Desain Kontruksi Alat Pengujian
Agar penulis memudahkan pembaca mengetahui bentuk alat uji untuk Thrust Force dibuatlah desain konseptual yang dapat dilihat di gambar 3.4 dibawah yang dimana masing – masing komponen telah diberi anak panah di dalam gambar tersebut.
Gambar 3. 4 Desain Konseptual Alat Uji Thrust Force berbasis Load Cell Sensor dan IR
3.2 Prosess Pengerjaan
Tahap ini merupakan pengerjaan pengembangan alat uji thrust force digital untuk UAV berbasis arduino uno sebagai mikrokontroler.
Alat dan bahan sebagai berikut : 3.2.1 Alat Yang digunakan
1. Obeng (+) dan (-). 2. Solder.
3. Gunting.
4. Kabel USB Serial Arduino Uno. 3.2.2 Bahan Yang Digunakan
1. PLA 3d Printing 2. Alumunium 3. Arduino Uno 4. Brushless motor 1000 Kv 5. Brushless motor 2300 Kv 6. Propeller 1045 dan 5040
7. Load cell sensor dan HX711 (driver modul) 8. Electronic Speed Control (ESC)
9. Voltage Sensor 10. ACS712 30A
11. Power Supply 12v 30A 12. Socket XT-60
13. Baut 14. Timah
3.2.3 Proses Pengerjaan dan Perancangan Alat Uji Thrust Force Berbasis Load Cell Sensor dan IR Proximity Sensor
Pada tahap ini, perancangan komponen elektronika meliputi penggabungan semua komponen elektrikal pada alat uji. Komponen yang pertama kali dipasang yaitu Electronic Speed Control (ESC) dengan BLDC (brushless motor) yang dimana kabel BEC terhubung ke GND dan Pin Sinyal PWM (~). Pastikan untuk lebih teliti dalam pemasangan kabel sumber tegangan agar tidak terjadi korslet/kerusakan pada komponen. Lakukan penyolderan pada kabel load cell sensor dengan kabel jumper female to female yang dipasang pada driver HX 711, pastikan kabel vcc dan gnd terhubung dengan benar kemudian dihubungkan ke arduino uno. IR proximity sensor memiliki 3 buah pin yang dihubungkan ke vcc , gnd, dan pin sinyal (2) di Arduino Uno. LCD I2C 20x4 dihubungkan ke arduino uno untuk memperoleh data pada tampilan LCD. Kabel vcc dan gnd yang terdapat pada arduino uno disalurkan ke project board.
b. Perakitan Komponen Elektronika dan Mekanik
Tahap ini merupakan penggabungan semua komponen non elektrikal dengan alat uji. Komponen mekanik yang telah dirancang akan disatukan dengan komponen elektrikal yang sebelumnya sudah dirakit terlebih dahulu. Di PLA 3d printing merupakan dudukan dari BLDC motor dan IR proximity sensor yang dimana dikunci dengan kuat agar tidak terlepas pada saat motor berputar.
3.3 Pengujian Alat
Dalam tahap ini, penulis melakukan pengerjaan dan pengujian alat yang dimana memfokuskan pada hasil dari tujuan yaitu gaya dorong (thrust force), kecepatan putaran pada motor (RPM), aliran arus (A) dan daya (watt) yang
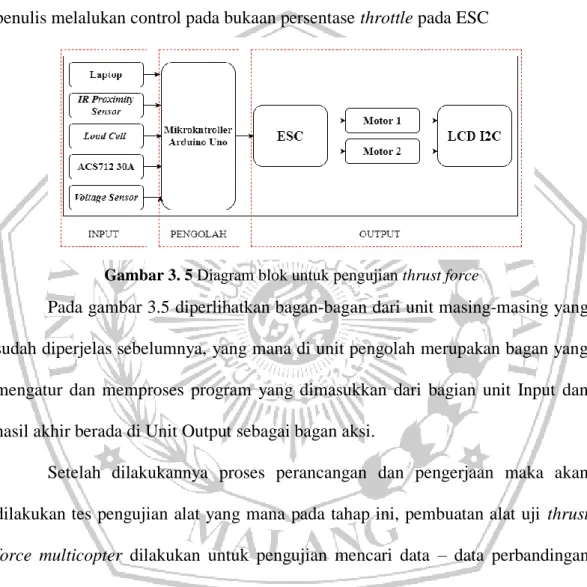
digunakan. Ada 3 tahapan proses untuk mengolah masukan sebuah program yaitu dari unit input, unit pengolah, dan unit output. Unit input menggunakan laptop, IR proximity sensor dan load cell sensor, Unit pengolah menggunakan mikrokontroler arduino uno, sedangkan ESC (Electronic Speed Control), brushless motor, dan LCD I2C digunakan sebagai unit output. Namun Sebelum melakukan pengujian, penulis melalukan control pada bukaan persentase throttle pada ESC
Gambar 3. 5 Diagram blok untuk pengujian thrust force
Pada gambar 3.5 diperlihatkan bagan-bagan dari unit masing-masing yang sudah diperjelas sebelumnya, yang mana di unit pengolah merupakan bagan yang mengatur dan memproses program yang dimasukkan dari bagian unit Input dan hasil akhir berada di Unit Output sebagai bagan aksi.
Setelah dilakukannya proses perancangan dan pengerjaan maka akan dilakukan tes pengujian alat yang mana pada tahap ini, pembuatan alat uji thrust force multicopter dilakukan untuk pengujian mencari data – data perbandingan antara persentase pembukaan throttle dengan besaran gaya dorong (g), perbandingan persentase throttle dengan besaran nilai putar (RPM), perbandingan antara persentase throttle dengan besarnya arus (A), perbandingan antara persentase throttle dengan besarnya daya (Watt). Di dalam pengujian ini menggunakan 2 variasi motor BLDC dan 2 variasi propeller yang dimana untuk pengambilan data
dari perbedaan BLDC dan propeller tersebut. Adapun tahapan proses pengujian dan pengambilan data dilakukan sebagai berikut :
1. Menghubungkan ESC dengan power supply dan dengan perantara watt meter sebagai pengukur besaran daya dan arus yang terpakai.
2. Menghubungkan kabel arduino uno ke PC untuk melakukan upload sketch/coding dan memonitor serta mengatur besaran throttle motor. 3. ESC dikalibrasi terlebih dahulu sebelum digunakan agar range signal antara
ESC dengan mikrokontroler dapat sefrekuensi.
4. Men-setup mikrokontroler arduino uno dan dihubungkan dengan laptop. 5. Menjalankan software arduino IDE dan mengupload sketch/coding
pengujian thrust force multicopter yang terdiri dari kontrol BLDC, besaran nilai RPM, dan besaran nilai gaya dorong pada board arduino Nano. 6. Input nilai persentase duty cycle PWM/Throttle pada serial monitor yaitu
sebesar (10 %, 20 %, 30 %, 40 %, 50 %, 60 %, 70 %, 80 %, 90 %, 100 %). 7. Mencatat nilai-nilai gaya dorong (g), putaran (RPM), Arus (A), dan Daya
(Watt) dari masing – masing variasi BLDC dan propeller yang tertera pada display LCD 20x4.
8. Setiap perubahan variasi diharuskan untuk melakukan kalibrasi sensor dan aplikasi agar dapat memperoleh data yang akurat dan konsisten.
3.4 Analisa Dan Pembahasan
Pada tahap ini dilakukan analisa terhadap hasil – hasil dari pengujian yang telah dilakukan. Hal ini dilakukan dengan beberapa tujuan diantaranya :
a. Mengetahui pengaruh dari variasi persentase duty cycle PWM/throttle terhadap gaya dorong, putaran, arus, dan daya.
b. Mengetahui perbandingan data diantaranya putaran motor, gaya dorong, arus dan daya dari masing – masing variasi motor dan propeller pada setiap variasi persentase duty cycle PWM/throttle yang digunakan.
c. Mengetahui Pengaruh variasi motor dan propeller diantaranya BLDC 1000 kv dengan propeller 1045 2 blades, BLDC 2300 kv dengan propeller 1045 2 blades, 1000 kv dengan propeller 5040 4 blades, BLDC 2300 kv dengan propeller 5040 4 blades.
3.5 Tempat dan Waktu
Penelitian dilakukan di Laboratorium CNC, Teknik Mesin, Fakultas Teknik Universitas Muhammadiyah Malang, pelaksanaan penelitian dilakukan selama kurang lebih bulan Juli – September tahun 2020